
Networked Fusion Filtering from Outputs with Stochastic Uncertainties and Correlated Random Transmission Delays



Abstract
:1. Introduction
2. Problem Formulation and Model Description
- (H1)
- The signal process, , has zero mean and its covariance function can be expressed in a separable form; namely, , where are known matrices of dimensions .
- (H2)
- , , are independent sequences of independent random parameter matrices whose entries have known means and known second-order moments; we will denote .
- (H3)
- The sensor measurement noises , are zero-mean sequences with known second-order moments, defined by:
- (H4)
- are sequences of Bernoulli random variables with known means, . It is assumed that and are independent for , and the second-order moments, and are also known.
- (H5)
- For , the processes and are mutually independent.
3. Distributed Fusion Linear Filter
3.1. Derivation of the Local LS Linear Filters
3.2. Derivation of the Distributed LS Fusion Linear Filter
4. Centralized LS Fusion Linear Filter
- (P1)
- is a sequence of independent random parameter matrices whose entries have known means and second-order moments.
- (P2)
- The noise is a zero-mean sequence with known second-order moments defined by the matrices .
- (P3)
- The matrices have known means, , and and are independent for .
- (P4)
- The processes and are mutually independent.
5. Numerical Simulation Example
- , , and , where is a zero-mean Gaussian white process with unit variance, and , , are white processes with the following time-invariant probability distributions:
- –
- For , are Bernoulli random variables with .
- –
- is uniformly distributed over .
- –
It is also assumed that the sequences and are mutually independent. - The additive noises are defined as , where , , , and is a zero-mean Gaussian white process with unit variance.
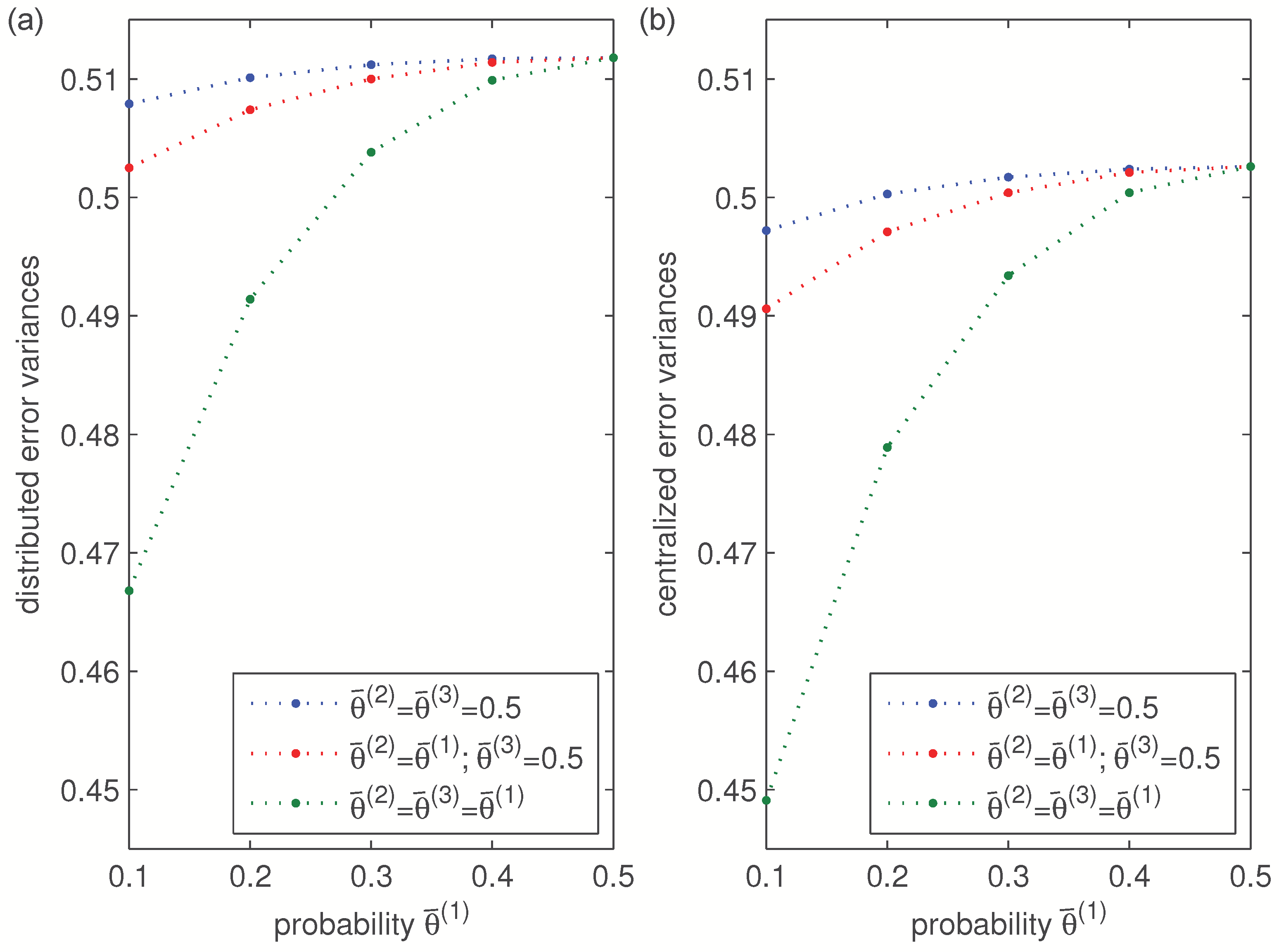
- Case I: error variances versus , when . In this case, as mentioned above, the values , lead to the values , respectively, for the delay probabilities of sensors 1 and 4, whereas the delay probabilities of sensors 2 and 3 are constant and equal to 0.25.
- Case II: error variances versus , when and . Varying as in Case I, the delay probabilities of sensors 1, 2 and 4 are equal and take the aforementioned values, whereas the delay probability of sensor 3 is constant and equal to 0.25.
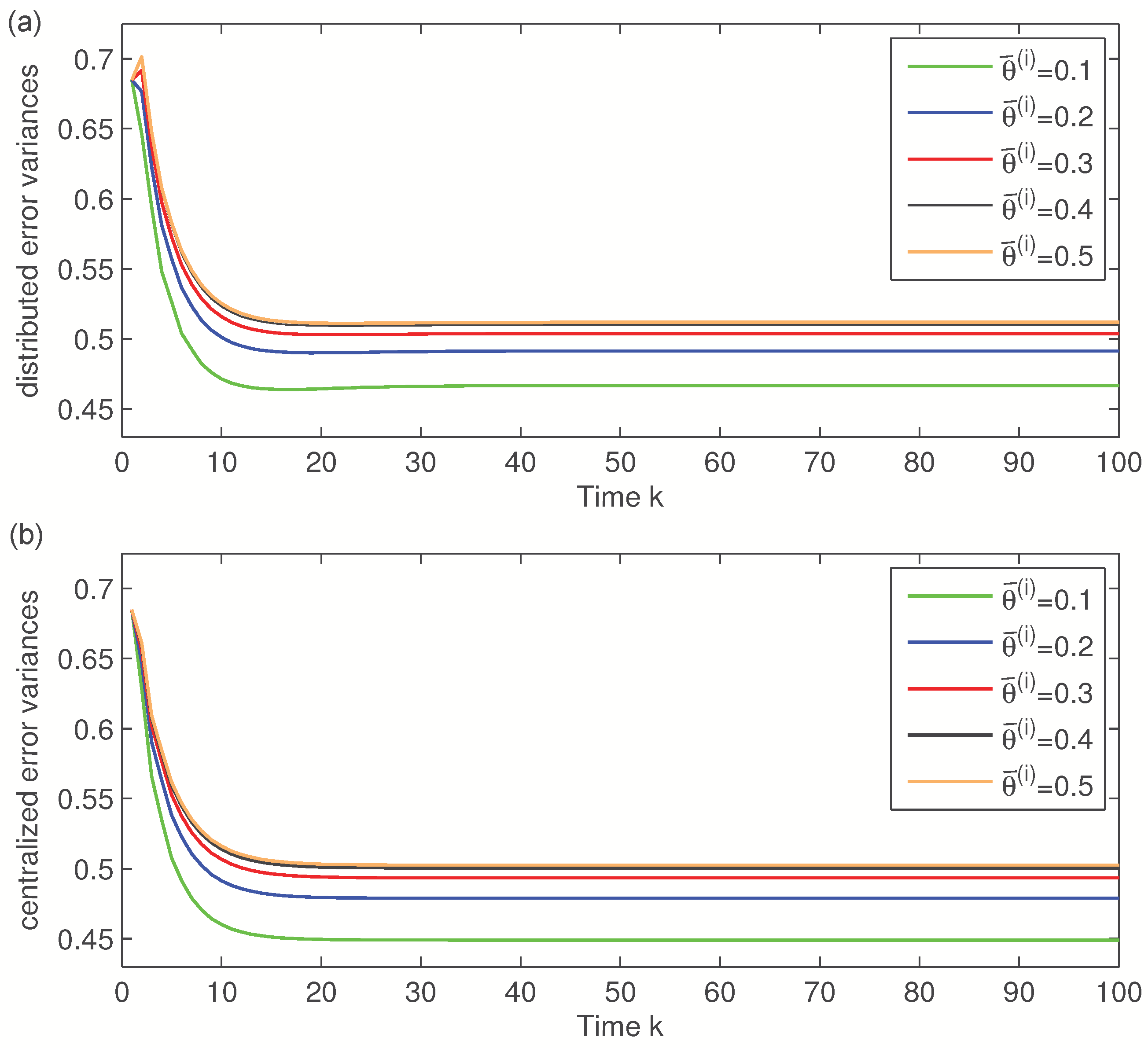
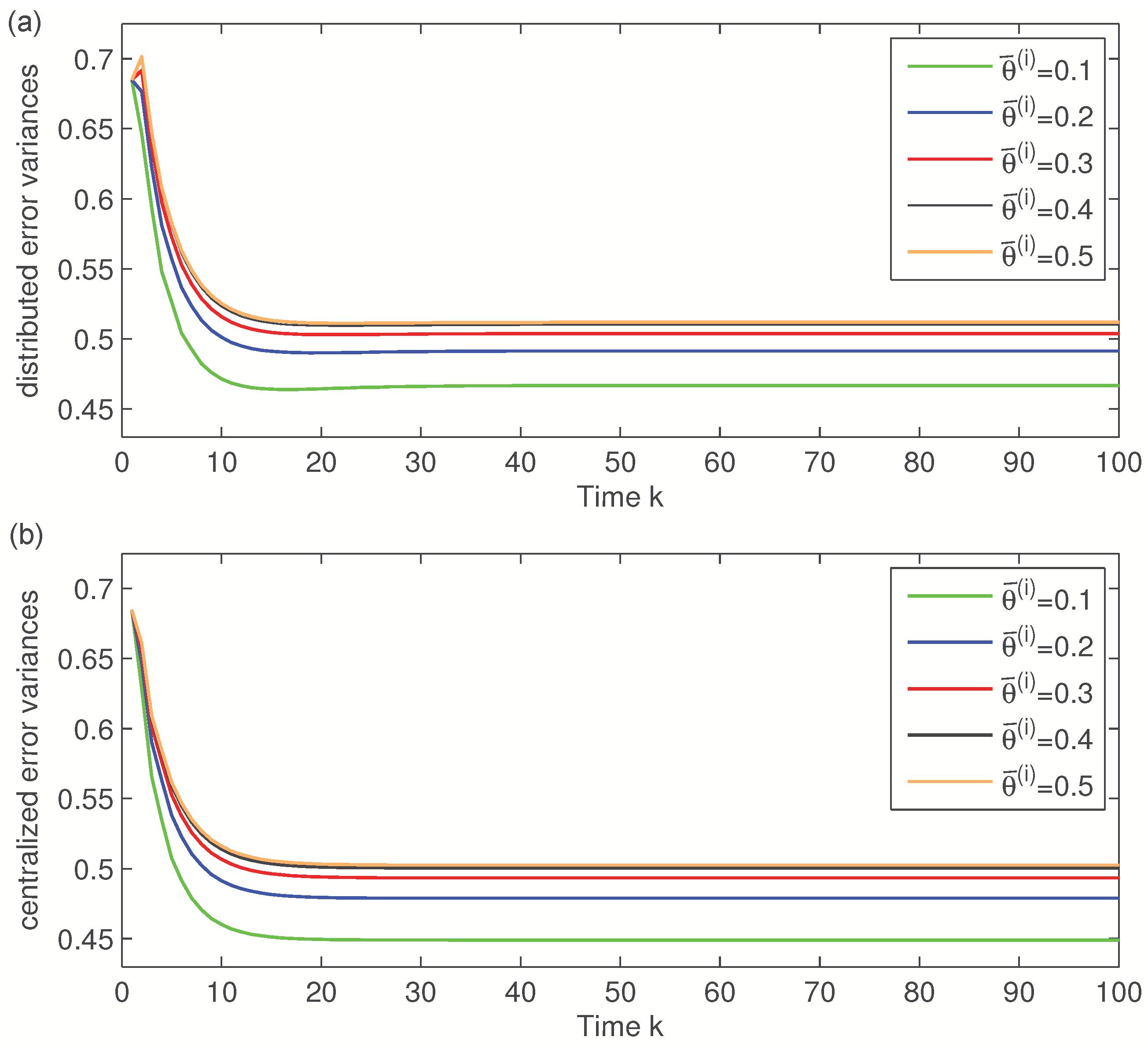
- Case III: error variances versus , when . Now, as in Figure 2, the delay probabilities of the four sensors are equal, and they all take the aforementioned values.
6. Conclusions
- Information on the signal process: our approach, based on covariance information, does not require the evolution model generating the signal process to design the proposed distributed and centralized filtering algorithms; nonetheless, they are also applicable to the conventional formulation using the state-space model.
- Signal uncertain measured outputs: random measurement matrices and cross-correlation between the different sensor noises are considered in the measured outputs, thus providing a unified framework to address different network-induced phenomena, such as missing measurements or sensor gain degradation, along with correlated measurement noises.
- Random one-step transmission delays: the fusion estimation problems are addressed assuming random one-step delays in the outputs transmission to the fusion center through the network communication channels; the delays have different characteristics at each sensor and they are assumed to be correlated and cross-correlated at consecutive sampling times. This correlation assumption covers many situations where the common assumption of independent delays is not realistic; for example, networked systems with stand-by sensors for the immediate replacement of a failed unit, thus avoiding the possibility of two successive delayed observations.
- Fusion filtering algorithms: firstly, recursive algorithms for the local LS linear signal filters based on the measured output data coming from each sensor have been designed by an innovation approach; the computational procedure of the local algorithms is very simple and suitable for online applications. After that, the matrix-weighted sum that minimizes the mean-squared estimation error is proposed as distributed fusion estimator. Also, using covariance information, a recursive centralized LS linear filtering algorithm, with analogous structure to that of the local algorithms, is proposed. The accuracy of the proposed fusion estimators, obtained under the LS optimality criterion, is measured by the error covariance matrices, which can be calculated offline as they do not depend on the current observed data set.
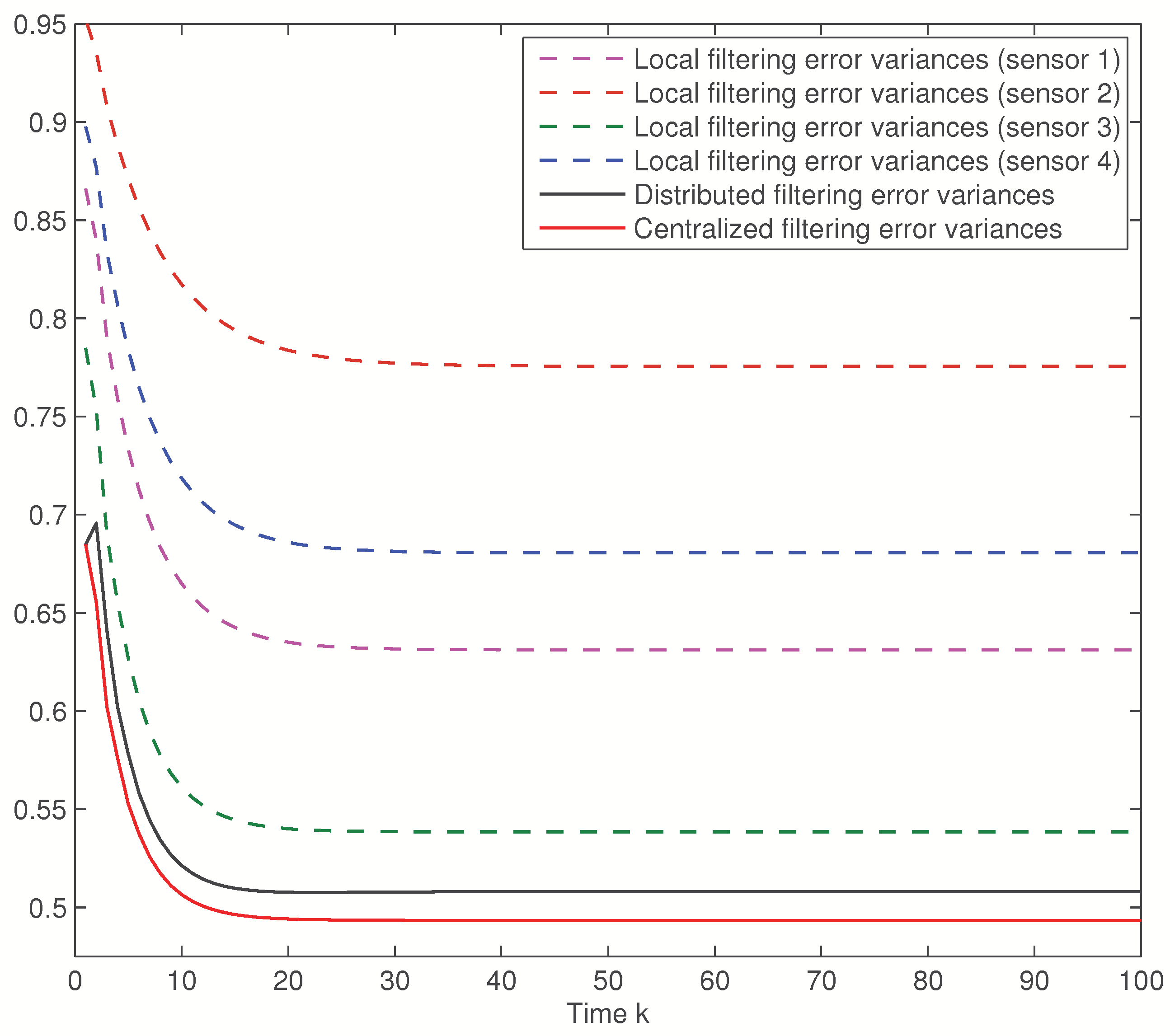
- Simulations: a numerical simulation example has illustrated the usefulness of the proposed algorithms for the estimation of a scalar signal. Error variance comparisons have shown that both distributed and centralized fusion filters outperform the local ones, as well as a slight superiority of the centralized fusion estimators over the distributed ones. The effects of the delays on the estimators performance have been also analyzed by the error variances. This example has also highlighted the applicability of the proposed algorithms to different multi-sensor systems with stochastic uncertainties, which can be dealt with using the observation model with random measurement matrices considered in this paper.
Acknowledgments
Author Contributions
Conflicts of Interest
Abbreviations
| LS | Least-Squares |
| OPL | Orthogonal Projection Lemma |
References
- Li, W.; Wang, Z.; Wei, G.; Ma, L.; Hu, J.; Ding, D. A Survey on multisensor fusion and consensus filtering for sensor networks. Discret. Dyn. Nat. Soc. 2015, 2015, 683701. [Google Scholar]
- Ran, C.; Deng, Z. Self-tuning weighted measurement fusion Kalman filtering algorithm. Comput. Stat. Data Anal. 2012, 56, 2112–2128. [Google Scholar] [CrossRef]
- Feng, J.; Zeng, M. Optimal distributed Kalman filtering fusion for a linear dynamic system with cross-correlated noises. Int. J. Syst. Sci. 2012, 43, 385–398. [Google Scholar] [CrossRef]
- Yan, L.; Li, X.R.; Xia, Y.; Fu, M. Optimal sequential and distributed fusion for state estimation in cross-correlated noise. Automatica 2013, 49, 3607–3612. [Google Scholar] [CrossRef]
- Feng, J.; Wang, Z.; Zeng, M. Distributed weighted robust Kalman filter fusion for uncertain systems with autocorrelated and cross-correlated noises. Inform. Fusion 2013, 14, 78–86. [Google Scholar] [CrossRef]
- Hu, J.; Wang, Z.; Chen, D.; Alsaadi, F.E. Estimation, filtering and fusion for networked systems with network-induced phenomena: New progress and prospects. Inform. Fusion 2016, 31, 65–75. [Google Scholar] [CrossRef]
- Liu, Y.; He, X.; Wang, Z.; Zhou, D. Optimal filtering for networked systems with stochastic sensor gain degradation. Automatica 2014, 50, 1521–1525. [Google Scholar] [CrossRef]
- Caballero-Águila, R.; García-Garrido, I.; Linares-Pérez, J. Information fusion algorithms for state estimation in multi-sensor systems with correlated missing measurements. Appl. Math. Comput. 2014, 226, 548–563. [Google Scholar] [CrossRef]
- Fangfang, P.; Sun, S. Distributed fusion estimation for multisensor multirate systems with stochastic observation multiplicative noises. Math. Probl. Eng. 2014, 2014, 373270. [Google Scholar] [CrossRef]
- Pang, C.; Sun, S. Fusion predictors for multi-sensor stochastic uncertain systems with missing measurements and unknown measurement disturbances. IEEE Sens. J. 2015, 15, 4346–4354. [Google Scholar] [CrossRef]
- Tian, T.; Sun, S.; Li, N. Multi-sensor information fusion estimators for stochastic uncertain systems with correlated noises. Inform. Fusion 2016, 27, 126–137. [Google Scholar] [CrossRef]
- De Koning, W.L. Optimal estimation of linear discrete-time systems with stochastic parameters. Automatica 1984, 20, 113–115. [Google Scholar] [CrossRef]
- Luo, Y.; Zhu, Y.; Luo, D.; Zhou, J.; Song, E.; Wang, D. Globally optimal multisensor distributed random parameter matrices Kalman filtering fusion with applications. Sensors 2008, 8, 8086–8103. [Google Scholar] [CrossRef]
- Shen, X.J.; Luo, Y.T.; Zhu, Y.M.; Song, E.B. Globally optimal distributed Kalman filtering fusion. Sci. China Inf. Sci. 2012, 55, 512–529. [Google Scholar] [CrossRef]
- Hu, J.; Wang, Z.; Gao, H. Recursive filtering with random parameter matrices, multiple fading measurements and correlated noises. Automatica 2013, 49, 3440–3448. [Google Scholar] [CrossRef]
- Linares-Pérez, J.; Caballero-Águila, R.; García-Garrido, I. Optimal linear filter design for systems with correlation in the measurement matrices and noises: Recursive algorithm and applications. Int. J. Syst. Sci. 2014, 45, 1548–1562. [Google Scholar] [CrossRef]
- Caballero-Águila, R.; García-Garrido, I.; Linares-Pérez, J. Distributed fusion filtering in networked systems with random measurement matrices and correlated noises. Discret. Dyn. Nat. Soc. 2015, 2015, 398605. [Google Scholar] [CrossRef]
- Shi, Y.; Fang, H. Kalman filter based identification for systems with randomly missing measurements in a network environment. Int. J. Control 2010, 83, 538–551. [Google Scholar] [CrossRef]
- Li, H.; Shi, Y. Robust H∞ filtering for nonlinear stochastic systems with uncertainties and random delays modeled by Markov chains. Automatica 2012, 48, 159–166. [Google Scholar] [CrossRef]
- Li, N.; Sun, S.; Ma, J. Multi-sensor distributed fusion filtering for networked systems with different delay and loss rates. Digit. Signal Process. 2014, 34, 29–38. [Google Scholar] [CrossRef]
- Sun, S.; Ma, J. Linear estimation for networked control systems with random transmission delays and packet dropouts. Inf. Sci. 2014, 269, 349–365. [Google Scholar] [CrossRef]
- Caballero-Águila, R.; Hermoso-Carazo, A.; Linares-Pérez, J. Covariance-based estimation from multisensor delayed measurements with random parameter matrices and correlated noises. Math. Probl. Eng. 2014, 2014, 958474. [Google Scholar] [CrossRef]
- Chen, B.; Zhang, W.; Yu, L. Networked fusion Kalman filtering with multiple uncertainties. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2332–2349. [Google Scholar] [CrossRef]
- Caballero-Águila, R.; Hermoso-Carazo, A.; Linares-Pérez, J. Optimal state estimation for networked systems with random parameter matrices, correlated noises and delayed measurements. Int. J. Gen. Syst. 2015, 44, 142–154. [Google Scholar] [CrossRef]
- Wang, S.; Fang, H.; Tian, X. Recursive estimation for nonlinear stochastic systems with multi-step transmission delays, multiple packet dropouts and correlated noises. Signal Process. 2015, 115, 164–175. [Google Scholar] [CrossRef]
- Chen, D.; Yu, Y.; Xu, L.; Liu, X. Kalman filtering for discrete stochastic systems with multiplicative noises and random two-step sensor delays. Discret. Dyn. Nat. Soc. 2015, 2015, 809734. [Google Scholar] [CrossRef]
- Caballero-Águila, R.; Hermoso-Carazo, A.; Linares-Pérez, J. Fusion estimation using measured outputs with random parameter matrices subject to random delays and packet dropouts. Signal Process. 2016, 127, 12–23. [Google Scholar] [CrossRef]
- Chen, D.; Xu, L.; Du, J. Optimal filtering for systems with finite-step autocorrelated process noises, random one-step sensor delay and missing measurements. Commun. Nonlinear Sci. Numer. Simul. 2016, 32, 211–224. [Google Scholar] [CrossRef]
- Wang, S.; Fang, H.; Tian, X. Minimum variance estimation for linear uncertain systems with one-step correlated noises and incomplete measurements. Digit. Signal Process. 2016, 49, 126–136. [Google Scholar] [CrossRef]
- Gao, S.; Chen, P.; Huang, D.; Niu, Q. Stability analysis of multi-sensor Kalman filtering over lossy networks. Sensors 2016, 16, 566. [Google Scholar] [CrossRef] [PubMed]
- Caballero-Águila, R.; Hermoso-Carazo, A.; Linares-Pérez, J. Linear estimation based on covariances for networked systems featuring sensor correlated random delays. Int. J. Syst. Sci. 2013, 44, 1233–1244. [Google Scholar] [CrossRef]
- Kailath, T.; Sayed, A.H.; Hassibi, B. Linear Estimation; Prentice Hall: Upper Saddle River, NJ, USA, 2000. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
| Time k | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 1 | 1 | 0 | 0 | 1 | 0 | 1 | 1 | 1 | 0 | 0 | 1 | 1 | ||
| 0 | 0 | 1 | 0 | 0 | 1 | 0 | 0 | 0 | 1 | 0 | 0 | 0 | |||
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Caballero-Águila, R.; Hermoso-Carazo, A.; Linares-Pérez, J. Networked Fusion Filtering from Outputs with Stochastic Uncertainties and Correlated Random Transmission Delays. Sensors 2016, 16, 847. https://doi.org/10.3390/s16060847
Caballero-Águila R, Hermoso-Carazo A, Linares-Pérez J. Networked Fusion Filtering from Outputs with Stochastic Uncertainties and Correlated Random Transmission Delays. Sensors. 2016; 16(6):847. https://doi.org/10.3390/s16060847
Chicago/Turabian StyleCaballero-Águila, Raquel, Aurora Hermoso-Carazo, and Josefa Linares-Pérez. 2016. "Networked Fusion Filtering from Outputs with Stochastic Uncertainties and Correlated Random Transmission Delays" Sensors 16, no. 6: 847. https://doi.org/10.3390/s16060847
APA StyleCaballero-Águila, R., Hermoso-Carazo, A., & Linares-Pérez, J. (2016). Networked Fusion Filtering from Outputs with Stochastic Uncertainties and Correlated Random Transmission Delays. Sensors, 16(6), 847. https://doi.org/10.3390/s16060847