
Initial Alignment of Large Azimuth Misalignment Angles in SINS Based on Adaptive UPF


Abstract
:1. Introduction
2. Nonlinear Error Model of SINS
- i frame—geocentric inertial coordinate, the origin is at the center of the Earth , the xi axis points at equinox, the zi axis is along the Earth’s axis of rotation, the yi axis and the xi axis, the zi axis constitute the right-handed coordinate system;
- e frame—the Earth coordinate, the origin is at the center of the Earth, the xe axis passes through the intersection of the prime meridian and the equator, the ze axis passes through the North Pole of the Earth, and the ye axis passes through the intersection of the eastern longitude 90° meridian and the equator;
- n frame—the navigation coordinate, here we select the “East-North-Up (ENU)” geographic coordinate system as the navigation coordinate;
- b frame—“Right-Front-Up” coordinate for the SINS coordinate.
2.1. Attitude Error Equation
2.2. Velocity Error Equation
2.3. Initial Alignment Error Model of Large Azimuth Misalignment Angle in SINS
3. UPF and Adaptive UPF
3.1. UPF Algorithm
- Initialization: k = 0; Suppose the initial state variable , the covariance matrix is , we sample particles from the initial probability distribution , for the simplified calculation, let , where and ;
- The forecast and sampling of the weighted particles: k = 1, 2, …; make use of the unscented Kalman filtering for particles to forecast, and calculate σ sampling points:where , , , , n is status dimension;Time updating is:where:, , , and for the normal distribution, ;Measuring updating is:Using the particle generation according to the recommended density function as the second sampling original particles;
- According to the weight value updating formula , the corresponding weight values of N particles are calculated and the normalization processing is performed;
- The original particles are re-sampled by re-sampling algorithms to generate the second sampled particles and their weight values are calculated;
- The optimal estimation of state variables and the corresponding covariance matrix of each particle are calculated according to ;
- The particles after re-sampling in step (4) and calculated in step (5) are substituted in step (2) for the iterative calculation.
3.2. The Adaptive UPF Algorithm in This Paper
- Initialization: k = 0; we sample particles from the initial probability distribution , for the simplified calculation, let , where , ;
- Forecast updating:According to Equations (15) and (19), and are obtained. Then the specific covariance is as follows:
- Judge whether Equation (21) is satisfied or not; if satisfied, skip to the fifth step, otherwise correct in accordance with Equations (22), (23) and (24);
- Measurement updating:
- According to the weight value updating formula , the corresponding weight values of N particles are calculated and normalized;
- The original particles are re-sampled by re-sampling algorithms to generate the second sampled particles and their weight values are calculated;
- The optimal estimation of state variables and corresponding covariance matrix of each particle are calculated according to ;
- The particles after re-sampling in the sixth step and calculated in the seventh step are substituted in the second step for the iterative calculation.
4. Adaptive UPF Filter Influence Factors Analysis
4.1. The Influence of the Importance Probability Density Function on the Accuracy of Adaptive UPF
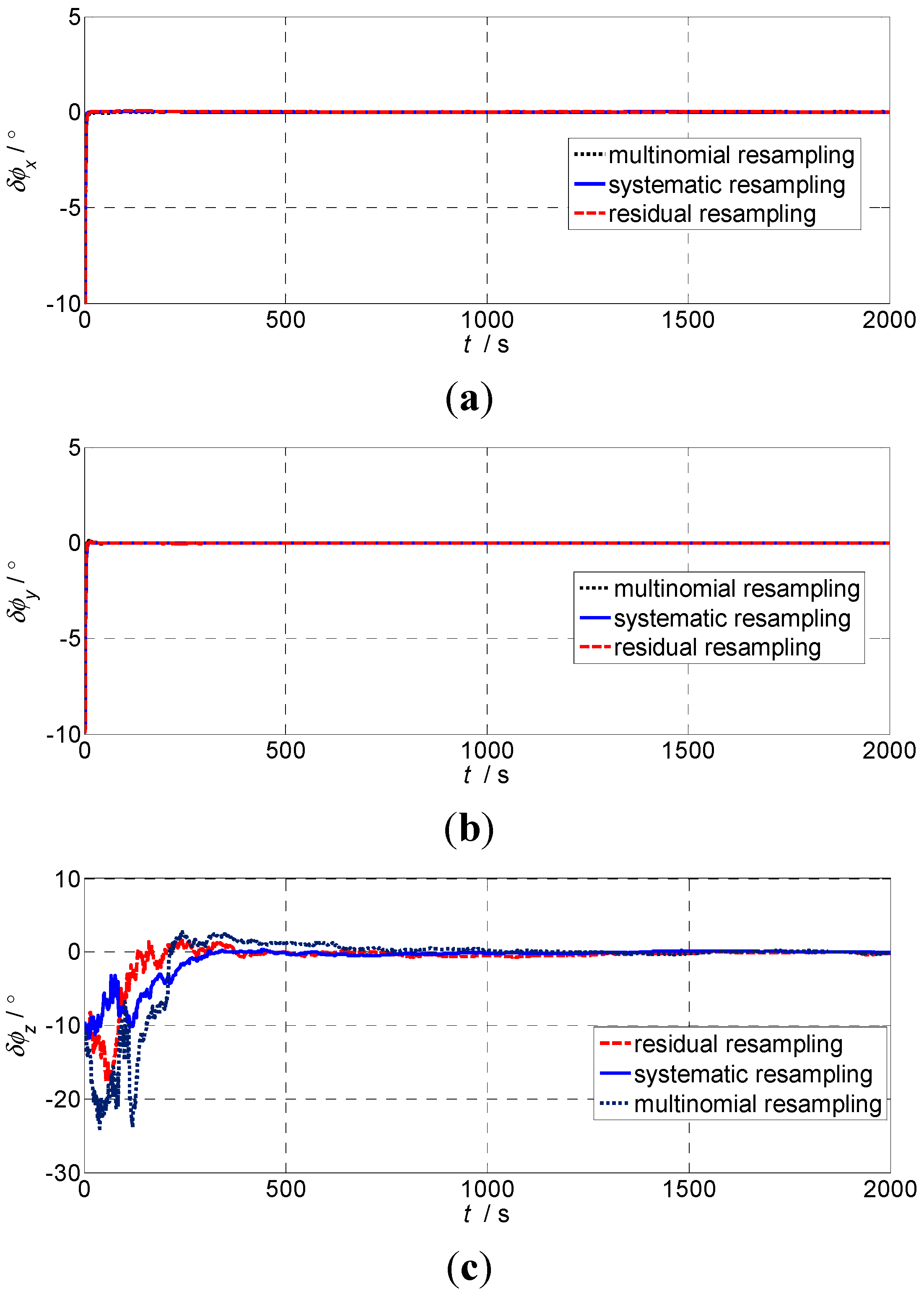
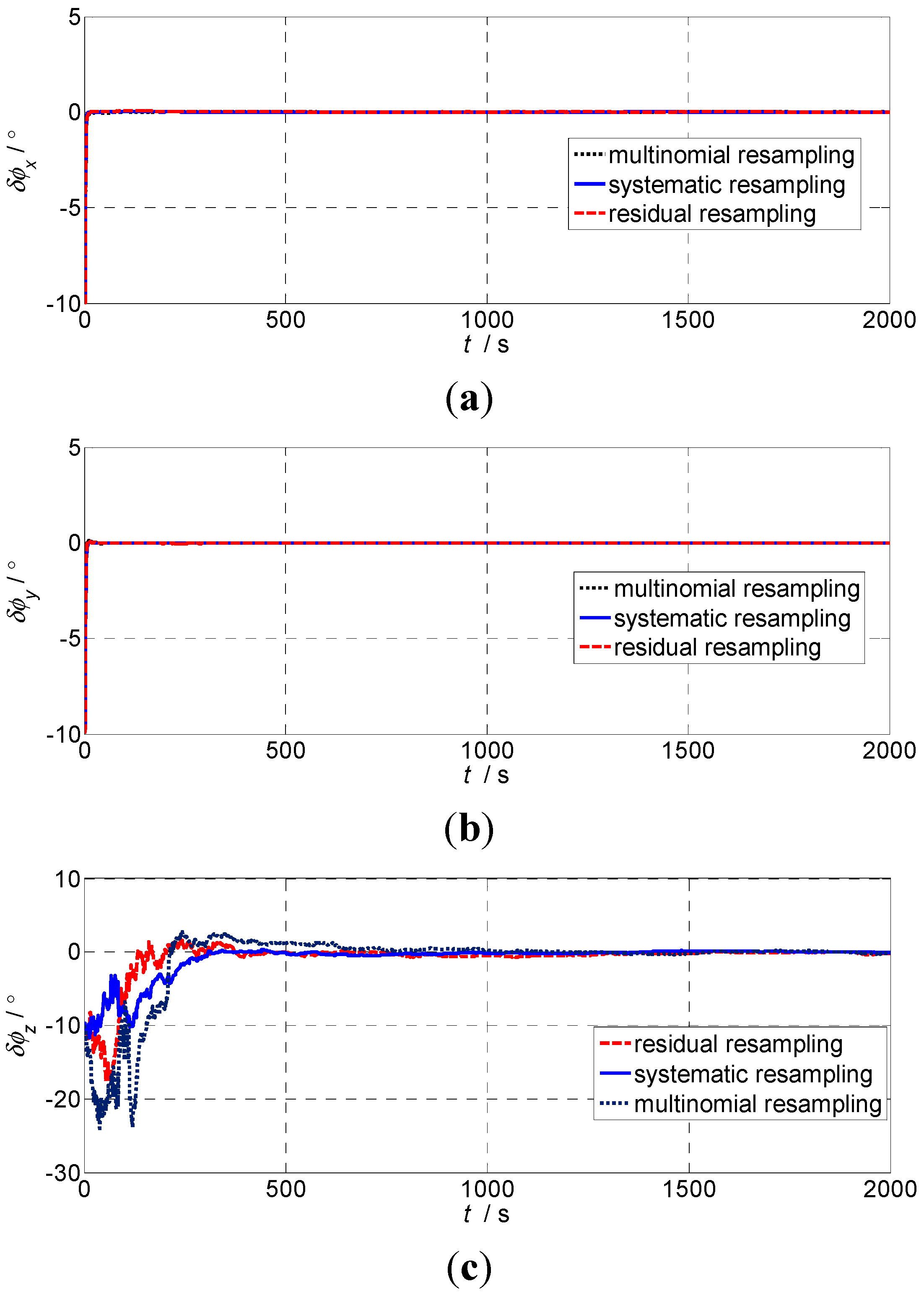
4.2. Influence of Re-Sampling Algorithm on the Filtering Accuracy
5. Simulation and its Analysis
5.1. Simulation Conditions
5.2. Simulation Results and Analysis
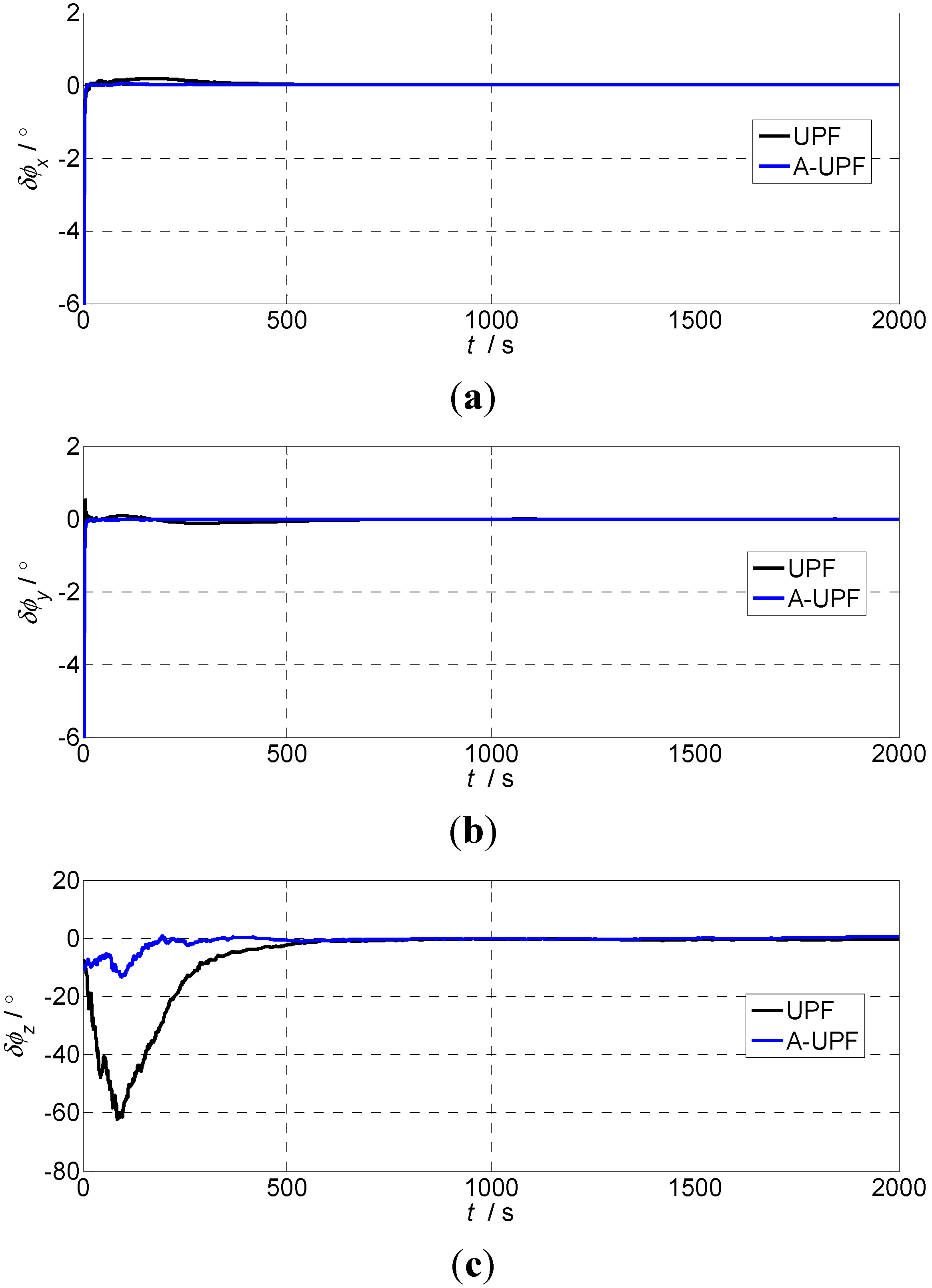
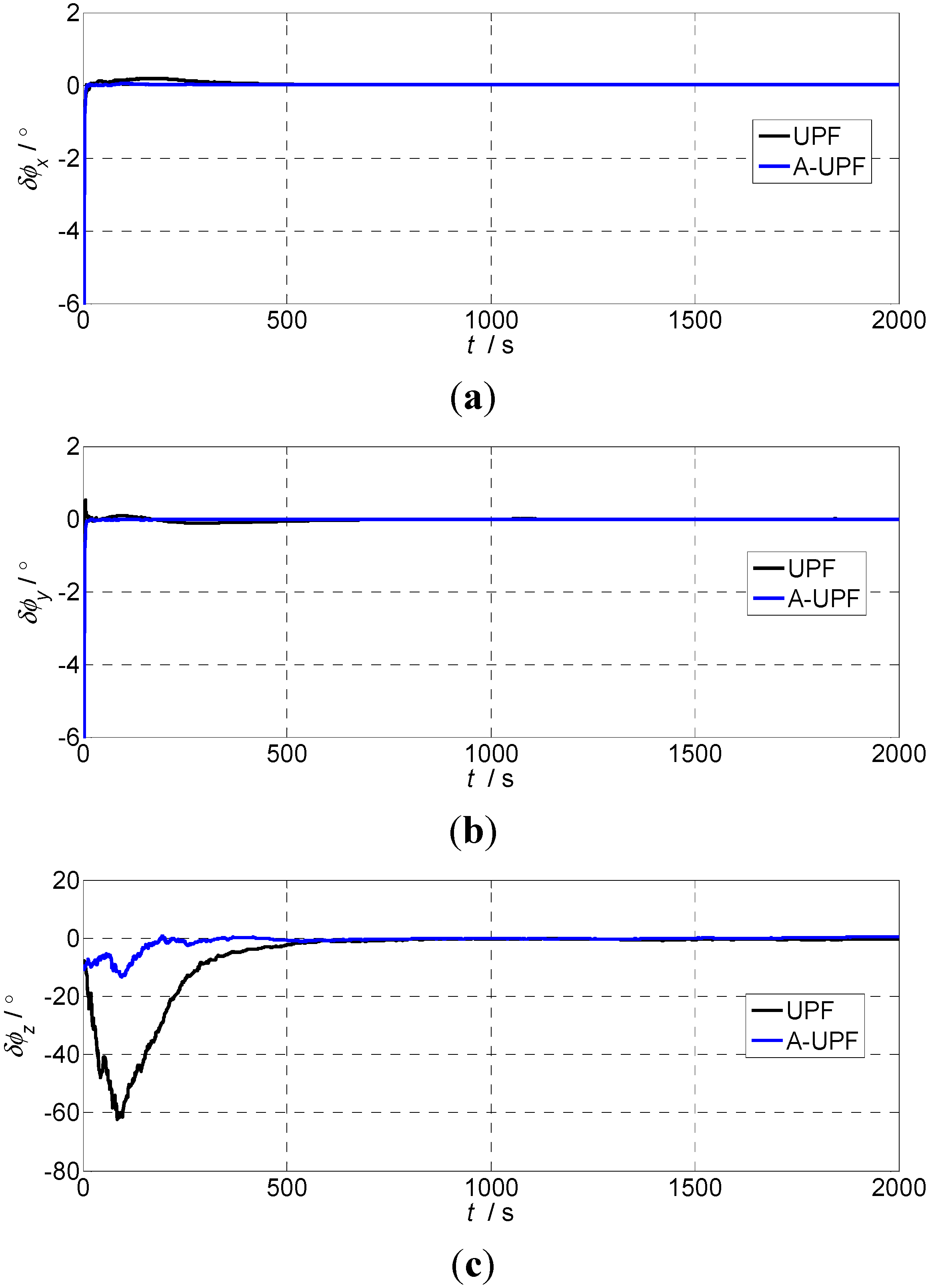
5.2.1. The First Experiment

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Mean/° | Variance/° | |||||
|---|---|---|---|---|---|---|
| Pitch Error | Roll Error | Heading Error | Pitch Error | Rollerror | Heading Error | |
| UPF | 0.0209 | 0.0189 | 1.0983 | 0.0524 | 0.0567 | 2.3819 |
| Adaptive UPF | −0.0181 | 0.0074 | −0.8609 | 0.0555 | 0.0423 | 1.3958 |
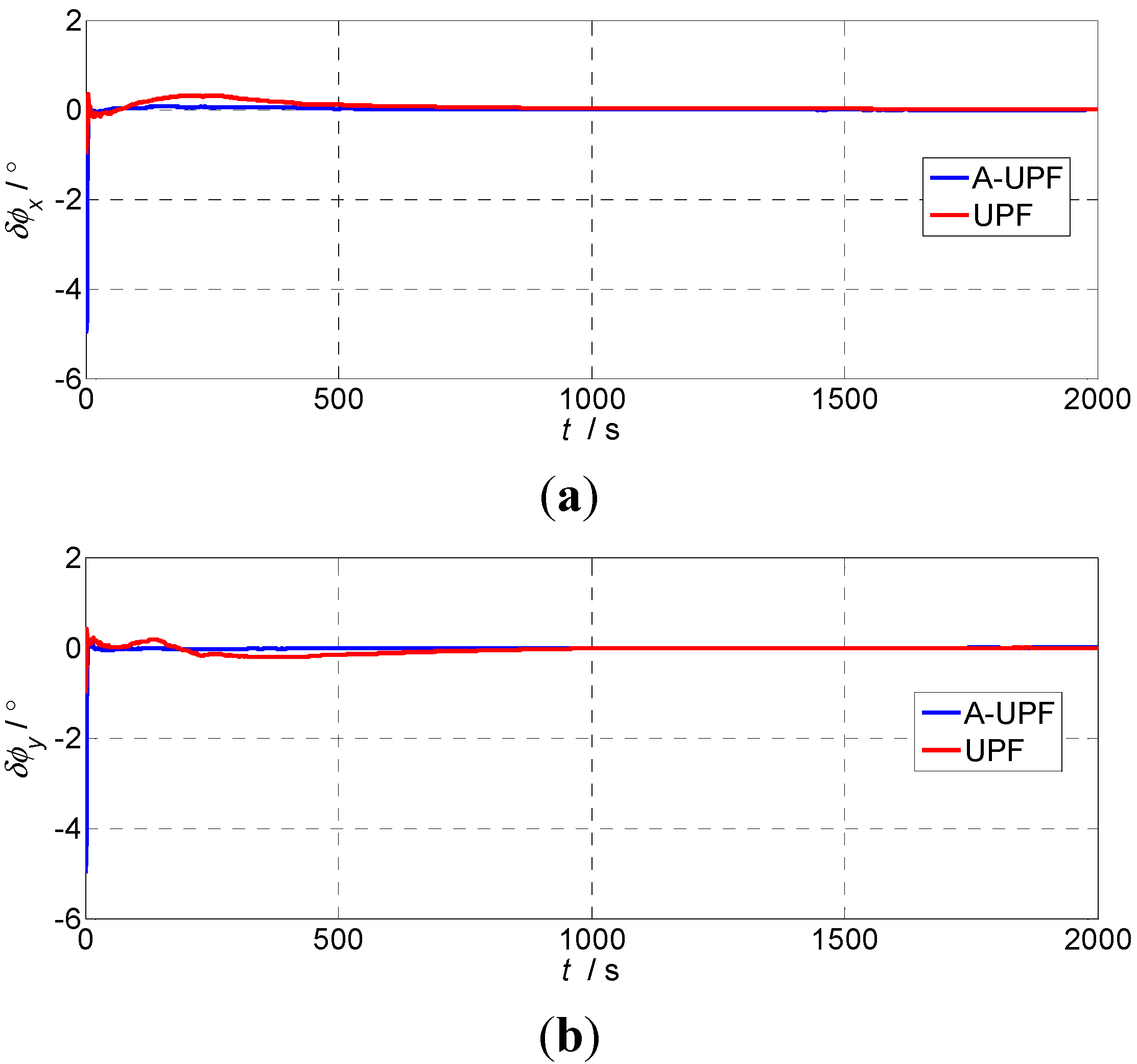
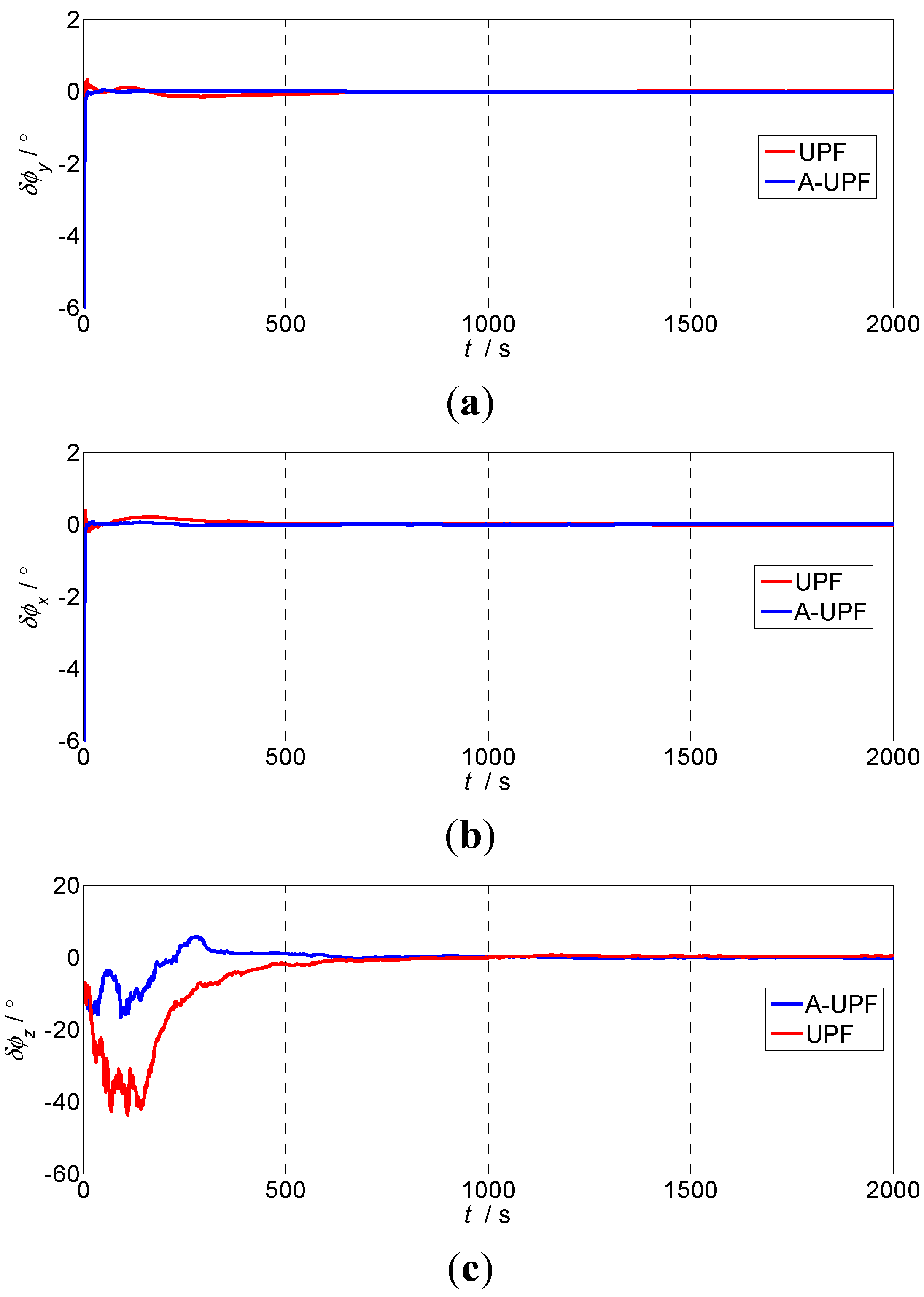
5.2.2. The Second Experiment
| Mean/° | Variance/° | |||||
|---|---|---|---|---|---|---|
| Pitch Error | Roll Error | Head Error | Pitch Error | Roll Error | Head Error | |
| UPF | 0.0454 | 0.0278 | 2.8174 | 0.0648 | 0.0634 | 4.9038 |
| Adaptive UPF | 0.0105 | 0.0122 | −0.7304 | 0.0629 | 0.0425 | 2.2557 |
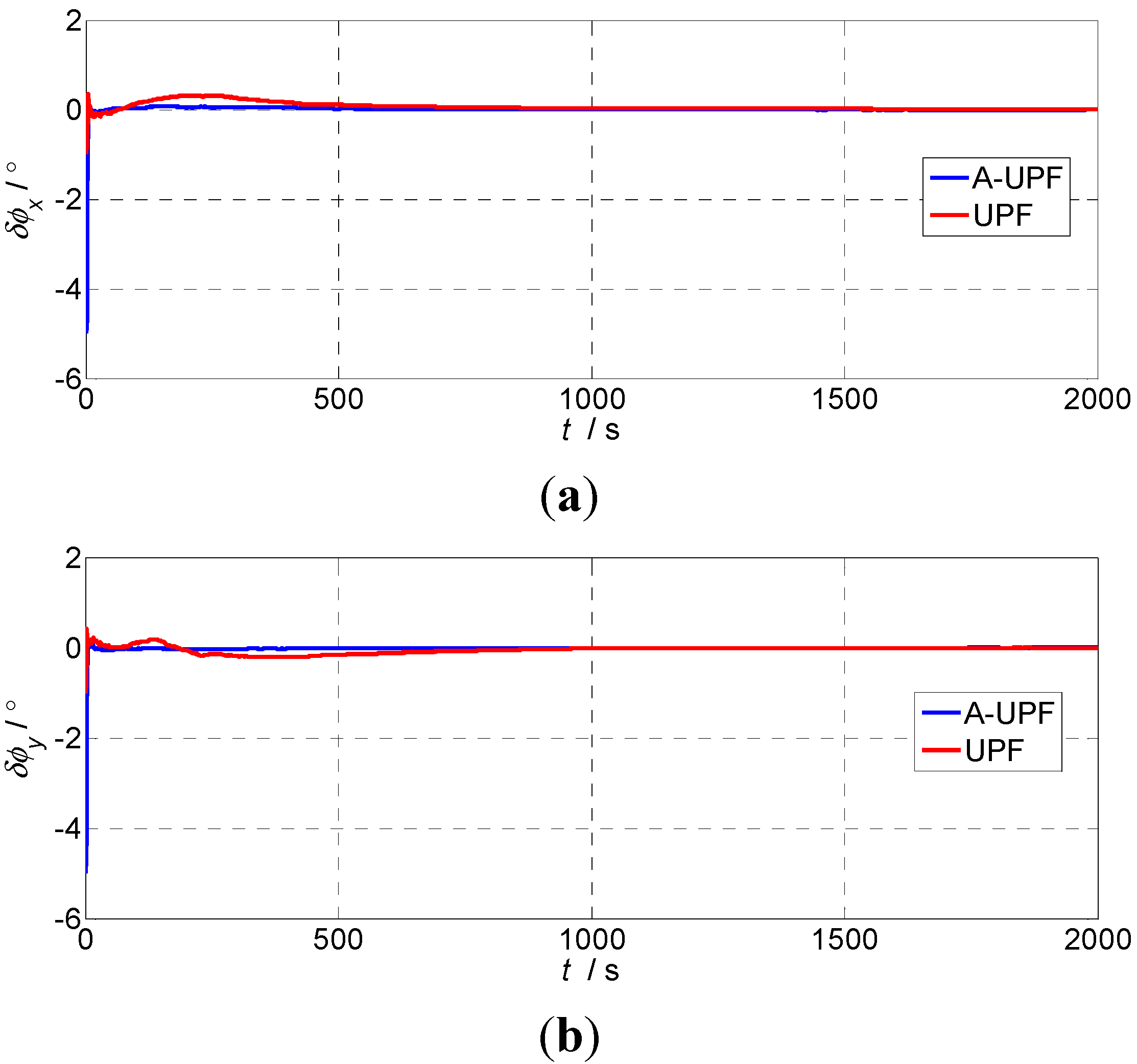
5.2.3. The Third Experiment
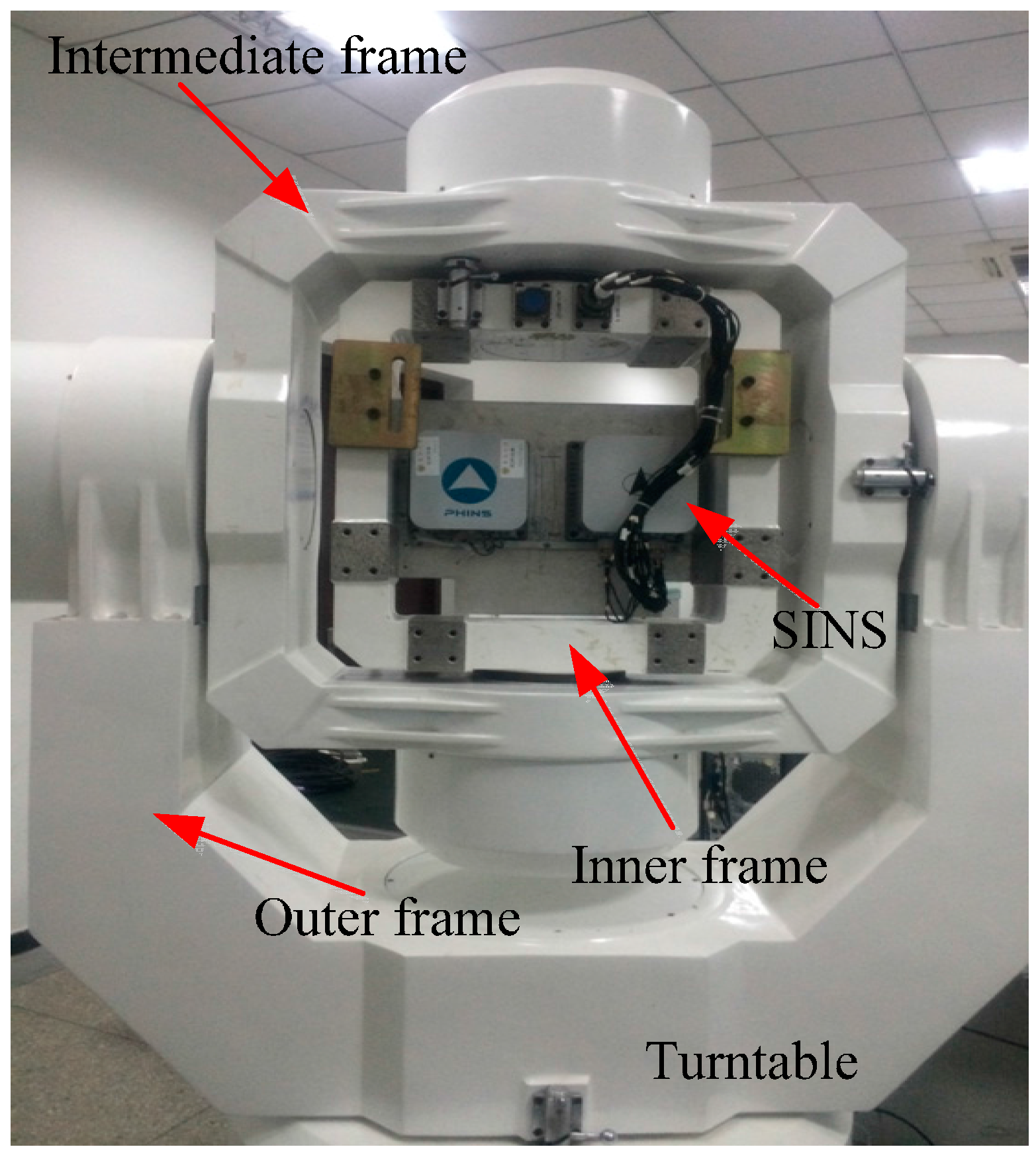
6. Turntable Experiment
6.1. Experiment Setup
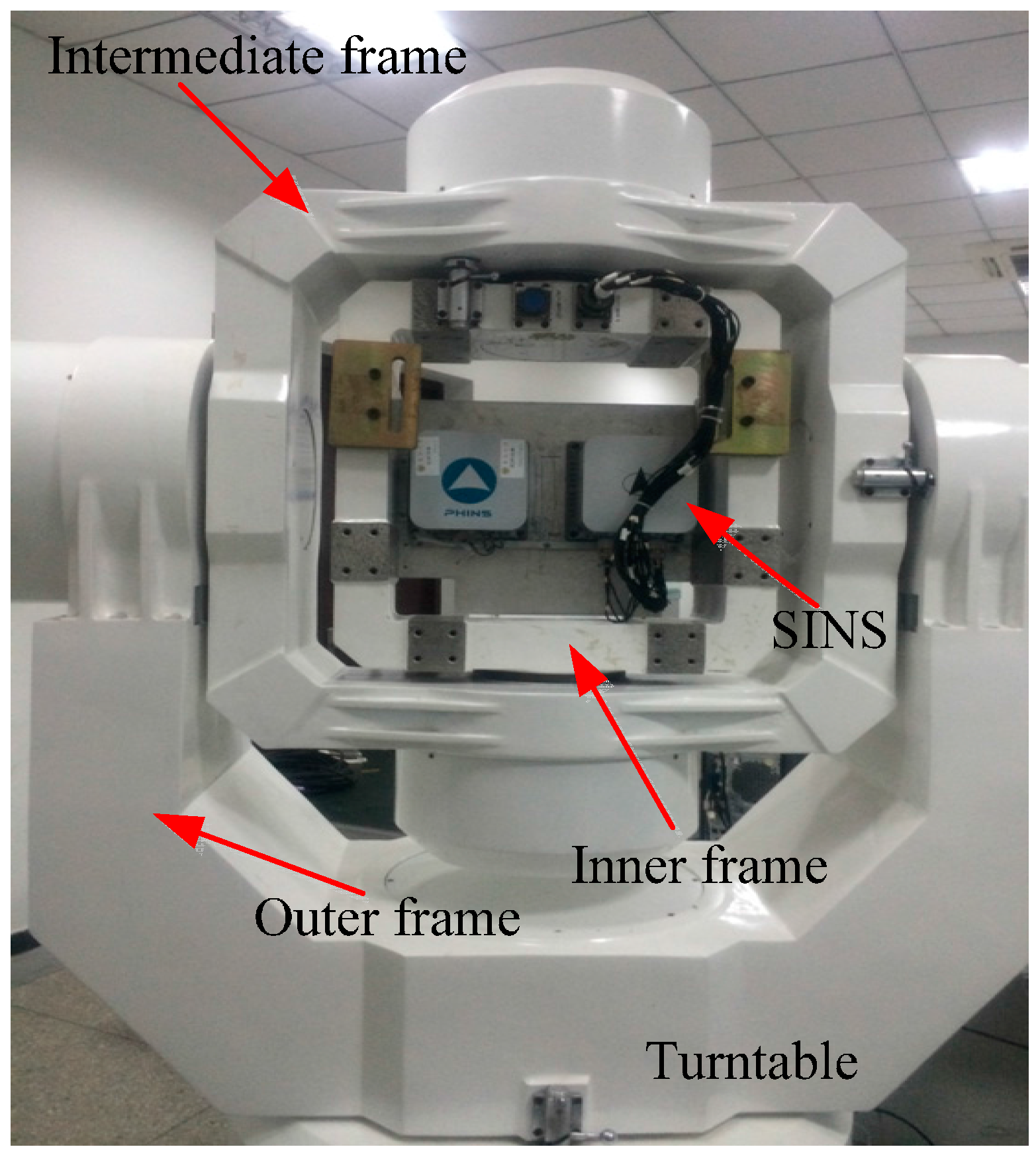
6.1.1. Turntable and SINS
| Gyro | Accelerometer | ||
|---|---|---|---|
| Constant errors | 0.006°/h | Constant errors | 50 µg |
| Random errors | 0.006°/ | Random errors | 50 µg |
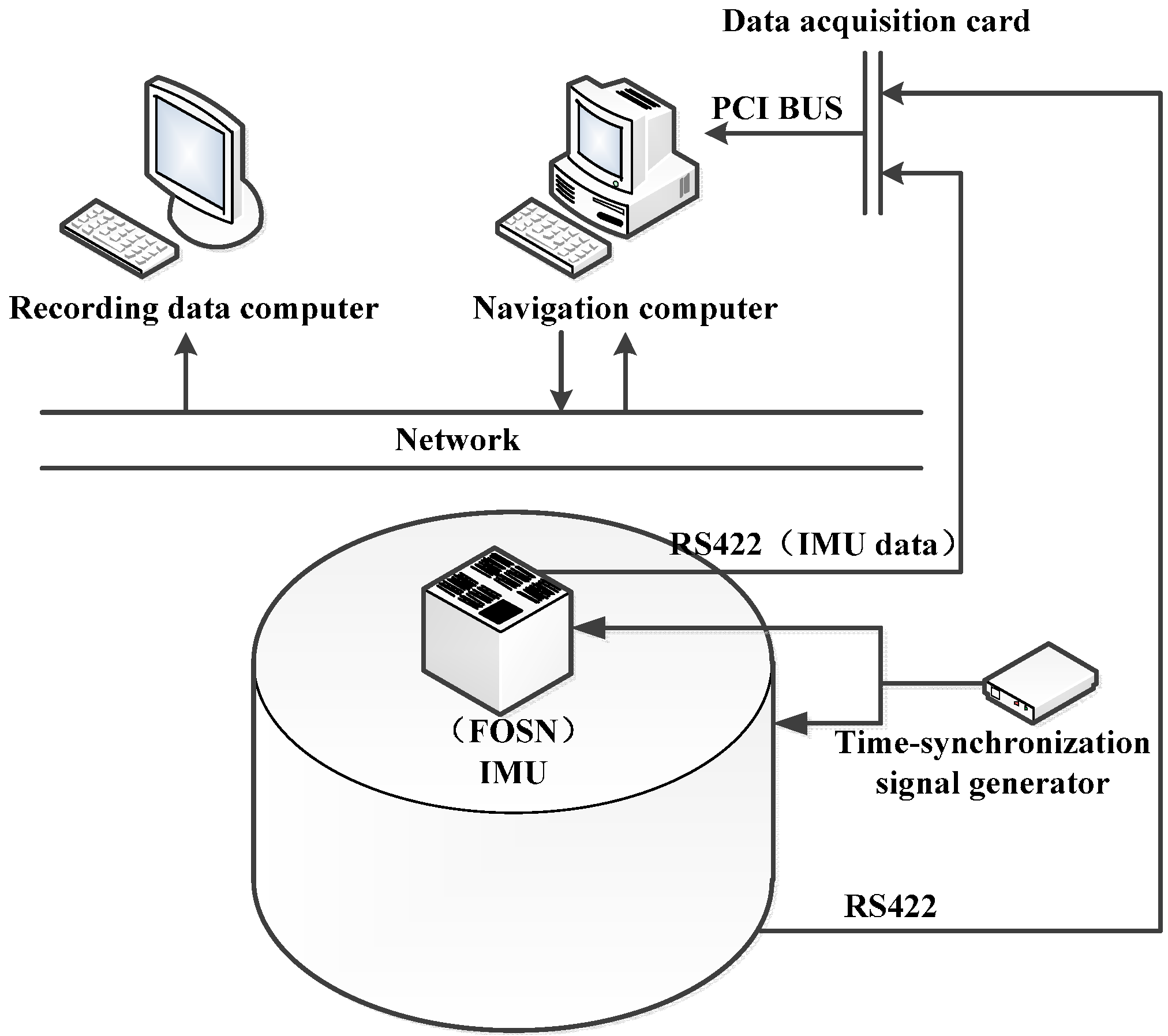
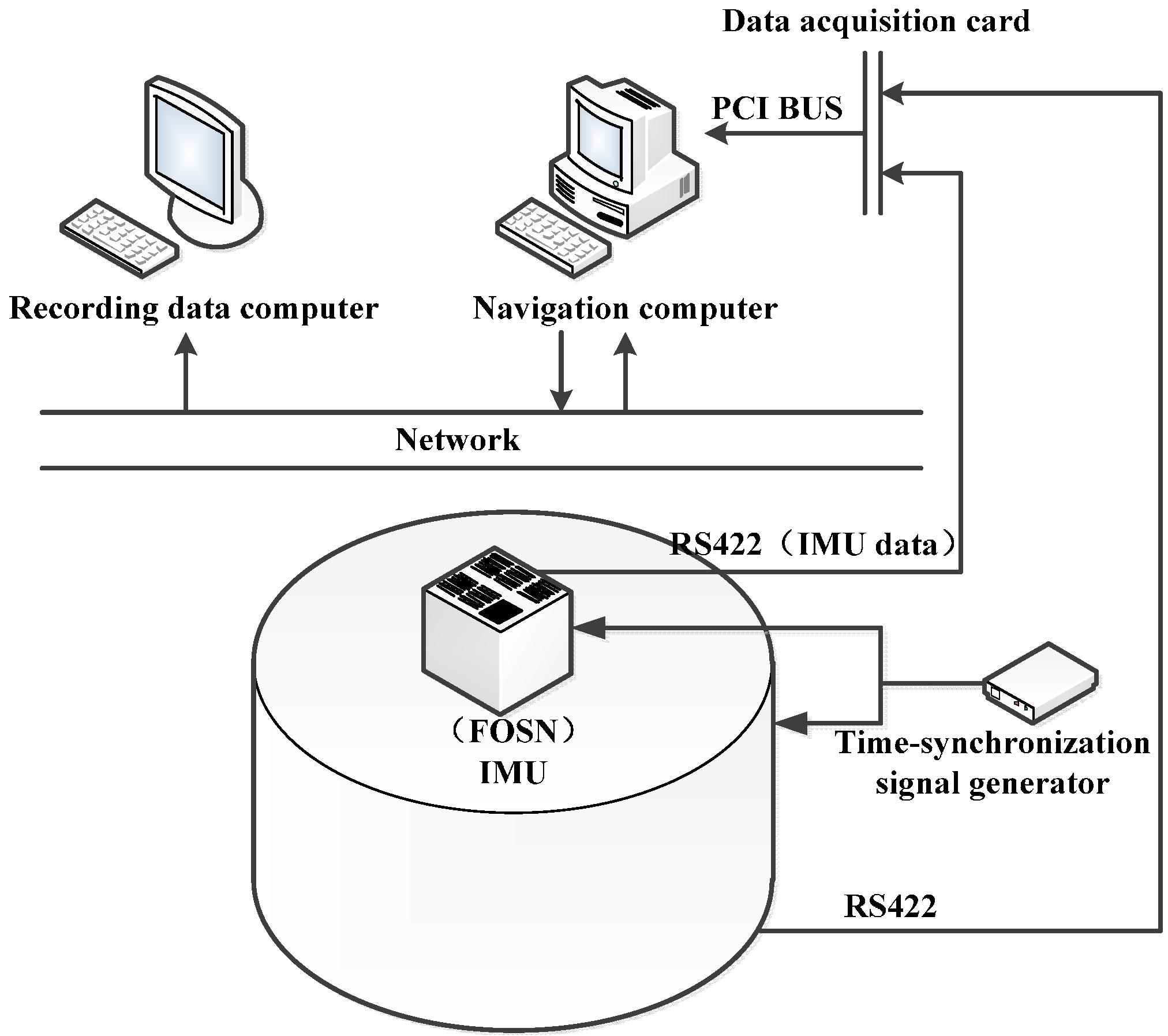
6.1.2. Construction of the Experimental Environment
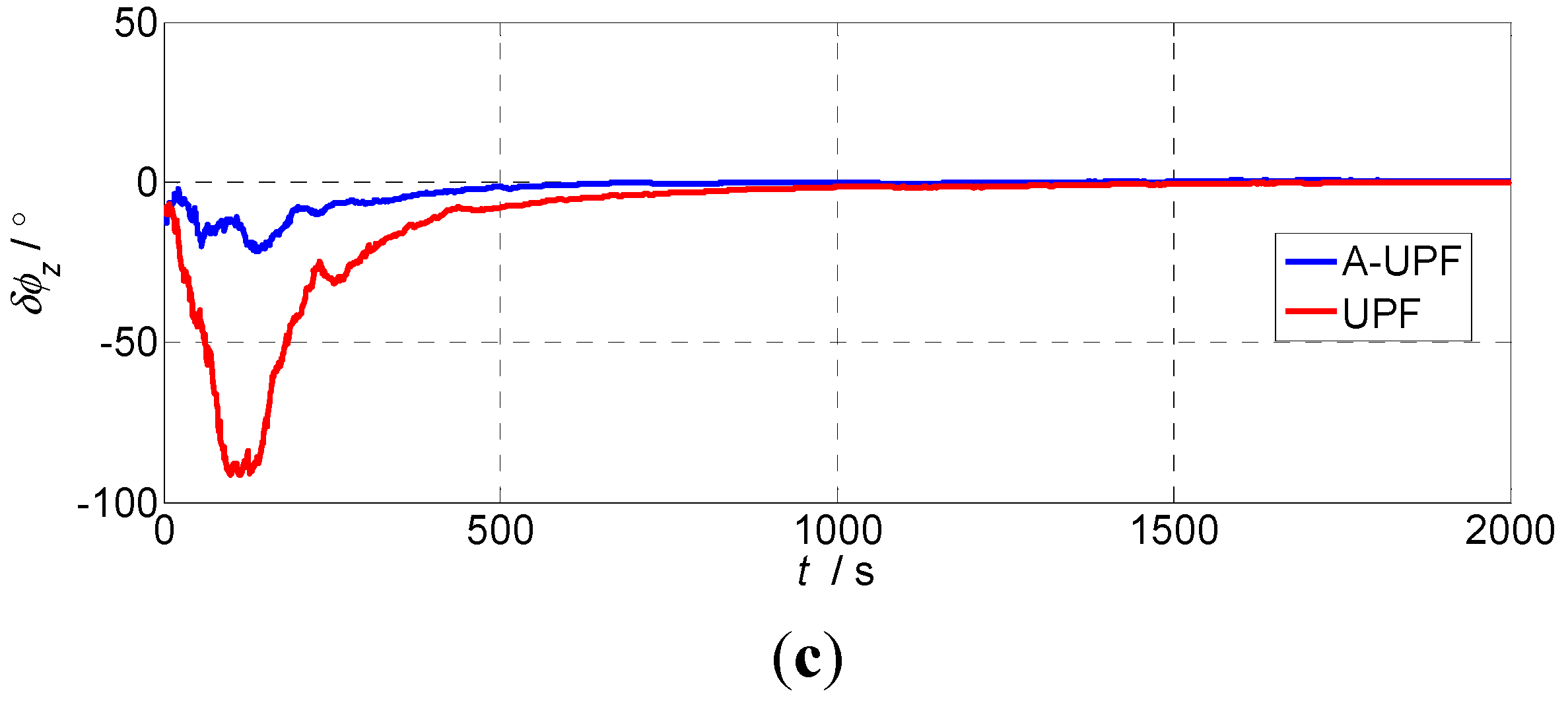
6.2. Experimental Results and Analysis
7. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Sun, F.; Tang, L.J. Initial alignment of large azimuth misalignment angle in SINS based on CKF. Chin. J. Sci. Instrum. 2012, 33, 327–333. [Google Scholar]
- Nie, Q. Nonlinear Filtering and Its Application in Navigation System. Ph.D. Thesis, Harbin Engineering University, Harbin, China, 2008. [Google Scholar]
- Dmitriyev, S.P.; Stepanov, O.A.; Shepel, S.V. Nonlinear filtering methods application in INS alignment. IEEE Trans. Aerosp. Electron. Syst. 1997, 33, 260–272. [Google Scholar] [CrossRef]
- Kong, X.; Nebot, E.M.; Durrant-Whyte, H. Development of a nonlinear psi-angle model for large misalignment errors and its application in INS alignment and calibration. In Proceedings of IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 1999; pp. 1430–1435.
- Xia, J.; Qin, Y.; Zhao, C. Study on nonlinear alignment method for low precision INS. Chin. J. Sci. Instrum. 2009, 30, 1618–1622. [Google Scholar]
- Gong, Y.S. Researches on Particle Filtering Algorithms and Application in GPS/DR Integrated Navigation. Ph.D. Thesis, PLA Information Engineering University, Zhengzhou, China, 2010. [Google Scholar]
- Van Der Merwe, R.; Doucet, A.; De Freitas, N.; Wan, E. The unscented particle filter. Adv. Neural. Inf. Process. Syst. 2001, 13, 584–590. [Google Scholar]
- Chatzi, E.N.; Smyth, A.W. The unscented Kalman filter and particle filter methods for nonlinear structural system identification with non-collocated heterogeneous sensing. Struct. Control. Health Monit. 2009, 16, 99–123. [Google Scholar] [CrossRef]
- Zhao, M.; Zhang, S.; Zhu, G. The Application Research of Unscented Particle Filter Algorithm to GPS/DR. In Proceedings of 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; pp. 8717–8721.
- Yan, G.; Yan, W.; Xu, D.M. Application of simplified UKF in SINS initial alignment for large misalignment angles. J. Chin. Inertial. Technol. 2008, 16, 253–264. [Google Scholar]
- Hao, Y.L.; Mu, H.W.; Jia, H.M. Application of ICDKF in initial alignment of large azimuth misalignment in SINS. Syst. Eng. Electron. 2013, 35, 152–155. [Google Scholar]
- Hao, Y.L.; Mu, H.W. Application of ACDKF in initial alignment of large azimuth misalignment in SINS. J. Huazhong Univ. Sci. Tech. Nat. Sci. Ed. 2012, 12, 80–84. [Google Scholar]
- Ding, Y.B.; Wang, X.L.; Wang, Z. Study on unscented Kalman filter applied in initial alignment of large azimuth misalignment on static base of SINS. J. Astronautics 2006, 6, 1201–1204. [Google Scholar]
- Fu, M.Y.; Deng, Z.H.; Yan, L.P. The Theory and the Application of Kalman Filter in Inertial Navigation System; Beijing Science Press: Beijing, China, 2010; pp. 195–199. [Google Scholar]
- Li, Y.; Li, Z. Adaptive unscented particle filter algorithm under unknown noise. J. Jilin Univ. Eng. Technol. Ed. 2013, 4, 1139–1145. [Google Scholar]
- Qin, Y.Y. Inertial Navigation; Beijing Science Press: Beijing, China, 2006; pp. 231–255. [Google Scholar]
- Ning, X.; Fang, J. Spacecraft autonomous navigation using unscented particle filter-based celestial/Doppler information fusion. Meas. Sci. Technol. 2008, 19. [Google Scholar] [CrossRef]
- Xu, X.; Li, B. Adaptive Rao-Black wellized particle filter and its evaluation for tracking in surveillance. IEEE Trans. Image Process. 2007, 16, 838–849. [Google Scholar] [CrossRef] [PubMed]
- Liu, X.; Xu, X. System calibration techniques for inertial measurement units. J. Chin. Inert. Technol. 2009, 5, 568–571. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sun, J.; Xu, X.-S.; Liu, Y.-T.; Zhang, T.; Li, Y. Initial Alignment of Large Azimuth Misalignment Angles in SINS Based on Adaptive UPF. Sensors 2015, 15, 21807-21823. https://doi.org/10.3390/s150921807
Sun J, Xu X-S, Liu Y-T, Zhang T, Li Y. Initial Alignment of Large Azimuth Misalignment Angles in SINS Based on Adaptive UPF. Sensors. 2015; 15(9):21807-21823. https://doi.org/10.3390/s150921807
Chicago/Turabian StyleSun, Jin, Xiao-Su Xu, Yi-Ting Liu, Tao Zhang, and Yao Li. 2015. "Initial Alignment of Large Azimuth Misalignment Angles in SINS Based on Adaptive UPF" Sensors 15, no. 9: 21807-21823. https://doi.org/10.3390/s150921807
APA StyleSun, J., Xu, X.-S., Liu, Y.-T., Zhang, T., & Li, Y. (2015). Initial Alignment of Large Azimuth Misalignment Angles in SINS Based on Adaptive UPF. Sensors, 15(9), 21807-21823. https://doi.org/10.3390/s150921807