Target Localization Using Double-Sided Bistatic Range Measurements in Distributed MIMO Radar Systems


Abstract
:1. Introduction
2. System Model for BRM Based Target Localization and Problem Formulation
3. The Double-Sided BRM Approach
3.1. The Double-Sided Single-Stage BRM Algorithm
3.2. The Double-Sided Two-Stage BRM Algorithms
3.2.1. Proposed Double-Sided Two-Stage BRM Algorithm Using the Squared Relationships
3.2.2. Proposed Double-Sided Two-Stage BRM Algorithm Using the Taylor Approximated Relationships
4. Performance Analysis of Double-Sided BRM Method for Ideal Target/Antennae Positions
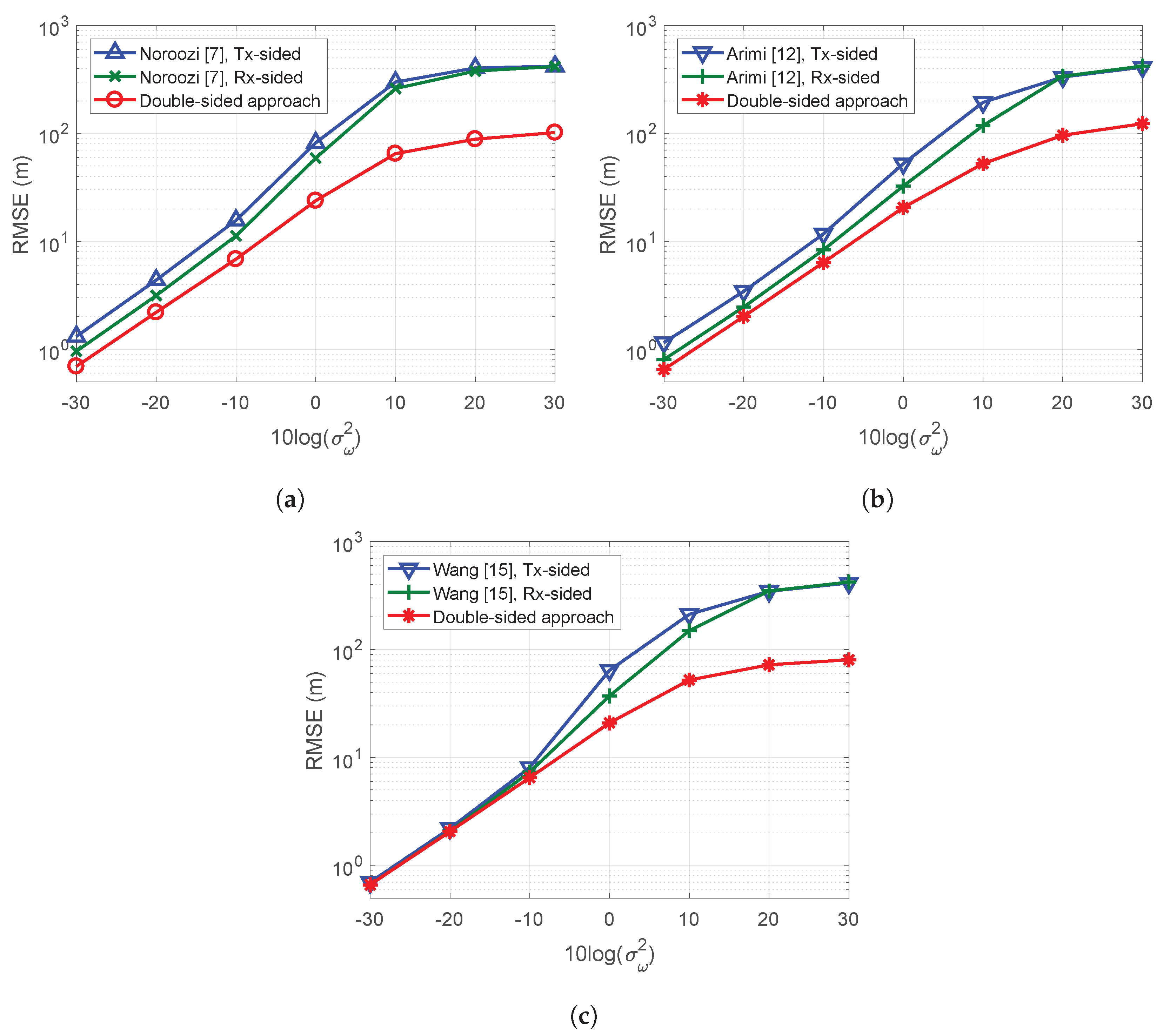
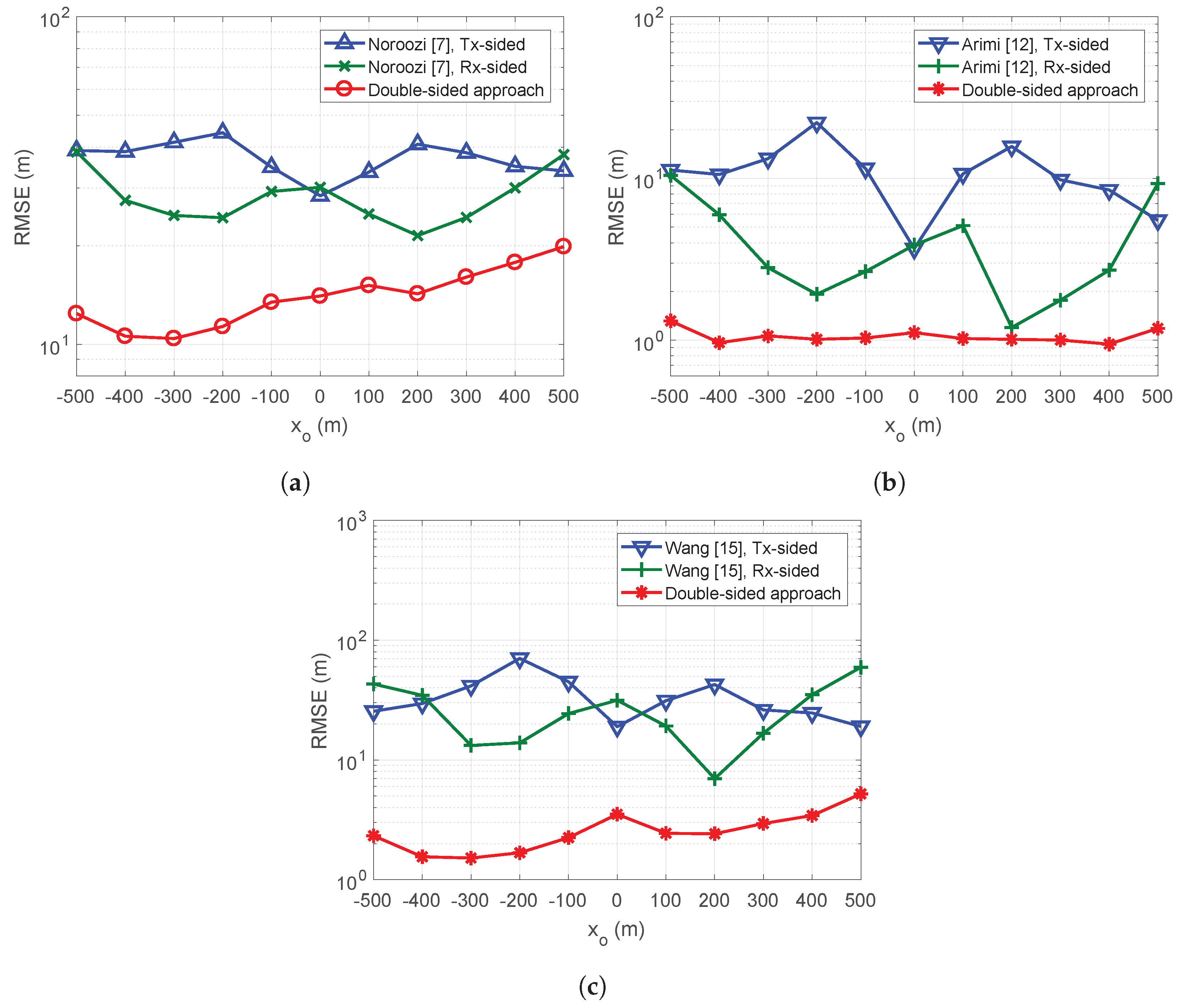
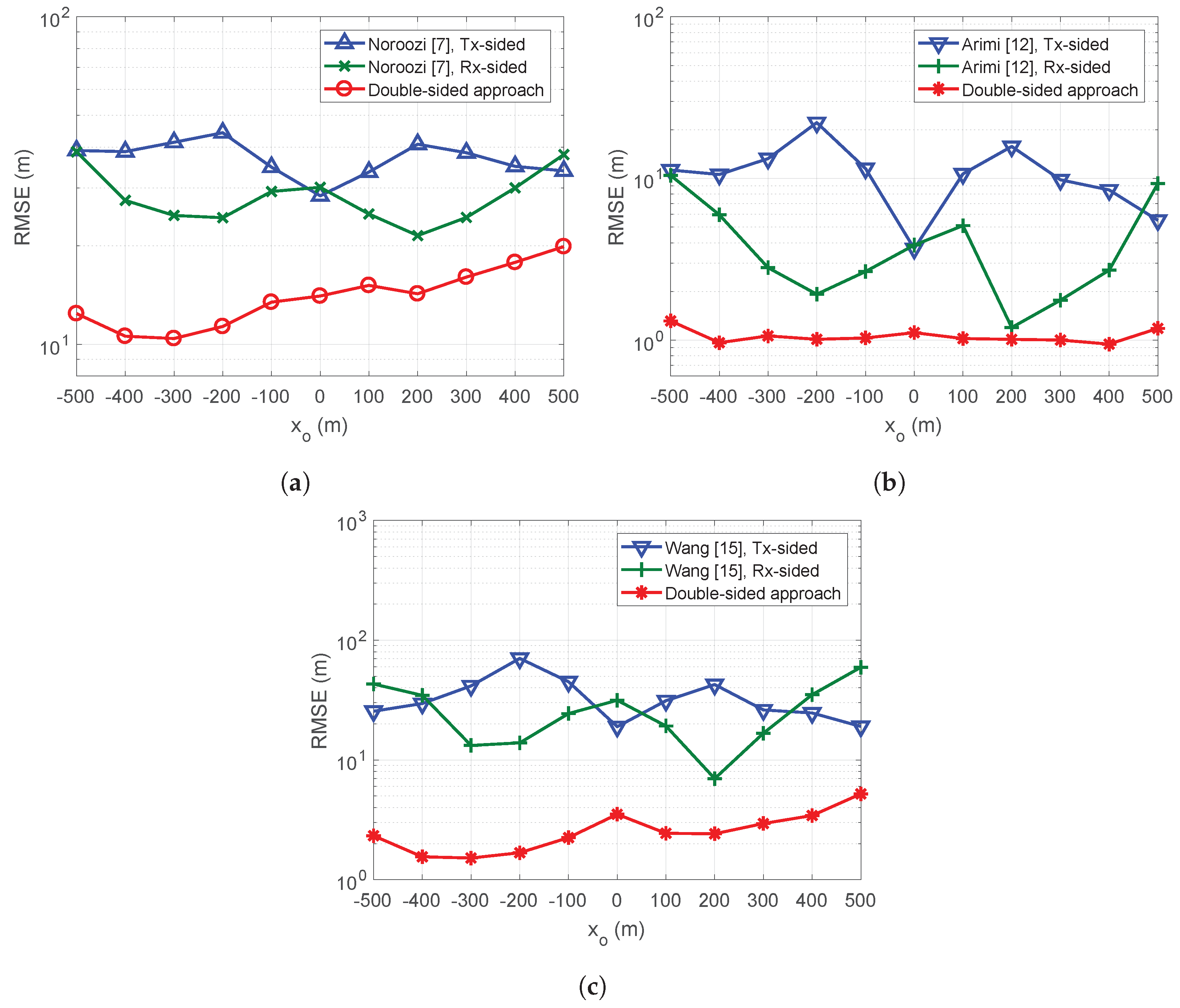
5. Numerical Simulation for Practical Target/Antennae Positions
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Haimovich, A.M.; Blum, R.S.; Cimini, L.J. MIMO Radar with Widely Separated Antennas. IEEE Signal Process. Mag. 2008, 25, 116–129. [Google Scholar] [CrossRef]
- Bar-Shalom, O.; Weiss, A.J. Direct positioning of stationary targets using MIMO radar. Elsevier J. Signal Process. 2011, 91, 2345–2358. [Google Scholar] [CrossRef]
- Gogineni, S.; Nehorai, A. Target Estimation Using Sparse Modeling for Distributed MIMO Radar. IEEE Trans. Signal Process. 2011, 59, 5315–5325. [Google Scholar] [CrossRef]
- Godrich, H.; Haimovich, A.M.; Blum, R.S. Target localization accuracy gain in MIMO radar-based system. IEEE Trans. Inf. Theory 2010, 56, 2783–2803. [Google Scholar] [CrossRef]
- Dianat, M.; Taban, M.R.; Dianat, J.; Sedighi, V. Target localization using least squares estimation for MIMO radars with widely separated antennas. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 2730–2741. [Google Scholar] [CrossRef]
- Noroozi, A.; Sebt, M.A. Target localization from bistatic range measurements in multi-transmitter multi-receiver passive radar. IEEE Signal Process. Lett. 2015, 22, 2445–2449. [Google Scholar] [CrossRef]
- Noroozi, A.; Sebt, M.A. Weighted least squares target location estimation in multi-transmitter multi-receiver passive radar using bistatic range measurements. IET Radar Sonar Navig. 2016, 6, 1088–1097. [Google Scholar] [CrossRef]
- Du, Y.; Wei, P. An explicit solution for target localization in Non-coherent distributed MIMO radar systems. IEEE Signal Process. Lett. 2014, 21, 1093–1097. [Google Scholar]
- Einemo, M.; So, H.C. Weighted least squares algorithm for target localization in distributed MIMO radar. Signal Process. 2015, 115, 144–150. [Google Scholar] [CrossRef]
- Park, C.H.; Chang, J.H. Closed-form localization for distributed MIMO radar systems using time delay measurements. IEEE Trans. Wirel. Commun. 2016, 15, 1480–1490. [Google Scholar] [CrossRef]
- Pishevar, S.; Mohamed-Pour, K.; Noroozi, A. A closed-form two-step target localization in MIMO radar systems using BR measurements. In Proceedings of the 2017 25th Iranian Conference on Electrical Engineering (ICEE), Tehran, Iran, 2–4 May 2017; pp. 2088–2093. [Google Scholar]
- Amiri, R.; Behnia, F.; Zamani, H. Asymptotically efficient target localization from bistatic range measurements in distributed MIMO radars. IEEE Signal Process. Lett. 2017, 24, 299–303. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, F.; Yang, L. An improved algebraic solution for TDOA localization with sensor position errors. IEEE Commun. Lett. 2015, 19, 2218–2221. [Google Scholar] [CrossRef]
- Amiri, R.; Behnia, F. An efficient weighted least squares estimator for elliptic localization in distributed MIMO radars. IEEE Signal Process. Lett. 2017, 24, 902–906. [Google Scholar] [CrossRef]
- Wang, J.; Qin, Z.; Wei, S.; Sun, Z.; Xiang, H. Effects of nuisance variables selection on target localisation accuracy in multistatic passive radar. Electron. Lett. 2018, 54, 1139–1141. [Google Scholar] [CrossRef]
- Malanowski, M.; Kulpa, K. Two Methods for Target Localization in Multistatic Passive Radar. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 572–580. [Google Scholar] [CrossRef]
- Barkat, M. Signal Detection and Estimation; Artech House: Norwood, NJ, USA, 2005. [Google Scholar]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
| Notations | Definition |
|---|---|
| matrices, all elements of which are zero | |
| matrices, all elements of which are unity | |
| identity matrix | |
| Diagonal matrix generated from an input vector | |
| Block diagonal matrix generated from input vectors (or matrices) | |
| ⊗ | Kronecker product |
| ⊙ | Element-wise product |
| sign function | |
| element-wise square root of the input vector |
| Methods | Number of Multiplications |
|---|---|
| Single-sided BRM algorithm [7] | |
| Single-sided two-stage BRM algorithms ([12,15]) | |
| Double-sided BRM algorithm | |
| Double-sided two-stage BRM algorithms |
| k | ||||||
|---|---|---|---|---|---|---|
| 1 | 250 | 300 | 180 | −250 | −300 | −180 |
| 2 | 300 | 350 | 120 | −300 | −350 | −120 |
| 3 | 300 | 250 | 160 | −300 | −250 | −160 |
| 4 | 200 | 320 | 150 | −200 | −320 | −150 |
| 5 | 250 | 200 | 150 | −250 | −200 | −150 |
| 6 | 200 | 200 | 200 | - | - | - |
| 7 | 300 | 300 | 300 | - | - | - |
| k | ||||||
|---|---|---|---|---|---|---|
| 1 | 0 | 0 | 15 | −450 | −450 | 20 |
| 2 | −300 | −200 | 15 | −450 | 450 | 30 |
| 3 | −300 | 200 | 10 | 450 | −450 | 40 |
| 4 | −200 | −300 | 20 | 450 | 450 | 10 |
| 5 | −200 | 300 | 10 | 0 | 600 | 20 |
| 6 | 200 | −300 | 10 | 600 | 0 | 10 |
| 7 | 200 | 300 | 8 | −600 | 0 | 15 |
| 8 | 300 | −200 | 12 | 0 | −600 | 10 |
| 9 | 300 | 200 | 16 | - | - | - |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shin, H.; Chung, W. Target Localization Using Double-Sided Bistatic Range Measurements in Distributed MIMO Radar Systems. Sensors 2019, 19, 2524. https://doi.org/10.3390/s19112524
Shin H, Chung W. Target Localization Using Double-Sided Bistatic Range Measurements in Distributed MIMO Radar Systems. Sensors. 2019; 19(11):2524. https://doi.org/10.3390/s19112524
Chicago/Turabian StyleShin, Hyuksoo, and Wonzoo Chung. 2019. "Target Localization Using Double-Sided Bistatic Range Measurements in Distributed MIMO Radar Systems" Sensors 19, no. 11: 2524. https://doi.org/10.3390/s19112524
APA StyleShin, H., & Chung, W. (2019). Target Localization Using Double-Sided Bistatic Range Measurements in Distributed MIMO Radar Systems. Sensors, 19(11), 2524. https://doi.org/10.3390/s19112524