

Theoretical Analysis of a Fractional-Order LLCL Filter for Grid-Tied Inverters



Abstract
1. Introduction
- The characteristics of the FOLLCL filter is analyzed, including the condition of resonance, magnitude–frequency characteristic, phase–frequency characteristic, and the impacts of inductor and capacitor orders on the characteristics.
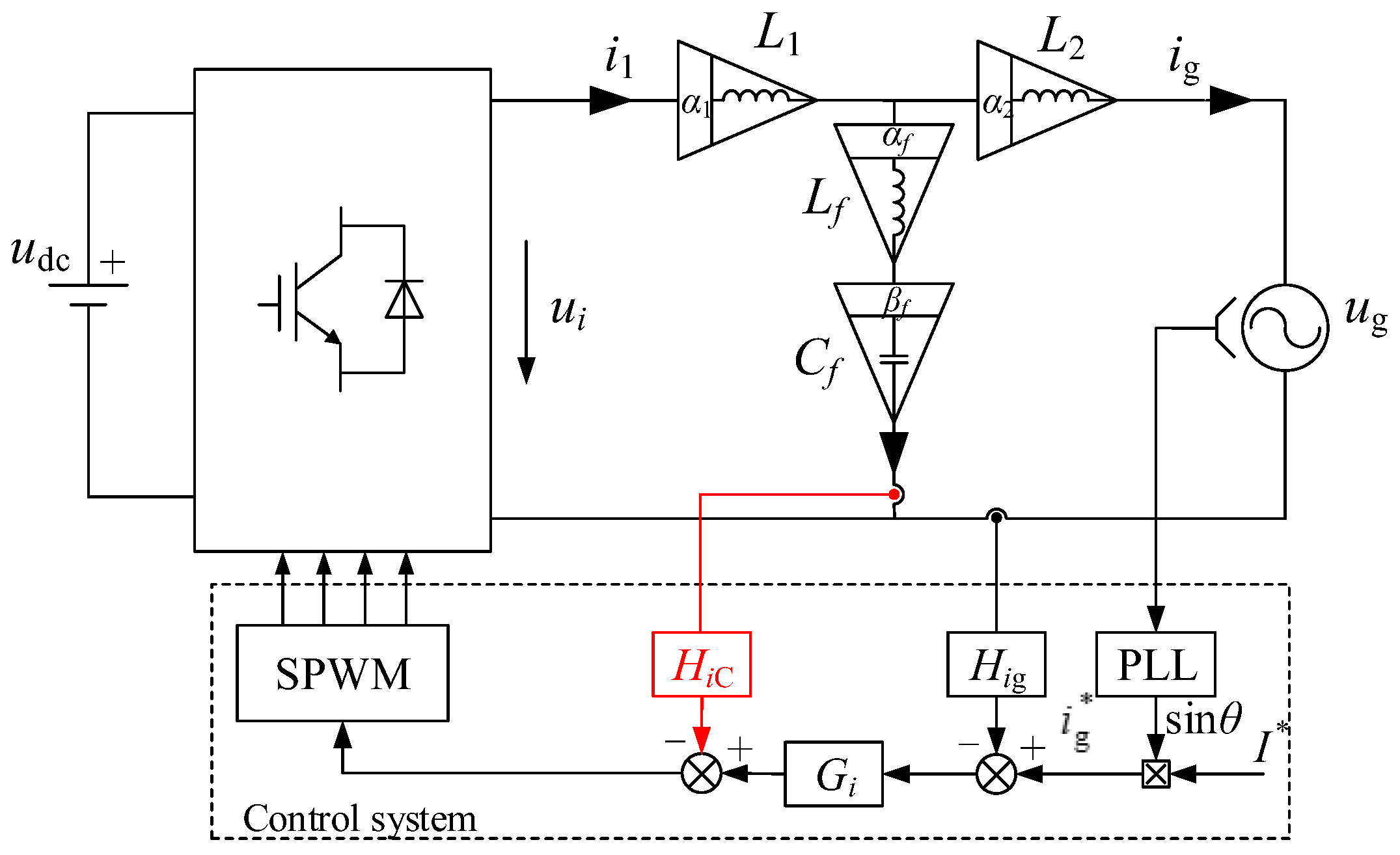
- The control system of the FOLLCL-type grid-tied inverter is given. Active damping can be avoided, thus improving the ease of control and saving the cost of the control system.
- The performances of the FOLLCL-type grid-tied inverter based on PI, PIλ, and PR control are analyzed through four cases. Among these three control methods, the most suitable one for the FOLLCL-type grid-tied inverter without an active damper is determined.
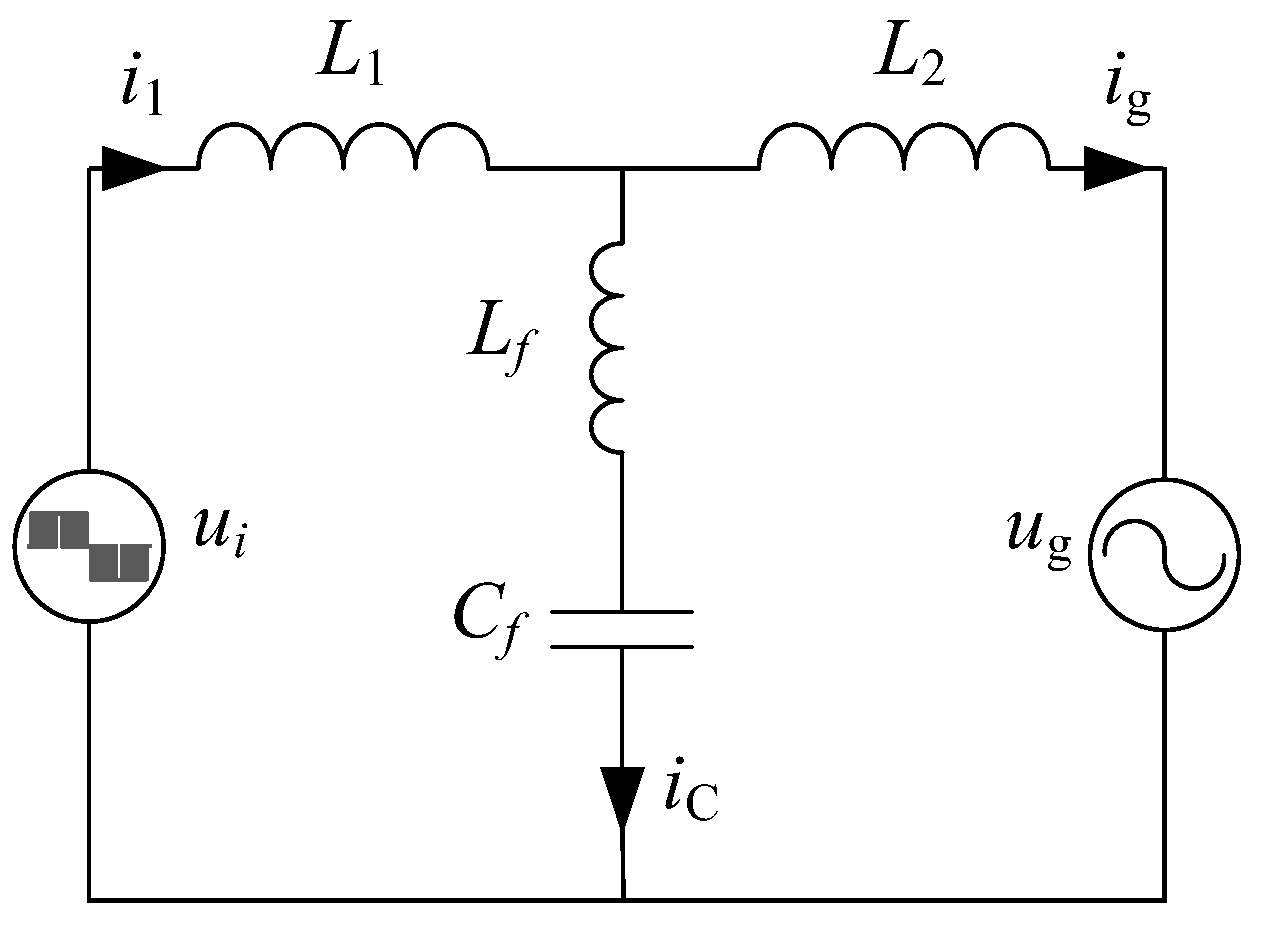
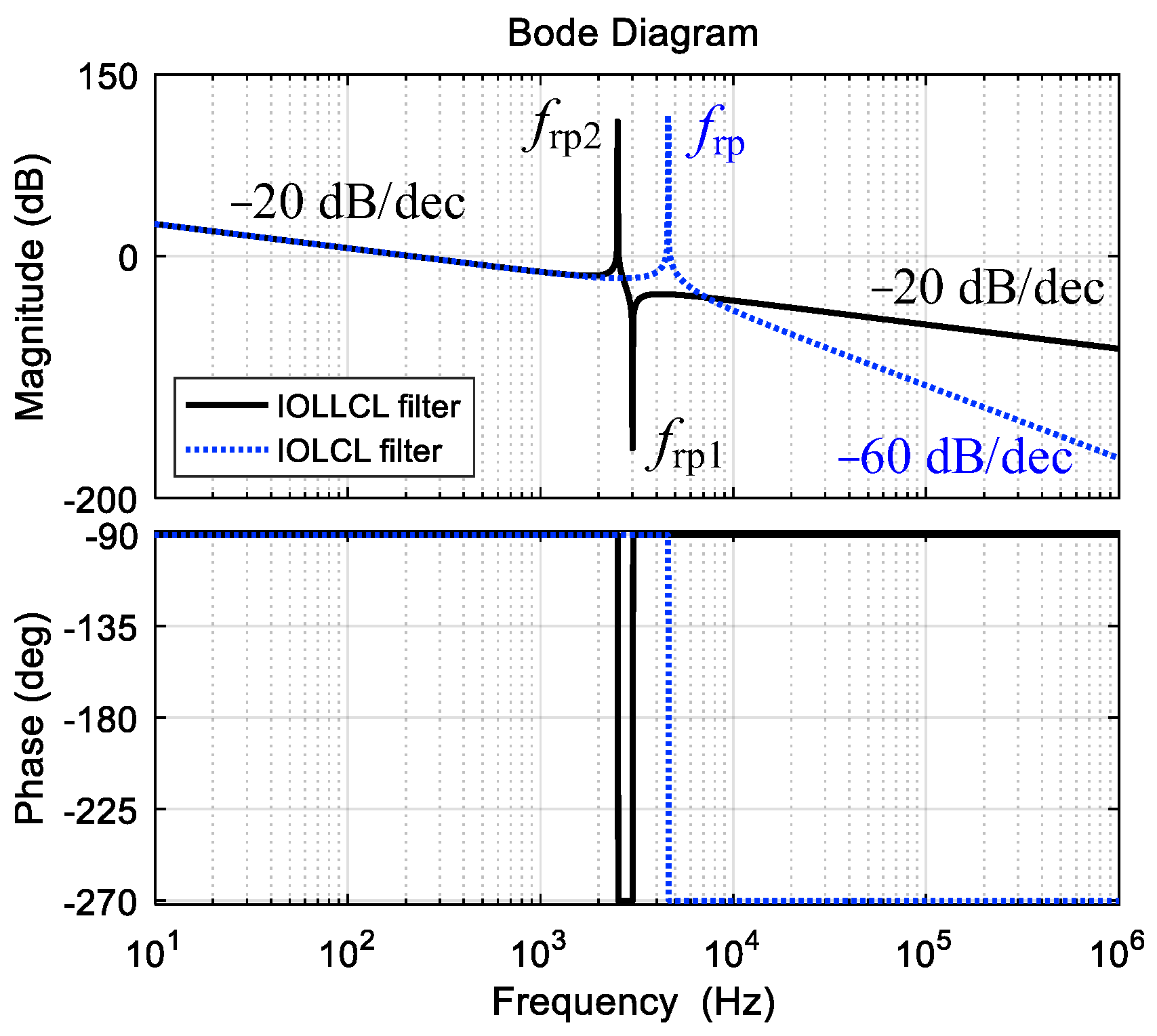
2. Integer-Order LLCL Filter
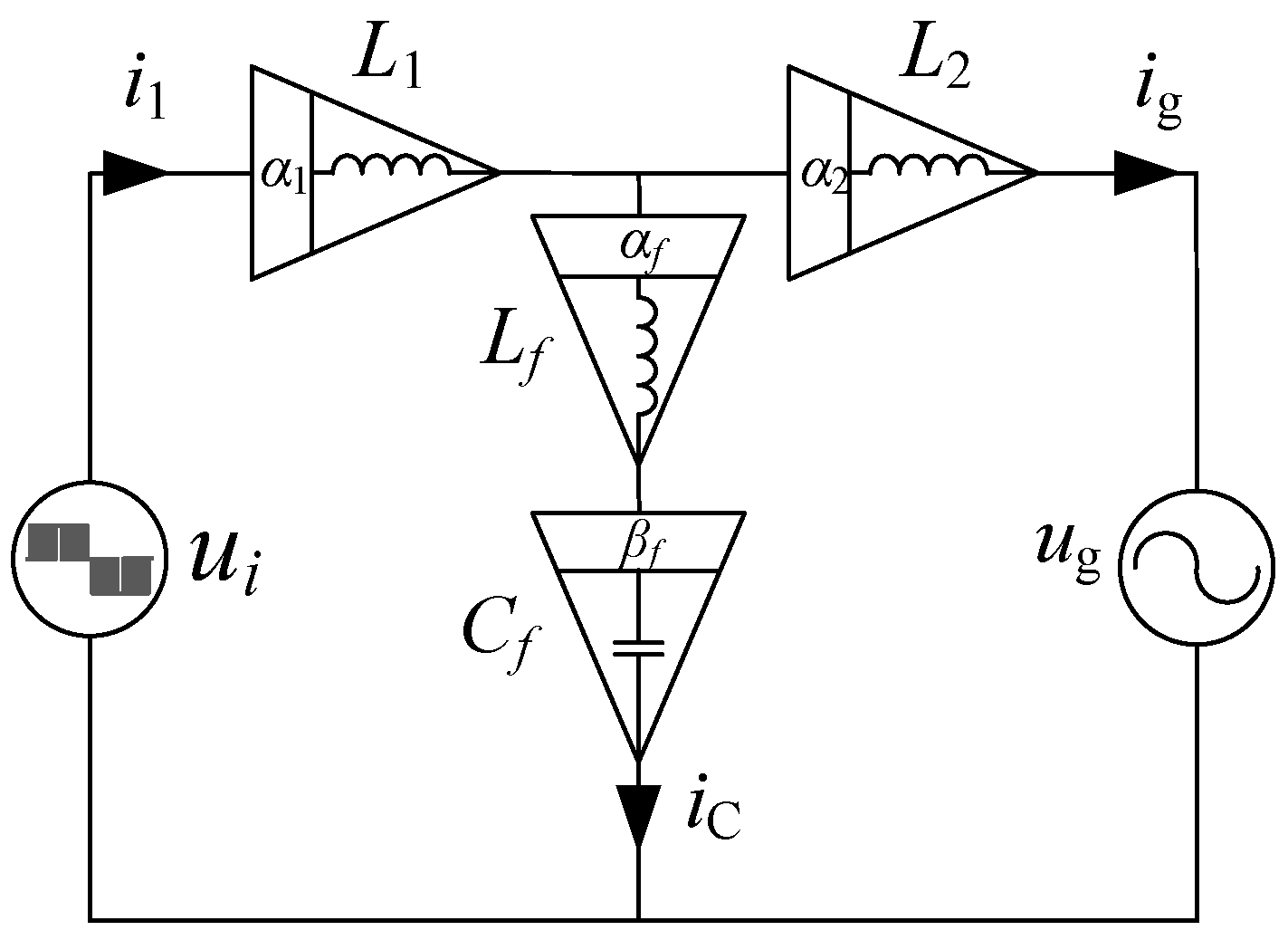
3. Fractional-Order LLCL Filter
3.1. Resonant Frequencies
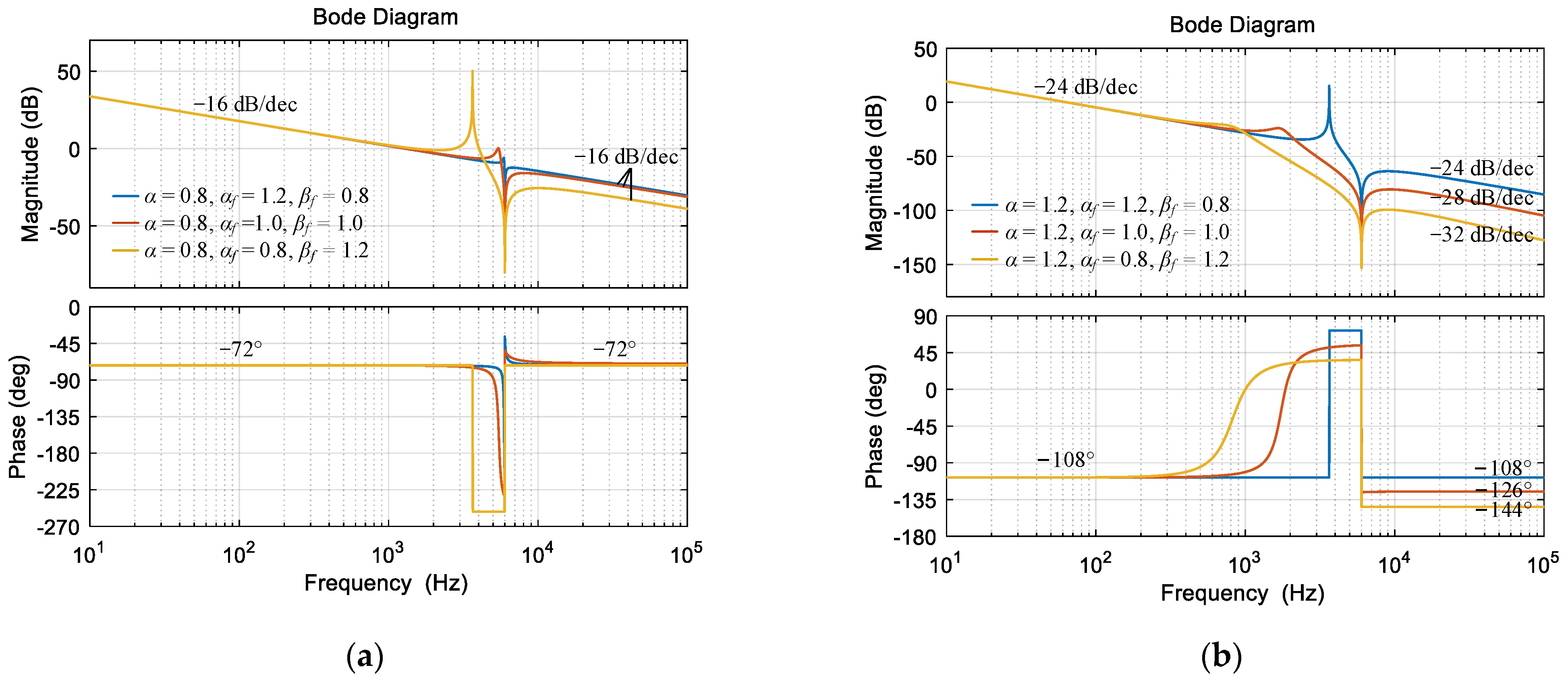
3.2. Magnitude–Frequency Characteristic
3.3. Phase–Frequency Characteristic
3.4. Simulation Analyses
4. Grid-Tied Inverter Based on Fractional-Order LLCL Filter
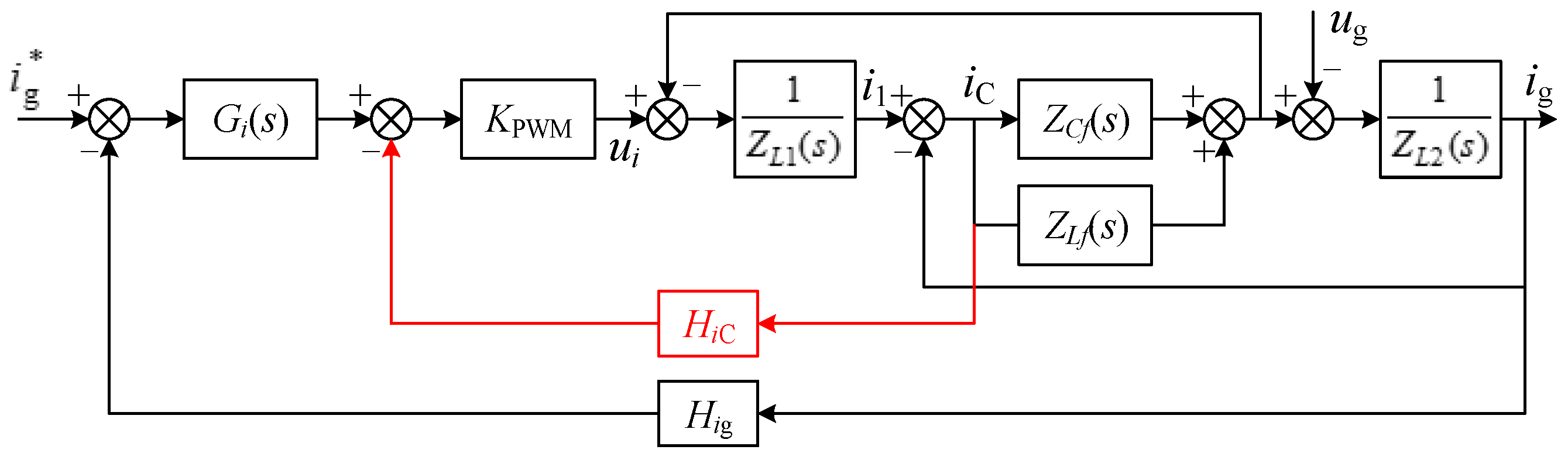
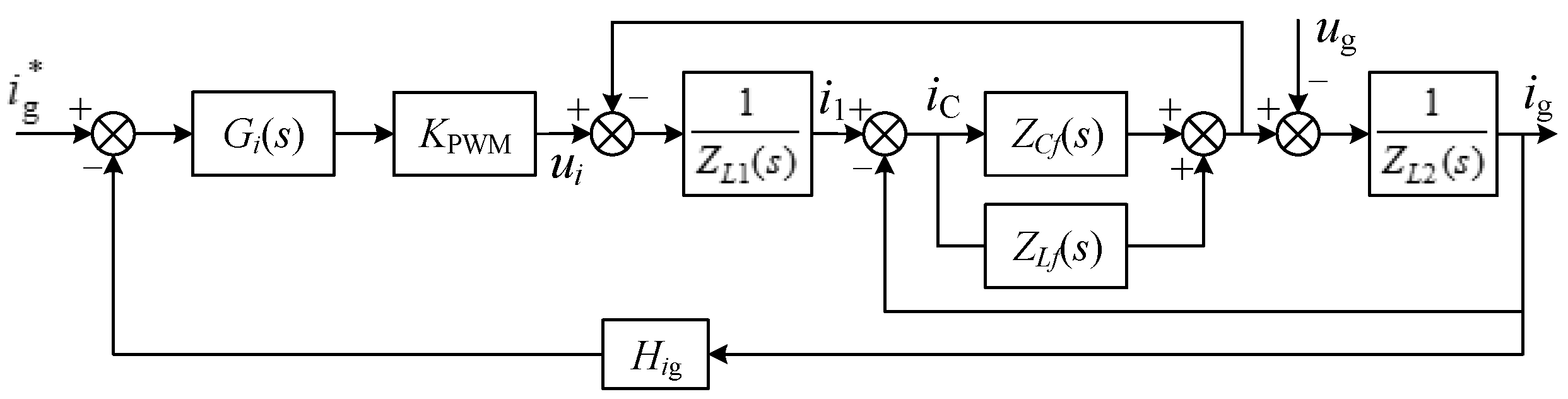
4.1. Structure of the Control System
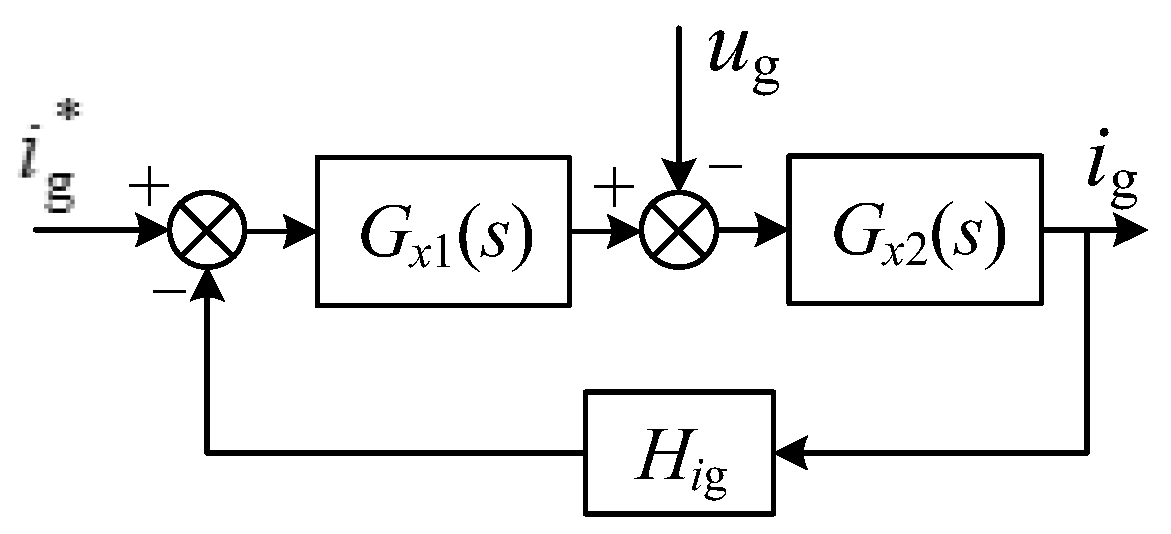
4.2. System Performance Analysis
- (1)
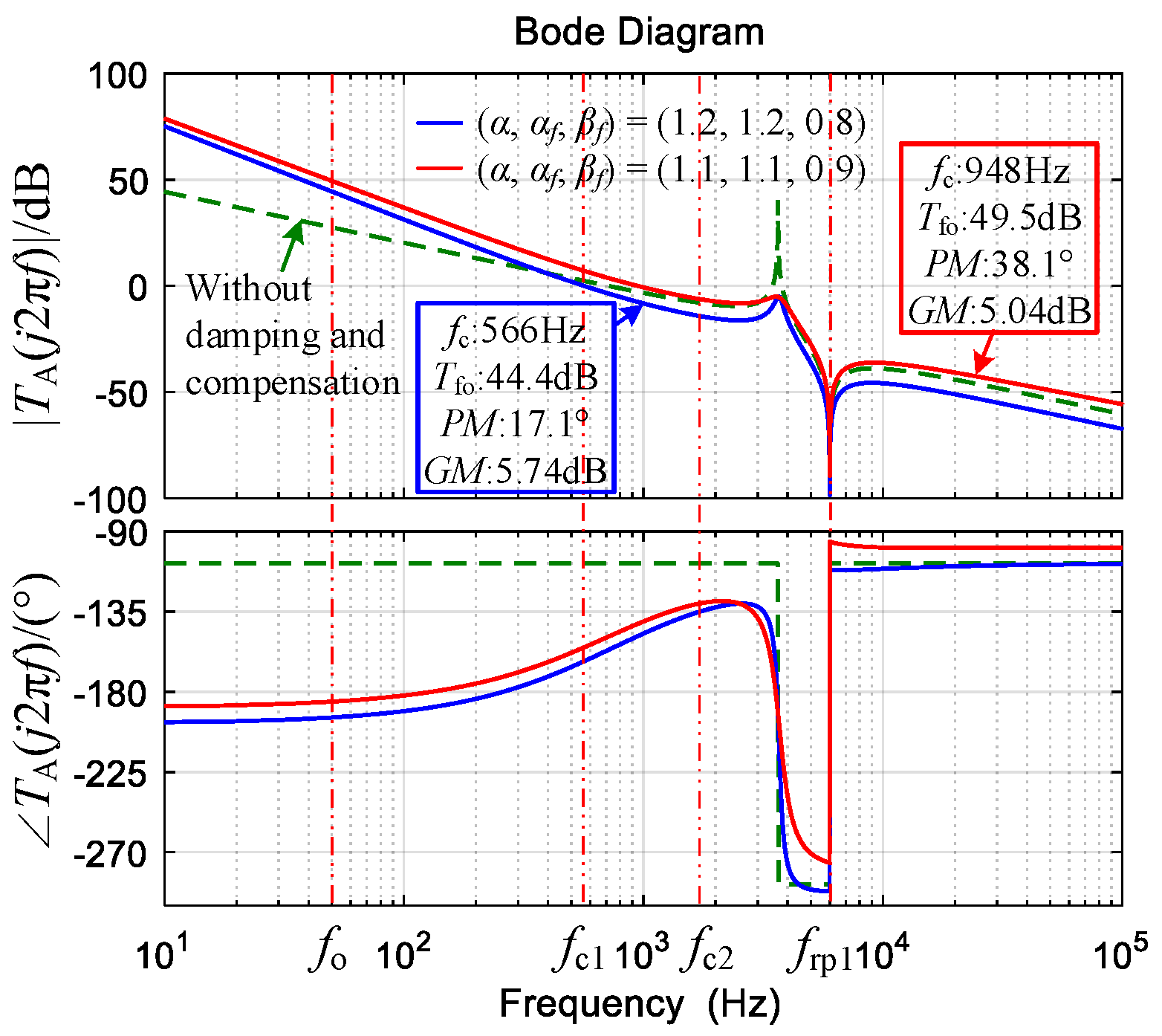
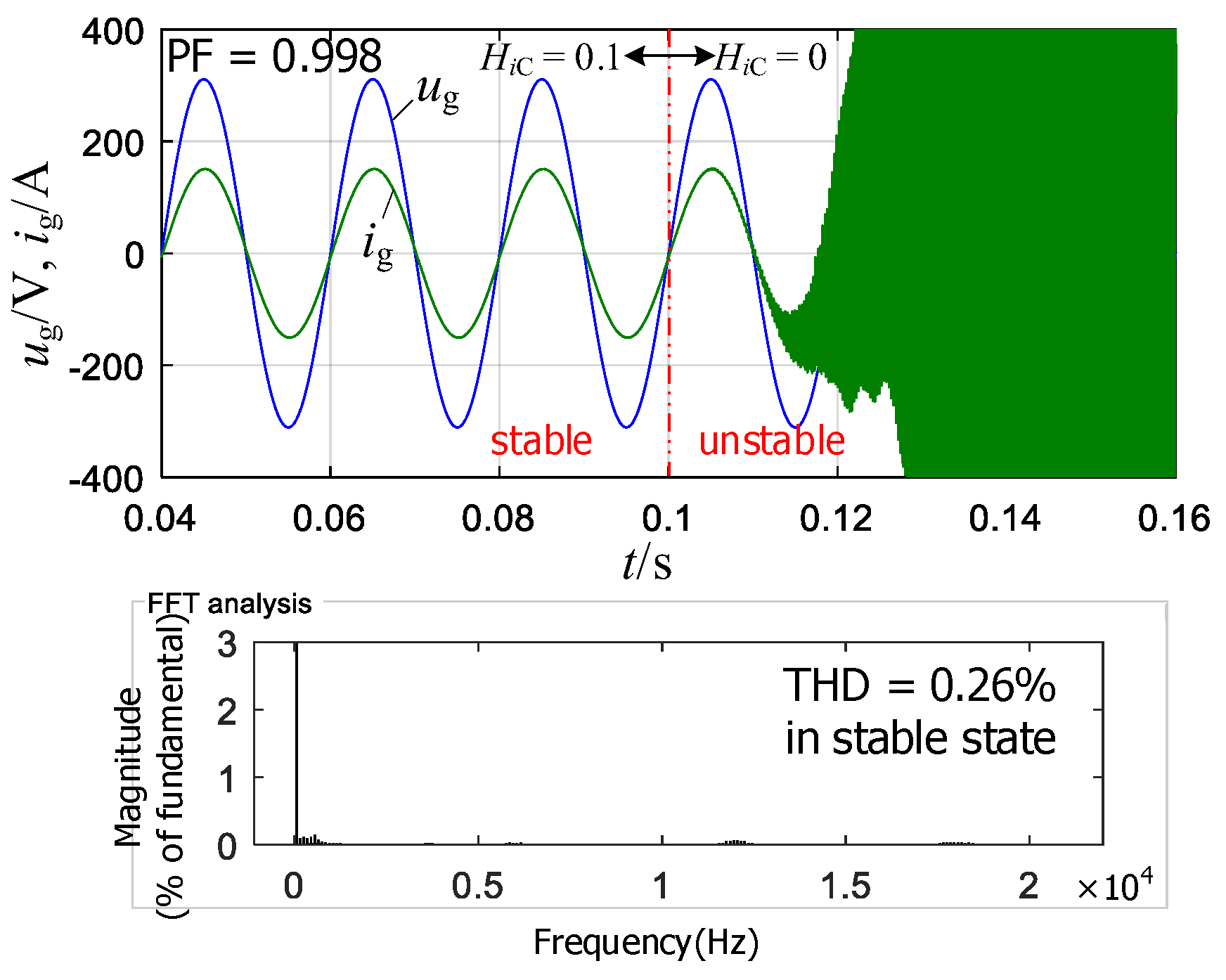
- If α + βf = 2, the FOLLCL-type grid-tied inverter can be damped by a capacitor current feedback loop. Under PI control, a lower α can achieve a larger PM but a higher fc.
- (2)
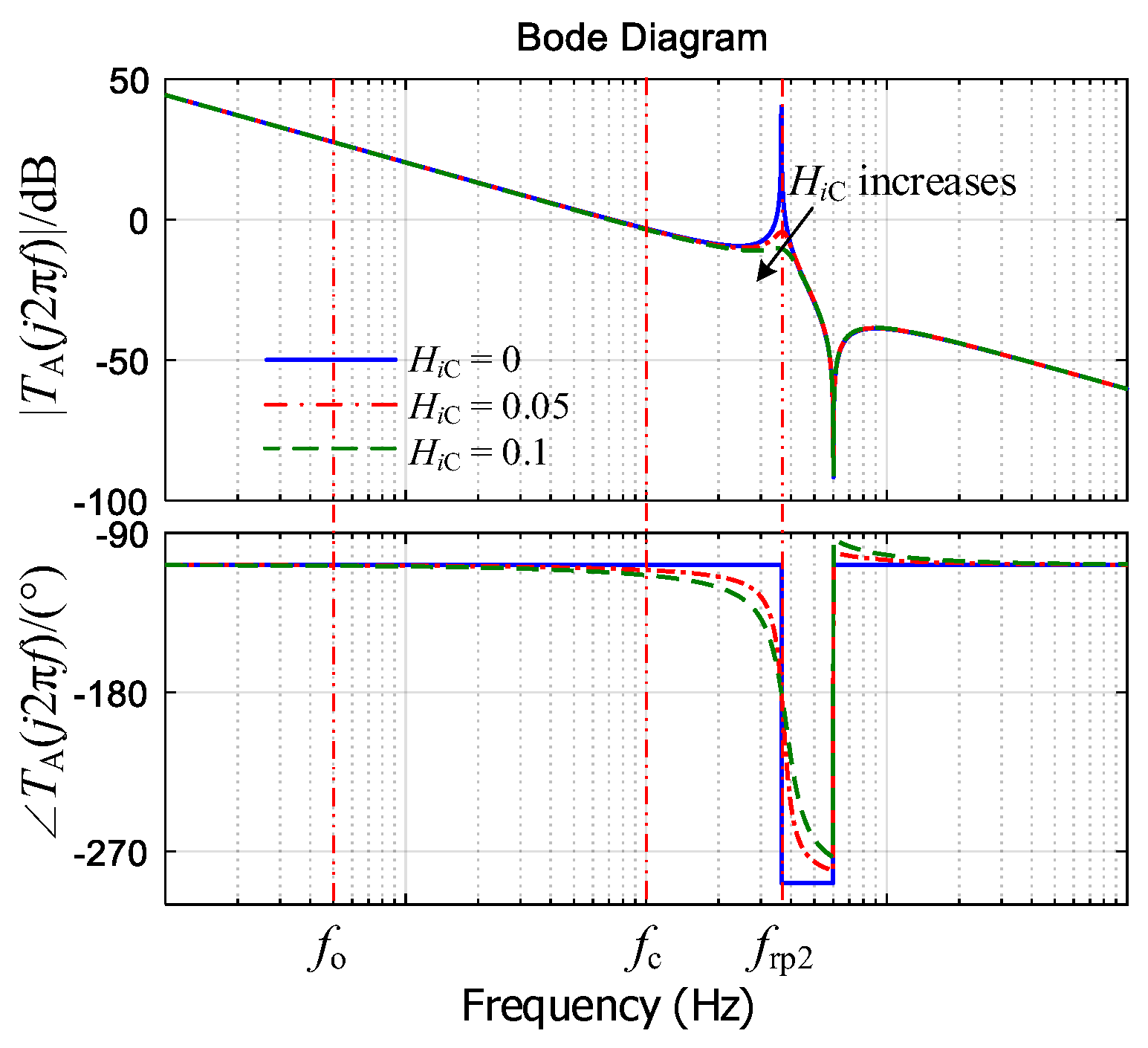
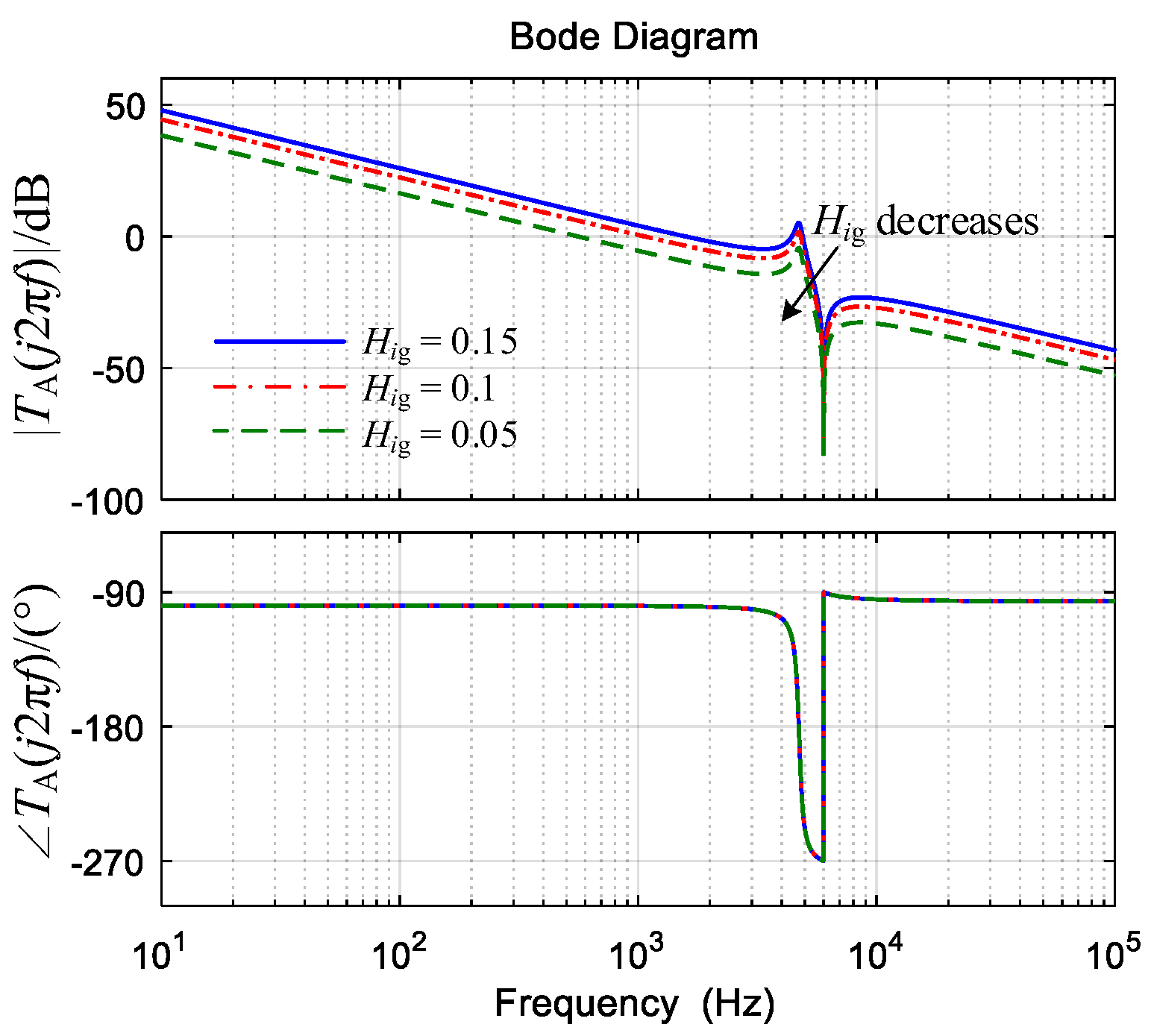
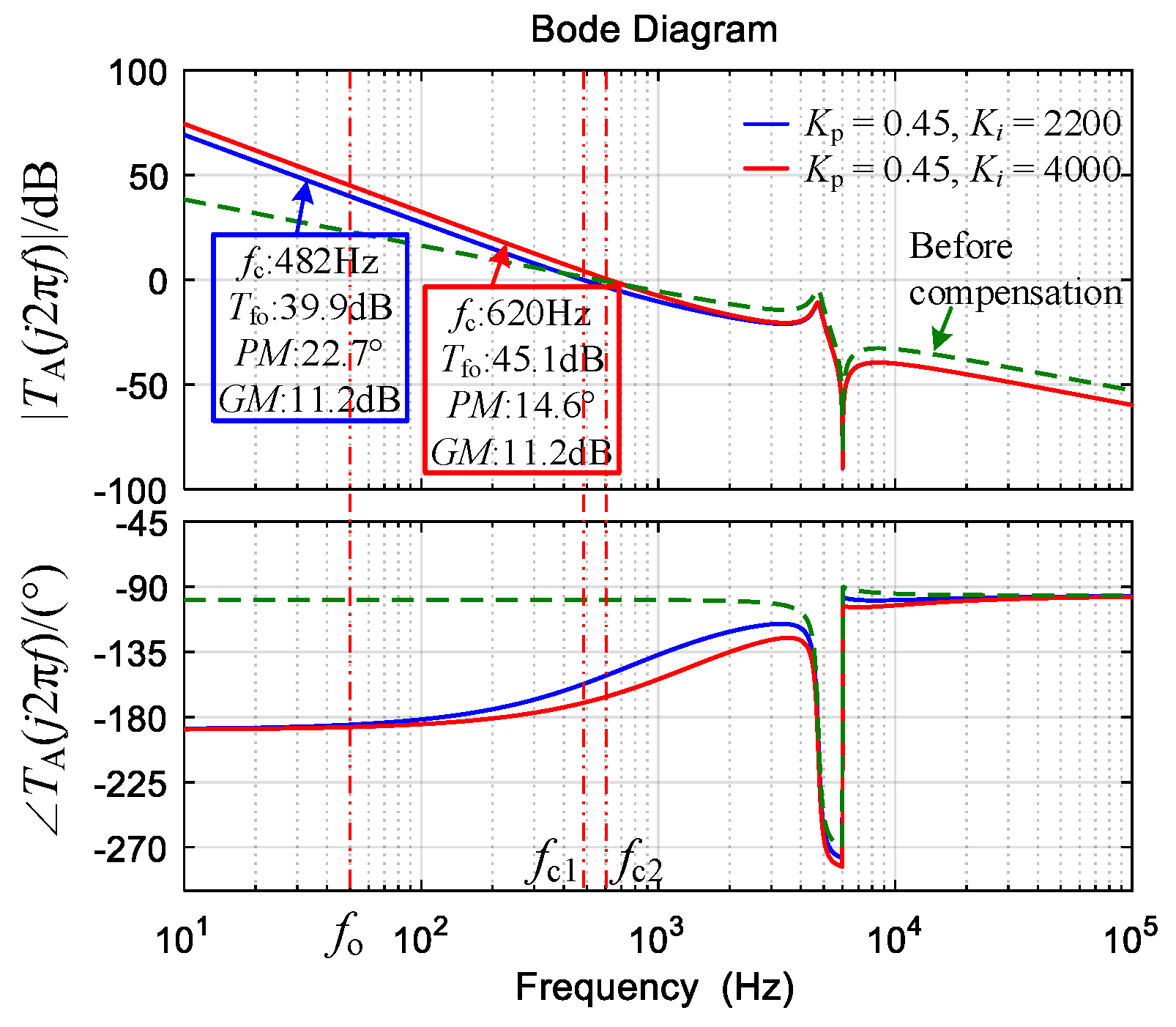
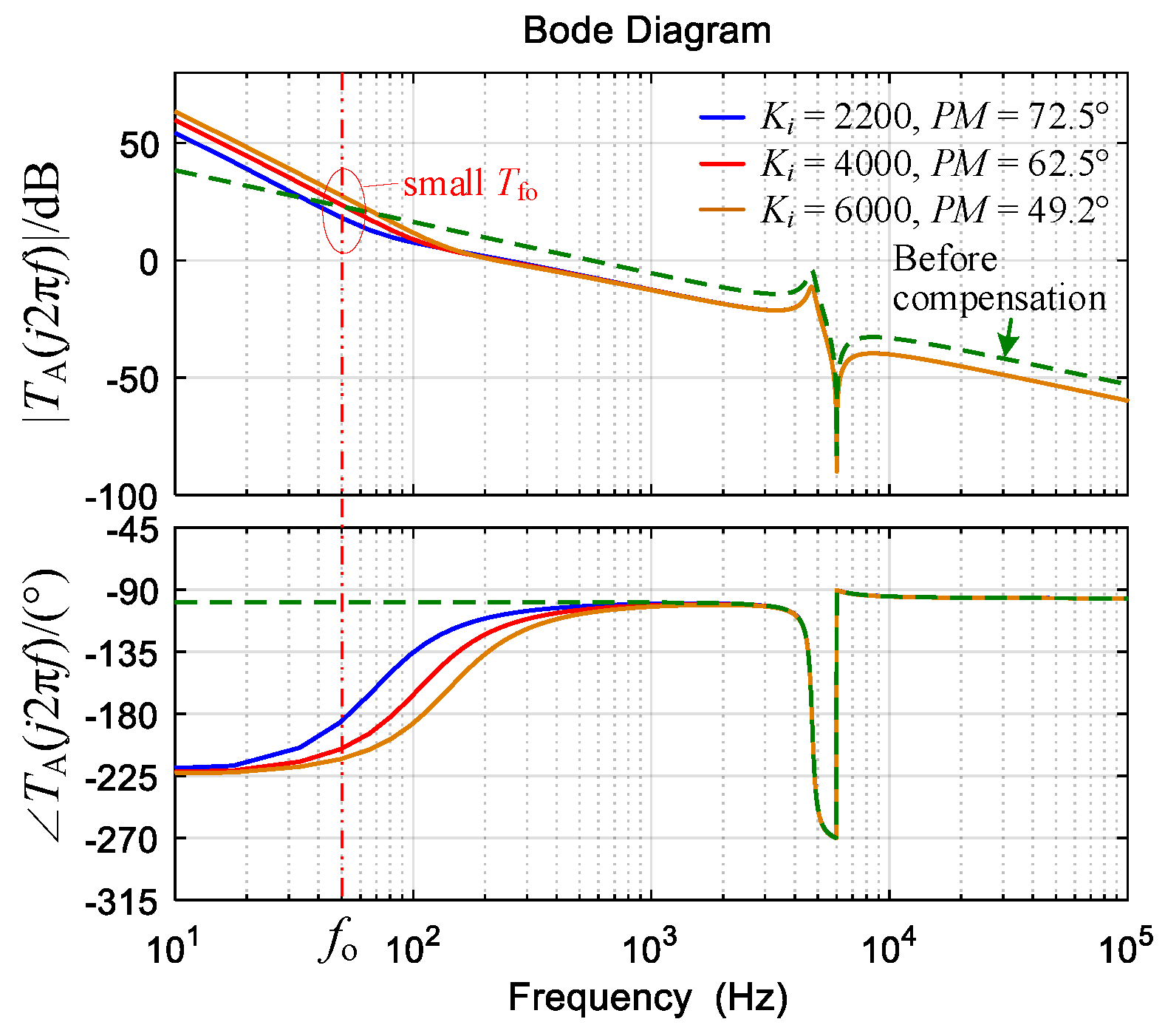
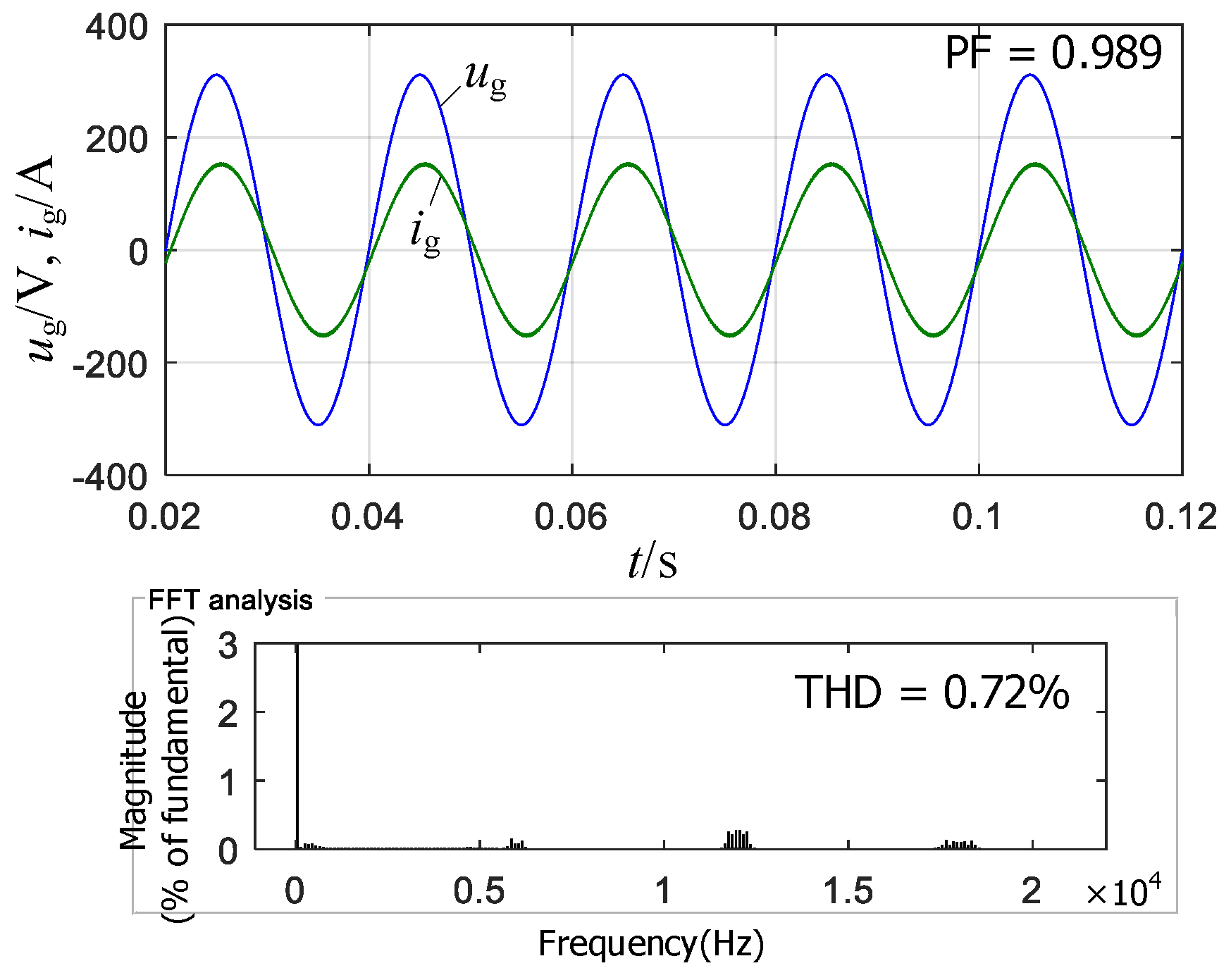
- If α + βf ≠ 2, the system is stable under the grid current feedback; the capacitor current feedback is avoided. Under PI control, a large Ki should be chosen to reduce the steady-state error of ig, but the PM decreases significantly.
- (3)
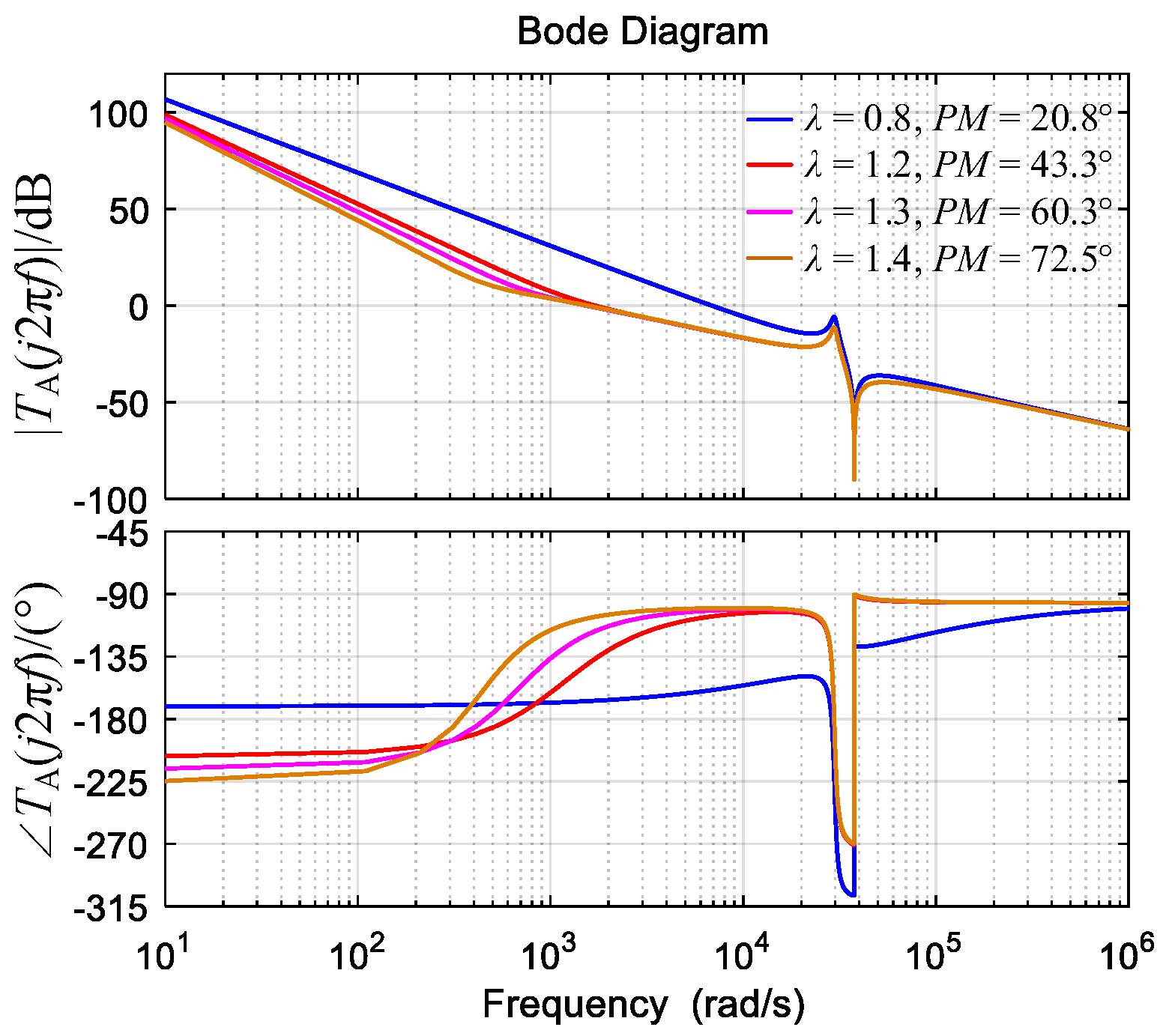
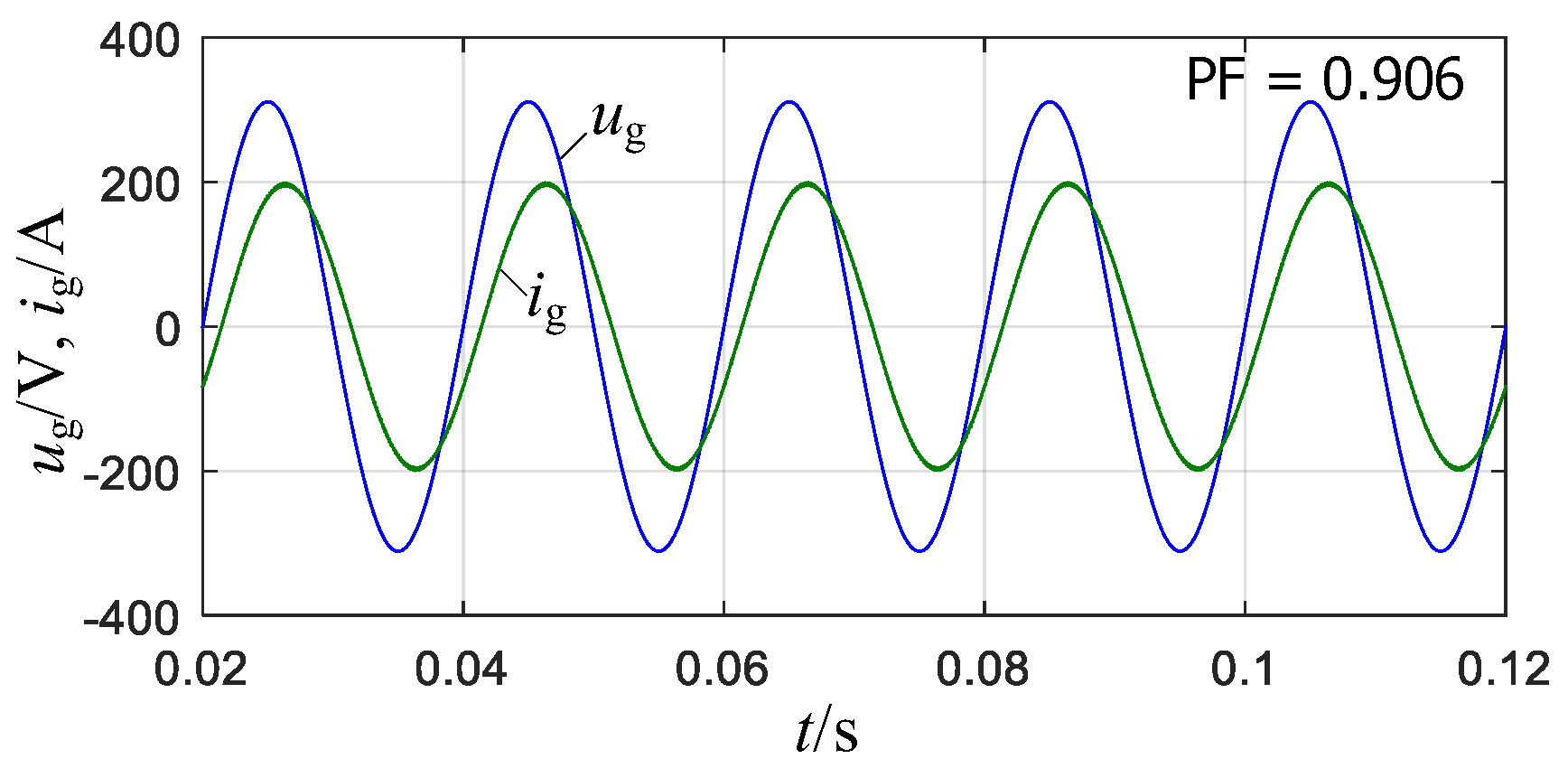
- A PIλ regulator can also make the system stable, but there is a contradiction between Tfo and PM.
- (4)
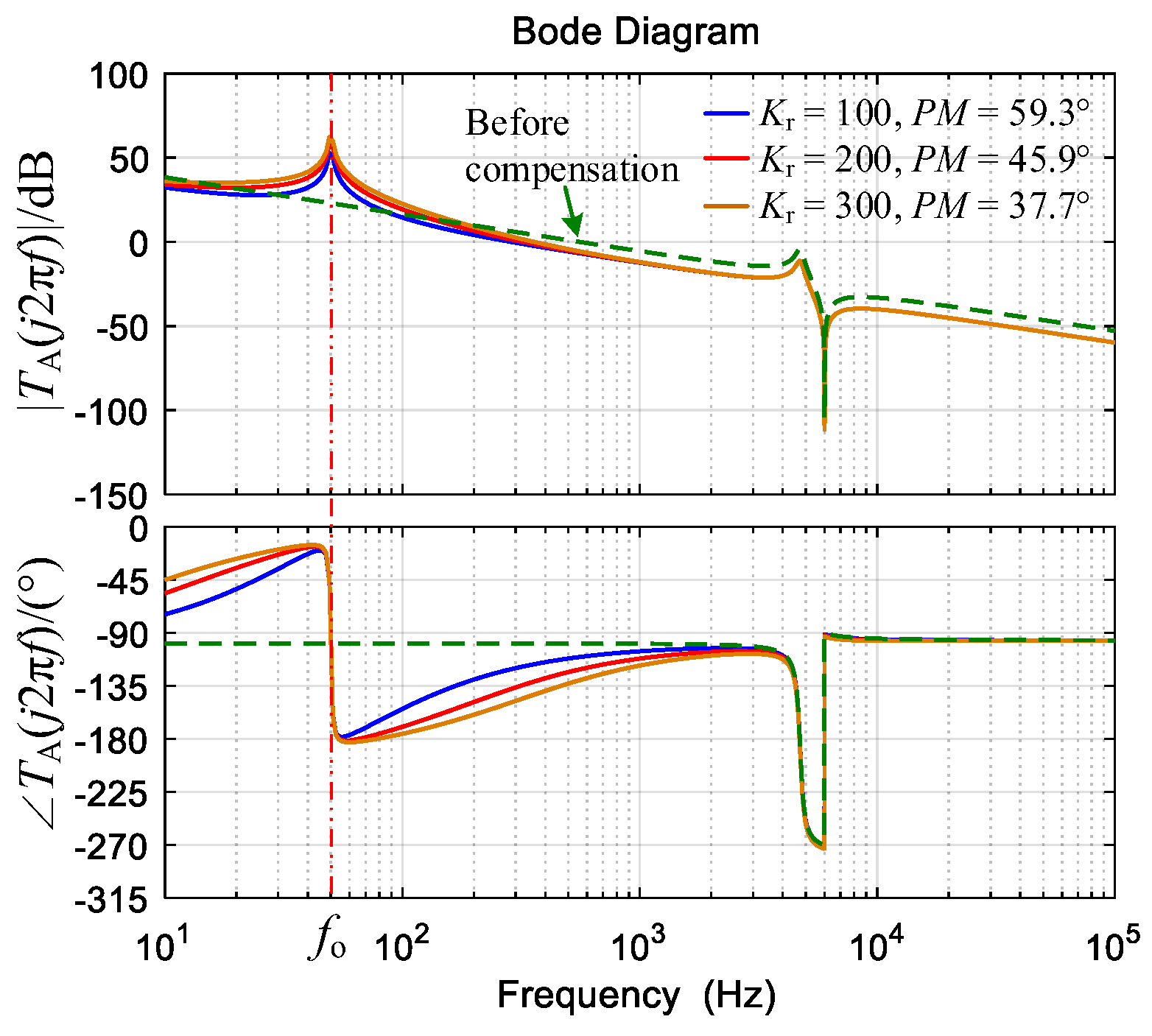
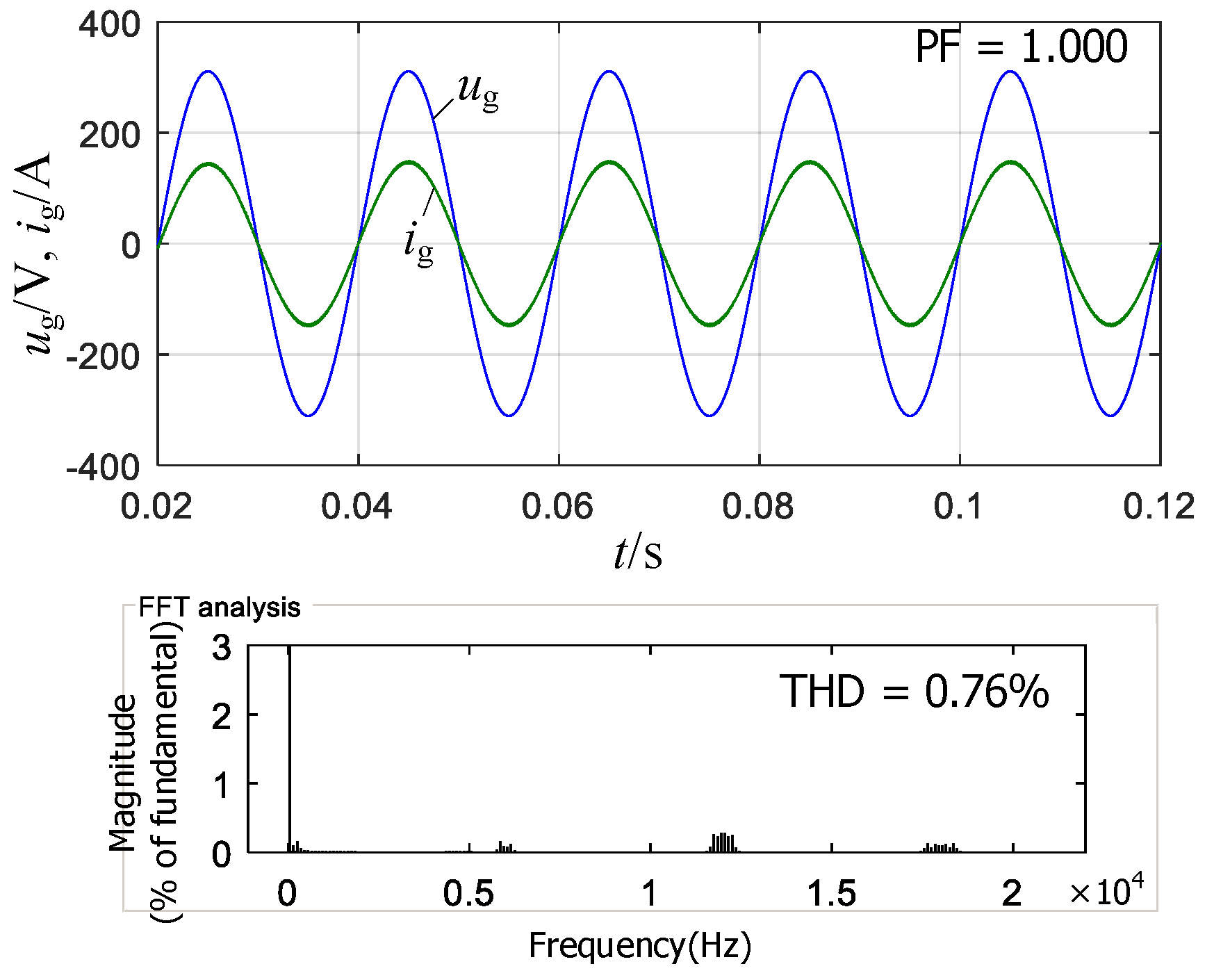
- A PR regulator can simultaneously obtain good Tfo, GM, PM, and fc, which is suitable for controlling the FOLLCL-type grid-tied inverter if α + βf ≠ 2.
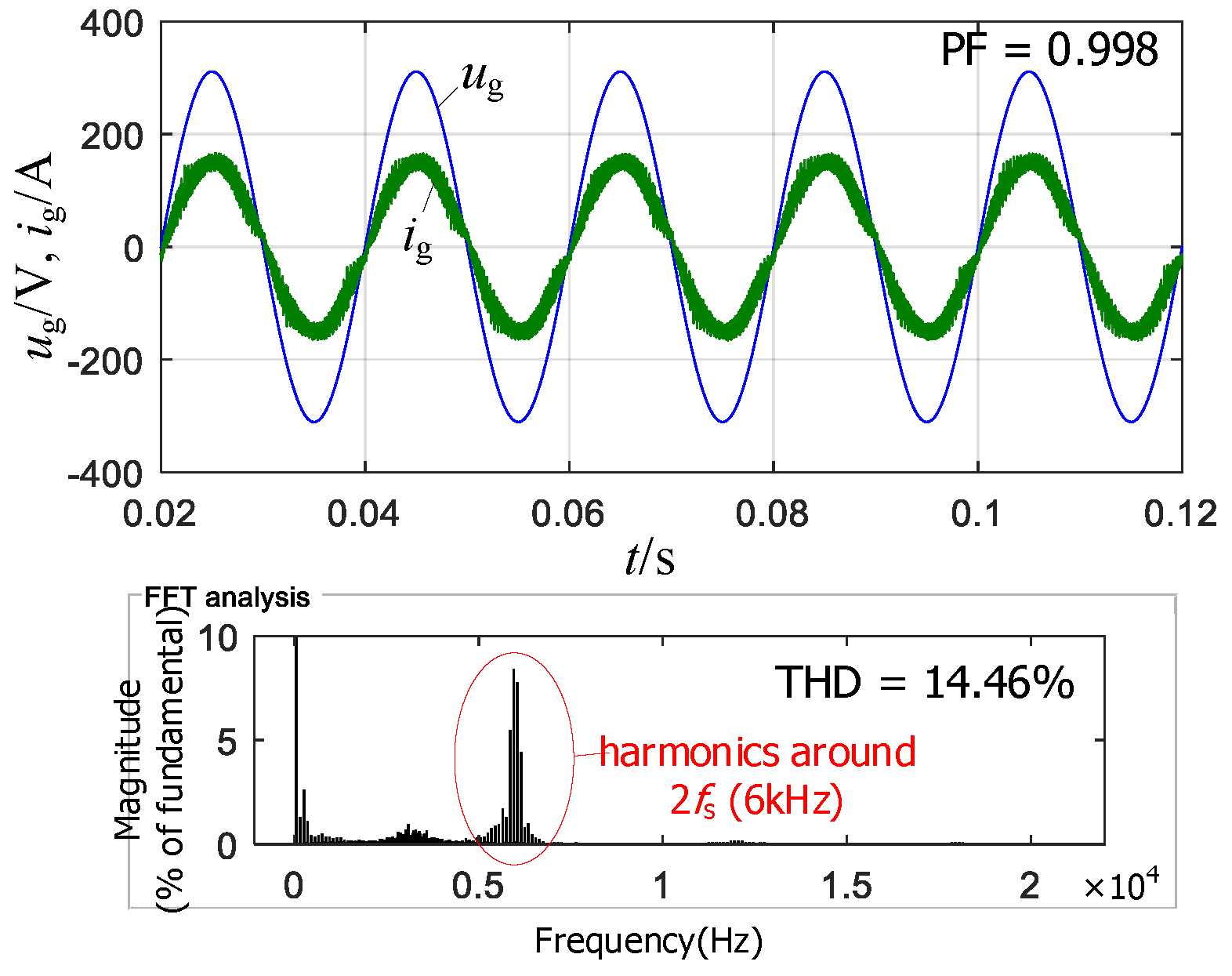
5. Simulations
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Twining, E.; Holmes, D.G. Grid current regulation of a three-phase voltage source inverter with an LCL input filter. IEEE Trans. Power Electron. 2003, 18, 888–895. [Google Scholar] [CrossRef]
- Pan, D.H.; Ruan, X.B.; Wang, X.H.; Yu, H.; Xing, Z.W. Analysis and design of current control schemes for LCL-type grid-connected inverter based on a general mathematical model. IEEE Trans. Power Electron. 2017, 32, 4395–4410. [Google Scholar] [CrossRef]
- Jayalath, S.; Hanif, M. Generalized LCL-filter design algorithm for grid-connected voltage-source inverter. IEEE Trans. Ind. Electron. 2017, 64, 1905–1915. [Google Scholar] [CrossRef]
- Wu, W.M.; Liu, Y.; He, Y.B.; Chung, H.S.H.; Liserre, M.; Blaabjerg, F. Damping methods for resonances caused by LCL-filter-based current-controlled grid-tied power inverters: An overview. IEEE Trans. Ind. Electron. 2017, 64, 7402–7413. [Google Scholar] [CrossRef]
- Wang, J.G.; Yan, J.D.; Jiang, L.; Zou, J.Y. Delay-dependent stability of single-loop controlled grid-connected inverters with LCL filters. IEEE Trans. Power Electron. 2016, 31, 743–757. [Google Scholar] [CrossRef]
- Wu, W.M.; He, Y.B.; Blaabjerg, F. An LLCL- power filter for single-phase grid-tied inverter. IEEE Trans. Power Electron. 2012, 27, 782–789. [Google Scholar] [CrossRef]
- Wu, W.M.; He, Y.B.; Tang, T.H.; Blaabjerg, F. A new design method for the passive damped LCL and LLCL filter-based single-phase grid-tied inverter. IEEE Trans. Ind. Electron. 2013, 60, 4339–4350. [Google Scholar] [CrossRef]
- Wu, W.M.; Sun, Y.J.; Huang, M.; Wang, X.F.; Wang, H.; Blaabjerg, F.; Liserre, M.; Chung, H.S.H. A robust passive damping method for LLCL-filter-based grid-tied inverters to minimize the effect of grid harmonic voltages. IEEE Trans. Power Electron. 2014, 29, 3279–3289. [Google Scholar] [CrossRef]
- Zhang, Z.H.; Wu, W.M.; Shuai, Z.K.; Wang, X.F.; Luo, A.; Chung, H.S.; Blaabjerg, F. Principle and robust impedance-based design of grid-tied inverter with LLCL-filter under wide variation of grid-reactance. IEEE Trans. Power Electron. 2019, 34, 4362–4374. [Google Scholar] [CrossRef]
- Liu, Y.T.; Jin, D.H.; Jiang, S.Q.; Liang, W.H.; Peng, J.C.; Lai, C.M. An active damping control method for the LLCL filter-based SiC MOSFET grid-connected inverter in vehicle-to-grid application. IEEE Trans. Veh. Technol. 2019, 68, 3411–3423. [Google Scholar] [CrossRef]
- Khan, A.; Gastli, A.; Ben-Brahi, L. Modeling and control for new LLCL filter based grid-tied PV inverters with active power decoupling and active resonance damping capabilities. Electr. Power Syst. Res. 2018, 155, 307–319. [Google Scholar] [CrossRef]
- Attia, H.A.; Freddy, T.K.S.; Che, H.S.; El Khateb, A.H. Design of LLCL filter for single phase inverters with confined band variable switching frequency (CB-VSF) PWM. J. Power Electron. 2019, 19, 44–57. [Google Scholar]
- Alemi, P.; Bae, C.; Lee, D. Resonance suppression based on PR control for single-phase grid-connected inverters with LLCL filters. IEEE Trans. Emerg. Sel. Topics Power Electron. 2016, 4, 459–467. [Google Scholar] [CrossRef]
- Liu, Z.F.; Wu, H.Y.; Liu, Y.; Ji, J.H.; Wu, W.M.; Blaabjerg, F. Modelling of the modified-LLCL-filter-based single-phase grid-tied Aalborg inverter. IET Power Electron. 2017, 10, 151–1515. [Google Scholar] [CrossRef]
- Miao, Z.Y.; Yao, W.X.; Lu, Z.Y. Single-cycle-lag compensator-based active damping for digitally controlled LCL/LLCL-type grid-connected inverters. IEEE Trans. Ind. Electron. 2020, 63, 1980–1990. [Google Scholar] [CrossRef]
- Wang, F.Q.; Ma, X.K. Modeling and analysis of the fractional order Buck converter in DCM operation by using fractional calculus and the circuit-averaging technique. J. Power Electron. 2013, 13, 1008–1015. [Google Scholar] [CrossRef]
- Jia, Z.R.; Liu, C.X. Fractional-order modeling and simulation of magnetic coupled boost converter in continuous conduction mode. Int. J. Bifurc. Chaos 2018, 28, 1850061. [Google Scholar] [CrossRef]
- Yang, R.C.; Liao, X.Z.; Lin, D.; Dong, L. Modeling and analysis of fractional order Buck converter using Caputo–Fabrizio derivative. Energy Rep. 2020, 6, 440–445. [Google Scholar] [CrossRef]
- Wei, Z.H.; Zhang, B.; Jiang, Y.W. Analysis and modeling of fractional-order buck converter based on Riemann-Liouville derivative. IEEE Access 2019, 7, 162768–162777. [Google Scholar] [CrossRef]
- Xie, L.L.; Liu, Z.P.; Zhang, B. A modeling and analysis method for CCM fractional order Buck-boost converter by using R–L fractional definition. J. Electr. Eng. Technol. 2020, 15, 1651–1661. [Google Scholar] [CrossRef]
- Chen, X.; Chen, Y.F.; Zhang, B.; Qiu, D.Y. A modeling and analysis method for fractional-order DC–DC converters. IEEE Trans. Power Electron. 2017, 32, 7034–7044. [Google Scholar] [CrossRef]
- Radwan, A.G.; Emira, A.A.; AbdelAty, A.M.; Azar, A.T. Modeling and analysis of fractional order DC-DC converter. ISA Trans. 2018, 82, 184–199. [Google Scholar] [CrossRef] [PubMed]
- Sharma, M.; Rajpurohit, B.S.; Agnihotri, S.; Rathore, A.K. Development of fractional order modeling of voltage source converters. IEEE Access 2020, 8, 131750–131759. [Google Scholar] [CrossRef]
- Xu, J.H.; Li, X.C.; Liu, H.; Meng, X.R. Fractional-order modeling and analysis of a three-phase voltage source PWM rectifier. IEEE Access 2020, 8, 13507–13515. [Google Scholar] [CrossRef]
- El-Khazali, R. Fractional-order LCαL filter-based grid connected PV systems. In 2019 IEEE 62nd International Midwest Symposium On Circuits And Systems (MWSCAS); IEEE: New York, NY, USA, 2019; pp. 533–536. [Google Scholar]
- Seo, S.W.; Choi, H.H. Digital implementation of fractional order PID-type controller for boost DC–DC converter. IEEE Access 2019, 7, 142652–142662. [Google Scholar] [CrossRef]
- Soriano-Sánchez, A.G.; Rodríguez-Licea, M.A.; Pérez-Pinal, F.J.; Vázquez-López, J.A. Fractional-order approximation and synthesis of a PID controller for a Buck converter. Energies 2020, 13, 629. [Google Scholar] [CrossRef]
- Xie, L.L.; Liu, Z.P.; Ning, K.Z.; Qin, R. Fractional-order adaptive sliding mode control for fractional-order Buck-boost converters. J. Electr. Eng. Technol. 2022, 17, 1693–1704. [Google Scholar] [CrossRef]
- Azghandi, M.A.; Barakati, S.M.; Yazdani, A. Impedance-based stability analysis and design of a fractional-order active damper for grid-connected current-source inverters. IEEE Trans. Sustain. Energy 2021, 12, 599–611. [Google Scholar] [CrossRef]
- Wang, Q.Y.; Ju, B.L.; Zhang, Y.Q.; Zhou, D.; Wang, N.; Wu, G.P. Design and implementation of an LCL grid-connected inverter based on capacitive current fractional proportional–integral feedback strategy. IET Control Theory Appl. 2020, 14, 2889–2898. [Google Scholar] [CrossRef]
- Wang, X.G.; Cai, J.H. Grid-connected inverter based on a resonance-free fractional-order LCL filter. Fractal Fract. 2022, 6, 374. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Symbol | Value |
|---|---|---|
| inverter-side inductor | L1 | 600 μH |
| grid-side inductor | L2 | 150 μH |
| series resonant circuit inductor | Lf | 70.362 μH |
| series resonant circuit capacitor | Cf | 10 μF |
| Parameter | Symbol | Value |
|---|---|---|
| DC voltage | udc | 360 V |
| grid voltage (RMS) | Ug | 220 V |
| fundamental frequency | fo | 50 Hz |
| switching frequency | fs | 3 kHz |
| amplitude of the triangular carrier | Vtri | 3.05 V |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, X.; Zhuang, R.; Cai, J. Theoretical Analysis of a Fractional-Order LLCL Filter for Grid-Tied Inverters. Fractal Fract. 2023, 7, 135. https://doi.org/10.3390/fractalfract7020135
Wang X, Zhuang R, Cai J. Theoretical Analysis of a Fractional-Order LLCL Filter for Grid-Tied Inverters. Fractal and Fractional. 2023; 7(2):135. https://doi.org/10.3390/fractalfract7020135
Chicago/Turabian StyleWang, Xiaogang, Ruidong Zhuang, and Junhui Cai. 2023. "Theoretical Analysis of a Fractional-Order LLCL Filter for Grid-Tied Inverters" Fractal and Fractional 7, no. 2: 135. https://doi.org/10.3390/fractalfract7020135
APA StyleWang, X., Zhuang, R., & Cai, J. (2023). Theoretical Analysis of a Fractional-Order LLCL Filter for Grid-Tied Inverters. Fractal and Fractional, 7(2), 135. https://doi.org/10.3390/fractalfract7020135