
Indoor Localization Algorithm Based on a High-Order Graph Neural Network

Abstract
:1. Introduction
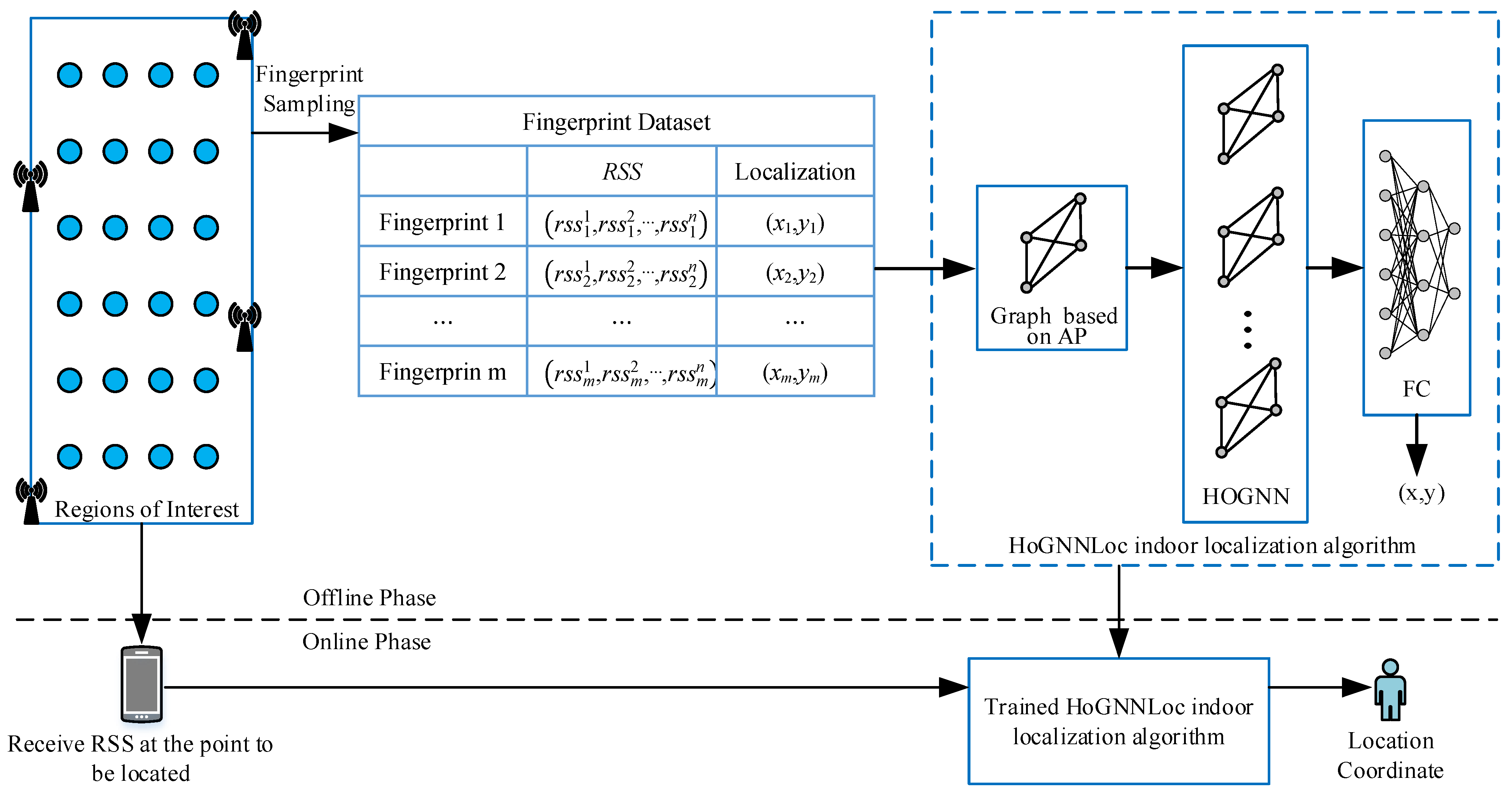
2. Algorithm Localization Principle
3. Algorithm Localization Model
3.1. Problem Formulation
3.2. Graph Structure Based on Adjacency Matrix Design
3.3. Network Model
4. Experiments
4.1. Fingerprint Dataset
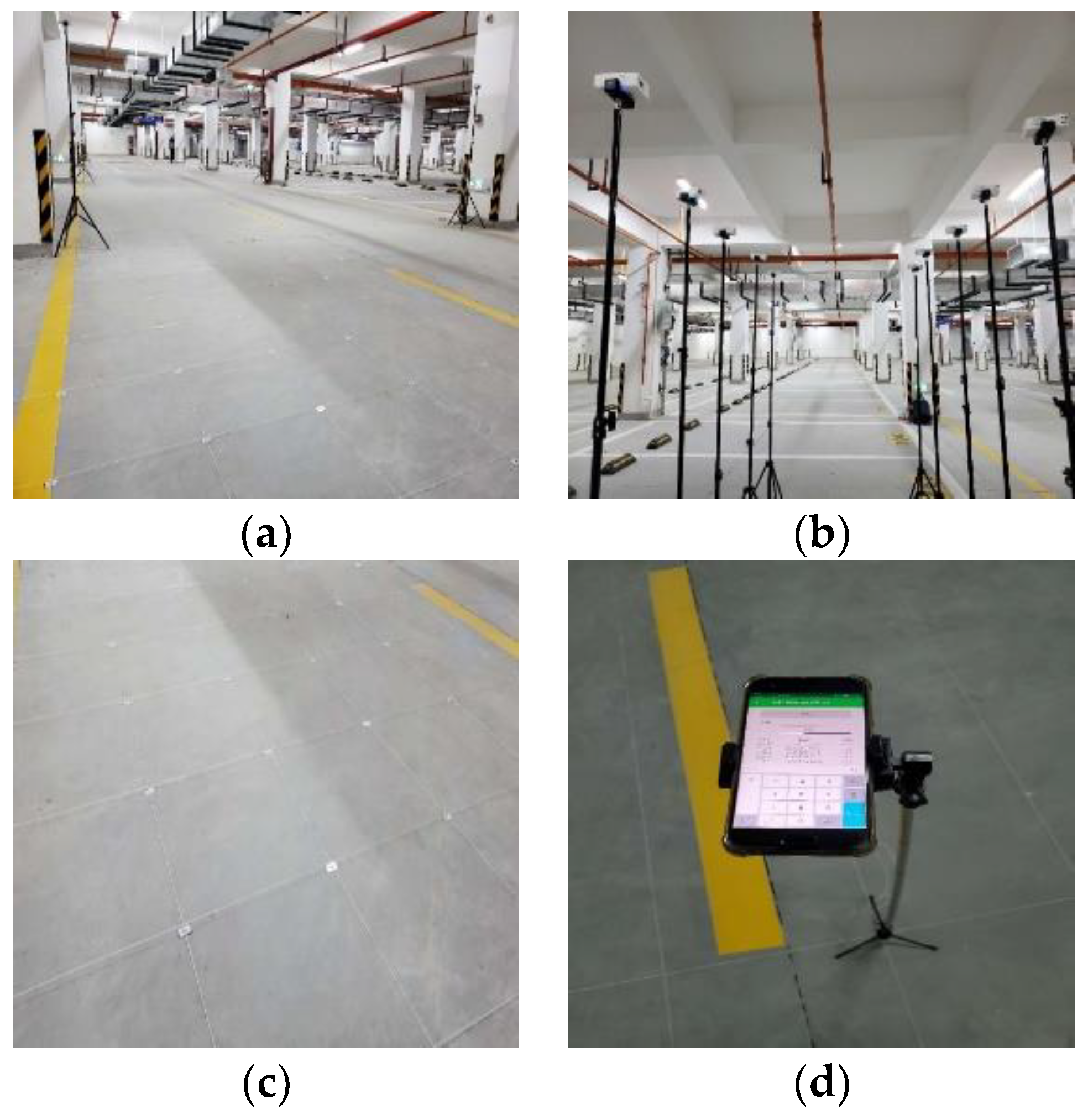
4.1.1. Self-Built Underground Garage Dataset
4.1.2. SoLoc Dataset
4.2. Algorithm Model Configuration
4.3. Results and Analysis
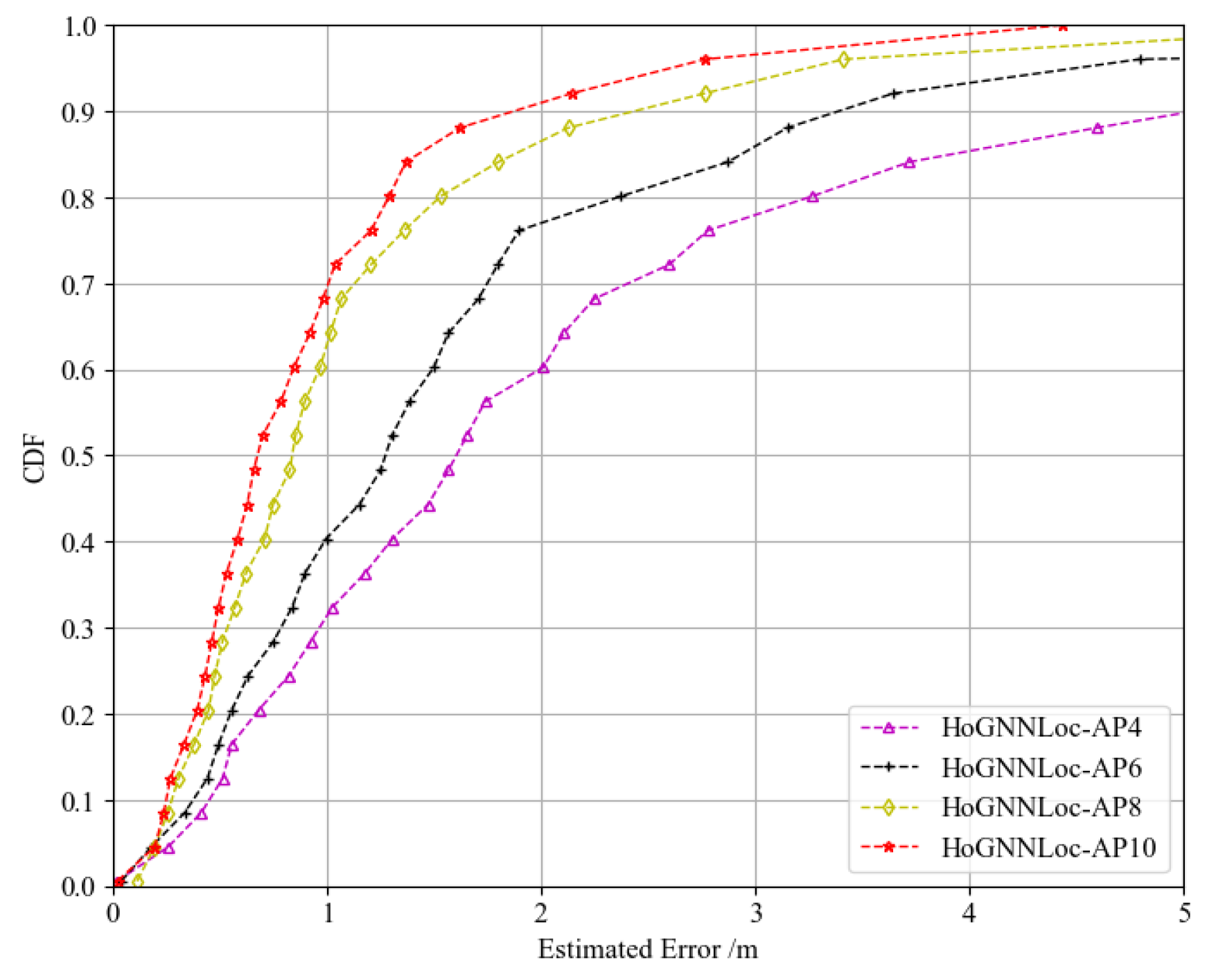
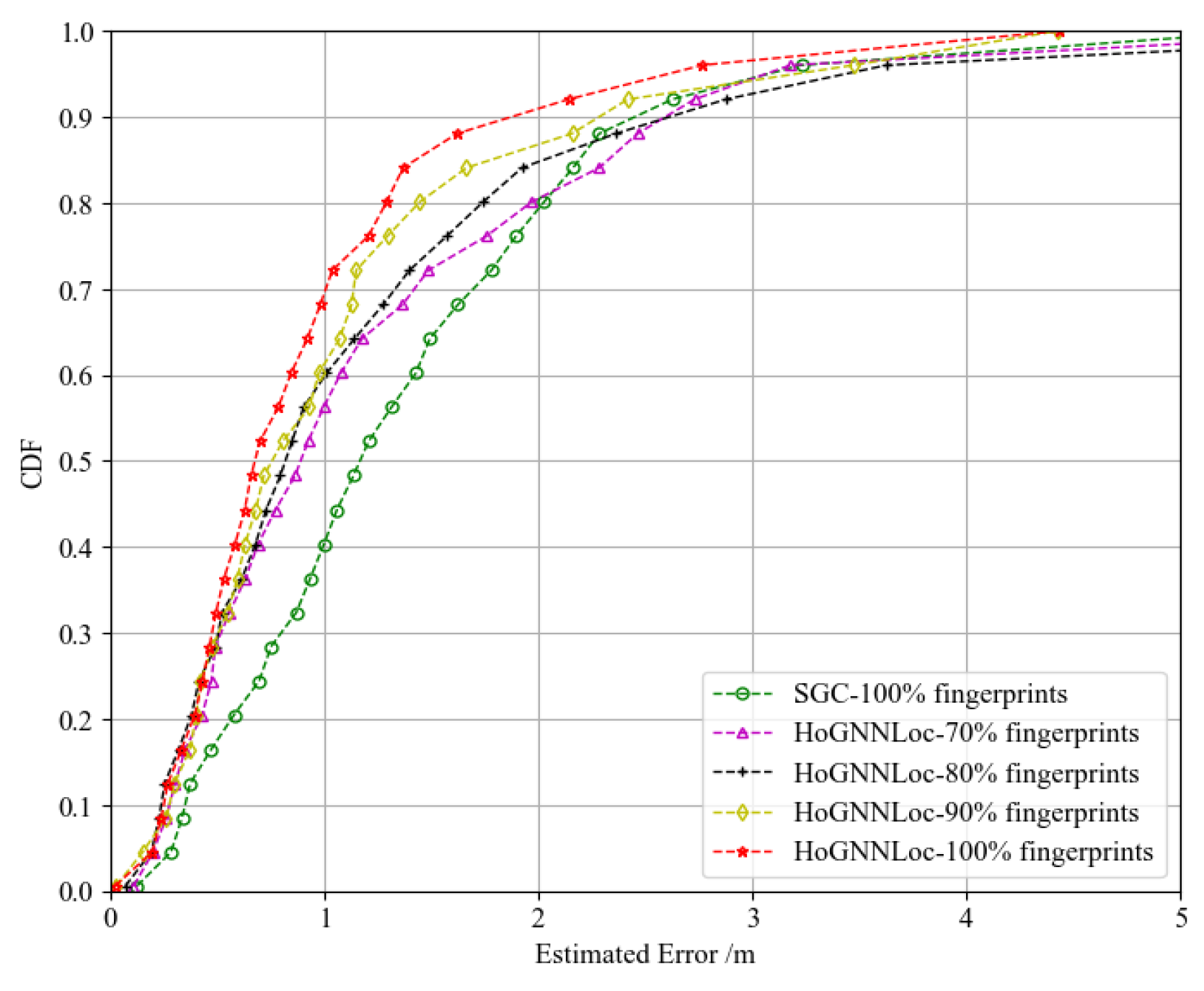
4.3.1. Results on the Self-Built Underground Garage Dataset
4.3.2. Results Based on the SoLoc Dataset
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zafari, F.; Gkelias, A.; Leung, K.K. A survey of indoor localization systems and technologies. IEEE Commun. Surv. Tutor. 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Kunhoth, J.; Karkar, A.G.; Al-Maadeed, S.; Al-Ali, A. Indoor positioning and wayfinding systems: A survey. Hum. Centric Comput. Inf. Sci. 2020, 10, 1–41. [Google Scholar] [CrossRef]
- Zou, H.; Jin, M.; Jiang, H.; Xie, L.; Spanos, C.J. WinIPS: WiFi-based non-intrusive indoor positioning system with online radio map construction and adaptation. IEEE Trans. Wirel. Commun. 2017, 16, 8118–8130. [Google Scholar] [CrossRef]
- Zhang, M.; Jia, J.; Chen, J.; Deng, Y.; Wang, X.; Aghvami, A.H. Indoor localization fusing wifi with smartphone inertial sensors using lstm networks. IEEE Internet Things J. 2021, 8, 13608–13623. [Google Scholar] [CrossRef]
- Yu, Y.; Chen, R.; Chen, L.; Zheng, X.; Wu, D.; Li, W.; Wu, Y. A novel 3-D indoor localization algorithm based on BLE and multiple sensors. IEEE Internet Things J. 2021, 8, 9359–9372. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, J.; Zhang, Y.; Cheng, L.; Wang, W.; Wang, Z.; Xu, W.; Li, Z. Vernier: Accurate and fast acoustic motion tracking using mobile devices. IEEE Trans. Mob. Comput. 2019, 20, 754–764. [Google Scholar] [CrossRef]
- Jia, S.; Ma, L.; Yang, S.; Qin, D. Semantic and context based image retrieval method using a single image sensor for visual indoor positioning. IEEE Sens. J. 2021, 21, 18020–18032. [Google Scholar] [CrossRef]
- Chen, P.; Shang, J.; Gu, F. Learning RSSI feature via ranking model for Wi-Fi fingerprinting localization. IEEE Trans. Veh. Technol. 2019, 69, 1695–1705. [Google Scholar] [CrossRef]
- Tao, Y.; Zhao, L. Fingerprint localization with adaptive area search. IEEE Commun. Lett. 2020, 24, 1446–1450. [Google Scholar] [CrossRef]
- Wu, C.; Yang, Z.; Xiao, C. Automatic radio map adaptation for indoor localization using smartphones. IEEE Trans. Mob. Comput. 2017, 17, 517–528. [Google Scholar] [CrossRef]
- Davidson, P.; Piché, R. A survey of selected indoor positioning methods for smartphones. IEEE Commun. Surv. Tutor. 2016, 19, 1347–1370. [Google Scholar] [CrossRef]
- Bellavista-Parent, V.; Torres-Sospedra, J.; Pérez-Navarro, A. Comprehensive analysis of applied machine learning in indoor positioning based on wi-fi: An extended systematic review. Sensors 2022, 22, 4622. [Google Scholar] [CrossRef]
- Liu, W.; Chen, H.; Deng, Z.; Zheng, X.; Fu, X.; Cheng, Q. LC-DNN: Local connection based deep neural network for indoor localization with CSI. IEEE Access 2020, 8, 108720–108730. [Google Scholar] [CrossRef]
- Jia, B.; Liu, J.; Feng, T.; Huang, B.; Baker, T.; Tawfik, H. TTSL: An indoor localization method based on Temporal Convolutional Network using time-series RSSI. Comput. Commun. 2022, 193, 293–301. [Google Scholar] [CrossRef]
- Khatab, Z.E.; Gazestani, A.H.; Ghorashi, S.A.; Ghavami, M. A fingerprint technique for indoor localization using autoencoder based semi-supervised deep extreme learning machine. Signal Process. 2021, 181, 107915. [Google Scholar] [CrossRef]
- Bronstein, M.M.; Bruna, J.; LeCun, Y.; Szlam, A.; Vandergheynst, P. Geometric Deep Learning: Going beyond Euclidean data. IEEE Signal Process. Mag. 2017, 34, 18–42. [Google Scholar] [CrossRef]
- Wu, Z.; Pan, S.; Chen, F.; Long, G.; Zhang, C.; Philip, S.Y. A comprehensive survey on graph neural networks. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 4–24. [Google Scholar] [CrossRef] [PubMed]
- Chiou, M.J.; Liu, Z.; Yin, Y.; Liu, A.A.; Zimmermann, R. Zero-shot multi-view indoor localization via graph location networks. In Proceedings of the 28th ACM International Conference on Multimedia, Seattle, WA, USA, 12–16 October 2020; pp. 3431–3440. [Google Scholar]
- Lezama, F.; González, G.G.; Larroca, F.; Capdehourat, G. Indoor Localization using Graph Neural Networks. In Proceedings of the 2021 IEEE URUCON, Montevideo, Uruguay, 24–26 November 2021; pp. 51–54. [Google Scholar]
- Zhou, M.; Tang, Y.; Nie, W.; Xie, L.; Yang, X. GrassMA: Graph-based semi-supervised manifold alignment for indoor WLAN localization. IEEE Sens. J. 2017, 17, 7086–7095. [Google Scholar] [CrossRef]
- Zhou, J.; Cui, G.; Hu, S.; Zhang, Z.; Yang, C.; Liu, Z.; Wang, L.; Li, C.; Sun, M. Graph neural networks: A review of methods and applications. AI Open 2020, 1, 57–81. [Google Scholar] [CrossRef]
- Morris, C.; Ritzert, M.; Fey, M.; Hamilton, W.L.; Lenssen, J.E.; Rattan, G.; Grohe, M. Weisfeiler and leman go neural: Higher-order graph neural networks. In Proceedings of the AAAI Conference on Artificial Intelligence, the Hilton Hawaiian Village, Honolulu, HI, USA, 27 January–1 February 2019; Volume 33, pp. 4602–4609. [Google Scholar]
- Le, D.V.; Havinga, P.J.M. Soloc: Self-organizing indoor localization for unstructured and dynamic environments. In Proceedings of the 2017 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sapporo, Japan, 18–21 September 2017; pp. 1–8. [Google Scholar]
- Wu, F.; Souza, A.; Zhang, T.; Fifty, C.; Yu, T.; Weinberger, K. Simplifying graph convolutional networks. In Proceedings of the International Conference on Machine Learning, Long Beach, CA, USA, 9–15 June 2019; pp. 6861–6871. [Google Scholar]
- Velickovic, P.; Cucurull, G.; Casanova, A.; Romero, A.; Lio, P.; Bengio, Y. Graph attention networks. arXiv 2017, arXiv:1710.10903v3. [Google Scholar]
- Luo, X.; Meratnia, N. A geometric deep learning framework for accurate indoor localization. In Proceedings of the 2022 IEEE 12th International Conference on Indoor Positioning and Indoor Navigation (IPIN), Beijing, China, 5–8 September 2022; pp. 1–8. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Network Layer | Input Shape | Output Shape | Activation | Dropout |
|---|---|---|---|---|
| HoGNN | 1 × N | 20 × N | ReLU | Yes |
| FC1 | 20 × N | 64 | ReLU | No |
| FC2 | 64 | 2 | No | No |
| Parameter Name | Parameter Value |
|---|---|
| Dropout | 0.3 |
| Activation | ReLU |
| Optimizer | Adam |
| Learning Rate | 0.0005 |
| Loss Function Epoch | MSE 1000 |
| Batch Size | 32 |
| Localization Algorithms | Average Offline Training Time per Epoch (ms) | Average Online Testing Time per Time (ms) |
|---|---|---|
| DNN | 102.67 | 0.06 |
| SGC | 133.75 | 0.10 |
| GAT | 189.24 | 0.11 |
| HoGNNLoc | 126.16 | 0.07 |
| Localization Algorithms | Lower Quartile (m) | Median (m) | Upper Quartile (m) |
|---|---|---|---|
| KNN | 3.85 | 5.98 | 7.97 |
| DNN | 3.46 | 5.17 | 7.22 |
| SGC | 3.09 | 4.64 | 7.10 |
| GAT | 2.77 | 4.33 | 6.60 |
| GraphSAGE-LSTM-edge | 2.28 | 3.52 | 5.13 |
| HoGNNLoc | 2.26 | 3.24 | 5.32 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, X.; Liang, X.; Liang, Q. Indoor Localization Algorithm Based on a High-Order Graph Neural Network. Sensors 2023, 23, 8221. https://doi.org/10.3390/s23198221
Kang X, Liang X, Liang Q. Indoor Localization Algorithm Based on a High-Order Graph Neural Network. Sensors. 2023; 23(19):8221. https://doi.org/10.3390/s23198221
Chicago/Turabian StyleKang, Xiaofei, Xian Liang, and Qiyue Liang. 2023. "Indoor Localization Algorithm Based on a High-Order Graph Neural Network" Sensors 23, no. 19: 8221. https://doi.org/10.3390/s23198221
APA StyleKang, X., Liang, X., & Liang, Q. (2023). Indoor Localization Algorithm Based on a High-Order Graph Neural Network. Sensors, 23(19), 8221. https://doi.org/10.3390/s23198221