1. Introduction
In recent years, interest in Unmanned Aerial Vehicles (UAVs) [
1] has grown considerably, given the wide range of possibilities they offer. Within this revolution, it is more than likely that, in the short or medium term, the airspace of the metropolitan environment will be shared by “traditional” manned aerial vehicles and UAVs, which will be mainly electric and will have vertical takeoff and landing capabilities (eVTOL) [
2]. These UAVs will fly autonomously [
3] at low or very low altitude levels, covering a wide range of services, including the transport of goods or people, and contributing to reducing the surface and sub-surface congestion and the carbon footprint produced by our daily activity. These scenarios are called Urban Air Mobility/Advanced Air Mobility (UAM/AAM) [
4].
Several public and private organizations have begun to restructure the airspace to integrate UAVs into it. In this sense, the concept of UTM (Unmanned Aircraft System Traffic Management) has been developed in the United States [
5,
6], while in Europe, this initiative has adopted the name U-Space [
7,
8]. Similar initiatives have appeared in other geographical areas, such as Korea [
9] and Australia [
10].
Conflict management is one of the many technical challenges to be solved in this scenario. Here, a “conflict” is understood as a situation in which two or more UAVs are at a distance less than a minimum separation predetermined by regulation. This is a classic problem in traditional Air Traffic Management (ATM) [
11], where it is called Conflict Detection and Resolution (CD&R), and there are already countless resolution proposals [
12,
13]. In short, the aim is to avoid the occurrence of a collision between two aircraft at all costs.
One possible way of classifying conflict management techniques is to differentiate between those that obtain a priori a set of conflict-free routes or flight plans for the UAVs and those that detect conflicts during flight and resolve them by modifying the flight plan of the UAVs involved. Along the same lines, both UTM and U-space distinguish between strategic (pre-flight) and tactical (in-flight) conflict management.
Within the second group of techniques, there are strategies based on the calculation of the space of valid velocities that prevent any potential conflict between UAVs, such as the popular ORCA (Optimal Reciprocal Collision Avoidance) algorithm [
14] and, more recently, the BBCA (Bounding Box Collision Avoidance) algorithm [
15]. Still, there are also numerous force-based strategies, such as APF (Artificial Potential Field) [
16], or swarm intelligence algorithms, such as PSO (Particle Swarm Optimization) [
17]. It is also worth mentioning the existence of a group of methods, referred to as “sense-and-avoid,” in which the UAV is equipped with special hardware (LiDAR type) that allows a fast response in case of imminent collision [
18,
19].
One of the main characteristics of U-Space is that all operations must be safe. In this sense, and from the perspective of tactical conflict management, this paper presents a new proposal for navigating autonomous UAVs in UAM scenarios that manages to avoid any conflict between them while executing their corresponding flight plans.
Our proposal, called PCAN (Prediction-based Conflict-free Adaptive Navigation), is based on predicting the conflict based on estimating the future position of the UAVs. To prevent the occurrence of each predicted conflict, PCAN proceeds to adapt the velocity vector of the UAVs involved, considering the airspace situation. PCAN works in a centralized way, from the position, velocity, and destination information of all UAVs flying over the airspace.
Apart from preventing the occurrence of any conflict between the UAVs in flight, the proposed algorithm has a low computational cost, which makes it very suitable for urban mobility environments with a high density of UAVs, where fast response to conflicts is demanded. Additionally, as we will proof, the overhead (in terms of flight time and distance traveled by the UAVs) of avoiding all conflict is more than reasonable.
The rest of the paper is structured as follows. Next,
Section 2 describes the U-Space context, as well as different techniques for in-flight conflict management. Then,
Section 3 focuses on the detailed description of our proposal.
Section 4 includes an analysis of the PCAN algorithm in various scenarios and its comparison with similar proposals. Finally,
Section 5 presents our conclusions and outlines future works in this line.
3. Conflict-Free Navigation
This section presents our proposal for conflict-free navigation in UAM scenarios, which we have named PCAN (Prediction-based Conflict-free Adaptive Navigation). PCAN aims to avoid any conflict between a set of UAVs in flight, regardless of the airspace configuration. As the strategy will be based on modifying the velocity vector of the UAVs, the algorithm should try to introduce as little change as possible in the optimal velocity of each UAV. We will understand as optimal a solution in which the UAVs fly in a straight line towards their destination, traveling at the maximum possible velocity (which we call ). We call this strategy the “direct” method or algorithm.
We will base the choice of the new velocity vector for each UAV on the future state of the airspace. Considering the future position of a set of UAVs, we will decide which ones should modify their velocity vector and which ones should not to reach a conflict-free solution. PCAN employs two strategies to modify the velocities: 1) modify the direction of the velocity vector with a certain angle and 2) modify the modulus of the velocity vector, reducing the flight velocity below the maximum, but maintaining the direction and sense. Both modifications will be made on the direct velocity, trying to alter it as little as possible.
From now on, ”airspace” refers to the region of the space where UAVs fly. We assume that all UAVs fly at the same altitude. Consequently, we tackle conflict detection in the 2D plane, working on an area where UAVs move from their initial position to their final (or destination) position. Nevertheless, it is possible to run the algorithm in parallel by using multiple layers at different heights. The criteria for the layer choice are left to the U-Space service provider and can be very varied (UAV heading, priority, maneuverability, airspace congestion...). The only requirement is that a UAV must participate in the conflict management of the layers below the deployment one during vertical takeoff and landing.
Before going into detail, we will introduce some starting definitions and assumptions.
3.1. UAV Dynamic Model
A comprehensive model of the dynamic behavior of a quadcopter-type UAV can be found in previous work [
27]. In the present paper, it is sufficient to apply the simplified 2D model described below.
Let
be the dynamic state of a UAV, where vectors
and
, represent its current position and velocity, respectively. Let
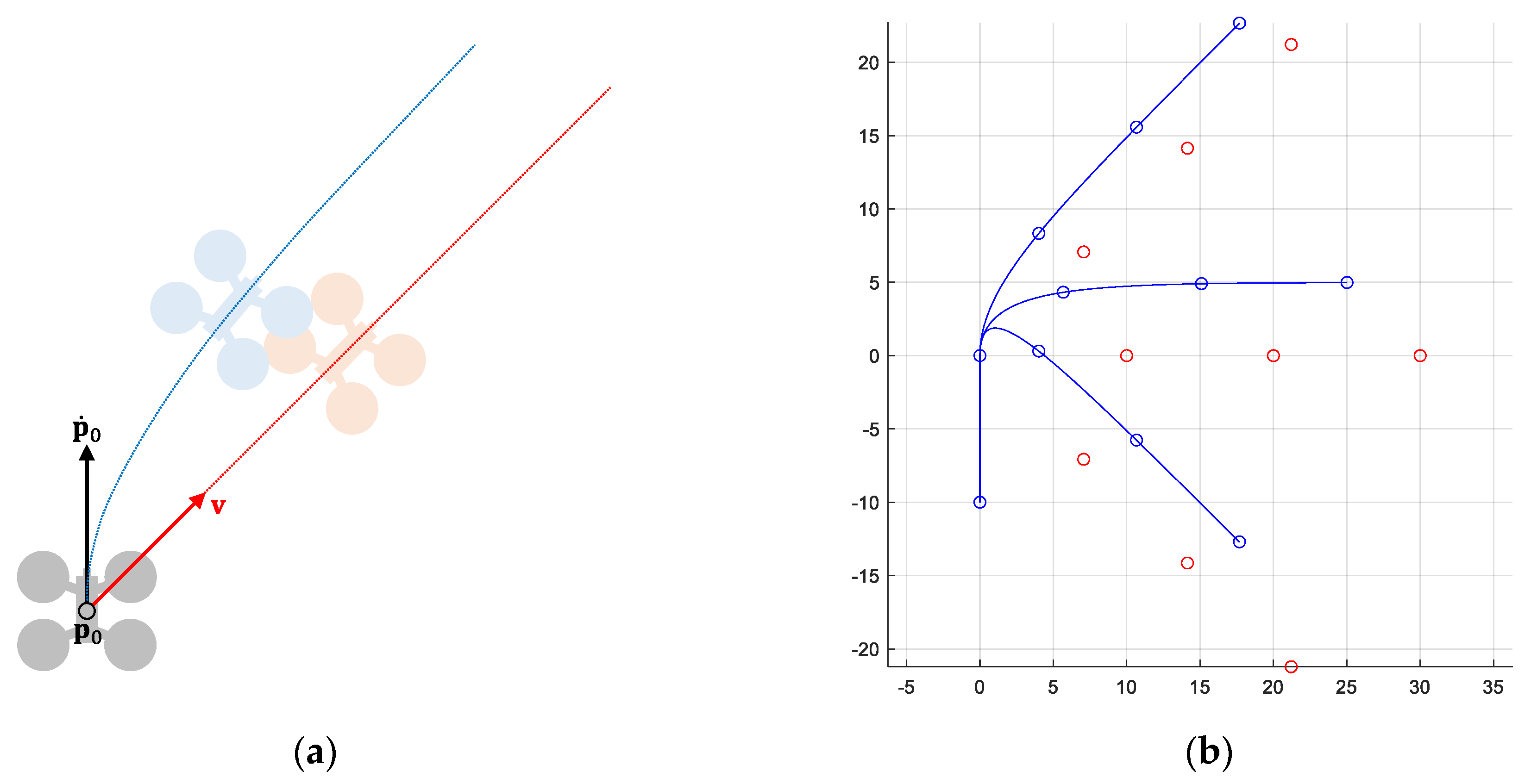
be the commanded (or desired) velocity for that UAV. Then, its dynamic behavior is modeled by the following first order system:
, being
the response time of the system (time employed to achieve the 63% of the desired value). Note that, the first-order system applies to the velocity of the UAV. However, due to it has been described with respect to its position, a second-order derivative appears.
Figure 1 shows an example.
Under these conditions, the position error experienced by the UAV due to the delay in following the commanded velocity is . The maximum error would occur in a scenario with both vectors at maximum speed and opposite direction: . As we will see later, the conflict detection mechanism will consider the error due to the dynamic behavior of the UAVs, consequently increasing their safety radius.
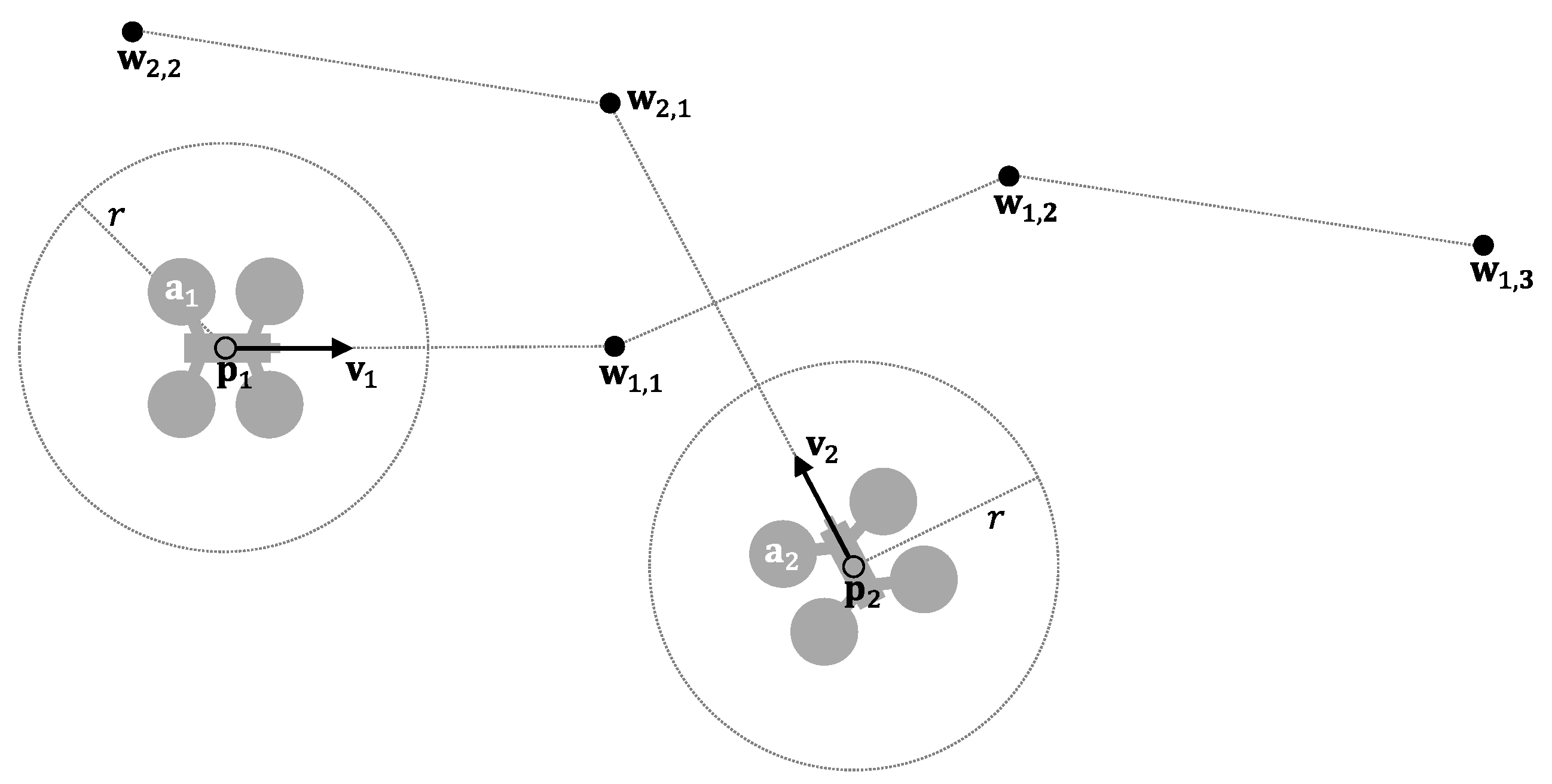
Let be the set of aircraft in the airspace at time t. Each element represents the status vector of a UAV, including its dynamic behavior and a route composed of several waypoints to its destination. Let be an ordered sequence of waypoints .
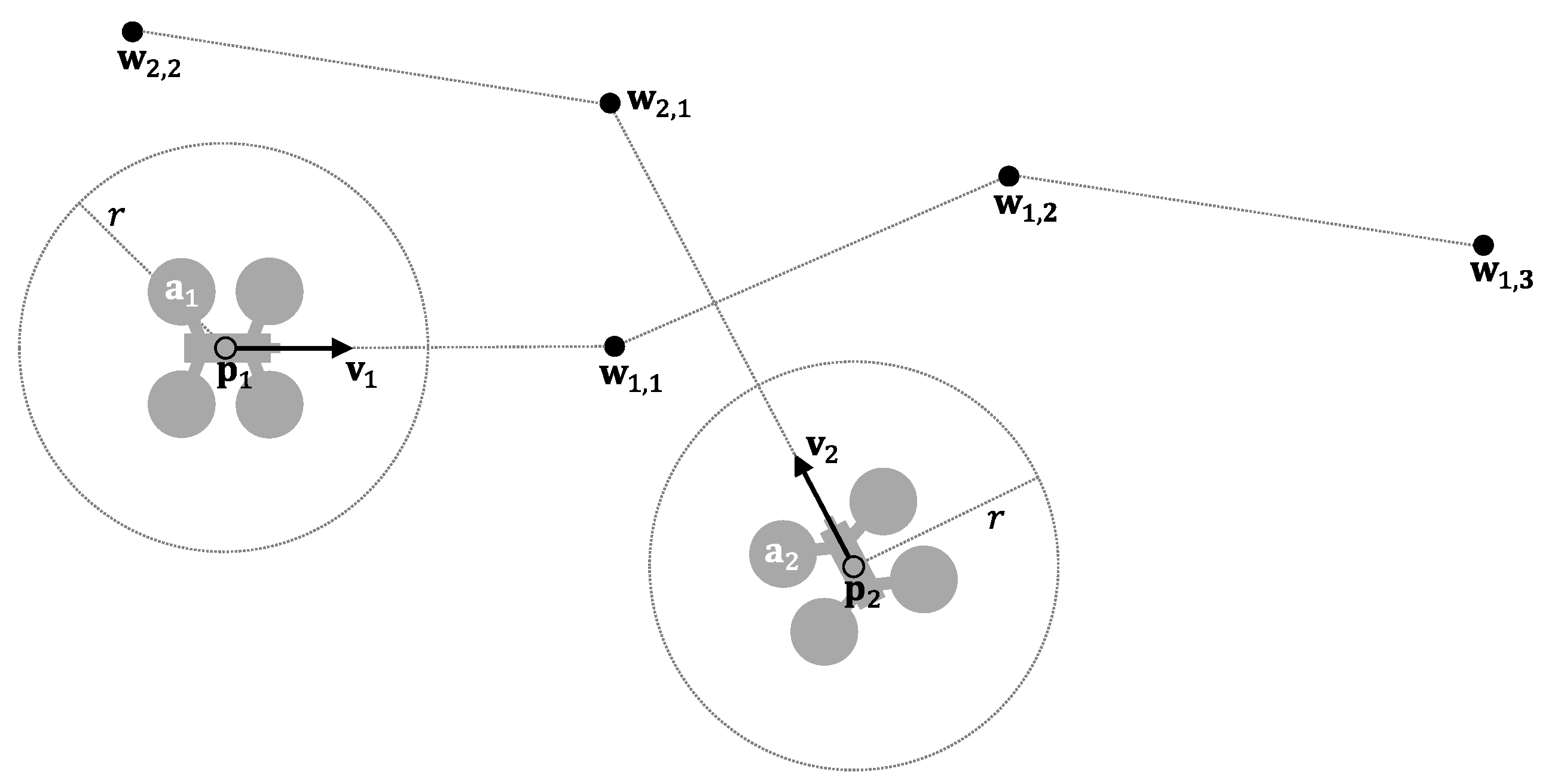
Without loss of generality, we assume that all UAVs behave homogeneously, initially flying at a predetermined maximum velocity
and they are considering a safety radius
(which delimits their “protected zone”).
Figure 2 shows an example.
With this definition, the optimal behavior for each UAV in ideal airspace (without restrictions due, for example, to the presence of buildings or no-fly zones) would be to fly in a straight line towards the next waypoint in its route, at a velocity
(what we have called the direct method).
Table 1 shows the implementation of this navigation system, which is executed periodically. If the UAV would reach the current waypoint before the next execution (02), it switches to the next waypoint in route (03–04). If multiple UAVs behave in this way in the same airspace, they may collide in flight.
From now on, the expression “navigation computation” refers to the operation consisting in assigning to each UAV in the airspace a velocity with which it must move in order not to cause any conflict. A “valid velocity” for a UAV is a velocity that does not produce any conflict between it and the rest of the UAVs in the airspace. “Final velocity” is the valid velocity that each UAV will use to move after the execution of the navigation computation.
UAV movement through airspace occurs in given units of time (e.g., seconds). We assume that all displacements start simultaneously, but not all of them end at the same time. This will depend on the initial and final positions of the UAVs, their velocities during the travel, and the route they take. Navigation computation also occurs in units of time, with the same unit as UAV movement. We assume that navigation is executed every units of travel. We call this parameter . In other words, defines how many time units a UAV can travel with the same navigation computation.
3.2. Conflict Prediction Mechanism
In this subsection, we will first detail a mechanism to check for the occurrence of a future conflict between two UAVs. From this, we will describe how to predict whether a given UAV will be involved in a conflict with any other UAV present in the airspace.
If we assume that a UAV
maintains its velocity constant, then its position at a future time
(relative to the current time) is provided by Equation (1):
Two UAVs,
and
, present a conflict if
. The system of equations shown in Equation (2) allows us to determine the existence of a conflict between them, obtaining the instants and positions of its beginning and end.
By solving this system, we obtain the expression shown in Equation (3):
which results in a second-degree equation as a function of
. After being solved, several situations may occur:
No real root is obtained. This means that the protected zones of both UAVs do not contact at any time. No conflict situation arises and, therefore, there are not potential collisions.
A real root is obtained. This means that the protected zones of both UAVs contact each other without overlapping, which does not generate a conflict situation either.
Two real roots, and are obtained. These values indicate the instants of the beginning and end of the conflict. During this time interval, the protected zones of both UAVs are partially overlapped. If both roots are positive, the conflict is predicted in the future. If only one root is negative, and are currently in a conflict situation. Finally, if both roots are negative, the conflict was resolved in the past, or it never occurred (the navigation algorithm prevented it).
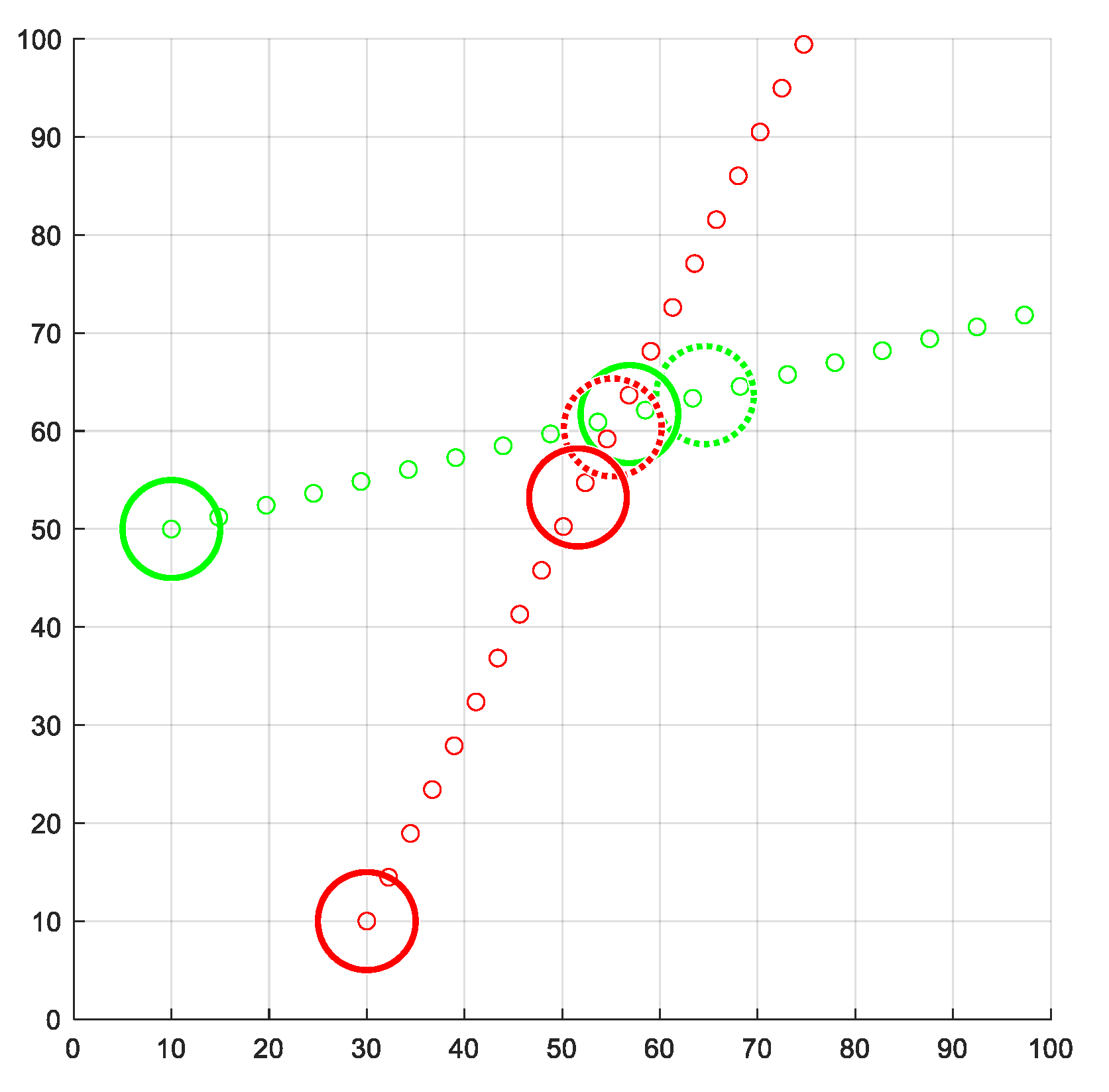
As an example,
Figure 3 shows two UAVs whose trajectories lead to a conflict in the future.
Table 2 presents the implementation of the conflict prediction operation between two UAVs. If the
ConflictPrediction function is given a velocity, the prediction is performed using this value (lines 04–06). Otherwise, the velocity previously assigned to the UAV will be used (03). We will use this function later to check whether a velocity is suitable for resolving a conflict before assigning it to a UAV. Then, the system of equations is implemented in the variable
(07–09) and its roots are computed (10). If any real root results (11),
will be the smallest of them (12). If no real root exists,
would be assigned to
(14).
To predict whether a particular UAV will be involved in a conflict, we can use the conflict prediction operation just described (see
Table 2), using as arguments the UAV under study and the rest of the UAVs present in the airspace. This check can be implemented through a loop, which will be interrupted as soon as the first conflict is detected, to replace the velocity of the UAV analyzed by a new valid velocity. If, on the other hand, this loop concludes without detecting any conflict, the current UAV velocity will be replaced by the direct velocity to the destination. We will discuss all this in more depth in later subsections.
Table 3 implements this behavior using a Boolean function. The main loop (01–08) checks if there is a conflict between each pair of UAVs (05). If so, a
true value is immediately returned (06). Obviously, we must omit this check for the current UAV (02–04). If, after considering all the UAVs in the airspace, no conflict has been found, a
false value is provided (09), indicating that there is no conflict with the UAV under study.
3.3. Valid Velocity Computation
After predicting a conflict, PCAN replaces the direct velocity of the UAV concerned by a new one that guarantees that no conflicts will occur. Each UAV must have a final velocity before moving during the following time units, which guarantees that it will not collide with any other UAV in the airspace before the next execution of the navigation computation.
A set of candidate velocities “close” to the direct velocity are generated to obtain this final velocity, and these new velocities are checked for conflicts. Suppose any of them manages to resolve all the conflicts between the UAV under study and the rest of the UAVs in the airspace. In that case, this velocity will be a valid velocity, and it will be taken as the final velocity for the UAV. If none of these velocities leads to a conflict-free scenario, the algorithm proceeds to generate a new set of candidate velocity vectors. This process continues until a final velocity is found or a preset limit of iterations is exceeded. If, after exhausting all iterations and discarding all candidate velocity vectors, any valid velocity has been obtained, a decision is made to assign the UAV a zero velocity (assuming it is a rotary-wing UAV). This is done because, in this case, the airspace is very crowded, and no velocity in any direction would allow the UAV to proceed while guaranteeing a conflict-free scenario without increasing the time or distance traveled too much. The UAV should stop moving forward to leave its path clear for other UAVs to move in this situation.
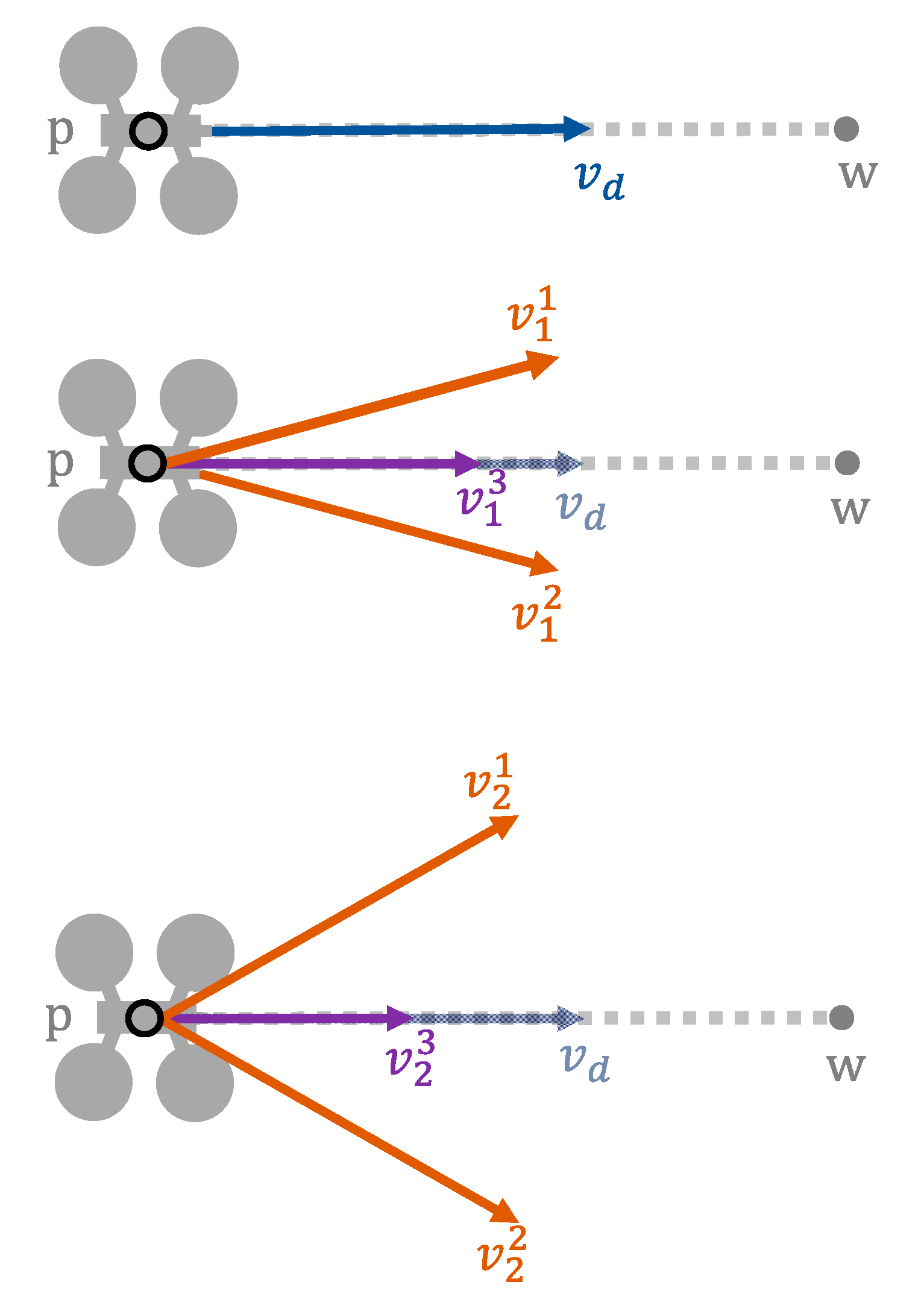
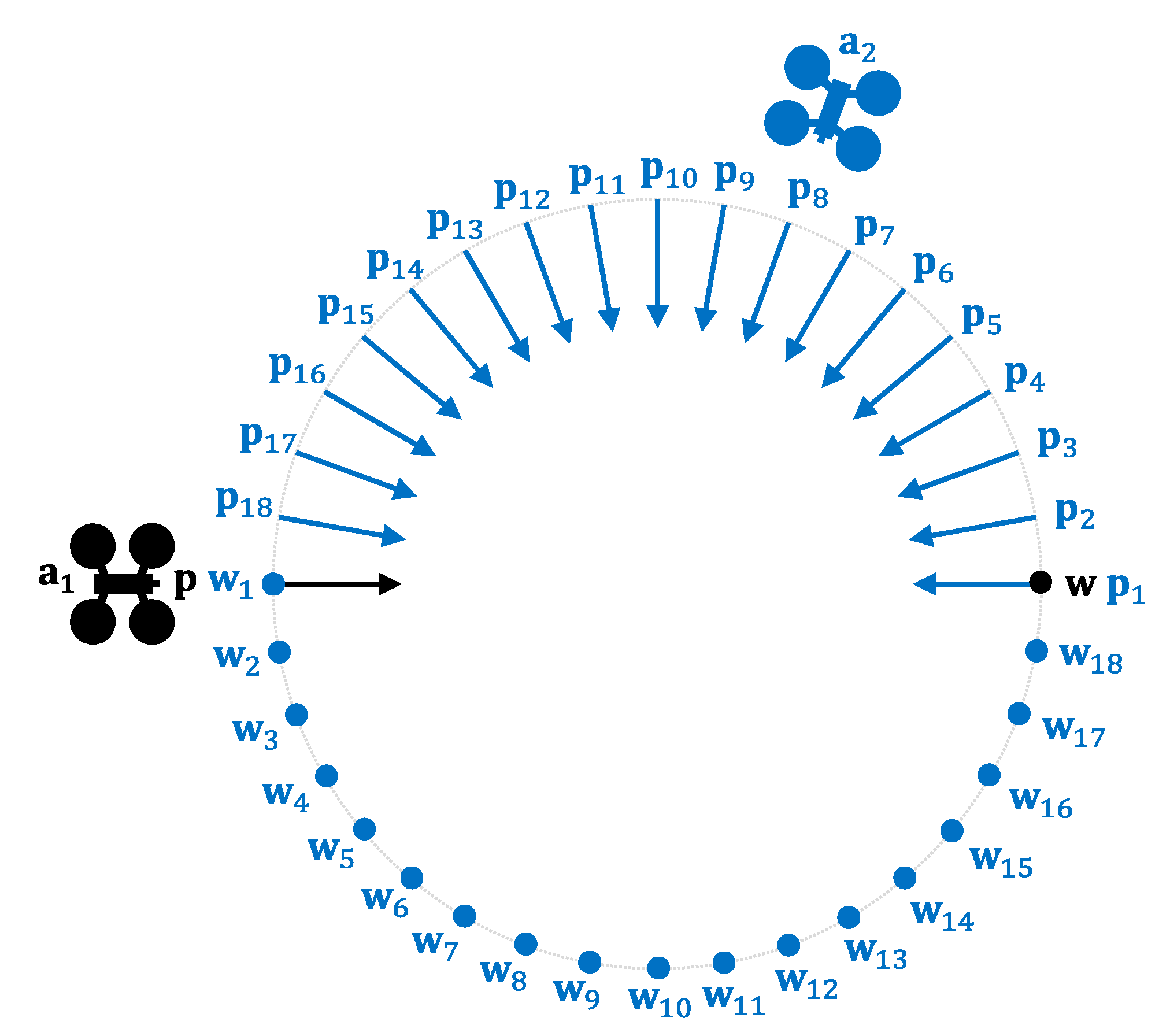
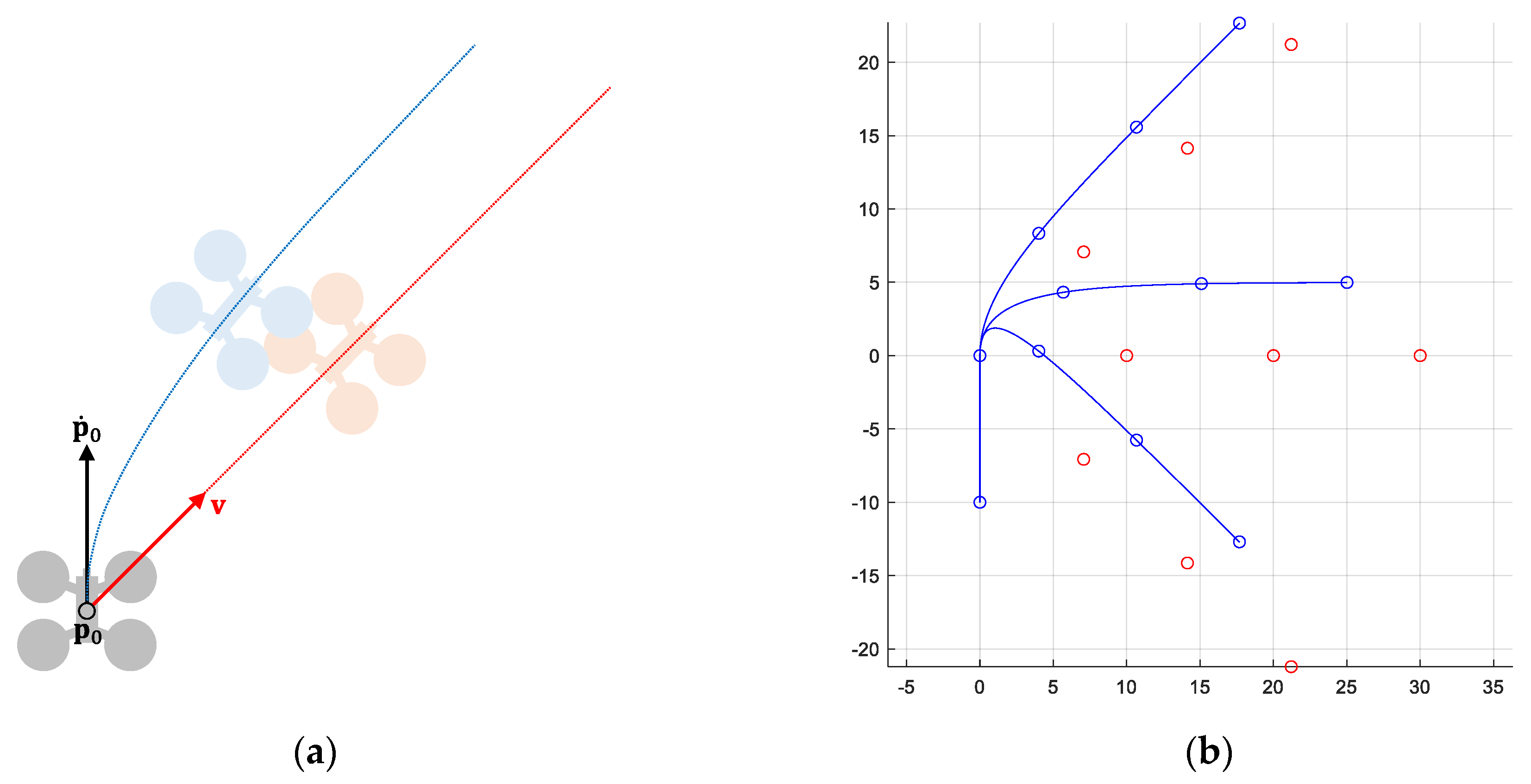
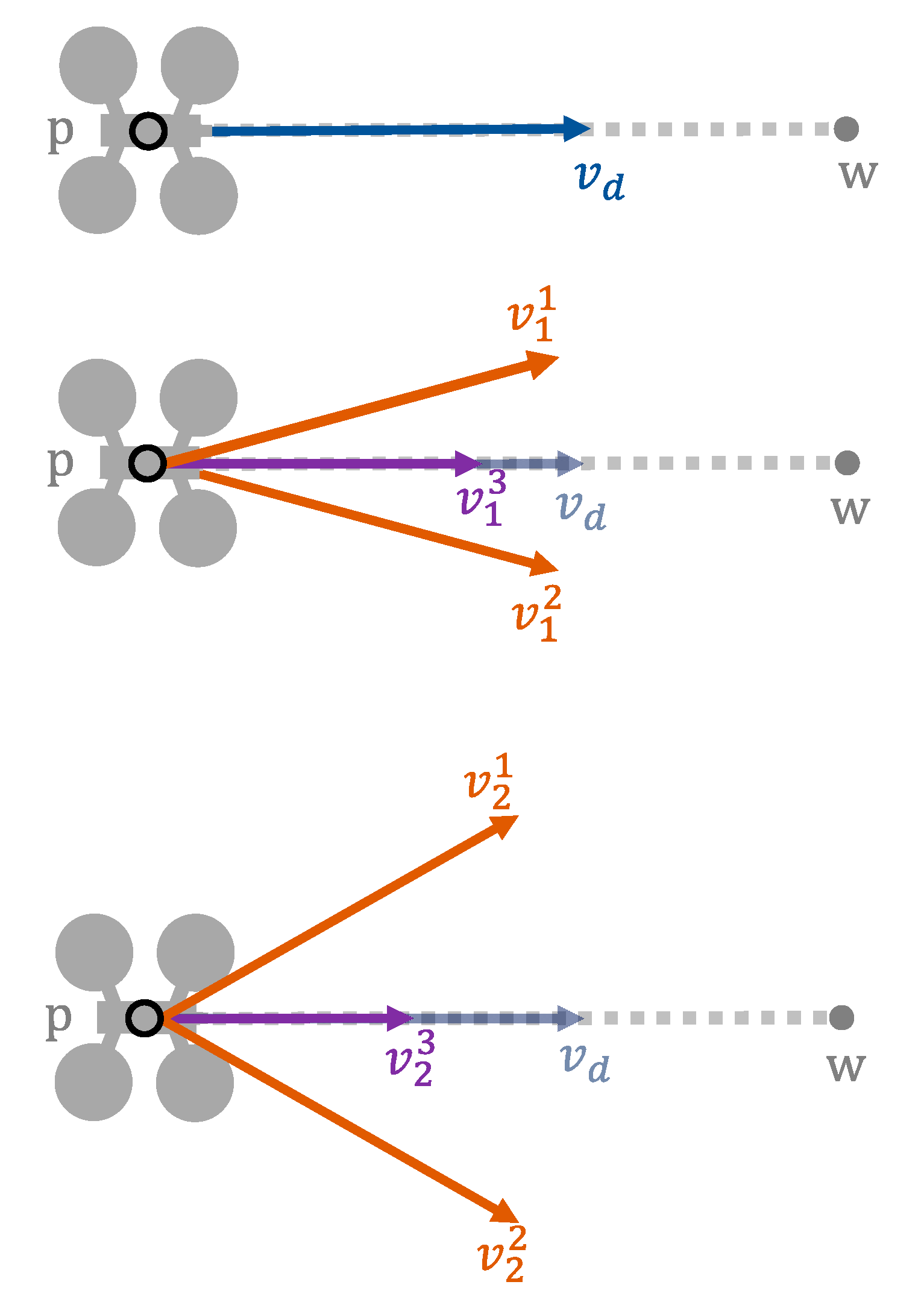
To generate all these candidate velocities, a loop can be used that generates new velocities from the previous ones. In its first iteration, velocities generated are based on the direct one (). In each iteration, three candidate velocities are generated. One of these velocities will have the same direction as the previous one but a lower modulus. The other two velocities will have a different direction but the same modulus. Through the parameter, we can set how much the velocity is reduced when we are varying its modulus. In the same way, through the parameter (angular displacement), we can control how much the direction will vary when we are obtaining two new velocities with different directions. These two velocities will have the same amount of direction variation, but one will be varied clockwise and the other counterclockwise.
We can see an example in
Figure 4. As stated, the iterative process starts with
. The three new candidate velocities generated in iteration
are called
, where
distinguishes between them. In the figure, we can see that
and
(orange color) present the same angular displacement with respect to
, but in different directions. On the other hand,
, which is the modified velocity in modulus, follows the direction of
. If none of these three candidate velocities were valid, we would proceed to generate new ones (
), following the same methodology, but this time starting from the velocities generated in the previous loop iteration.
Table 4 provides the function that generates valid velocities for a UAV. As described above, three different velocities will be evaluated, which are initialized using the direct velocity (02). The computation is enclosed in a loop (03–17), which iterates until a valid velocity is found or a predetermined maximum number of iterations (
) is reached. At each iteration, three modified velocities are obtained from the previous velocity vector. We use the
parameter (a value less than
) to modify the modulus of the velocity vector (04). The change in direction is performed by the
Veer function (05–06), described below. These three candidate velocities are then checked for conflicts (07, 10, 13). If any of them did not cause any conflict, the corresponding velocity vector is returned (08, 11, 14). If the loop concludes without finding any valid velocity, a null velocity is provided (18).
Table 5 details the behavior of the
Veer function. The
argument is the velocity vector to vary. The
argument defines the angular displacement between iterations (expressed in radians). In our study, this value has been assigned to the maximum allowed angular displacement divided by the maximum number of iterations (
). The
direction argument admits the values
and
, and represents the direction of the angular displacement (01–03). In (04), a new velocity vector with an angular displacement in a counterclockwise or clockwise direction, respectively, is obtained.
3.4. Navigation Computation. The PCAN Algorithm
We have seen the above two mechanisms to predict a conflict between a UAV and the rest of the UAVs in the airspace and provide a new valid velocity for a UAV in that situation. This subsection will describe the general mechanism to compute the final velocity for all the UAVs in the airspace (what we have called navigation computation).
Table 6 details the general behavior of the PCAN algorithm. First, all UAVs are assigned direct velocity to the destination (02–06). Then, for each UAV we check if it produces any conflict with the airspace (08). If there are no conflicts, we assign the direct velocity as the final velocity for the considered UAV (15). However, if a conflict is predicted, a valid velocity is computed for that UAV (09).
If the ValidVelocity function returns a null velocity (10), we must recalculate the final velocities for the previously processed UAVs (11). If the velocity is not null, we assign the obtained velocity as the final velocity for the UAV (15).
It is important to clarify that the process must be carried out in sequence, processing one UAV after another until all of them have a final velocity. When a UAV is about to calculate its final velocity, conflict prediction will be made using the final velocities of the UAVs that already have calculated their final velocity and the direct velocities of the UAVs that have not been processed yet. In the case of the first UAV processed, conflict prediction will be made from the direct velocities of the rest of the UAVs, while the last UAV processed will perform the prediction from the final velocities of the rest of the UAVs in the airspace. Since a final velocity for a UAV will only be accepted if it does not lead to a conflict with any other UAV, the order in which the final velocities are obtained will affect the solution for each of the UAVs. The UAV whose final velocity is calculated first will have to fight more conflicts than the last UAV processed, which will not have to fight any conflict, since the previous UAVs treated have already prevented the conflict with it.
For this work, the order in which the UAVs are processed is given by their number within the airspace (ordinal within the set). This implies a priority which, although not chosen, is necessary since there must be an order. However, as future work, we plan to implement a priority system based, for example, on UAV categories (as established by U-space), on the urgency of the service provided, or on any other criteria. In this way, those UAVs with higher priority will minimally modify the optimal trajectory offered by the direct method, while those UAVs with lower priority will have to avoid a greater number of conflicts, obtaining for them a solution farther away from the optimal one.
Finally, note that assigning a null velocity to a UAV implies a higher computational cost because it invalidates the final velocities of UAVs that have been processed before it. By assigning a null velocity, the prediction made by another UAV for which the final velocity was already calculated is invalidated and must be performed again. This process only occurs in really crowded airspaces.
3.5. Airspace Bounding
As mentioned before, valid velocities are generated from the airspace state. However, in airspaces with a high density of UAVs, which is expected to happen in UAM scenarios, the computational cost of calculating these valid velocities increases. Moreover, considering UAVs far enough away from a given UAV not to cause a conflict with it in the short term does not make sense and leads to worse solutions. For this reason, an immediate improvement of PCAN would consist of analyzing only the portion of the airspace containing those UAVs that could collide with the UAV understudy before the next execution of the navigation computation.
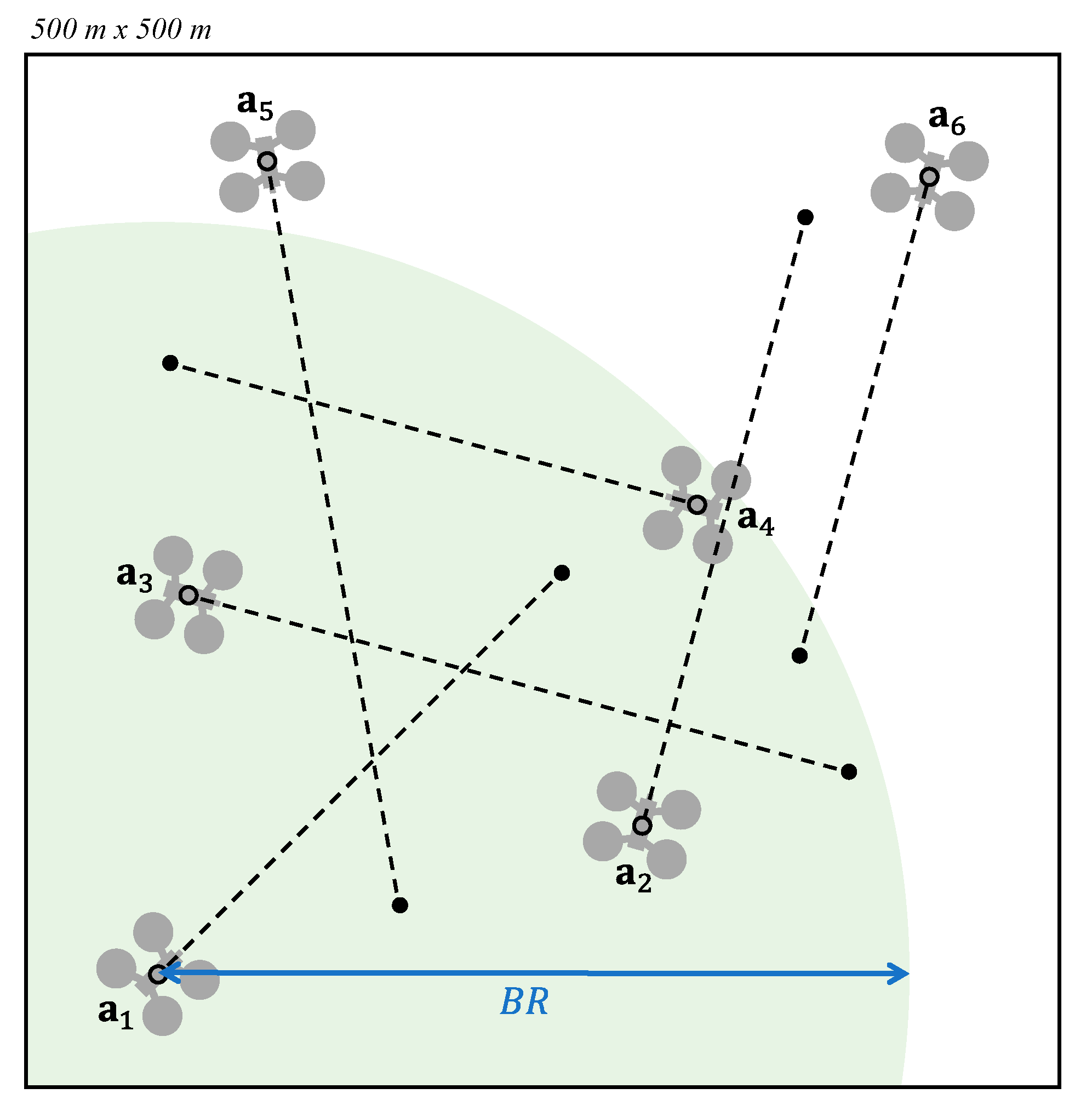
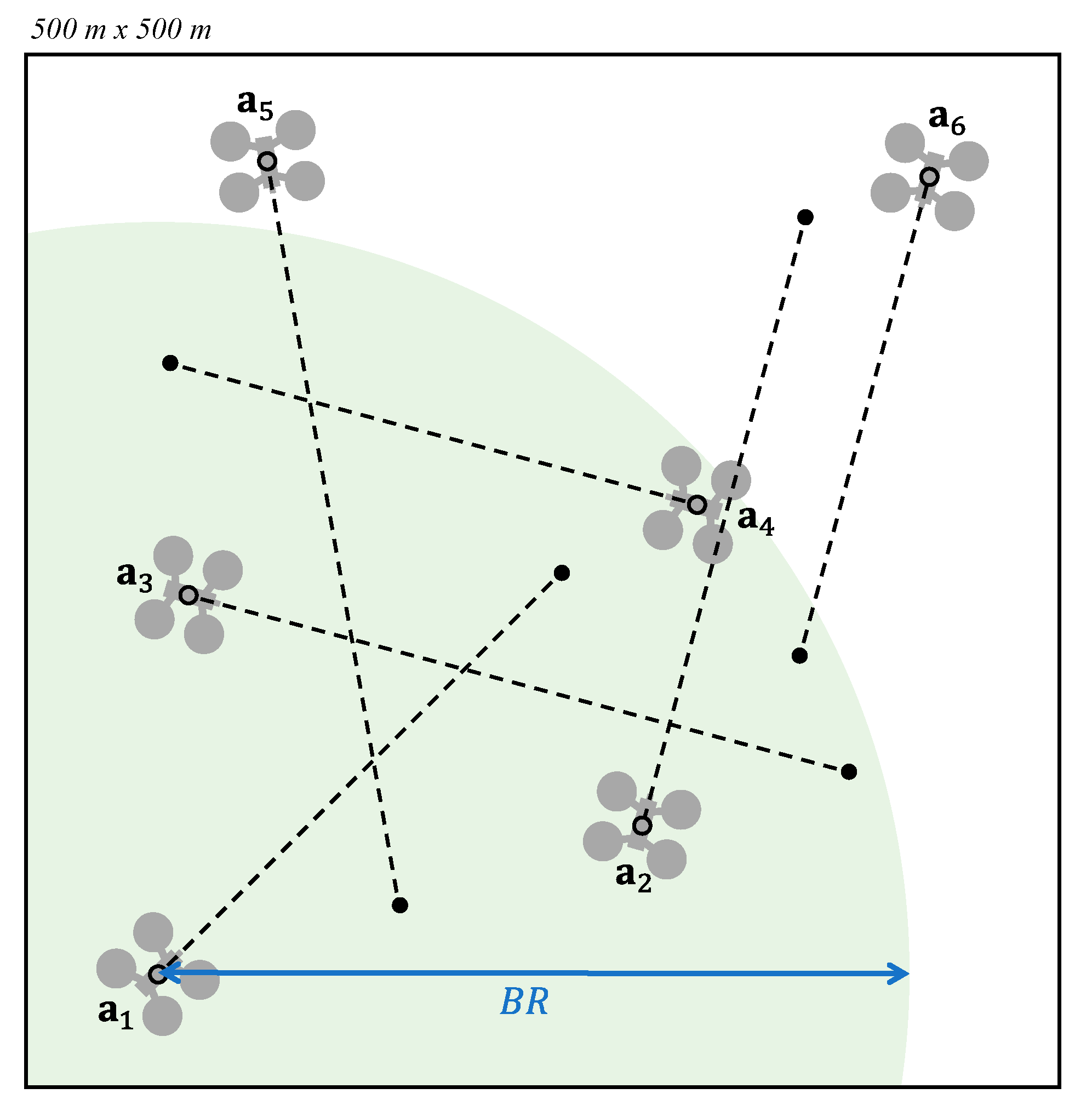
In short, we define a boundary radius (
), establishing a circular region around the UAV so that only the UAVs inside that area will be considered for the calculation of the valid velocity. This radius should be greater than the threshold (
) defined by the worst possible situation, consisting of two UAVs flying in opposite directions, according to:
Figure 5 shows an example. Given the airspace
, we proceed to calculate a valid velocity for
. Consequently, only the UAVs within the circular region defined by
, plotted in green, are considered for the valid velocity calculation. Thus,
and
do not influence the final velocity of
.









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}