2.1. CS Detection Methodology
In an urban area, it is difficult to detect a CS by using a single-frequency receiver because the position is uncertain, necessitating a consistency check or position estimation. In general, it is vital to evaluate what to compare against and how to compare in order to recognize an outlier. A position domain or a time domain classification can be applied to the comparison target. Specific positions are compared, or a rate of change over time is targeted. A consistency test that compares multiple items against one and a method that compares estimations and observations are two types of comparison procedures. Detection is achieved by dividing the position-based domain and the range-based domain in the field of satellite navigation, which determines positions using triangulation utilizing measurements.
To detect a CS in each channel independently, detection should be conducted in a range-based domain rather than a position-based comparison target. The difficulty is that a comparison target, such as the consistency technique, is necessary to detect the existence or absence of an anomaly in the channel, whereas abrupt changes can be detected using the signal ratio [
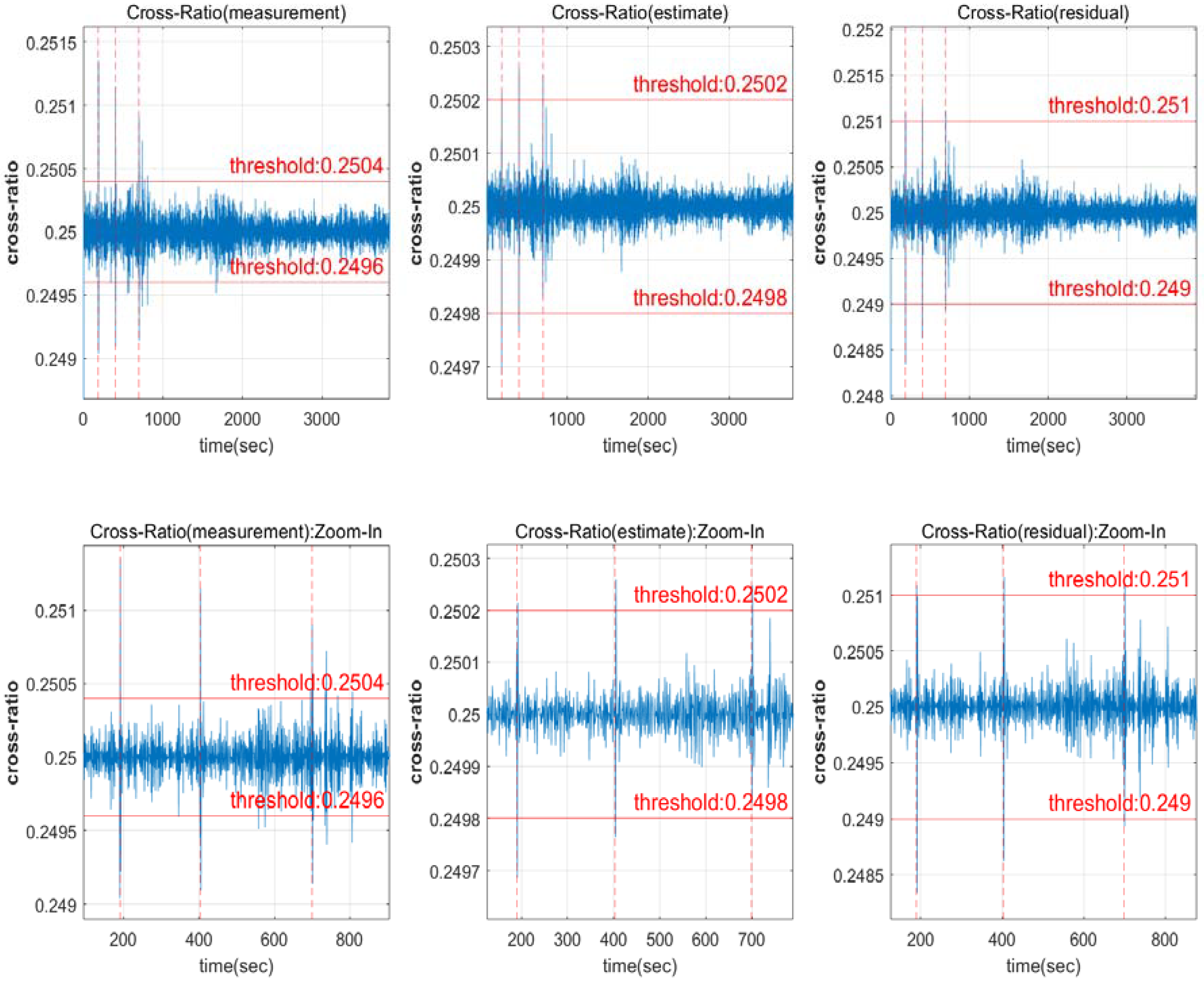
32]. Setting up a threshold as a judgement criterion is necessary to detect a ratio for each channel, and an invariant intersection (cross-)ratio can be a criterion in the projective transformation of the geometry [
33]. The invariance of the cross-ratio may indicate that all channels have the same ratio and could also be used to create a threshold based on the size of the CS.
Models for analytic solutions and the cross-ratio are explained in this study. The cross-ratio is then used to examine the performance in the detection of CSs. In addition, the robustness of the suggested CS detection approach is proven using the multi-channel detection method by focusing on the possible scenarios.
2.2. GPS Observation Model
The following equations are used to represent carrier phase measurements for single, double, and triple differentials. An observation model of carrier phase measurements can be found in Equation (1) below.
where
is the measured phase between the satellite and the receiver (m);
is the wavelength of the carrier signal;
is the integer ambiguity term;
is the true range between the satellite and the receiver (m);
is the speed of light (m/s);
is the receiver clock bias (sec);
is the satellite clock bias (sec);
is the ionospheric delay (m);
is the tropospheric delay (m);
represents the receiver measurement noise and multipath or modeling errors (m).
The Doppler measurement has the following relationship (Equation (2)).
where
is the observed Doppler shift;
is the line-of-sight range rate.
Using an observation model, Equations (3)–(5) are utilized to express the carrier phase with a single difference, double difference, and triple difference.
where
is the single difference between two receivers;
is equal to
as the clock bias between receivers (m).
where
is the single difference between satellites, so
is called the double difference.
where
is the time difference between epochs, so
is called the triple difference.
The double difference is used to eliminate the satellite and receiver clock bias, and the triple difference can be used to remove the ambiguous integer
. The following equation (Equation (6)) is obtained when the observation model is transformed to the user’s position.
where
equals
as a double-differentiated carrier phase measurement;
is the double-differentiated LOS (line-of-sight) vector which means that the single differential LOS between two receivers is the same, and the double differential LOS between two satellites is
;
is the position of the rover (user);
is the position of the reference station.
To make the expression even simpler, the subscripts () used later could be removed, making a double-differentiated value, and a clear expression could be used if necessary. Furthermore, the ambiguous integer expressed in the following means the ambiguous integer multiplied by with the distance unit.
2.3. The Doppler and Phase Rate of Change Relationship
The following status of an instantaneous epoch is described in the observation model above, and it is intended to indicate that the change in the user’s position compared to the change in the satellite’s position has a significant impact on the measured value [
34]. The following equation (Equation (7)) is produced by substituting the above Equations (4) and (6).
where
is the distance vector between two user positions that are observing simultaneously.
A total differential with an ambiguous integer is the following in Equation (7).
where
is expressed in units of the satellite change rate
between two consecutive epochs.
If a CS occurs at moment
, the CS can be represented as stated in Equation (9).
where
represents the changes in the user’s position between two consecutive epochs.
Tropospheric delay is negligible when sampling at 1-s intervals under a very high level of ionospheric activities [
8], and it needs an assumption that the influence of ionospheric delay is neglected by considering relative measures between consecutive epochs. If
is set to
in the preceding expression, it is calculated as a small change value, as shown in Equation (10) below.
where the approximate distance between the reference station and the satellite is 20,200 km; the satellite speed is 3.89 km/s; the pre-position error is 10 m (estimated by the code measurement); the sampling interval is 1 s; the error range is approximately 0.01 cycle.
It can be theoretically approximated with an observation error of a 0.02 cycle size, as shown above [
35].
The value caused by the change rate of the carrier phase is estimated entirely as a change in the user’s position by treating the value caused by the satellite change as noise with a size of 0.02 cycle, as shown in Equation (11).
The rate of change in
stated above is expressed as the rate of change in the observed carrier phase between two consecutive epochs in the model equation for the relationship between the measured carrier phase and Doppler, which is shown in Equation (12) below [
18].
The carrier phase measurement can be determined by integrating the Doppler measurement at each moment, as indicated in Equation (13).
The following are the steps for estimating the measured phase using discrete Doppler measurements (14) [
36].
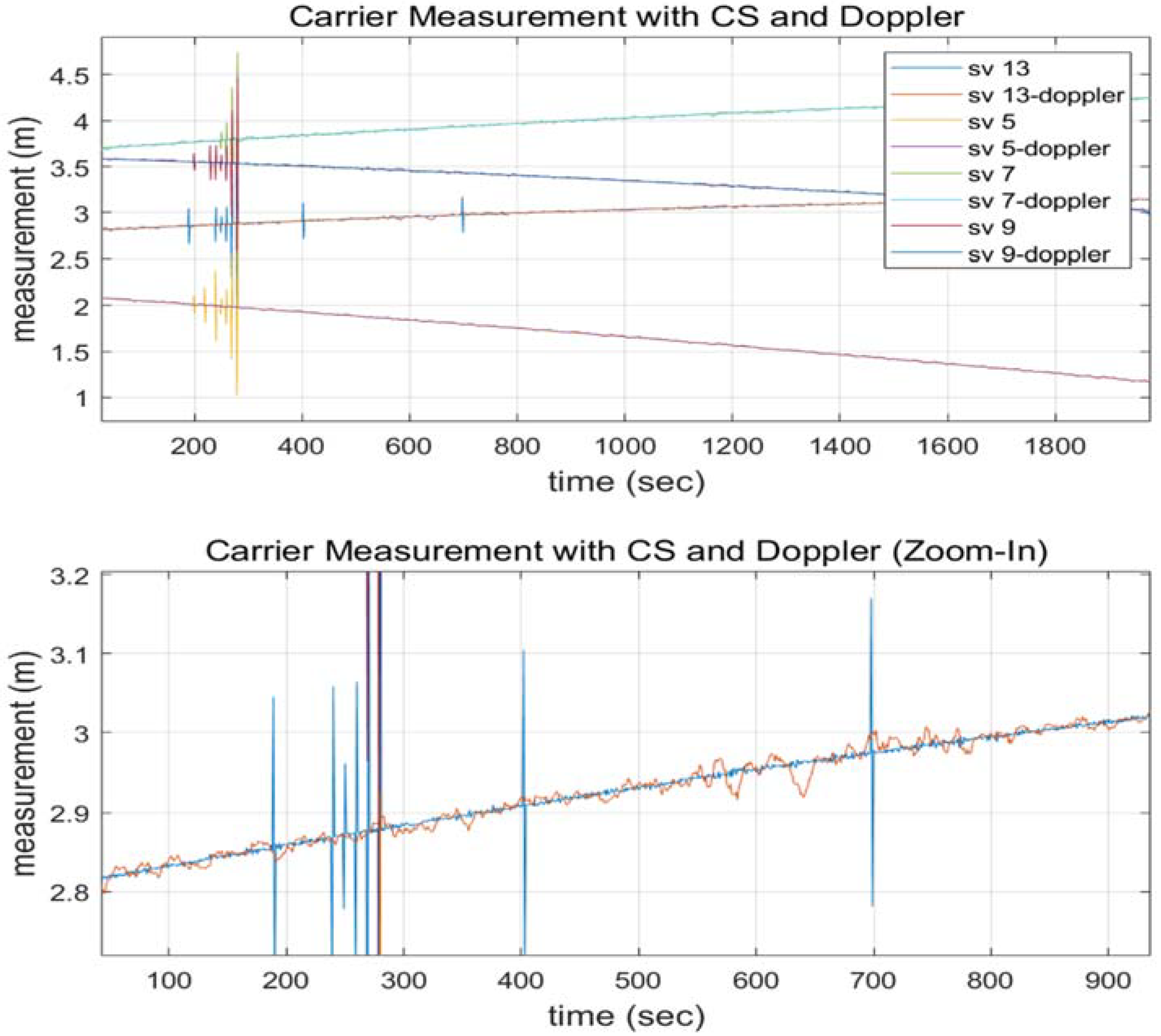
The difference may be monitored from the time-differentiated phase by using the Doppler characteristic that is insensitive to CSs, as indicated in Equation (14) above, and the occurrence of CSs can be validated by setting the Doppler as an average as the estimation of the phase rate changes [
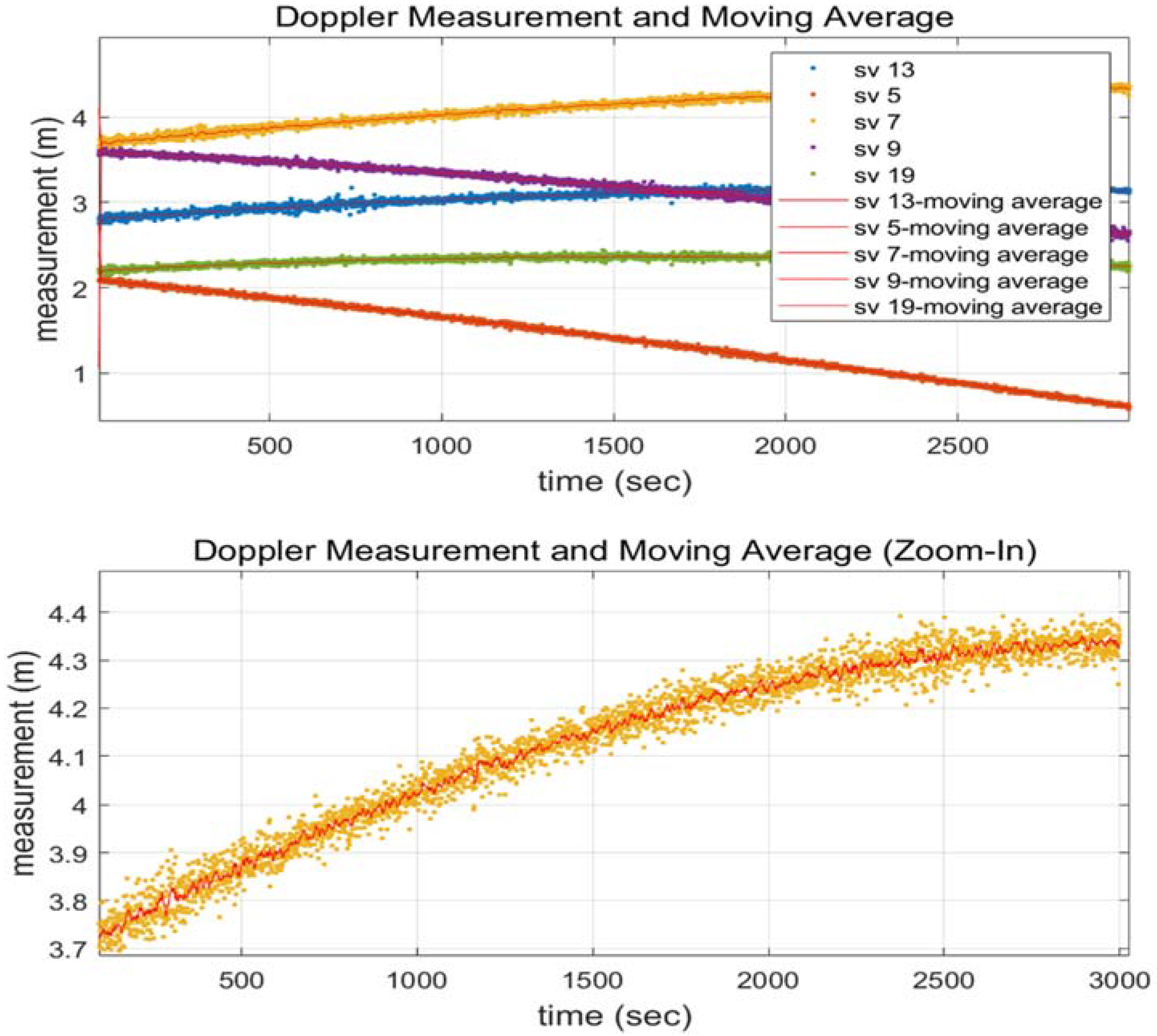
9]. Since the carrier predicts a value with a comparison method through Doppler measurement, as shown in Equation (14), the rate of change occurs when a CS occurs, as shown in Equation (11), through the difference between the carrier phase measurement value change and the average Doppler measurement value. However, depending on the receiver and dynamic state, the Doppler measurement has considerable distortion and noise, necessitating a proper solution [
22]. The Doppler measurement varies substantially depending on the signal quality, such as the satellite elevation and C/N0, and varies greatly from receiver to receiver. If the average Doppler value is adopted, the weights for each altitude and receiver must be calculated and added to the threshold, as shown in Equation (14). The least squares (LS) method is used to determine whether or not a CS is present by comparing the residuals between channels. When the LS turns dynamically, the calculation becomes complicated due to the statistical character of the LS, as the residuals change even for the same channel [
34].
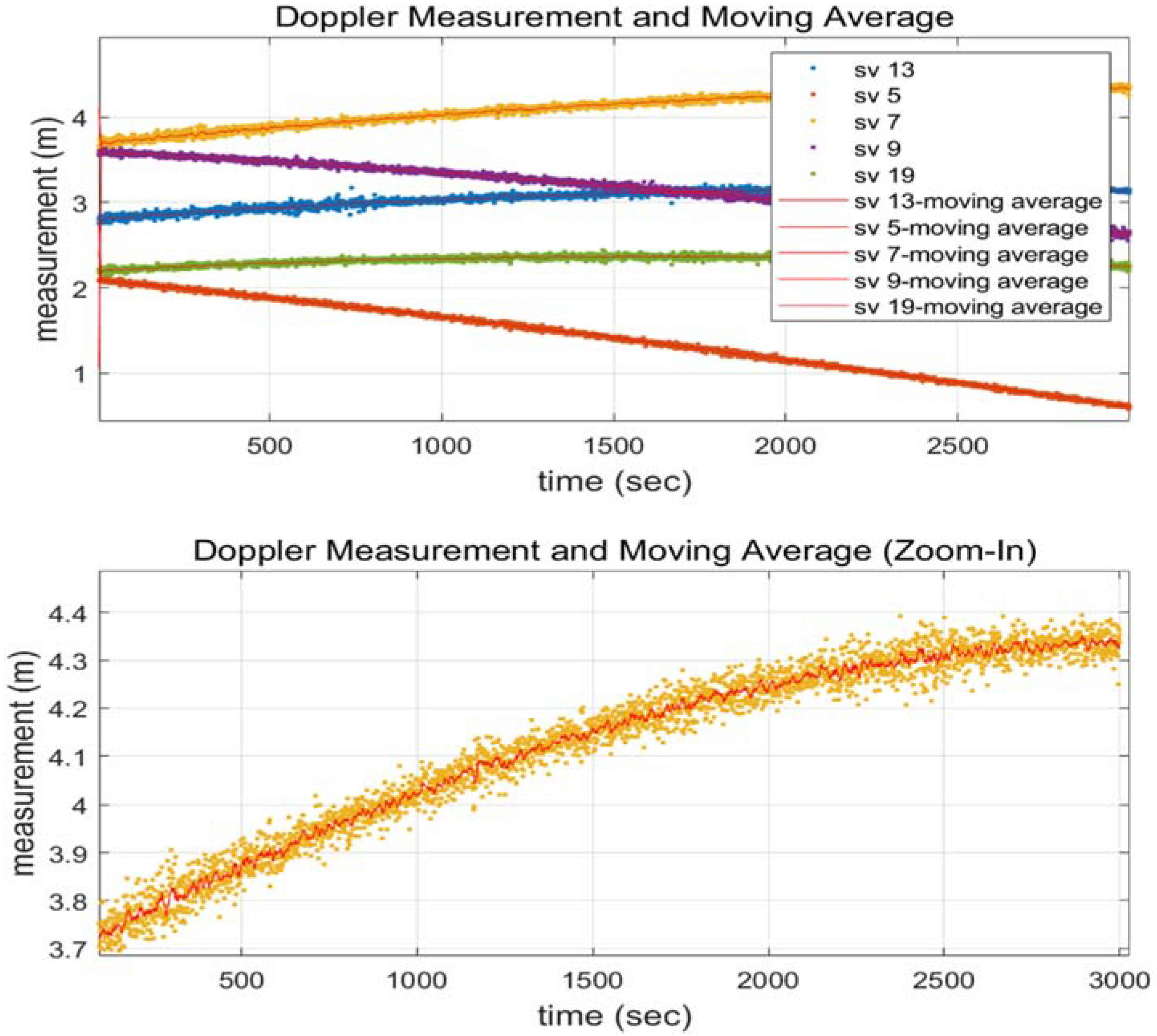
To eliminate the Doppler error and noise, a Doppler measurement was utilized with a double-differentiated carrier phase and a moving average filter to remove the noise. The carrier phase measurement using the double difference, in particular, reduced errors considerably. In the case of Doppler measurements, the receiver clock bias was removed by using the double difference, and the measurement noise was decreased by using the moving average filter under dynamic conditions.
2.4. Cross-Ratio CS Detection Technique
When one plane is projected onto another, a transformation relationship between the projected matching points is established, and this transformation relationship is known as homography. Planar homography in computer vision refers to the ability to translate points on a plane into a homography relationship between the points collected by each camera. Satellite navigation receivers may benefit from the same geometry used in computer vision. Because they are distant compared to the distance between both the receivers in the case of a single carrier phase difference, GPS satellites may be considered as points on a plane. The transformation relationship between the image points obtained by the two cameras may be treated as a single differential phase measurement, and each receiver can be compared to the camera taking points on the plane. Planar homography is the transformation relationship between identical points captured by two cameras, and it contains projective geometry properties.
where
is the distance between two points in one dimension as a determinant;
is a point in the homogeneous coordinates.
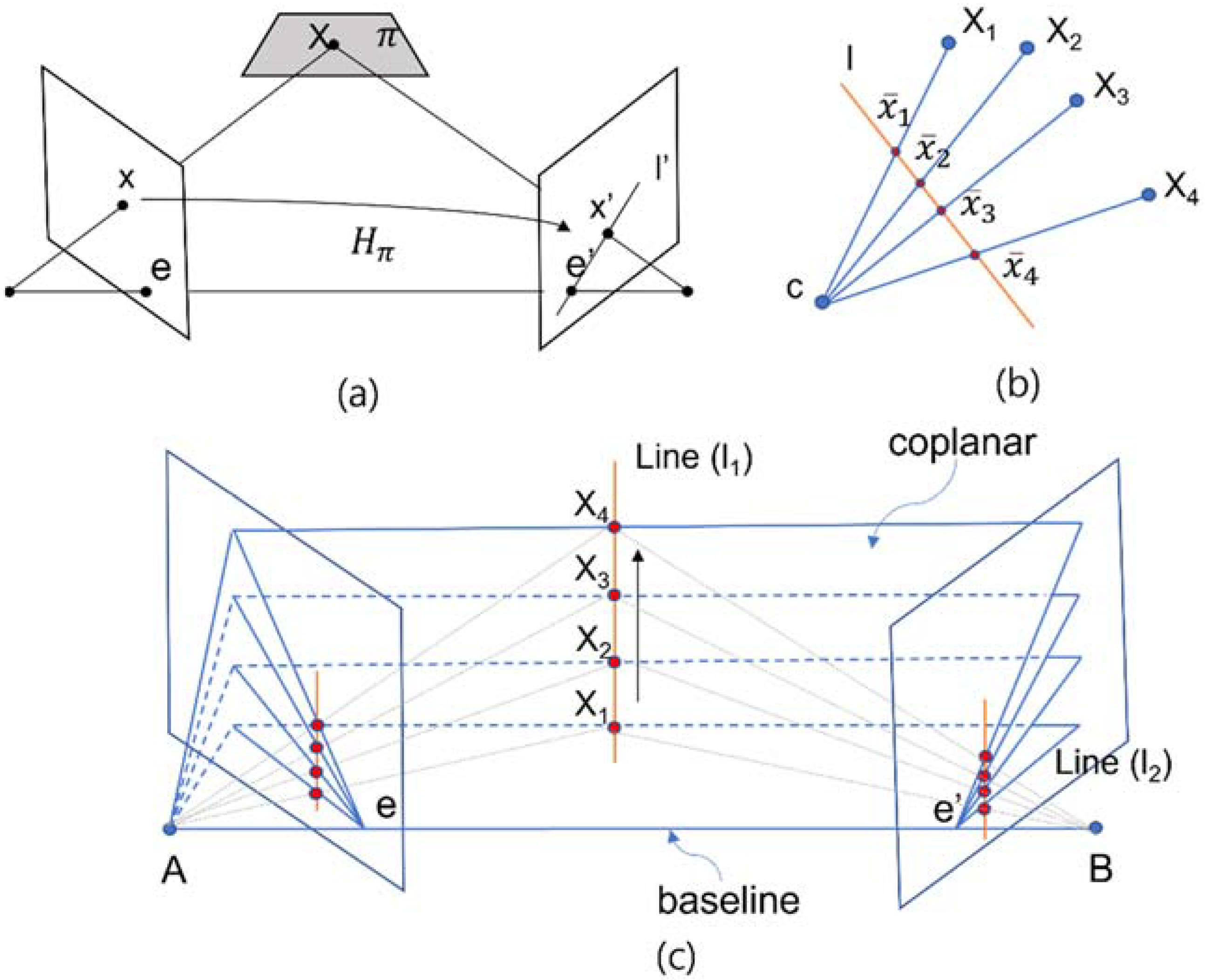
Hartley and Zisserman (2003, 259) stated that the epipolar line is the projection in the second image of the ray from the point x through the camera center C of the first camera. Thus, there is a map
from a point in one image to its corresponding epipolar line in the other image, which derives the homogeneous representative. The ray corresponding to a point
is extended to meet the plane
in a point
in
Figure 1a. Hartley and Zisserman (2003, 259) defined epipolar lines as follows: “An epipolar line is the intersection of an epipolar plane with the image plane. All epipolar lines intersect at the epipole. An epipolar plane intersects the left and right image planes in epipolar lines, and defines the correspondence between the lines”. As scholars have pointed out, a geometric derivation of corresponding points:
Consider a plane in space not passing through either of the two camera centres. The ray through the first camera centre corresponding to the point meets the plane in a point . This point is then projected to a point in the second image. This procedure is known as transfer via the plane . Since lies on the ray corresponding to , the projected point must lie on the epipolar line corresponding to the image of this ray …. The points and are both images of the 3D point lying on a plane. The set of all such points in the first image and the corresponding points in the second image are projectively equivalent, since they are each projectively equivalent to the planar point set . Thus there is a 2D homography mapping each to .
(Hartley and Zisserman, 2003, 261)
In
Figure 1b, the line
is in the time domain. Points such as
represent the single differential receiver, and point c describes the satellite. Note how
Figure 1b may be thought of as representing a projection of points in
into a 1D image:
If c represents a camera centre, and the line represents an image line (1D analogue of the image plane), then the points are the projections of points into the image. The cross-ratio of the points characterizes the projective configuration of the four image points. Note that the actual position of the image line is irrelevant as far as the projective configuration of the four image points is concerned—different choices of image line give rise to projectively equivalent configurations of image points.
(Hartley and Zisserman, 2003, 64)
Due to the similarity between the epipolar view and differential satellite navigation, we can make the following replacements in
Figure 1c:
Single differential case: points and B are receivers, and is a satellite;
Double differential case: points and B are satellites, and is a single differential receiver;
Triple differential case: is acquired sequentially from the double differential receiver’s measurement.
In
Figure 1a, lines
and
are in a relationship as a projective transformation. Therefore, we can apply the cross-ratio to the CS per channel through the concept of projective mapping. In
Figure 1b,c, each point
in the homogeneous coordinates
is a finite point, and the homogeneous representative is chosen such that
(time or epoch); therefore,
represents the signed double differential phase measurement on each epoch. The homography between corresponding lines
is induced by the projection of points. Additionally, Hartley and Zisserman stated, “A
image is formed by the intersection of the rays
with the image line
. The set of image points
is projectively equivalent to the set of rays
. For four points, the projective equivalence class of the image is determined by the cross-ratio of the points” (Hartley and Zisserman, 2003, 553).
At the same epoch, the difference between the double differential carrier phase measurement and the Doppler measurement is projected onto the baseline in
Figure 1c. We can acquire the cross-ratio of points, which is the triple differential observation value in each channel.
This method finds the cross-ratio of each channel, and therefore it does not require any estimation or redundancy. An individual CS for each channel can be detected, and the comparison check for each channel can be performed using the consistency check via the ratio. Furthermore, due to the application of the geometric concept, the detectable CS size is determined by the signal quality rather than the physical distance between the receivers.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}