Let (
X, Σ,
μ) be a Lebesgue space, and let
g : [0, 1] ↦ ℝ be a concave function with
(We might assume only that
g(0) = 0, but then, the idea of the dynamical
g-entropy would fail, since if
n+1 ≠
n for every
n and
, then the dynamical
g-entropy of the partition
would be infinite. Therefore, if
g is not well-defined at zero, we will assume that
.). By
0, we will denote the set of all such functions. Every
g ∈
0 is subadditive,
i.e.,
g(
x +
y) ≤
g(
x)+
g(
y) for every
x,
y,
x +
y ∈ [0, 1], and quasi-homogenic,
i.e.,
φg :(0, 1] → ℝ defined by
φg(
x):=
g(
x)
/x is decreasing (see [
31]). If
g is fixed, we will omit the index, writing just
φ.
2.1.1. Dynamical g-Entropies
For an automorphism
T :
X ↦
X and a partition
= {
E1, ...,
Ek}, we put:
and
Now, for a given
g ∈
0 and a finite partition
, we can define the dynamical
g-entropy of the transformation
T with respect to
as:
Alternatively we will call it the
g-entropy of the process (
X, Σ,
μ,
T,
). If the dynamical system (
X, Σ,
T,
μ) is fixed, then we omit
T, writing just
h(
g, ). As in the case of Shannon dynamical entropies, we are interested in the existence of the limit of
. If
g =
η, we obtain the Shannon dynamical entropy
h(
T, ). However, in the general case, we cannot replace an upper limit in
Equation (2) by the limit, since it might not exist. The existence of the limit in the case of the Shannon function follows from the subadditivity of static Shannon entropy. This property has every subderivative function,
i.e., a function for which the inequality
g(
xy) ≤
xg(
y) +
yg(
x) holds for any
x,
y ∈ [0, 1], but this is not true in general (an appropriate example will be given in Section 2.1.3). Therefore, we propose more general classes of functions for which this limit exists:
It is easy to show that if g is subderivative, then the limit
is finite. Moreover, we will see that values of dynamical g-entropies depend on the behavior of g in the neighborhood of zero. We will prove that if
, then there is a linear dependence between the dynamical g-entropy and the Shannon dynamical entropy of a given partition. Before we give the general result (Theorem 1), we will state a few facts, which we will use in the proof of this theorem. We give the following lemmas, omitting their elementary proofs.
Lemma 1. Let bi > 0,
ai ∈ ℝ
for i = 1,...,
m,
then Lemma 2. If ∈ 𝔅,
δ > 0
and g :[0, 1] ↦ ℝ,
then:
The following lemma states that the value of the dynamical g-entropy is given by the behavior of g in the neighborhood of zero.
Lemma 3. If g1,g2 ∈0 and there exists c > 0, such that g1(x) = g2(x) for x ∈ [0, c], then for every ∈ 𝔅 h(g1, ) = h(g2, ).
Proof. Let
∈ 𝔅 and
g1,
g2 ∈
0,
c > 0, fulfill the assumptions. Because
g ∈
0 is bounded, we have:
Dividing by
n and converging to infinity, we obtain:
We may state now the main theorem of this section.
Theorem 1. Let ∈ 𝔅.
- (1)
If g ∈ 0 is such that g′(0) < ∞, then h(g, ) = 0.
- (2)
If g1,
g2 ∈
0 are such that g′
1(0) = g′
2(0) = ∞,
and h(
g2,
) < ∞,
then:
If,
additionally,
,
then:
- (3)
If h(g2, ) = ∞ and, then h(g1, ) = ∞.
Remark 1. Whenever g2 :[0, 1] ↦ ℝ is a nonnegative concave function satisfying g2(0) = 0 and g′2(0) = ∞, we can have any pair 0 < a ≤ b ≤ ∞ as a limit inferior and limit superior of g1/g2 in zero, choosing a suitable function g1. The idea is as follows: construct g1 piecewise linear. To do so, define inductively a strictly decreasing sequence xk → 0 and a decreasing sequence of values yk = g1(xk) → 0, thus defining intervals Jk : = [xk+1, xk], where g is affine. The only constraint to get a concave function is that the slope of g on each interval Jk has to be smaller than yk/xk and increasing with respect to k; this is not an obstruction to approach any limit inferior and limit superior for g1(x)/g2(x), provided that xk+1 > 0 is chosen small enough.
Proof of Theorem 1. Let
∈ 𝔅. Suppose that
g ∈
0 and
g′(0) < ∞. Then:
which completes the proof of Point 1. To show Point 2, let
g1,
g2 ∈
0 be such that
g′
1(0) =
g′
2(0) = ∞ and
h(
g2,
) < ∞. W.l.o.g, we can assume that
g1(
x),
g2(
x) > 0 for
x ∈ (0, 1), since if there exists
x0 ∈ (0, 1), such that
gi(
x0) = 0 for
i = 1 or
i = 2, then we can define
g̃i :[0, 1] ↦ ℝ as:
where
si ∈ (0, 1] is such that
. Then,
g̃ is strictly positive, and by Lemma 3 we have:
Since
g is subadditive, the sequence
is nondecreasing, and there exists the limit of
H(
g2,
n). If it is finite, then
h(
g2,
) = 0, and by
Equation (3) and Lemma 1, we have:
Because
, there exists
M > 0, such that
g1(
x)/
g2(
x) <
M for
x < 1
/2. Therefore,
, and by Lemma 1, we obtain:
Thus, we can assume that
.
Fix
ε > 0. There exists
δ > 0, such that, for
x ∈ (0,
δ], we have:
Using
Equation (3) for every
n > 0, we get:
where
for
i = 1, 2. Therefore:
and
. Dividing sums by
and from
Equation (4), we obtain:
Converging with
n to infinity, we obtain:
Therefore:
Thus, we obtain the assertion. In the case of the infinite upper limit of the quotient g1(x)/g2(x), we can repeat the above reasoning, just omitting the upper bound for the considered expressions.
If
and h(g2, ) = ∞, then
, and using similar arguments, we obtain Point 3.
Similar arguments lead us to the following statement:
Theorem 2. Let g1, g2 ∈0 be such that, and let a finite partition have positive g2-entropy. Then, h(g1, ) is infinite.
Theorems 1 and 2 imply a few corollaries:
Corollary 1. If there exists the limit, then
Let
. If g1 = g, g2 = η, then we have the following corollary:
Corollary 2. Let ∈ 𝔅
and g ∈
0,
then:- (1)
If Ci(g) < ∞, then h(g, ) ≥ Ci(g) · h().
- (2)
If Cs(g) < ∞, then h(g, ) ∈ (Ci(g) · h(), Cs(g) · h()).
- (3)
If, then h(g, )=C(g) · h().
- (4)
If and h() > 0, then h(g, ) = ∞.
Corollary 3. If (X, Σ, μ, T) has positive Kolmogorov-Sinai entropy and g ∈0 then: Cs(g) < ∞ ⇒ g-entropy of any process (X, Σ, μ, T, ) is finite ⇒ Ci(g) < ∞.
Corollary 4. If, then.
2.1.2. Case of
We will show that for every
, any aperiodic automorphism T and every γ ∈ ℝ, there exists a partition ∈ 𝔅 such that h(g, ) ≥ γ. Since we omit the assumption of ergodicity, we will use different techniques, mainly based on the well-known Rokhlin Lemma, which guarantees the existence of so-called Rokhlin towers of a given height, covering a sufficiently large part of X. Using such towers, we will find lower bounds for the g-entropy of a process.
We will assume that we have an aperiodic system, i.e., (
X, Σ,
μ,
T) for which
If
M0,...,
Mn−1 ⊂
X are pairwise disjoint sets of equal measure, then
τ = (
M0,
M1,...,
Mn−1) is called a tower. If additionally
Mk =
T−(n−k−1) Mn−1 for
k = 1,...,
n – 1, then
τ is called a Rokhlin tower (It is also known as a Rokhlin–Halmos or Rokhlin–Kakutani tower.). By the same bold letter
τ, we will denote the set
. Obviously
μ(
τ) =
nμ(
Mn−1). Integer
n is called the height of tower
τ. Moreover, for
i <
j, we define a sub-tower:
In aperiodic systems, there exist Rokhlin towers of a given length that cover a sufficiently large part of X:
Lemma 4 ([
32]).
If T is an aperiodic and surjective transformation of Lebesgue space (
X, Σ,
μ),
then for every ε > 0
and every integer n ≥ 2,
there exists a Rokhlin tower τ of height n with μ(
τ) > 1 –
ε. Our goal is to find a lower bound for the dynamical
g-entropy of a given partition. For this purpose, we will use Rokhlin towers, and we will calculate dynamical
g-entropy with respect to a given Rokhlin tower. This leads to the following quantity: Let
be a finite partition of
X and
F ∈ Σ then, we define the (static)
g-entropy of
restricted to
F as:
The following lemma gives the estimation for H(g, ) from below by the value of the g-entropy restricted to a subset of X.
Lemma 5. Let g ∈
0. Let be a finite partition, such that there exists a set E ∈
with 0 <
μ(
E) < 1
. If F ∈ Σ,
then:where.
Proof. Let
A ∈
. Three-slope inequality implies that:
Thus, for sets of measure
, we have:
Therefore, we obtain:
and:
which implies that:
The following lemma will play an important role in the proof of the main theorem of this section.
Lemma 6. Let n ∈ ℕ,
E ∈ Σ
. Let E : = {
E, X\E}
. Suppose that g ∈
0 is nonnegative in [0,
α],
where α is some positive number. Then, there exist δ > 0
and s ∈ (0,
α),
such that:for every F ∈ Σ
s.t. μ(
EΔ
F) <
δ (Δ
denotes the symmetric difference),
where.
Proof. It is easy to show that for every
n ∈ ℕ,
E ∈ Σ,
ε > 0, there exists
δ > 0, such that:
W.l.o.g., we may assume that
(adding empty sets if necessary). The nonnegativity of
g for
x ∈ [0,
α] and its concavity imply that there exists
s ∈ (0,
α), such that g is nondecreasing in [0,
s]. Fix
n ∈ ℕ and
E ∈ Σ. There exists
ε ∈ (0,
s/2), such that:
It is easy to see that for
x ∈ [0,
s], the monotonicity and subadditivity of
g implies that:
Let
F ∈ Σ be such that
μ(
EΔ
F) ≤
δ. Define
. | max{
μ(
Ai),
μ(
Bi)} <
s}. From
Equations (5) and
(6) and the monotonicity of
g in [0,
s], we obtain:
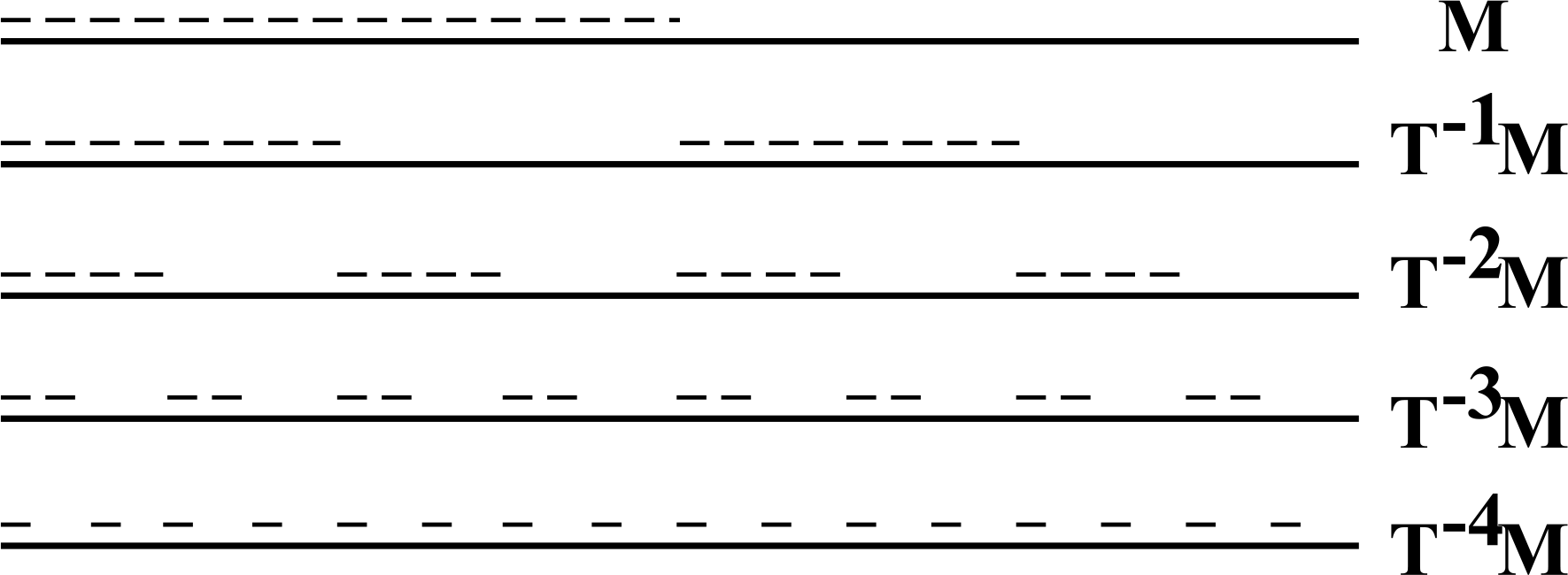
To find the lower bound for the g-entropy of a partition, we will use so-called independent sets. We construct the independent set in the following way: Let
τ be a tower of height
m. We divide the highest level of this tower (
Mm−1) into two sets of equal measure, let us say
I(m−1) and
Mm−1\
I(m−1). Next, we consider T
−1I
(m−1) and T
−1(
Mm−1\
I(m−1)). We divide each of them into two sets of equal measure, obtaining sets
, and define set
I(m−2) as the algebraic sum of two of those sets—one subset of
T−1I(m−1) and one of
T−1(
Mm−1\
I(m−1)). We perform this algorithm, until we achieve the lowest level of the tower —
M0 (see
Figure 1). Eventually, we define
. We call this set an independent set in
τ.
We can make this construction, because every aperiodic system does not have atoms of positive measure, and in every non-atomic Lebesgue space for every measurable set A and every α ∈ [0, α], there exists B ⊂ A, such that μ(B) = α.
We are able to give an explicit formula for the g-entropy of the partition generated by the independent set in τ.
Lemma 7. Let τ = (
M,
TM,...,
T2n−1M)
be the Rokhlin tower of height 2
n and I ∈ Σ
be an independent set in τ. If,
then:where φ(
x) =
g(
x)
/x for x > 0.
Proof. The independence of
I in
τ implies that the partition:
is a partition of
into 2
n sets of equal measure 2
−n. Therefore:
Theorem 3. Let and T be an aperiodic, surjective automorphism of a Lebesgue space (
X, Σ,
μ),
and let γ ∈ ℝ,
then, there exists a partition ∈
𝔅, such that: Proof. We will prove that for any
γ > 0, there exists a partition
E = {
E,
X\
E}, such that
h(
g,
) ≥
γ. We define recursively a sequence of sets
En ∈ Σ. Let:
Let
n > 0, and assume that we have already defined
En−1,
Nn−1 and
δn−1. Using Lemma 6, we can choose
δn > 0, such that:
for any
F ∈ Σ, for which
μ(
En−1 Δ
F) < 2
δn.
Since:
we can choose such
Nn ∈ ℕ that:
By Lemma 4, there exists
Mn ∈ Σ, such that
τn = (
Mn,
TMn,...,
T2Nn−1Mn) is a Rokhlin tower of measure
μ(
τn) =
δn. Let
In ⊂
τn be an independent set in
τn and:
Then:
for all positive integers
n. By
Equation (7), we have
δn < 2
−n, and we conclude that
is a Cauchy sequence in
L1(
X). Therefore, there exist
E ∈ Σ, such that
1En converges to
1E. For this set, we have:
Since
En ∩
τn =
In, applying
Equation (8) and Lemmas 5 and 7, we obtain that for
Nn, such that
δn · 2
−Nn−1 <
s:

{kind=link}
