Joint Divergence Angle of Free Space Optics (FSO) Link and UAV Trajectory Design in FSO-Based UAV-Enabled Wireless Power Transfer Relay Systems


Abstract
1. Introduction
- We formulate the problem of jointly optimizing the divergence angle and UAV trajectory to maximize the minimum harvested power among all devices to ensure fairness in FSO-based UAV-enabled WPT systems.
- To address the non-convex and highly non-linear problem, we develop a Particle Swarm Optimization (PSO)-based method to solve the problem. By leveraging the analysis on the optimal condition for the divergence angle, we further devise a hybrid BS-PSO-based method to enhance optimization performance.
- Our numerical results show that the proposed joint design substantially increases the minimum harvested power, as well as having the benefit of improving optimization capability in terms of the execution time compared to the conventional algorithm.
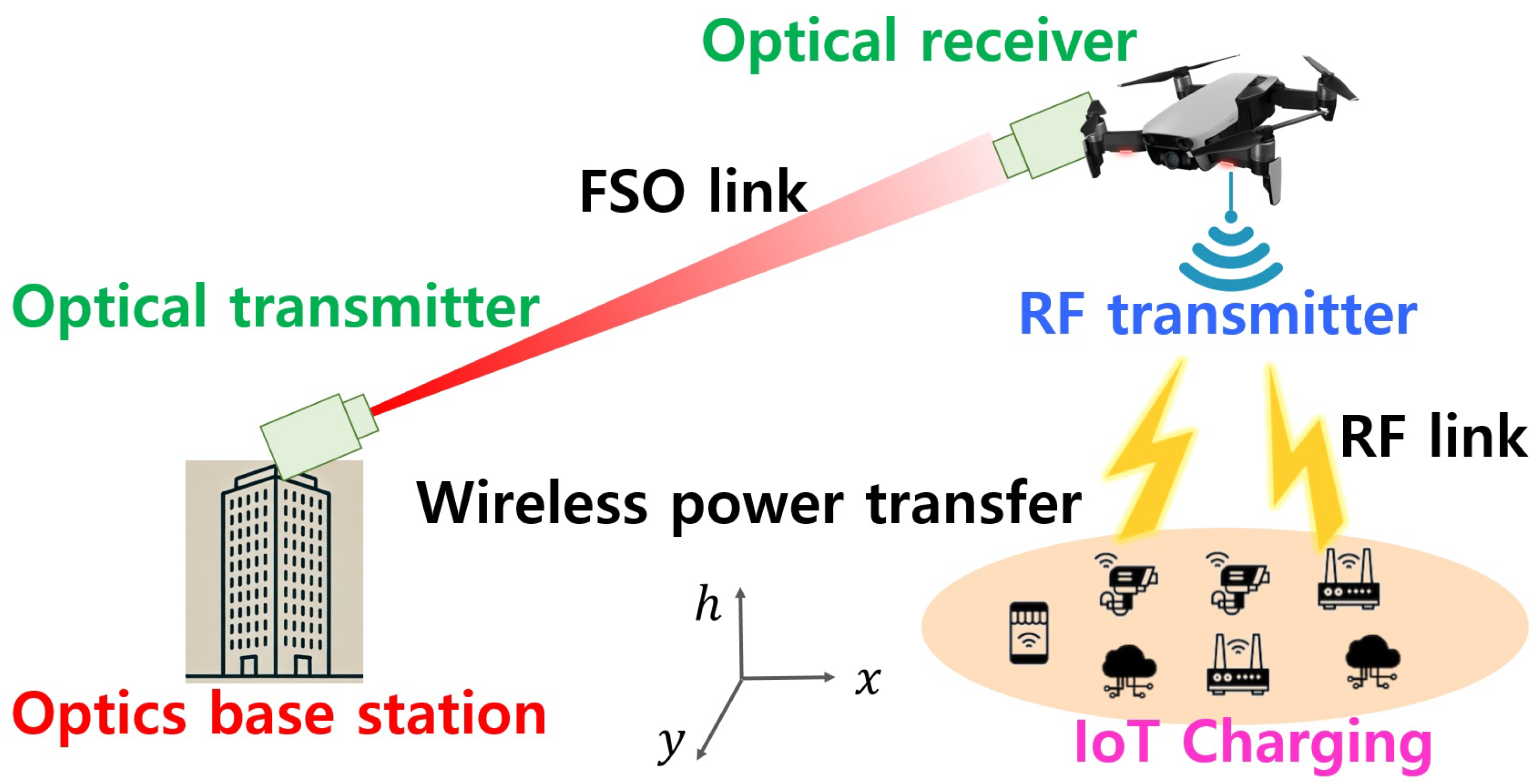
2. System Model
2.1. FSO Link Model Between the OBS and the UAV
2.2. RF Link Model Between the UAV and the EHDs
3. Problem Formulation
4. Joint Design of Divergence Angle of FSO Link and UAV Trajectory
4.1. Preliminary on Particle Swarm Optimization (PSO)
4.2. Joint Design Based on the PSO Method
| Algorithm 1 Algorithm of the PSO-based optimization. |
|
4.3. Proposed Hybrid BS-PSO Method for Joint Design
| Algorithm 2 Algorithm of the hybrid BS-PSO-based optimization. |
|
| Algorithm 3 The Bisection line-search method to find . |
|
5. Numerical Results
5.1. Performance Evaluation in a Single-EHD Scenario
5.2. Performance Evaluation in a Multiple-EHD Scenario
- Reference Method-1: and .
- Reference Method-2: and .
- Reference Method-3: and .
- Reference Method-4: and .
- Proposed Method-1: Obtained from Algorithm 1.
- Proposed Method-2: Obtained from Algorithm 2.
- Optimal Method: Optimal UAV trajectory and divergence angle obtained by 3-D exhaustive line-search method with BS line-search method.
5.2.1. Performance Evaluation by Varying the Variance in the Radial Displacement
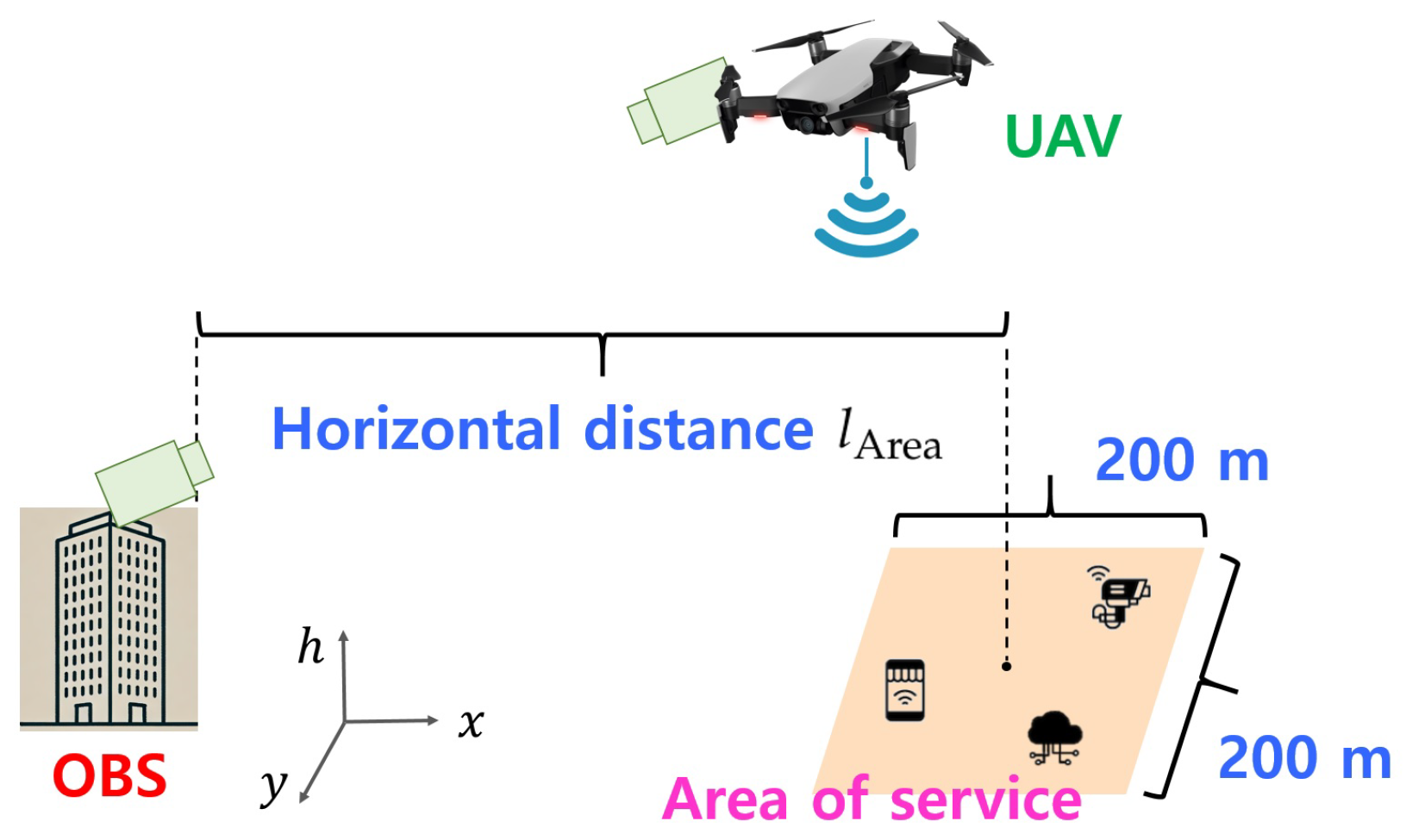
5.2.2. Performance Evaluation by Varying the Horizontal Distance from the Center
6. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kang, J.; Choi, J.; Choi, W. Multi-User Energy Beamforming for Different Energy Requests. IEEE Wirel. Commun. Lett. 2021, 10, 1687–1691. [Google Scholar] [CrossRef]
- Xie, L.; Cao, X.; Xu, J.; Zhang, R. UAV-Enabled Wireless Power Transfer: A Tutorial Overview. IEEE Trans. Green Commun. Net. 2021, 62, 2042–2064. [Google Scholar] [CrossRef]
- Che, Y.; Zhao, Z.; Luo, S.; Wu, K.; Duan, L.; Leung, V.C.M. UAV-Aided Wireless Energy Transfer for Sustaining Internet of Everything in 6G. Drones 2023, 7, 628. [Google Scholar] [CrossRef]
- Xu, J.; Zeng, Y.; Zhang, R. UAV-Enabled Wireless Power Transfer: Trajectory Design and Energy Optimization. IEEE Trans. Wirel. Commun. 2018, 17, 5092–5106. [Google Scholar] [CrossRef]
- Hu, Y.; Yuan, X.; Xu, J.; Schmeink, A. Optimal 1D Trajectory Design for UAV-Enabled Multiuser Wireless Power Transfer. IEEE Trans. Commun. 2019, 67, 5674–5688. [Google Scholar] [CrossRef]
- Yuan, X.; Yang, T.; Hu, Y.; Xu, J.; Schmeink, A. Trajectory Design for UAV-Enabled Multiuser Wireless Power Transfer with Nonlinear Energy Harvesting. IEEE Trans. Wirel. Commun. 2021, 20, 1105–1121. [Google Scholar] [CrossRef]
- Gou, X.; Sun, Z.; Huang, L. UAV-Aided Dual-User Wireless Power Transfer: 3D Trajectory Design and Energy Optimization. Sensors 2023, 23, 2994. [Google Scholar] [CrossRef]
- Yuan, X.; Hu, Y.; Schmeink, A. Joint Design of UAV Trajectory and Directional Antenna Orientation in UAV-Enabled Wireless Power Transfer Networks. IEEE J. Sel. Areas Commun. 2021, 39, 3081–3096. [Google Scholar] [CrossRef]
- Yuan, X.; Jiang, H.; Hu, Y.; Schmeink, A. Joint Analog Beamforming and Trajectory Planning for Energy-Efficient UAV-Enabled Nonlinear Wireless Power Transfer. IEEE J. Sel. Areas Commun. 2022, 40, 2914–2929. [Google Scholar] [CrossRef]
- Kang, J. Joint Design of Altitude and Channel Statistics based Energy Beamforming for UAV-enabled Wireless Energy Transfer. Drones 2024, 8, 668. [Google Scholar] [CrossRef]
- Kang, J. Joint Design of Transmit Waveform and Altitude for UAV-enabled Integrated Sensing and Wireless Power Transfer Systems. Electroncis 2024, 13, 4237. [Google Scholar]
- Mu, J.; Sun, Z. Trajectory Design for Multi-UAV-Aided Wireless Power Transfer toward Future Wireless Systems. Sensors 2022, 22, 6859. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Wu, P.; Hu, Y.; Cai, X.; Song, Q.; Chen, H. Joint Trajectories and Resource Allocation Design for Multi-UAV-Assisted Wireless Power Transfer with Nonlinear Energy Harvesting. Drones 2023, 7, 354. [Google Scholar] [CrossRef]
- Kaymak, Y.; Rojas-Cessa, R.; Feng, J.; Ansari, N.; Zhou, M.; Zhang, T. A Survey on Acquisition, Tracking, and Pointing Mechanisms for Mobile Free-Space Optical Communications. IEEE Commun. Surv. Tutor. 2018, 20, 1104–1123. [Google Scholar] [CrossRef]
- Hamza, A.S.; Deogun, J.S.; Alexander, D.R. Classification Framework for Free Space Optical Communication Links and Systems. IEEE Commun. Surv. Tutor. 2019, 21, 1346–1382. [Google Scholar] [CrossRef]
- Elamassie, M.; Uysal, M. Free Space Optical Communication: An Enabling Backhaul Technology for 6G Non-Terrestrial Networks. Photonics 2023, 10, 1210. [Google Scholar] [CrossRef]
- Nzekwu, N.J.; Fernandes, M.A.; Fernandes, G.M.; Monteiro, P.P.; Guiomar, F.P. A Comprehensive Review of UAV-Assisted FSO Relay Systems. Photonics 2024, 11, 274. [Google Scholar] [CrossRef]
- Khalighi, M.A.; Uysal, M. Survey on Free Space Optical Communication: A Communication Theory Perspective. IEEE Commun. Surv. Tutor. 2014, 16, 2231–2258. [Google Scholar] [CrossRef]
- Kaushal, H.; Kaddoum, G. Optical Communication in Space: Challenges and Mitigation Techniques. IEEE Commun. Surv. Tutor. 2017, 19, 57–96. [Google Scholar] [CrossRef]
- Wu, D.; Sun, X.; Ansari, N. An FSO-Based Drone Charging System for Emergency Communications. IEEE Trans. Veh. Tech. 2020, 69, 16155–16162. [Google Scholar] [CrossRef]
- Zhang, T.; Sun, X.; Wang, C. On Optimizing the Divergence Angle of an FSO-Based Fronthaul Link in Drone-Assisted Mobile Networks. IEEE Internet Things J. 2022, 9, 6914–6921. [Google Scholar] [CrossRef]
- Yu, L.; Sun, X.; Shao, S.; Chen, Y.; Albelaihi, R. Backhaul-Aware Drone Base Station Placement and Resource Management for FSO-Based Drone-Assisted Mobile Networks. IEEE Trans. Net. Sci. Eng. 2023, 10, 1659–1668. [Google Scholar] [CrossRef]
- Gupta, A.; Dhawan, D.; Gupta, N. Review on UAV-based FSO links: Recent advances, challenges, and performance metrics. Optical Eng. 2024, 63, 41204. [Google Scholar] [CrossRef]
- Singh, D.; Swaminathan, R. Comprehensive performance analysis of hovering UAV-based FSO communication system. IEEE Photonics J. 2022, 14, 7352013. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Kandeepan, S.; Lardner, S. Optimal LAP Altitude for Maximum Coverage. IEEE Wirel. Commun. Lett. 2014, 3, 569–572. [Google Scholar] [CrossRef]
- Khuwaja, A.A.; Chen, Y.; Zhao, N.; Alouini, M.-S.; Dobbins, P. A Survey of Channel Modeling for UAV Communications. IEEE Commun. Surv. Tutorials 2018, 20, 2804–2821. [Google Scholar] [CrossRef]
- Al-Hourani, A.; Gomez, K. Modeling cellular-to-UAV path-loss for suburban environments. IEEE Wirel. Commun. Lett. 2018, 7, 82–85. [Google Scholar] [CrossRef]
- Yu, Z.; Si, Z.; Li, X.; Wang, D.; Song, H. A Novel Hybrid Particle Swarm Optimization Algorithm for Path Planning of UAVs. IEEE Internet Things J. 2022, 9, 22547–22558. [Google Scholar] [CrossRef]
- Shi, L.; Xu, S. UAV Path Planning with QoS Constraint in Device-to-Device 5G Networks Using Particle Swarm Optimization. IEEE Access 2020, 8, 137884–137896. [Google Scholar] [CrossRef]
- Sonny, A.; Yeduri, S.R.; Cenkeramaddi, L.R. Autonomous UAV Path Planning Using Modified PSO for UAV-Assisted Wireless Networks. IEEE Access 2023, 11, 70353–70367. [Google Scholar] [CrossRef]
- Zhang, W.; Zhang, W. An Efficient UAV Localization Technique Based on Particle Swarm Optimization. IEEE Trans. Veh. Tech. 2022, 71, 9544–9557. [Google Scholar] [CrossRef]
- Kang, J.; Choi, W. Novel Codebook Design for Channel State Information Quantization in MIMO Rician Fading Channels with Limited Feedback. IEEE Trans. Signal Process. 2021, 69, 2858–2872. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Descriptions | Symbols | Values |
|---|---|---|
| Transmit power at the FSO transmitter [19] | 1 W | |
| Wavelength of an optical beam [21] | 1550 nm | |
| Strength of atmospheric turbulence [21] | ||
| Radius of the FSO receiver’s aperture [21] | 25 mm | |
| Minimum and maximum | rad | |
| divergence angle [21] | 0.1 mrad | |
| Carrier frequency [25,26,27] | 2 GHz | |
| Environmental dependent | 9.61 | |
| LoS probability related parameters [25,26,27] | 0.16 | |
| Environmental dependent | 1 dB | |
| average additional path loss [25,26,27] | 21 dB | |
| Minimum and maximum | 50 m | |
| altitude of the UAV [10,11] | 150 m | |
| Altitude of the OBS [10,11] | 50 m | |
| Coefficients on PSO algorithm [30,31] | 0.5 | |
| 1.5 | ||
| 1.5 | ||
| (Number of particles) | M | 32 |
| (Iteration for non-improved termination) | 20 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, J. Joint Divergence Angle of Free Space Optics (FSO) Link and UAV Trajectory Design in FSO-Based UAV-Enabled Wireless Power Transfer Relay Systems. Photonics 2024, 11, 1136. https://doi.org/10.3390/photonics11121136
Kang J. Joint Divergence Angle of Free Space Optics (FSO) Link and UAV Trajectory Design in FSO-Based UAV-Enabled Wireless Power Transfer Relay Systems. Photonics. 2024; 11(12):1136. https://doi.org/10.3390/photonics11121136
Chicago/Turabian StyleKang, Jinho. 2024. "Joint Divergence Angle of Free Space Optics (FSO) Link and UAV Trajectory Design in FSO-Based UAV-Enabled Wireless Power Transfer Relay Systems" Photonics 11, no. 12: 1136. https://doi.org/10.3390/photonics11121136
APA StyleKang, J. (2024). Joint Divergence Angle of Free Space Optics (FSO) Link and UAV Trajectory Design in FSO-Based UAV-Enabled Wireless Power Transfer Relay Systems. Photonics, 11(12), 1136. https://doi.org/10.3390/photonics11121136