Multiple-Target Homotopic Quasi-Complete Path Planning Method for Mobile Robot Using a Piecewise Linear Approach

 ,
,  , ,
, ,  , ,
, ,
Abstract
1. Introduction
1.1. Planning Algorithms
- Planners classified according to its completeness are: (I) Complete. These algorithms can find one solution, if it exists; otherwise, reports a failure. The most common algorithms in this category are visibility graph, Voronoi diagrams, Delaunay triangulations, among others graph based planners [12,13,14,15]. (II) Semi-complete. These algorithms can find a solution if one exists; otherwise, it may run forever while a stop criterion is not reached. The most relevant planners in this category are the method of artificial potential fields (APF) [6,16,17,18] and homotopic path planning method (HPPM) [10,19,20,21]. (III) Resolution complete. For any algorithm in this category; the completeness is strongly related to the resolution, size, and shape of the cells in the grid. Here, if a solution exists, any of these algorithms can obtain one; otherwise, terminates and reports that no solution exists for the specified resolution. All planners in this category are based on a cell decomposition which uses a search algorithm to find the collision-free path. The most used search algorithms are Dijkstra’s, A*, the local current comparison, and any of its variants [22,23,24,25,26,27,28]. (IV) Probabilistically complete. The degree of completeness for any algorithm in this category is considered probabilistic, because, if a solution exists, the probability tends to one hundred percent as long as the number of iterations of this process tends to infinity. The most effective algorithms, in this category, are the sampling-based planners (SBP).
- Planners classified according to its formulation or approach are: graph-based, cells-decomposition, artificial potential fields, sampling-based, and homotopy continuation methods. (a) Graph-based contains algorithms for whose their roadmap is modeled by a graph and a search algorithm is employed to obtain the valid path. (b) Cells decomposition contains all discrete-space based algorithms, generally, these are the best choice to obtain a valid path for maze-type environments. Nevertheless, for non-structured environments, its performance depends on the resolution of the grid. (c) Artificial potential fields contains little variants of the original method, in this classification a random optimization or another technique is implemented to deal with the local minimum problem. (d) Sampling-based contains all probabilistic-complete algorithms such as: probabilistic road maps (PRM) [7,29], expansive spaces trees (EST) [30], rapidly-exploring random trees (RRT) [3,7,31], bidirectional RRT (Bi-RRT, also named RRT-Connect) [32], RRT combined with a shortest path approach A (RRT*) [7], kynodinamic motion planning by interior-exterior cells of exploration (KPIECE) [1], and collision checking efficient algorithms (LazyPRM and LazyRRT) [33,34] which have the common modules; uniform distribution samples generator, collision checker, local planner, and smoothing post-processing algorithm [2,3,35]. (e) Homotopy continuation based planners are a new category that contains some variants of the original method introduced in Reference [19]. These variants have been proposed to improve performance, minimize computation time, and obtain the shortest path (reported in References [10,20,36,37]).
- Planners are classified according to their ability to reuse pre-processed data for solving problems into: (a) single-query and (b) multiple-query. In this way, the algorithms and methods mentioned previously, as well as their variants, fall in one of these categories. On the one hand, multiple-query algorithms are commonly applied to solve static environments and the roadmap generated can be reused as many times as needed. Therefore, queries are very fast, nevertheless, the computational cost and time to generate the roadmap are impractical for dynamic environments; algorithms like PRM and graph-based (Visibility graphs and A*) have this property. On the other hand, for single-query planners, roadmap generation and extend function are developed in parallel to reduce the high computational cost of analyzing the entire environment. This characteristic makes these algorithms faster, nevertheless, the resulting roadmap is only useful for the current query. Some algorithms contained in this category are RRT, EST, KPIECE, artificial potential fields method, HPPM, among others (see Table 1).
1.2. Multiple-Target Path Planning
2. Homotopic Path Planning Method
- For , the trivial or known solution is obtained.
- For , one solution of the original system is found.
- The homotopy curve is formed by the set of intersection points between the equations in the homotopy system (2), that is, . Where, represents the set of intersections and is denoted, commonly, by [19,47,48,49]. Furthermore, all solutions of the original system are included in ; these are found during the continuous deformation at .
3. Homotopy Path Tracking Scheme
3.1. Euler’s Predictor Scheme
3.2. Broyden’s Method as Corrector Scheme
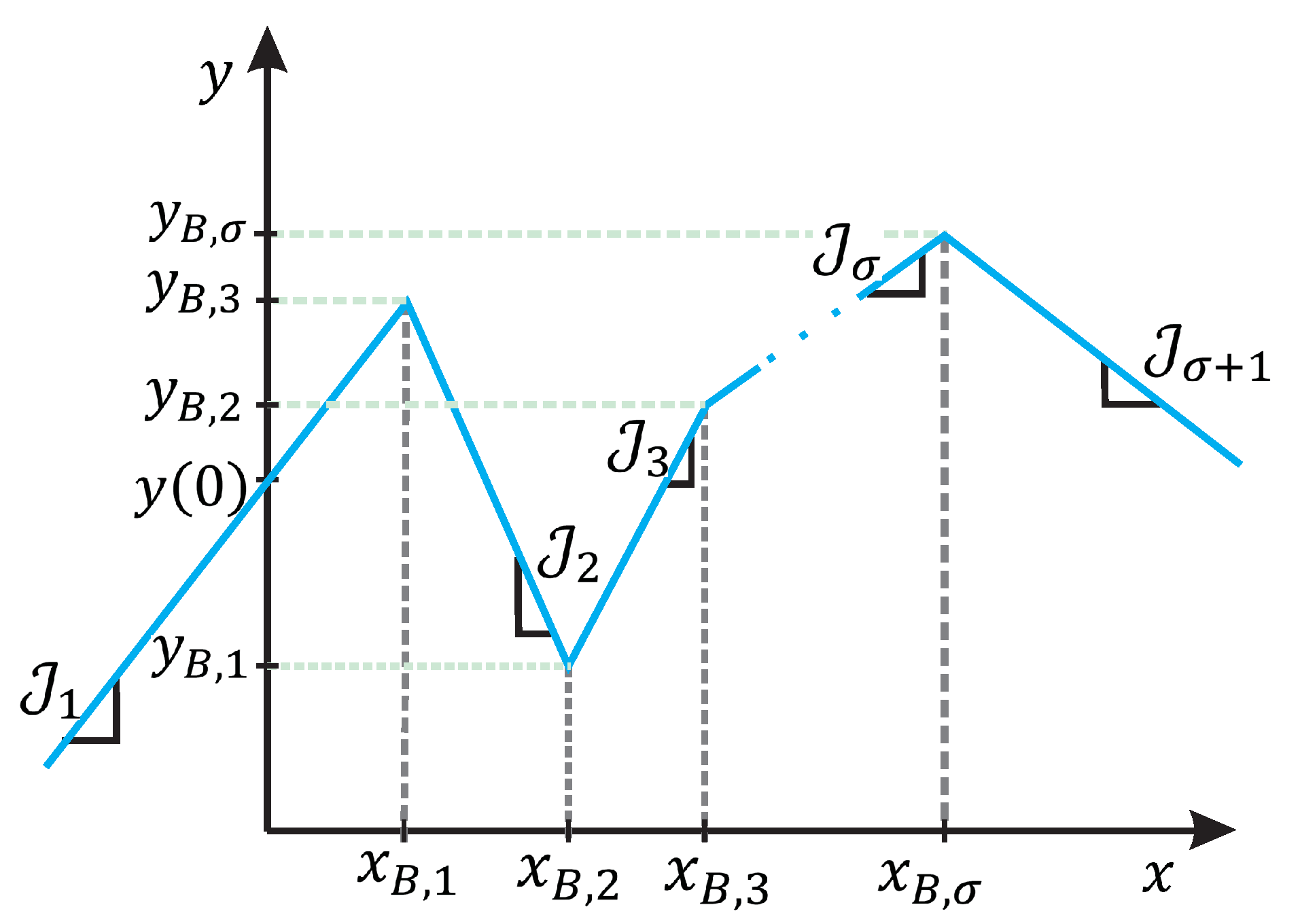
4. Canonical Piecewise Linear Representation
5. Multiple-Target Homotopic Path Planning Method
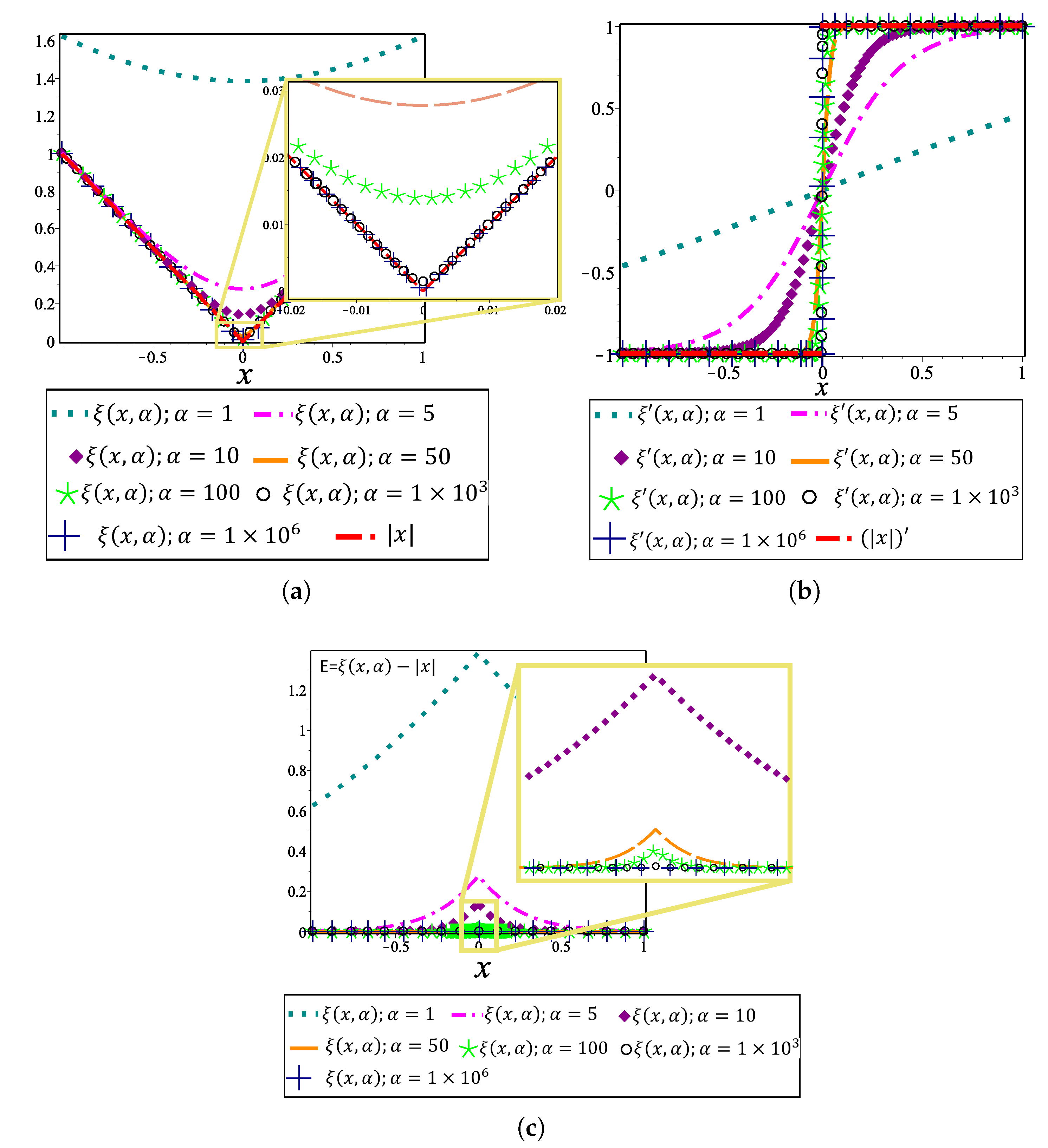
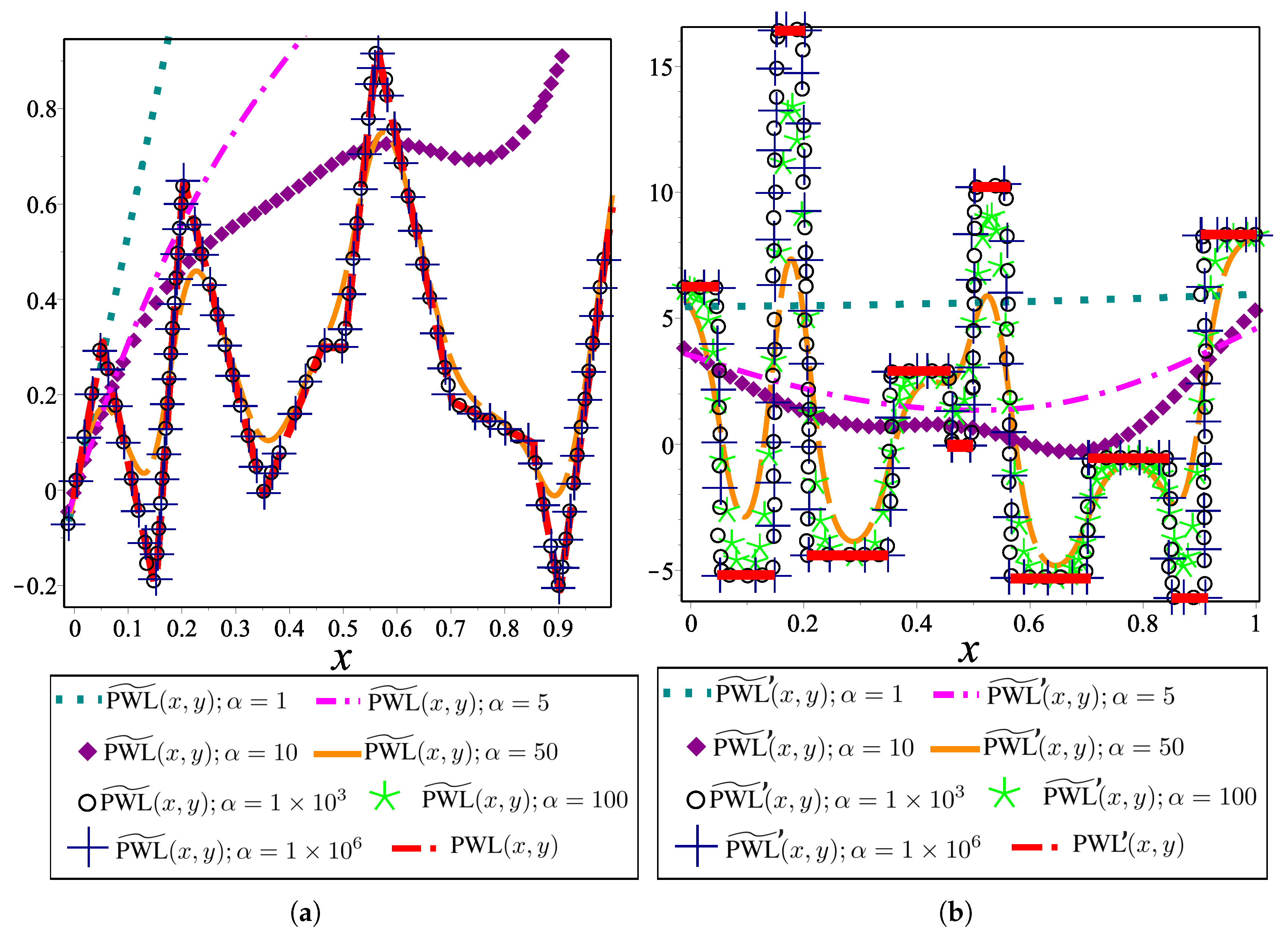
5.1. Approximation of Absolute Value Function to Improve the Piecewise Linear Approach
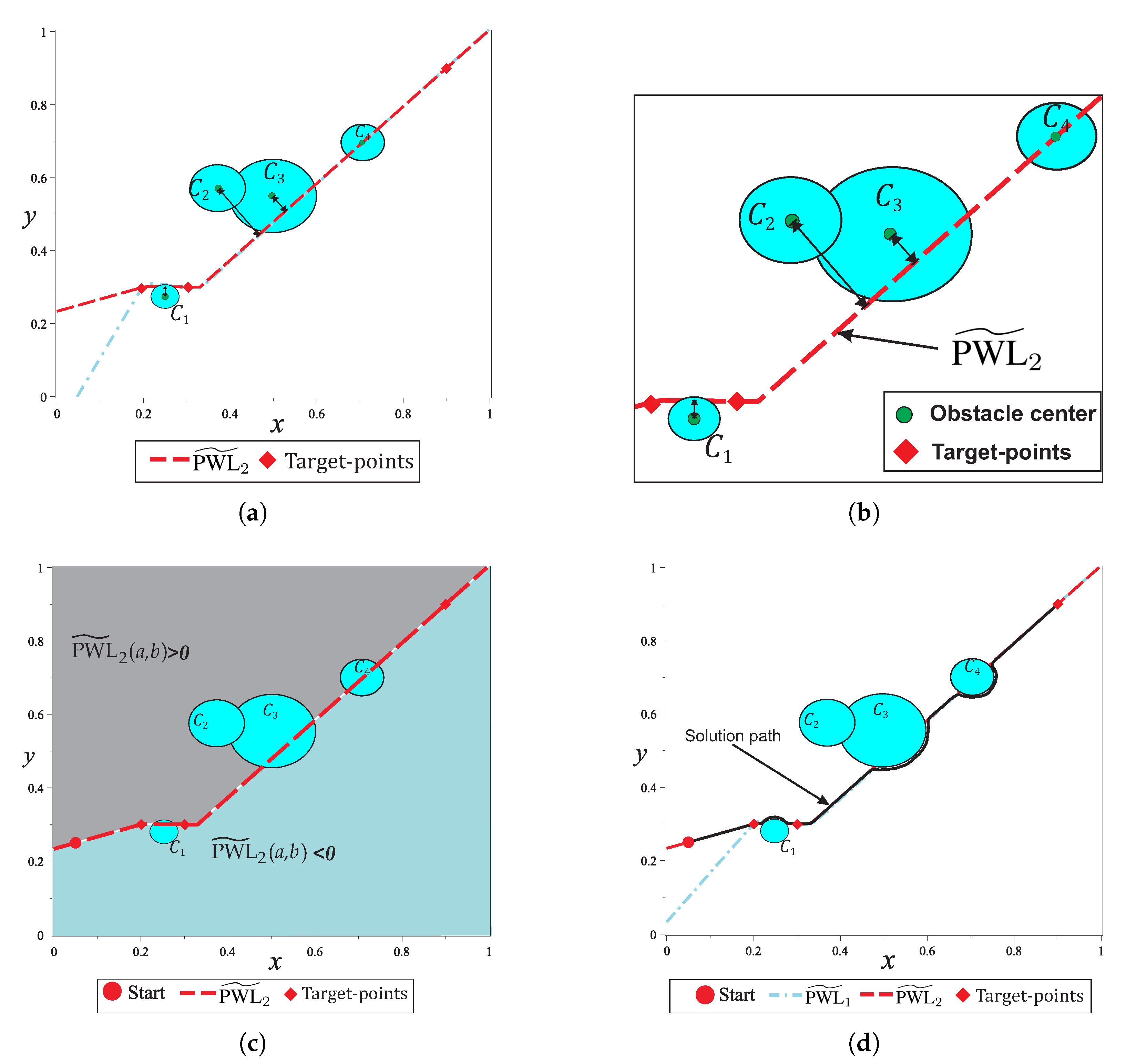
5.2. Breakpoints Selection for the Piecewise-Linear Functions
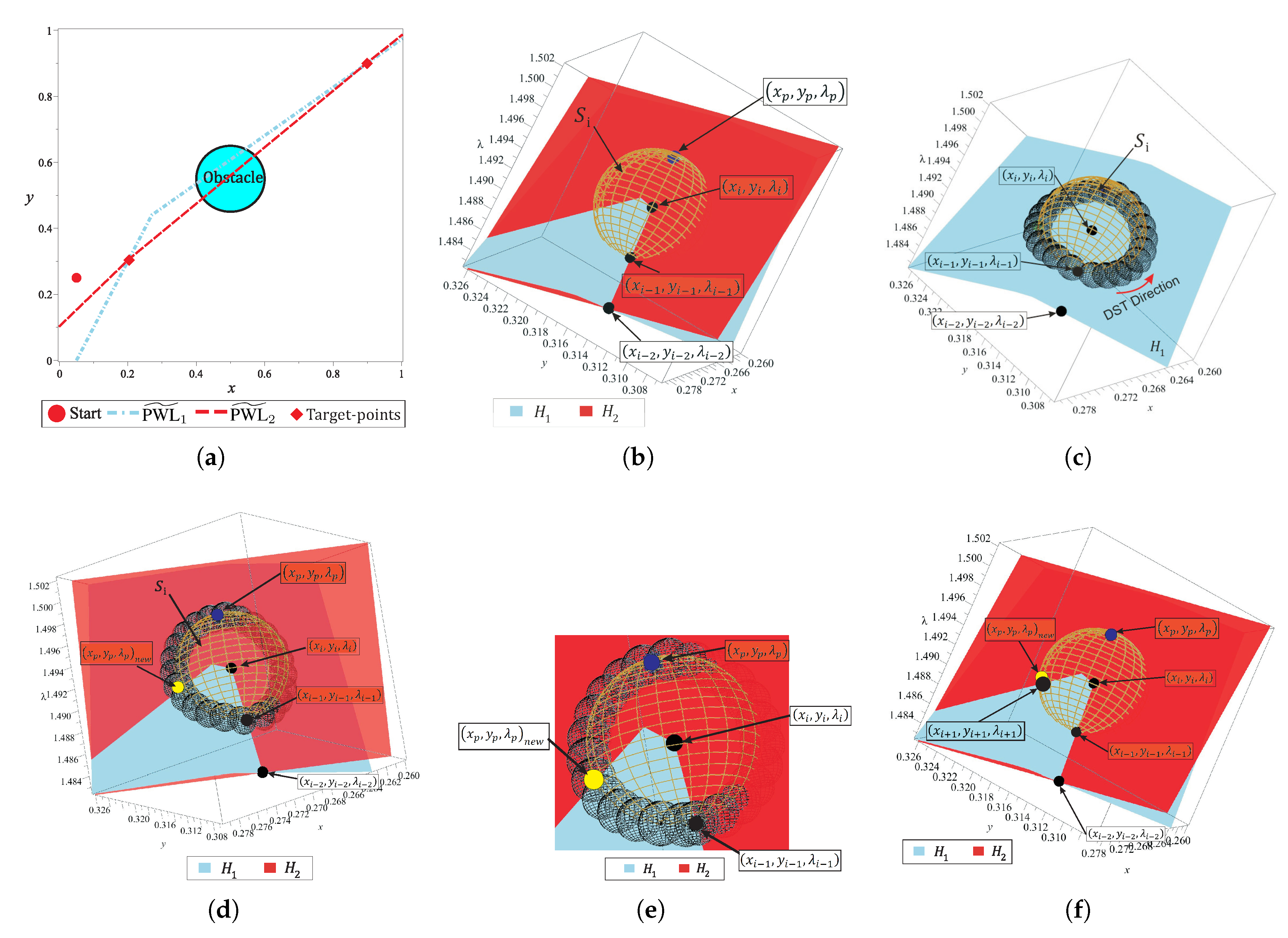
5.3. Technique for Successful Convergence and Avoid Reversal Effect
- The system of equations is established from , , and the sphere . DST has been formulated to track the curve of intersection between and using the SA algorithm.where , n is the number of DST steps; is the radius, and is the center of the sphere for every k-th step of the DST.
- The SA algorithm is executed using the predictor and corrector schemes, explained above, for the non-linear system of Equation (39). Figure 10c depicts the schematic operation of DST; it can be noticed that the procedure starts at point and continues until its initial point is reached, it means that DST tracks a closed curve. It is important to note that the system of Equation (39) are easier to track with less computation cost than the system of Equation (15). For his paper, the DST stop criterion is based on the distance between initial point of DST procedure and the current DST solution ashere, the radius of DST sphere is proposed as , where is the radius of the sphere of the spherical tracking. is the minimum number of steps of DST which is set to 24.
- Finally, all points , except , are evaluated in Equation (15). Then, the point for which the evaluation is closer to zero, , is taken as a new predictor in the SA tracking of . Figure 10d shows the new predictor point which is a point from the solution set . Figure 10e provides a closer view where is close to the intersection between , and . Then, this point is taken as the predictor point in the Broyden’s corrector scheme. The position of the new point can be seen in Figure 10f.
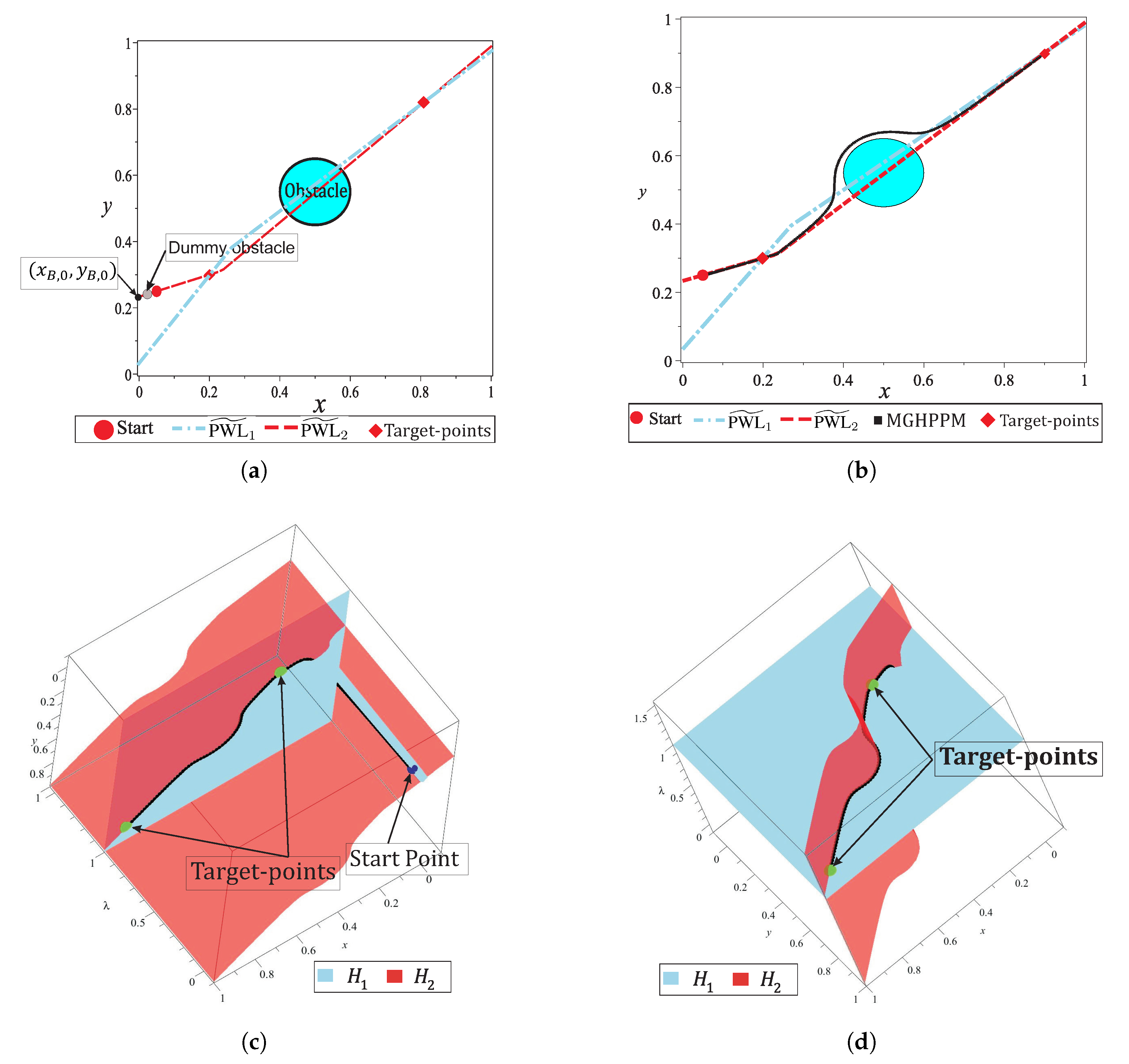
5.4. A Dummy Obstacle to Improve the Spherical Algorithm Performance
5.5. Strategy to Simplified the Jacobian Matrix Based on Symbolic Manipulation
- From Equations (34) and (33)where and arewhere is the expression that describes the shape of the i-th obstacle; for a circular obstacle, and for an ellipsoidal obstacle. The parameter is the repulsion parameter of each obstacle; for a circular obstacle, and for an ellipsoidal obstacle.where, . Finally,
5.6. A Systematic Criterion to Select the Repulsion Parameter
6. Multiple-Target Homotopic Path Planning Method with Visibility Graph Approach
7. Case Studies
7.1. Case 1
7.2. Case 2
7.3. Case 3
7.4. Case 4
7.5. Case 5
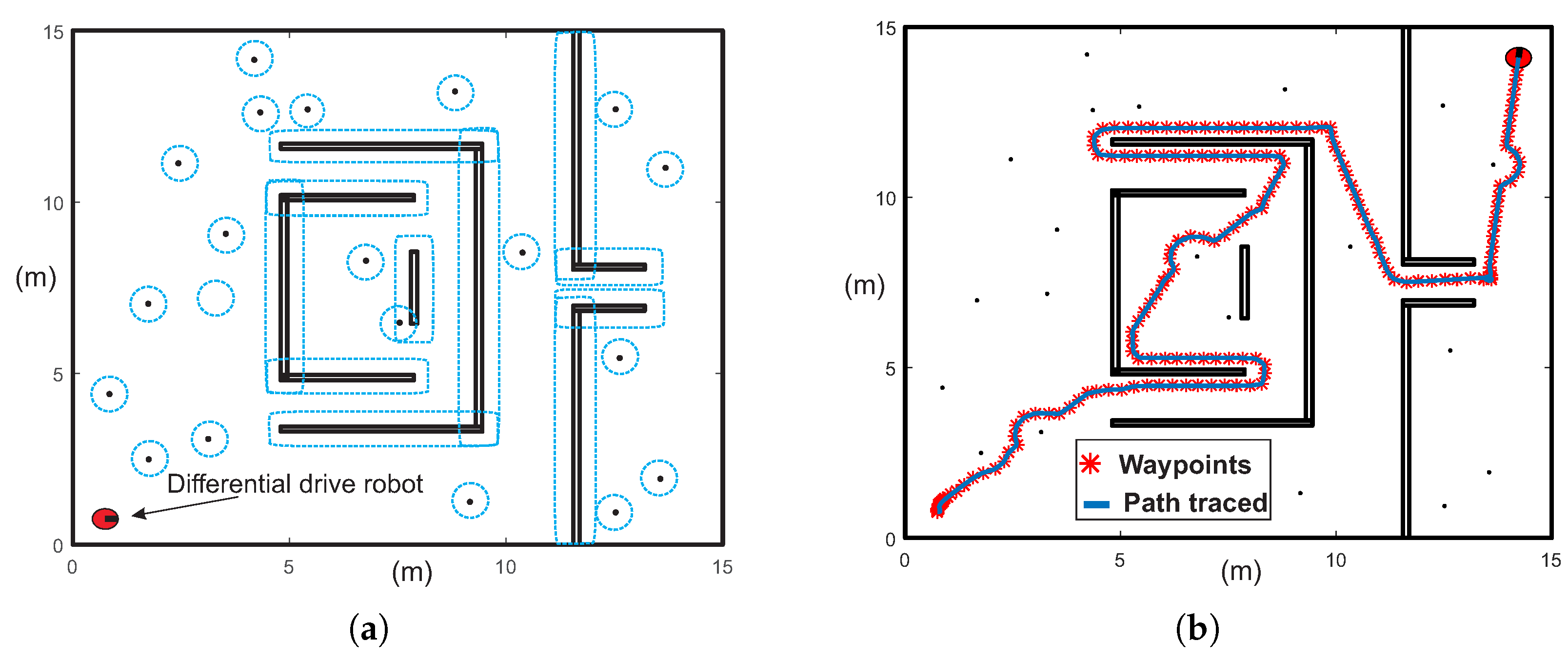
8. Pure-Pursuit Controller Using Matlab Robotics System Toolbox
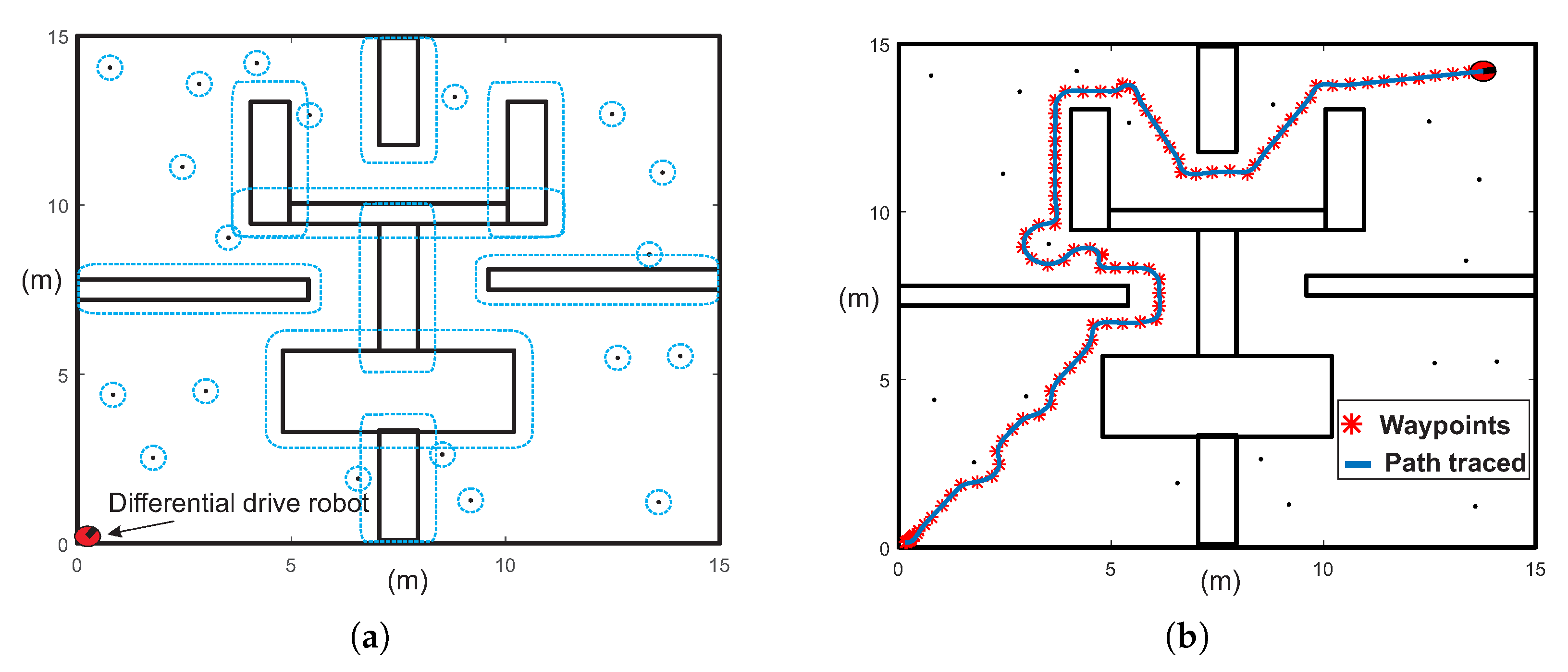
- The dimensions of the environment map are 15 m × 15 m.
- Robot radius is 0.25 m.
- Look-ahead distance is 0.5 m.
- Linear velocity is 0.5 .
- Maximum angular velocity is .
9. Discussion
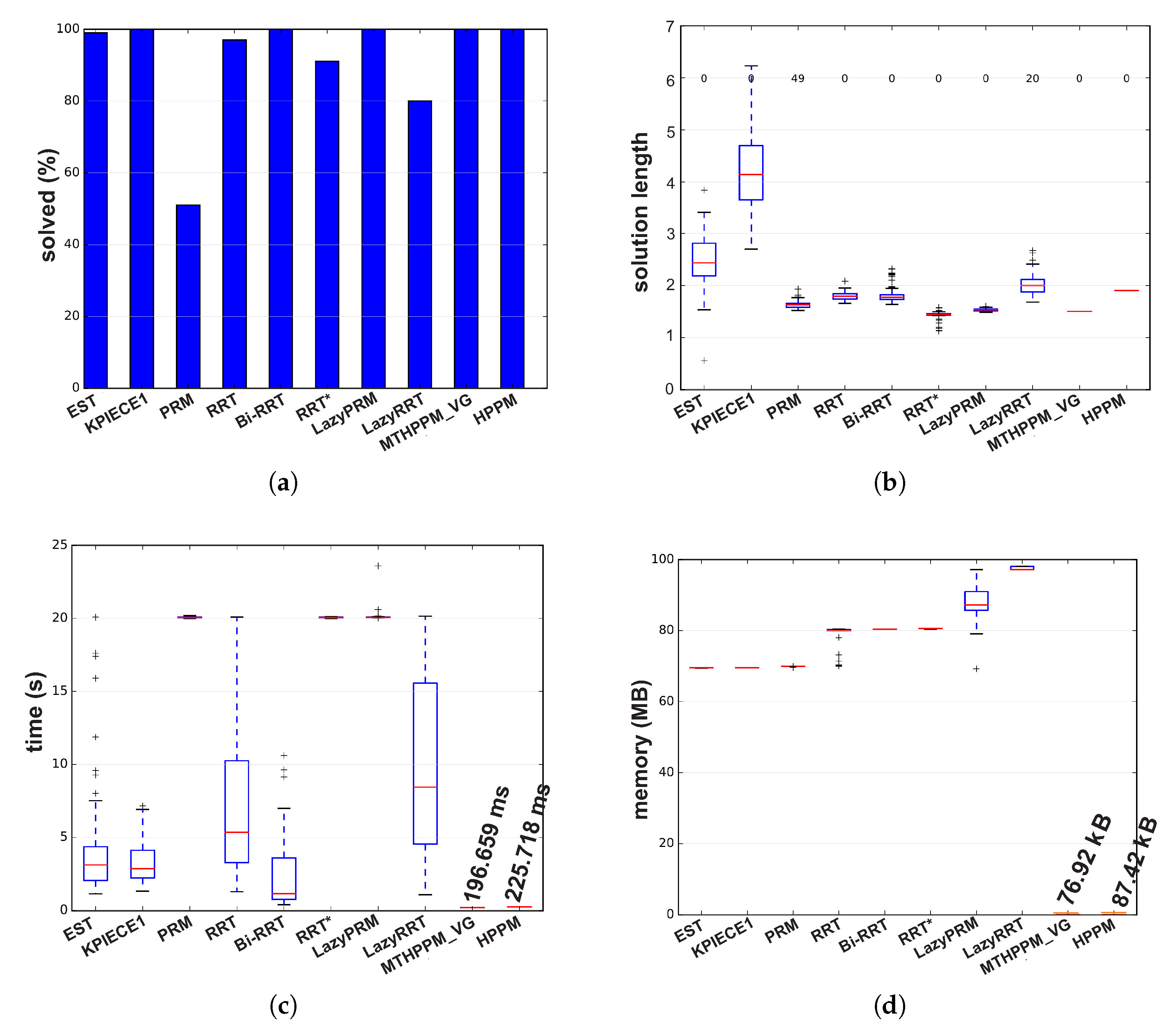
- A novel NAES formulation based on smooth PWL auxiliary functions () generated from and approximation of absolute values function is presented. This formulation allows generating a multiple-target planner scheme, the MTHPPM, which uses the ability of the continuation homotopy to find more than one solution. Furthermore, the ’s provides a scheme without mathematical discontinuities due to the integration of approximation of absolute value on the PWL formulation. For this scheme, the targets can be set by the user or using an automatic process, as explained in the case studies. Furthermore, this formulation does not imply a significant increase in execution time or memory consumption respect to original HPPM.
- A dummy obstacle scheme to reduce the number of steps needed to generate a successful path was proposed. This scheme generates a modification in one of the homotopy surfaces, which reduces the distance of the solution path (points of intersection between homotopy surfaces). The effect of a dummy obstacle has a great impact on the number of steps in the procedure of homotopy based planner (HPPM and MTHPPM), thus, the execution time is significantly reduced.
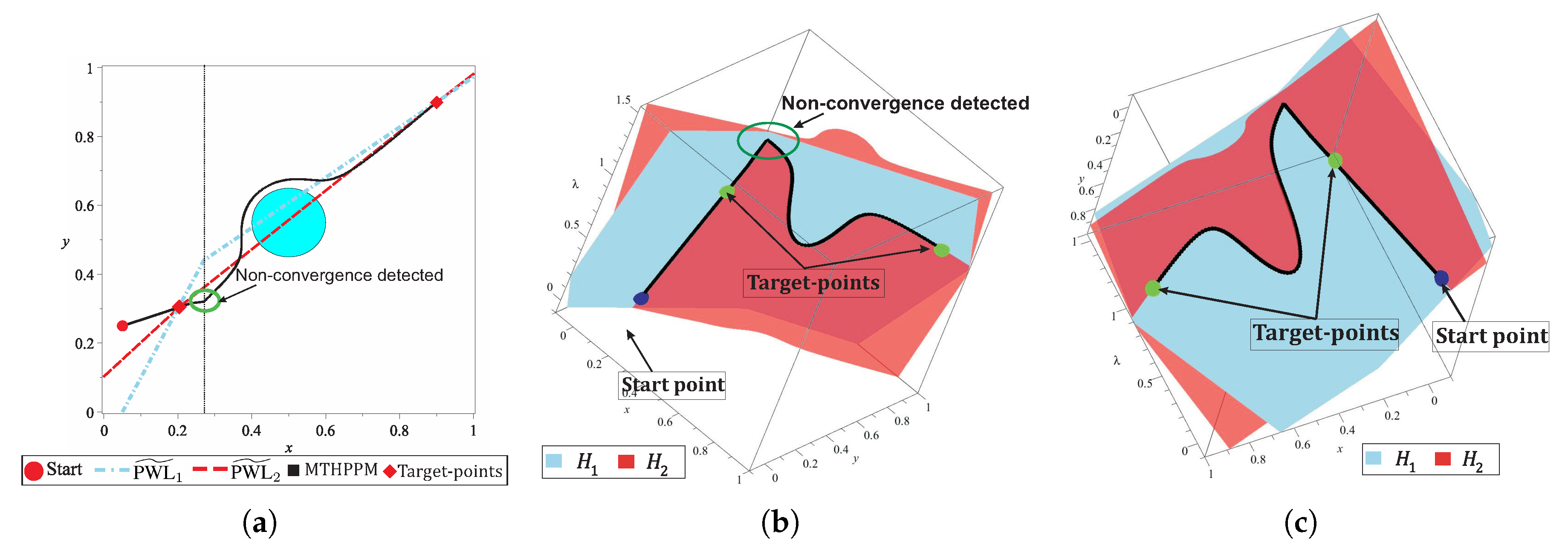
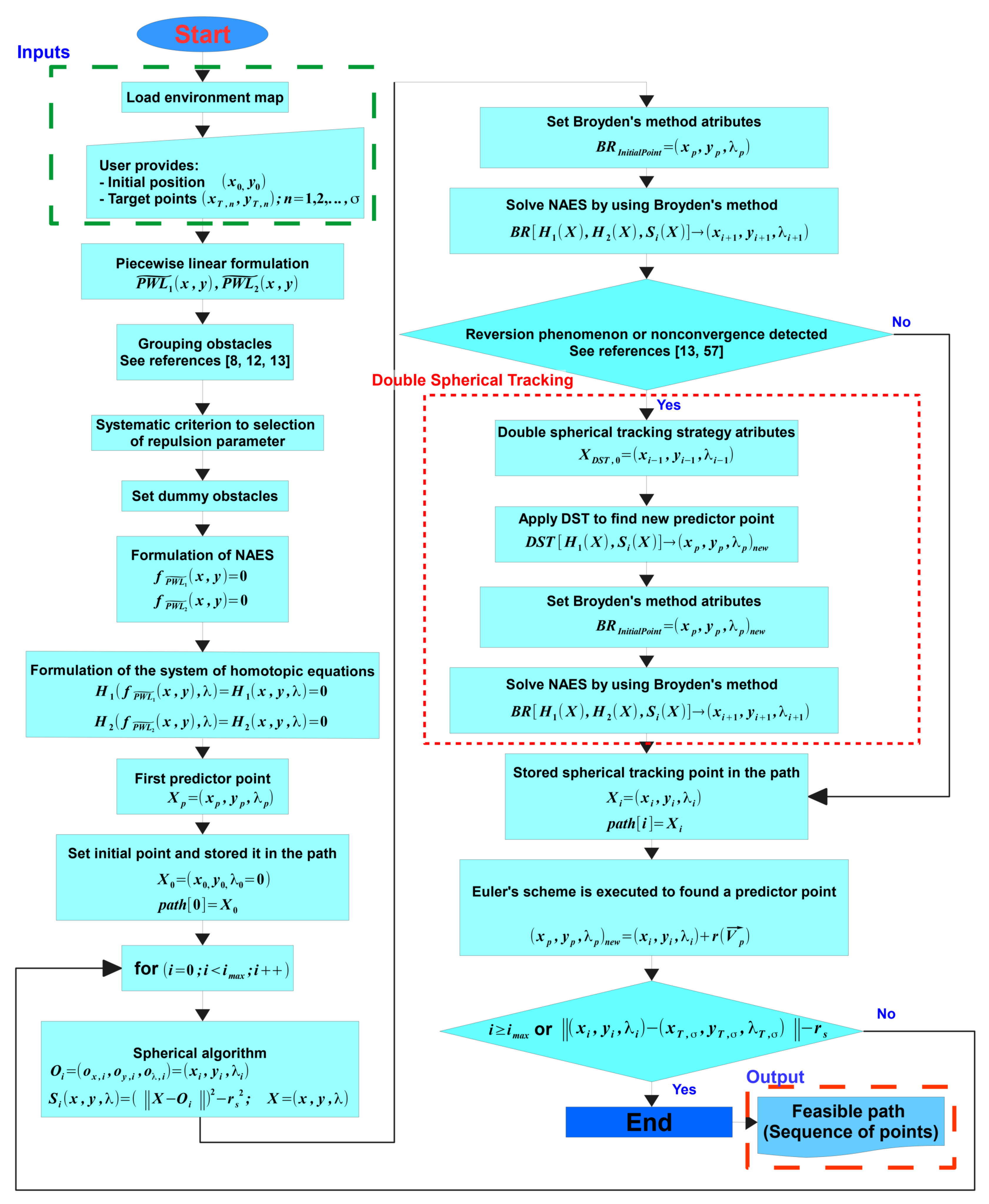
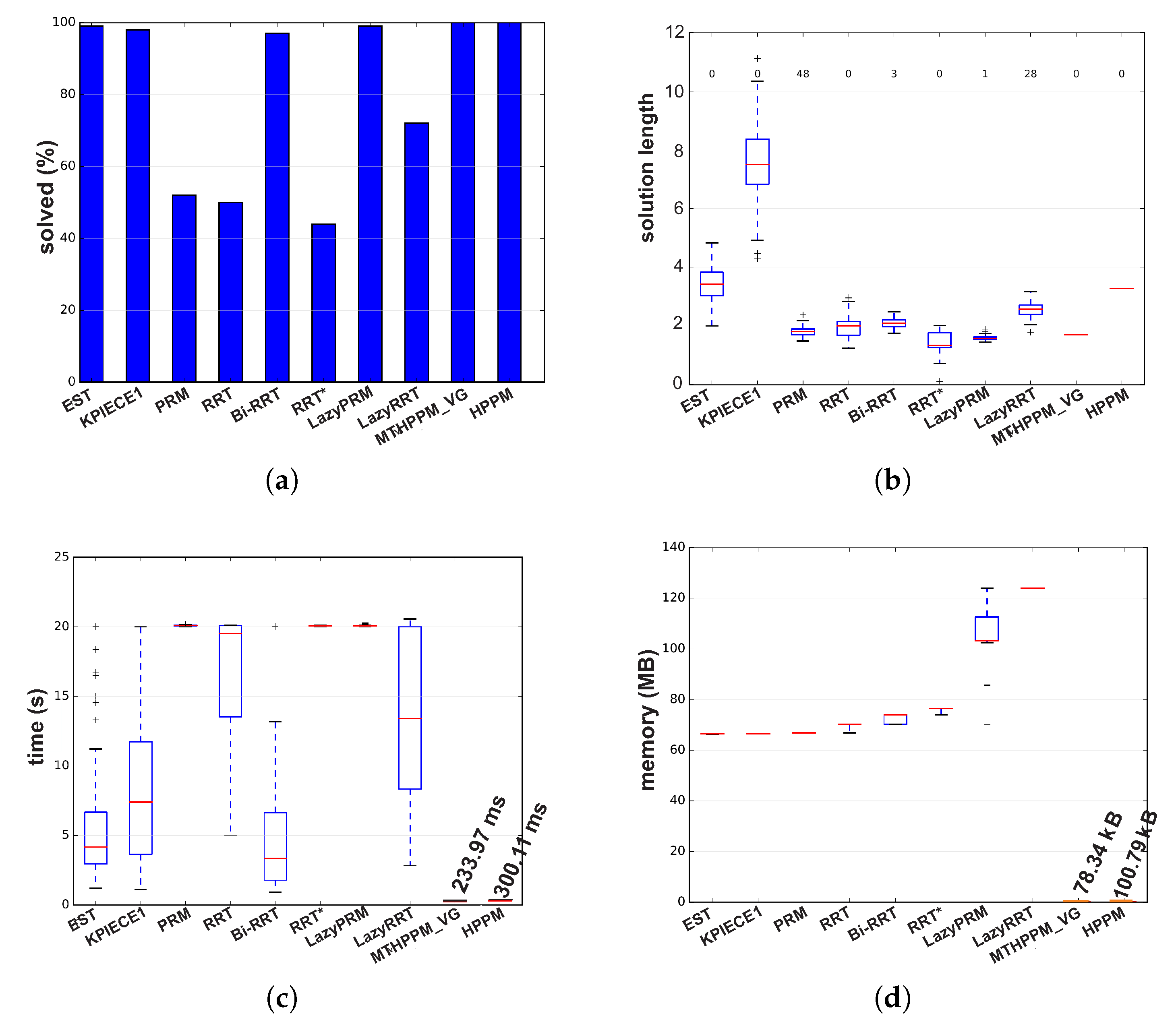
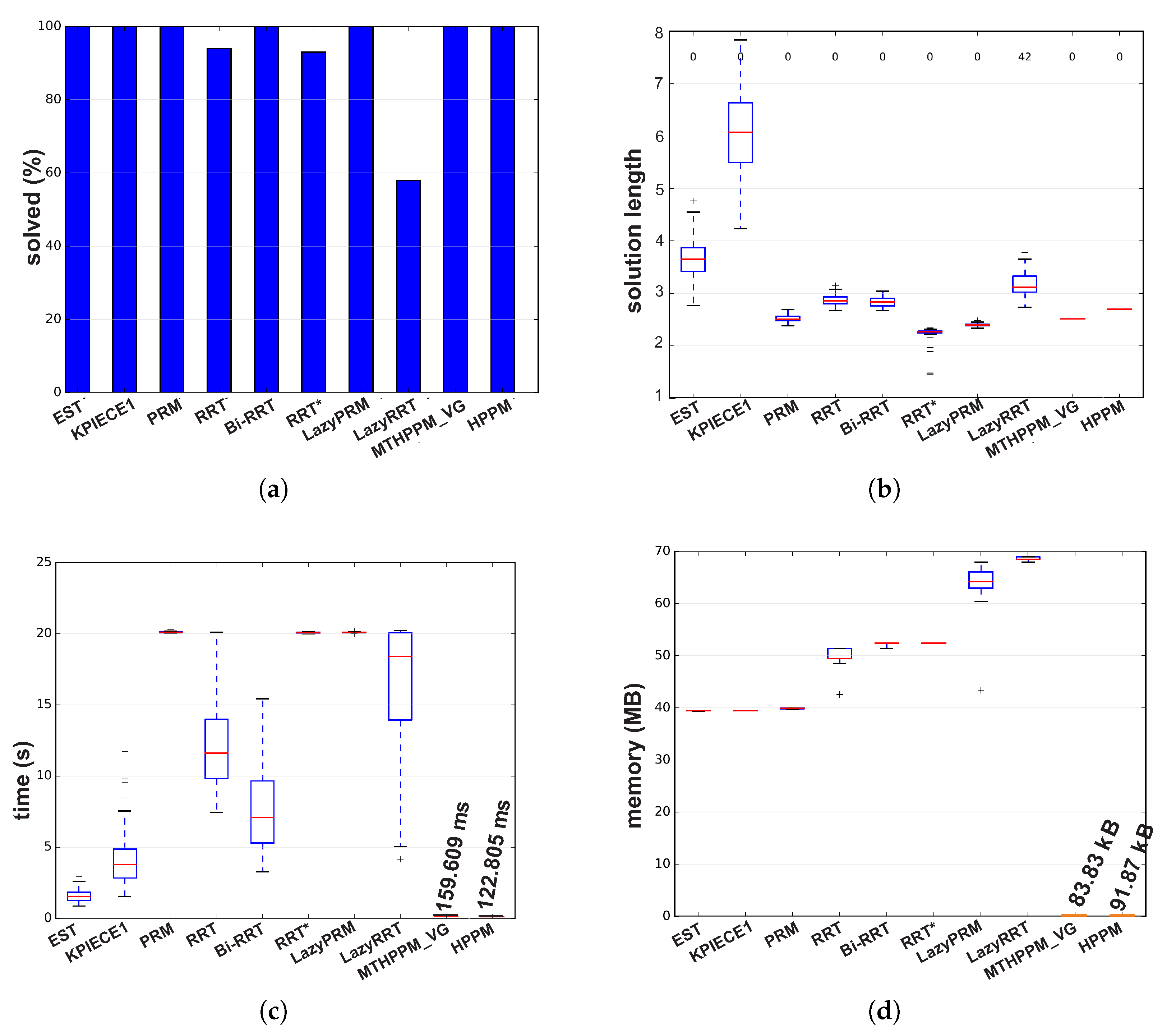
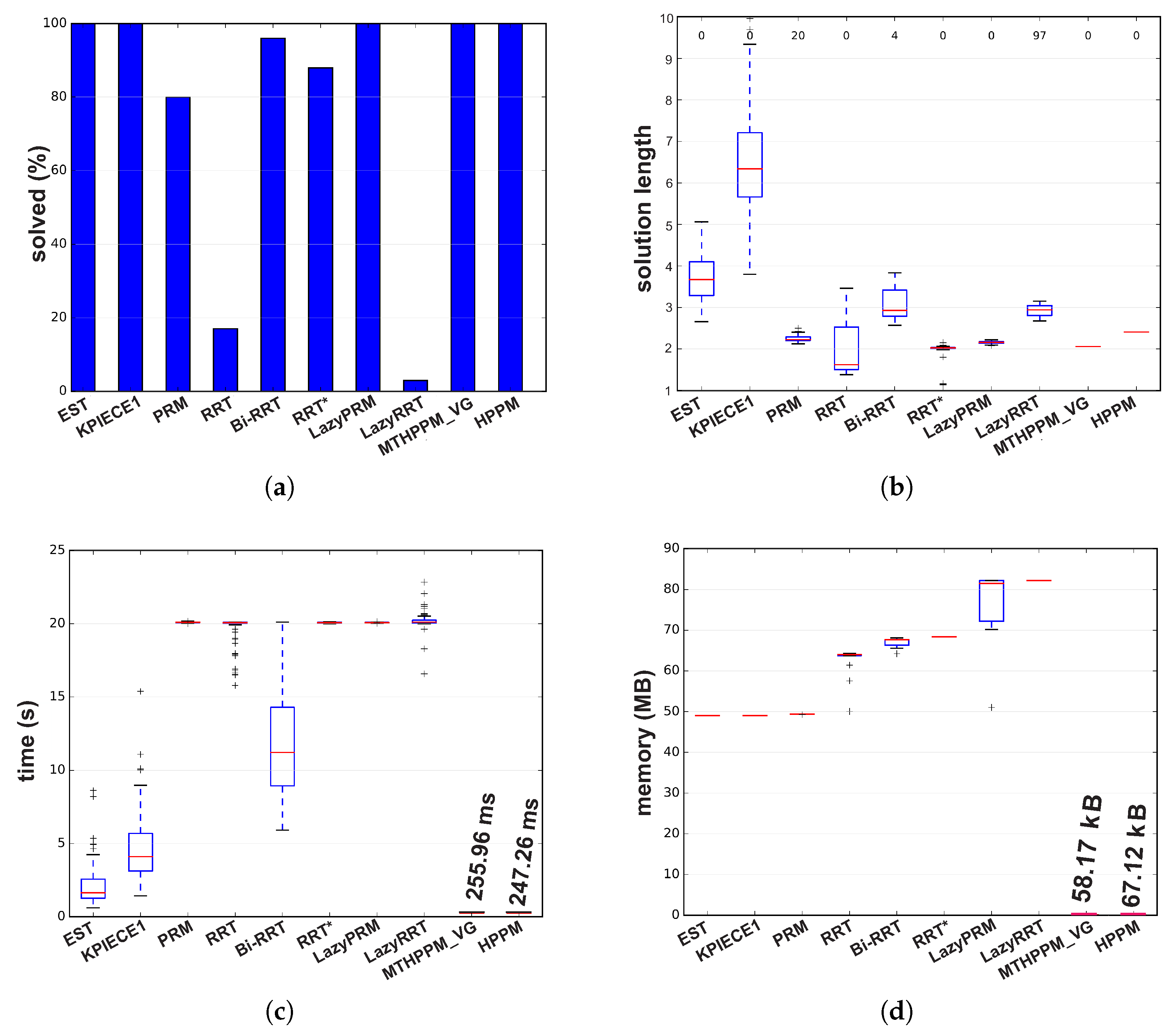
- The operation of the technique to solve the reversal phenomenon, found in spherical tracking, named double spherical tracking (DST) is presented and explained in Section 5.3. This technique also can be applied to improve the convergence of SA when the corrector scheme (Broyden’s method) fails. The effectiveness of this technique is validated by numerical simulations presented in Section 7, in which, DST technique allowed the continuation of path planning. Table 2 presents the issues (reversal phenomena and non-convergences of corrector scheme), steps in which were detected, and a total of steps (number of points in the path) for case studies 1–4. These data validate the effectiveness of DST technique to solve the reversal phenomenon and enhance the convergence of HPPM and MTHPPM (MTHPPM_VG). The non-convergence and reversal effect issues during the iterative HPPM and MTHPPM processes for case studies 1–4 were between 0.082–0.633% of the total steps, that is, the impact over the execution time and memory consumption is hardly noticeable. It is important to remark that, although MTHPPM (MTHPPM_VG) is more susceptible to non-convergence and reversal effect issues than HPPM because of its formulation, the implementation of multiple-target strategy reduces the number of SA steps and enhance the homotopy path (in terms of length).
- Automatic assignation of sign and magnitude of repulsion parameter for circular obstacles is introduced in Section 5.6. This formulation optimizes paths length because it forces the homotopy curves to stay close at the direct trajectory.
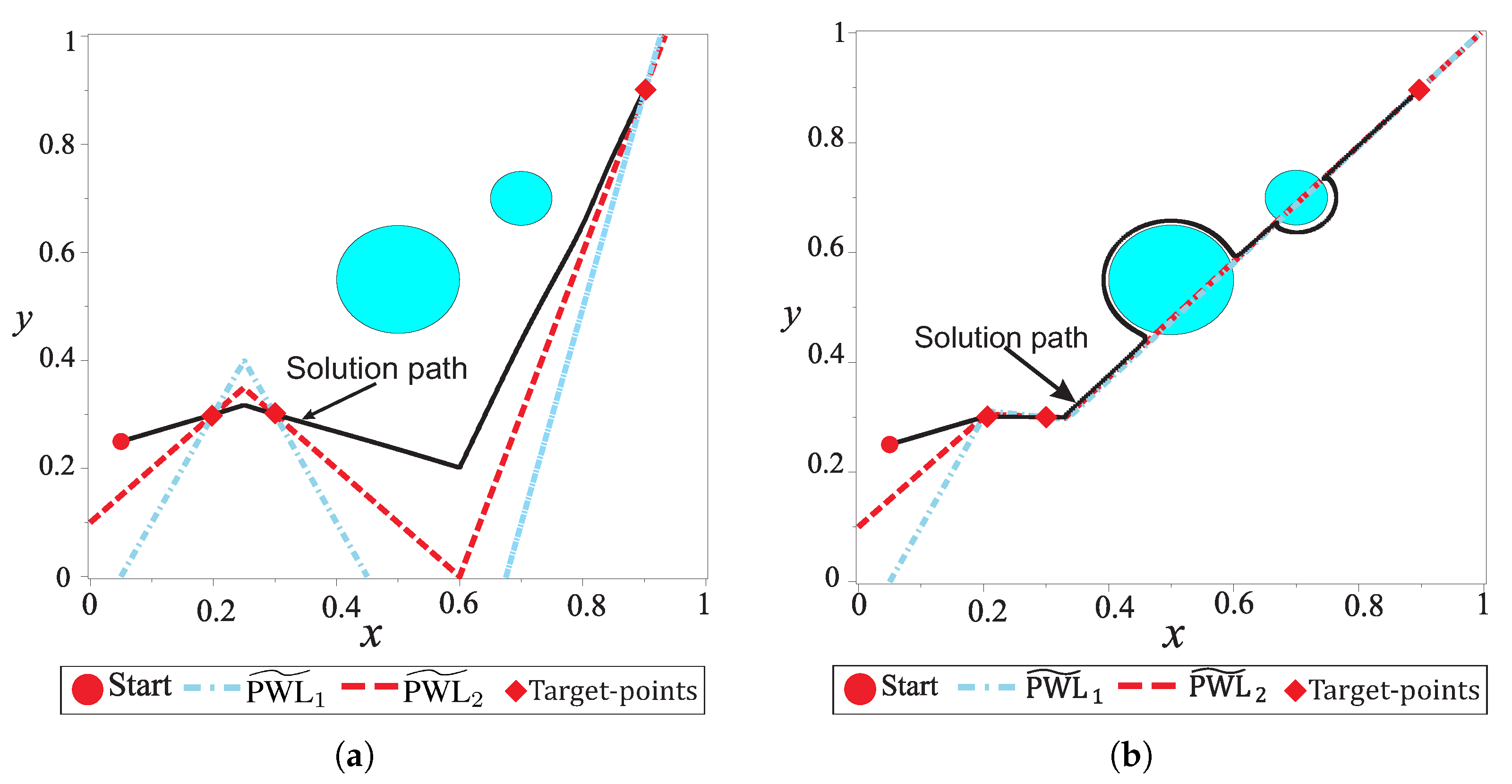
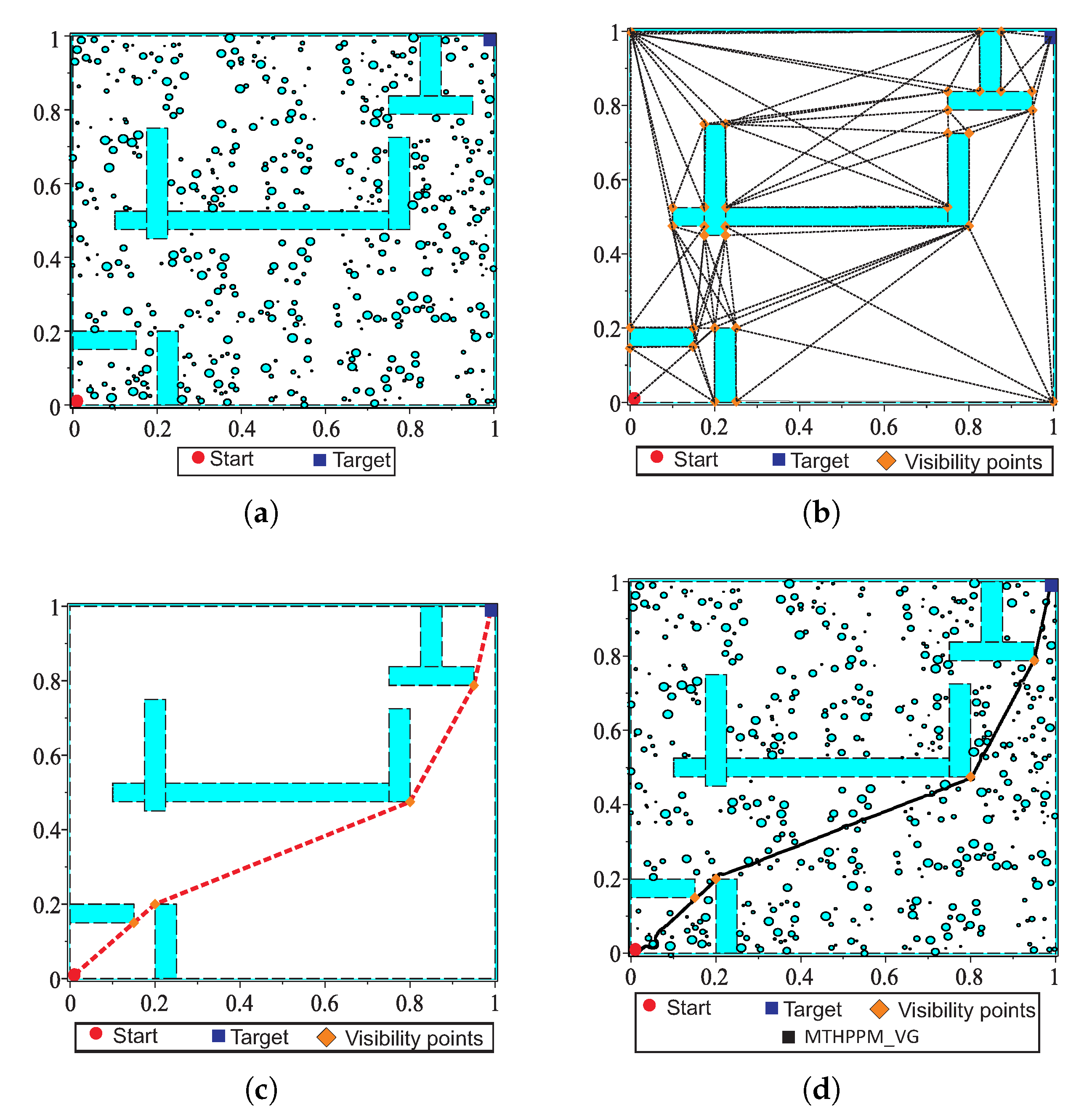
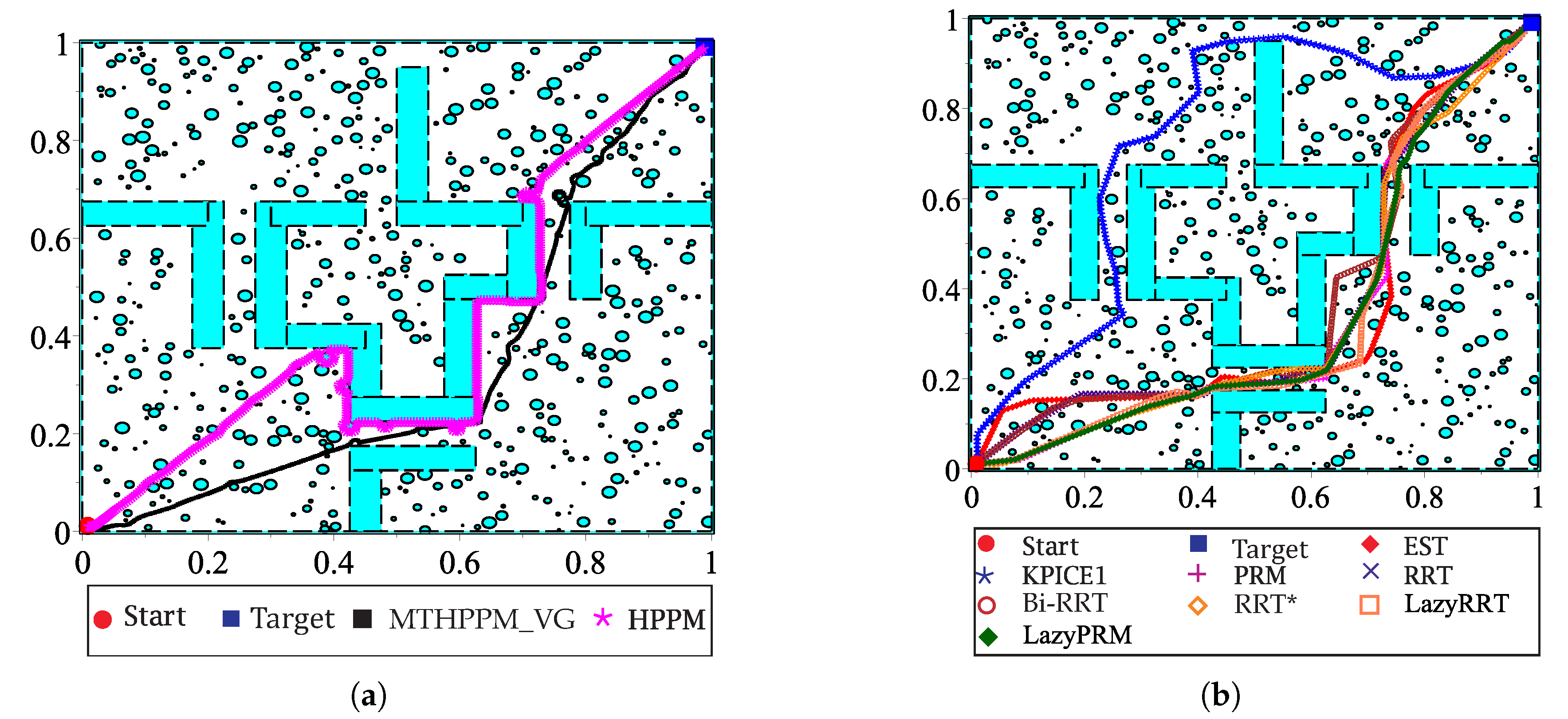
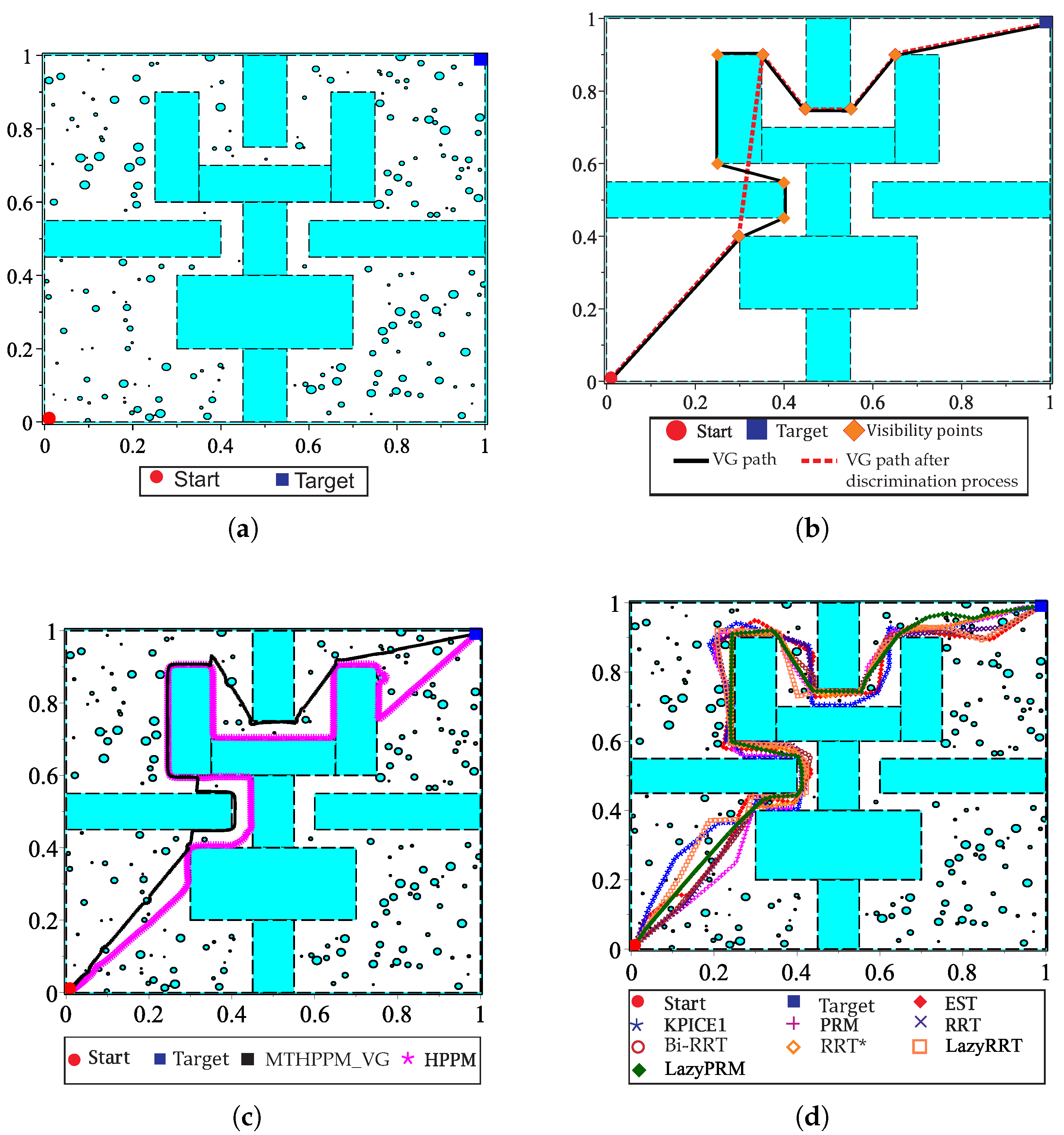
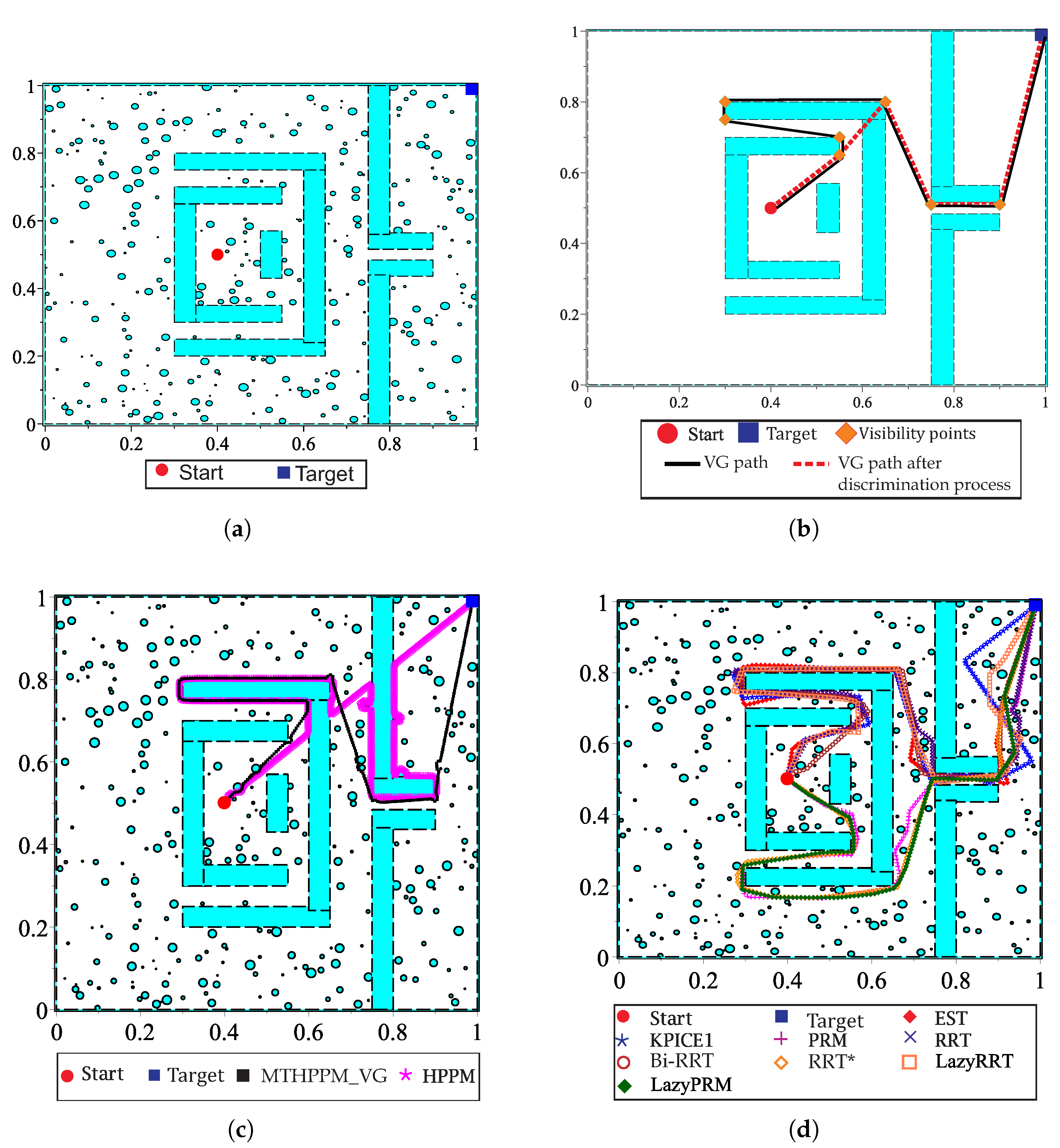
- The multiple-target HPPM with visibility graph approach is provided in Section 6. For this method, a first approximation of the path is obtained by visibility graphs algorithm considering only walls in the environment, then, the visibility points (nodes of visibility graph path) are taken as targets by MTHPPM and solve the entire map for all obstacles and walls. This approach offers the best of both methods (Visibility graph and MTHPPM): (a) Shortest path (from visibility graph), (b) low time and memory consumption (from MTHPPM), and (c) ability to find the solution path if it exists (from the combination of MTHPPM and VG).
- The symbolic manipulation of the Jacobian matrix proposed in this work is employed to simplify the complexity of the homotopy based planner implementations. This strategy allows a fast evaluation of the Jacobian matrix in the predictor and corrector schemes (process implicit at each SA step). Furthermore, this strategy avoids the use of specialized mathematical libraries and packages and provides an easy and cheap (in terms of memory) implementation in any programmable platform.
- The feasibly of paths obtained with the MTHPPM and HPPM to be executed by a differential drive robot model is shown in Section 8. The simulations presented here proved that homotopy paths have a great compatibility with the pure-pursuit scheme due to the smoothness of the paths. Furthermore, Figure 28b and Figure 29b showed, visually, that difference between homotopy path (waypoints) and traced path (using pure-pursuit controller) is very small. It implies that the homotopy planner does not need an additional stage of post-processing due to the smoothness of the paths, unlike the SBP algorithms which need an additional process to simplify the path found [2,3,7,8,9,10].
10. Conclusions and Future Work
Author Contributions
Funding
Conflicts of Interest
References
- Şucan, I.A.; Kavraki, L.E. A Sampling-Based Tree Planner for Systems with Complex Dynamics. IEEE Trans. Robot. 2012, 28, 116–131. [Google Scholar] [CrossRef]
- Elbanhawi, M.; Simic, M. Sampling-Based Robot Motion Planning: A Review. IEEE Access 2014, 2, 56–77. [Google Scholar] [CrossRef]
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006; Available online: http://planning.cs.uiuc.edu/ (accessed on 29 March 2019).
- Kalamian, N.; Niri, M.F.; Mehrabizadeh, H. Design of a Suboptimal Controller based on Riccati Equation and State-dependent Impulsive Observer for a Robotic Manipulator. In Proceedings of the 2019 6th International Conference on Control, Instrumentation and Automation (ICCIA), Sanandaj, Iran, 30–31 October 2019; pp. 1–6. [Google Scholar]
- Xunyu, Z.; Jun, T.; Huosheng, H.; Xiafu, P. Hybrid Path Planning Based on Safe A* Algorithm and Adaptive Window Approach for Mobile Robot in Large-Scale Dynamic Environment. J. Intell. Robot. Syst. 2020, 1–13. [Google Scholar] [CrossRef]
- Patle, B.K.; Pandey, A.; Parhi, D.; Jagadeesh, A. A review: On path planning strategies for navigation of mobile robot. Def. Technol. 2019, 15, 582–606. [Google Scholar] [CrossRef]
- Karaman, S.; Frazzoli, E. Sampling-based Algorithms for Optimal Motion Planning. Int. J. Rob. Res. 2011, 30, 846–894. [Google Scholar] [CrossRef]
- Al-Bluwi, I.; Siméon, T.; Cortés, J. Motion planning algorithms for molecular simulations: A survey. Comput. Sci. Rev. 2012, 6, 125–143. [Google Scholar] [CrossRef]
- Kleinbort, M.; Salzman, O.; Halperin, D. Collision Detection or Nearest-Neighbor Search? On the Computational Bottleneck in Sampling-Based Motion Planning. CoRR 2016. Available online: http://xxx.lanl.gov/abs/1607.04800 (accessed on 16 March 2019).
- Diaz-Arango, G.; Vázquez-Leal, H.; Hernandez-Martinez, L.; Pascual, M.T.S.; Sandoval-Hernandez, M. Homotopy Path Planning for Terrestrial Robots Using Spherical Algorithm. IEEE Trans. Autom. Sci. Eng. 2017, 15, 567–585. [Google Scholar] [CrossRef]
- Sharma, K.; Doriya, R. Path planning for robots: An elucidating draft. Int. J. Intell. Robot. Appl. 2020. [Google Scholar] [CrossRef]
- Nguyet, T.T.N.; Hoai, T.V.; Thi, N.A. Some Advanced Techniques in Reducing Time for Path Planning Based on Visibility Graph. In Proceedings of the 2011 Third International Conference on Knowledge and Systems Engineering, Hanoi, Vietnam, 14–17 October 2011; pp. 190–194. [Google Scholar]
- Tran, N.; Nguyen, D.T.; Vu, D.L.; Truong, N.V. Global path planning for autonomous robots using modified visibility-graph. In Proceedings of the 2013 International Conference on Control, Automation and Information Sciences (ICCAIS), Ho Chi Minh City, Vietnam, 25–28 November 2013; pp. 317–321. [Google Scholar]
- Jan, G.E.; Sun, C.C.; Tsai, W.C.; Lin, T.H. An O(nlogn) Shortest Path Algorithm Based on Delaunay Triangulation. IEEE/ASME Trans. Mechatron. 2014, 19, 660–666. [Google Scholar] [CrossRef]
- Foskey, M.; Garber, M.; Lin, M.C.; Manocha, D. A Voronoi-based hybrid motion planner. In Proceedings of the 2001 IEEE/RSJ International Conference on Intelligent Robots and Systems, Expanding the Societal Role of Robotics in the the Next Millennium (Cat. No.01CH37180), Maui, HI, USA, 29 October–3 November 2001; Volume 1, pp. 55–60. [Google Scholar]
- Lee, M.C.; Park, M.G. Artificial potential field based path planning for mobile robots using a virtual obstacle concept. Adv. Intell. Mechatron. IEEE/ASME Int. Conf. 2003, 2, 735–740. [Google Scholar]
- Laue, T.; Rofer, T. A behavior architecture for autonomous mobile robots based on potential fields. In RoboCup 2004: Robot Soccer World Cup VIII; Springer: Berlin/Heidelberg, Germany, 2005; pp. 122–133. [Google Scholar]
- Rimon, E.; Koditschek, D.E. Exact robot navigation using artificial potential functions. IEEE Trans. Robot. Autom. 1992, 8, 501–518. [Google Scholar] [CrossRef]
- Vazquez-Leal, H.; Marin-Hernandez, A.; Khan, Y.; Yildirim, A.; Filobello-Nino, U.; Castaneda-Sheissa, R.; Jimenez-Fernandez, V. Exploring collision-free path planning by using homotopy continuation methods. Appl. Math. Comput. 2013, 219, 7514–7532. [Google Scholar] [CrossRef]
- Diaz-Arango, G.; Sarmiento-Reyes, A.; Hernandez-Martinez, L.; Vazquez-Leal, H.; Lopez-Hernandez, D.D.; Marin-Hernandez, A. Path optimization for terrestrial robots using Homotopy Path Planning Method. In Proceedings of the 2015 IEEE International Symposium on Circuits and Systems (ISCAS), Lisbon, Portugal, 24–27 May 2015; pp. 2824–2827. [Google Scholar]
- De Cos-Cholula, H.E.; Diaz-Arango, G.U.; Hernandez-Martinez, L.; Vazquez-Leal, H.; Sarmiento-Reyes, A.; Sanz-Pascual, M.T.; Herrera-May, A.L.; Castaneda-Sheissa, R. FPGA Implementation of Homotopic Path Planning Method with Automatic Assignment of Repulsion Parameter. Energies 2020, 13, 2623. [Google Scholar] [CrossRef]
- Wang, H.; Yu, Y.; Yuan, Q. Application of Dijkstra algorithm in robot path-planning. In Proceedings of the 2011 Second International Conference on Mechanic Automation and Control Engineering, Hohhot, China, 15–17 July 2011; pp. 1067–1069. [Google Scholar]
- Koziol, S.; Hasler, P.; Stilman, M. Robot path planning using Field Programmable Analog Arrays. In Proceedings of the 2012 IEEE International Conference on Robotics and Automation, St Paul, MN, USA, 14–19 May 2012; pp. 1747–1752. [Google Scholar]
- Kopřiva, S.; Šišlák, D.; Pavlíček, D.; Pěchouček, M. Iterative accelerated A* path planning. In Proceedings of the 49th IEEE Conference on Decision and Control (CDC), Atlanta, GA, USA, 15–17 December 2010; pp. 1201–1206. [Google Scholar]
- Soltani, A.; Tawfik, H.; Goulermas, J.; Fernando, T. Path planning in construction sites: Performance evaluation of the Dijkstra, A*, and GA search algorithms. Adv. Eng. Inform. 2002, 16, 291–303. [Google Scholar] [CrossRef]
- Saian, P.O.N.; Suyoto; Pranowo. Optimized A-Star algorithm in hexagon-based environment using parallel bidirectional search. In Proceedings of the 2016 8th International Conference on Information Technology and Electrical Engineering (ICITEE), Yogyakarta, Indonesia, 5–6 October 2016; pp. 1–5. [Google Scholar]
- Qiang, L.; Haibao, W.; Yan, Z.; Jingchang, H. Research on path planning of mobile robot based on improved ant colony algorithm. Neural Comput. Appl. 2019, 32, 1555–1566. [Google Scholar]
- Reinoso, O.; Wu, S.; Du, Y.; Zhang, Y. Mobile Robot Path Planning Based on a Generalized Wavefront Algorithm. Math. Probl. Eng. Hindawi 2020, 2020, 6798798. [Google Scholar]
- Kavraki, L.E.; Svestka, P.; Latombe, J.C.; Overmars, M.H. Probabilistic roadmaps for path planning in high-dimensional configuration spaces. IEEE Trans. Robot. Autom. 1996, 12, 566–580. [Google Scholar] [CrossRef]
- Hsu, D.; Latombe, J.C.; Motwani, R. Path planning in expansive configuration spaces. In Proceedings of the International Conference on Robotics and Automation, Albuquerque, NM, USA, 25 April 1997; Volume 3, pp. 2719–2726. [Google Scholar]
- LaValle, S.M. Rapidly-Exploring Random Trees: A New Tool for Path Planning. 1998. Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.35.1853 (accessed on 17 May 2019).
- Kuffner, J.J.; LaValle, S.M. RRT-Connect: An efficient approach to single-query path planning. In Proceedings of the 2000 ICRA. Millennium Conference. IEEE International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 2, pp. 995–1001. [Google Scholar]
- Hauser, K. Lazy collision checking in asymptotically-optimal motion planning. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Washington, DC, USA, 26–30 May 2015; pp. 2951–2957. [Google Scholar]
- Bohlin, R.; Kavraki, L.E. Path planning using lazy PRM. In Proceedings of the 2000 ICRA. Millennium Conference, IEEE International Conference on Robotics and Automation, Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000; Volume 1, pp. 521–528. [Google Scholar]
- Wang, W.; Li, Y.; Xu, X.; Yang, S.X. An adaptive roadmap guided Multi-RRTs strategy for single query path planning. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–8 May 2010; pp. 2871–2876. [Google Scholar]
- Diaz-Arango, G.; Hernandez-Martinez, L.; Sarmiento-Reyes, A.; Vazquez-Leal, H. Fast and robust homotopy path planning method for mobile robotics. In Proceedings of the 2016 IEEE International Symposium on Circuits and Systems (ISCAS), Montreal, QC, Canada, 22–25 May 2016; pp. 2579–2582. [Google Scholar]
- Cos-Cholula, H.E.D.; Díaz-Arango, G.U.; Hernández-Martínez, L.; Sarmiento-Reyes, A. An Homotopy Path Planning Method with automatic fixed value assignation of repulsion parameter for mobile robotics. In Proceedings of the 2016 13th International Conference on Electrical Engineering, Computing Science and Automatic Control (CCE), Mexico City, Mexico, 28–30 September 2016; pp. 1–6. [Google Scholar]
- Park, M.G.; Lee, M.C. A new technique to escape local minimum in artificial potential field based path planning. KSME Int. J. 2003, 17, 1876–1885. [Google Scholar] [CrossRef]
- Matoui, F.; Boussaid, B.; Abdelkrim, M.N. Local minimum solution for the potential field method in multiple robot motion planning task. In Proceedings of the 2015 16th International Conference on Sciences and Techniques of Automatic Control and Computer Engineering (STA), Monastir, Tunisia, 21–23 December 2015; pp. 452–457. [Google Scholar]
- Luo, C.; Mo, H.; Shen, F.; Zhao, W. Multi-Goal Motion Planning of an Autonomous Robot in Unknown Environments by an Ant Colony Optimization Approach; Springer International Publishing: Cham, Switzerland, 2016; pp. 519–527. [Google Scholar]
- Hernandez, K.; Bacca, B.; Posso, B. Multi-goal Path Planning Autonomous System for Picking up and Delivery Tasks in Mobile Robotics. IEEE Lat. Am. Trans. 2017, 15, 232–238. [Google Scholar] [CrossRef]
- Bueckert, J.; Yang, S.X.; Yuan, X.; Meng, M.Q.H. Neural dynamics based multiple target path planning for a mobile robot. In Proceedings of the 2007 IEEE International Conference on Robotics and Biomimetics (ROBIO), Sanya, China, 15–28 December 2007; pp. 1047–1052. [Google Scholar]
- Devaurs, D.; Siméon, T.; Cortés, J. A multi-tree extension of the transition-based RRT: Application to ordering-and-pathfinding problems in continuous cost spaces. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 2991–2996. [Google Scholar]
- Faigl, J.; Váňa, P.; Deckerová, J. Fast Heuristics for the 3-D Multi-Goal Path Planning Based on the Generalized Traveling Salesman Problem with Neighborhoods. IEEE Robot. Autom. Lett. 2019, 4, 2439–2446. [Google Scholar] [CrossRef]
- Ishida, S.; Rigter, M.; Hawes, N. Robot Path Planning for Multiple Target Regions. In Proceedings of the 2019 European Conference on Mobile Robots (ECMR), Prague, Czech Republic, 4–6 September 2019; pp. 1–6. [Google Scholar]
- Petereit, J.; Emter, T.; Frey, C.W. Safe mobile robot motion planning for waypoint sequences in a dynamic environment. In Proceedings of the 2013 IEEE International Conference on Industrial Technology (ICIT), Cape Town, South Africa, 25–28 February 2013; pp. 181–186. [Google Scholar]
- Yamamura, K. Simple algorithms for tracing solution curves. IEEE Int. Symp. Circuits Syst. 1992, 6, 2801–2804. [Google Scholar]
- Torres-Muñoz, D.; Vazquez-Leal, H.; Hernandez-Martinez, L.; Sarmiento-Reyes, A. Improved spherical continuation algorithm with application to the double-bounded homotopy (DBH). Comput. Appl. Math. 2014, 33, 147–161. [Google Scholar] [CrossRef]
- Oliveros-Munoz, J.M.; Jiménez-Islas, H. Hyperspherical path tracking methodology as correction step in homotopic continuation methods. Chem. Eng. Sci. 2013, 97, 413–429. [Google Scholar] [CrossRef]
- Ramirez-Pinero, A.; Vazquez-Leal, H.; Jimenez-Fernandez, V.M.; Sedighi, H.M.; Rashidi, M.M.; Filobello-Nino, U.; Castaneda-Sheissa, R.; Huerta-Chua, J.; Sarmiento-Reyes, L.A.; Laguna-Camacho, J.R.; et al. Speed-up hyperspheres homotopic path tracking algorithm for PWL circuits simulations. SpringerPlus 2016, 5, 890. [Google Scholar] [CrossRef] [PubMed][Green Version]
- Chua, L.O.; Kang, S.M. Section-wise piecewise-linear functions: Canonical representation, properties, and applications. Proc. IEEE 1977, 65, 915–929. [Google Scholar] [CrossRef]
- Chua, L.; Deng, A.C. Canonical piecewise-linear modeling. IEEE Trans. Circuits Syst. 1986, 33, 511–525. [Google Scholar] [CrossRef]
- Julian, P.; Desages, A.; Agamennoni, O. High-level canonical piecewise linear representation using a simplicial partition. IEEE Trans. Circuits Syst. Fundam. Theory Appl. 1999, 46, 463–480. [Google Scholar] [CrossRef]
- Julian, P.; Desages, A.; D’Amico, B. Orthonormal high-level canonical PWL functions with applications to model reduction. IEEE Trans. Circuits Syst. Fundam. Theory Appl. 2000, 47, 702–712. [Google Scholar] [CrossRef]
- Guzelis, C.; Goknar, I.C. A canonical representation for piecewise-affine maps and its applications to circuit analysis. IEEE Trans. Circuits Syst. 1991, 38, 1342–1354. [Google Scholar] [CrossRef]
- Schmidt, M.; Fung, G.; Rosales, R. Fast Optimization Methods for L1 Regularization: A Comparative Study and Two New Approaches. In Machine Learning: ECML 2007; Kok, J.N., Koronacki, J., Mantaras, R.L.d., Matwin, S., Mladenič, D., Skowron, A., Eds.; Springer: Berlin/Heidelberg, Germany, 2007; pp. 286–297. [Google Scholar]
- Sucan, I.A.; Moll, M.; Kavraki, L.E. The Open Motion Planning Library. IEEE Robot. Autom. Mag. 2012, 19, 72–82. [Google Scholar] [CrossRef]
- Moll, M.; Şucan, I.A.; Kavraki, L.E. Benchmarking Motion Planning Algorithms: An Extensible Infrastructure for Analysis and Visualization. IEEE Robot. Autom. Mag. 2015, 22, 96–102. [Google Scholar] [CrossRef]
- Coulter, R.C. Implementation of the Pure Pursuit Path Tracking Algorithm; Technical Report; DTIC Document: Springfield, MA, USA, 1992. [Google Scholar]
- Morales, J.; Martínez, J.L.; Martínez, M.A.; Mandow, A. Pure-Pursuit Reactive Path Tracking for Nonholonomic Mobile Robots with a 2D Laser Scanner. EURASIP J. Adv. Signal Process. 2009, 2009, 935237. [Google Scholar] [CrossRef]
- Jimenez-Fernandez, V.M.; Jimenez-Fernandez, M.; Vazquez-Leal, H.; Filobello-Nino, U.A.; Castro-Gonzalez, F.J. Smoothing the High Level Canonical Piecewise-Linear Model by an Exponential Approximation of its Basis-Function. Comput. Sist. 2016, 20, 227–237. [Google Scholar] [CrossRef][Green Version]
- Jimenez-Fernandez, V.M.; Jimenez-Fernandez, M.; Vazquez-Leal, H.; Muñoz-Aguirre, E.; Cerecedo-Nunez, H.H.; Filobello-Nino, U.A.; Castro-Gonzalez, F.J. Transforming the canonical piecewise-linear model into a smooth-piecewise representation. SpringerPlus 2016, 5, 1612. [Google Scholar] [CrossRef] [PubMed]
- Saha, M.; Latombe, J.C.; Chang, Y.C.; Prinz, F. Finding Narrow Passages with Probabilistic Roadmaps: The Small-Step Retraction Method. Auton. Robot. 2005, 19, 301–319. [Google Scholar] [CrossRef]
- Sun, Z.; Hsu, D.; Jiang, T.; Kurniawati, H.; Reif, J.H. Narrow passage sampling for probabilistic roadmap planning. IEEE Trans. Robot. 2005, 21, 1105–1115. [Google Scholar]
- Zhong, J.; Su, J. Narrow passages identification for Probabilistic Roadmap Method. In Proceedings of the 30th Chinese Control Conference, Yantai, China, 12 July 2011; pp. 3908–3912. [Google Scholar]


































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Planner | Query | Completeness | Approach | Main Issue/Bottleneck |
|---|---|---|---|---|
| RRT [3,7,31] | Single | Probabilistically | Sampling-based | Collision query |
| Bi-RRT [32] | Single | Probabilistically | Sampling-based | Collision query |
| RRT* [7] | Single | Probabilistically | Sampling-based | Collision query |
| PRM [7,29] | Multiple | Probabilistically | Sampling-based | Collision query |
| EST [30] | Single | Probabilistically | Sampling-based | Collision query |
| KPIECE [1] | Single | Probabilistically | Sampling-based | Collision query |
| LazyRRT [33] | Single | Probabilistically | Sampling-based | Density of nodes |
| LazyPRM [34] | Multiple | Probabilistically | Sampling-based | Density of nodes |
| APF [16,17,18] | Single | Semi-complete | Potential fields | Local minima |
| A* [24,25,26] | Single | Resolution | Cells decomposition | Grid resolution |
| Visibility graphs [12,13,14,15] | Multiple | Complete | Graph-based | Obstacles density |
| HPPM [10,19,20] | Single | Semi-complete | HCM (Mathematical model) | Repulsion parameter selection |
| Methodology | Non-Convergence Solved in SA (# Step) | Reversal Effects Solved in SA (# Step) | Total Steps | |
|---|---|---|---|---|
| Case 1 | HPPM | 0 | 1940,1986,2974 | 3033 |
| MTHPPM_VG | 1257,1927,1989,2373,2471,2492,2549 | 1825,1984,1994,2036 | 2602 | |
| Case 2 | HPPM | 1303 | 0 | 3594 |
| MTHPPM_VG | 1248,1984,2012,2061, 2417,2441,2483,2558,2636 | 1318,1579,1908,1961 2018,2103,2457,2636 | 2689 | |
| Case 3 | HPPM | 0 | 0 | 3633 |
| MTHPPM_VG | 1427,1491,2288,2316,2610 | 1777,2611 | 3192 | |
| Case 4 | HPPM | 17 | 36 | 2437 |
| MTHPPM_VG | 17,210,245,611 | 565 | 2046 | |
| Planner | Metric | Case 1 | Case 2 | Case 3 | Case 4 | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Min | Med | Max | Min | Med | Max | Min | Med | Max | Min | Med | Max | ||
| EST | M(MB) | 69.3 | 69.5 | 69.5 | 66.2 | 66.4 | 66.4 | 39.3 | 39.4 | 39.4 | 49 | 49 | 49 |
| T(s) | 1.13 | 3.10 | 20.0 | 1.21 | 4.16 | 20.0 | 0.86 | 1.53 | 2.93 | 0.619 | 1.629 | 8.613 | |
| L | 0.613 | 2.679 | 4.219 | 2.002 | 2.711 | 3.418 | 2.769 | 3.650 | 4.764 | 2.658 | 3.677 | 5.057 | |
| KPIECE1 | M(MB) | 69.5 | 69.5 | 69.5 | 66.4 | 66.4 | 66.4 | 39.4 | 39.4 | 39.4 | 49 | 49 | 49 |
| T(s) | 1.30 | 2.84 | 7.16 | 1.0 | 7.3 | 20.0 | 1.53 | 3.78 | 11.7 | 1.41 | 4.09 | 15.3 | |
| L | 2.969 | 4.545 | 6.847 | 3.147 | 4.749 | 6.563 | 4.235 | 6.074 | 7.834 | 3.795 | 6.340 | 9.955 | |
| PRM | M(MB) | 69.5 | 69.9 | 70 | 66.7 | 66.8 | 66.8 | 39.7 | 39.9 | 40.0 | 49.2 | 49.3 | 49.3 |
| T(s) | 20.0 | 20.0 | 20.1 | 20.00 | 20.10 | 20.18 | 20.0 | 20.1 | 20.2 | 20.0 | 20.0 | 20.1 | |
| L | 1.679 | 1.792 | 2.128 | 1.746 | 1.904 | 2.195 | 2.380 | 2.508 | 2.690 | 2.123 | 2.228 | 2.502 | |
| RRT | M(MB) | 70.0 | 80.0 | 80.3 | 66.8 | 70.1 | 70.1 | 42.5 | 49.5 | 51.3 | 50.07 | 64 | 64.25 |
| T(s) | 1.28 | 5.34 | 20.0 | 5.010 | 19.49 | 20.11 | 7.44 | 11.6 | 20.0 | 15.7 | 20.0 | 20.1 | |
| L | 1.824 | 1.971 | 2.293 | 1.626 | 2.004 | 2.488 | 2.666 | 2.861 | 3.144 | 1.382 | 1.620 | 3.463 | |
| Bi-RRT | M(MB) | 80.3 | 80.3 | 80.3 | 70.1 | 74.0 | 74.0 | 51.3 | 52.4 | 52.4 | 64.2 | 67.5 | 68.1 |
| T(s) | 0.37 | 1.14 | 10.59 | 0.925 | 3.368 | 20.07 | 3.27 | 7.09 | 15.4 | 5.91 | 11.2 | 20.1 | |
| L | 1.802 | 1.949 | 2.554 | 1.879 | 2.049 | 2.246 | 2.668 | 2.836 | 3.037 | 2.577 | 2.930 | 3.837 | |
| RRT* | M(MB) | 80.3 | 80.5 | 80.5 | 74.0 | 76.4 | 76.4 | 52.4 | 52.4 | 52.4 | 68.3 | 68.3 | 68.3 |
| T(s) | 20.0 | 20.0 | 20.1 | 20.00 | 20.07 | 20.14 | 20.0 | 20.0 | 20.1 | 20.0 | 20.0 | 20.1 | |
| L | 1.237 | 1.587 | 1.735 | 1.058 | 1.671 | 2.006 | 1.458 | 2.266 | 2.337 | 1.140 | 2.028 | 2.156 | |
| LazyPRM | M(MB) | 69.2 | 87.2 | 97.1 | 69.9 | 103.1 | 123.9 | 43.4 | 64.2 | 67.9 | 51 | 81.4 | 82.2 |
| T(s) | 20.0 | 20.0 | 23.5 | 20.02 | 20.07 | 20.33 | 20.0 | 20.0 | 20.1 | 20.0 | 20.0 | 20.1 | |
| L | 1.633 | 1.687 | 1.758 | 1.728 | 1.789 | 1.946 | 2.337 | 2.393 | 2.477 | 2.081 | 2.159 | 2.225 | |
| LazyRRT | M(MB) | 97.1 | 97.1 | 98.0 | 123.9 | 123.9 | 123.9 | 67.9 | 68.4 | 68.9 | 50.0 | 64 | 64.25 |
| T(s) | 1.06 | 8.43 | 20.14 | 2.825 | 13.41 | 20.57 | 4.16 | 18.4 | 20.2 | 15.79 | 20.07 | 20.11 | |
| L | 1.851 | 2.200 | 2.940 | 1.894 | 2.286 | 2.589 | 2.734 | 3.116 | 3.783 | 1.382 | 1.620 | 3.463 | |
| MTHPPM_VG | M(MB) | 0.075 | 0.0765 | 0.08186 | 0.056807 | ||||||||
| T(s) | 0.19 | 0.23397 | 0.159609 | 0.255962 | |||||||||
| L | 1.654 | 1.851 | 2.708 | 2.058 | |||||||||
| HPPM | M(MB) | 0.085 | 0.0984 | 0.08972 | 0.06555 | ||||||||
| T(s) | 0.22 | 0.30011 | 0.122805 | 0.247262 | |||||||||
| L | 2.098 | 2.637 | 2.699 | 2.407 | |||||||||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Diaz-Arango, G.; Vazquez-Leal, H.; Hernandez-Martinez, L.; Jimenez-Fernandez, V.M.; Heredia-Jimenez, A.; Ambrosio, R.C.; Huerta-Chua, J.; De Cos-Cholula, H.; Hernandez-Mendez, S. Multiple-Target Homotopic Quasi-Complete Path Planning Method for Mobile Robot Using a Piecewise Linear Approach. Sensors 2020, 20, 3265. https://doi.org/10.3390/s20113265
Diaz-Arango G, Vazquez-Leal H, Hernandez-Martinez L, Jimenez-Fernandez VM, Heredia-Jimenez A, Ambrosio RC, Huerta-Chua J, De Cos-Cholula H, Hernandez-Mendez S. Multiple-Target Homotopic Quasi-Complete Path Planning Method for Mobile Robot Using a Piecewise Linear Approach. Sensors. 2020; 20(11):3265. https://doi.org/10.3390/s20113265
Chicago/Turabian StyleDiaz-Arango, Gerardo, Hector Vazquez-Leal, Luis Hernandez-Martinez, Victor Manuel Jimenez-Fernandez, Aurelio Heredia-Jimenez, Roberto C. Ambrosio, Jesus Huerta-Chua, Hector De Cos-Cholula, and Sergio Hernandez-Mendez. 2020. "Multiple-Target Homotopic Quasi-Complete Path Planning Method for Mobile Robot Using a Piecewise Linear Approach" Sensors 20, no. 11: 3265. https://doi.org/10.3390/s20113265
APA StyleDiaz-Arango, G., Vazquez-Leal, H., Hernandez-Martinez, L., Jimenez-Fernandez, V. M., Heredia-Jimenez, A., Ambrosio, R. C., Huerta-Chua, J., De Cos-Cholula, H., & Hernandez-Mendez, S. (2020). Multiple-Target Homotopic Quasi-Complete Path Planning Method for Mobile Robot Using a Piecewise Linear Approach. Sensors, 20(11), 3265. https://doi.org/10.3390/s20113265