Collaboration of Drone and Internet of Public Safety Things in Smart Cities: An Overview of QoS and Network Performance Optimization




Abstract
:1. Introduction
1.2. Related Work
2. Public Safety Network
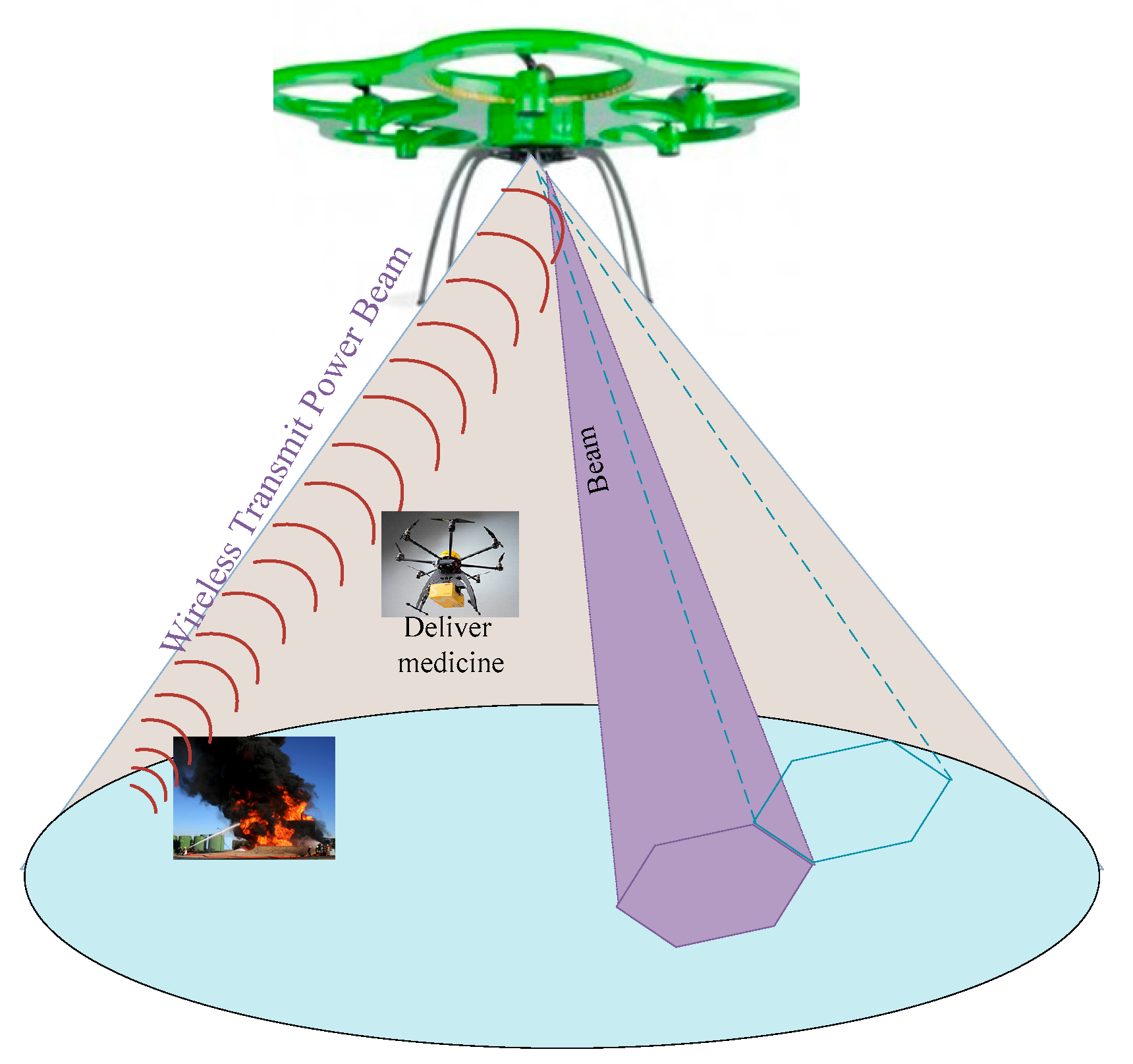
2.1. Drones for Public Safety
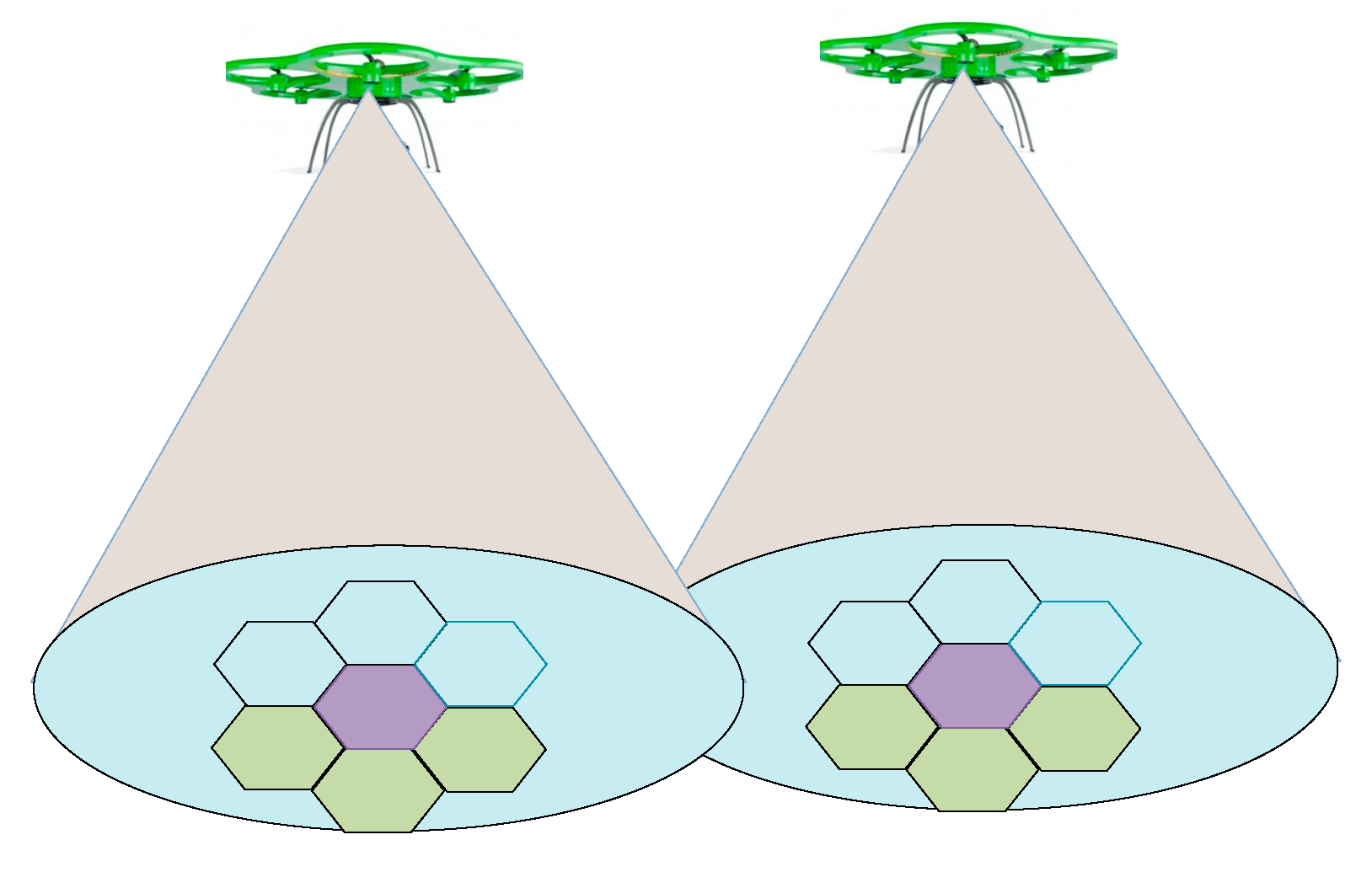
2.1.1. Coverage Area
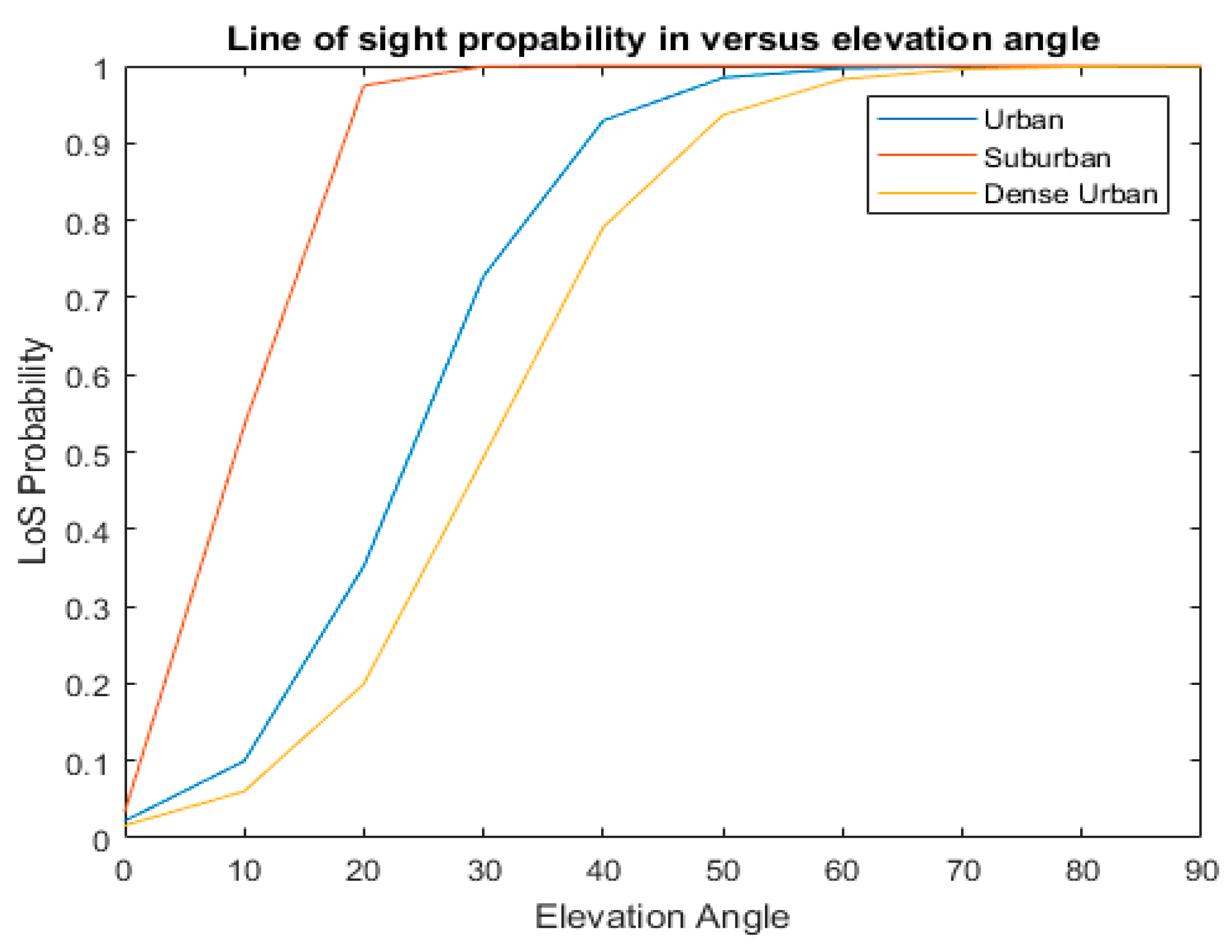
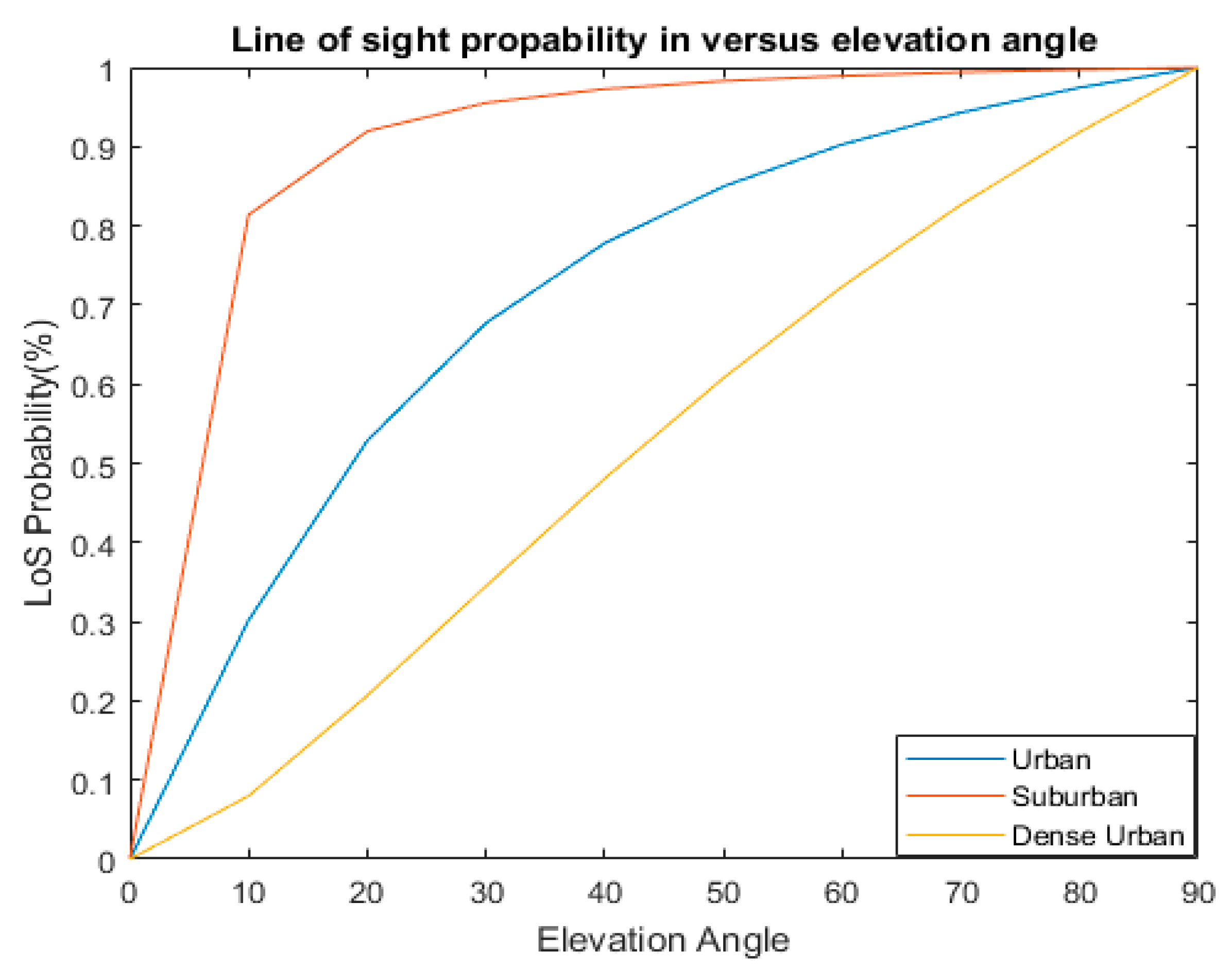
2.1.2. Probability of Line of Sight
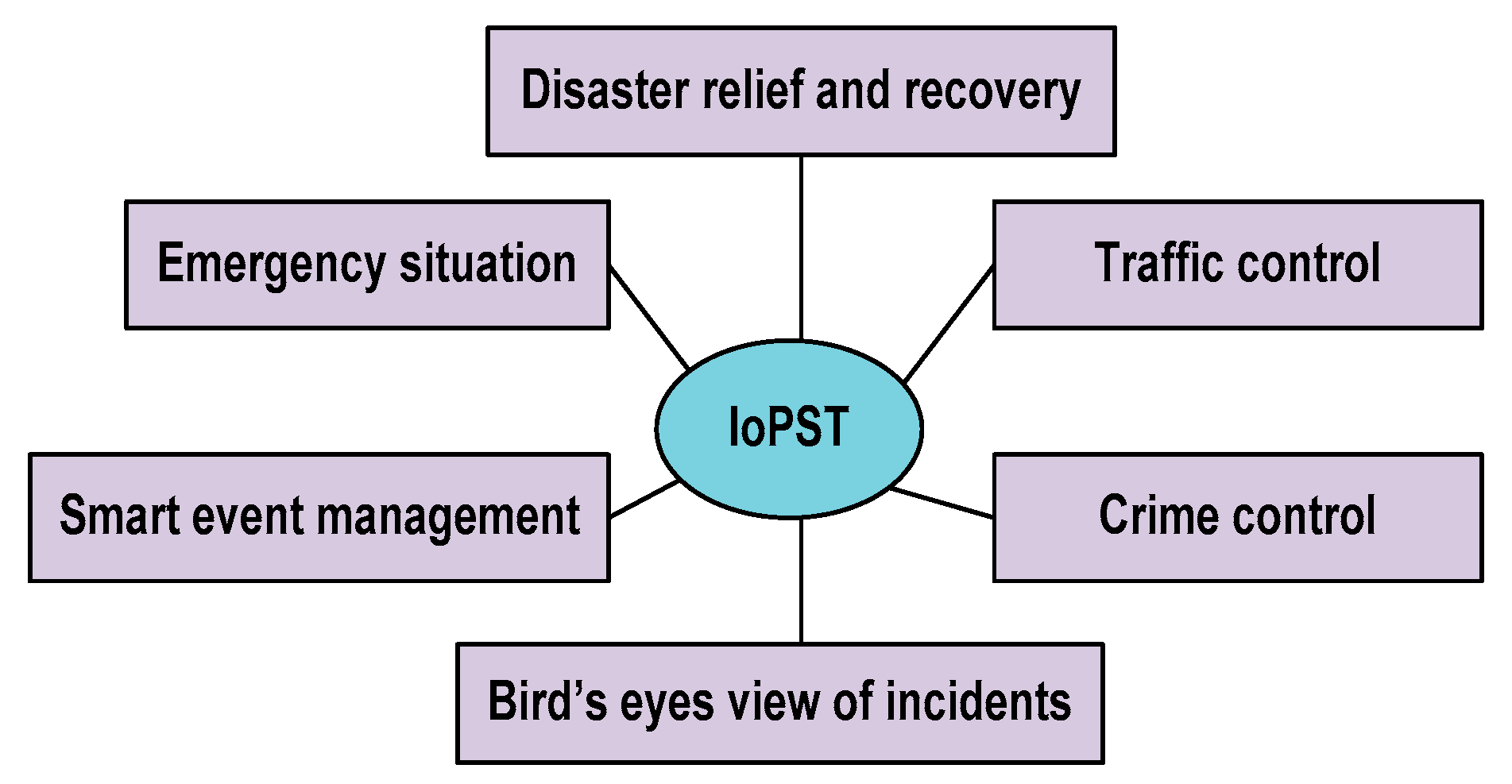
2.2. IoT Devices for Public Safety
2.3. Drones and IoT for Public Safety
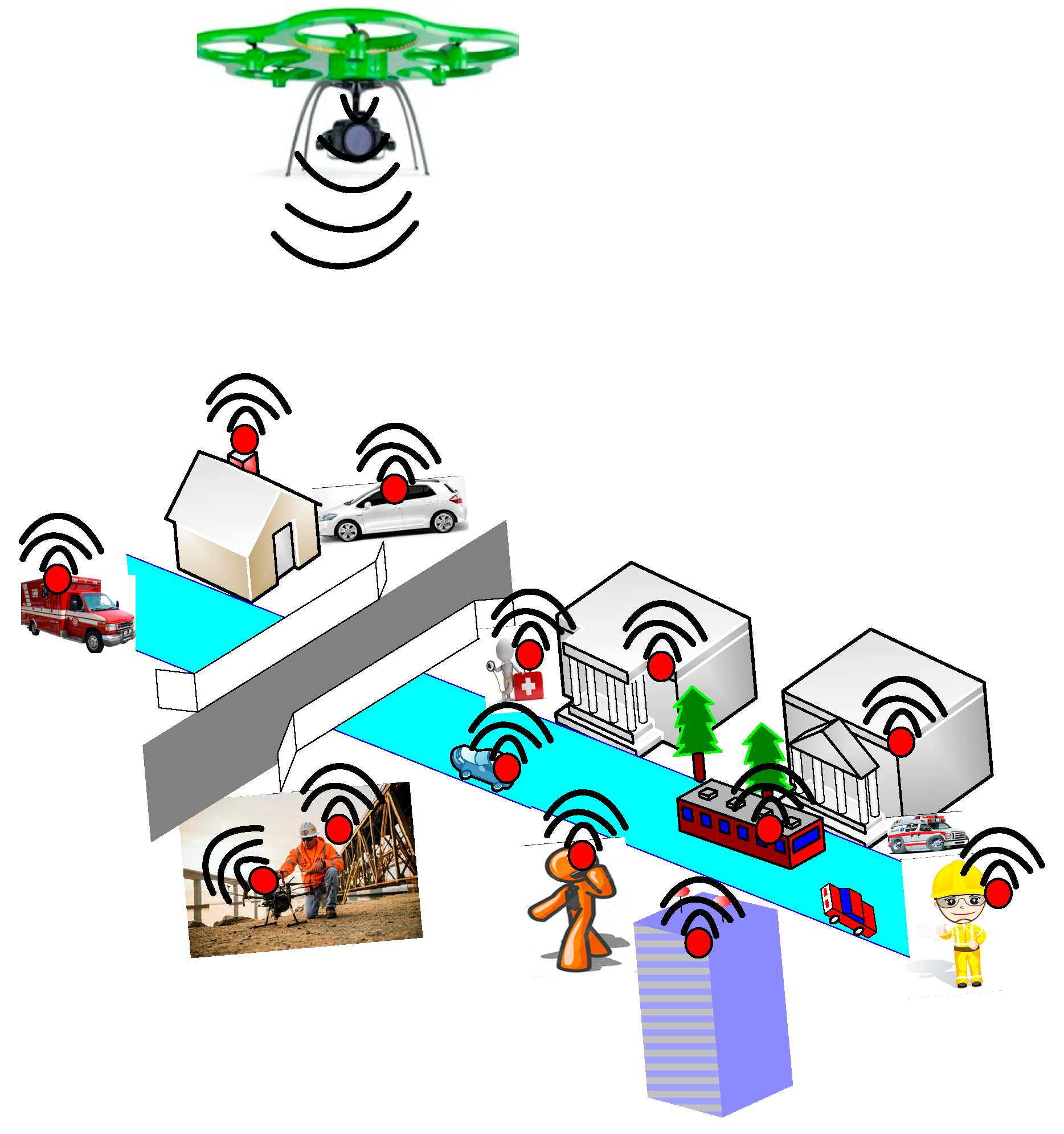
3. Collaboration of Drones and Internet of Public Safety Things
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fraga-Lamas, P.; Fernández-Caramés, T.M.; Suárez-Albela, M.; Castedo, L.; González-López, M. A review on internet of things for defense and public safety. Sensors 2016, 16, 1644. [Google Scholar] [CrossRef] [PubMed]
- Mehmood, Y.; Ahmad, F.; Yaqoob, I.; Adnane, A.; Imran, M.; Guizani, S. Internet-of-things-based smart cities: Recent advances and challenges. IEEE Commun. Mag. 2017, 55, 16–24. [Google Scholar] [CrossRef]
- Dhillon, H.S.; Huang, H.; Viswanathan, H. Wide-area wireless communication challenges for the Internet of Things. IEEE Commun. Mag. 2017, 55, 168–174. [Google Scholar] [CrossRef]
- Mohamed, N.; Al-Jaroodi, J.; Jawhar, I.; Idries, A.; Mohammed, F. Unmanned aerial vehicles applications in future smart cities. Technol. Forecast. Soc. Chang. 2018, in press. [Google Scholar] [CrossRef]
- Alsamhi, S.; Ma, O.; Ansari, M. Artificial Intelligence-Based Techniques for Emerging Robotics Communication: A Survey and Future Perspectives. arXiv, 2018; arXiv:1804.09671. [Google Scholar]
- Kolios, P.; Pitsillides, A.; Mokryn, O.; Papdaki, K. 7—Data Dissemination in Public Safety Networks. In Wireless Public Safety Networks 2; Câmara, D., Nikaein, N., Eds.; Elsevier: Amsterdam, The Netherlands, 2016; pp. 199–225. [Google Scholar]
- Gomez, K.; Hourani, A.; Goratti, L.; Riggio, R.; Kandeepan, S.; Bucaille, I. Capacity evaluation of aerial LTE base-stations for public safety communications. In Proceedings of the 2015 European Conference on Networks and Communications (EuCNC), Paris, France, 29 June–2 July 2015; pp. 133–138. [Google Scholar]
- Komnakos, D.; Vouyioukas, D.; Maglogiannis, I.; Constantinou, P. Performance evaluation of an enhanced uplink 3.5 G system for mobile healthcare applications. Int. J. Telemed. Appl. 2008, 2008. [Google Scholar] [CrossRef]
- Alsamhi, S.; Rajput, N. An Efficient Channel Reservation Technique for Improved QoS for Mobile Communication Deployment Using High Altitude Platform. Wirel. Pers. Commun. 2016, 91, 1095–1108. [Google Scholar] [CrossRef]
- Lee, Y.-M.; Ku, B.-L.; Ahn, D.-S. A satellite core network system for emergency management and disaster recovery. In Proceedings of the 2010 International Conference on Information and Communication Technology Convergence (ICTC), Jeju, South Korea, 17–19 November 2010; pp. 549–552. [Google Scholar]
- Alsamhi, S.H.; Ansari, M.S.; Ma, O.; Almalki, F.; Gupta, S.K. Tethered Balloon Technology in Design Solutions for Rescue and Relief Team Emergency Communication Services. Disaster Med. Public Health Prep. 2018, 1–8. [Google Scholar] [CrossRef]
- Yoo, J. Performance Evaluation of Voice Over IP on WiMAX and Wi-Fi Based Networks. Communication Networks 2009. Available online: http://www2.ensc.sfu.ca/~ljilja/ENSC427/Spring09/Projects/team1/ensc427-finalreport.pdf (accessed on 5 November 2018).
- Mohorcic, M.; Grace, D.; Kandus, G.; Tozer, T. Broadband Communications from Aerial Platform Networks. In Proceedings of the 13th IST Mobile & Wireless Communications Summit, Lyon, France, 27–30 June 2004. [Google Scholar]
- Mohammed, A.; Arnon, S.; Grace, D.; Mondin, M.; Miura, R. Advanced Communication Techniques and Applications for High-Altitude Platforms. EURASIP J. Wirel. Commun. Netw. 2008, 2008. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Rajput, N.S. An Intelligent Hand-off Algorithm to Enhance Quality of Service in High Altitude Platforms Using Neural Network. Wirel. Pers. Commun. 2015, 82, 2059–2073. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Rajput, N.S. Methodology for Mitigation of Interferences from High Altitude Platform Ground Station to Terrestrial Stations. Int. J. Sci. Eng. Res. (IJSER) 2012, 3, 1–7. [Google Scholar]
- Alsamhi, S.H.; Rajput, N.S. Implementation of call admission control technique in HAP for enhanced QoS in wireless network deployment. Telecommun. Syst. 2015, 63, 141–151. [Google Scholar] [CrossRef]
- Deaton, J.D. High Altitude Platforms for Disaster Recovery: Capabilities, Strategies, and Techniques for EmergencyTelecommunications. EURASIP J. Wirel. Commun. Netw. 2008, 2008, 1–8. [Google Scholar] [CrossRef]
- Alsamhi, S.H.; Ansari, M.S.; Rajput, N.S. Disaster coverage predication for the emerging tethered balloon technology: Capability for preparedness, detection, mitigation, and response. Disaster Med. Public Health Prep. 2017, 12, 222–231. [Google Scholar] [CrossRef] [PubMed]
- Khaleefa, S.; Alsamhi, S.; Rajput, N. Tethered Balloon Technology for Telecommunication, Coverage and Path Loss. In Proceedings of the 2014 IEEE Students’ Conference on Electrical, Electronics and Computer Science (SCEECS), Bhopal, India, 1–2 March 2014; pp. 1–4. [Google Scholar]
- Alsamhi, S.H.; Rajput, N.S. An Intelligent HAP for Broadband Wireless Communications: Developments, QoS and Applications. Int. J. Electron. Electr. Eng. 2015, 3, 3. [Google Scholar] [CrossRef]
- Guillen-Perez, A.; Cano, M.-D. Flying Ad Hoc Networks: A New Domain for Network Communications. Sensors 2018, 18, 3571. [Google Scholar] [CrossRef] [PubMed]
- Vattapparamban, E.; Güvenç, İ.; Yurekli, A.İ.; Akkaya, K.; Uluağaç, S. Drones for smart cities: Issues in cybersecurity, privacy, and public safety. In Proceedings of the 2016 International Wireless Communications and Mobile computing Conference (IWCMC), Paphos, Cyprus, 5–9 September 2016; pp. 216–221. [Google Scholar]
- Hu, B.; Wang, C.A.; Chen, S.; Wang, L.; Yang, H. Proactive Coverage Area Decisions Based on Data Field for Drone Base Station Deployment. Sensors 2018, 18, 3917. [Google Scholar] [CrossRef] [PubMed]
- Wu, Q.; Zhang, R. Common throughput maximization in UAV-enabled OFDMA systems with delay consideration. IEEE Trans. Commun. 2018, 66, 6614–6627. [Google Scholar] [CrossRef]
- Al-Fuqaha, A.; Guizani, M.; Mohammadi, M.; Aledhari, M.; Ayyash, M. Internet of things: A survey on enabling technologies, protocols, and applications. IEEE Commun. Surv. Tutor. 2015, 17, 2347–2376. [Google Scholar] [CrossRef]
- Sharma, V.; Kumar, R. Cooperative frameworks and network models for flying ad hoc networks: A survey. Concurr. Comput. Pract. Exp. 2017, 29, e3931. [Google Scholar] [CrossRef]
- Sharma, V.; Kumar, R. G-FANET: An ambient network formation between ground and flying ad hoc networks. Telecommun. Syst. 2017, 65, 31–54. [Google Scholar] [CrossRef]
- Grieco, L.A.; Rizzo, A.; Colucci, S.; Sicari, S.; Piro, G.; Di Paola, D.; Boggia, G. IoT-aided robotics applications: Technological implications, target domains and open issues. Comput. Commun. 2014, 54, 32–47. [Google Scholar] [CrossRef]
- Dutta, V.; Zielinska, T. Networking technologies for robotic applications. arXiv, 2015; arXiv:1505.07593. [Google Scholar]
- Dauphin, L.; Adjih, C.; Petersen, H.; Baccelli, E. Low-Cost Robots in the Internet of Things: Hardware, Software & Communication Aspects. In Proceedings of the 2017 International Conference on Embedded Wireless Systems and Networks, Uppsala, Sweden, 20–22 February 2017; pp. 284–289. [Google Scholar]
- Zanella, A.; Bui, N.; Castellani, A.; Vangelista, L.; Zorzi, M. Internet of things for smart cities. IEEE Internet Things J. 2014, 1, 22–32. [Google Scholar] [CrossRef]
- Roy Chowdhury, A. IoT and Robotics: A synergy. PeerJ Prepr. 2017, 5, e2760v1. [Google Scholar] [CrossRef]
- Sharma, V.; Song, F.; You, I.; Atiquzzaman, M. Energy efficient device discovery for reliable communication in 5G-based IoT and BSNs using unmanned aerial vehicles. J. Netw. Comput. Appl. 2017, 97, 79–95. [Google Scholar] [CrossRef]
- Vermesan, O.; Bröring, A.; Tragos, E.; Serrano, M.; Bacciu, D.; Chessa, S.; Gallicchio, C.; Micheli, A.; Dragone, M.; Saffiotti, A. Internet of robotic things: Converging sensing/actuating, hypoconnectivity, artificial intelligence and IoT Platforms. In Cognitive Hyperconnected Digital Transformation: Internet of Things Intelligence Evolution; River Publishers: Gistrup, Denmark, 2017; pp. 1–35. [Google Scholar]
- Long, T.; Ozger, M.; Cetinkaya, O.; Akan, O.B. Energy neutral internet of drones. IEEE Commun. Mag. 2018, 56, 22–28. [Google Scholar] [CrossRef]
- Alsamhi, S.; Ma, O.; Ansari, M.S.; Meng, Q. Greening Internet of Things for Smart Everythings with A Green-Environment Life: A Survey and Future Prospects. arXiv, 2018; arXiv:1805.00844. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Nam, Y.-H.; Debbah, M. A tutorial on UAVs for wireless networks: Applications, challenges, and open problems. arXiv, 2018; arXiv:1803.00680. [Google Scholar]
- Mozaffari, M.; Kasgari, A.T.Z.; Saad, W.; Bennis, M.; Debbah, M. Beyond 5G with UAVs: Foundations of a 3D Wireless Cellular Network. arXiv, 2018; arXiv:1805.06532. [Google Scholar] [CrossRef]
- Yanmaz, E.; Yahyanejad, S.; Rinner, B.; Hellwagner, H.; Bettstetter, C. Drone networks: Communications, coordination, and sensing. Ad Hoc Netw. 2018, 68, 1–15. [Google Scholar] [CrossRef]
- Sánchez-García, J.; García-Campos, J.; Arzamendia, M.; Reina, D.; Toral, S.; Gregor, D. A survey on unmanned aerial and aquatic vehicle multi-hop networks: Wireless communications, evaluation tools and applications. Comput. Commun. 2018, 119, 43–65. [Google Scholar] [CrossRef]
- Sharma, V. An Energy-Efficient Transaction Model for the Blockchain-enabled Internet of Vehicles (IoV). IEEE Commun. Lett. 2018. [Google Scholar] [CrossRef]
- Wang, Q.; Lee, B.; Murray, N.; Qiao, Y. MR-IoT: An information centric MapReduce framework for IoT. In Proceedings of the 2018 15th IEEE Annual Consumer Communications & Networking Conference (CCNC), Las Vegas, NV, USA, 12–15 January 2018; pp. 1–6. [Google Scholar]
- Pahl, C.; El Ioini, N.; Helmer, S.; Lee, B. An architecture pattern for trusted orchestration in IoT edge clouds. In Proceedings of the 2018 Third International Conference on Fog and Mobile Edge Computing (FMEC), Barcelona, Spain, 23–26 April 2018; pp. 63–70. [Google Scholar]
- Msadaa, I.C.; Dhraief, A. Internet of Things in Support of Public Safety Networks: Opportunities and Challenges. In Wireless Public Safety Networks 2; Elsevier: Amsterdam, The Netherlands, 2016; pp. 1–23. [Google Scholar]
- Chen, X.; Guo, D. Public Safety Broadband Network with Rapid-deployment Base Stations. In Wireless Public Safety Networks 2; Elsevier: Amsterdam, The Netherlands, 2016; pp. 173–198. [Google Scholar]
- Favraud, R.; Apostolaras, A.; Nikaein, N.; Korakis, T. Public Safety Networks: Enabling Mobility for Critical Communications. In Wireless Public Safety Networks 2; Elsevier: Amsterdam, The Netherlands, 2016; pp. 95–126. [Google Scholar]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Unmanned aerial vehicle with underlaid device-to-device communications: Performance and tradeoffs. IEEE Trans. Wirel. Commun. 2016, 15, 3949–3963. [Google Scholar] [CrossRef]
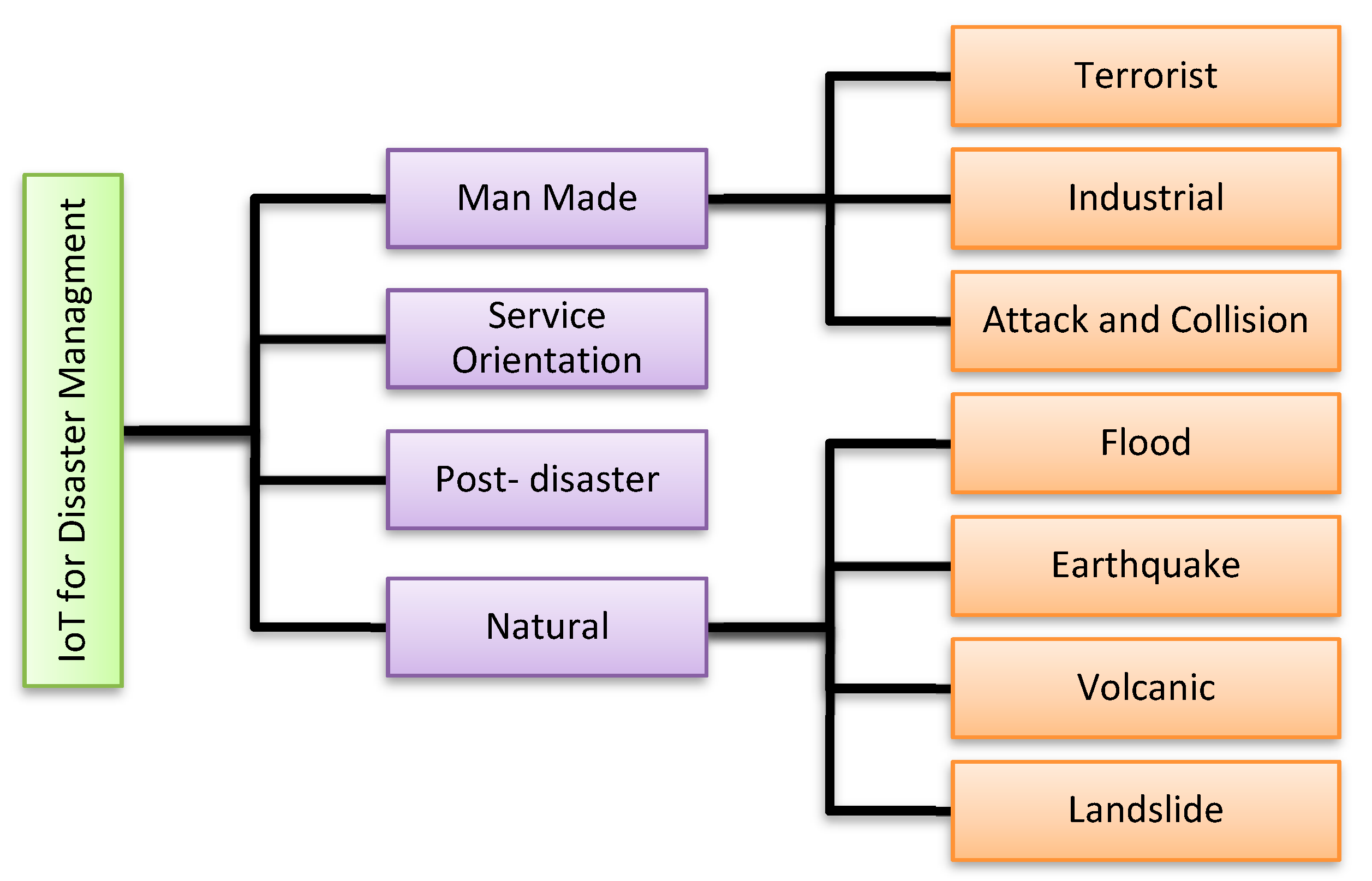
- Ray, P.P.; Mukherjee, M.; Shu, L. Internet of things for disaster management: State-of-the-art and prospects. IEEE Access 2017, 5, 18818–18835. [Google Scholar] [CrossRef]
- Reina, D.; Camp, T.; Munjal, A.; Toral, S.; Tawfik, H. Evolutionary Deployment and Hill Climbing-Based Movements of Multi-UAV Networks in Disaster Scenarios. In Applications of Big Data Analytics; Springer: Berlin, Germay, 2018; pp. 63–95. [Google Scholar]
- Reina, D.G.; Camp, T.; Munjal, A.; Toral, S.L. Evolutionary deployment and local search-based movements of 0th responders in disaster scenarios. Future Gener. Comput. Syst. 2018, 88, 61–78. [Google Scholar] [CrossRef]
- Alsamhi, S.; Ma, O.; Ansari, M. Predictive Estimation of the Optimal Signal Strength from Unmanned Aerial Vehicle over Internet of Things Using ANN. arXiv, 2018; arXiv:1805.07614. [Google Scholar]
- Naqvi, S.A.R.; Hassan, S.A.; Pervaiz, H.; Ni, Q. Drone-aided communication as a key enabler for 5G and resilient public safety networks. IEEE Commun. Mag. 2018, 56, 36–42. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Chandrasekharan, S.; Kandeepan, S.; Jamalipour, A. Aerial platforms for public safety networks and performance optimization. In Wireless Public Safety Networks 3; Elsevier: Amsterdam, The Netherlands, 2017; pp. 133–153. [Google Scholar]
- Brokaw, A. Autonomous search-and rescue drones outperform humans at navigating forest trails. Verge 2016, 11. Available online: https://www.theverge.com/2016/2/11/10965414/autonomous-drones-deep-learning-navigation-mapping (accessed on 5 November 2018).
- Alzenad, M.; El-Keyi, A.; Yanikomeroglu, H. 3D placement of an unmanned aerial vehicle base station for maximum coverage of users with different QoS requirements. IEEE Wirel. Commun. Lett. 2018, 7, 38–41. [Google Scholar] [CrossRef]
- Shi, W.; Li, J.; Xu, W.; Zhou, H.; Zhang, N.; Zhang, S.; Shen, X. Multiple Drone-Cell Deployment Analyses and Optimization in Drone Assisted Radio Access Networks. IEEE Access 2018, 6, 12518–12529. [Google Scholar] [CrossRef]
- He, X.; Yu, W.; Xu, H.; Lin, J.; Yang, X.; Lu, C.; Fu, X. Towards 3D Deployment of UAV Base Stations in Uneven Terrain. In Proceedings of the 2018 27th International Conference on Computer Communication and Networks (ICCCN), Hangzhou, China, 30 July–2 August 2018; pp. 1–9. [Google Scholar]
- Chou, S.-F.; Yu, Y.-J.; Pang, A.-C.; Lin, T.-A. Energy-Aware 3D Aerial Small-Cell Deployment over Next Generation Cellular Networks. In Proceedings of the 2018 IEEE 87th Vehicular Technology Conference (VTC Spring), Porto, Portugal, 3–6 June 2018; pp. 1–5. [Google Scholar]
- Kosmerl, J.; Vilhar, A. Base stations placement optimization in wireless networks for emergency communications. In Proceedings of the 2014 IEEE International Conference on Communications Workshops (ICC), Sydney, NSW, Australia, 10–14 June 2014; pp. 200–205. [Google Scholar]
- Shinohara, N. Wireless Power Transfer Via Radiowaves; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Bush, S.F. Smart Grid: Communication-Enabled Intelligence for the Electric Power Grid; John Wiley & Sons: Hoboken, NJ, USA, 2014. [Google Scholar]
- Holis, J.; Pechac, P. Elevation dependent shadowing model for mobile communications via high altitude platforms in built-up areas. IEEE Trans. Antennas Propag. 2008, 56, 1078–1084. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Kandeepan, S.; Jamalipour, A. Modeling air-to-ground path loss for low altitude platforms in urban environments. In Proceedings of the 2014 IEEE Global Communications Conference (GLOBECOM), Austin, TX, USA, 8–12 December 2014; pp. 2898–2904. [Google Scholar]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP altitude for maximum coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Zheng, Y.; Wang, Y.; Meng, F. Modeling and simulation of pathloss and fading for air-ground link of HAPs within a network simulator. In Proceedings of the 2013 International Conference on Cyber-Enabled Distributed Computing and Knowledge Discovery (CyberC), Beijing, China, 10–12 October 2013; pp. 421–426. [Google Scholar]
- Dubey, R.; Luo, Z.; Xu, M.; Wamba, S.F. Developing an integration framework for crowdsourcing and Internet of Things with applications for disaster response. In Proceedings of the 2015 IEEE International Conference on Data Science and Data Intensive Systems (DSDIS), Sydney, NSW, Australia, 11–13 December 2015; pp. 520–524. [Google Scholar]
- Gautam, B.P.; Wasaki, K.; Sharma, N. A novel approach of fault management and restoration of network services in IoT cluster to ensure disaster readiness. In Proceedings of the 2016 International Conference on Networking and Network Applications (NaNA), Hakodate, Japan, 23–25 July 2016; pp. 423–428. [Google Scholar]
- Poslad, S.; Middleton, S.E.; Chaves, F.; Tao, R.; Necmioglu, O.; Bügel, U. A semantic IoT early warning system for natural environment crisis management. IEEE Trans. Emerg. Top. Comput. 2015, 3, 246–257. [Google Scholar] [CrossRef]
- Mozaffari, M.; Saad, W.; Bennis, M.; Debbah, M. Drone small cells in the clouds: Design, deployment and performance analysis. In Proceedings of the 2015 IEEE Global Communications Conference (GLOBECOM), San Diego, CA, USA, 6–10 December 2015; pp. 1–6. [Google Scholar]
- Zhong, D.; Lv, H.; Han, J.; Wei, Q. A practical application combining wireless sensor networks and internet of things: Safety management system for tower crane groups. Sensors 2014, 14, 13794–13814. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Highlighted | SAR | IoT | Drone | Smart Cities | Public Safety | Focus |
|---|---|---|---|---|---|---|---|
| Reina et al. [50] (2018) | Importance of using IoT and big data for disaster management and public safety | √ | √ | √ | √ |
| |
| Mozaffari et al. [48] (2016) | Drone deployment to provide wireless communications services to a given area | √ | √ | √ | √ |
| |
| Zanella et al. [32] (2014) | IoT for smart cities | √ | √ |
| |||
| Alsamhi et al. [37] (2018) | Green IoT for healthy environment and in smart cities | √ | √ | √ | √ |
| |
| Msadaa et al. [45] (2016) | IoT in Support of Public Safety Networks | √ | √ | - | - | √ |
|
| Mehmood et al. [2] (2017) | Devise a taxonomy of the IoT-based smart city | ⚬ √ | ⚬ | ⚬ √ | ⚬ |
| |
| Chen et al. [46] (2016) | Average traffic of public safety networks architecture | ⚬ √ | ⚬ | ⚬ | ⚬ | ⚬ √ |
|
| Favraud et al. [47] (2016) | LTE network architecture towards 5G in order to support emerging PS | ⚬ | ⚬ | ⚬ | ⚬ √ | ⚬ √ |
|
| Naqviet al. [53] (2018) | Importance of incorporating the drones in the heterogeneous network for capacity and coverage extension | √ | √ | √ |
| ||
| Kolios et al. [6] (2016) | The communication technologies that enable data dissemination in public safety networks | √ | √ |
| |||
| Mohamed et al. [4] (2018) | Integrating drones in smart cities | √ | √ | √ | √ |
| |
| Reina et al. [51] (2018) | Drone as 0th responders and its best position | √ | √ | √ | √ |
| |
| Alsamhi et al. [52] (2018) | Signal strength between drone and IoT device in smart cities | √ | √ | √ |
| ||
| Alsamhi et al. [The proposed work] | Collaboration of drone and Internet of public safety things | √ | √ | √ | √ | √ |
|
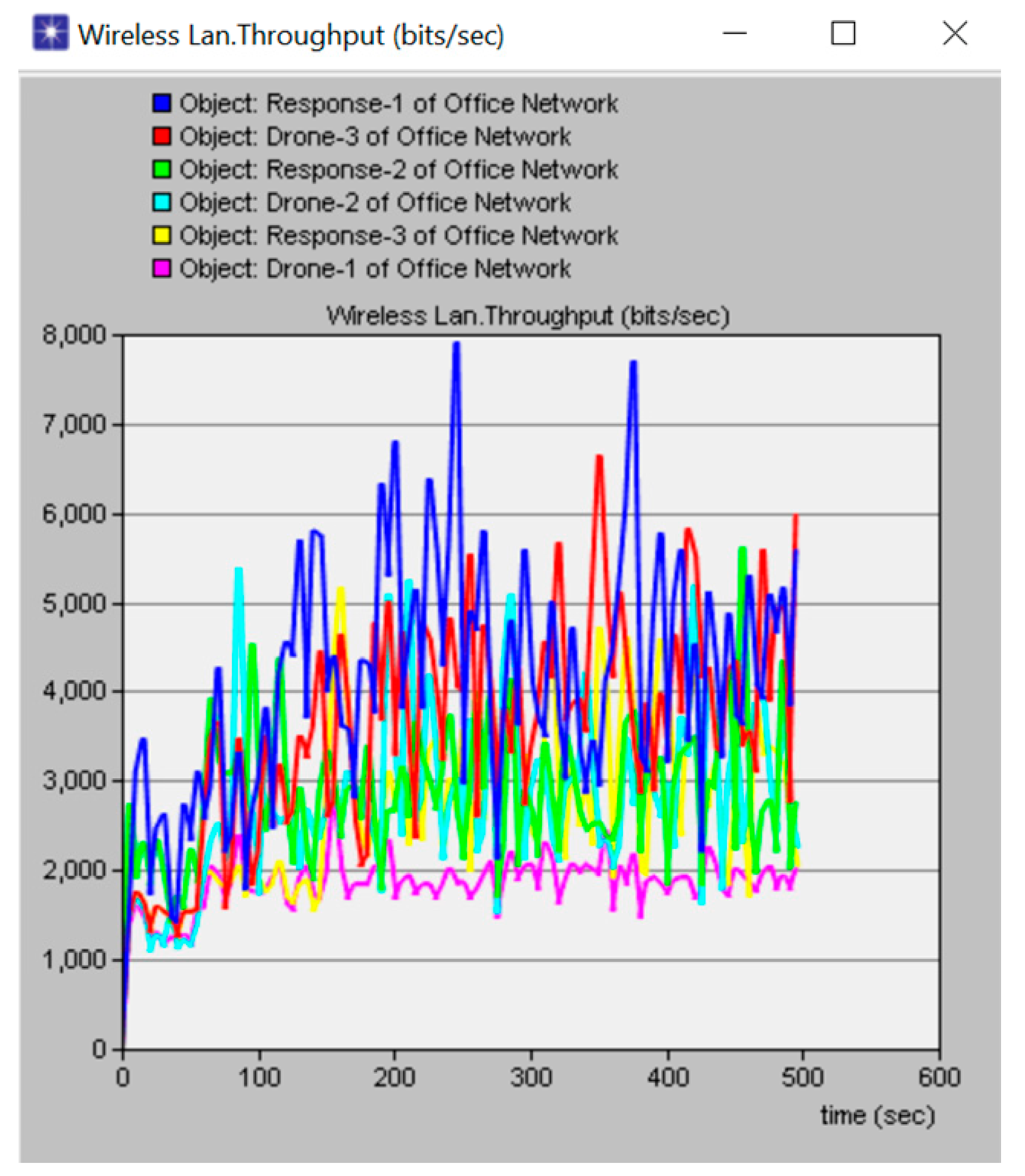
| Object | Minimum | Maximum | Average | Std Dev |
|---|---|---|---|---|
| SAR-1 | 0 | 7908.8 | 4016.3 | 1368.3 |
| Drone-3 | 0 | 6648.0 | 3496.3 | 1243.9 |
| SAR-2 | 0 | 5624.0 | 2788.6 | 782.0 |
| Drone-2 | 0 | 5395.2 | 2722.4 | 963.7 |
| SAR-3 | 0 | 5180.8 | 2620.0 | 926.9 |
| Drone-1 | 0 | 2814.4 | 1827.2 | 330.3 |
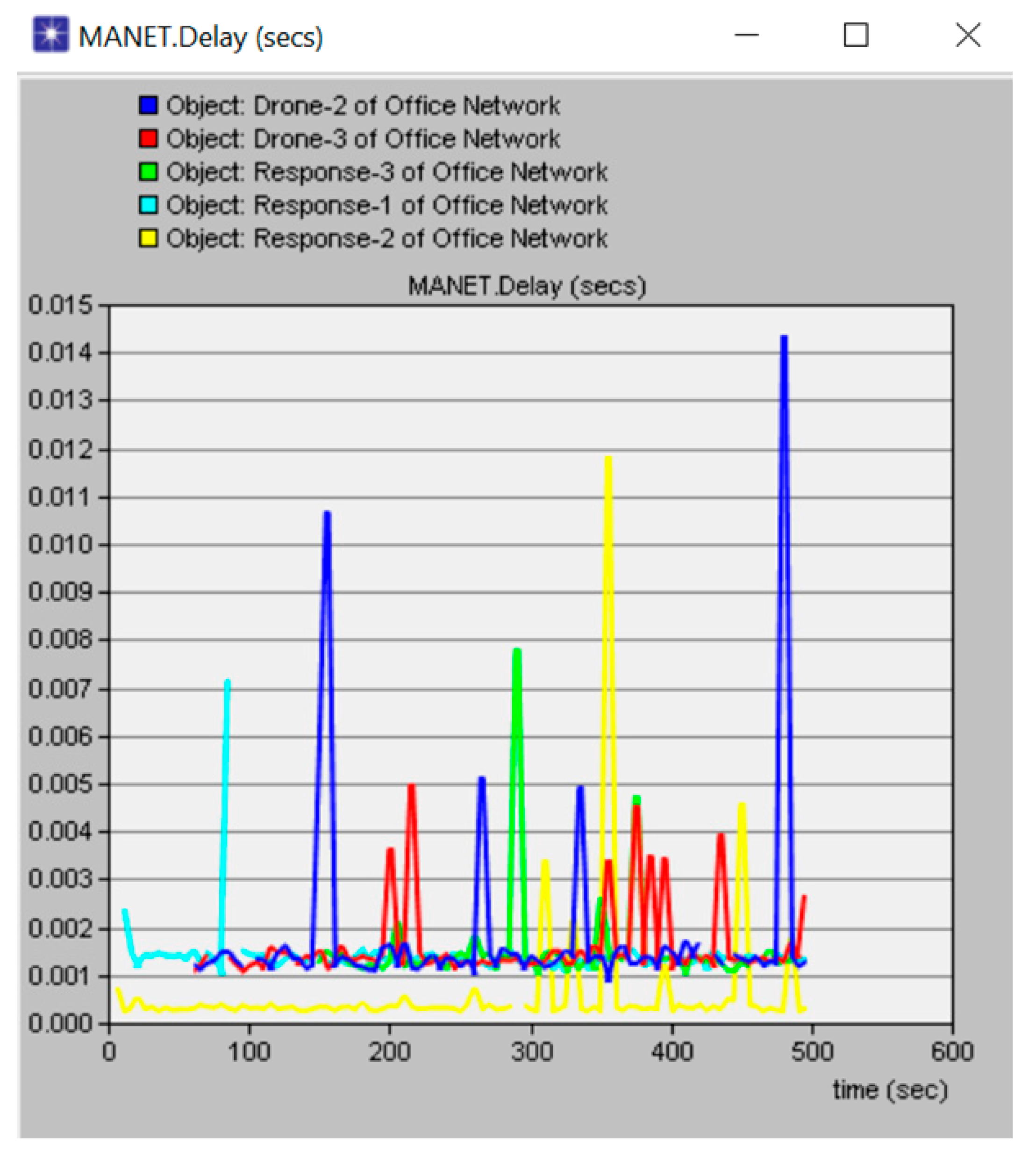
| Object | Minimum | Maximum | Average | Std Dev |
|---|---|---|---|---|
| Drone-2 | 0.0008937 | 0.014345 | 0.0017257 | 0.0018513 |
| Drone-3 | 0.0010700 | 0.005018 | 0.0015526 | 0.0007544 |
| SAR-3 | 0.0010346 | 0.007813 | 0.0014888 | 0.0009098 |
| SAR-1 | 0.0010634 | 0.007173 | 0.0014134 | 0.0006074 |
| SAR-2 | 0.0002425 | 0.011812 | 0.0005631 | 0.0012831 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alsamhi, S.H.; Ma, O.; Ansari, M.S.; Gupta, S.K. Collaboration of Drone and Internet of Public Safety Things in Smart Cities: An Overview of QoS and Network Performance Optimization. Drones 2019, 3, 13. https://doi.org/10.3390/drones3010013
Alsamhi SH, Ma O, Ansari MS, Gupta SK. Collaboration of Drone and Internet of Public Safety Things in Smart Cities: An Overview of QoS and Network Performance Optimization. Drones. 2019; 3(1):13. https://doi.org/10.3390/drones3010013
Chicago/Turabian StyleAlsamhi, Saeed H., Ou Ma, M. Samar Ansari, and Sachin Kumar Gupta. 2019. "Collaboration of Drone and Internet of Public Safety Things in Smart Cities: An Overview of QoS and Network Performance Optimization" Drones 3, no. 1: 13. https://doi.org/10.3390/drones3010013
APA StyleAlsamhi, S. H., Ma, O., Ansari, M. S., & Gupta, S. K. (2019). Collaboration of Drone and Internet of Public Safety Things in Smart Cities: An Overview of QoS and Network Performance Optimization. Drones, 3(1), 13. https://doi.org/10.3390/drones3010013