Mixed Incoherent Far-Field and Near-Field Source Localization under Uniform Circular Array


Abstract
:1. Introduction
2. Signal Model
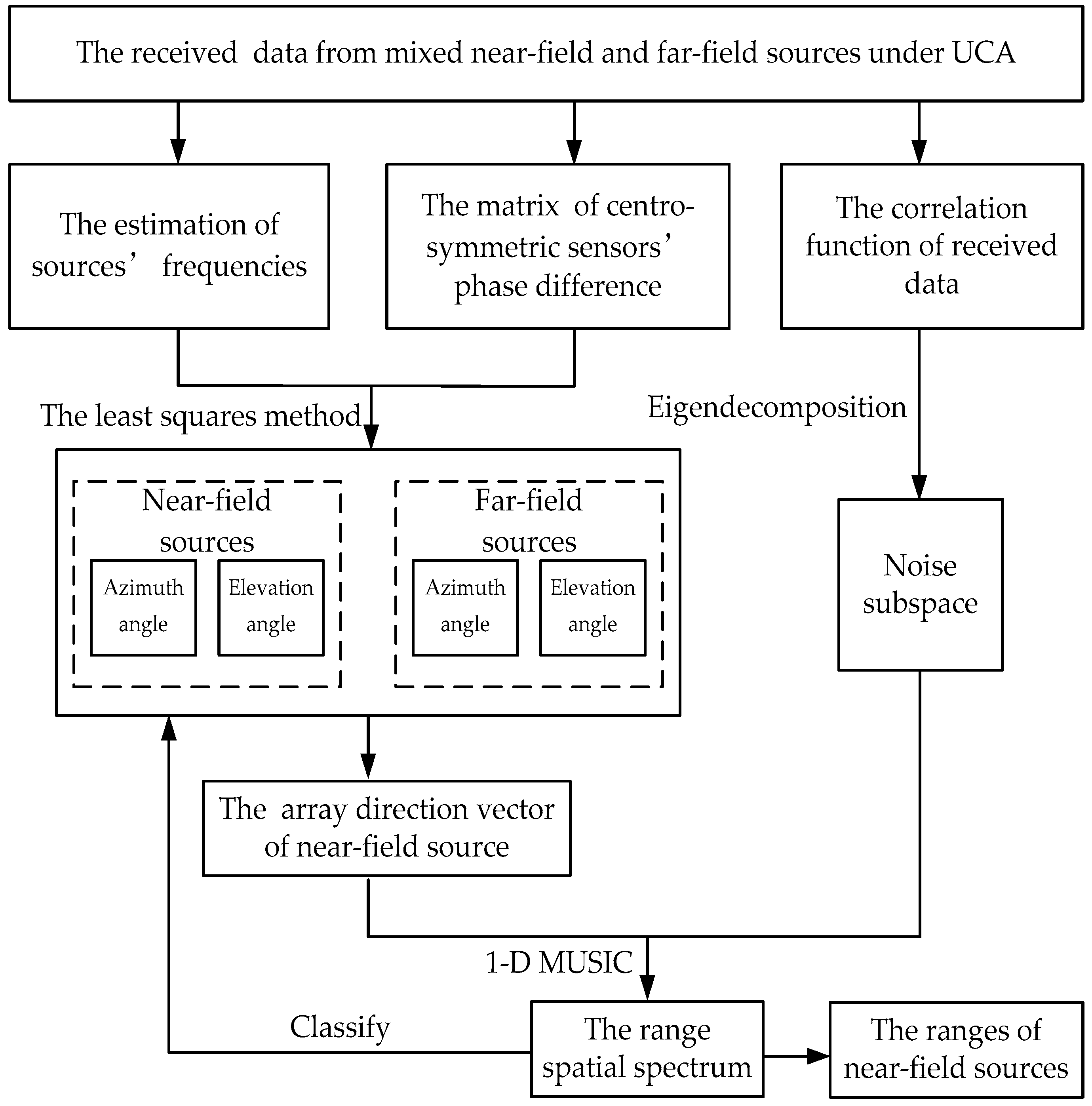
3. Proposed Algorithm
3.1. 2-D DOAs Estimation
3.2. Range Estimation
4. Simulation Results
4.1. Performance of Range Estimation
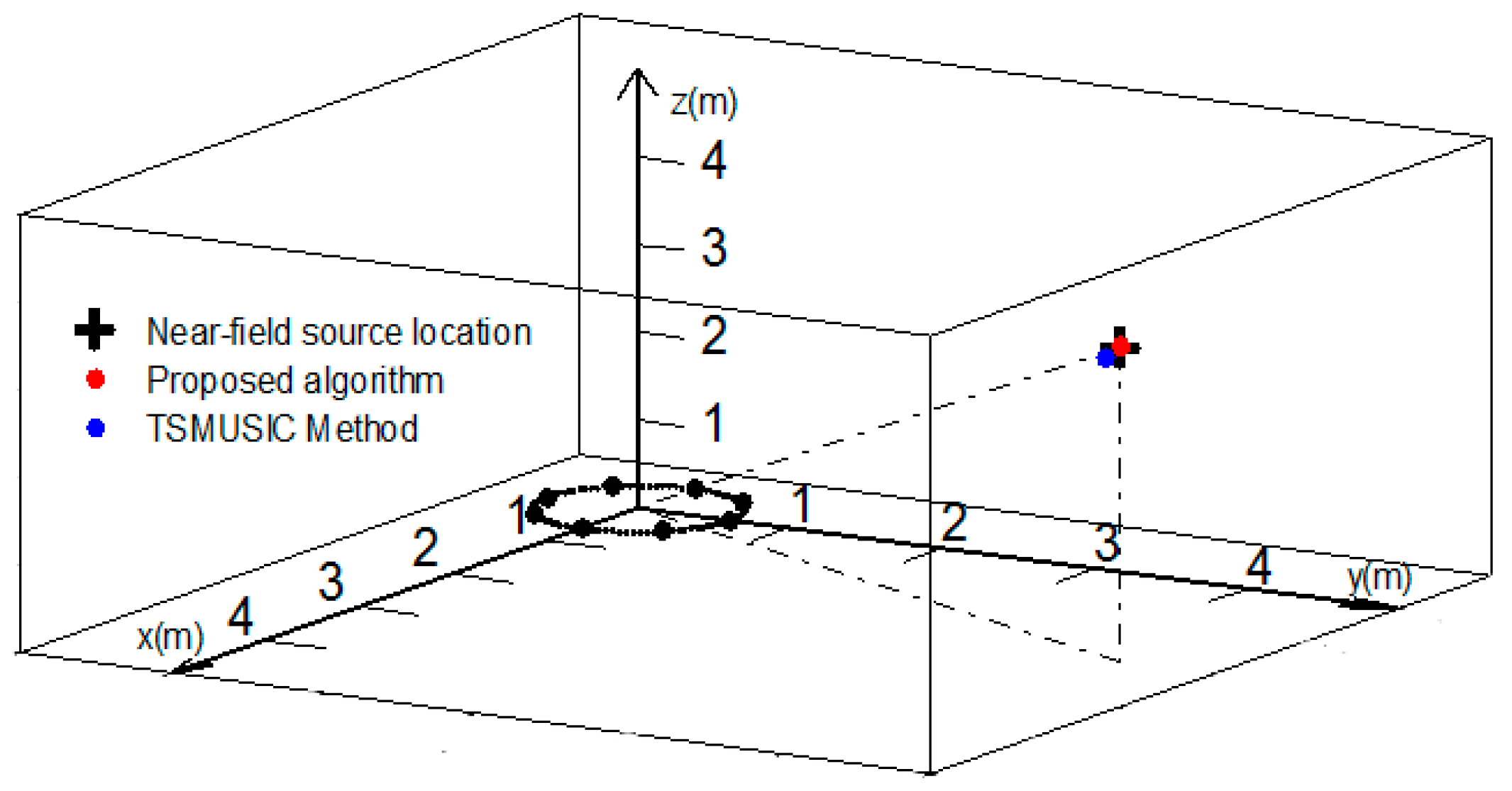
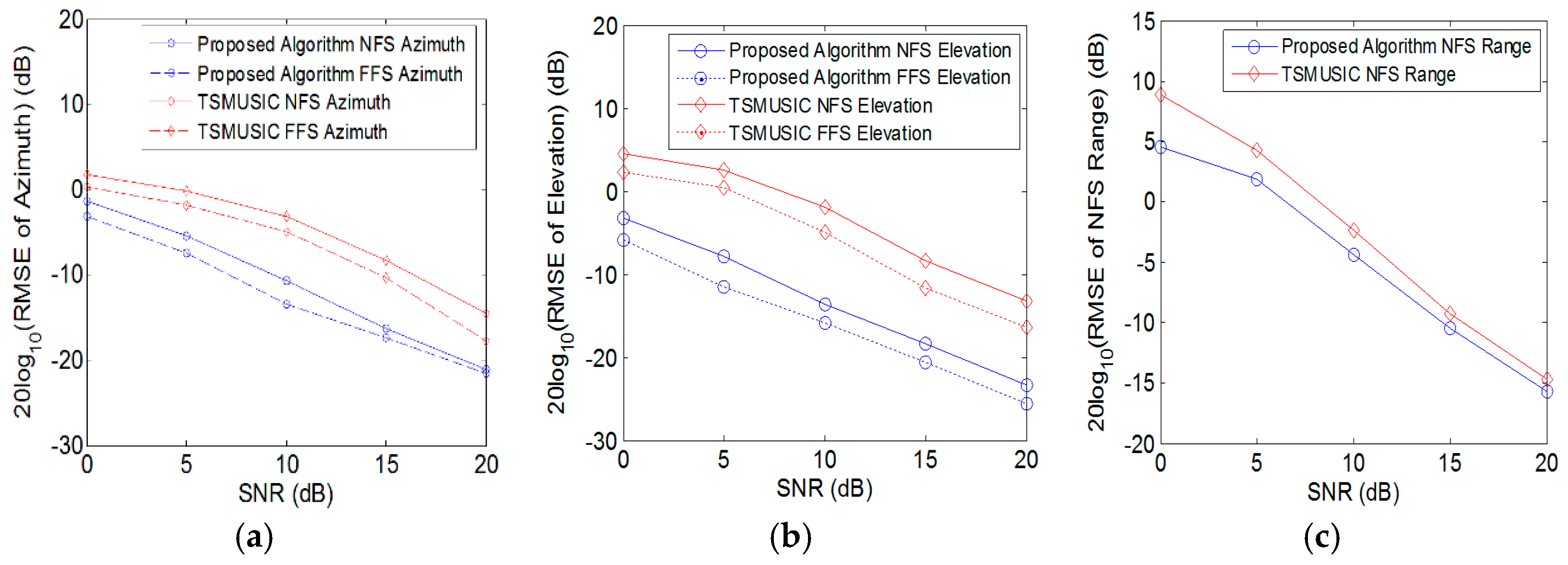
4.2. Performance of Location
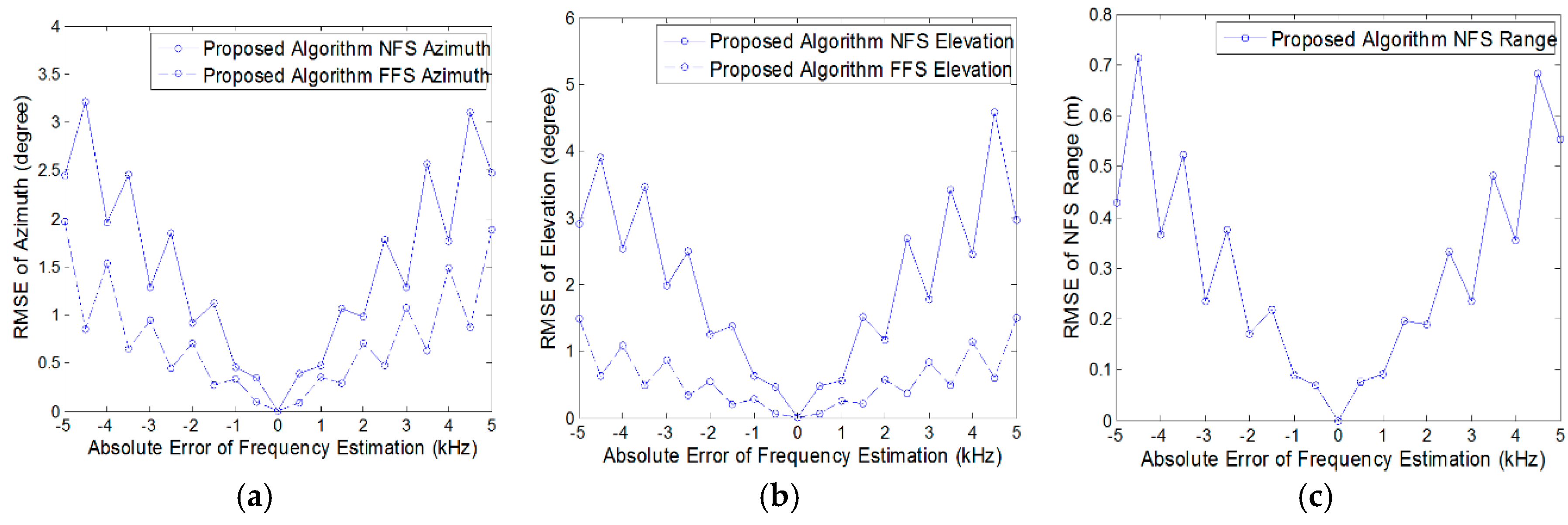
4.3. Performance of Location under Frequency Estimation Error
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Zhi, W.J.; Chia, M.Y.-W. Near-field source localization via symmetric subarrays. IEEE Signal Process. Lett. 2007, 14, 409–412. [Google Scholar] [CrossRef]
- Bae, E.H.; Lee, K.K. Closed-form 3-D localization for single source in uniform circular array with a center sensor. IEICE Trans. Commun. 2009, 92, 1053–1056. [Google Scholar] [CrossRef]
- Jung, T.J.; Lee, K.K. Closed-Form algorithm for 3-D single-source localization with uniform circular array. IEEE Antennas Wirel. Propag. 2014, 13, 1096–1099. [Google Scholar] [CrossRef]
- Wu, Y.T.; Wang, H.; Zhang, Y.B.; Wang, Y. Multiple near-field source localisation with uniform circular array. Electron. Lett. 2013, 49, 1509–1510. [Google Scholar] [CrossRef]
- Su, X.L.; Liu, Z.; Chen, X.; Wei, X.Z. Closed-Form Algorithm for 3-D Near-field OFDM Source Localization under Uniform Circular Array. Sensors 2018, 18, 226. [Google Scholar] [CrossRef]
- Tichavsky, P.; Wong, K.T.; Zoltowski, M.D. Near-field and far-field azimuth elevation angle estimation using a single vector-hydrophone. IEEE Trans. Signal Process. 2001, 49, 2498–2510. [Google Scholar] [CrossRef]
- Liang, J.L.; Liu, D. Passive localization of mixed near-field and far-field sources using two-stage music algorithm. IEEE Trans. Signal Process. 2010, 58, 108–120. [Google Scholar] [CrossRef]
- Wang, B.; Liu, J.J.; Sun, X.Y. Mixed sources localization based on sparse signal reconstruction. IEEE Signal Process. Lett. 2012, 19, 487–490. [Google Scholar] [CrossRef]
- He, J.; Swany, M.N.S.; Ahmad, M.O. Efficient application of MUSIC algorithm under the coexistence of far-field and near-field sources. IEEE Trans. Signal Process. 2012, 60, 2066–2070. [Google Scholar] [CrossRef]
- Jiang, J.J.; Duan, F.J.; Chen, J.; Li, Y.C.; Hua, X.N. Mixed near-field and far-field sources localization using the uniform linear sensor array. IEEE Sens. J. 2013, 13, 3136–3143. [Google Scholar] [CrossRef]
- Liu, G.H.; Sun, X.Y. Spatial differencing method for mixed far-field and near-field sources localization. IEEE Signal Process. Lett. 2014, 21, 1331–1335. [Google Scholar]
- Liu, G.H.; Sun, X.Y. Two-stage matrix differencing algorithm for mixed far-field and near-field sources classification and localization. IEEE Sens. J. 2014, 14, 1957–1965. [Google Scholar]
- Xue, B.; Fang, G.Y.; Ji, Y.C. Passive localisation of mixed far-field and near-field sources using uniform circular array. Electron. Lett. 2016, 20, 1690–1692. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Z.; Wei, X.Z. Unambiguous Parameter Estimation of Multiple Near-Field Sources via Rotating Uniform Circular Array. IEEE Antennas Wirel. Propag. 2017, 16, 872–875. [Google Scholar] [CrossRef]
- Chen, X.; Liu, Z.; Wei, X.Z. Ambiguity resolution for phase-based 3-D source localization under fixed uniform array. Sensors 2017, 17, 1086. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter Estimation | Actual Parameter | Proposed Method | TSMUSIC Method 1 | |||
|---|---|---|---|---|---|---|
| NFS 2 | FFS 3 | NFS | FFS | NFS | FFS | |
| Azimuth angle (degree) | 65.8 | 47.1 | 65.82 | 47.10 | 66.05 | 46.81 |
| Elevation angle (degree) | 53.2 | 37.2 | 53.18 | 37.20 | 53.89 | 37.39 |
| Range (m) | 6 | ∞ | 6.00 | ∞ | 5.91 | ∞ |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, X.; Liu, Z.; Chen, X.; Li, X. Mixed Incoherent Far-Field and Near-Field Source Localization under Uniform Circular Array. Sensors 2018, 18, 1432. https://doi.org/10.3390/s18051432
Su X, Liu Z, Chen X, Li X. Mixed Incoherent Far-Field and Near-Field Source Localization under Uniform Circular Array. Sensors. 2018; 18(5):1432. https://doi.org/10.3390/s18051432
Chicago/Turabian StyleSu, Xiaolong, Zhen Liu, Xin Chen, and Xiang Li. 2018. "Mixed Incoherent Far-Field and Near-Field Source Localization under Uniform Circular Array" Sensors 18, no. 5: 1432. https://doi.org/10.3390/s18051432
APA StyleSu, X., Liu, Z., Chen, X., & Li, X. (2018). Mixed Incoherent Far-Field and Near-Field Source Localization under Uniform Circular Array. Sensors, 18(5), 1432. https://doi.org/10.3390/s18051432