1. Introduction
Due to the explosion of information technology and engineering sciences, robots have been widely utilized in many manufacturing practices. An industry robot is defined as a self-controlled, reprogrammable, and multi-functional machine made of mechanical, microelectronic, and electrical components [
1,
2,
3]. Robots are capable of executing monotonous, complicated, and hazardous tasks with precision, and thus used by manufacturers in many applications, including assembly, material handling, spray painting, and packaging [
4,
5]. Proper evaluation of robots and selecting the most appropriate one for a particular production environment would be helpful for a company to improve product quality and build profitability. Because of the increasing complexity of robot systems and the growing number of options on the market with different capabilities, features, and specifications, selecting the most suited robotic system for a particular industrial application is not an easy task for production firms. Therefore, in recent years, the problem of robot selection has attracted extensive attention from researchers as well as practitioners [
6,
7,
8].
Normally, robot selection is accomplished by multiple decision makers from different technical expertise and working backgrounds. In practice, it is hard for decision makers to give their opinions about alternatives using numerical values. Instead, they often use linguistic terms to express the assessments for alternate robots versus different criteria and criteria weights. As a new cognition model, cloud model was suggested by Li et al. [
9] based on probability statistics and fuzzy sets for handle fuzziness, randomness, and uncertain concepts. The prominent feature of the cloud model is that it can perfectly deal with the uncertainty of qualitative notions and make the bidirectional conversion between qualitative concepts and quantitative information more easily [
10,
11,
12]. Recently, researchers have applied cloud model theory to address linguistic decision making problems in many areas. For example, Wu et al. [
11] proposed a modified multi-objective optimization by ratio analysis plus the full multiplicative form (MULTIMOORA) method based on cloud model theory for quality function deployment analysis. Wang et al. [
12] reported an extended QUALIFLEX (qualitative flexible multiple criteria) method with cloud model theory to assess the performance of suppliers under economic and environmental criteria. Liu and Wen [
13] proposed a cloud model-based robust algorithm for continuum topology optimization considering uncertainties in load locations. Wu et al. [
14] designed an applicable method using cloud model with 2-order additive fuzzy measures for the selection of waste-to-energy disposal sites in China. Wang et al. [
15] suggested a consensus-based method based on cloud model for the large group decision making with linguistic information. In addition, Liu et al. [
16] used a grey relational analysis method and cloud model to evaluate failure modes with incomplete weight information of risk factors. Chang and Wang [
17] employed cloud model and decision tree to assess teacher evaluation in higher education including subjectivity, inaccuracy, and fuzziness.
On the other hand, various factors, such as positioning accuracy, cost, programming flexibility, load capacity, man-machine interface, and vendor’s service quality, need to be considered in the robot selection decision making [
7,
18,
19]. Therefore, robot selection is basically a multiple criteria decision making (MCDM) problem [
3,
8], and organizations can find utility in MCDM methods that can assist with evaluating and selecting robots in view of different conflict criteria. The TODIM (an acronym in Portuguese of interactive and multiple criteria decision making) [
20] is an MCDM method on the basis of prospect theory, which uses prospect formula to determine the supremacy of one alternative against another and considers experts’ bounded rationality in the decision making processes. Due to its advantages, the TODIM method has been applied by many researchers in different decision making solutions. For instance, Zhang and Xu [
21] suggested a hesitant vague TODIM approach for the evaluation of sustainable water management efficiency. Wang et al. [
22] developed a likelihood-based TODIM method based on multi-hesitant fuzzy linguistic sets to select service providers in logistics outsourcing. Sang and Liu [
23] proposed an interval type-2 fuzzy set-based TODIM approach to address multiple criteria green supplier selection problems. Ji et al. [
24] reported a projection-based TODIM model to deal with personnel selection problems within the multi-valued neutrosophic environment. In [
25], an extended TODIM model was presented for the evaluation of mineral resources development efficiency with hesitant fuzzy linguistic information. In [
26], an intuitionistic linguistic TODIM method was proposed to deal with the interactive MCDM problems in which criteria weights are unknown. Besides, Hu et al. [
27] addressed the online diagnosis and medical treatment selection problems by using a TODIM-based three-way decision model, and Wang et al. [
28] managed the non-homogeneous information and experts’ psychological behavior in group emergency decision making by using a fuzzy TODIM method.
Against the above background, this article aims to develop a cloud model based-TODIM (cloud TODIM) approach to handle robot selecting problems within an uncertain linguistic context. The proposed decision making approach brings several contributions to robot evaluation and selection. First, various linguistic assessments of decision makers on alternative robots are described with the aid of cloud model theory. Second, a new type of the standard TODIM is developed for determining the best robot for a given industrial application problem. Third, a combination weighting method is utilized to indicate criteria weights, which considers both subjective and objective weights in the robot selection process. In addition, a real example is presented to display the feasibility and effectiveness of the proposed cloud TODIM method for selecting robots.
The rest of this article is arranged as below:
Section 2 briefly reviews current robot selection methods in the literature.
Section 3 presents the basic concepts and operations regarding cloud model theory. In
Section 4, we give a new robot evaluation and selection framework by combing cloud model theory with the TODIM method. In
Section 5, we exemplify the proposed cloud model-TODIM methodology by using a practical robot selection case and by comparing with some existing methods. Finally, the conclusions of this paper and future research suggestions are provided in
Section 6.
2. Literature Review
In the past decades, a wide variety of methods and tools have been proposed for supporting robot selection decision making in different industrial contexts. Generally, the approaches of robot assessment and selection can be categorized into four categories: MCDM methods, optimization models, computer aided methods, and other solutions (e.g., statistical and mathematical models) [
2,
29]. Due to the multi-criteria character of robot selection problems, the MCDM methods have been recognized as a promising tool which reduces the problem of human’s decision impact on the final result of selection process. Thus, in the following, we mainly review the MCDM-based models suggested in previous studies for supporting the robot selection process. For a comprehensive review of more robot selection methods, one can refer to [
29].
Xue et al. [
8] developed a linguistic MCDM model, which integrates hesitant linguistic term sets with an improved QUALIFLEX technique, for robot selection with partial criteria weight information. Sen et al. [
3] presented an extension of the preference ranking organization method for enrichment evaluation (PROMETHEE) for robot evaluation considering objective and subjective data simultaneously, and Sen et al. [
7] applied the PROMETHEE II method for addressing the robot selection problem subjected to a set of objective data. An extended VIKOR approach was developed by Keshavarz Ghorabaee [
6] for robot evaluation under the interval type-2 fuzzy environment, and Kavita [
30] suggested an improved VIKOR method for the evaluation of robots in the context of triangular intuitionistic vague sets. Gitinavard et al. [
4] presented an interval hesitant fuzzy COPRAS (COmplex Proportional ASsessment of alternatives) model and Vahdani et al. [
31] offered an interval-valued fuzzy COPRAS framework for the determination of the most appropriate robot under uncertainty. Durán and Aguilo [
32] developed a fuzzy analytic hierarchy process (AHP)-based decision support system for selecting machine tools, and Kumru and Kumru [
33] used a fuzzy analytic network process (ANP) model for the selection of 3D coordinate-measuring machines. Besides, a number of other models have been suggested to help experts in their robot selection decisions, such as the generalized interval-valued fuzzy TOPSIS [
34], the fuzzy hierarchical TOPSIS [
5], the weighted aggregated sum product assessment (WASPAS) [
35,
36], and the ELECTRE (Elimination and Choice Expressing the Reality) method [
37].
In Koulouriotis and Ketipi [
38], a fuzzy digraph methodology was proposed for the comparison and selection of industrial robots, in which the fuzzy logic was used for managing experts’ assessments and the digraph and matrix technique was adopted for ranking robots. Gola and Świć [
39] proposed a computer aided machine tool selection tool for focused flexibility manufacturing systems considering several economical criteria. Rao et al. [
1] proposed a MCDM technique to evaluate and rank robots in an industry application, which utilizes statistical variance and AHP method to compute the objective and subjective weights of criteria, respectively. Kentli and Kar [
40] presented a multi-criteria robot selection algorithm on the basis of satisfaction function and distance measure, and Kumar and Garg [
41] gave a determining quantitative framework using the distance method to choose the optimal robot. In addition, multiple MCDM methods have been used for industrial robot selection. For instance, Parameshwaran et al. [
19] proposed a united approach for the assessment of robots from objective and subjective standards, in which fuzzy AHP was utilized to indicate criteria weights and fuzzy TOPSIS and fuzzy VIKOR were employed to determine rank orders of alternatives. Chatterjee et al. [
2] utilized the VIKOR and ELECTRE methods for the selection of industrial robots, and Bairagi et al. [
42] presented a de novo multi-approaches multi-criteria decision making method called Technique of Precise Order Preference (TPOP) for the performance evaluation of material handling devices.
The literature review above shows that a lot of MCDM methods have been applied for robot selection decision making. However, the psychological behavior of experts has not been taken into consideration in the existing models of robot selection, which is of considerable significance since different experts may have different psychological expectations in the practical situation. On the other hand, although many uncertainty theories, such as fuzzy sets, intuitionistic vague sets and 2-tuple linguistic variables, have been utilized by researchers for coping with imprecise and fuzzy decision makers’ preferences, they cannot describe the fuzziness and randomness of qualitative characteristics of criteria simultaneously. Therefore, to bridge theses gaps, this paper attempts to developed a novel behavioral decision making model to address the problem of robot evaluation and selection with hesitant linguistic information. Furthermore, both subjective and objective criteria weights are taken into account in determining the ranking orders of alternative robots. Finally, we apply the proposed cloud TODIM approach to the robot selection case in an auto company to demonstrate its validity and applicability.
4. The Proposed Robot Selection Approach
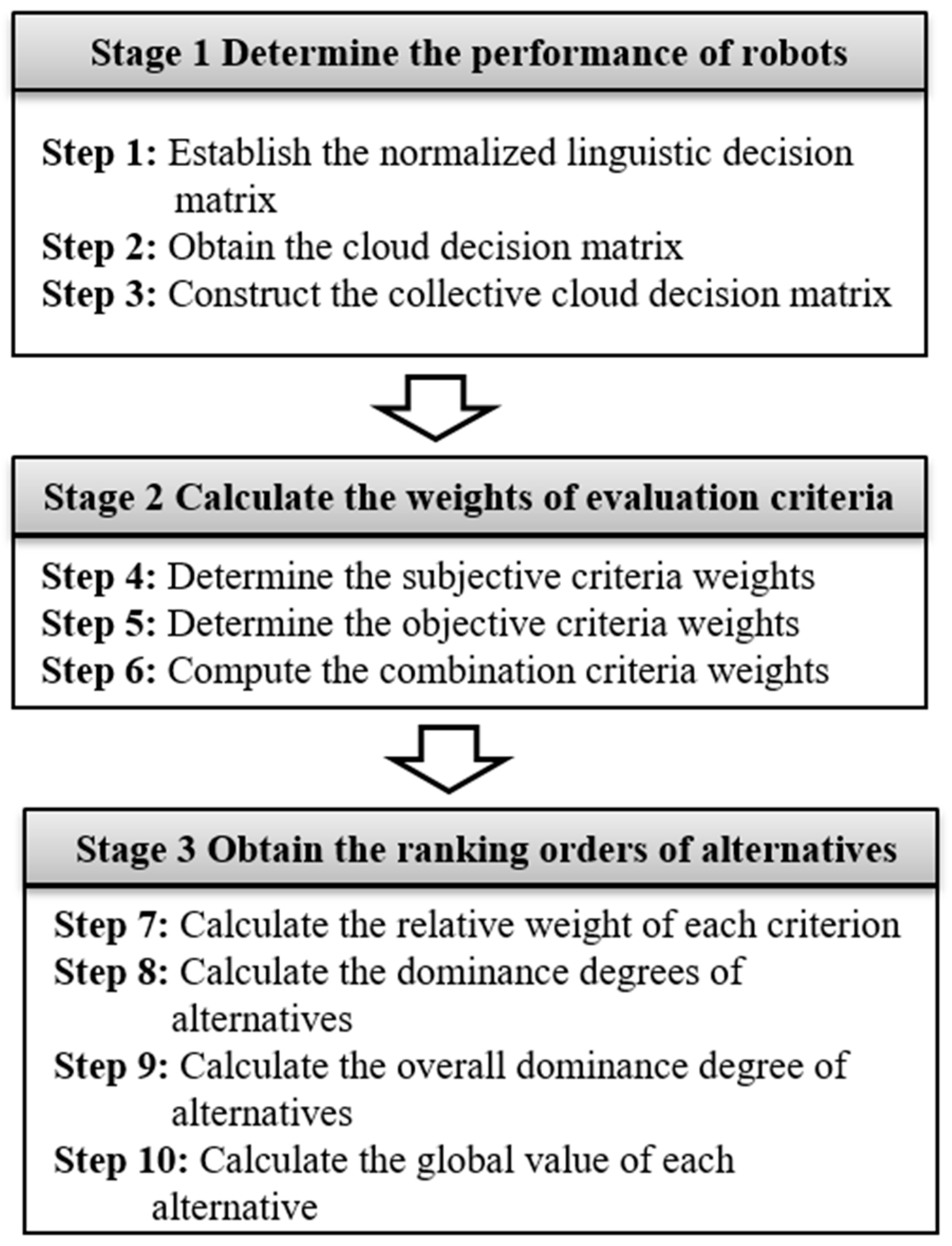
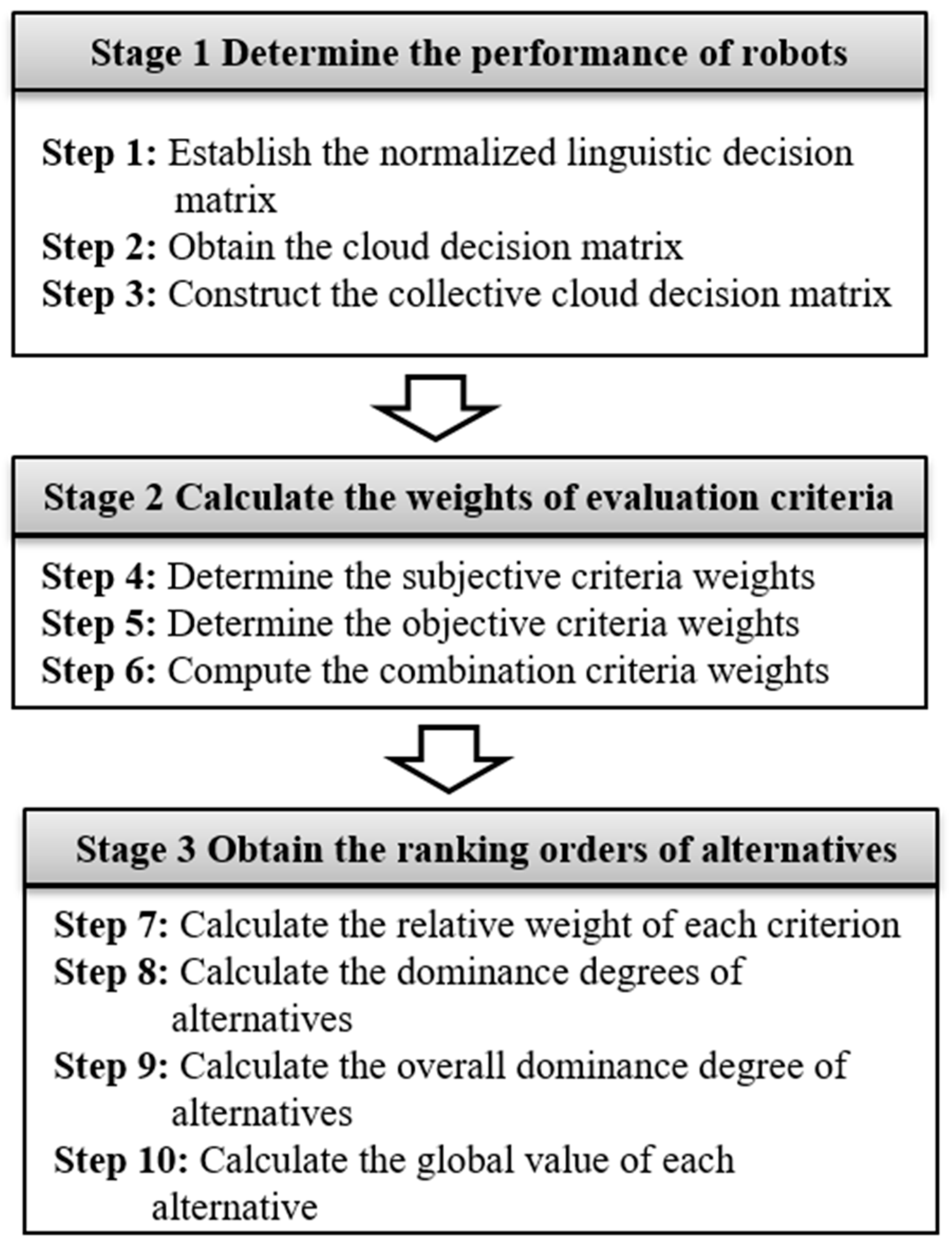
This section develops a novel decision supporting method by combining cloud model with a modified TODIM to cope with the robot evaluation and selection problems considering subjective and objective criteria weights. In a nutshell, the new model comprises three key phases of determining the ratings for available robots, estimating the weights regarding evaluation criteria, and determining the ranking for alternative robots. First, the linguistic ratings of decision makers on alternatives are handled with the cloud model theory. Second, the importance weights of selection criteria are acquired by using a combination weighting method. Finally, the ranking orders of alternatives are determined adopting the procedure of a modified TODIM method. The overall process for using the proposed three-stage cloud TODIM model is shown in
Figure 1, and the corresponding procedural steps are explained in the following subsections.
4.1. Determine Robot Assessments
Let us consider a robot selection problem with m possible alternatives and n selection criteria , in which a collection of l experts or decision makers is involved. Let be the linguistic decision matrix specified by DMk, where denotes the judgement of alternative Ai against Cj assigned by . Because decision makers from different working backgrounds have dissimilar experience and knowledge, they are given different weights with ) in the robot selection process. Next, the cloud model is implemented to address the decision makers’ linguistic assessments of robots against each criterion.
Step 1: Establish the normalized linguistic decision matrix
In the real robot selection problem, different types of criteria often exist, such as cost and benefit. Therefore, we normalize the linguistic decision matrix
first to obtain the corresponding matrix
, which can be yielded by
Note that if
is an LHFS
, then
.
Step 2: Obtain the cloud decision matrix
According to the introduced cloud conversion method in
Section 3.2, this step is to convert the linguistic assessments of each normalized linguistic decision matrix
into the corresponding normal clouds for determining the cloud decision matrix
, where
and
Step 3: Construct the collective cloud decision matrix
Once the decision makers’ cloud assessments are obtained, we can pull all individual cloud decision matrices
for the collective cloud decision matrix
. By using the CHA operator, the aggregated cloud rating of alternative
Ai on criterion C
j, i.e.,
, is calculated by
where
is the
hth largest element of the weighted normal clouds
and
is a related COWA weight vector with
and
.
It is worth noting that if quantitative criteria existed in the problem of robot selection, the assessments of each alternative can be normalized, e.g., by using the linear normalization method [
18], and converted into normal clouds. Thus, both qualitative and quantitative criteria can be handled in the course of robot evaluation and selection.
4.2. Determine Criteria Weights
Different types of weighting methods have been used to define the importance values of criteria for multi-criteria decision analysis, which can be categorized as subjective, objective, and combination weighting methods. The subjective weighting techniques, such as AHP [
19], step-wise weight assessment ratio analysis (SWARA) [
49,
50], pivot pairwise relative criteria importance assessment (PIPRECIA) [
51], factor relationship (FARE) [
52], and best-worse method [
53], assign the criteria weights using the subjective preferences or judgments of decision makers. In contrast, the objective weighting techniques, like entropy method [
54], criterion impact loss (CILOS) [
55], and integrated determination of objective criteria weights (IDOCRIW) [
56,
57], specify the criteria weights through dispersion analyses of data given in a decision matrix. Nevertheless, both the subjective and objective weighting techniques have their own advantages and drawbacks. Accordingly, the combination weighting methods integrating both subjective and objective weights have been increasingly adopted by researchers for deriving the weights of criteria.
In the sequel, an entropy-based combination weighting method is proposed to determine criteria weights for the robot selection problem.
Step 4: Determine the subjective criteria weights
Let
be the linguistic weighting of criterion C
j given by decision maker DM
k to indicate its importance in the ranking of robots. The corresponding cloud weights
are aggregated to find the collective cloud weights
by using the CHA operator. Then, the subjective weight of each evaluation criterion is computed by
where
is the estimated value of the cloud weight
.
Step 5: Compute the objective criteria weights
On the basis of the entropy theory [
54], the objective weights of criteria are defined as
where
Ej is the entropy of the projected results of the criterion C
j, which can be obtained by
Step 6: Compute the combination criteria weights
Based on the obtained subjective and objective weights, the combination weights of the criteria are computed by Equation (12) i.e.,
4.3. Define the Ranking of Robots
The TODIM is an interactive MCDM method based on prospect theory [
20,
58], which reflects decision makers’ psychological behavior in the decision making process. It is a practical and consistent method to better make decisions and has been implemented successfully in many situations [
22,
25,
27]. This subsection extends the TODIM method to cloud environment to help decision makers to rank alternative robots for the given robot selection problem.
Step 7: Compute the relative weight of C
j with respect to the reference criterion C
r by
where
and C
r is the criterion associated with
wr.
Step 8: Determine the domination degree of
Ai over
Ap under C
j, i.e.,
where
θ is the attenuation factor of the losses and
is the distance between the cloud ratings
and
.
Step 9: Obtain the overall domination degree of
Ai over
Ap by
Step 10: Acquire the global value of alternative
Ai over the other alternatives by using the following equation:
where
. All the alternatives are ranked following the descending order of their global values
, and the best robot can be derived for the considered industrial application.
6. Conclusions
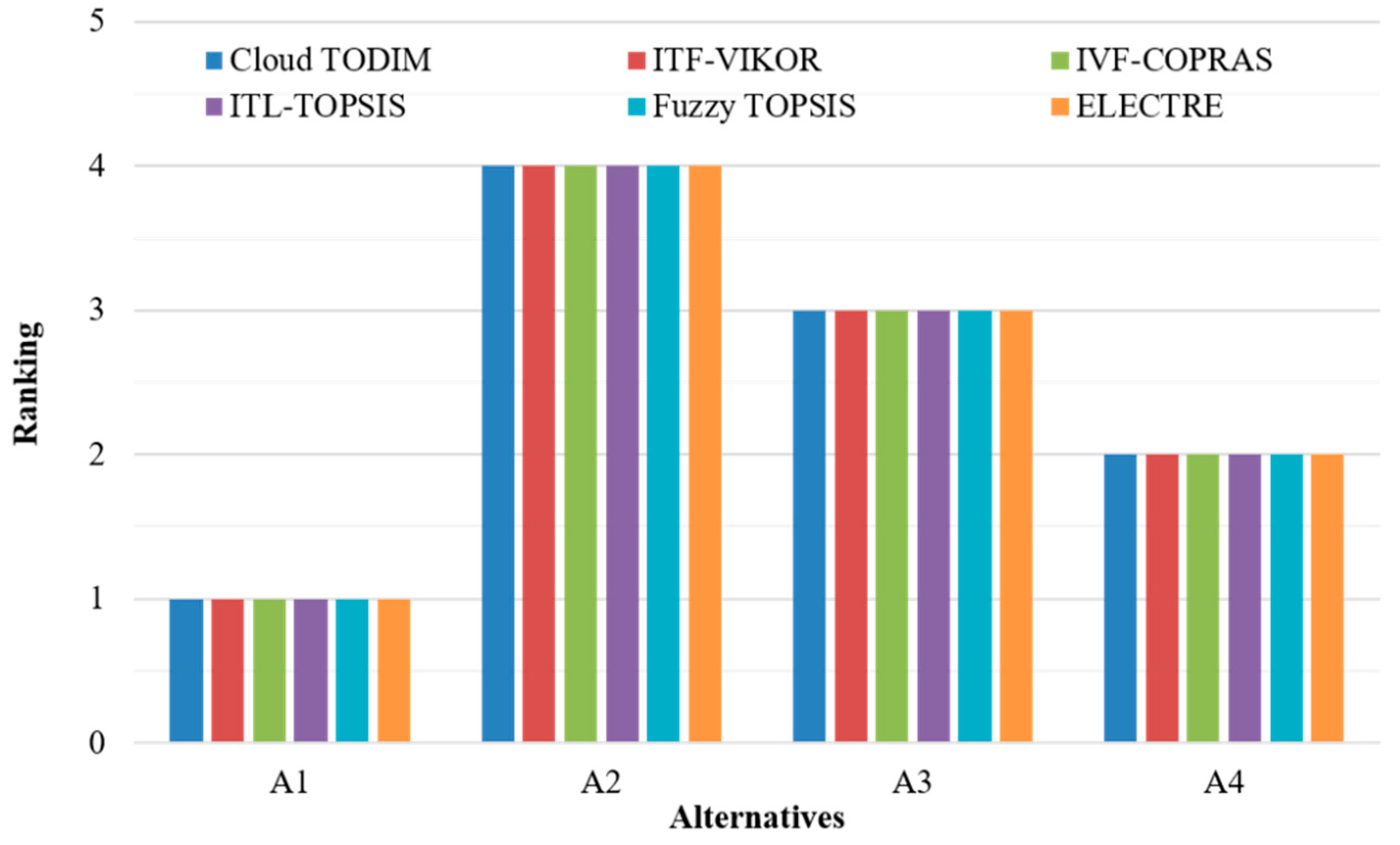
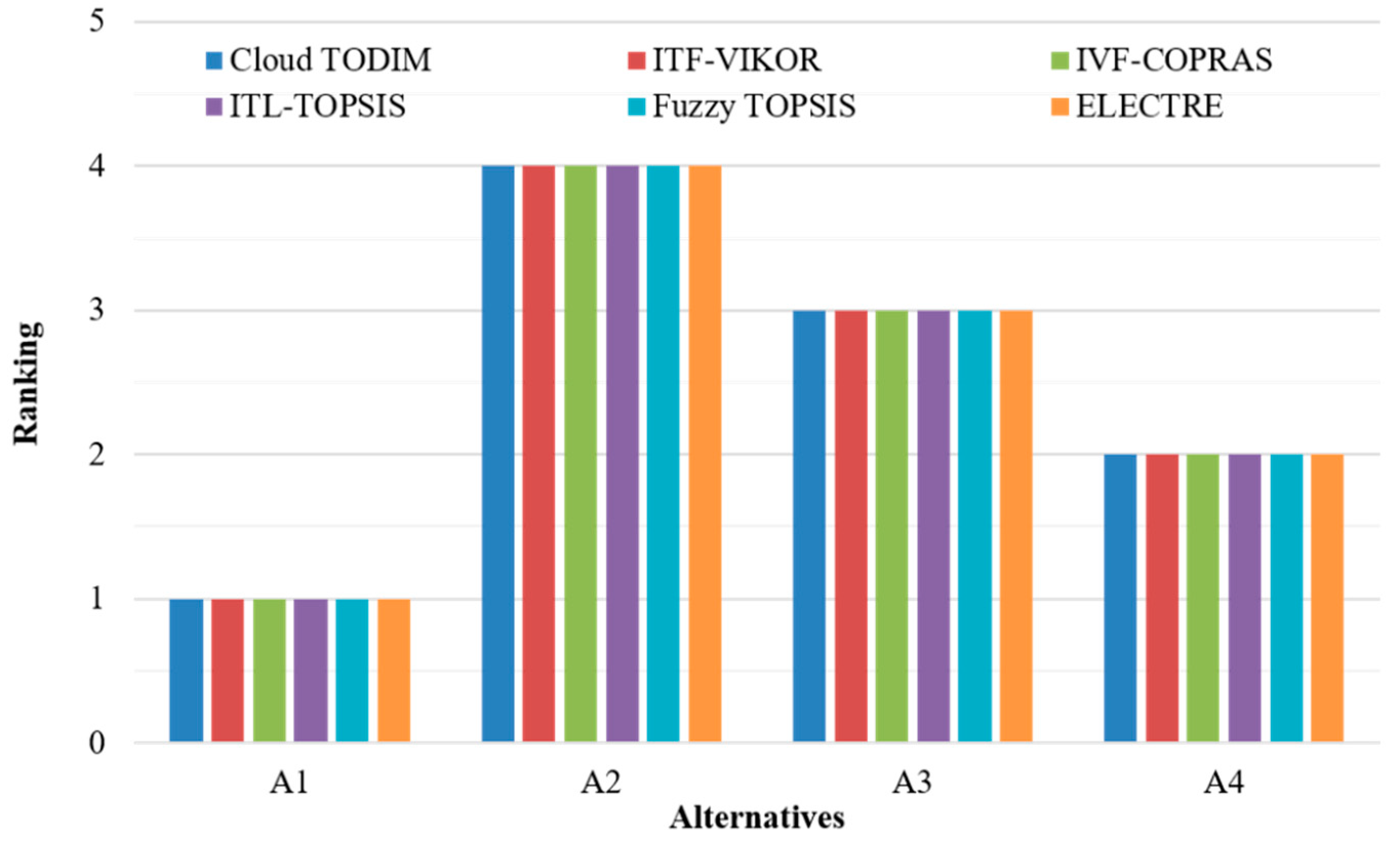
Industrial robots are commonly applied in different advanced manufacturing systems to enhance efficiency and improve product quality. Choosing the ideal robot for a particular problem has nowadays become a major concern for manufacturing companies. This work developed an integrated MCDM approach combing the cloud model and TODIM method for the selection of the optimal industrial robot. We used an illustrative example for indicating the applicability and suitability of our proposed model. To validate the results, the ranking results derived with the cloud TODIM approach were compared with some existing robot selection methods. The results display that the proposed model is more powerful in dealing with the uncertainty and imprecision of subjective assessments given by decision makers. It can generate a rational ranking result for the given robots in a real-life robot selection problem and accommodate situations in which decision makers show bounded rationality. In addition, the proposed robot section model sufficiently considers the different importance of evaluation criteria, which makes the ranking orders more consistent with the actual situation.
For future research, the following directions are recommended. First, the interrelationships among criteria were ignored in this study. To overcome this deficiency, the proposed approach can be improved by using the fuzzy cognitive map or decision-making trial and evaluation laboratory (DEMATEL) method. Second, many computations are involved in the proposed approach and it requires additional expertise for practitioners in the adopted methods and cloud model theory. Hence, our future research will develop a specialized software tool for the proposed robot selection approach so that it can be easily implemented by non-experts. In addition, the proposed cloud TODIM framework for evaluating and selecting robots is a general method, which is able to be applied to other manufacturing problems for making a suitable decision, including rapid prototyping process selection, flexible manufacturing system selection, and advanced manufacturing technology selection.



{kind=link}
{kind=link}