
Broadband Cooperative Spectrum Sensing Based on Distributed Modulated Wideband Converter

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
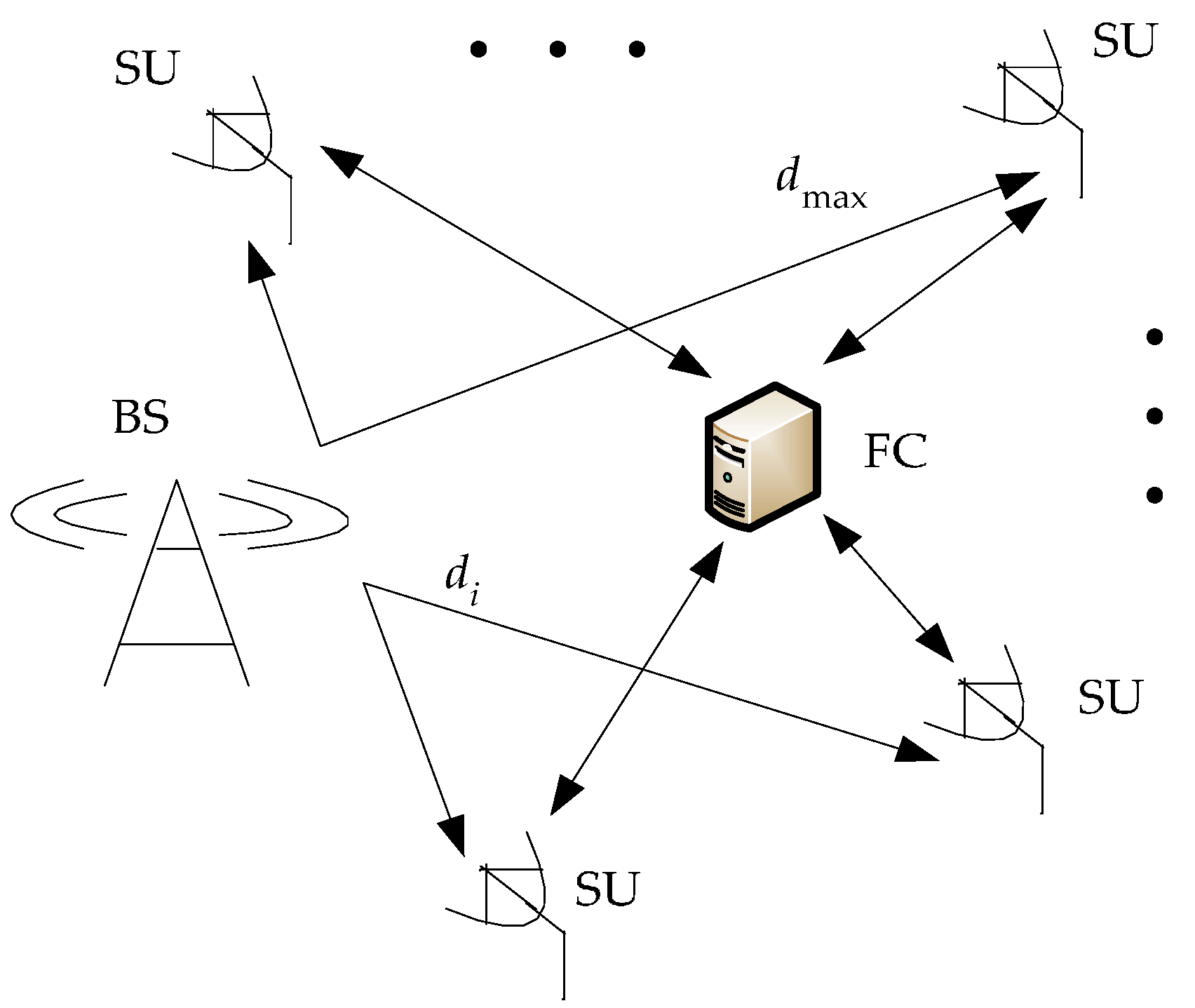
2. Cooperative Spectrum Sensing Model
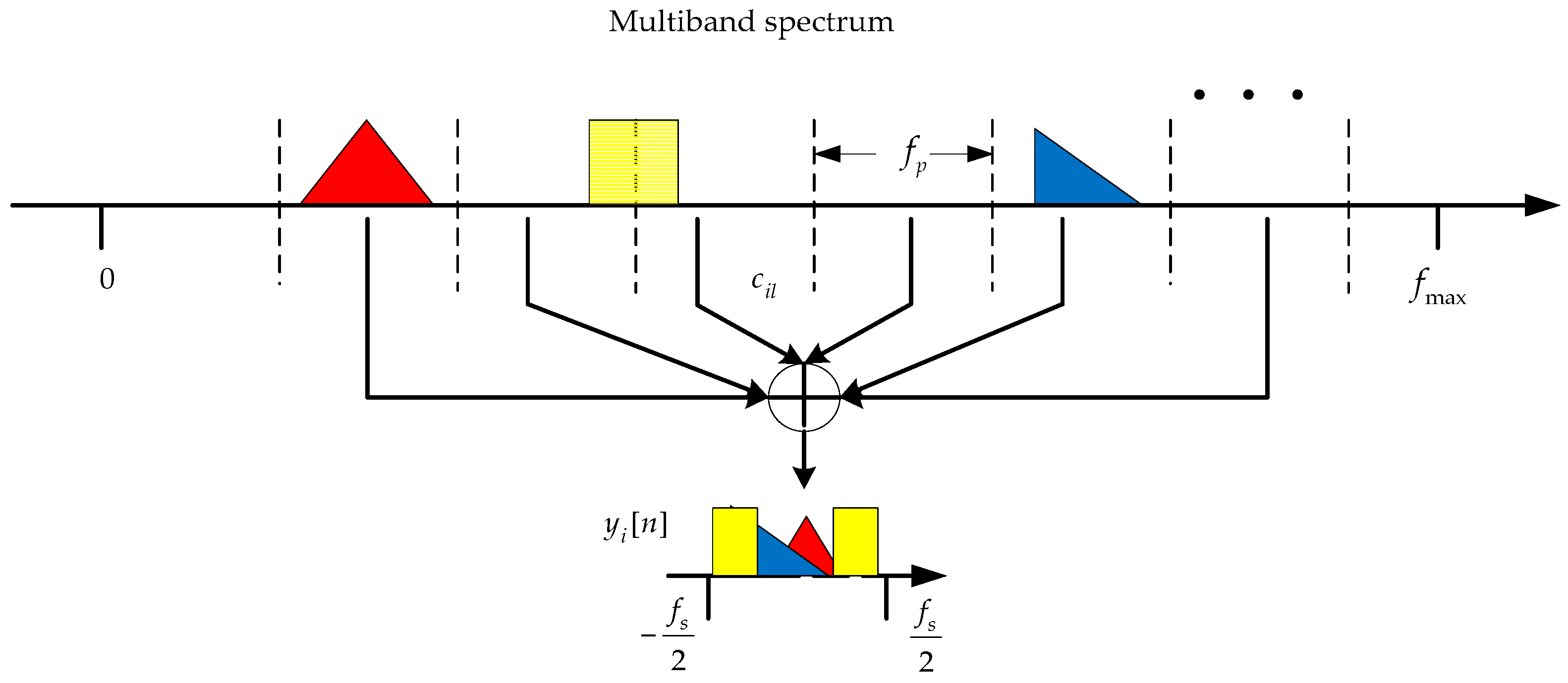
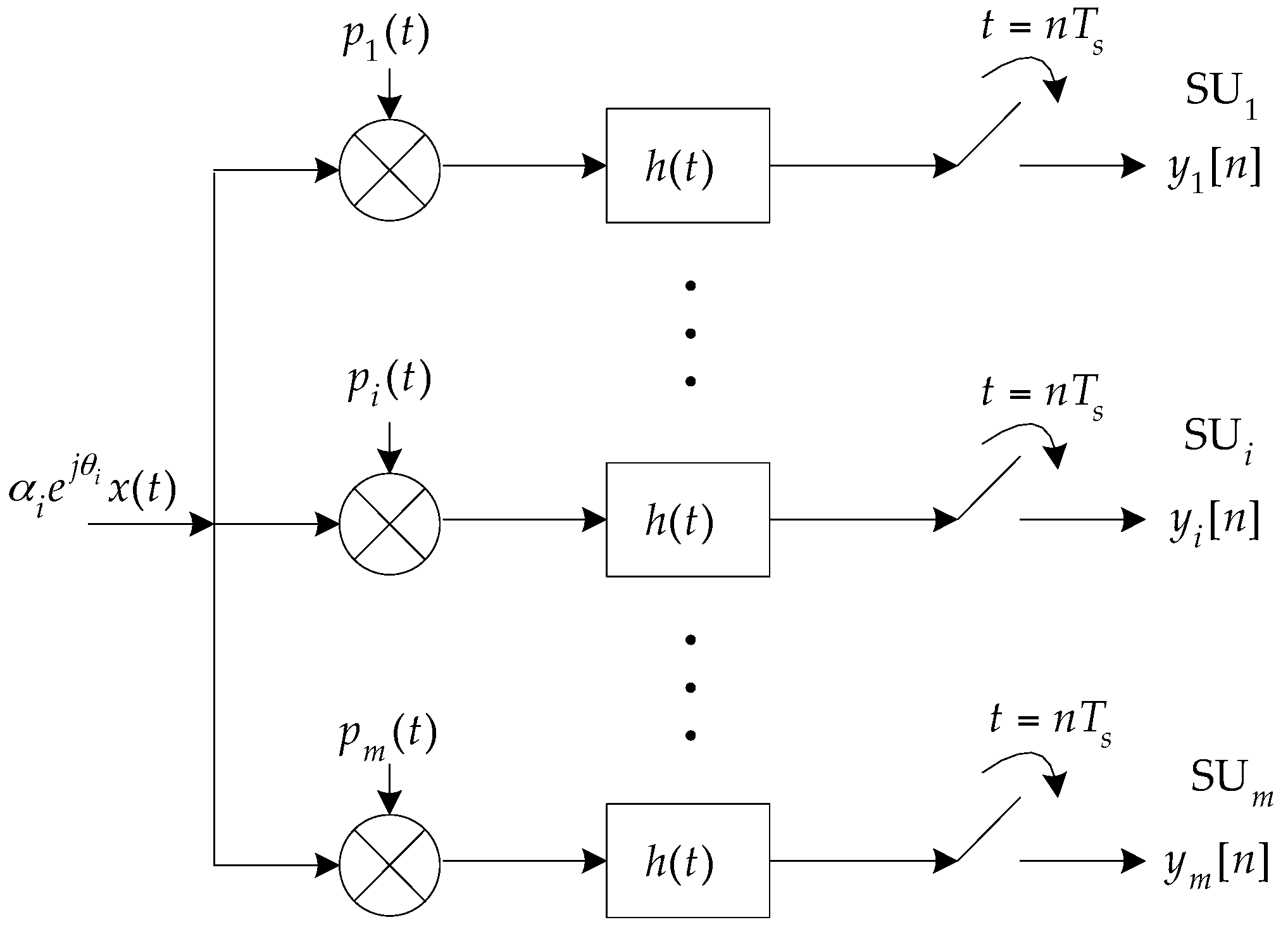
3. Distributed Modulated Wideband Converter
3.1. Phase Shift
3.2. Transmission Loss
3.3. Three-Time Handshake Mechanism
4. Numerical Simulations and Discussion
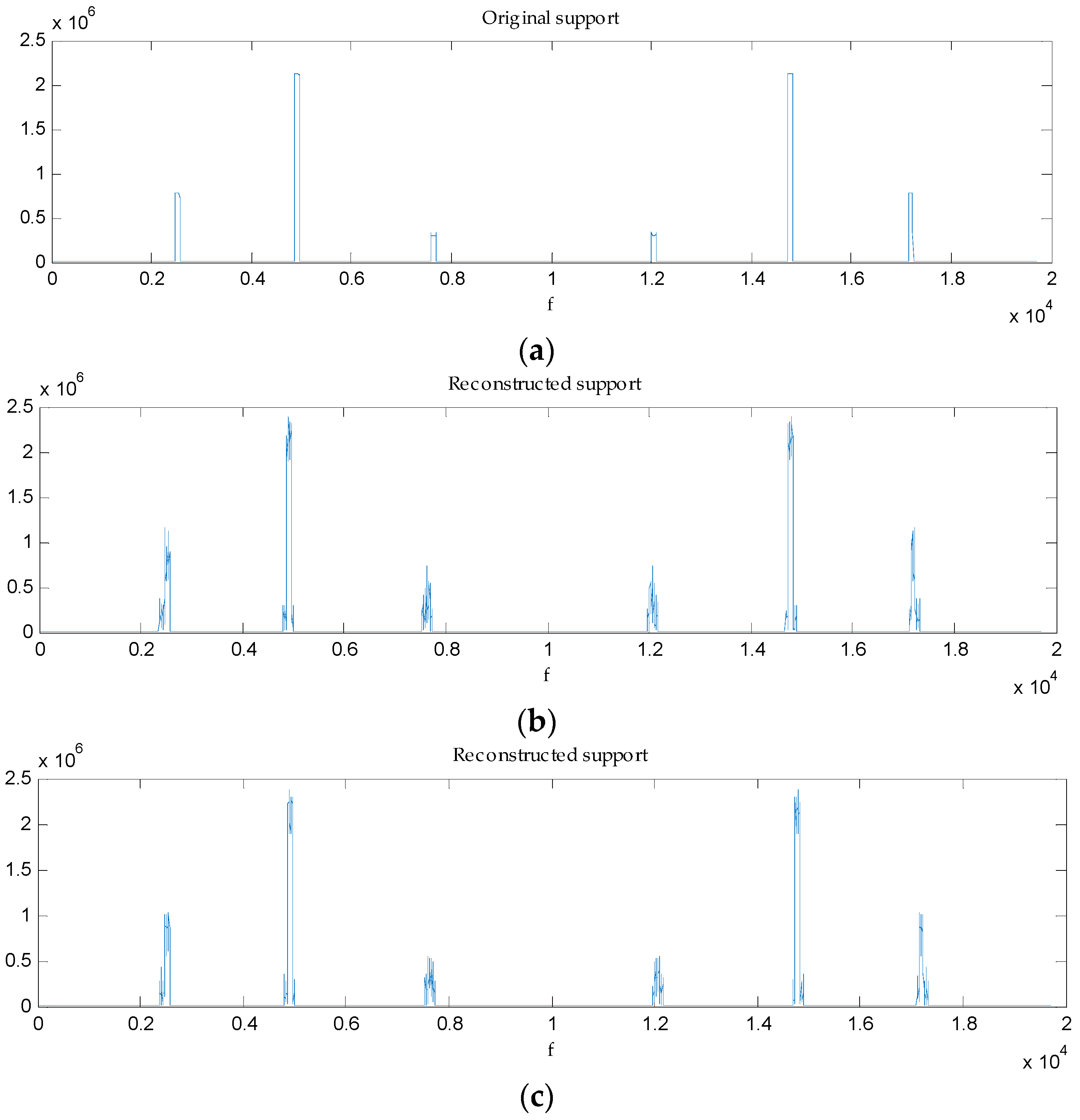
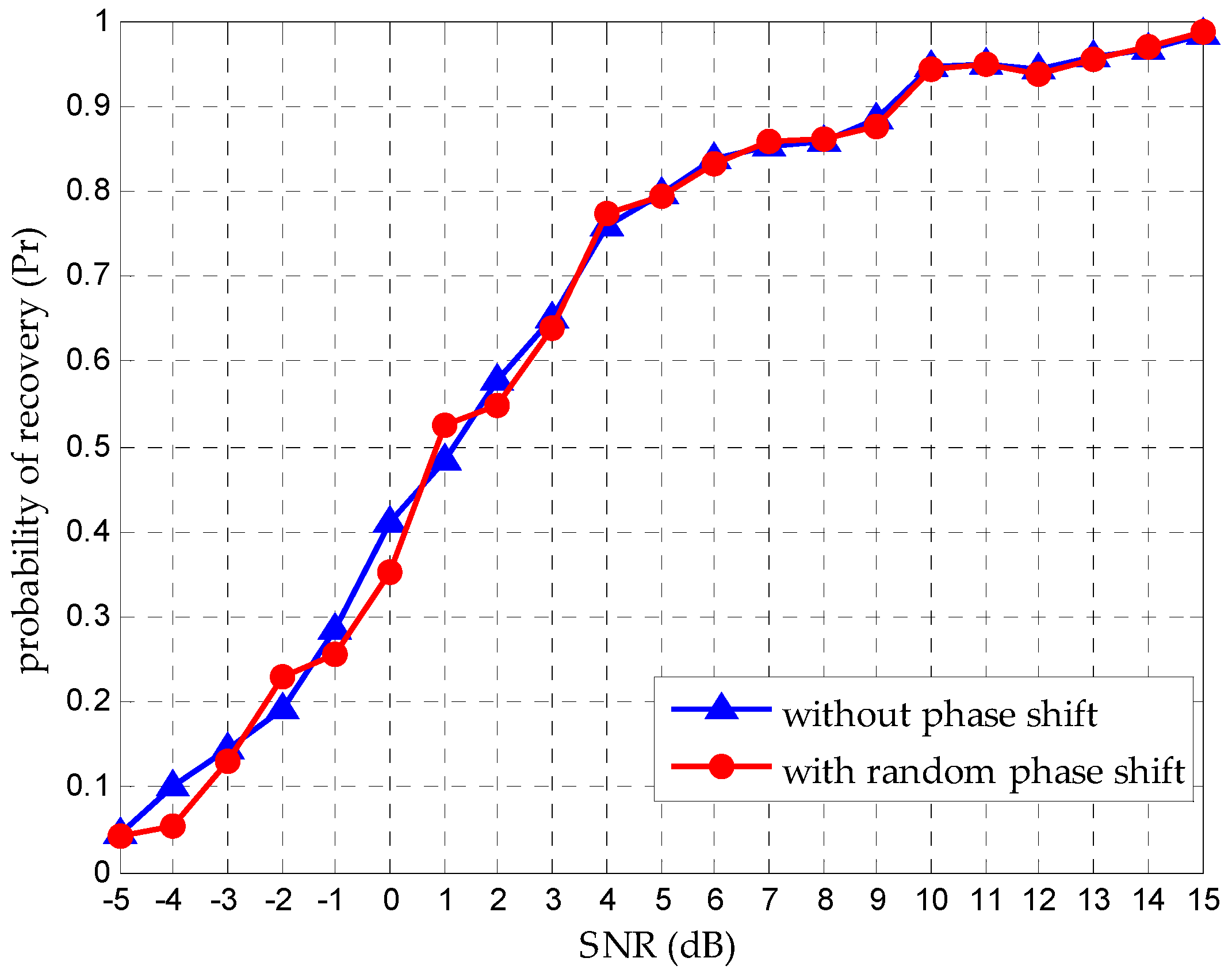
4.1. Support Recovery with Random
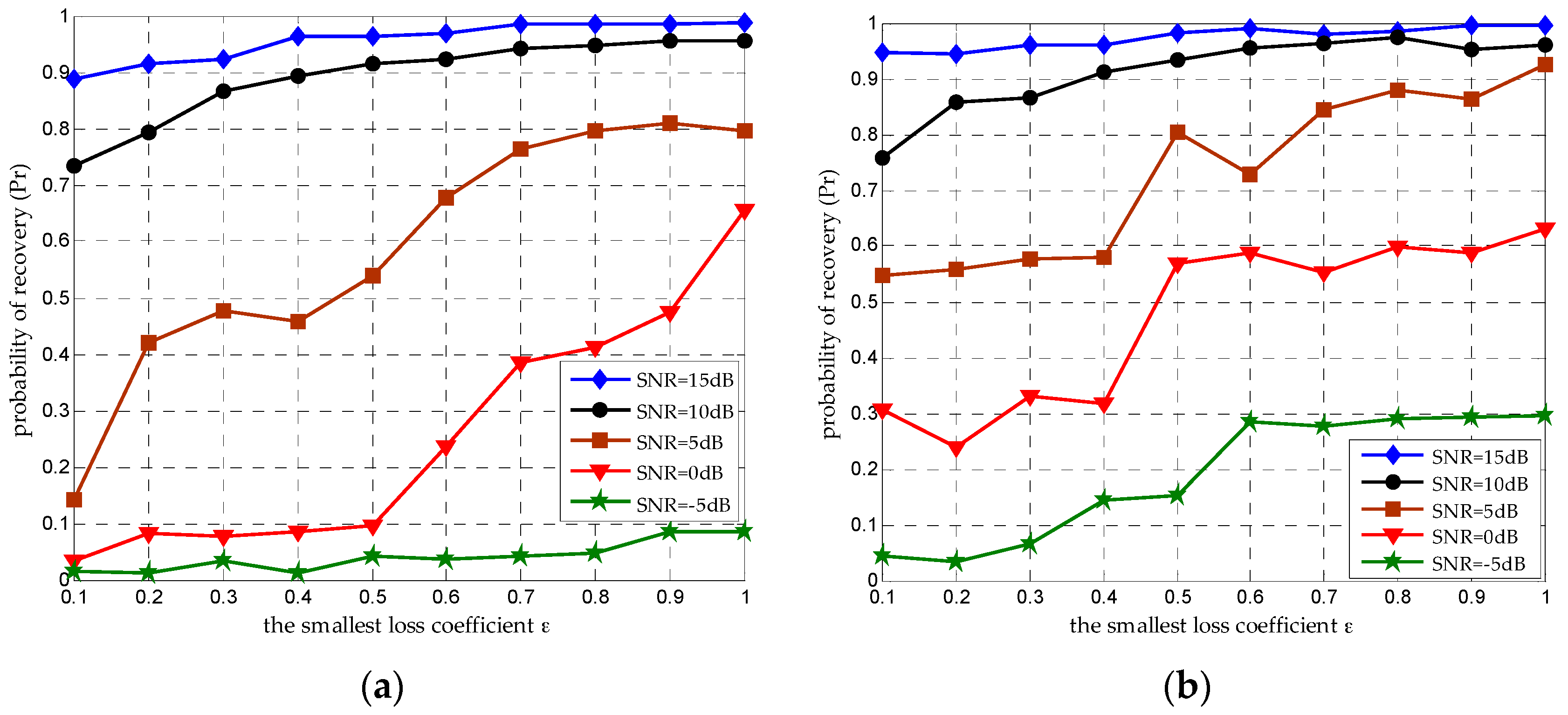
4.2. Seeking an Acceptable
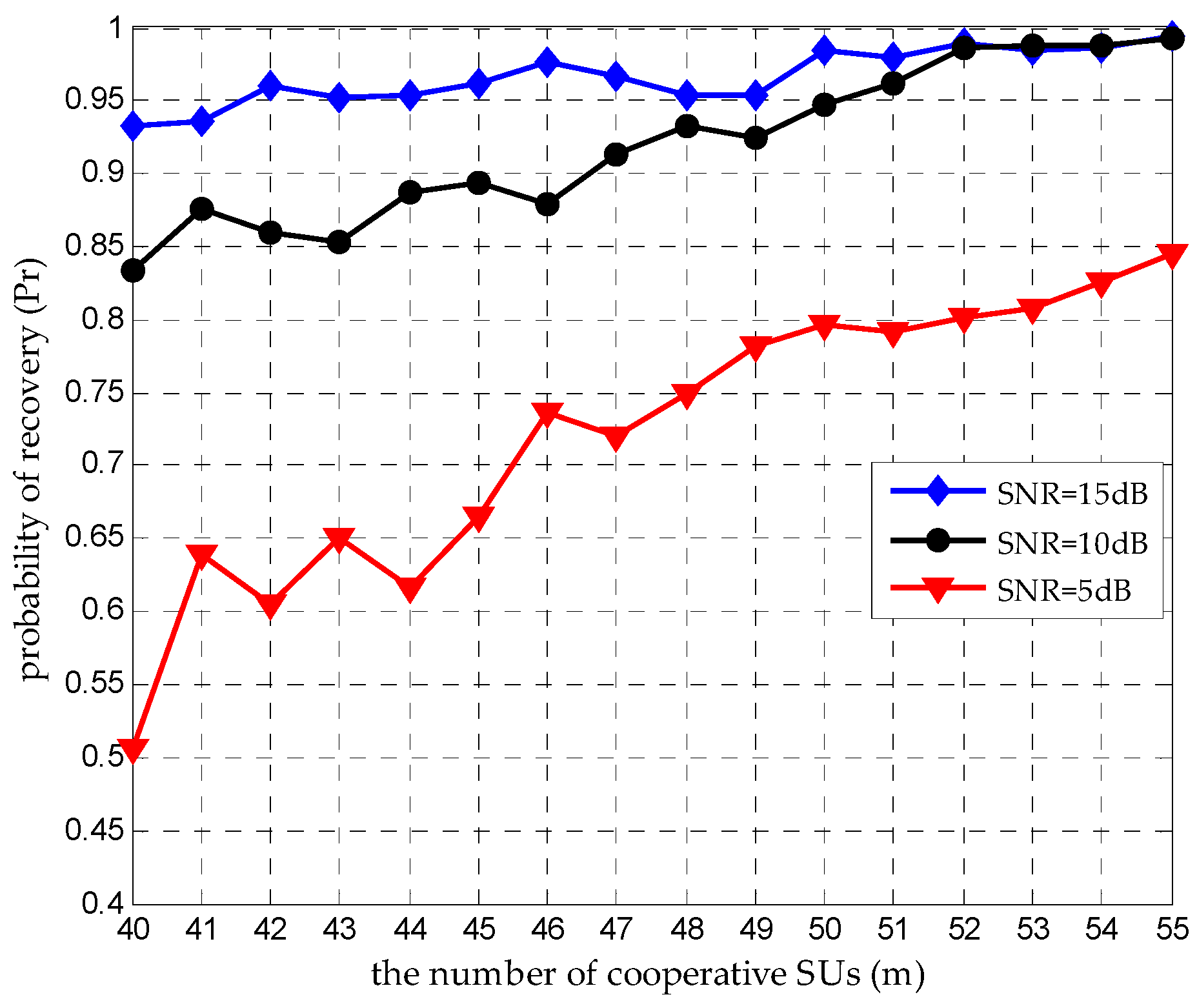
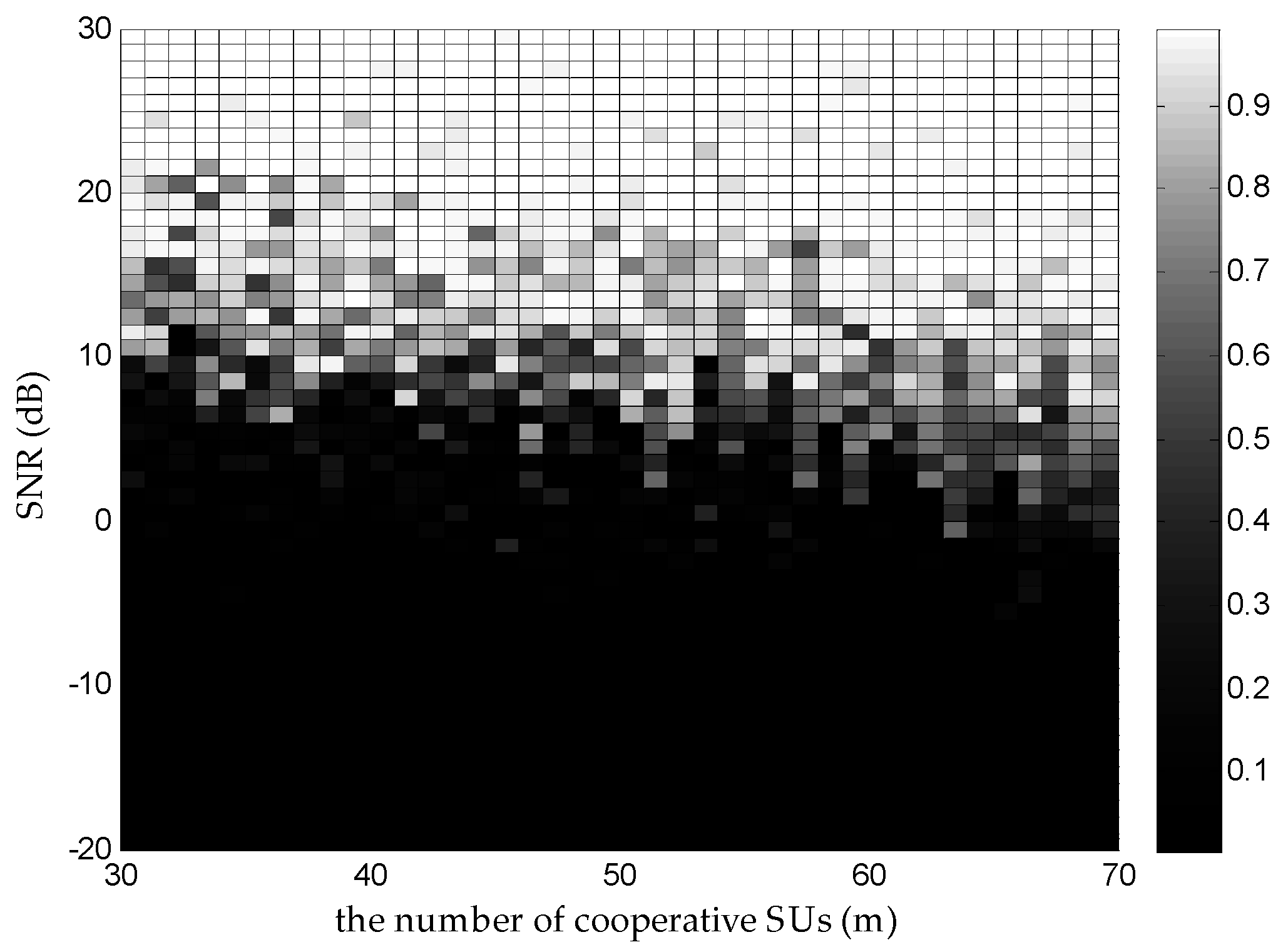
4.3. Increasing to Improve
4.4. Time-Varying Support Problem
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Mitola, I.J. Software radios: Survey, critical evaluation and future directions. IEEE J. Aerosp. Electron. Syst. Mag. 1993, 8, 25–36. [Google Scholar] [CrossRef]
- Haykin, S. Cognitive radio: Brain-empowered wireless communications. IEEE J. Sel. Areas Commun. 2005, 23, 201–220. [Google Scholar] [CrossRef]
- Urkowitz, H. Energy detection of unknown deterministic signals. Proc. IEEE 1967, 55, 523–531. [Google Scholar] [CrossRef]
- Tian, Z.; Sadler, B.M.; Tafesse, Y. Cyclic feature detection with sub-Nyquist sampling for wideband spectrum sensing. IEEE J. Sel. Top. Signal Process. 2012, 6, 58–69. [Google Scholar] [CrossRef]
- Cohen, D.; Eldar, Y.C.; Rebeiz, E.; Cabric, D. Cyclostationary detection from sub-Nyquist samples for Cognitive Radios: Model reconciliation. In Proceedings of the 2013 5th IEEE International Workshop on Computational Advances in Multi-Sensor Adaptive Processing, Saint Martin, France, 15 December 2013; pp. 384–387.
- Turin, G.L. An introduction to matched filters. IRE Trans. Inf. Theory 1960, 6, 311–329. [Google Scholar] [CrossRef]
- Zhang, X.Z.; Chai, R.; Gao, F.F. Matched filter based spectrum sensing and power level detection for cognitive radio network. In Proceedings of the 2014 IEEE Global Conference on Signal and Information Processing, Atlanta, GA, USA, 3 December 2014; pp. 1267–1270.
- Tian, Z.; Giannakis, G.B. Compressed sensing for wideband cognitive radios. In Proceedings of the 2007 IEEE International Conference on Acoustics, Speech and Signal Processing, Honolulu, HI, USA, 15 April 2007; pp. 1357–1360.
- Yue, W.; Tian, Z.; Chunyan, F. A two-step compressed spectrum sensing scheme for wideband cognitive radios. In Proceedings of the 2010 IEEE Global Telecommunications Conference, Orlando, FL, USA, 5 December 2010.
- Ma, J.; Zhao, G.; Li, Y. Soft combination and detection for cooperative spectrum sensing in cognitive radio networks. IEEE Trans. Wirel. Commun. 2008, 7, 4502–4507. [Google Scholar]
- Zhang, W.; Mallik, R.; Letaief, K. Optimization of cooperative spectrum sensing with energy detection in cognitive networks. IEEE Trans. Wirel. Commun. 2009, 8, 5761–5766. [Google Scholar] [CrossRef]
- Jayaprakash, R.; Visa, K. Cooperative game-theoretic approach to spectrum sharing in cognitive radios. Signal Process. 2015, 106, 15–29. [Google Scholar]
- Sarvotham, S.; Baron, D.; Wakin, M.; Duarte, M.F.; Baraniuk, R.G. Distributed compressed sensing of jointly sparse signals. In Proceedings of the 2005 39th Asilomar Conference on Signals, Systems and Computers, Pacific Grove, CA, USA, 28 October 2005; pp. 1537–1541.
- Mishali, M.; Eldar, Y.C. From theory to practice: Sub-Nyquist sampling of sparse wideband analog signals. IEEE. J. Sel. Top. Signal Process. 2010, 4, 375–391. [Google Scholar] [CrossRef]
- Mishali, M.; Eldar, Y.C.; Dounaevsky, O.; Shoshan, E. Xampling: Analog to digital sub-Nyquist rates. IET Circuits Devices Syst. 2011, 5, 8–20. [Google Scholar] [CrossRef]
- Tandra, R.; Sahai, A. SNR walls for signal detection. IEEE J. Sel. Top. Signal Process. 2008, 2, 4–17. [Google Scholar] [CrossRef]
- Oude Alink, M.S.; Korreler, A.B.J.; Klumperink, E.A.M.; Smit, G.J.M.; Nauta, B. Lowering the SNR wall for energy detection using cross-correlation. IEEE Trans. Veh. Technol. 2011, 60, 3748–3757. [Google Scholar] [CrossRef]
- Tropp, J.A.; Gilbert, A.C. Signal recovery from random measurements via orthogonal matching pursuit. IEEE Trans. Veh. Technol. 2007, 53, 4655–4666. [Google Scholar] [CrossRef]
- Rappaport, T.S. Wireless Communications: Principles and Practice, 2nd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2001. [Google Scholar]
- Herley, C.; Wong, P.W. Minimum rate sampling and reconstruction of signals with arbitrary frequency support. IEEE Trans. Inf. Theory 1999, 45, 1555–1564. [Google Scholar] [CrossRef]
- Venkataramani, R.; Bresler, Y. Perfect reconstruction formulas and bounds on aliasing error in sub-Nyquist nonuniform sampling of multiband signals. IEEE Trans. Inf. Theory 2000, 46, 2173–2183. [Google Scholar] [CrossRef]
- Donoho, D.L. Compressed sensing. IEEE Trans. Inf. Theory 2006, 52, 1289–1306. [Google Scholar] [CrossRef]
- Goyal, V.K.; Fletcher, A.K.; Rangan, S. Compressive sampling and lossy compression. IEEE Signal Process. Mag. 2008, 25, 48–56. [Google Scholar] [CrossRef]
- Jian, W. Support recovery with orthogonal matching pursuit in the presence of noise. IEEE Trans. Signal Process. 2015, 63, 5868–5877. [Google Scholar]
- Baraniuk, R.; Davenport, M.; Devore, R.; Wakin, M. A simple proof of the restricted isometry property for random matrices. Constr. Approx. 2008, 28, 253–263. [Google Scholar] [CrossRef]
© 2016 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC-BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, Z.; Li, Z.; Li, J. Broadband Cooperative Spectrum Sensing Based on Distributed Modulated Wideband Converter. Sensors 2016, 16, 1602. https://doi.org/10.3390/s16101602
Xu Z, Li Z, Li J. Broadband Cooperative Spectrum Sensing Based on Distributed Modulated Wideband Converter. Sensors. 2016; 16(10):1602. https://doi.org/10.3390/s16101602
Chicago/Turabian StyleXu, Ziyong, Zhi Li, and Jian Li. 2016. "Broadband Cooperative Spectrum Sensing Based on Distributed Modulated Wideband Converter" Sensors 16, no. 10: 1602. https://doi.org/10.3390/s16101602
APA StyleXu, Z., Li, Z., & Li, J. (2016). Broadband Cooperative Spectrum Sensing Based on Distributed Modulated Wideband Converter. Sensors, 16(10), 1602. https://doi.org/10.3390/s16101602