

Averaging GPS Segments
A special issue of Applied Sciences (ISSN 2076-3417). This special issue belongs to the section "Electrical, Electronics and Communications Engineering".
Deadline for manuscript submissions: closed (31 December 2019) | Viewed by 7125
Special Issue Editors

Interests: clustering; machine learning; data mining; location-based applications
Special Issues, Collections and Topics in MDPI journals

Special Issue Information
Dear Colleagues,
Background:
In recent years, navigation- and location-based applications have seen a rise in development. For these to work reliably, up-to-date road networks are essential. Maintaining these road networks requires extensive manual editing, which has led researchers to develop automated road-network extraction methods from GPS trajectories. A common approach is to divide the task in two:
- detecting the intersections
- creating the road segments
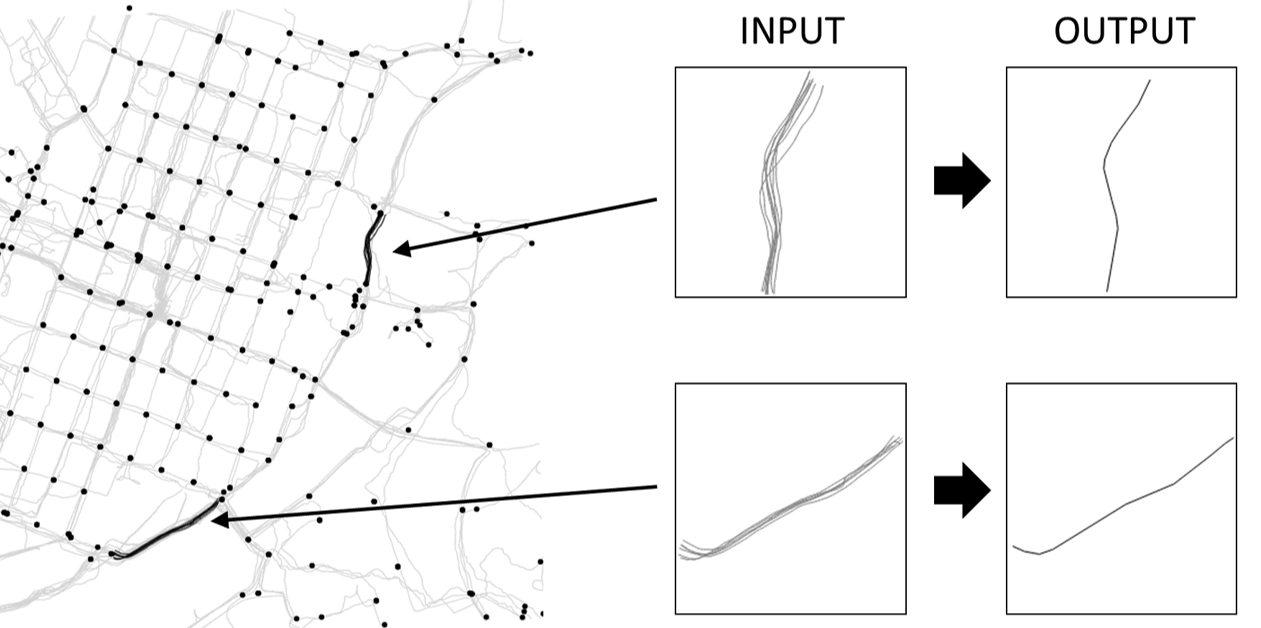
This Special Issue focuses on the later and poses the following challenge: knowing the location of the intersections and using only the GPS trajectory segments between intersection pairs, compute the road segment connecting such a pair.
Call for submissions:
The objective is to find methods to average a given set of trajectories so that they would match ground truth segments obtained from Open Street Map. The algorithm should be both effective and efficient. We organize the special issue as a challenge. We invite researchers and practitioners to:
- Submit your method in the competition
- Submit a paper to the special issue
It is possible to submit your method only to the competition but we recommend to submit also a paper to the special issue if the method has novelty. Paper submissions outside the competition are also allowed and not limited to the averaging problem. Paper submissions dealing with problems related to GPS trajectory analysis and road network construction are also welcome. All submitted papers will go through a normal review process.
Competition rules:
We will provide a training set extracted from the data in [1,2,3,4]. Submitted methods should work on all these segments but expected to generalize to other similar data beyond the training set. The methods are not allowed to utilize additional data others than what is included in the training dataset. In specific, external databases are forbidden. All submissions should be self-documented programs in Matlab, Python, C/C++, Java or PHP to be executed on a Linux machine. We provide templates for reading and writing the data. Each submission must contain:
- Source code
- Method description
- Citation (if method is existing) or a submitted paper (if the method is original)
Important dates:
- Competition opens: 1 Dec 2018
- Deadline for algorithm submissions: 15 April 2019
- Deadline for manuscript submissions: 31 May 2019
- Final results 21 June 2019
Evaluation:
All submissions will be evaluated on a different test dataset, which will be similar to the training set but larger. The resulting segment averages will be compared with ground truth extracted from OpenStreetMap. The main criteria in the competition will be quality. The evaluation will be done by visual inspection and an objective measure that will be revealed later. Trajectory similarity will also be calculated using other measures (DTW, Hausdorff, and Frechet) to gain more insight. Secondary criteria will be the speed and simplicity of the algorithm. We will evaluate all methods by running them on the same Dell R920 machine with 4 x E7-4860 (total 48 cores), 1 TB, and 4 TB SAS HD.
Results:
Results will be published on the competition website by 21 June 2019, latest. Intermediate results on the training data will be available already during the competition immediately after every upload. We will provide the following outcomes from the competition:
- Two ranking lists: quality and speed (quality <10% worse than that of the winner)
- Results will be fully documented and published later as a paper
- All test data will also be published
- The winner will be invited to visit the Machine Learning group at UEF. We cover reasonable travel and accommodation expenses, and provide VIP treatment during the visit
Competition web site:
http://cs.uef.fi/sipu/segments/
Prof. Dr. Pasi Fränti
Dr. Radu Mariescu-Istodor
Guest Editors
References:
- Ahmed, S. Karagiorgou, D. Pfoser, and C. Wenk. 2015. "A Comparison and Evaluation of Map Construction Algorithms". GeoInformatica, 19 (3), pp. 601-632.
- Biagioni and J. Eriksson. 2012. "Inferring road maps from global positioning system traces: Survey and comparative evaluation". Transportation Research Record: Journal of the Transportation Research Board, (2291), pp. 61-71.
- Mariescu-Istodor and P. Fränti, "Grid-based method for GPS route analysis for retrieval" ACM Transactions on Spatial Algorithms and Systems 3 (3), July 2017.
- Mariescu-Istodor and P. Fränti. "Cellnet: Inferring road networks from gps trajectories." ACM Transactions on Spatial Algorithms and Systems 4, no. 3 (2018): 8.
Manuscript Submission Information
Manuscripts should be submitted online at www.mdpi.com by registering and logging in to this website. Once you are registered, click here to go to the submission form. Manuscripts can be submitted until the deadline. All submissions that pass pre-check are peer-reviewed. Accepted papers will be published continuously in the journal (as soon as accepted) and will be listed together on the special issue website. Research articles, review articles as well as short communications are invited. For planned papers, a title and short abstract (about 250 words) can be sent to the Editorial Office for assessment.
Submitted manuscripts should not have been published previously, nor be under consideration for publication elsewhere (except conference proceedings papers). All manuscripts are thoroughly refereed through a single-blind peer-review process. A guide for authors and other relevant information for submission of manuscripts is available on the Instructions for Authors page. Applied Sciences is an international peer-reviewed open access semimonthly journal published by MDPI.
Please visit the Instructions for Authors page before submitting a manuscript. The Article Processing Charge (APC) for publication in this open access journal is 2400 CHF (Swiss Francs). Submitted papers should be well formatted and use good English. Authors may use MDPI's English editing service prior to publication or during author revisions.
Keywords
- GPS
- trajectory
- segments
- averaging
- road network
Benefits of Publishing in a Special Issue
- Ease of navigation: Grouping papers by topic helps scholars navigate broad scope journals more efficiently.
- Greater discoverability: Special Issues support the reach and impact of scientific research. Articles in Special Issues are more discoverable and cited more frequently.
- Expansion of research network: Special Issues facilitate connections among authors, fostering scientific collaborations.
- External promotion: Articles in Special Issues are often promoted through the journal's social media, increasing their visibility.
- Reprint: MDPI Books provides the opportunity to republish successful Special Issues in book format, both online and in print.
Further information on MDPI's Special Issue policies can be found here.