
A Novel Sensor Selection and Power Allocation Algorithm for Multiple-Target Tracking in an LPI Radar Network


Abstract
:1. Introduction
2. Radar Network System Model
2.1. Sensitivity of the Radar Network System
2.2. Radar Network Signal Model
- (1)
- All radars in the radar network are sufficiently separated, and the transmitter–target–receiver geometries are different due to propagation distances and antenna gains. Based on the discussions in reference [27], the path gain includes two parts, namely the target reflection coefficient and the propagation loss factor .
- (2)
- The targets are comprised of a large number of small independent and identically distributed (i.i.d.) random scatterers, then can be got based on the central limit theorem [28], where . The propagation loss is concerned with target proximity and antenna properties:where is a constant. The ’s would differ from one another which can be easily obtained if transmitters have a certain beam forming capability and they track targets cooperatively assuming beam synchronization.
- (3)
- All receivers are homogeneous and the receiver noises are white Gaussion noise, so those of the are i.i.d. complex Gaussion vectors with distribution .
- (4)
- and are mutually independent.
3. Mutual Information
- (5)
- The transmitted waveforms are orthogonal with different power, then () can be obtained. Let denotes the transmitted power of radar when it is assigned to target q.
4. Sensor Selection and Power Allocation Algorithm
4.1. Power Allocation Optimization Problem Solution
| Algorithm 1 Bisection Method for Power Allocation | |
| Step (1): Set , , and the pre-specified accuracy . | |
| Step (2): Calculate , if , return and stop the algorithm, otherwise, go to Step (3). | |
| Step (3): Calculate the midpoint of the interval , . | |
| Step (4): | If , return and stop iterating; |
| If , the intercal provides no feasible point to satisfy , replace with ; | |
| If , the intercal provides no feasible point to satisfy , replace with . | |
| Step (5): If convergence is satisfactory (that is, ), then return or , and stop iterating, otherwise, go to Step (3). | |
4.2. Sensor Selection Optimization Problem Solution
| Algorithm 2 Sensor Selection Algorithm with Lower Complexity |
| Step (1): Form the required minimum transmitted power matrix according to Section 4.1. |
| Step (2): Find the minimum power of each column, radar in relation to the minimum power is assigned to the target of this column. |
| Step (3): Choose a target priority order for the sensor selection. According to the target priority order from low to high, if the assignment of target has inconsistencied with condition , shift to the next minimum power by holding others. |
| Step (4): Find the best sensor selection scheme which satisfy condition and condition , and then calculate the value of . |
| Step (5): Choose another target priority order and return to Step (3) until all permutation of target priority order has been investigated. |
| Step (6): Sensor selction matrix can be formed with the minimum of all target priority orders. |
4.3. Target State Estimation
| Algorithm 3 General Steps of Target Tracking |
| Initialization: Let , set , , assume an initial PDF and the particle number . |
| Iteration: For |
| Step (1): Data association: Calculate the Euclidean distance between observed data and labeled data of each target, and then which target the observed data belong to is determined by the majority of its k-nearest neighbors; |
| Step (2): Draw samples according to and obtain ; |
| Step (3): Measurement update: For , give the measurement vector , and define the weight ; |
| Step (4): Normalizing: ; |
| Step (5): Resampling: Take samples with replacement from the set , where the probability to take sample is and let ; |
| Step (6): Calculate and according to Equation (18); |
| Step (7): Send and to all radars. |
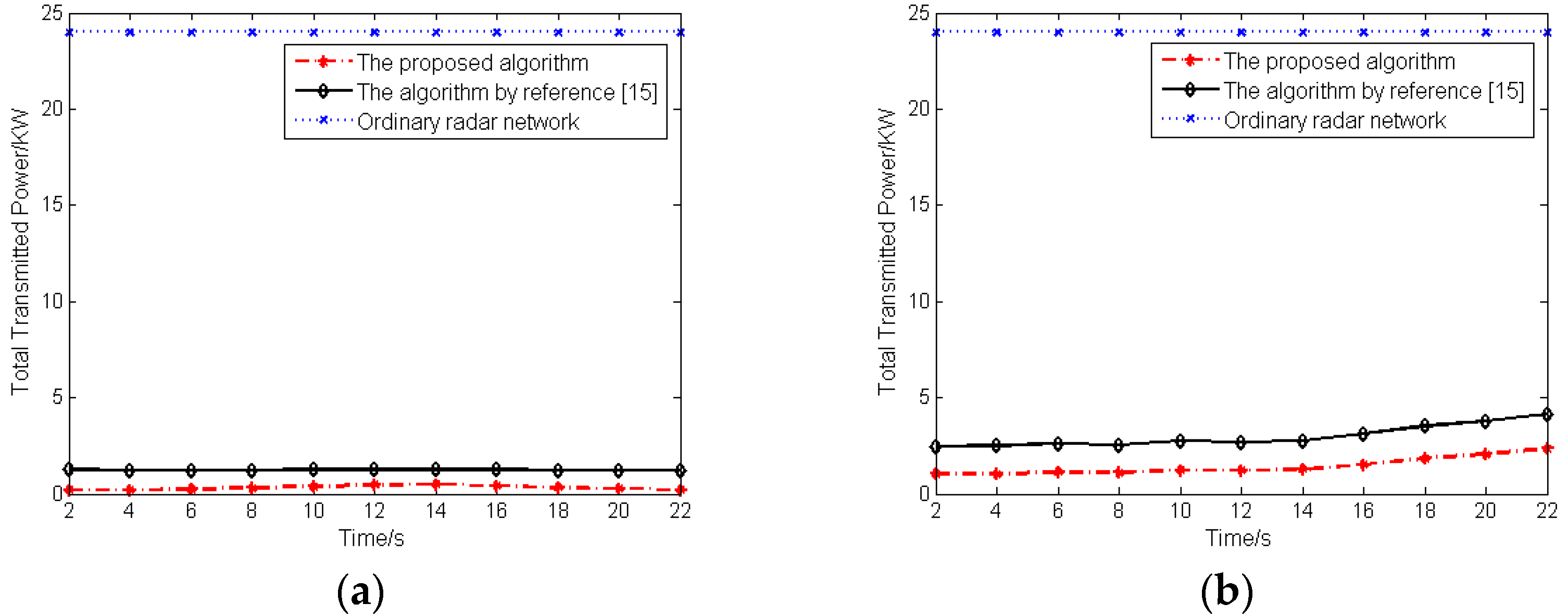
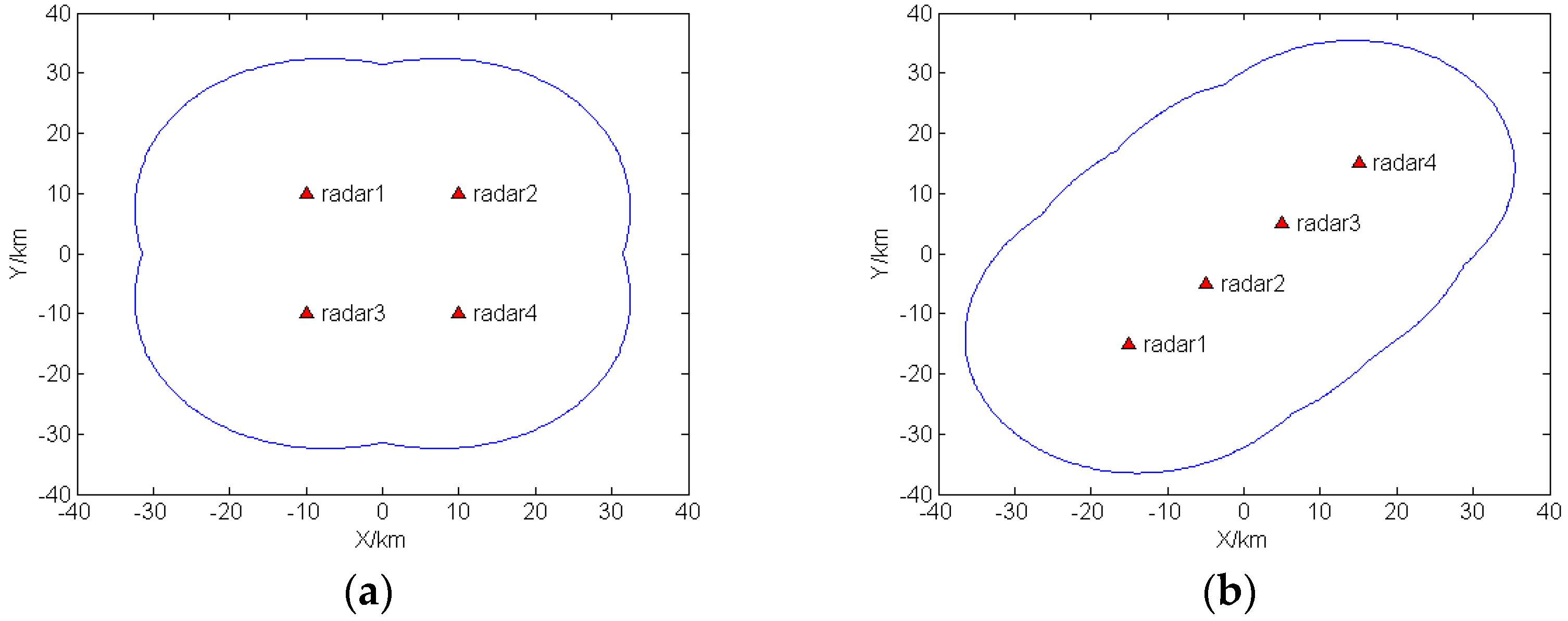
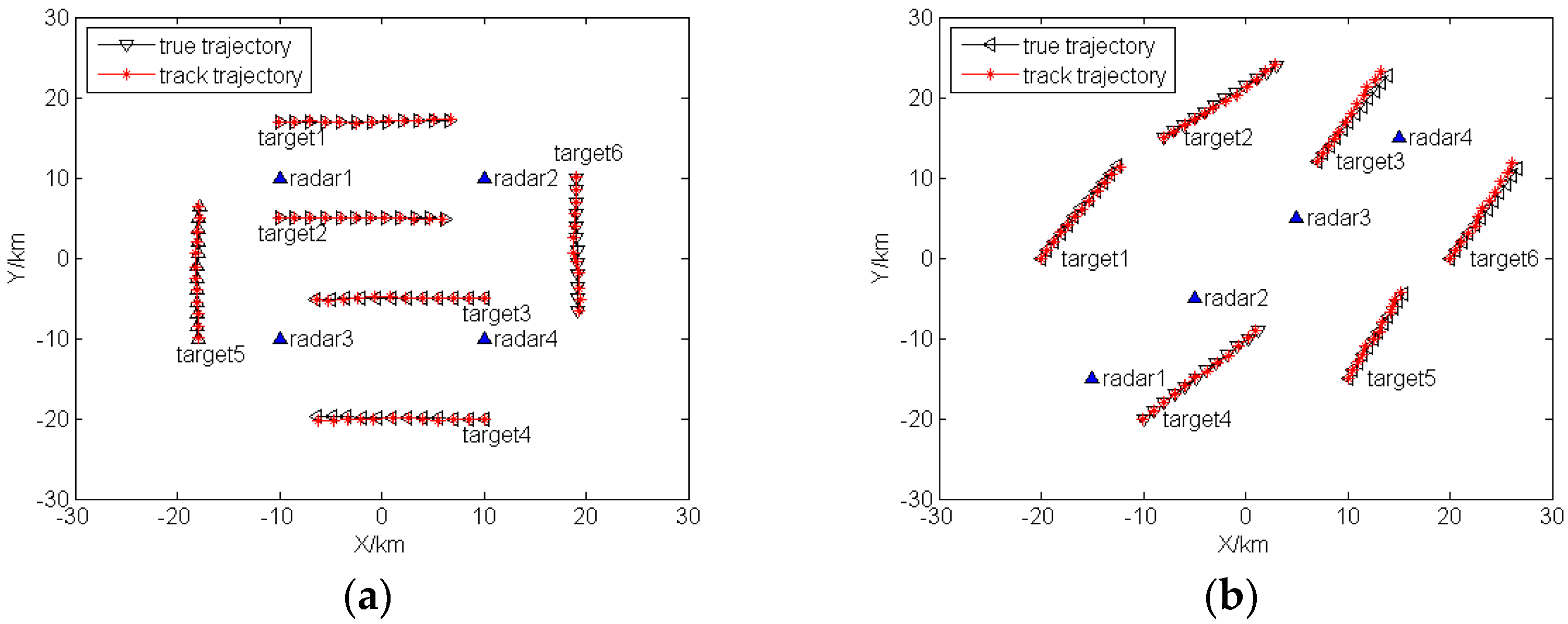
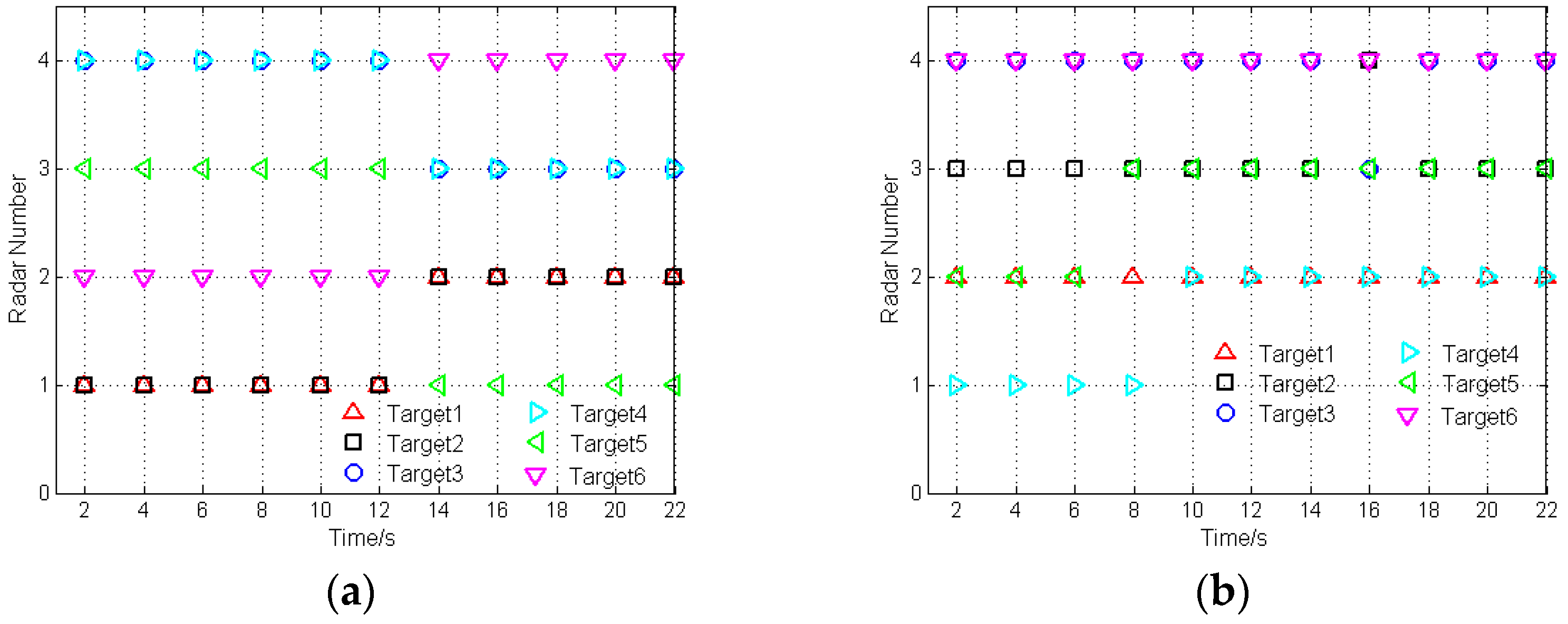
5. Numerical Simulations
6. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Baker, C.J.; Hume, A.L. Netted radar sensing. IEEE Aerosp. Electron. Syst. Mag. 2003, 18, 3–6. [Google Scholar] [CrossRef]
- Haimovich, A.M.; Blum, R.S.; Cimini, L.J. MIMO radar with widely separated antennas. IEEE Signal Process. Mag. 2008, 25, 116–129. [Google Scholar] [CrossRef]
- Wei, Y.; Meng, H.; Liu, X. Extended target recognition in cognitive radar networks. Sensors 2010, 10, 10181–10197. [Google Scholar] [CrossRef] [PubMed]
- Gao, H.; Wang, J.; Jian, C.; Zhang, X. Antenna allocation in MIMO radar with widely separated antennas for multi-target detection. Sensors 2014, 14, 20165–20187. [Google Scholar] [CrossRef] [PubMed]
- Alirezaei, G.; Taghizadeh, O.; Mathar, R. Optimum Power Allocation in Sensor Networks for Active Radar Applications. IEEE Trans. Wirel. Commun. 2015, 14, 2854–2867. [Google Scholar] [CrossRef]
- Alirezaei, G.; Mathar, R. Sensitivity analysis of optimum power allocation in sensor networks that perform object classification. Aust. J. Electr. Electron. Eng. 2015, 12, 267–274. [Google Scholar]
- Ciuonzo, D.; De Maio, A.; Orlando, D. A Unifying Framework for Adaptive Radar Detection in Homogeneous Plus Structured Interference—Part I: On the Maximal Invariant Statistic. IEEE Trans. Signal Process. 2016, 64, 2894–2906. [Google Scholar] [CrossRef]
- Ciuonzo, D.; De Maio, A.; Orlando, D. A Unifying Framework for Adaptive Radar Detection in Homogeneous plus Structured Interference—Part II: Detectors Design. IEEE Trans. Signal Process. 2016, 64, 2907–2919. [Google Scholar] [CrossRef]
- Ciuonzo, D.; De Maio, A.; Orlando, D. On the Statistical Invariance for Adaptive Radar Detection in Partially-homogeneous Disturbance plus Structured Interference. IEEE Trans. Signal Process. 2016. [Google Scholar] [CrossRef]
- Schleher, D.C. LPI radar: Fact or fiction. IEEE Aerosp. Electron. Syst. Mag. 2006, 21, 3–6. [Google Scholar] [CrossRef]
- Lynch, D. Introduction to RF Stealth; SciTech Publishing Inc.: Hawthorne, CA, USA, 2004; pp. 1–59. [Google Scholar]
- Blunt, S.D.; Yatham, P.; Stiles, J. Intrapulse radar-embedded communications. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 1185–1200. [Google Scholar] [CrossRef]
- Ciuonzo, D.; De Maio, A.; Foglia, G.; Piezzo, M. Intrapulse radar-embedded communications via multiobjective optimization. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 2960–2974. [Google Scholar] [CrossRef]
- Ciuonzo, D.; De Maio, A.; Foglia, G.; Piezzo, M. Pareto-theory for enabling covert intrapulse radar-embedded communications. In Proceedings of the 2015 IEEE Radar Conference (RadarCon), Arlington, TX, USA, 10–15 May 2015; pp. 292–297.
- Shi, C.; Zhou, J.; Wang, F.; Chen, J. Mutual information–based LPI optimization for radar network. Int. J. Electron. 2015, 102, 1114–1131. [Google Scholar] [CrossRef]
- Shi, C.; Zhou, J.; Wang, F. Minimum mean square error based low probability of intercept optimization for radar network. In Proceedings of the IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Guilin, China, 5–8 August 2014; pp. 10–13.
- Narykov, A.S.; Krasnov, O.A.; Yarovoy, A. Algorithm for resource management of multiple phased array radars for target tracking. In Proceedings of the 16th International Conference on Information Fusion, Istanbul, Turkey, 9–12 July 2013; pp. 1258–1264.
- Narykov, A.S.; Yarovoy, A. Sensor selection algorithm for optimal management of the tracking capability in multisensor radar system. In Proceedings of the European Radar Conference (EuRAD), Nuremberg, Germany, 9–11 October 2013; pp. 1811–1814.
- Chavali, P.; Nehorai, A. Scheduling and power allocation in a cognitive radar network for multiple-target tracking. IEEE Trans. Signal Process. 2011, 60, 715–729. [Google Scholar] [CrossRef]
- Godrich, H.; Petropulu, A.P.; Poor, H.V. Cluster allocation schemes for target tracking in multiple radar architecture. In Proceedings of the Conference Record of the Forty Fifth Asilomar Conference on Signals, Systems and Computers (ASILOMAR), Pacific Grove, CA, USA, 6–9 November 2011; pp. 863–867.
- Andargoli, S.M.H.; Malekzadeh, J. Target assignment and power allocation for LPI radar networks. In Proceedings of the International Symposium on Artificial Intelligence and Signal Processing (AISP), Mashhad, Iran, 3–5 March 2015; pp. 234–239.
- Xie, M.; Yi, W.; Kong, L. Joint node selection and power allocation for multitarget tracking in decentralized radar networks. In Proceedings of the 19th International Conference on Information Fusion, Heidelberg, Germany, 5–8 July 2016; pp. 45–52.
- Denoeux, T. A k-nearest neighbor classification rule based on Dempster-Shafer theory. IEEE Trans. Syst. Man Cybern. 1995, 25, 804–813. [Google Scholar] [CrossRef]
- Gustafsson, F. Particle filter theory and practice with positioning applications. IEEE Trans. Syst. Man Cybern. 2010, 25, 53–82. [Google Scholar] [CrossRef]
- Lewandowski, W.; Azoubib, J.; Klepczynski, W.J. GPS: Primary tool for time transfer. Proc. IEEE 1999, 87, 163–172. [Google Scholar] [CrossRef]
- Teng, Y.; Griffiths, H.D.; Baker, C.J. Netted radar sensitivity and ambiguity. IET Radar Sonar Navig. 2007, 1, 479–486. [Google Scholar] [CrossRef]
- Song, X.F.; Peter, W.; Zhou, S.L. Optimal power allocation for MIMO radars with heterogeneous propagation losses. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Kyoto, Japan, 25–30 March 2012; pp. 2465–2468.
- Fishler, E.; Haimovich, A.; Blum, R.S.; Cimini, L.J.; Chizhik, D.; Valenzuela, R.A. Spatial diversity in radars-models and detection performance. IEEE Trans. Signal Process. 2006, 54, 823–838. [Google Scholar] [CrossRef]
- Yang, Y.; Blum, R.S. MIMO radar waveform design based on mutual information and minimum mean-square error estimation. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 330–343. [Google Scholar] [CrossRef]
- Cover, T.M.; Gamal, A. An information-theoretic proof of Hadamard’s inequality. IEEE Trans. Inf. Theory 1983, 29, 930–931. [Google Scholar] [CrossRef]
- Cheney, W.; Kincaid, D. Numerical Mathematics and Computing, 7th ed.; Brooks/Cole: Boston, MA, USA, 2013; p. 763. [Google Scholar]
- Danielsson, P.E. Euclidean distance mapping. Comput. Graph. Image Process. 1980, 14, 227–248. [Google Scholar] [CrossRef]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Minimum Transmitted Power | Targets | ||||
|---|---|---|---|---|---|
| ... | |||||
| Radars | … | ||||
| … | |||||
| ... | ... | ... | ... | ||
| … | |||||
| Sensor Selection Index | Targets | ||||
|---|---|---|---|---|---|
| ... | |||||
| Radars | … | ||||
| … | |||||
| ... | ... | ... | ... | ||
| … | |||||
| Single Radar Maximum Peak Power | Radar Transmitted Antenna Gain | Radar Received Antenna Gain | Radar Frequency | Radar Band Width | Radar System Loss |
|---|---|---|---|---|---|
| 6 KW | 30 dB | 30 dB | 3 GHz | 1 MHz | 5 dB |
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
She, J.; Wang, F.; Zhou, J. A Novel Sensor Selection and Power Allocation Algorithm for Multiple-Target Tracking in an LPI Radar Network. Sensors 2016, 16, 2193. https://doi.org/10.3390/s16122193
She J, Wang F, Zhou J. A Novel Sensor Selection and Power Allocation Algorithm for Multiple-Target Tracking in an LPI Radar Network. Sensors. 2016; 16(12):2193. https://doi.org/10.3390/s16122193
Chicago/Turabian StyleShe, Ji, Fei Wang, and Jianjiang Zhou. 2016. "A Novel Sensor Selection and Power Allocation Algorithm for Multiple-Target Tracking in an LPI Radar Network" Sensors 16, no. 12: 2193. https://doi.org/10.3390/s16122193
APA StyleShe, J., Wang, F., & Zhou, J. (2016). A Novel Sensor Selection and Power Allocation Algorithm for Multiple-Target Tracking in an LPI Radar Network. Sensors, 16(12), 2193. https://doi.org/10.3390/s16122193