Improved LiDAR Probabilistic Localization for Autonomous Vehicles Using GNSS




Abstract
:1. Introduction
2. Sensors and Software Architecture
2.1. Software Modules
2.1.1. AMCL
2.1.2. Fusing Method
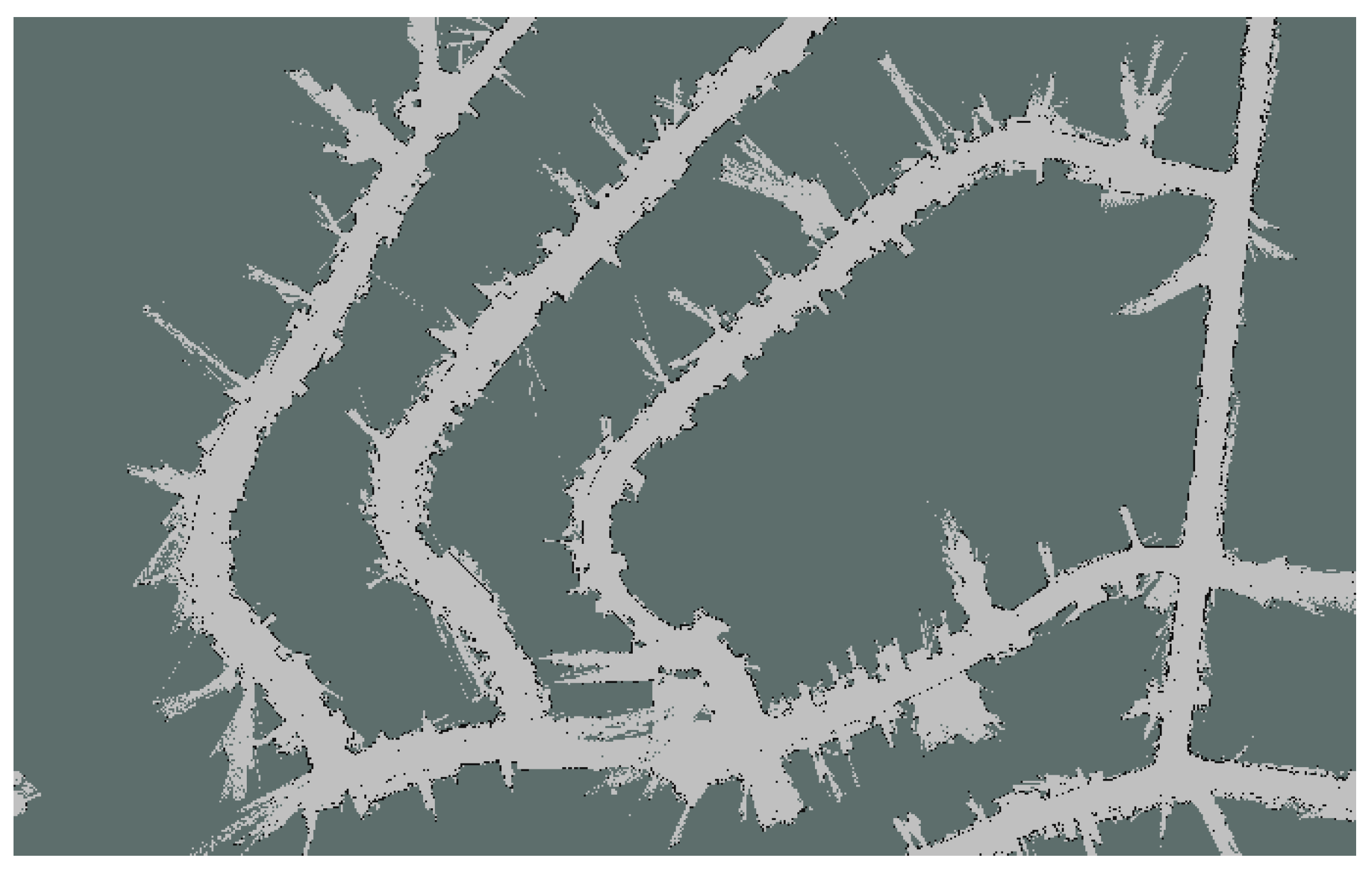
2.1.3. Map Generation
2.2. Vehicle Sensor Setup
2.2.1. LiDAR
2.2.2. GNSS Receiver
2.2.3. Inertial Measurement Unit (IMU) Sensor
3. Method Description
3.1. LiDAR Likelihood
3.2. GNSS likelihood Estimation
3.3. New Particle Weight Computed
3.4. New Particles Generation
| Algorithm 1: New weight and resample of filter particles |
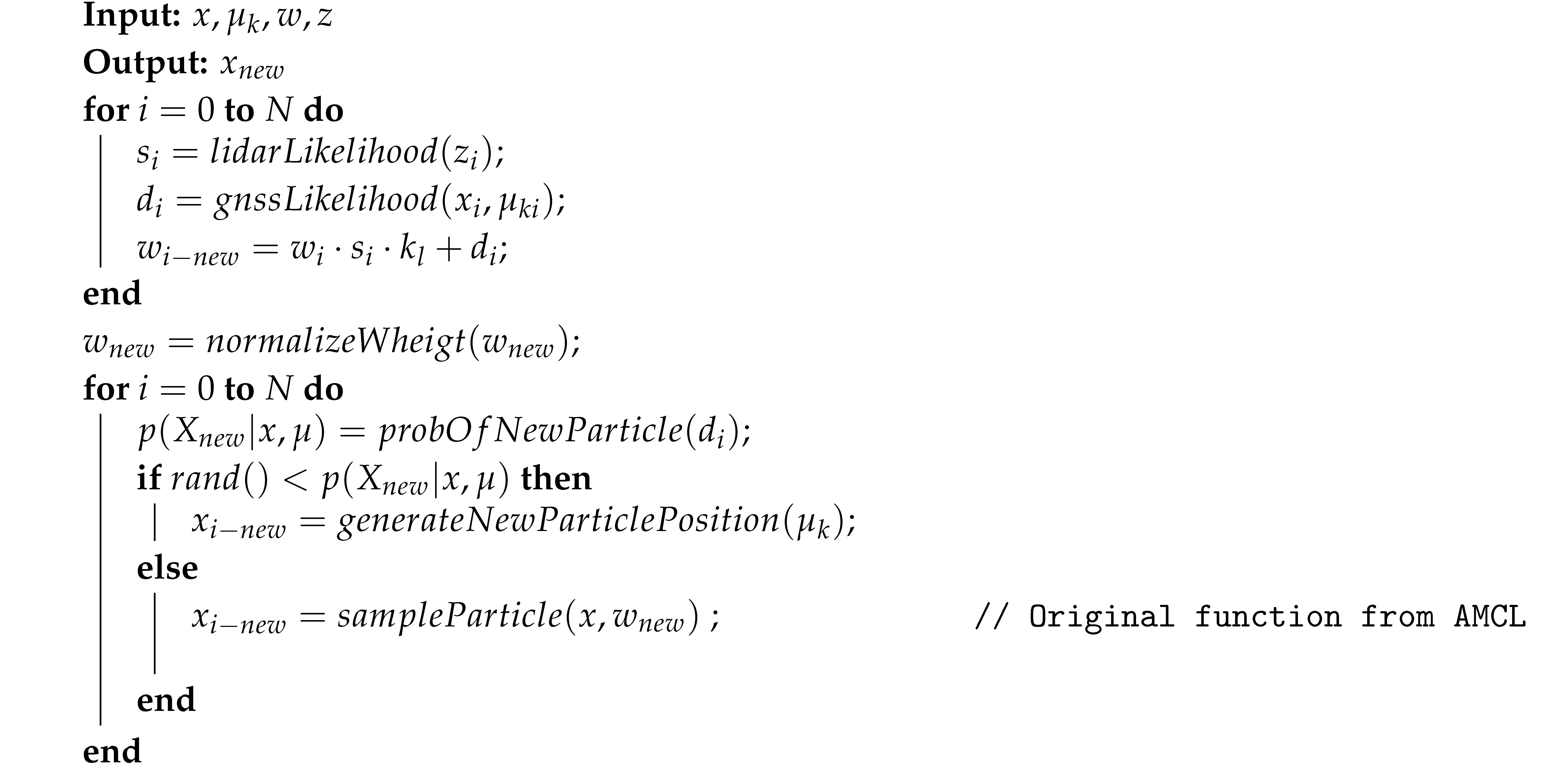 |
4. Experimental Results and Discussion
4.1. Dataset
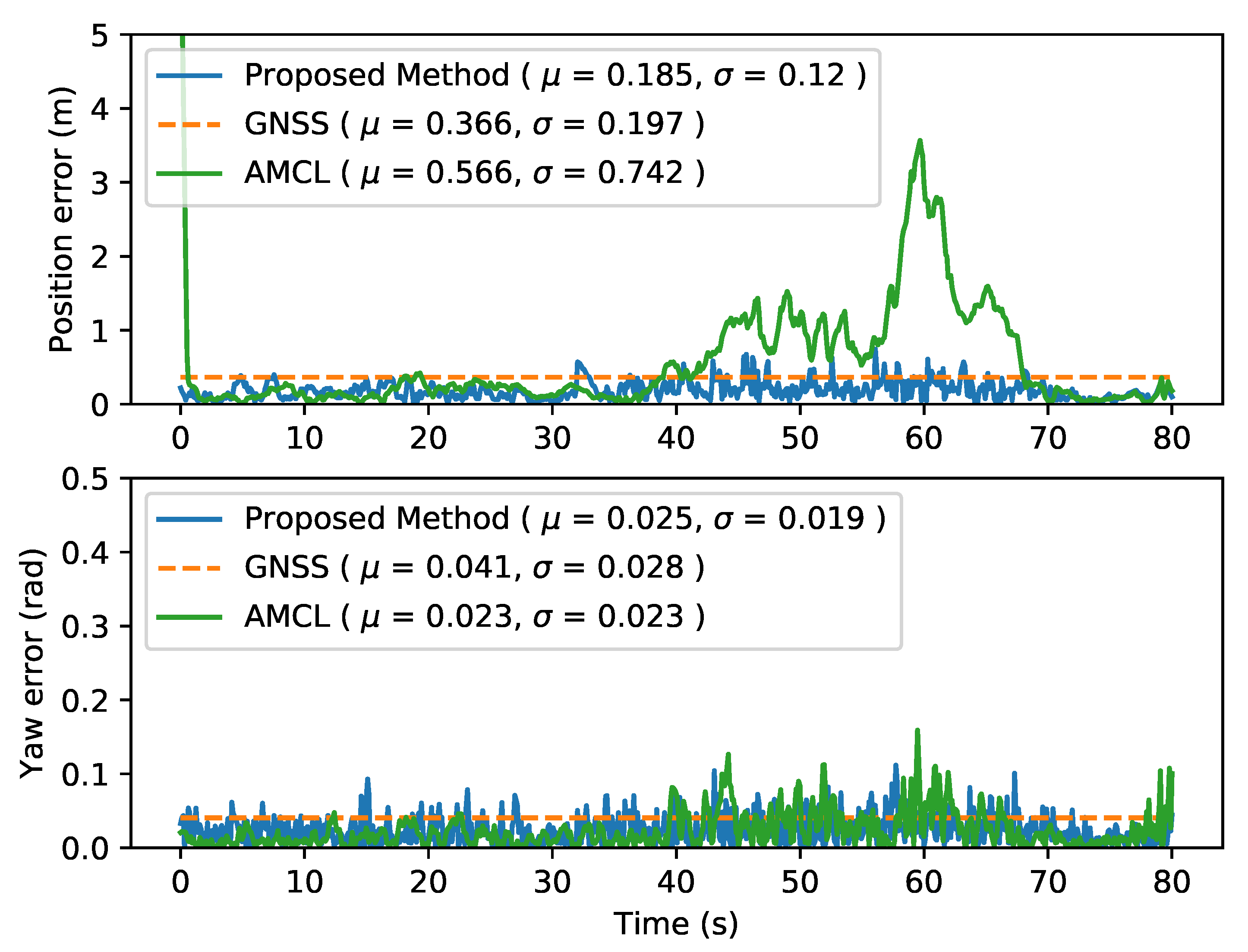
- Kalman filtered GNSS and IMU. As covariance of GNSS localization is set fixed, the mean error value is displayed for visualization purpose.
- AMCL original implementation.
- Proposed method, having the same odometry source as original AMCL and the same parameters configuration.
4.2. Empty Map
4.3. GNSS Challenging Scenarios
4.4. Mixed Environments
4.4.1. AMCL
4.4.2. GNSS
4.4.3. Proposed Method
4.5. Real Platform Qualitative Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Kuutti, S.; Fallah, S.; Katsaros, K.; Dianati, M.; Mccullough, F.; Mouzakitis, A. A survey of the state-of-the-art localization techniques and their potentials for autonomous vehicle applications. IEEE Internet Things J. 2018, 5, 829–846. [Google Scholar] [CrossRef]
- Karaim, M.; Elsheikh, M.; Noureldin, A. GNSS Error Sources. In Multifunctional Operation and Application of GPS; IntechOpen: London, UK, 2018. [Google Scholar]
- Huang, D.; Xiong, Y.; Yuan, L. Global Positioning System (GPS)-Theory and Practice; Xi’an Jiaotong University Press: Chengdu, Chain, 2006; pp. 71–73. [Google Scholar]
- Fox, D.; Burgard, W.; Dellaert, F.; Thrun, S. Monte carlo localization: Efficient position estimation for mobile robots. AAAI/IAAI 1999, 1999, 1–7. [Google Scholar]
- Gutmann, J.S.; Fox, D. An experimental comparison of localization methods continued. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; Volume 1, pp. 454–459. [Google Scholar]
- Martí, E.D.; Martín, D.; García, J.; De la Escalera, A.; Molina, J.M.; Armingol, J.M. Context-aided sensor fusion for enhanced urban navigation. Sensors 2012, 12, 16802–16837. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Obst, M.; Bauer, S.; Reisdorf, P.; Wanielik, G. Multipath detection with 3D digital maps for robust multi-constellation GNSS/INS vehicle localization in urban areas. In Proceedings of the 2012 IEEE Intelligent Vehicles Symposium, Alcala de Henares, Spain, 3–7 June 2012; pp. 184–190. [Google Scholar]
- Qin, H.; Xue, X.; Yang, Q. GNSS multipath estimation and mitigation based on particle filter. IET Radar Sonar Nav. 2019, 13, 1588–1596. [Google Scholar] [CrossRef]
- Ahn, K.; Kang, Y. A Particle Filter Localization Method Using 2D Laser Sensor Measurements and Road Features for Autonomous Vehicle. Int. J. Rail Transp. 2019, 2019, 1–11. [Google Scholar] [CrossRef]
- Sefati, M.; Daum, M.; Sondermann, B.; Kreisköther, K.D.; Kampker, A. Improving vehicle localization using semantic and pole-like landmarks. In Proceedings of the 2017 IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 13–19. [Google Scholar]
- Zhou, X.; Su, Z.; Huang, D.; Zhang, H.; Cheng, T.; Wu, J. Robust global localization by using global visual features and range finders data. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 218–223. [Google Scholar]
- Fentaw, H.W.; Kim, T.H. Indoor localization using magnetic field anomalies and inertial measurement units based on Monte Carlo localization. In Proceedings of the 2017 Ninth International Conference on Ubiquitous and Future Networks (ICUFN), Milan, Italy, 4–7 July 2017; pp. 33–37. [Google Scholar]
- Pfaff, P.; Burgard, W.; Fox, D. Robust monte-carlo localization using adaptive likelihood models. In Proceedings of the 1st European Robotics Symposium (EUROS-06), Palermo, Italy, 16–18 March 2006; pp. 181–194. [Google Scholar]
- Ueda, R.; Arai, T.; Sakamoto, K.; Kikuchi, T.; Kamiya, S. Expansion resetting for recovery from fatal error in monte carlo localization-comparison with sensor resetting methods. In Proceedings of the 2004 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (IEEE Cat. No. 04CH37566), Sendai, Japan, 28 September–2 October 2004; pp. 2481–2486. [Google Scholar]
- Goto, H.; Ueda, R.; Hayashibara, Y. Resetting Method using GNSS in LIDAR-based Probabilistic Self-localization. In Proceedings of the 2018 IEEE International Conference on Robotics and Biomimetics (ROBIO), Kuala Lumpur, Malaysia, 12–15 December 2018; pp. 1113–1118. [Google Scholar]
- Seow, Y.; Miyagusuku, R.; Yamashita, A.; Asama, H. Detecting and solving the kidnapped robot problem using laser range finder and wifi signal. In Proceedings of the 2017 IEEE international conference on real-time computing and robotics (RCAR), Okinawa, Japan, 14–18 July 2017; pp. 303–308. [Google Scholar]
- Lenser, S.; Veloso, M. Sensor resetting localization for poorly modelled mobile robots. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No. 00CH37065), San Francisco, CA, USA, 24–28 April 2000; pp. 1225–1232. [Google Scholar]
- Hentschel, M.; Wulf, O.; Wagner, B. A GPS and laser-based localization for urban and non-urban outdoor environments. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 149–154. [Google Scholar]
- Perea, D.; Morell, A.; Toledo, J.; Acosta, L. GNSS integration in the localization system of an autonomous vehicle based on Particle Weighting. IEEE Sens. J. 2019, 20, 3314–3323. [Google Scholar] [CrossRef]
- Geiger, A.; Lenz, P.; Stiller, C.; Urtasun, R. Vision meets Robotics: The KITTI Dataset. Int. J. Rob. Res. 2013, 32, 1231–1237. [Google Scholar] [CrossRef] [Green Version]
- Quigley, M.; Conley, K.; Gerkey, B.; Faust, J.; Foote, T.; Leibs, J.; Wheeler, R.; Ng, A.Y. ROS: An open-source Robot Operating System. In Proceedings of the ICRA Workshop on Open Source Software, Kobe, Japan, 12–17 May 2009. [Google Scholar]
- Moore, T.; Stouch, D. A Generalized Extended Kalman Filter Implementation for the Robot Operating System. In Proceedings of the 13th International Conference on Intelligent Autonomous Systems (IAS-13), Padua, Italy, 15–18 July 2014; pp. 335–348. [Google Scholar]
- Wan, E.A.; Van Der Merwe, R. The unscented Kalman filter for nonlinear estimation. In Proceedings of the IEEE 2000 Adaptive Systems for Signal Processing, Communications, and Control Symposium (Cat. No. 00EX373), Lake Louise, AB, Canada, 4 October 2000; pp. 153–158. [Google Scholar]
- Bresson, G.; Alsayed, Z.; Yu, L.; Glaser, S. Simultaneous localization and mapping: A survey of current trends in autonomous driving. IEEE Trans. Intell. Veh. 2017, 2, 194–220. [Google Scholar] [CrossRef] [Green Version]
- Balasuriya, B.; Chathuranga, B.; Jayasundara, B.; Napagoda, N.; Kumarawadu, S.; Chandima, D.; Jayasekara, A. Outdoor robot navigation using Gmapping based SLAM algorithm. In Proceedings of the 2016 Moratuwa Engineering Research Conference (MERCon), Moratuwa, Sri Lanka, 5–6 April 2016; pp. 403–408. [Google Scholar]
- Marti, E.; de Miguel, M.A.; Garcia, F.; Perez, J. A Review of Sensor Technologies for Perception in Automated Driving. IEEE Intell. Transp. Syst. Mag. 2019, 11, 94–108. [Google Scholar] [CrossRef]
- Milošević, M.; Stefanović, M. Performance Loss Due to Atmospheric Noise and Noisy Carrier Reference Signal in Qpsk Communication Systems. Elektron. ir Elektrotechnika 2005, 58, 5–9. [Google Scholar]
- Thrun, S.; Burgard, W.; Fox, D. Probabilistic Robotics; MIT Press: Cambridge, UK, 2000. [Google Scholar]
- Burgard, W.; Stachniss, C.; Bennewitz, M.; Grisetti, G.; Arras, K. Introduction to Mobile Robotics. Available online: http://domino.informatik.uni-freiburg.de/teaching/ss13/robotics/slides/12-pf-mcl.pdf (accessed on 1 June 2020).
- de Miguel, M.A.; Moreno, F.M.; Garcia, F.; Armingol, J.M. Autonomous vehicle architecture for high automation. In Proceedings of the International Conference on Computer Aided Systems Theory, Las Palmas de Gran Canaria, Spain, 17–22 February 2019; pp. 145–152. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Odometry model | differential |
| Laser model | likelihood filed |
| Max particles | 2000 |
| Max beams | 360 |
| Method | Position Mean (m) | Position Std (m) | Yaw Mean | Yaw Std |
|---|---|---|---|---|
| Proposed | 0.513 | 0.856 | 0.033 | 0.025 |
| AMCL | 0.566 | 0.742 | 0.023 | 0.023 |
| GNSS Mean (m) | Position Mean (m) | Position Std (m) | Yaw Mean | Yaw Std |
|---|---|---|---|---|
| 0.127 | 0.141 | 0.137 | 0.015 | 0.016 |
| 0.374 | 0.186 | 0.11 | 0.028 | 0.024 |
| 1.256 | 0.367 | 1.767 | 0.029 | 0.129 |
| 6.256 | 0.496 | 1.963 | 0.023 | 0.116 |
| 12.600 | 0.554 | 2.115 | 0.026 | 0.151 |
| 37.581 | 0.593 | 2.495 | 0.032 | 0.196 |
| AMCL | Robot kidnapped error | |||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Miguel, M.Á.; García, F.; Armingol, J.M. Improved LiDAR Probabilistic Localization for Autonomous Vehicles Using GNSS. Sensors 2020, 20, 3145. https://doi.org/10.3390/s20113145
de Miguel MÁ, García F, Armingol JM. Improved LiDAR Probabilistic Localization for Autonomous Vehicles Using GNSS. Sensors. 2020; 20(11):3145. https://doi.org/10.3390/s20113145
Chicago/Turabian Stylede Miguel, Miguel Ángel, Fernando García, and José María Armingol. 2020. "Improved LiDAR Probabilistic Localization for Autonomous Vehicles Using GNSS" Sensors 20, no. 11: 3145. https://doi.org/10.3390/s20113145
APA Stylede Miguel, M. Á., García, F., & Armingol, J. M. (2020). Improved LiDAR Probabilistic Localization for Autonomous Vehicles Using GNSS. Sensors, 20(11), 3145. https://doi.org/10.3390/s20113145