Indoor Large-Scale MIMO-Based RSSI Localization with Low-Complexity RFID Infrastructure

 , , and
, , and 
Abstract
1. Introduction
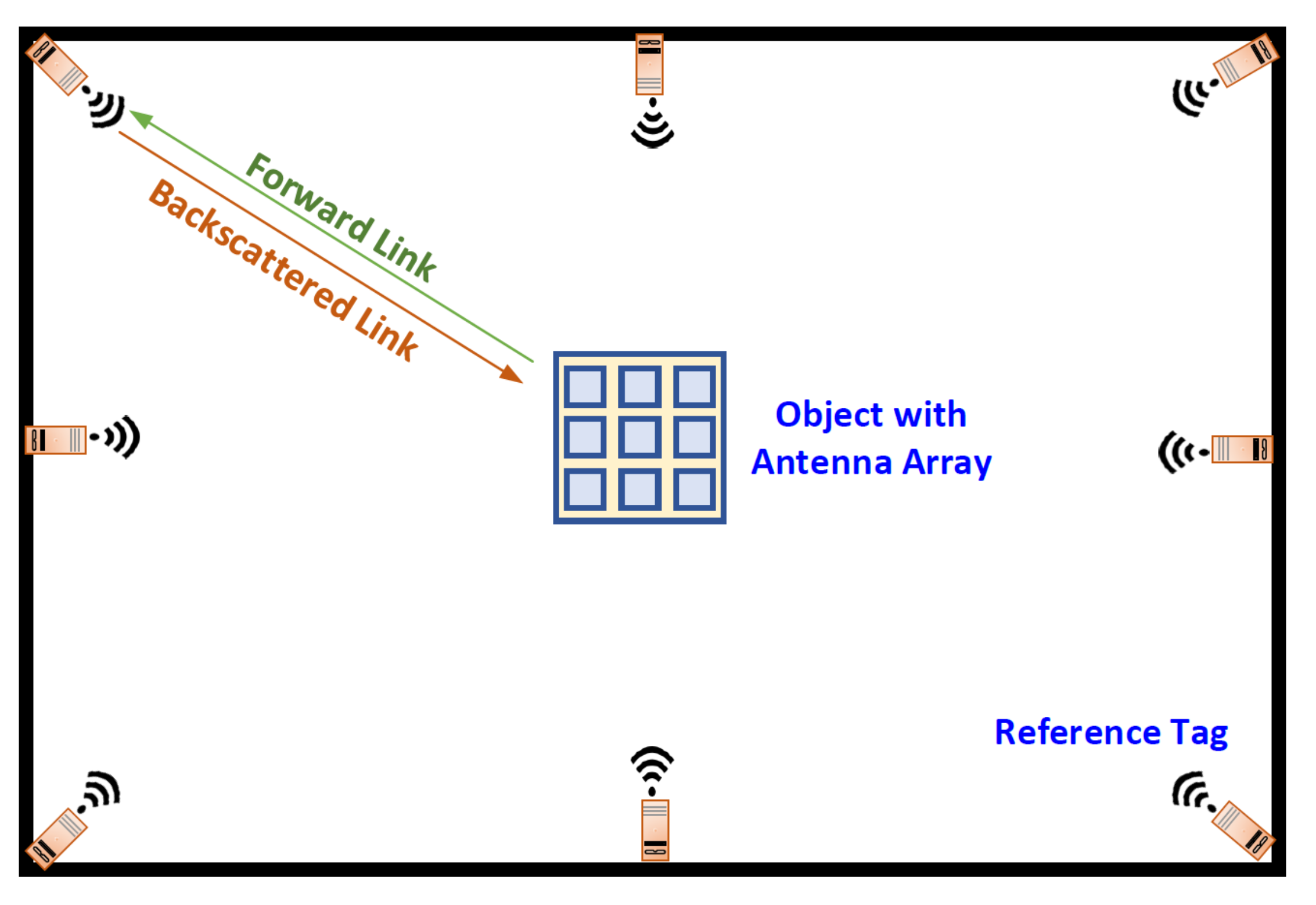
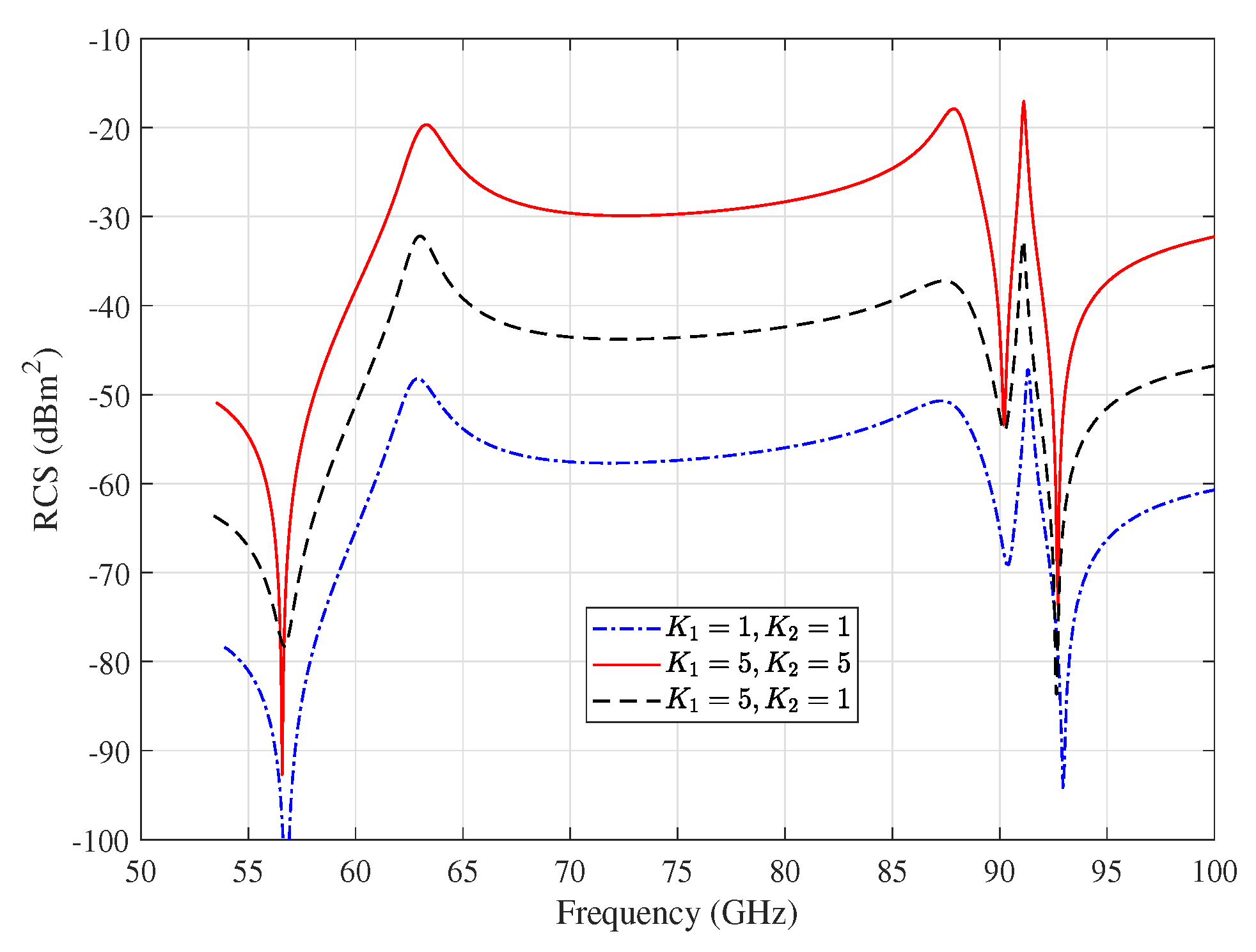
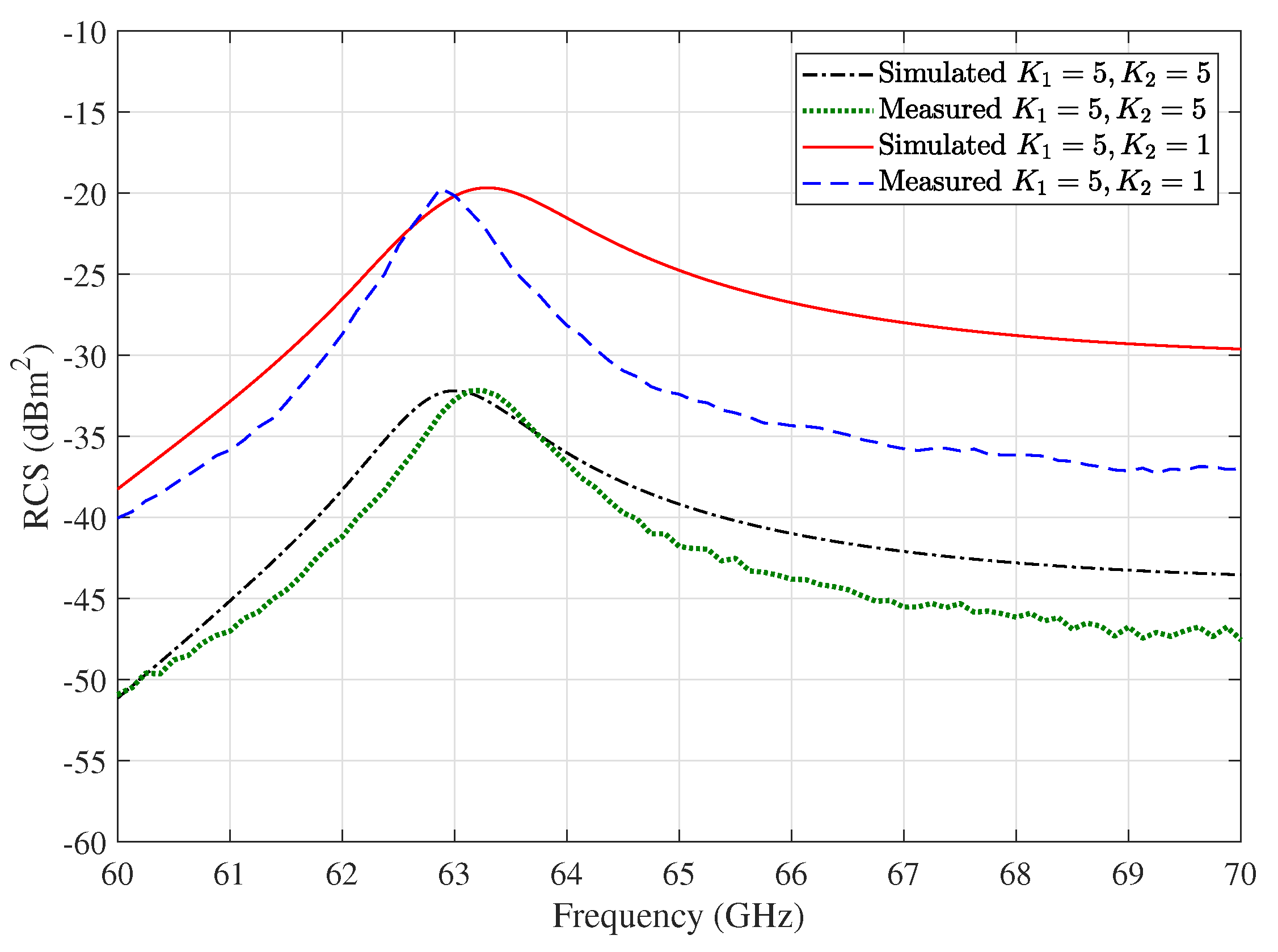
- We propose large-scale MIMO-based RSSI localization at mm-wave band using the extremely simple dielectric resonator (DR) tags as the anchor node infrastructure in order to improve the self-localization accuracy of smart objects. Unlike UHF and UWB, mm-wave band offers the advantage of equipping large-scale MIMO structure at the reader and tag sides. The reader is equipped with a large-scale antenna in order to benefit from the channel hardening, making the small-scale quickly diminish with the increase of the array size. Furthermore, each reference DR tag is designed to have its unique resonance frequency and to have an array of DR elements in order to extend the ranging coverage. The validation of the DR tag is presented using measurements.
- We apply the weighted linear least-squares (WLLS) estimator combined with the optimal large-scale MIMO-based ranging technique in order to estimate the position of the object.
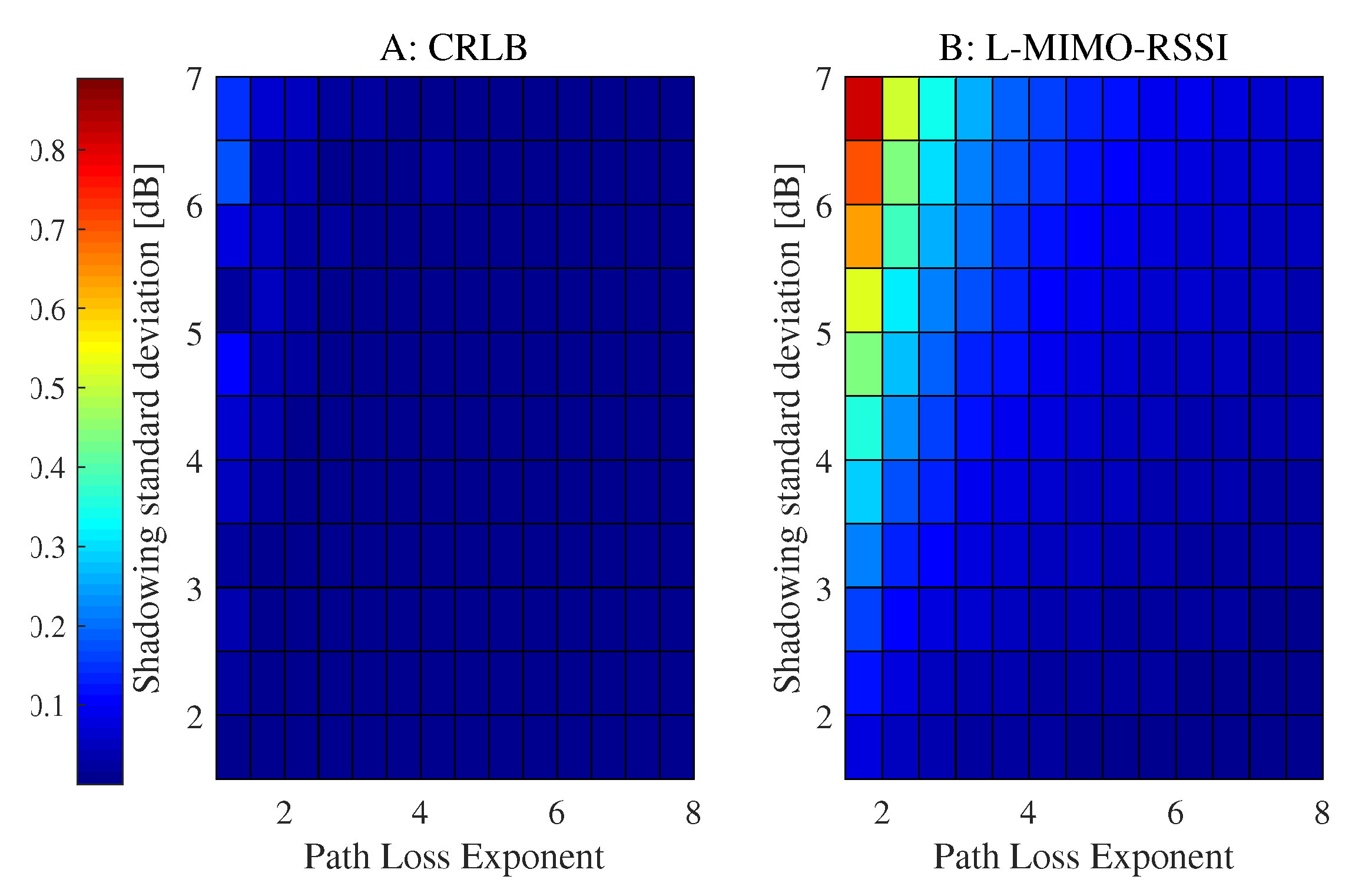
- We derive the Cramér–Rao Lower Bound (CRLB) for the variance of the position estimator for the proposed framework.
- Two sub-optimal algorithms are proposed, which can approach the performance of the optimal large-scale MIMO-based ranging with low computational complexity.
- Simulations are performed using analytical and deterministic channels to demonstrate the performance of the proposed algorithms considering various topologies of the infrastructure. These results show that the proposed method significantly improves the localization accuracy with simple hardware and computational complexity.
2. Related Work
3. System Model
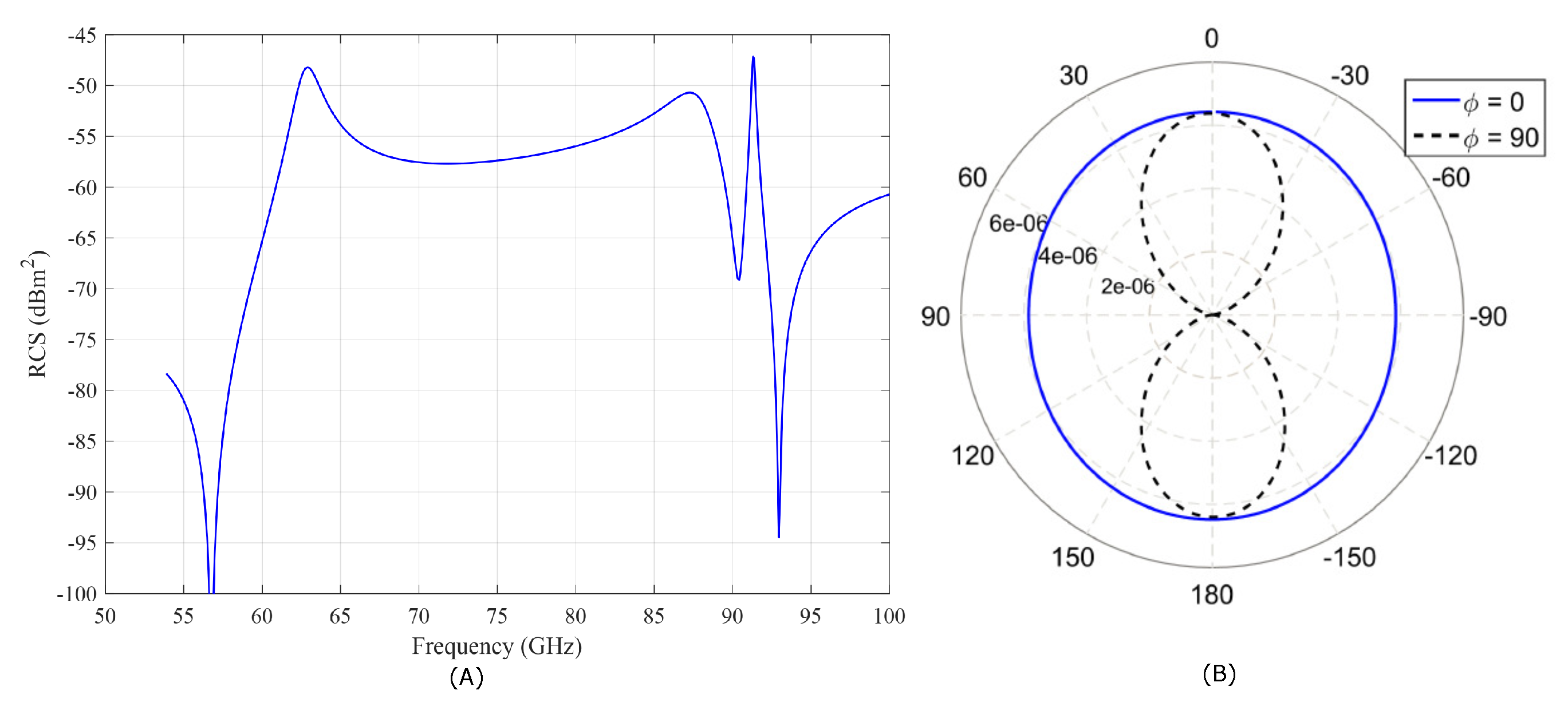
3.1. Tag Setup
3.2. System Configuration
3.3. RSSI Modeling
4. Large-Scale MIMO-Based RSSI Localization
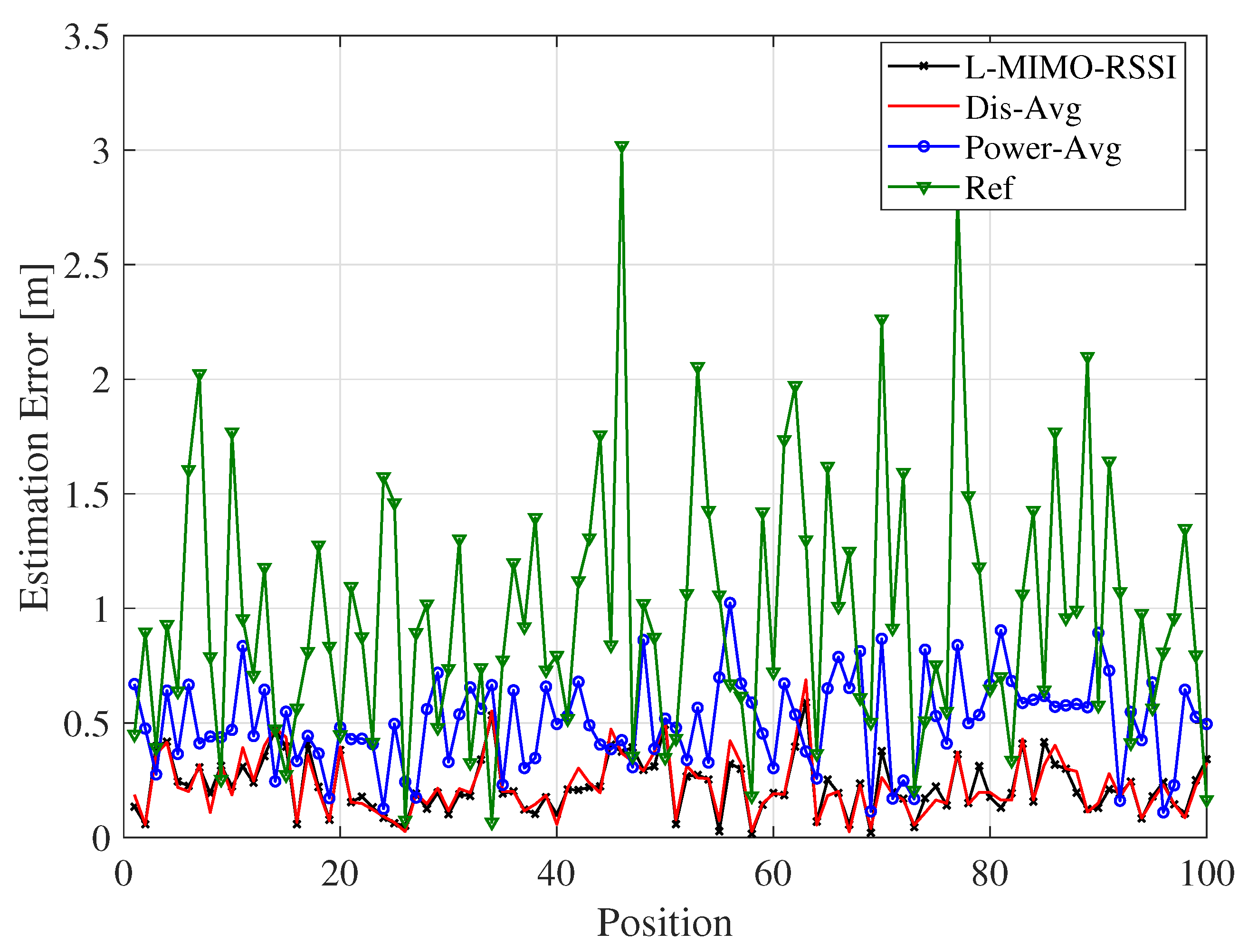
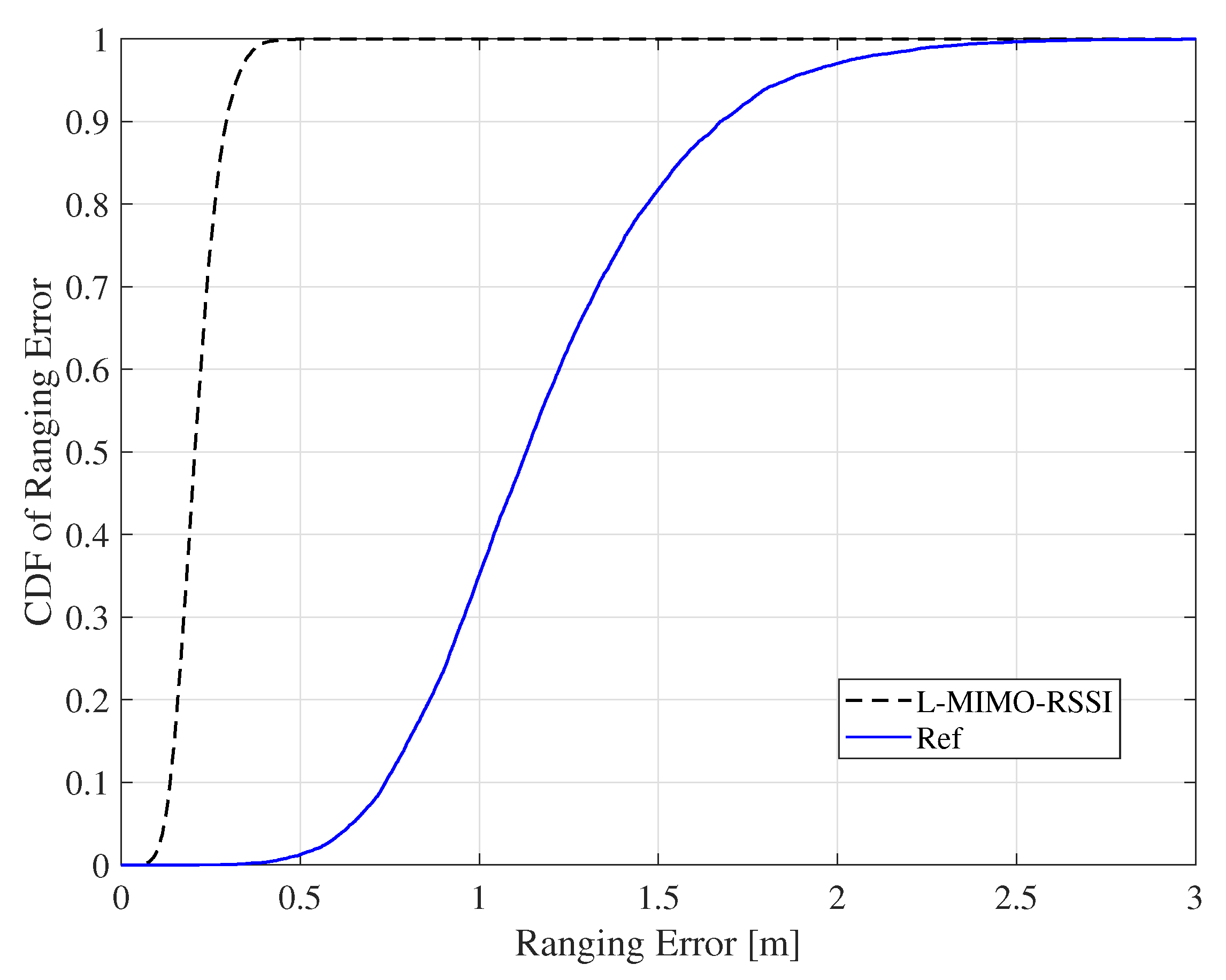
4.1. Ranging
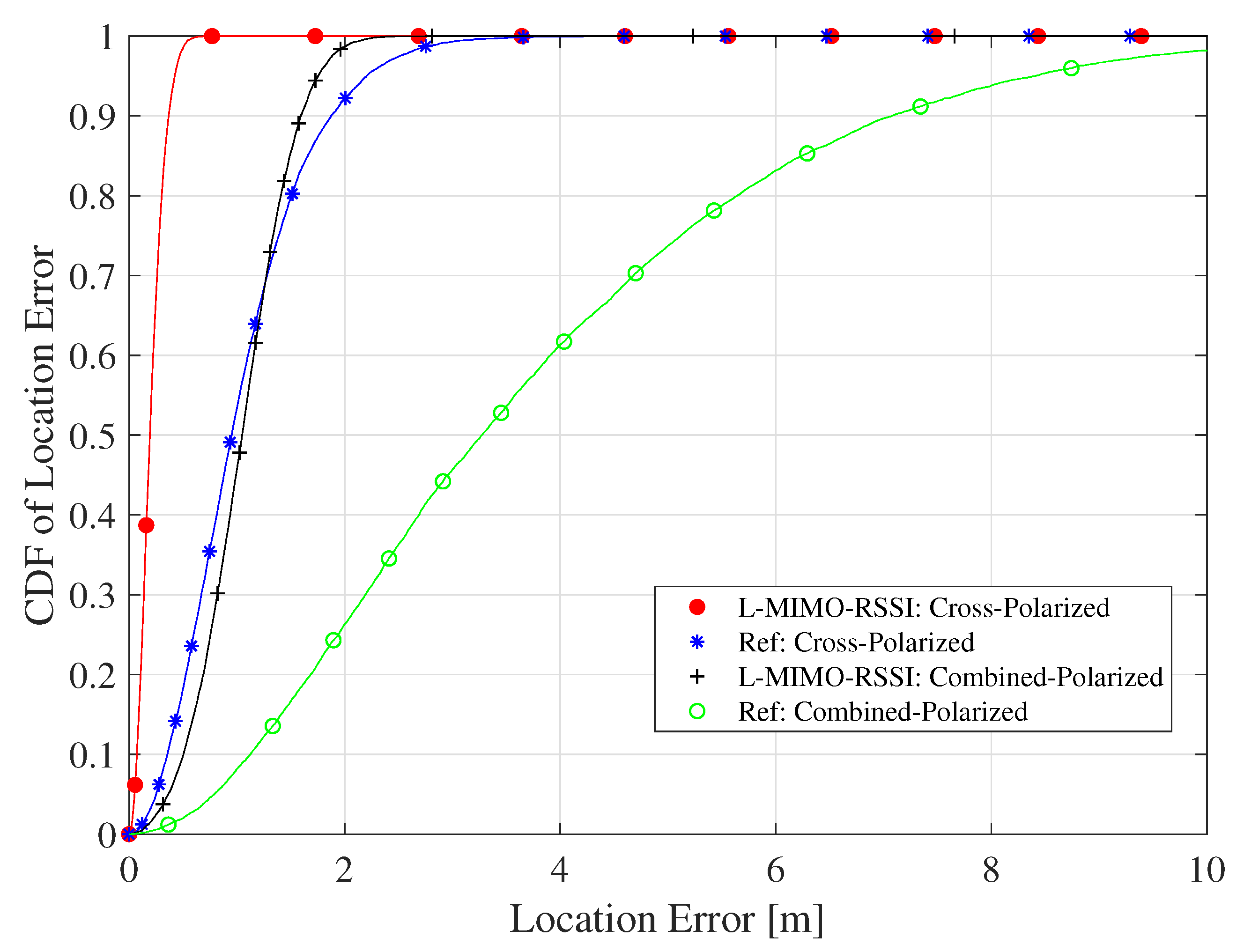
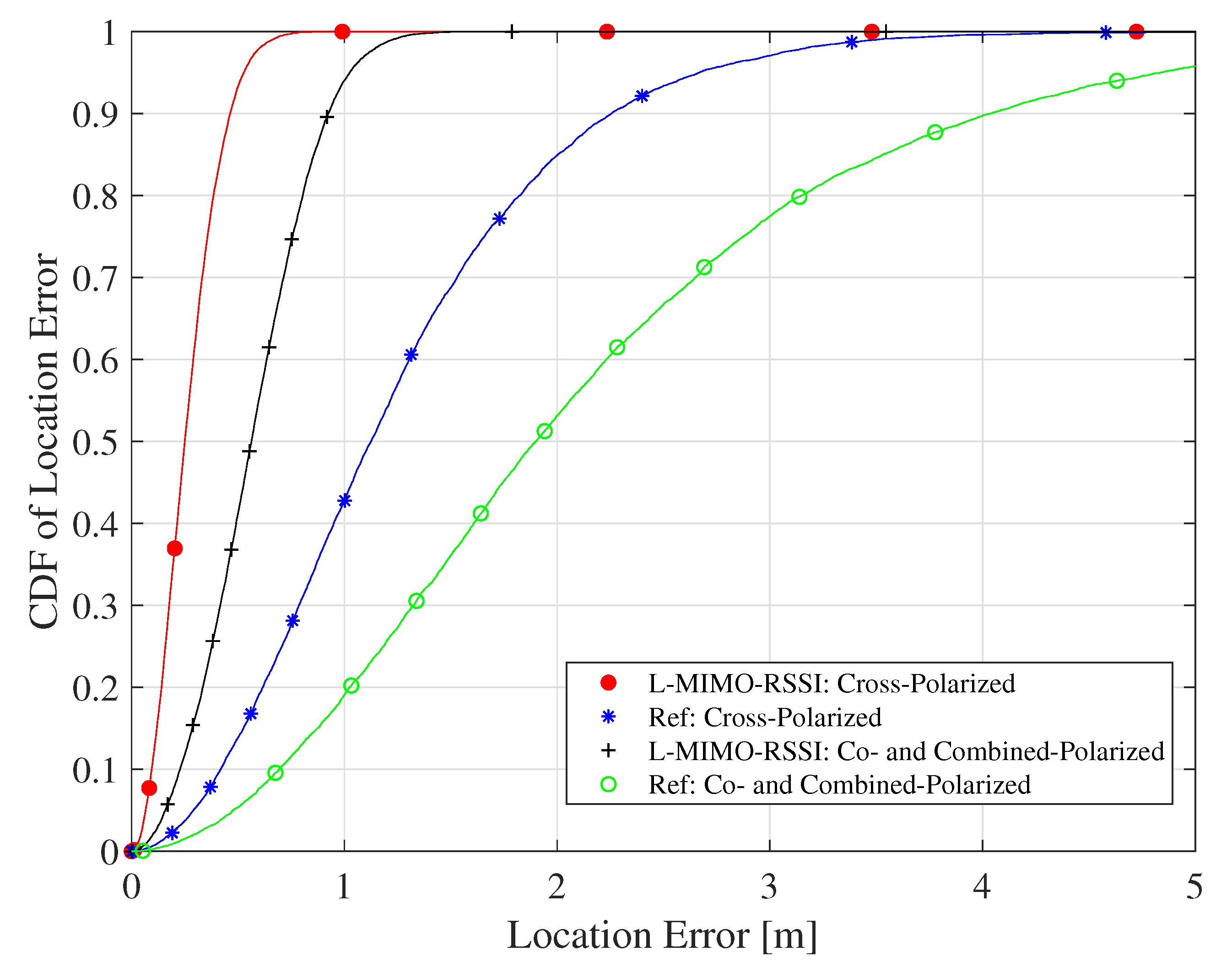
4.2. Location Estimation Methods
4.3. Cramér–Rao Lower Bound Derivation
5. The Sub-Optimal Algorithms
5.1. Distance-Based Averaging (Dis-Avg) Algorithm
5.2. Power-Based Averaging (Power-Avg) Algorithm
6. Measurements and Simulation Setup
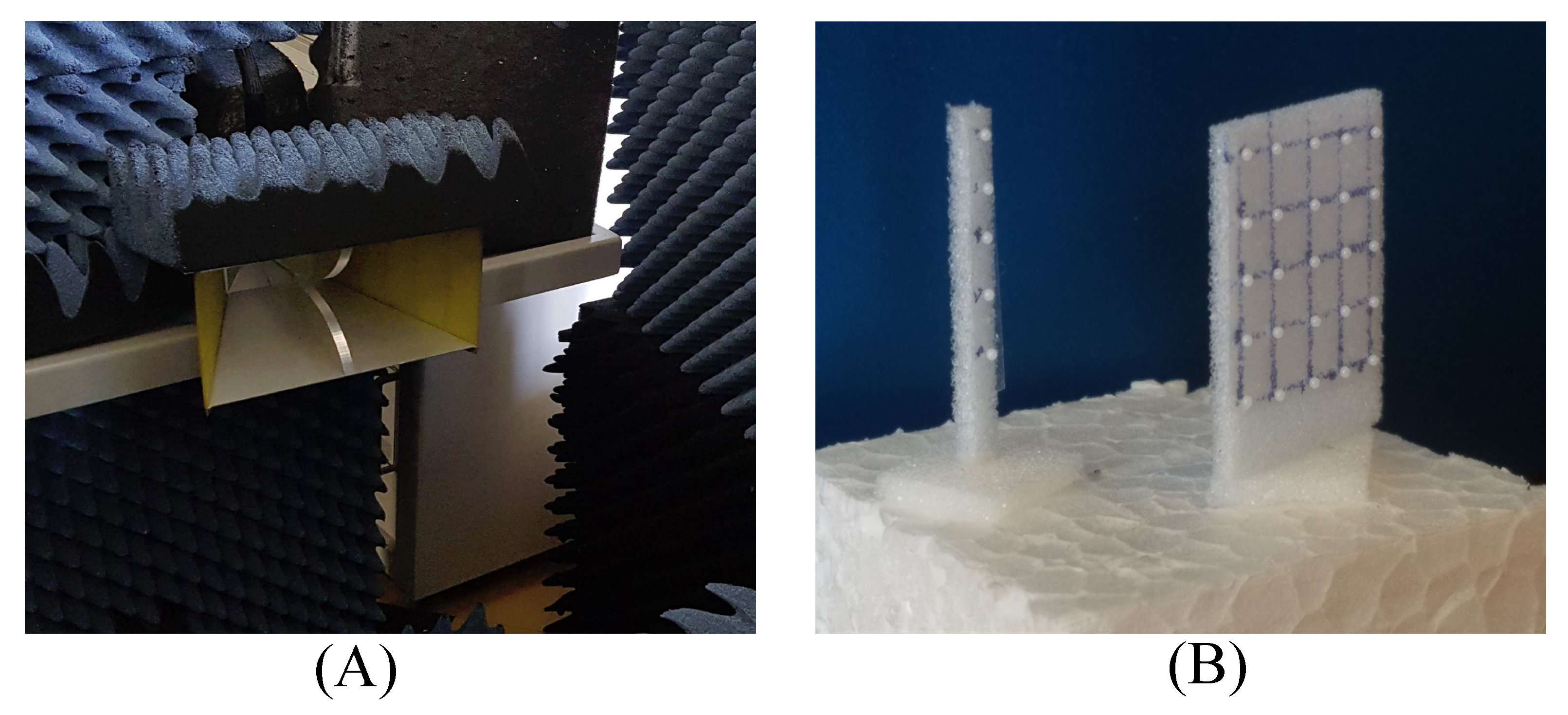
6.1. Measurements
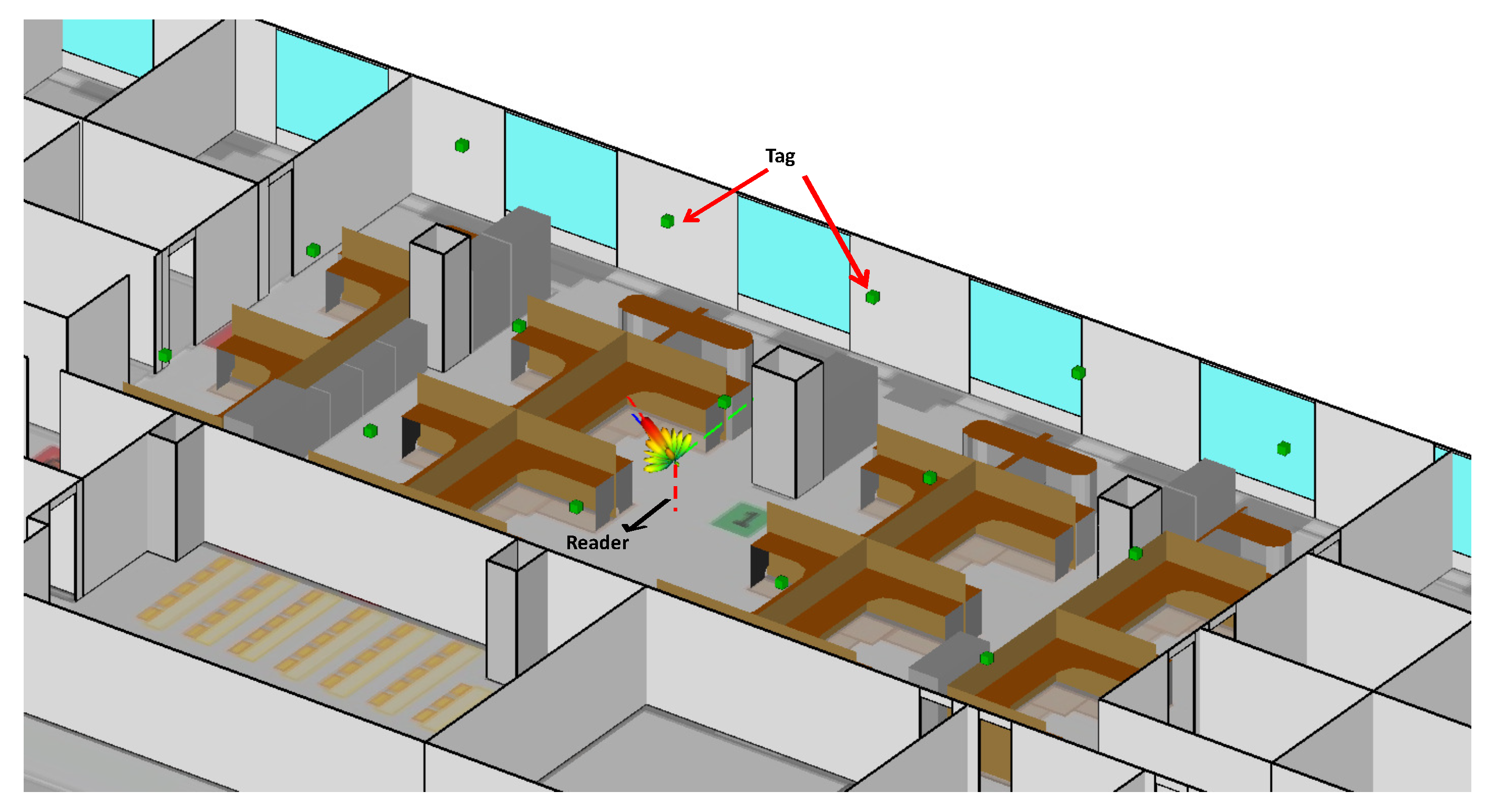
6.2. Localization Coverage Area
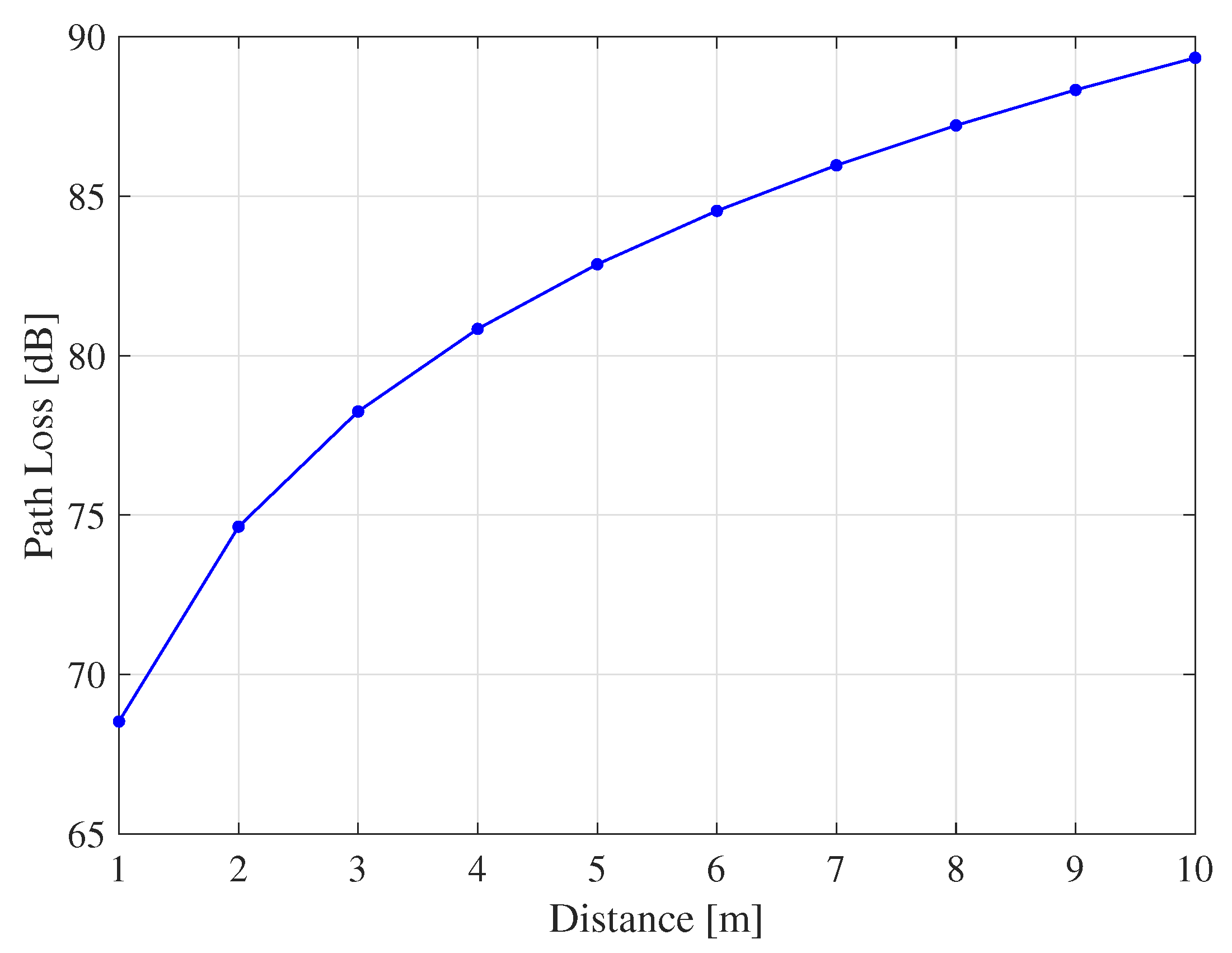
6.3. Path Loss Model Using 3D Ray-Tracing
7. Results and Discussion
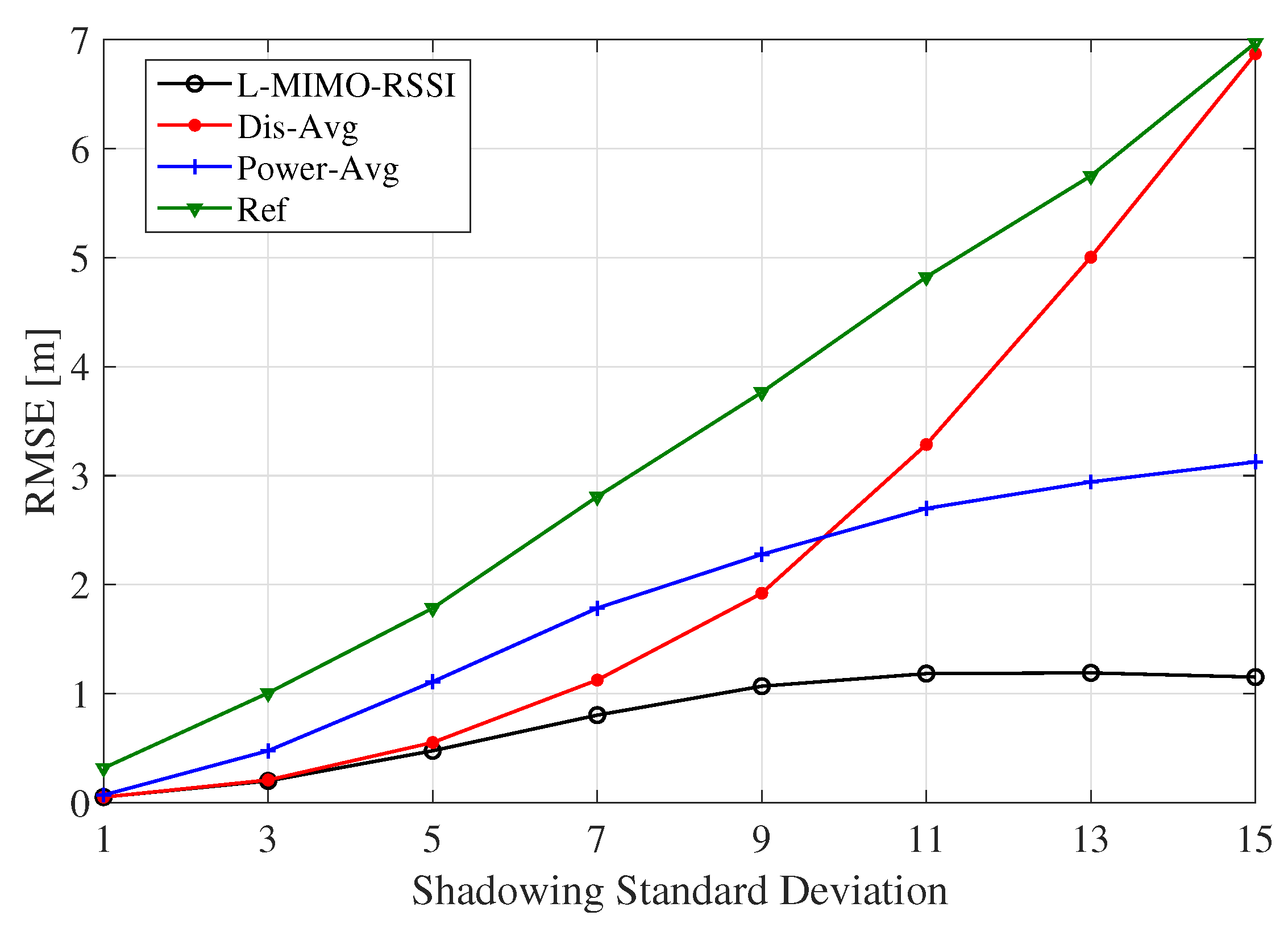
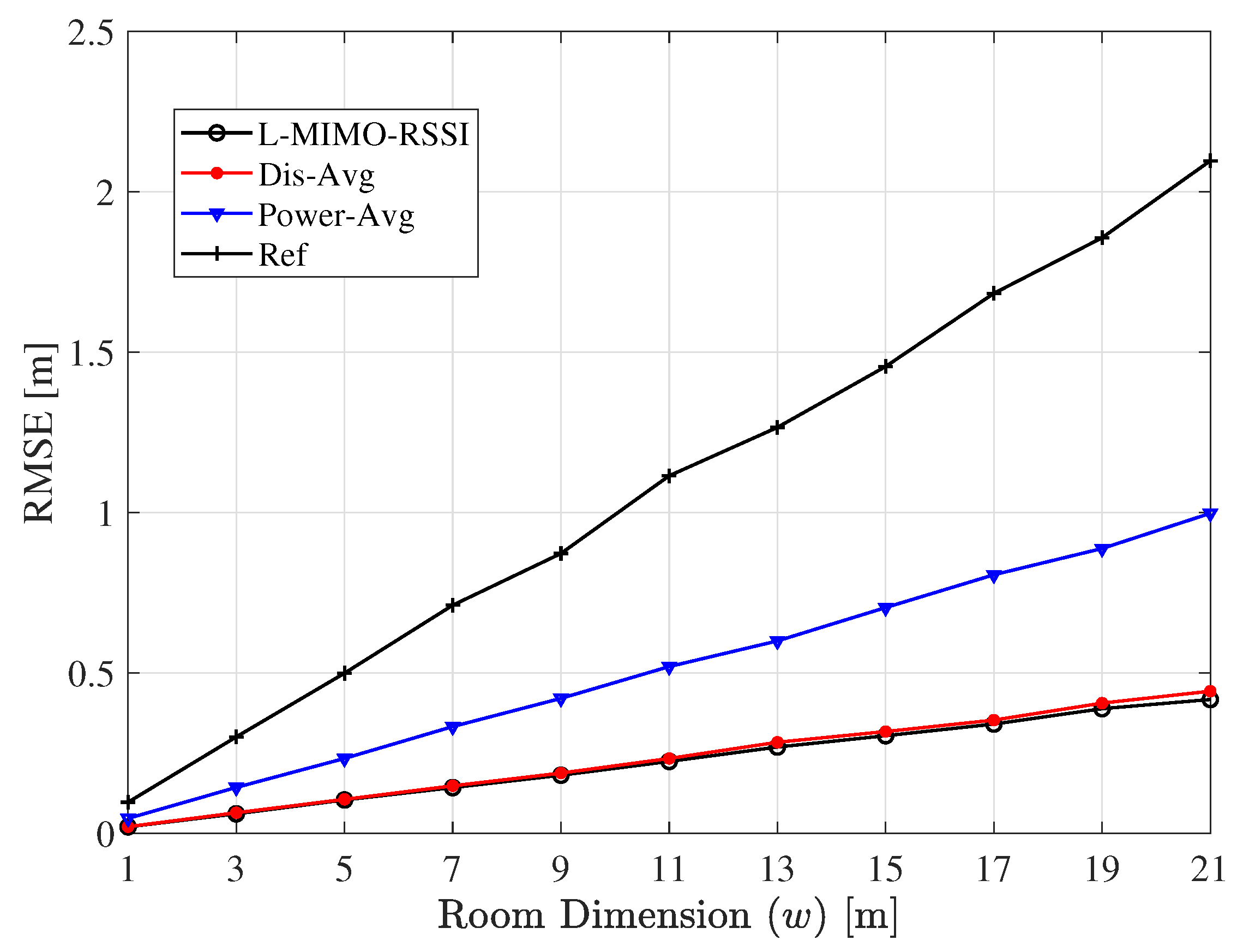
7.1. Analytical Channels
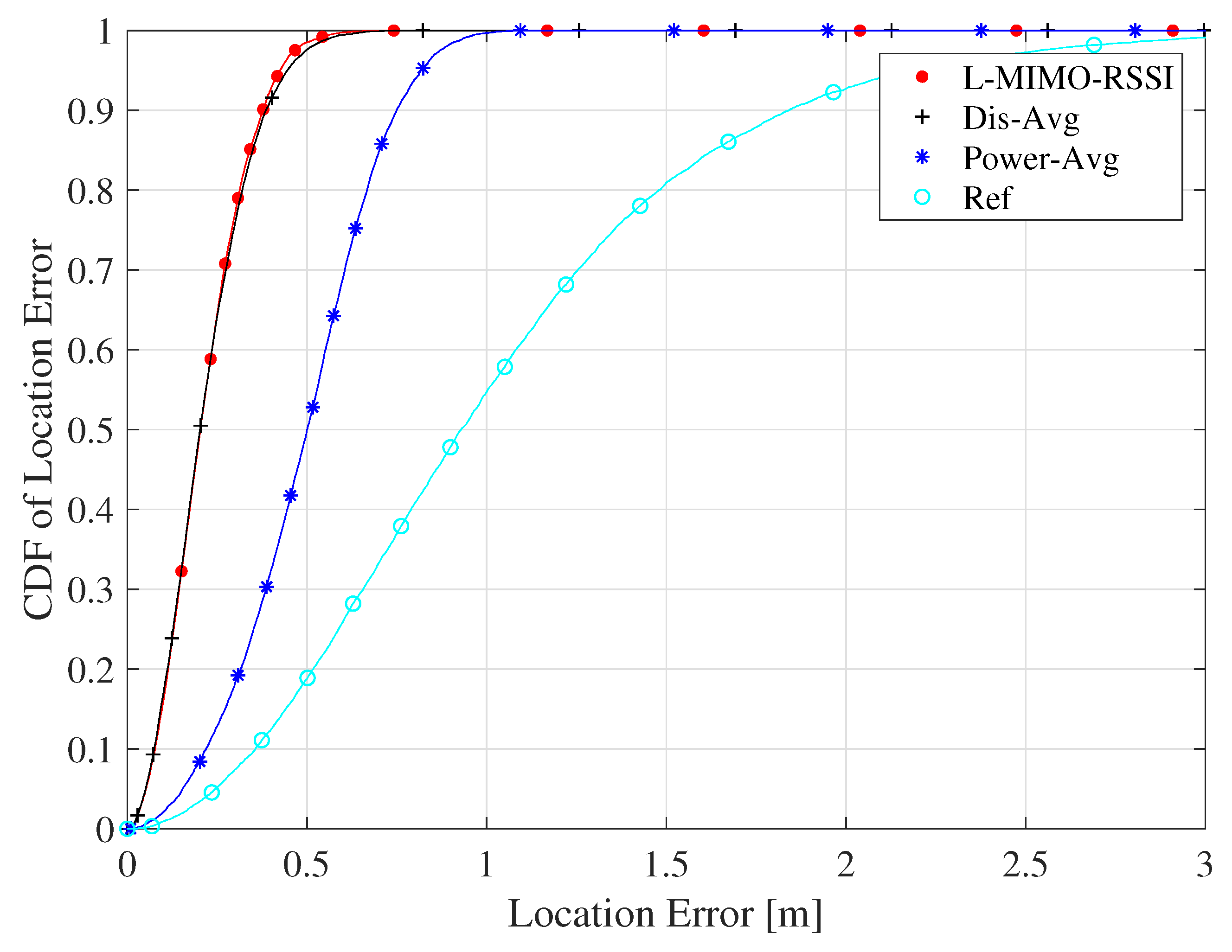
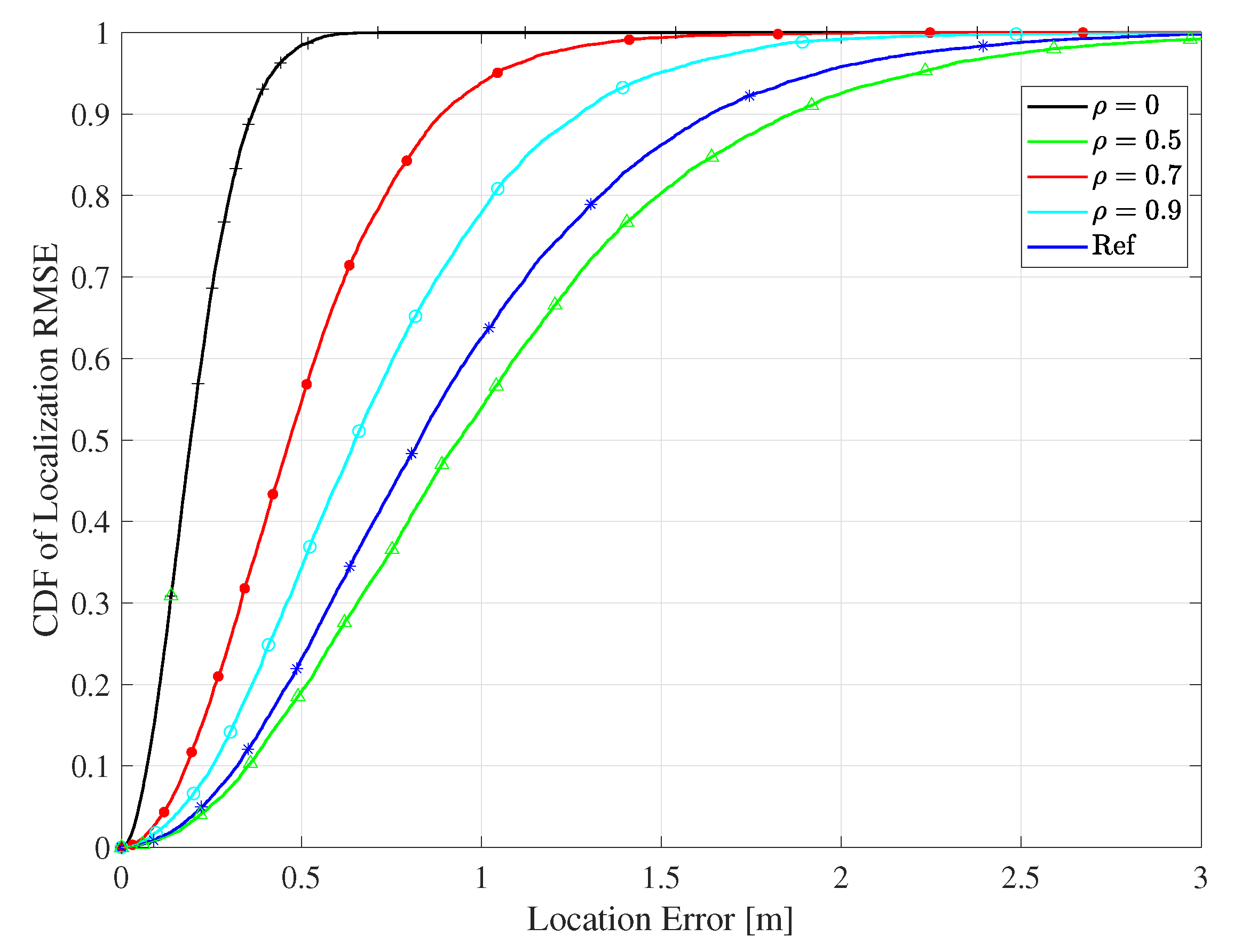
7.2. Deterministic Channels
8. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Zheng, F.; Kaiser, T. Digital Signal Processing for RFID; Information and Communication Technology Series; Wiley: Hoboken, NJ, USA, 2016. [Google Scholar]
- El-Absi, M.; Alhaj Abbas, A.; Abuelhaija, A.; Zheng, F.; Solbach, K.; Kaiser, T. High-Accuracy Indoor Localization Based on Chipless RFID Systems at THz Band. IEEE Access 2018, 6, 54355–54368. [Google Scholar] [CrossRef]
- Alhaj Abbas, A.; El-Absi, M.; Abualhijaa, A.; Solbach, K.; Kaiser, T. Dielectric Resonator-Based Passive Chipless Tag With Angle-of-Arrival Sensing. IEEE Trans. Microw. Theory Tech. 2019, 67, 2010–2017. [Google Scholar] [CrossRef]
- Li, C.; Mo, L.; Zhang, D. Review on UHF RFID Localization Methods. IEEE J. Radio Freq. Identif. 2019, 3, 205–215. [Google Scholar] [CrossRef]
- Miesen, R.; Ebelt, R.; Kirsch, F.; Schäfer, T.; Li, G.; Wang, H.; Vossiek, M. Where is the Tag? IEEE Microw. Mag. 2011, 12, S49–S63. [Google Scholar] [CrossRef]
- Guidi, F.; Decarli, N.; Dardari, D.; Mani, F.; D’Errico, R. Passive Millimeter-Wave RFID Using Backscattered Signals. In Proceedings of the IEEE Globecom Workshops (GC Wkshps), Washington, DC, USA, 4–8 December 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Pursula, P.; Donzelli, F.; Seppa, H. Passive RFID at Millimeter Waves. IEEE Trans. Microw. Theory Tech. 2011, 59, 2151–2157. [Google Scholar] [CrossRef]
- Patwari, N.; Hero, A.O.; Perkins, M.; Correal, N.S.; O’Dea, R.J. Relative location estimation in wireless sensor networks. IEEE Trans. Signal Process. 2003, 51, 2137–2148. [Google Scholar] [CrossRef]
- Patwari, N.; Ash, J.N.; Kyperountas, S.; Hero, A.O.; Moses, R.L.; Correal, N.S. Locating the nodes: Cooperative localization in wireless sensor networks. IEEE Signal Process. Mag. 2005, 22, 54–69. [Google Scholar] [CrossRef]
- Tomic, S.; Beko, M.; Dinis, R. 3-D Target Localization in Wireless Sensor Networks Using RSS and AoA Measurements. IEEE Trans. Veh. Technol. 2017, 66, 3197–3210. [Google Scholar] [CrossRef]
- Moragrega, A.; Closas, P.; Ibars, C. Potential Game for Energy-Efficient RSS-Based Positioning in Wireless Sensor Networks. IEEE J. Sel. Areas Commun. 2015, 33, 1394–1406. [Google Scholar] [CrossRef]
- So, H.C.; Lin, L. Linear Least Squares Approach for Accurate Received Signal Strength Based Source Localization. IEEE Trans. Signal Process. 2011, 59, 4035–4040. [Google Scholar] [CrossRef]
- Zhang, S.; Yang, C.; Jiang, D.; Kui, X.; Guo, S.; Zomaya, A.Y.; Wang, J. Nothing Blocks Me: Precise and Real-Time LOS/NLOS Path Recognition in RFID Systems. IEEE Internet Things J. 2019, 6, 5814–5824. [Google Scholar] [CrossRef]
- Gentile, C.; Alsindi, N.; Raulefs, R.; Teolis, C. Geolocation Techniques: Principles and Applications; Springer: New York, NY, USA, 2012. [Google Scholar]
- Werner, M. Indoor Location-Based Services: Prerequisites and Foundations; Springer: Berlin, Germany, 2014. [Google Scholar]
- Ciftler, B.S.; Kadri, A.; Güvenc, I. IoT Localization for Bistatic Passive UHF RFID Systems with 3-D Radiation Pattern. IEEE Internet Things J. 2017, 4, 905–916. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, K.; Ma, Y.; Gao, Z.; Zang, Y.; Teng, J. Similarity Analysis-Based Indoor Localization Algorithm With Backscatter Information of Passive UHF RFID Tags. IEEE Sens. J. 2017, 17, 185–193. [Google Scholar] [CrossRef]
- Zhang, Z.; Lu, Z.; Saakian, V.; Qin, X.; Chen, Q.; Zheng, L.R. Item-Level Indoor Localization With Passive UHF RFID Based on Tag Interaction Analysis. IEEE Trans. Ind. Electron. 2014, 61, 2122–2135. [Google Scholar] [CrossRef]
- Gao, Z.; Ma, Y.; Liu, K.; Miao, X.; Zhao, Y. An Indoor Multi-Tag Cooperative Localization Algorithm Based on NMDS for RFID. IEEE Sens. J. 2017, 17, 2120–2128. [Google Scholar] [CrossRef]
- Ciftler, B.S.; Kadri, A.; Guvenc, I. Experimental performance evaluation of passive UHF RFID systems under interference. In Proceedings of the IEEE International Conference on RFID Technology and Applications (RFID-TA), Tokyo, Japan, 16–18 September 2015; pp. 81–86. [Google Scholar] [CrossRef]
- Zheng, X.; Liu, H.; Yang, J.; Chen, Y.; Martin, R.P.; Li, X. A Study of Localization Accuracy Using Multiple Frequencies and Powers. IEEE Trans. Parallel Distrib. Syst. 2014, 25, 1955–1965. [Google Scholar] [CrossRef]
- Ni, L.M.; Liu, Y.; Lau, Y.C.; Patil, A.P. LANDMARC: Indoor location sensing using active RFID. In Proceedings of the First IEEE International Conference on Pervasive Computing and Communications. (PerCom 2003), Fort Worth, TX, USA, 23–26 March 2003; pp. 407–415. [Google Scholar] [CrossRef]
- Zhao, Y.; Liu, Y.; Ni, L.M. VIRE: Active RFID-based Localization Using Virtual Reference Elimination. In Proceedings of the International Conference on Parallel Processing (ICPP 2007), Xi’an, China, 10–17 September 2007; p. 56. [Google Scholar] [CrossRef]
- Ni, W.; Xiao, W.; Toh, Y.K.; Tham, C.K. Fingerprint-MDS based algorithm for indoor wireless localization. In Proceedings of the 21st Annual IEEE International Symposium on Personal, Indoor and Mobile Radio Communications, Istanbul, Turkey, 26–29 September 2010; pp. 1972–1977. [Google Scholar] [CrossRef]
- Kumar, V.; Arablouei, R.; Jurdak, R.; Kusy, B.; Bergmann, N.W. RSSI-based self-localization with perturbed anchor positions. In Proceedings of the IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Soro, B.; Lee, C. Joint Time-Frequency RSSI Features for Convolutional Neural Network-Based Indoor Fingerprinting Localization. IEEE Access 2019, 7, 104892–104899. [Google Scholar] [CrossRef]
- Fu, Y.; Chen, P.; Yang, S.; Tang, J. An Indoor Localization Algorithm Based on Continuous Feature Scaling and Outlier Deleting. IEEE Internet Things J. 2018, 5, 1108–1115. [Google Scholar] [CrossRef]
- Hoang, M.T.; Yuen, B.; Dong, X.; Lu, T.; Westendorp, R.; Reddy, K. Recurrent Neural Networks for Accurate RSSI Indoor Localization. IEEE Internet Things J. 2019, 6, 10639–10651. [Google Scholar] [CrossRef]
- Li, H.; Qian, Z.; Tian, C.; Wang, X. TILoc: Improving the robustness and accuracy for fingerprint-based indoor localization. IEEE Internet Things J. 2020, 1. [Google Scholar] [CrossRef]
- Guidi, F.; Decarli, N.; Dardari, D.; Mani, F.; D’Errico, R. Millimeter-Wave Beamsteering for Passive RFID Tag Localization. IEEE J. Radio Freq. Identif. 2018, 1. [Google Scholar] [CrossRef]
- Vari, M.; Cassioli, D. mmWaves RSSI indoor network localization. In Proceedings of the IEEE International Conference on Communications Workshops (ICC), Sydney, Australia, 10–14 June 2014; pp. 127–132. [Google Scholar] [CrossRef]
- El-Absi, M.; Alhaj-Abbas, A.; Abuelhaija, A.; Solbach, K.; Kaiser, T. Chipless RFID Infrastructure Based Self-Localization: Testbed Evaluation. IEEE Trans. Veh. Technol. 2020, 1. [Google Scholar] [CrossRef]
- Björnson, E.; Larsson, E.G.; Marzetta, T.L. Massive MIMO: Ten myths and one critical question. IEEE Commun. Mag. 2016, 54, 114–123. [Google Scholar] [CrossRef]
- Lu, L.; Li, G.Y.; Swindlehurst, A.L.; Ashikhmin, A.; Zhang, R. An Overview of Massive MIMO: Benefits and Challenges. IEEE J. Sel. Top. Signal Process. 2014, 8, 742–758. [Google Scholar] [CrossRef]
- Errington, A.F.C.; Daku, B.L.F.; Prugger, A.F. Initial Position Estimation Using RFID Tags: A Least-Squares Approach. IEEE Trans. Instrum. Meas. 2010, 59, 2863–2869. [Google Scholar] [CrossRef]
- Shirehjini, A.A.N.; Yassine, A.; Shirmohammadi, S. An RFID-Based Position and Orientation Measurement System for Mobile Objects in Intelligent Environments. IEEE Trans. Instrum. Meas. 2012, 61, 1664–1675. [Google Scholar] [CrossRef]
- Xu, H.; Wu, M.; Li, P.; Zhu, F.; Wang, R. An RFID Indoor Positioning Algorithm Based on Support Vector Regression. Sensors 2018, 18, 1504. [Google Scholar] [CrossRef]
- Xu, H.; Ding, Y.; Li, P.; Wang, R.; Li, Y. An RFID Indoor Positioning Algorithm Based on Bayesian Probability and K-Nearest Neighbor. Sensors 2017, 17, 1806. [Google Scholar] [CrossRef]
- Wang, J.; Ma, Y.; Zhao, Y.; Liu, K. A Multipath Mitigation Localization Algorithm Based on MDS for Passive UHF RFID. IEEE Commun. Lett. 2015, 19, 1652–1655. [Google Scholar] [CrossRef]
- Wang, C.; Shi, Z.; Wu, F. Intelligent RFID Indoor Localization System Using a Gaussian Filtering Based Extreme Learning Machine. Symmetry 2017, 9, 30. [Google Scholar] [CrossRef]
- Koike-Akino, T.; Wang, P.; Pajovic, M.; Sun, H.; Orlik, P.V. Fingerprinting-Based Indoor Localization with Commercial MMWave WiFi: A Deep Learning Approach. IEEE Access 2020, 8. [Google Scholar] [CrossRef]
- Hu, A.; Lv, T.; Gao, H.; Zhang, Z.; Yang, S. An ESPRIT-Based Approach for 2-D Localization of Incoherently Distributed Sources in Massive MIMO Systems. IEEE J. Sel. Top. Signal Process. 2014, 8, 996–1011. [Google Scholar] [CrossRef]
- Savic, V.; Larsson, E.G. Fingerprinting-Based Positioning in Distributed Massive MIMO Systems. In Proceedings of the IEEE 82nd Vehicular Technology Conference (VTC2015-Fall), Boston, MA, USA, 6–9 December 2015; pp. 1–5. [Google Scholar] [CrossRef]
- Guidi, F.; Guerra, A.; Dardari, D. Personal Mobile Radars with Millimeter-Wave Massive Arrays for Indoor Mapping. IEEE Trans. Mob. Comput. 2016, 15, 1471–1484. [Google Scholar] [CrossRef]
- Guidi, F.; Guerra, A.; Dardari, D. Millimeter-wave massive arrays for indoor SLAM. In Proceedings of the IEEE International Conference on Communications Workshops (ICC), Sydney, Australia, 10–14 June 2014; pp. 114–120. [Google Scholar] [CrossRef]
- Garcia, N.; Wymeersch, H.; Larsson, E.G.; Haimovich, A.M.; Coulon, M. Direct Localization for Massive MIMO. IEEE Trans. Signal Process. 2017, 65, 2475–2487. [Google Scholar] [CrossRef]
- Vukmirović, N.; Janjić, M.; Djurić, P.; Erić, M. Direct Localization for Massive MIMO. EURASIP J. Adv. Signal Process. 2018, 33, 1687–6180. [Google Scholar] [CrossRef]
- Ni, L.M.; Zhang, D.; Souryal, M.R. RFID-based localization and tracking technologies. IEEE Wirel. Commun. 2011, 18, 45–51. [Google Scholar] [CrossRef]
- Kubina, B.; Schüßler, M.; Mandel, C.; Mehmood, A.; Jakoby, R. Wireless high-temperature sensing with a chipless tag based on a dielectric resonator antenna. IEEE Sens. 2013, 1–4. [Google Scholar] [CrossRef]
- Abbas, A.; Abuelhaija, A.; Solbach, K. Investigation of the transient EM scattering of a dielectric resonator. In Proceedings of the 11th German Microwave Conference (GeMiC), Freiburg, Germany, 12–14 March 2018; pp. 271–274. [Google Scholar] [CrossRef]
- El-Absi, M.; Abuelhaija, A.; Abbas, A.; Zheng, F.; Abbas, A.; Solbach, K.; Kaiser, T. Chipless Tags Infrastructure based Localization in Indoor Environments. In Proceedings of the German Microwave Conference, Freiburg, Germany, 12–14 March 2018. [Google Scholar] [CrossRef]
- CST GmbH. Available online: https://www.cst-germany.de/ (accessed on 15 July 2020).
- Abbas, A.A.; El-Absi, M.; Abuelhaijay, A.; Solbach, K.; Kaiser, T. THz Passive RFID Tag Based on Dielectric Resonator Linear Array. In Proceedings of the Second International Workshop on Mobile Terahertz Systems (IWMTS), Bad Neuenahr, Germany, 1–3 July 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Ramos, A.; Perret, E.; Rance, O.; Tedjini, S.; Lázaro, A.; Girbau, D. Temporal Separation Detection for Chipless Depolarizing Frequency-Coded RFID. IEEE Trans. Microw. Theory Tech. 2016, 64, 2326–2337. [Google Scholar] [CrossRef]
- Khaliel, M.; El-Awamry, A.; Megahed, A.F.; Kaiser, T. A Novel Design Approach for Co/Cross-Polarizing Chipless RFID Tags of High Coding Capacity. IEEE J. Radio Freq. Identif. 2017, 1, 135–143. [Google Scholar] [CrossRef]
- Bekkali, A.; Zou, S.; Kadri, A.; Crisp, M.; Penty, R.V. Performance Analysis of Passive UHF RFID Systems Under Cascaded Fading Channels and Interference Effects. IEEE Trans. Wirel. Commun. 2015, 14, 1421–1433. [Google Scholar] [CrossRef]
- Rappaport, T. Wireless Communications: Principles and Practice, 2nd ed.; Prentice Hall PTR: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Azevedo, J.A.R.; Santos, F.E.S. An Empirical Propagation Model for Forest Environments at Tree Trunk Level. IEEE Trans. Antennas Propag. 2011, 59, 2357–2367. [Google Scholar] [CrossRef]
- El-Sayed, H.; Athanasiou, G.; Fischione, C. Evaluation of localization methods in millimeter-wave wireless systems. In Proceedings of the IEEE 19th International Workshop on Computer Aided Modeling and Design of Communication Links and Networks (CAMAD), Athens, Greece, 1–3 December 2014; pp. 345–349. [Google Scholar] [CrossRef]
- Saab, S.S.; Nakad, Z.S. A Standalone RFID Indoor Positioning System Using Passive Tags. IEEE Trans. Ind. Electron. 2011, 58, 1961–1970. [Google Scholar] [CrossRef]
- Sahu, P.K.; Wu, E.H.K.; Sahoo, J. DuRT: Dual RSSI Trend Based Localization for Wireless Sensor Networks. IEEE Sens. J. 2013, 13, 3115–3123. [Google Scholar] [CrossRef]
- Hasani, M.; Lohan, E.S.; Sydänheimo, L.; Ukkonen, L. Path-loss model of embroidered passive RFID tag on human body for indoor positioning applications. In Proceedings of the IEEE RFID Technology and Applications Conference (RFID-TA), Tampere, Finland, 8–9 September 2014; pp. 170–174. [Google Scholar] [CrossRef]
- Piersanti, S.; Annoni, L.A.; Cassioli, D. Millimeter waves channel measurements and path loss models. In Proceedings of the IEEE International Conference on Communications (ICC), Ottawa, ON, Canada, 10–15 June 2012; pp. 4552–4556. [Google Scholar] [CrossRef]
- Maccartney, G.R.; Rappaport, T.S.; Sun, S.; Deng, S. Indoor Office Wideband Millimeter-Wave Propagation Measurements and Channel Models at 28 and 73 GHz for Ultra-Dense 5G Wireless Networks. IEEE Access 2015, 3, 2388–2424. [Google Scholar] [CrossRef]
- Khalily, M.; Taheri, S.; Payami, S.; Ghoraishi, M.; Tafazolli, R. Indoor wideband directional millimeter wave channel measurements and analysis at 26 GHz, 32 GHz, and 39 GHz. Trans. Emerg. Telecommun. Technol. 2018, e3311. [Google Scholar] [CrossRef]
- Smulders, P.F.M. Statistical Characterization of 60-GHz Indoor Radio Channels. IEEE Trans. Antennas Propag. 2009, 57, 2820–2829. [Google Scholar] [CrossRef]
- Rappaport, T.S.; Xing, Y.; MacCartney, G.R.; Molisch, A.F.; Mellios, E.; Zhang, J. Overview of Millimeter Wave Communications for Fifth-Generation (5G) Wireless Networks with a Focus on Propagation Models. IEEE Trans. Antennas Propag. 2017, 65, 6213–6230. [Google Scholar] [CrossRef]
- Tarrío, P.; Bernardos, A.M.; Casar, J. Weighted Least Squares Techniques for Improved Received Signal Strength Based Localization. Sensors 2011, 11, 8569. [Google Scholar] [CrossRef]
- Johnson, N.; Kotz, S.; Balakrishnan, N. Continuous Univariate Distributions; Number v. 2 in Wiley Series in Probability and Mathematical Statistics: Applied Probability and Statistics; Wiley & Sons: Hoboken, NJ, USA, 1995. [Google Scholar]
- Mensing, C.; Plass, S. Positioning Algorithms for Cellular Networks Using TDOA. In Proceedings of the IEEE International Conference on Acoustics Speech and Signal Processing, Toulouse, France, 14–19 May 2006; Volume 4, p. IV. [Google Scholar] [CrossRef]
- Ouyang, R.W.; Wong, A.K.S.; Lea, C.T.; Zhang, V.Y. Received Signal Strength-Based Wireless Localization via Semidefinite Programming. In Proceedings of the IEEE Global Telecommunications Conference, Honolulu, HI, USA, 30 November–4 December 2009; pp. 1–6. [Google Scholar] [CrossRef]
- Zhuang, Y.; Li, Y.; Lan, H.; Syed, Z.; El-Sheimy, N. Wireless Access Point Localization Using Nonlinear Least Squares and Multi-Level Quality Control. IEEE Wirel. Commun. Lett. 2015, 4, 693–696. [Google Scholar] [CrossRef]
- Tarrio, P.; Bernardos, A.M.; Besada, J.A.; Casar, J.R. A new positioning technique for RSS-Based localization based on a weighted least squares estimator. In Proceedings of the IEEE International Symposium on Wireless Communication Systems, Reykjavik, Iceland, 21–24 October 2008; pp. 633–637. [Google Scholar] [CrossRef]
- Rao, K.V.S.; Nikitin, P.V.; Rao, K.V.S.; Nikitin, P.V. Theory and measurement of backscattering from RFID tags. IEEE Antennas Propag. Mag. 2006, 48, 212–218. [Google Scholar] [CrossRef]
- Manual, W.I.U. Version 1.5.1. 2003. Available online: http://www.remcom.com/WirelessInSite/ (accessed on 15 July 2020).
- El-Absi, M.; Galih, S.; Hoffmann, M.; El-Hadidy, M.; Kaiser, T. Antenna Selection for Reliable MIMO-OFDM Interference Alignment Systems: Measurement-Based Evaluation. IEEE Trans. Veh. Technol. 2016, 65, 2965–2977. [Google Scholar] [CrossRef]
- Fugen, T.; Maurer, J.; Kayser, T.; Wiesbeck, W. Capability of 3-D Ray Tracing for Defining Parameter Sets for the Specification of Future Mobile Communications Systems. IEEE Trans. Antennas Propag. 2006, 54, 3125–3137. [Google Scholar] [CrossRef]
- Rappaport, T.; Heath, R.; Daniels, R.; Murdock, J. Millimeter Wave Wireless Communications; Prentice Hall: Upper Saddle River, NJ, USA, 2015. [Google Scholar]
- Zafari, F.; Gkelias, A.; Leung, K.K. A Survey of Indoor Localization Systems and Technologies. IEEE Commun. Surv. Tutorials 2019, 21, 2568–2599. [Google Scholar] [CrossRef]
- Schwartz, S.C.; Yeh, Y.S. On the distribution function and moments of power sums with log-normal components. Bell Syst. Tech. J. 1982, 61, 1441–1462. [Google Scholar] [CrossRef]






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Frequency Range | 57–63 GHz |
| Operating Bandwidth | 100 MHz |
| Transmit Power | 10 dBm |
| Reader Antenna Element Gain | 2.15 dBi |
| Room Width and Length |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
El-Absi, M.; Zheng, F.; Abuelhaija, A.; Al-haj Abbas, A.; Solbach, K.; Kaiser, T. Indoor Large-Scale MIMO-Based RSSI Localization with Low-Complexity RFID Infrastructure. Sensors 2020, 20, 3933. https://doi.org/10.3390/s20143933
El-Absi M, Zheng F, Abuelhaija A, Al-haj Abbas A, Solbach K, Kaiser T. Indoor Large-Scale MIMO-Based RSSI Localization with Low-Complexity RFID Infrastructure. Sensors. 2020; 20(14):3933. https://doi.org/10.3390/s20143933
Chicago/Turabian StyleEl-Absi, Mohammed, Feng Zheng, Ashraf Abuelhaija, Ali Al-haj Abbas, Klaus Solbach, and Thomas Kaiser. 2020. "Indoor Large-Scale MIMO-Based RSSI Localization with Low-Complexity RFID Infrastructure" Sensors 20, no. 14: 3933. https://doi.org/10.3390/s20143933
APA StyleEl-Absi, M., Zheng, F., Abuelhaija, A., Al-haj Abbas, A., Solbach, K., & Kaiser, T. (2020). Indoor Large-Scale MIMO-Based RSSI Localization with Low-Complexity RFID Infrastructure. Sensors, 20(14), 3933. https://doi.org/10.3390/s20143933