High Repetition Rate Mid-Infrared Differential Absorption Lidar for Atmospheric Pollution Detection



Abstract
1. Introduction
2. DIAL Theory
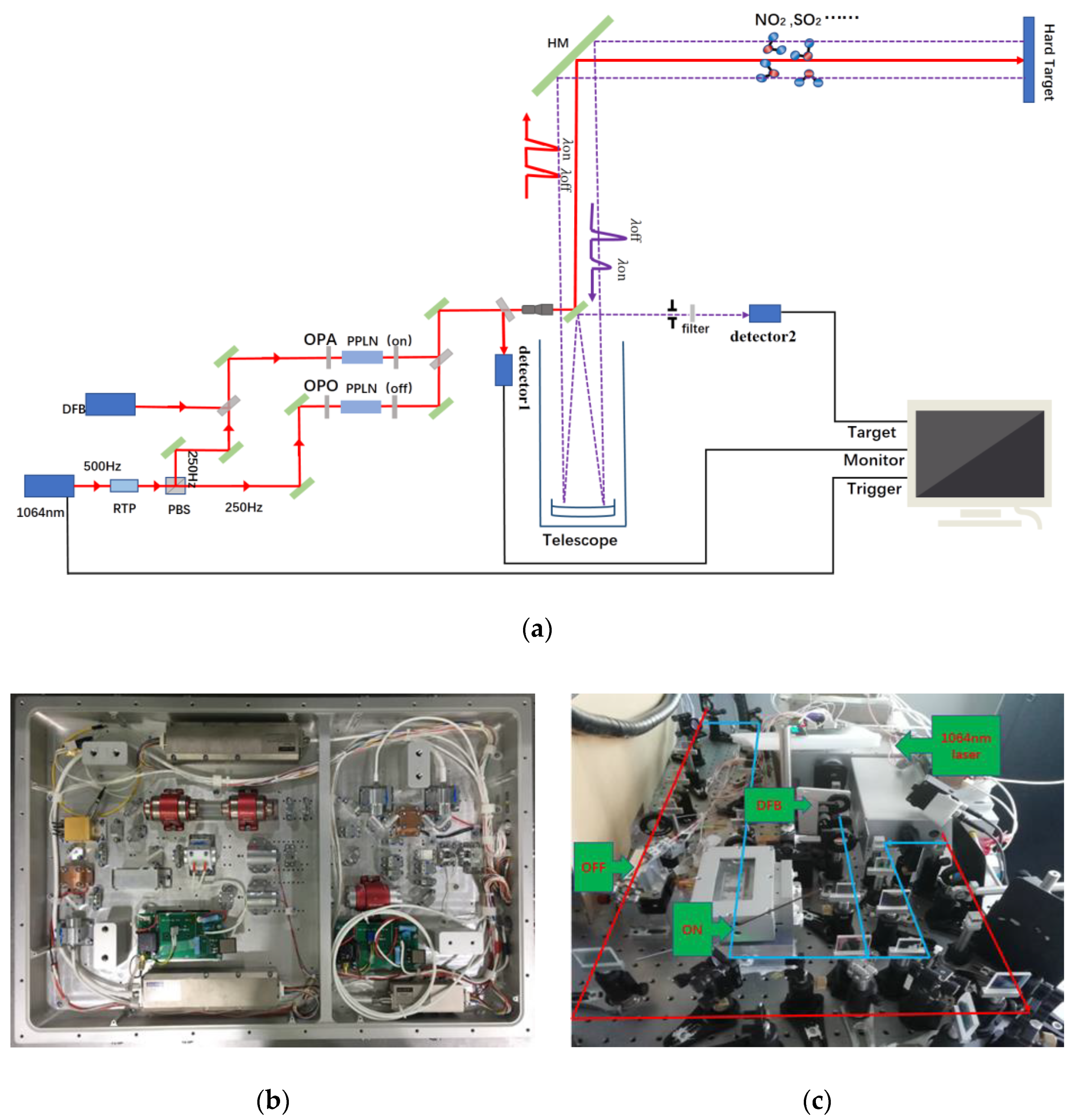
3. DIAL System Description
4. DIAL Detection Experiments and Results
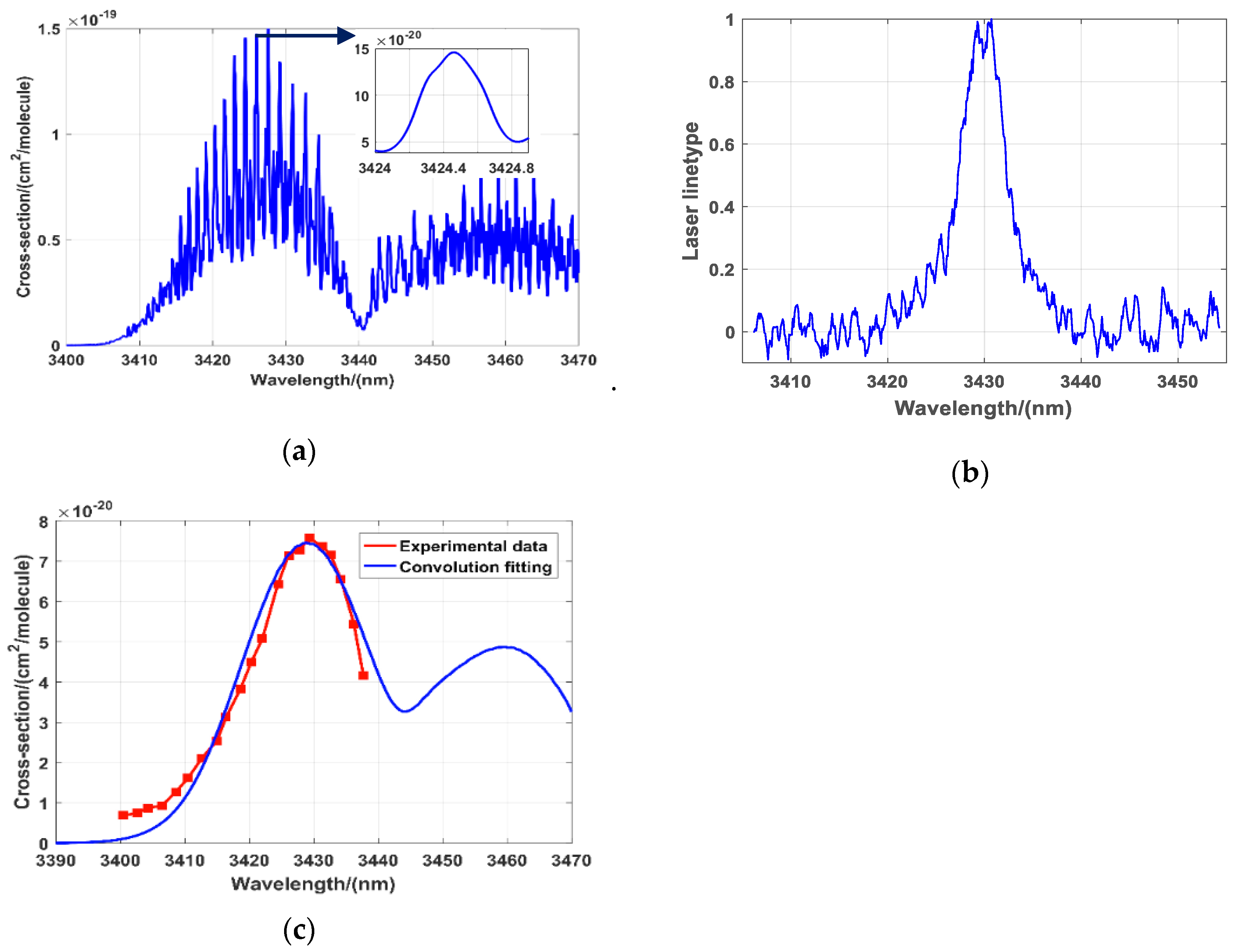
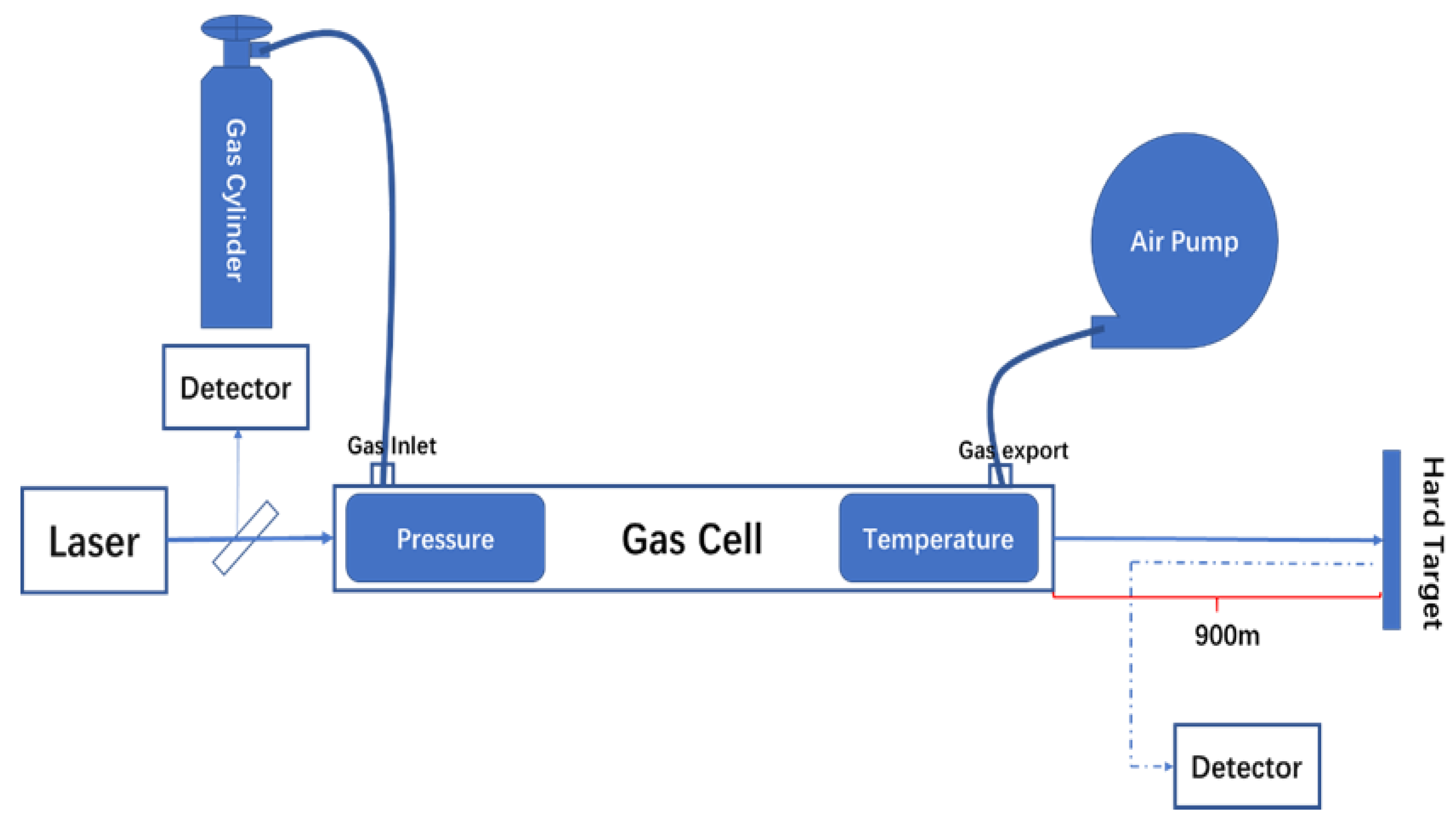
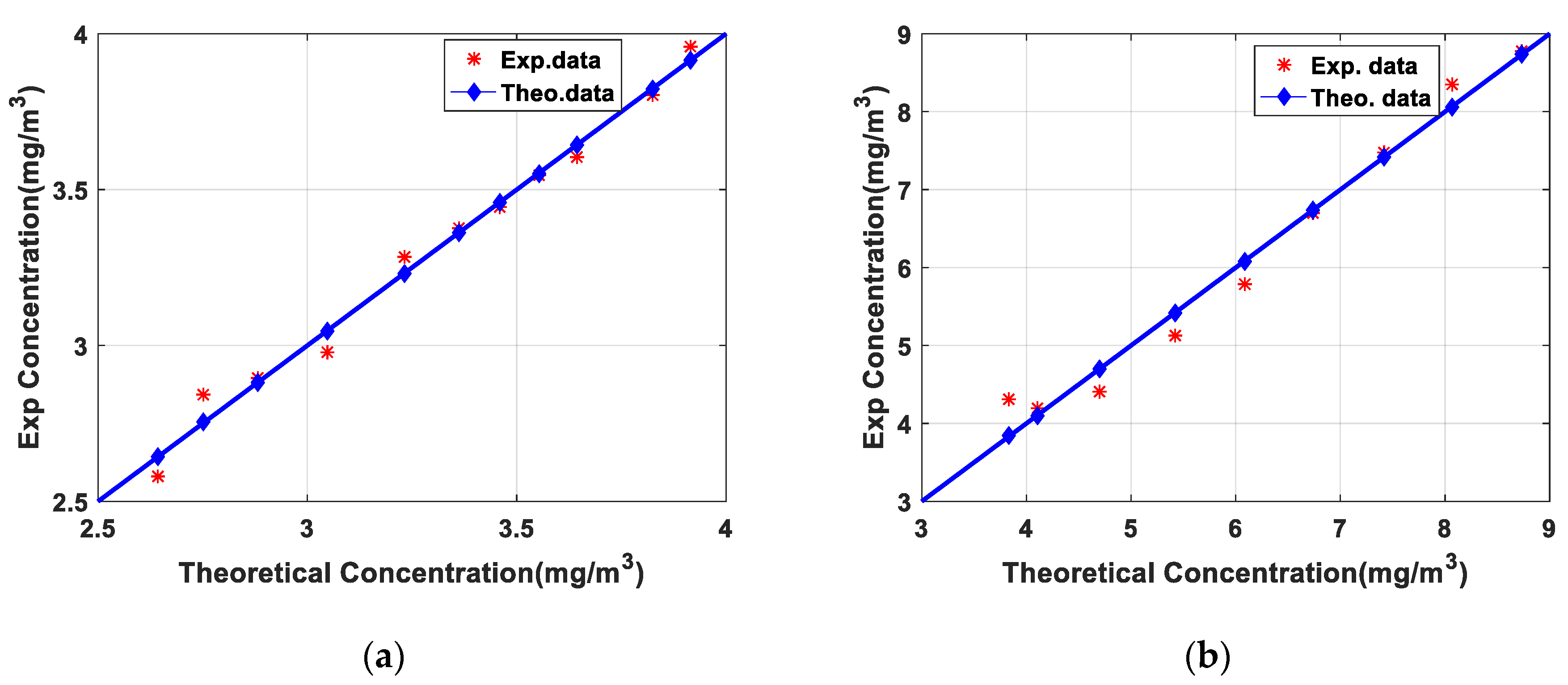
4.1. Calibration Experiment of DIAL
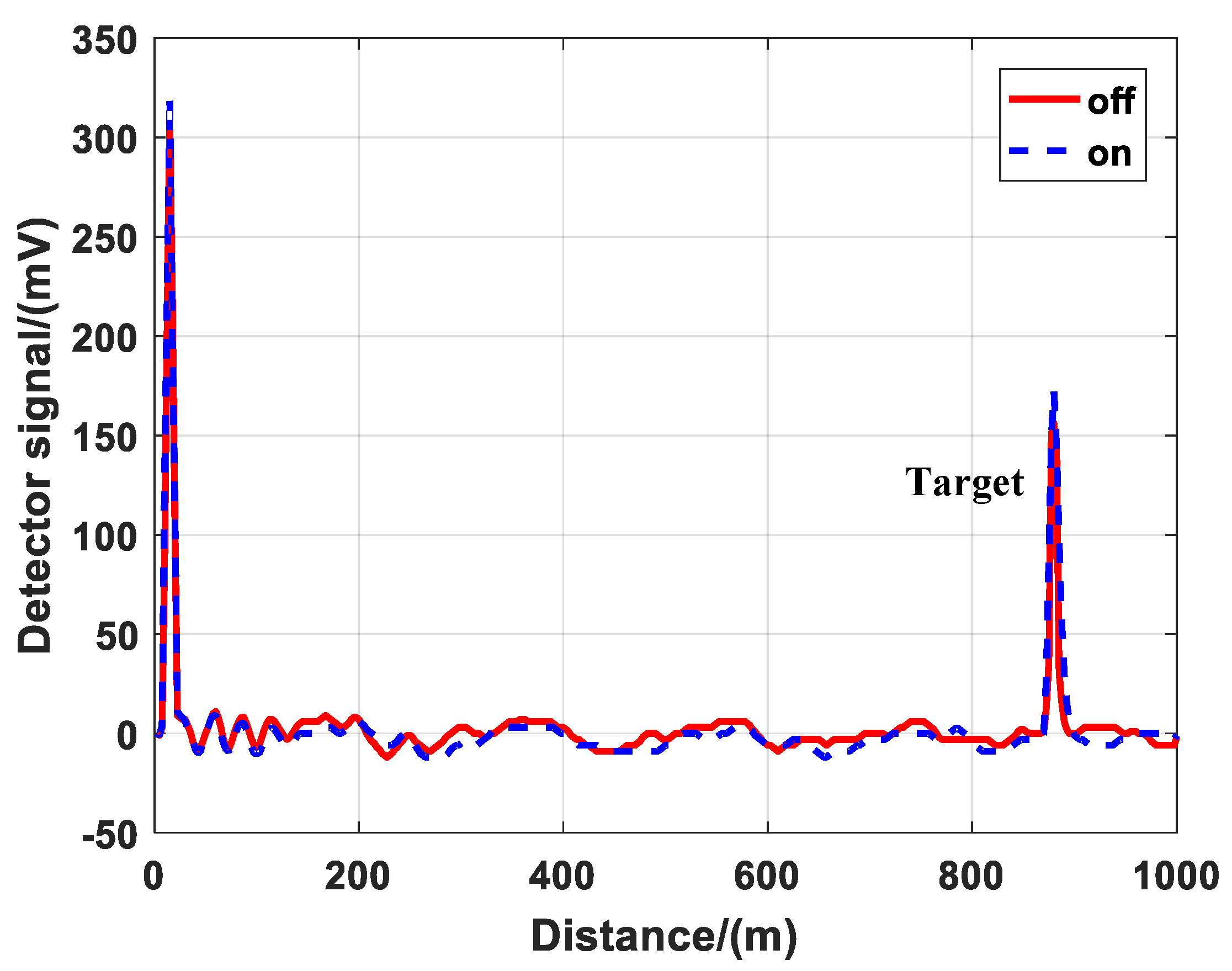
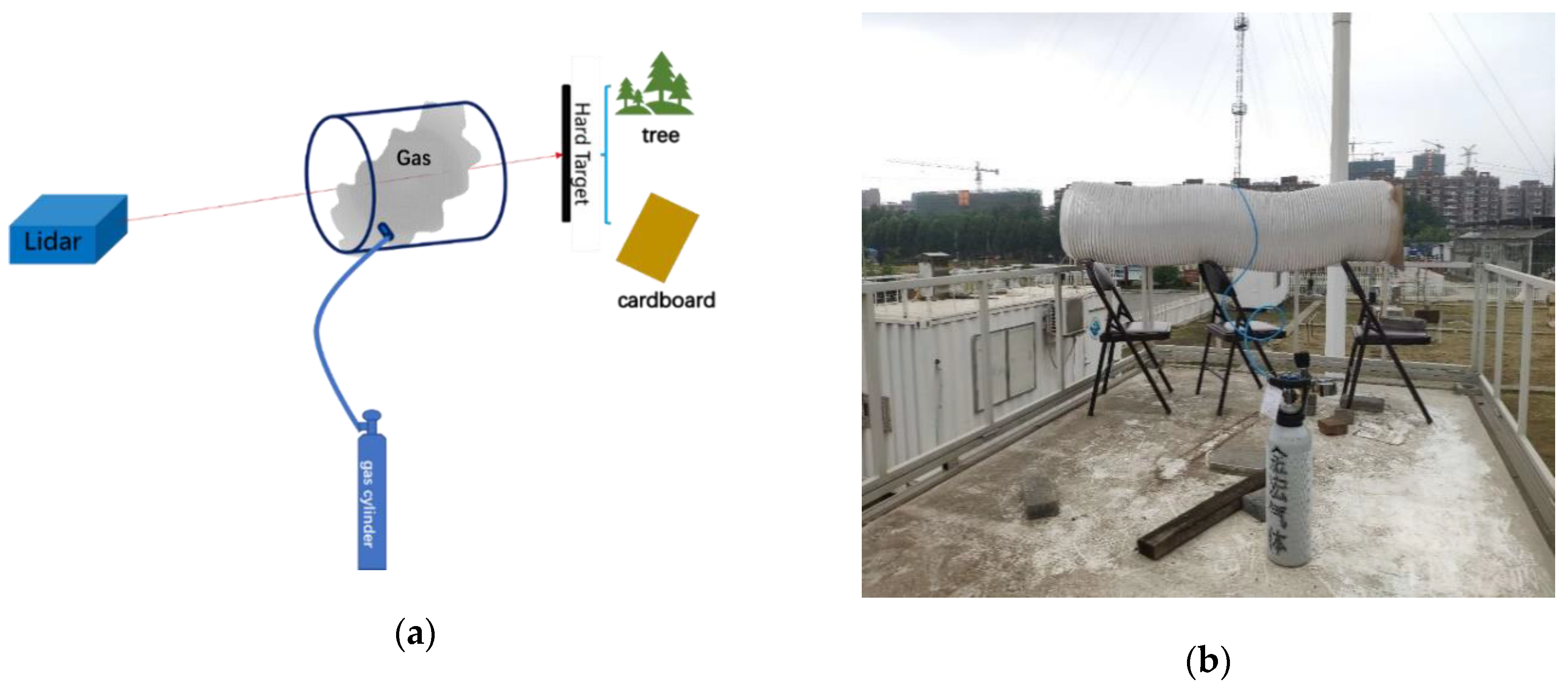
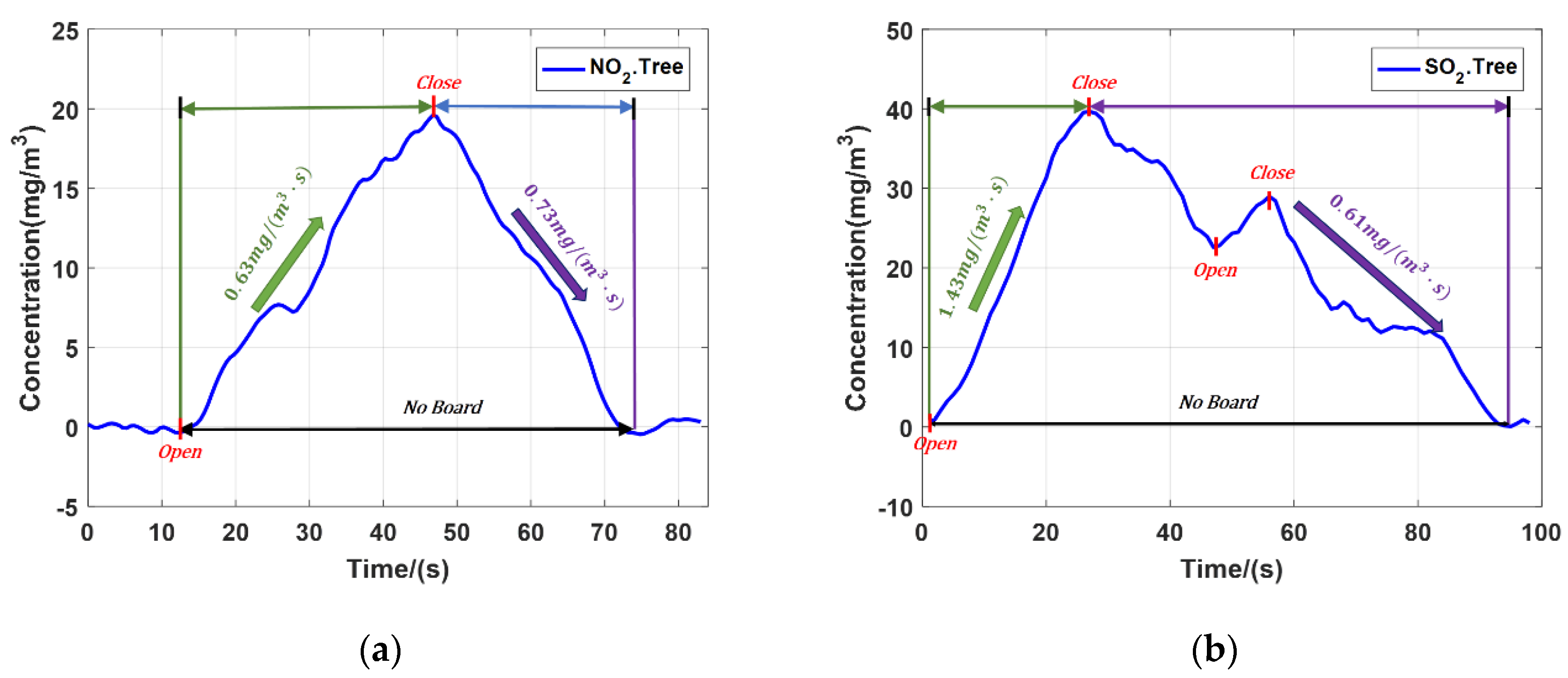
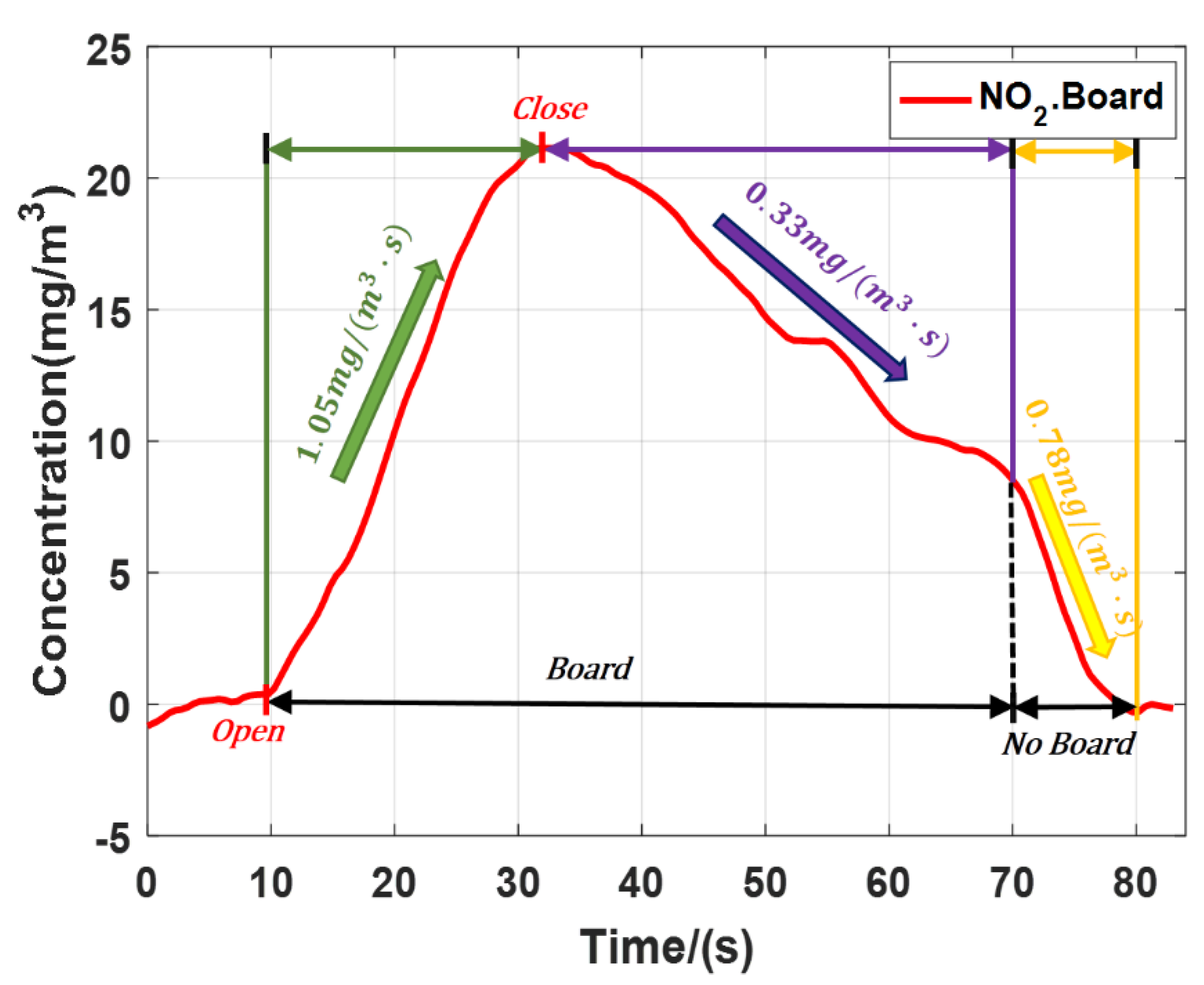
4.2. Open Field Observation of DIAL
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Rossi, R.; Ciparisse, J.F.; Gelfusa, M.; Malizia, M.; Gaudio, P. The project TELEMACO: Detection, identification and concentration measurements of hazardous chemical agents. J. Instrum. 2019, 14, C03004. [Google Scholar] [CrossRef]
- Vale, A.; Bradberry, S.; Rice, P.; Marrs, T.C. Chemical warfare and terrorism. Medicine 2003, 31, 26–29. [Google Scholar] [CrossRef]
- Moore, B.L.; Geller, R.J.; Clark, C. Toxic industrial chemicals and chemical weapons: Exposure, identification, and management by syndrome. Emerg. Med. Clin. N. Am. 2015, 33, 13–36. [Google Scholar]
- Axelsson, H.; Edner, H.; Galle, B.; Ragnarson, P.; Mats, R. Differential optical absorption spectroscopy (DOAS) measurements of ozone in the 280–290 nm wavelength region. Appl. Spectrosc. 1990, 44, 1654–1658. [Google Scholar] [CrossRef]
- Innocenti, F.; Robinson, R.; Gardiner, T.; Finlayson, A.; Connor, A. Differential Absorption Lidar (DIAL) measurements of landfill methane emissions. Remote Sens. 2017, 9, 953. [Google Scholar] [CrossRef]
- Weibring, P.; Edner, H.; Svanberg, S. Versatile mobile lidar system for environmental monitoring. Appl. Opt. 2003, 42, 3583–3594. [Google Scholar] [CrossRef]
- Repasky, K.S.; Moen, D.; Spuler, S.; Nehrir, A.R.; Carlsten, J.L. Progress towards an autonomous field deployable diode-laser-based differential absorption lidar (DIAL) for profiling water vapor in the lower troposphere. Remote Sens. 2013, 5, 6241–6259. [Google Scholar] [CrossRef]
- Xiang, C.; Han, G.; Zheng, Y.; Ma, X.; Gong, W. Improvement of CO2-DIAL signal-to-noise ratio using lifting wavelet transform. Sensors 2018, 18, 2362. [Google Scholar] [CrossRef]
- Sa, R.; Bu, L.; Wang, Q.; Zhou, J. Spectral characteristics of polluted gases and their detection by mid-infrared differential absorption lidar. Opt. Int. J. Light Electron Opt. 2017. [Google Scholar] [CrossRef]
- Saito, Y.; Bring, P.W.; Edner, H.; Svanberg, F. Possibility of Hard-Target Lidar Detection of a Biogenic Volatile Organic Compound, nu-Pinene Gas, Over Forest Areas. Appl. Opt. 2001, 40, 3572–3574. [Google Scholar] [CrossRef]
- Mirov, S.B.; Fedorov, V.V.; Martyshkin, D.; Moskalev, I.S.; Mirov, M.; Vasilyev, S. Progress in Mid-IR lasers based on Cr and Fe-Doped II–VI chalcogenides. IEEE J. Sel. Top. Quantum Electron. 2014, 21, 292–310. [Google Scholar] [CrossRef]
- Veerabuthiran, S.; Razdan, A.K.; Jindal, M.K.; Prasad, G. Open field testing of mid IR DIAL for remote detection of thiodiglycol vapor plumes in the topographic target configuration. Sens. Actuators B Chem. 2019, 298, 126833. [Google Scholar] [CrossRef]
- Mammez, D.; Cadiou, E.; Dherbecourt, J.B.; Raybaut, M.; Melkonian, J.M.; Godard, A.; Lefebvre, M. Multispecies transmitter for DIAL sensing of atmospheric water vapour, methane and carbon dioxide in the 2 μm region. SPIE Remote Sens. Int. Soc. Opt. Photonics 2015. [Google Scholar] [CrossRef]
- Lambert-Girard, S.; Allard, M.; Piché, M.; Babin, F. Differential optical absorption spectroscopy lidar for mid-infrared gaseous measurements. Appl. Opt. 2015, 54, 1647. [Google Scholar] [CrossRef]
- Romanovskii, O.A.; Sadovnikov, S.A.; Kharchenko, O.V.; Yakovlev, S.V. Development of Near/Mid IR differential absorption OPO lidar system for sensing of atmospheric gases. Opt. Laser Technol. 2019, 116, 43–47. [Google Scholar] [CrossRef]
- Robinson, R.; Gardiner, T.; Innocenti, F.; Woods, P.; Coleman, M. Infrared differential absorption Lidar (DIAL) measurements of hydrocarbon emissions. J. Environ. Monit. 2011, 13, 2213–2220. [Google Scholar] [CrossRef]
- Veerabuthiran, S.; Razdan, A.K. LIDAR for detection of chemical and biological warfare agents. Def. Sci. J. 2011, 61, 241–250. [Google Scholar] [CrossRef]
- Han, G.; Xu, H.; Gong, W.; Liu, J.; Du, J.; Ma, X.; Liang, A. Feasibility study on measuring atmospheric CO2 in urban areas using spaceborne CO2-IPDA LIDAR. Remote Sens. 2018, 10, 985. [Google Scholar] [CrossRef]
- Xin, Y.J.; Dan, Z.Y.; Qin, W.; Bing, B.L.; Qiao, L.J.; Biao, C.W. Influence of surface reflectance and aerosol optical depth on performance of spaceborne integral path differential absorption Lidar. Chin. J. Lasers 2019, 46, 0910001. [Google Scholar]
- Gimmesead, G.G. Differential-absorption Lidar for ozone and industrial emissions. Lidar 2005, 102, 187–212. [Google Scholar]
- Refaat, T.F.; Singh, U.N.; Petros, M.; Remus, R.; Yu, G. Self-calibration and laser energy monitor validations for a double-pulsed 2-μm CO_2 integrated path differential absorption lidar application. Appl. Opt. 2015, 54, 7240–7251. [Google Scholar] [CrossRef] [PubMed]
- Xu, L.; Bu, L.B.; Cai, H.Z.; Sa, R.; Zhou, J. Wavelength selection and detection capability simulation of the mid-infrared DIAL for NO2 detecion. Infrared Laser Eng. 2018, 47, 1030002. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Typical Parameter | Value | |
|---|---|---|
| Wavelength | on/off(NO2) | 3424.5/3405 nm |
| on/off(SO2) | 3988.9/3940.0 nm | |
| on/off(NO) | 2657.4/2630.4 nm | |
| Pulse energy | 0.14 mJ/0.12 mJ | |
| Pulse duration | 20 ns | |
| Pulse Linewidth | 0.02 nm(on)/10 nm(off) | |
| Pulse rate (on/off) | 250 Hz/250 Hz | |
| Sampling rate | 60 MHz | |
| Sampling digit | 16 bit | |
| Detector bandwidth | 5 MHz | |
| Detector sensitivity | 6.5 × 104 V/W | |
| Detector spectral response range | 2.5–4.5 μm | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gong, Y.; Bu, L.; Yang, B.; Mustafa, F. High Repetition Rate Mid-Infrared Differential Absorption Lidar for Atmospheric Pollution Detection. Sensors 2020, 20, 2211. https://doi.org/10.3390/s20082211
Gong Y, Bu L, Yang B, Mustafa F. High Repetition Rate Mid-Infrared Differential Absorption Lidar for Atmospheric Pollution Detection. Sensors. 2020; 20(8):2211. https://doi.org/10.3390/s20082211
Chicago/Turabian StyleGong, Yu, Lingbing Bu, Bin Yang, and Farhan Mustafa. 2020. "High Repetition Rate Mid-Infrared Differential Absorption Lidar for Atmospheric Pollution Detection" Sensors 20, no. 8: 2211. https://doi.org/10.3390/s20082211
APA StyleGong, Y., Bu, L., Yang, B., & Mustafa, F. (2020). High Repetition Rate Mid-Infrared Differential Absorption Lidar for Atmospheric Pollution Detection. Sensors, 20(8), 2211. https://doi.org/10.3390/s20082211