
Microfluidic Network Simulations Enable On-Demand Prediction of Control Parameters for Operating Lab-on-a-Chip-Devices


Abstract
:1. Introduction
2. Materials and Methods
2.1. Buffer and Sample Preparation
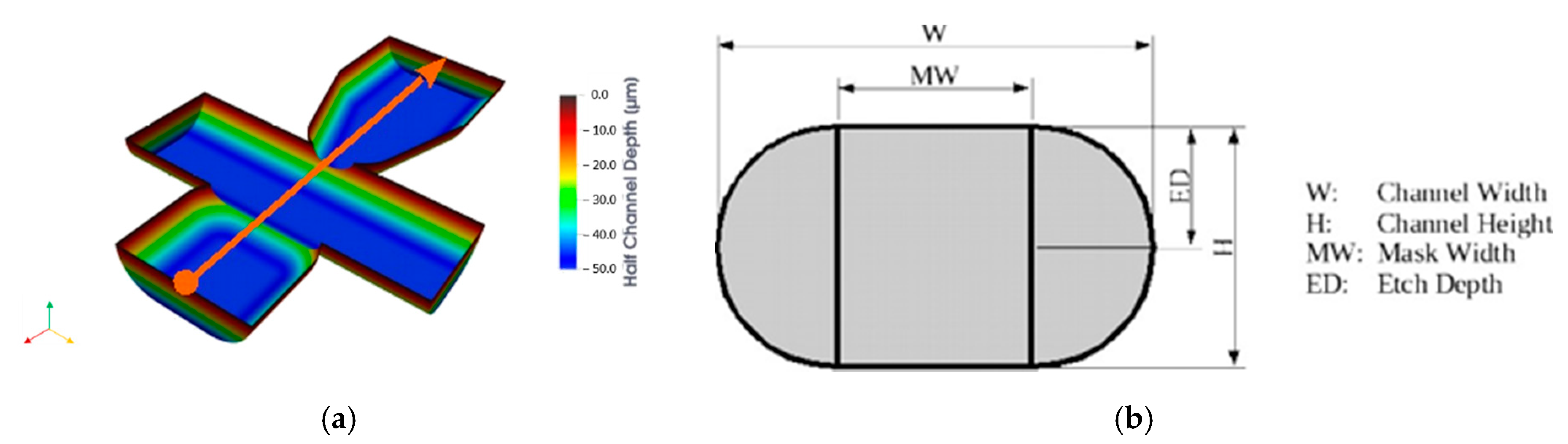
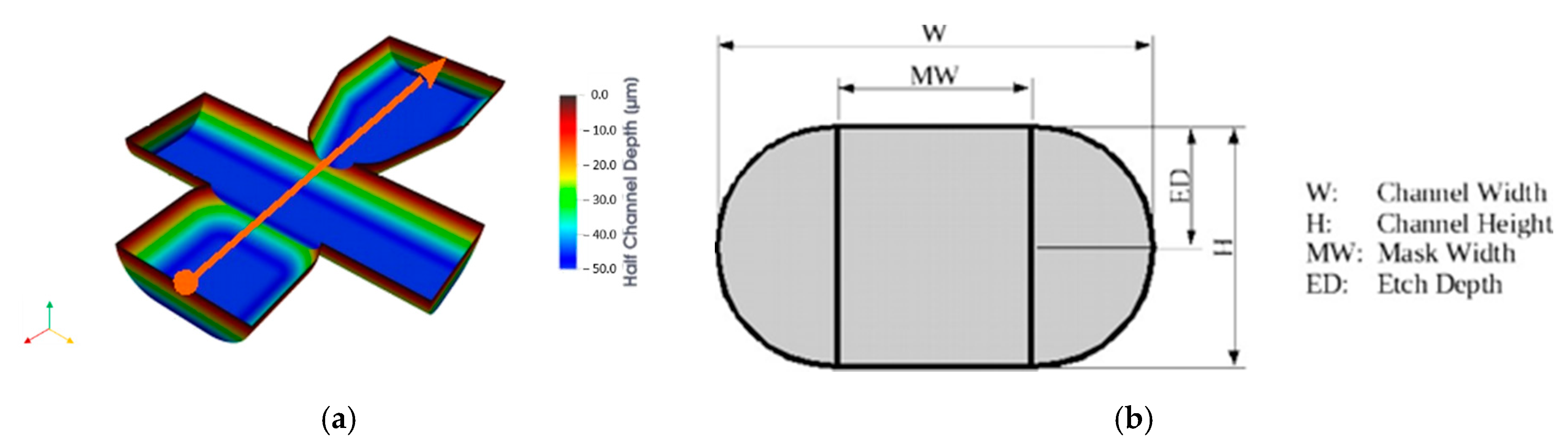
2.2. Microfluidic Chip Fabrication and Chip Preparation
2.3. Microfluidic Control
2.4. Optical Setup and Image Acquisition
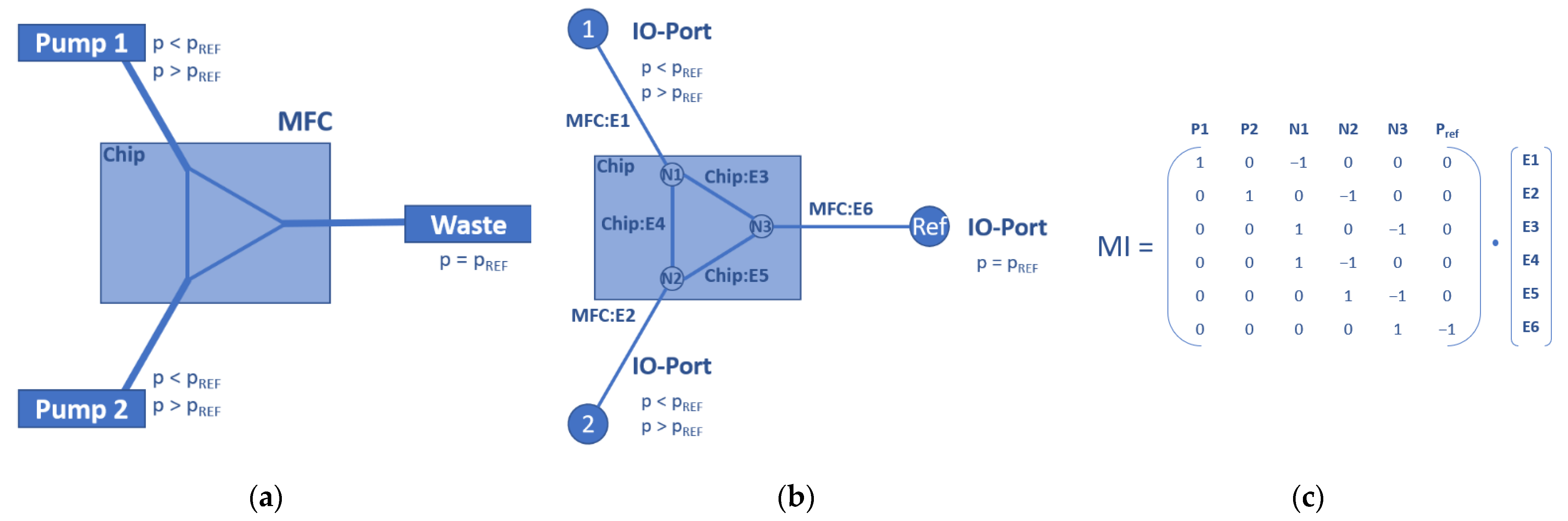
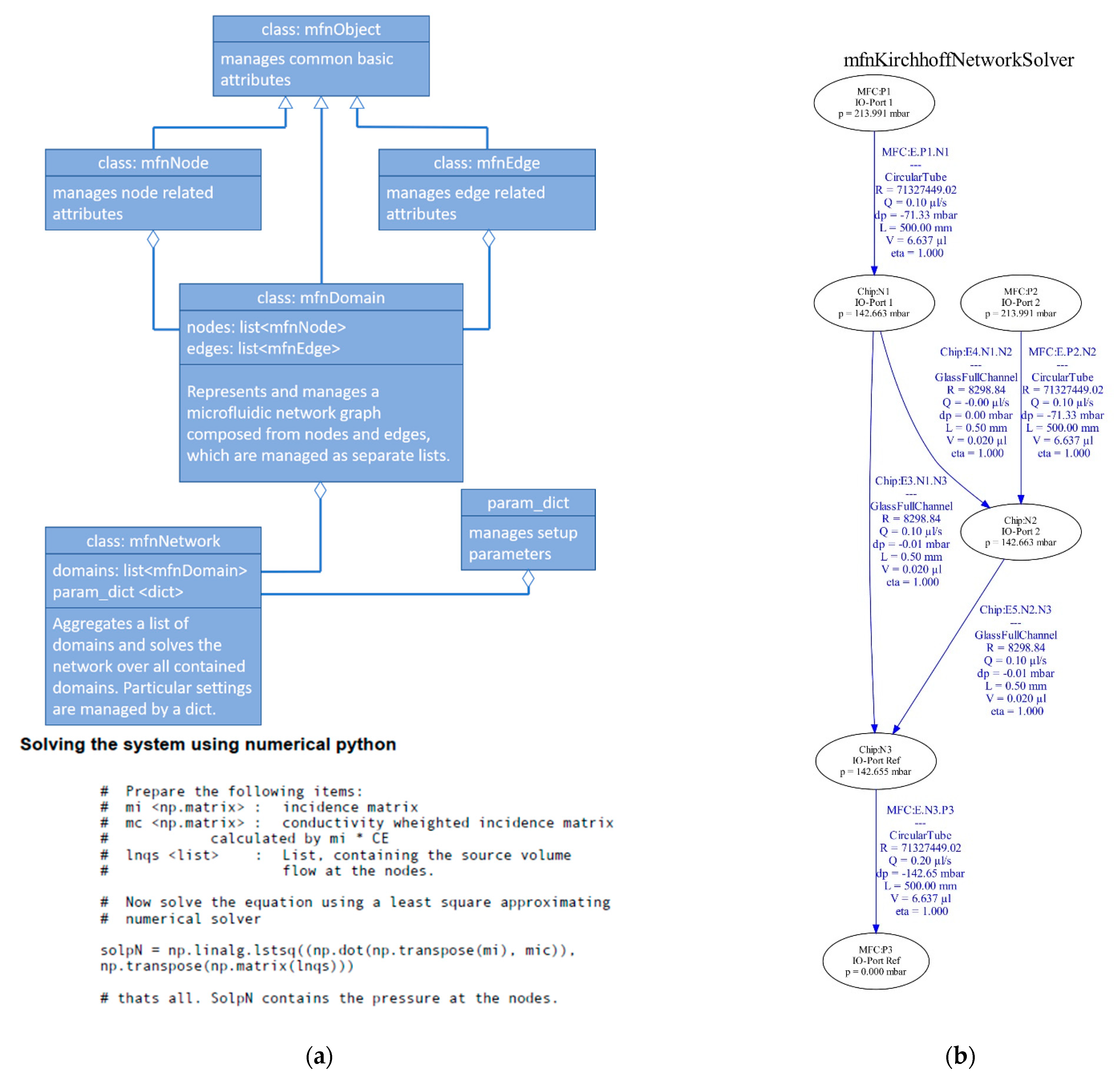
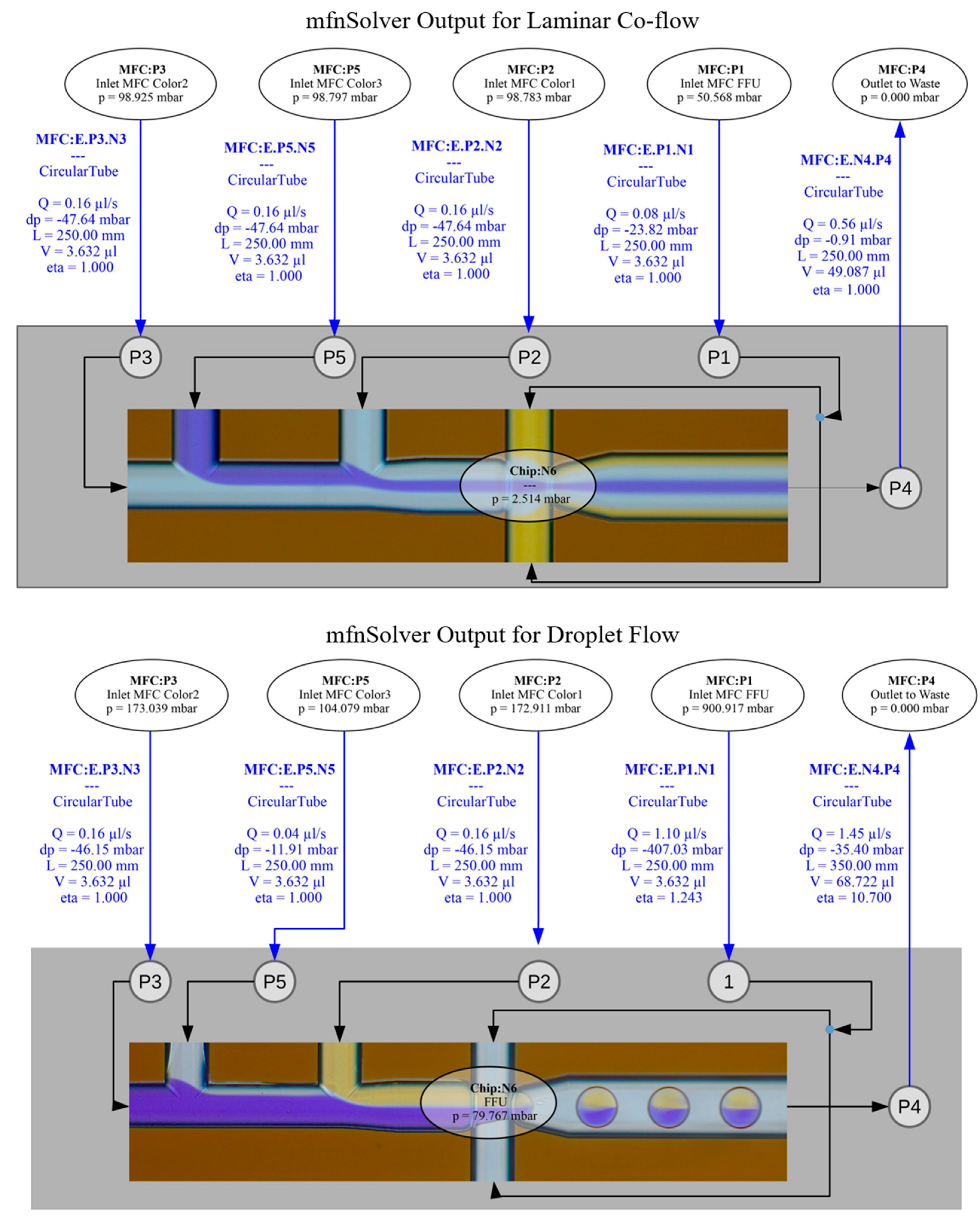
3. Microfluidic Network Solver (MfnSolver)
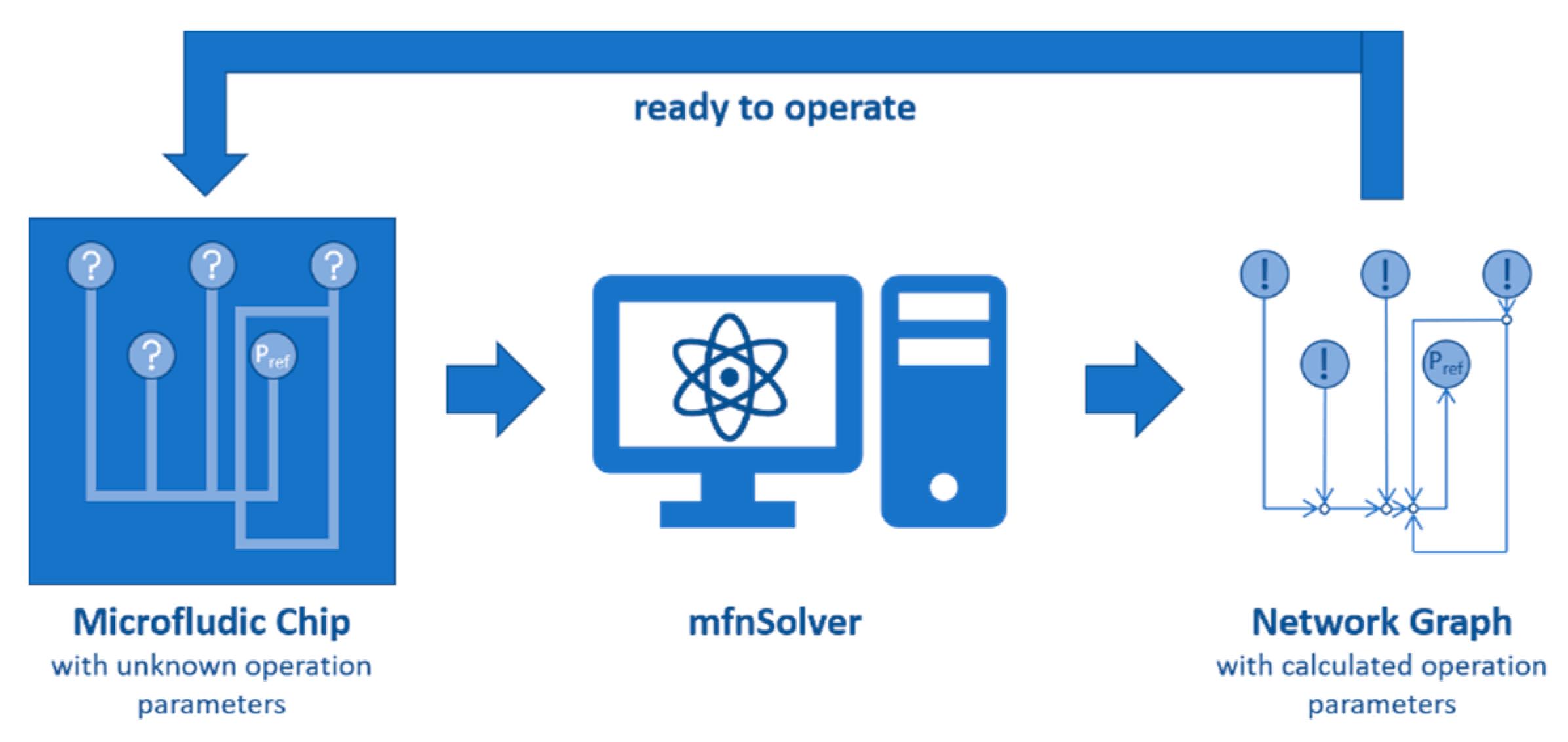
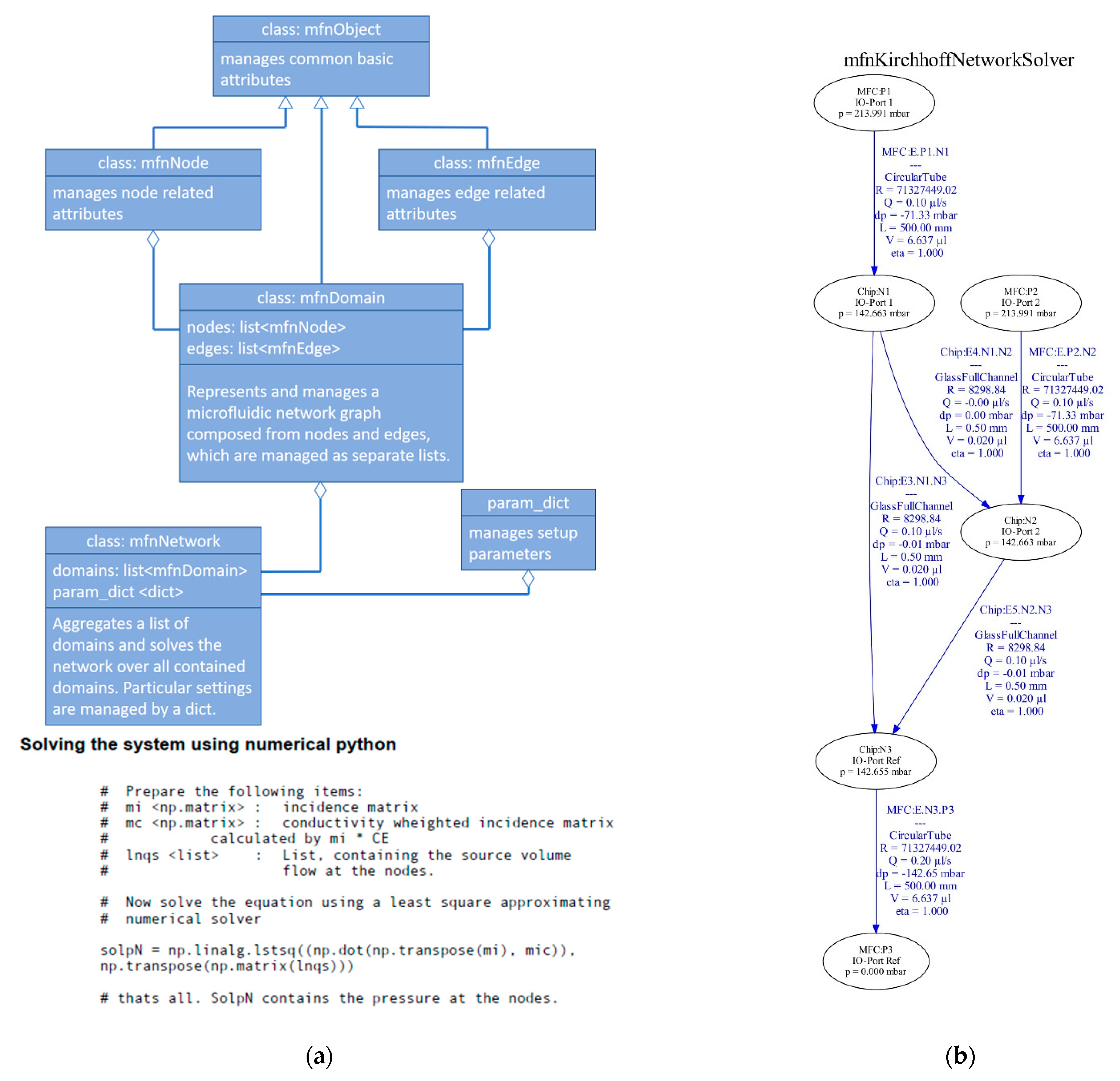
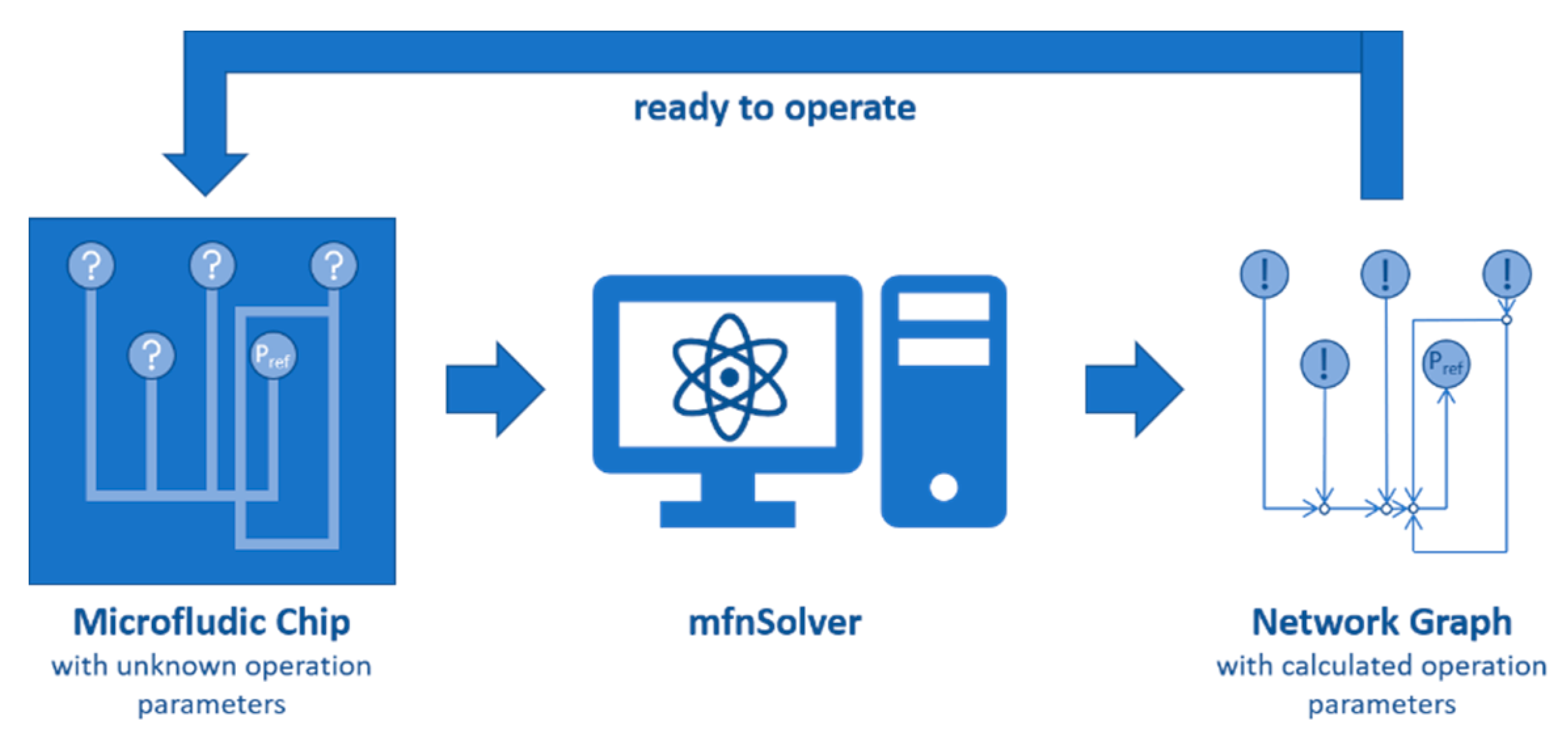
3.1. MfnSolver Concept and Implementation
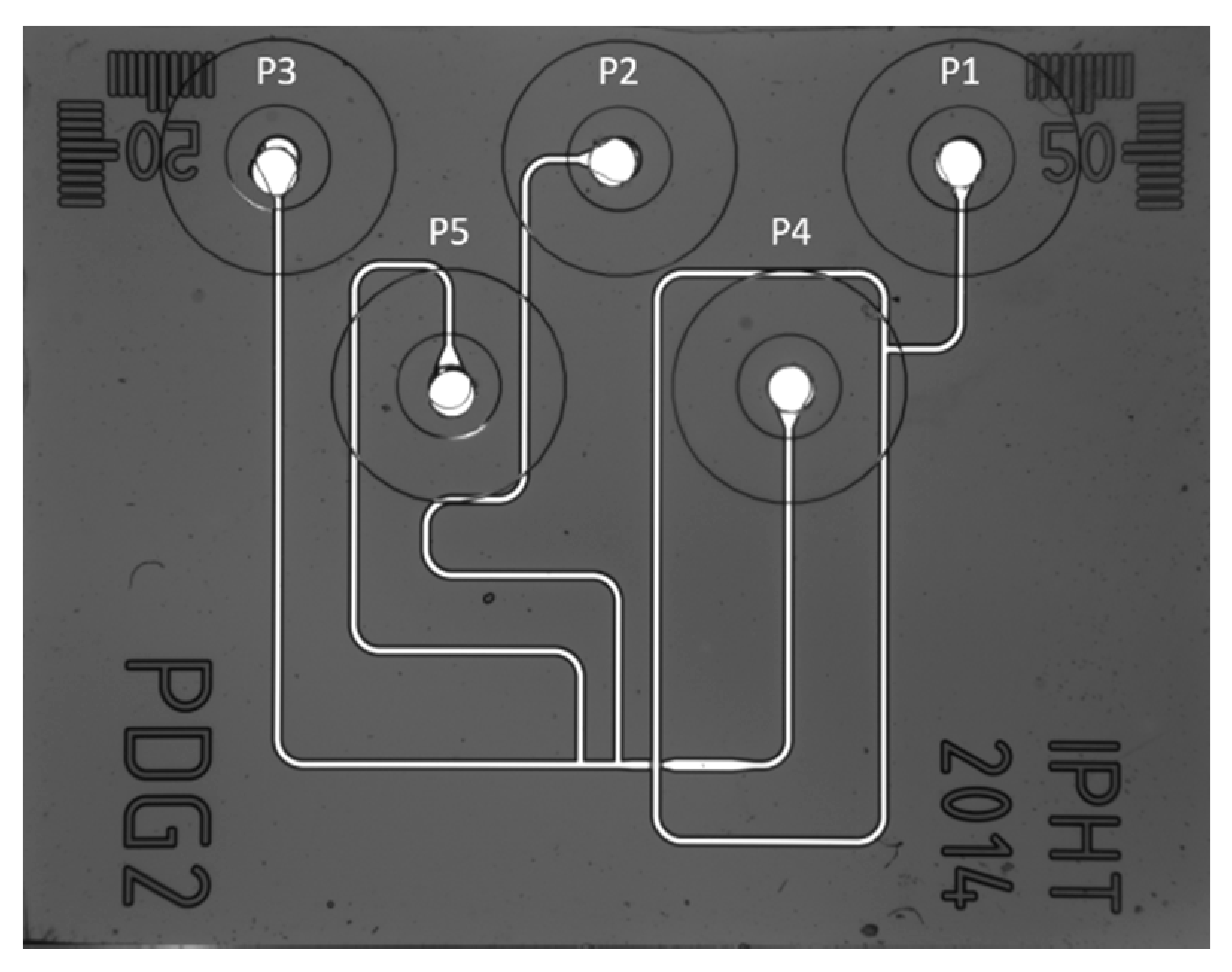
3.2. PDG2 Chip and Network Model
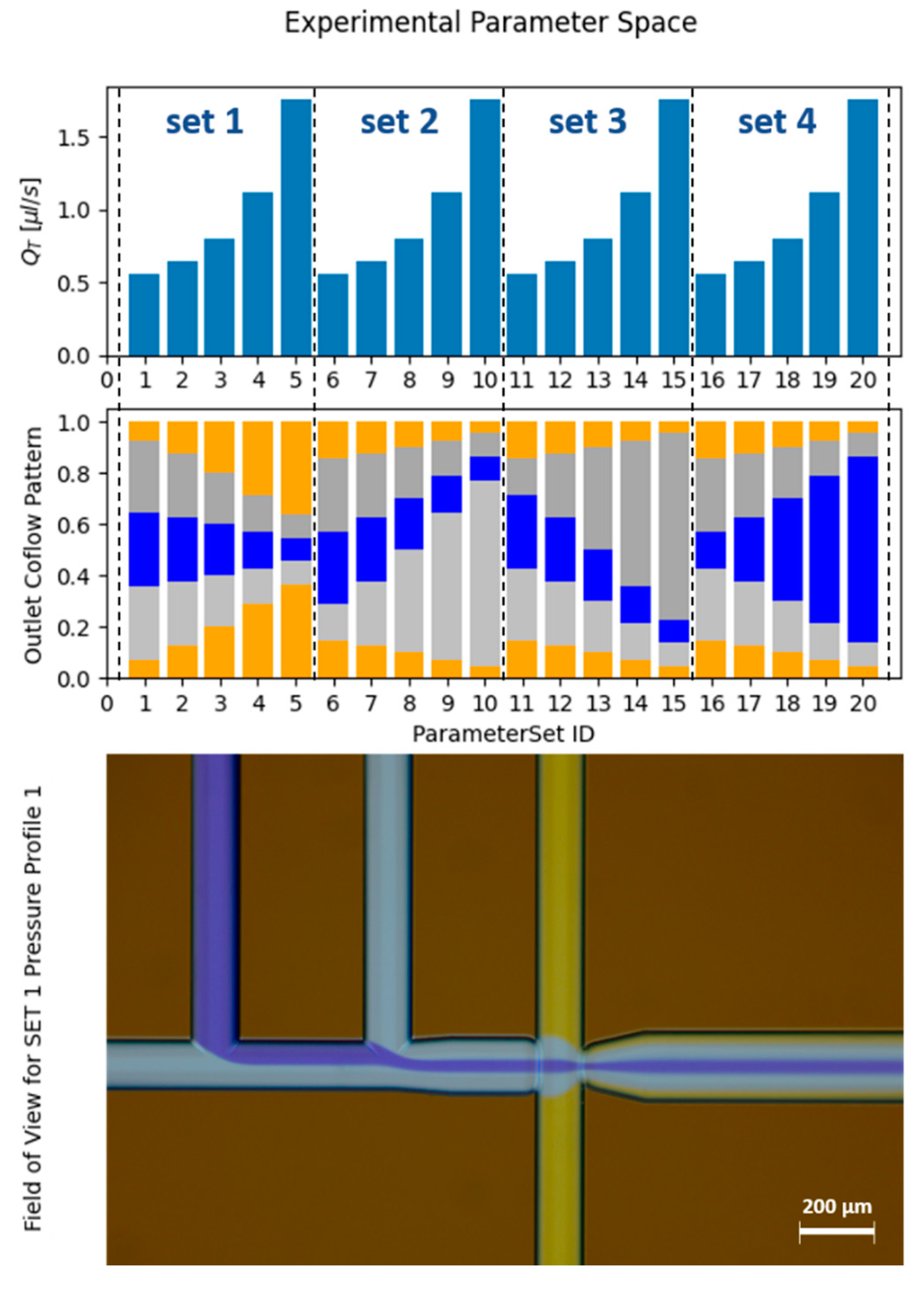
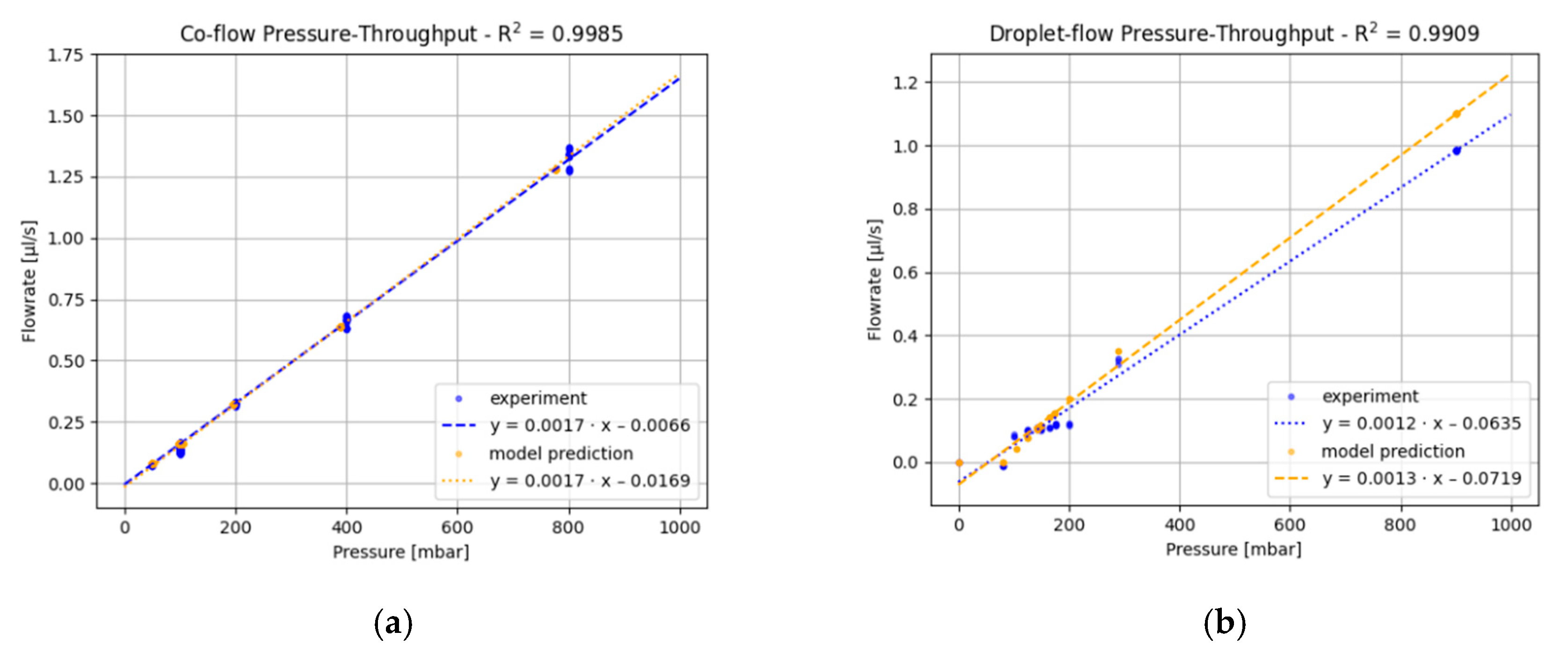
4. Experimental Validation
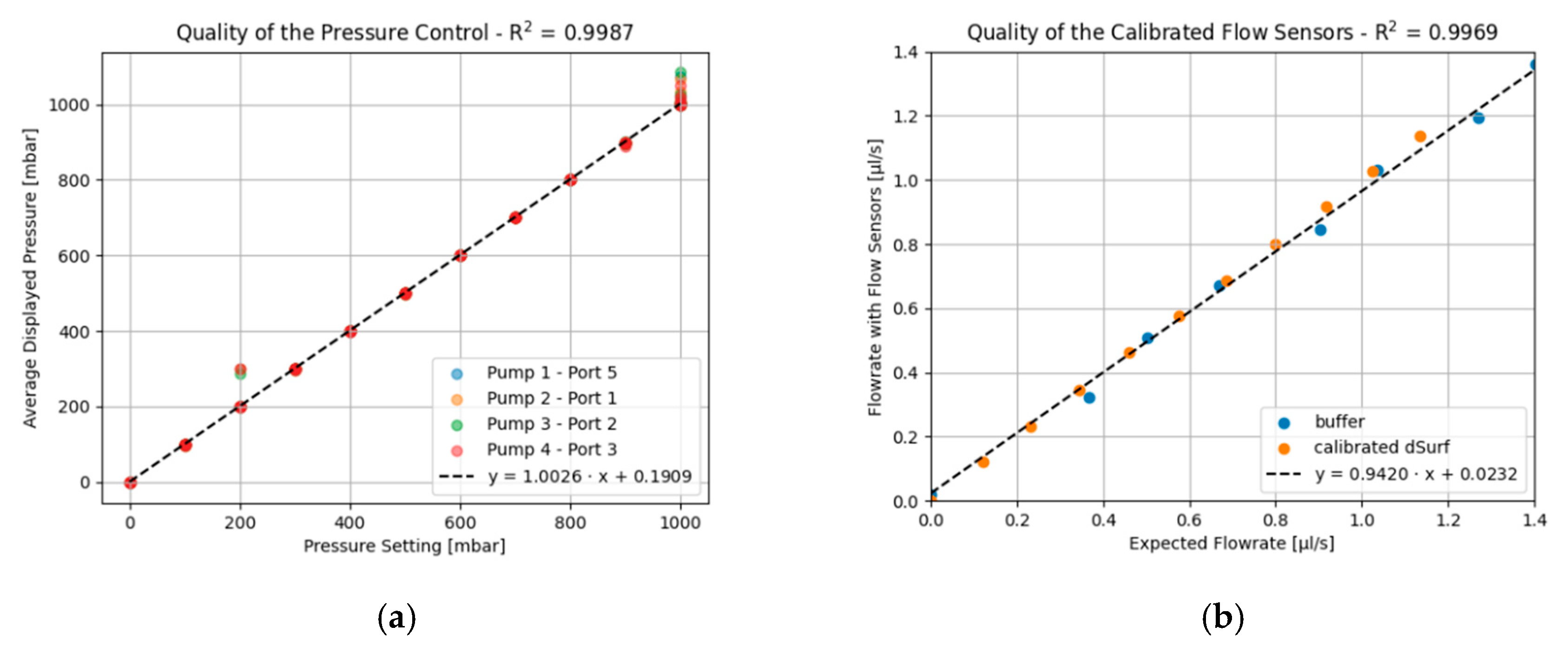
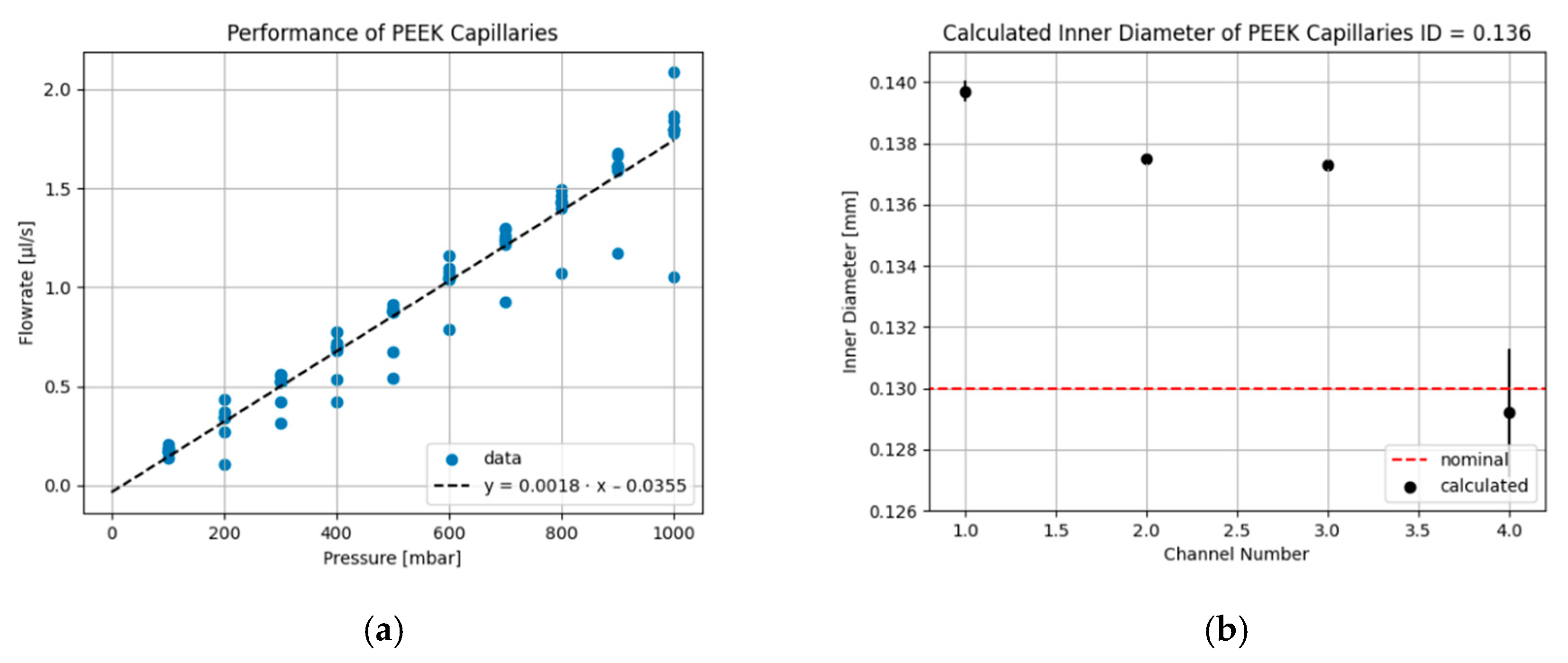
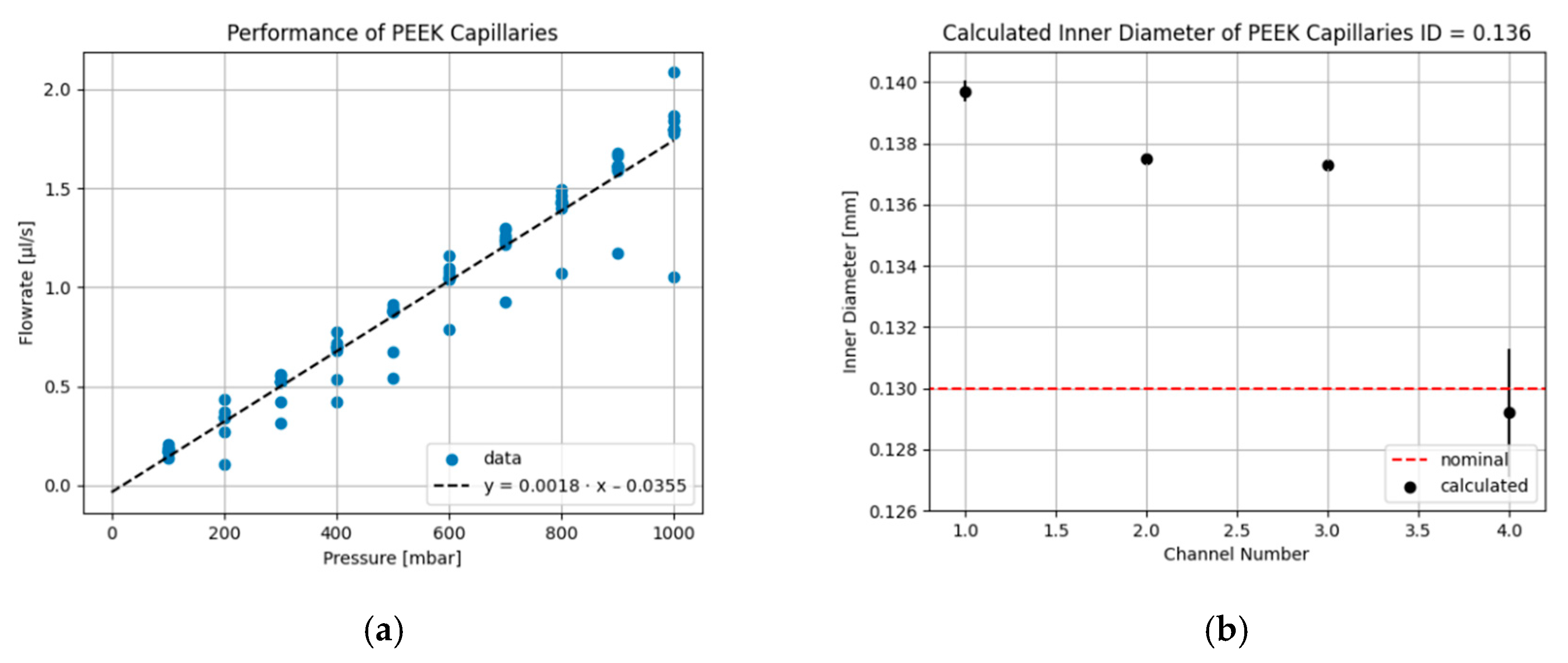
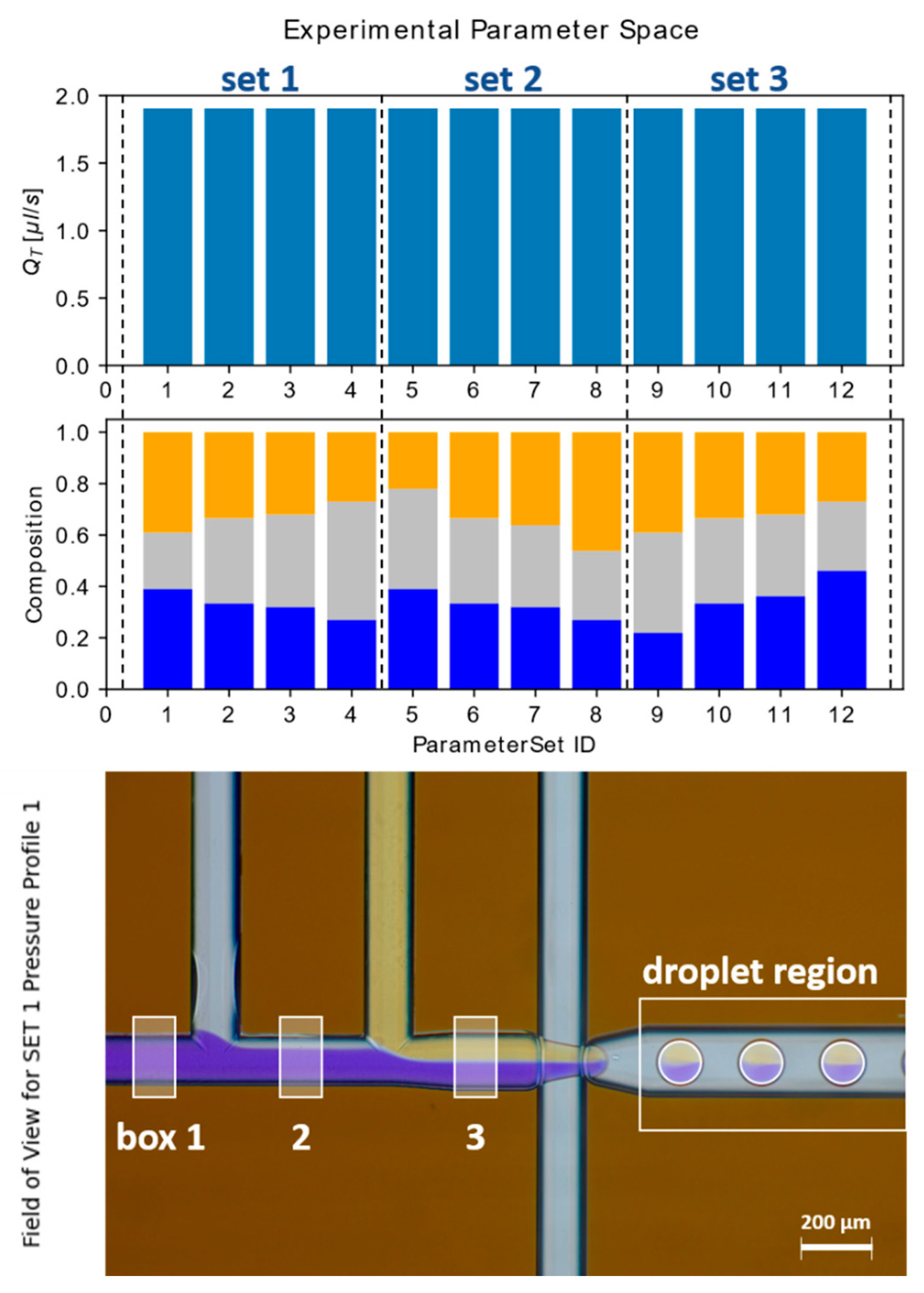
4.1. Validation of Flow Rate Prediction at Feedlines
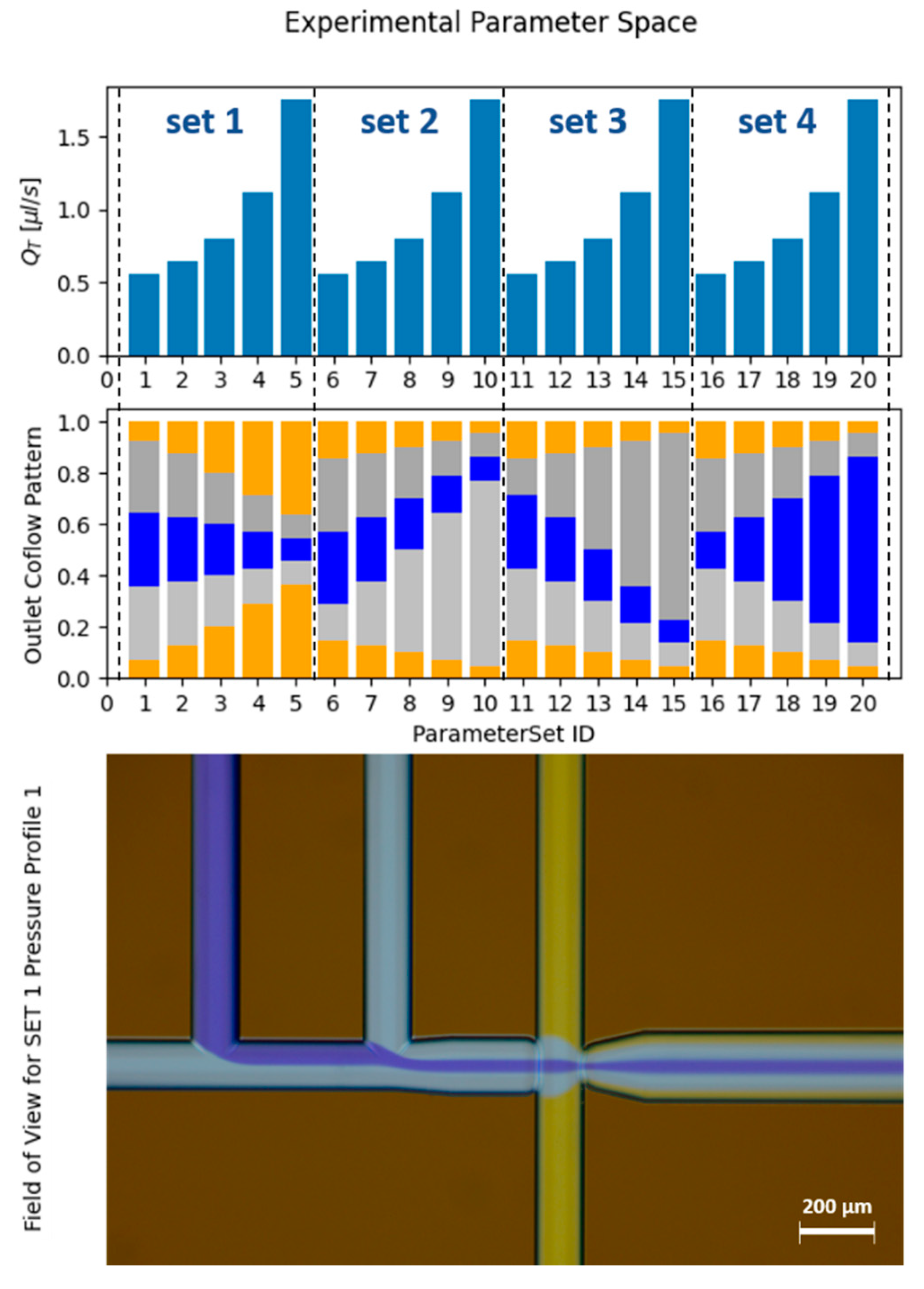
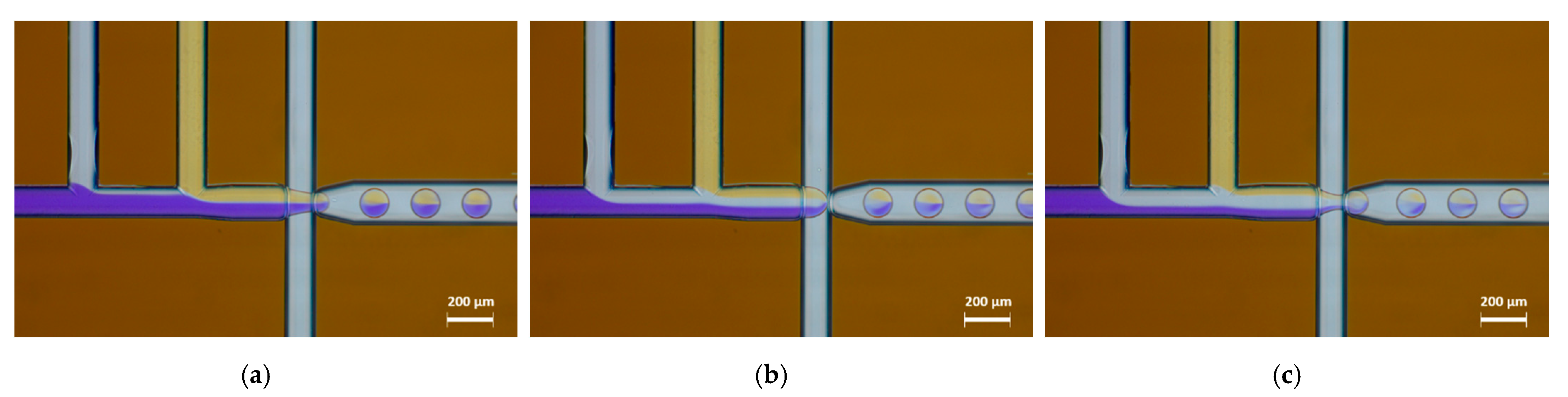
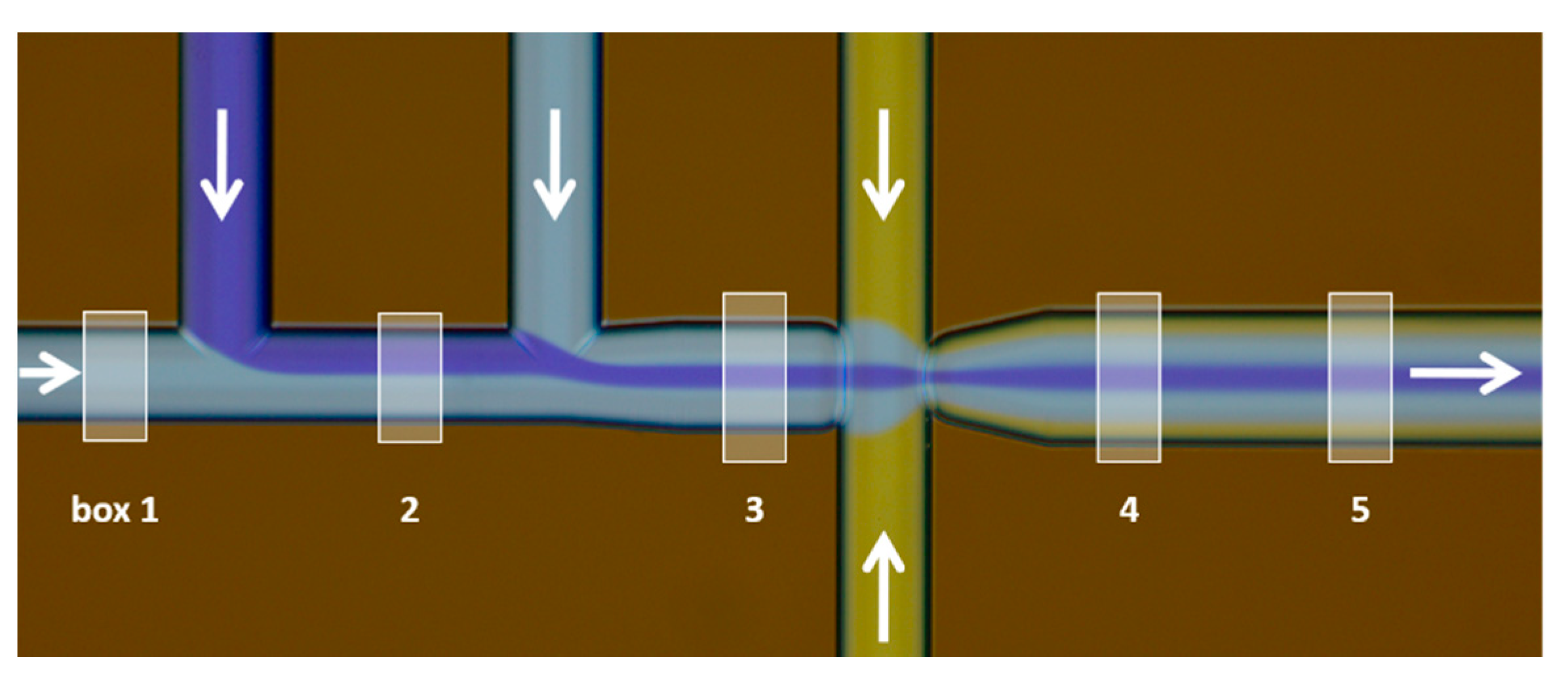
4.2. Validation of Chip Internal Flow
4.2.1. Data acquisition and Required Datasets
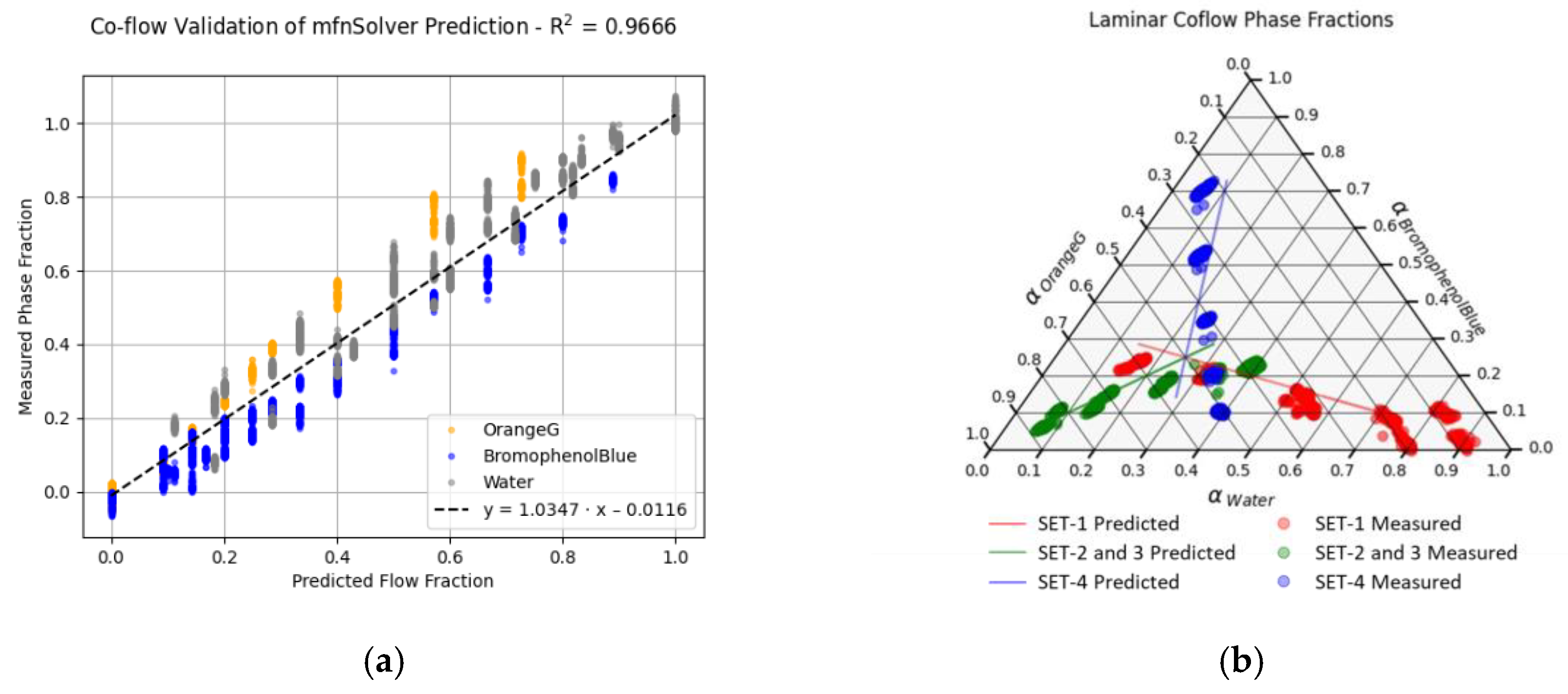
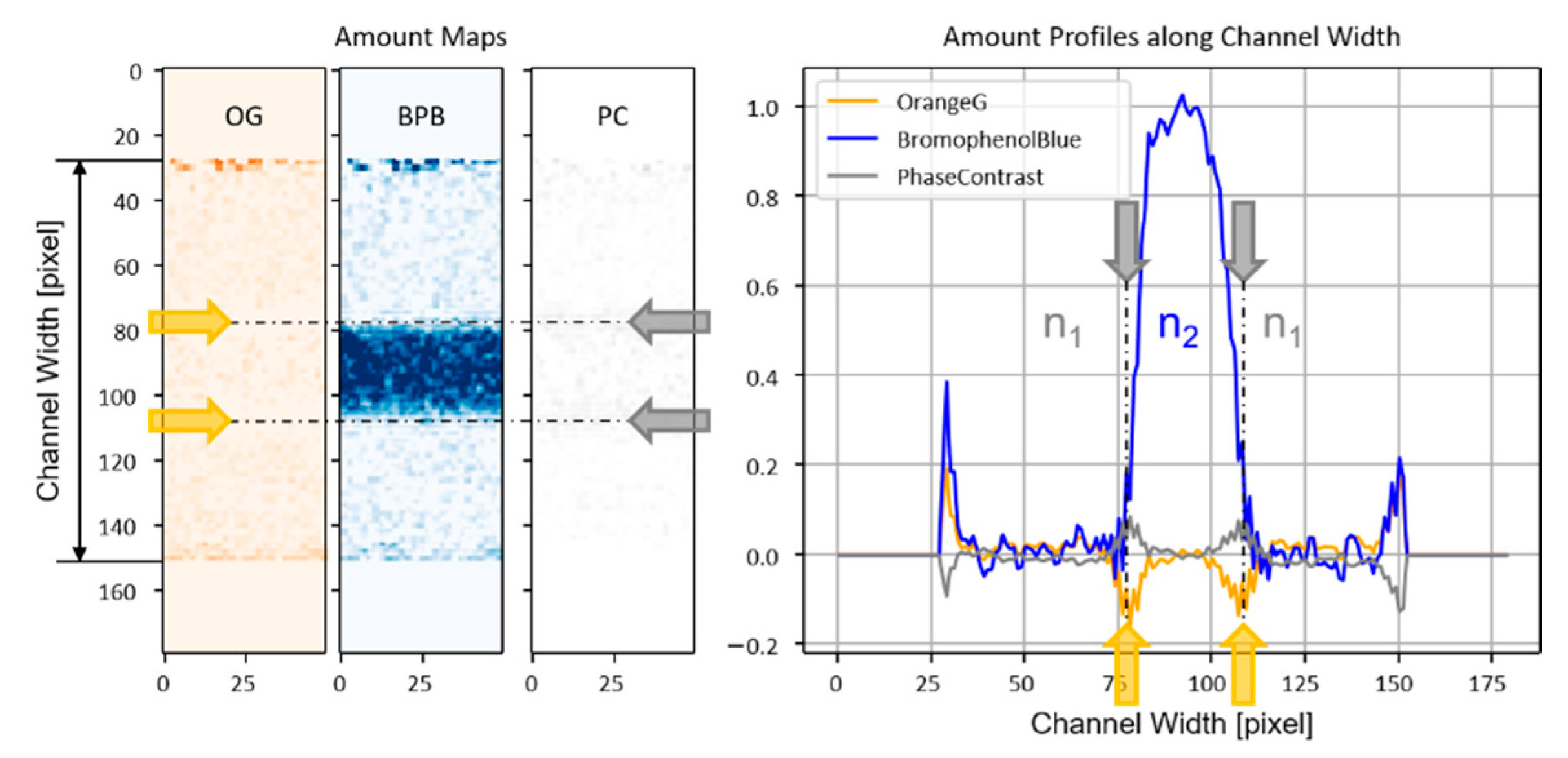
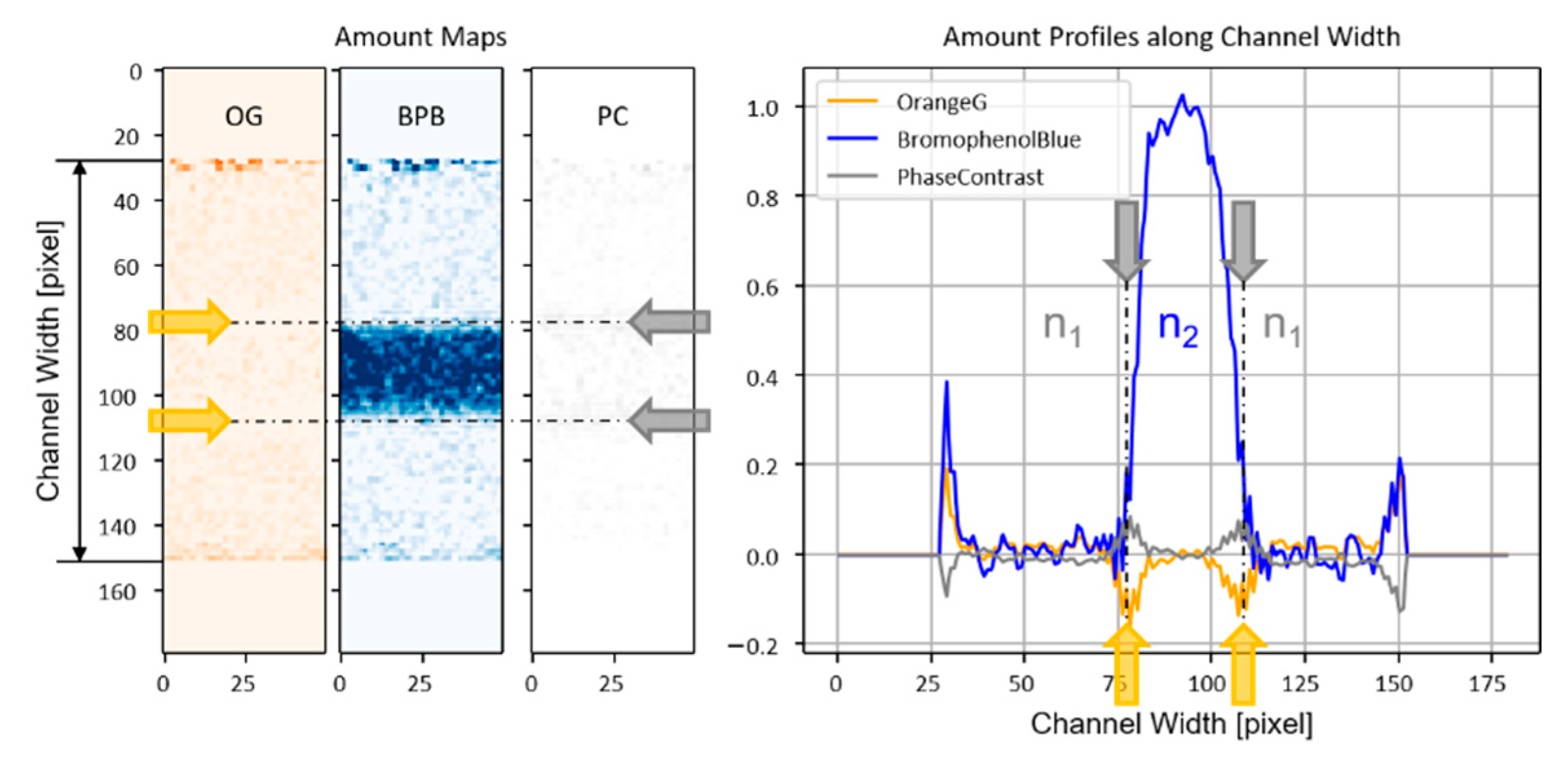
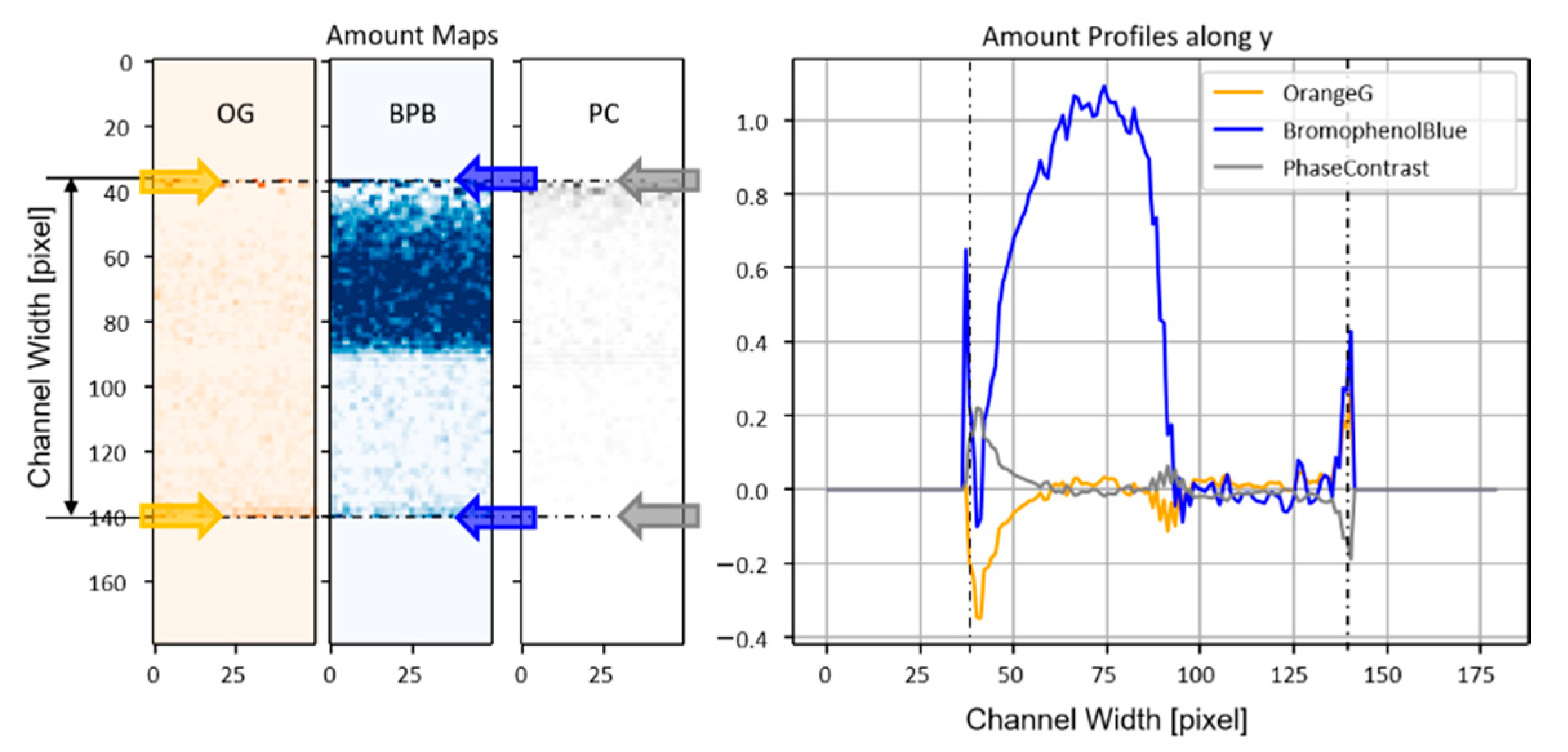
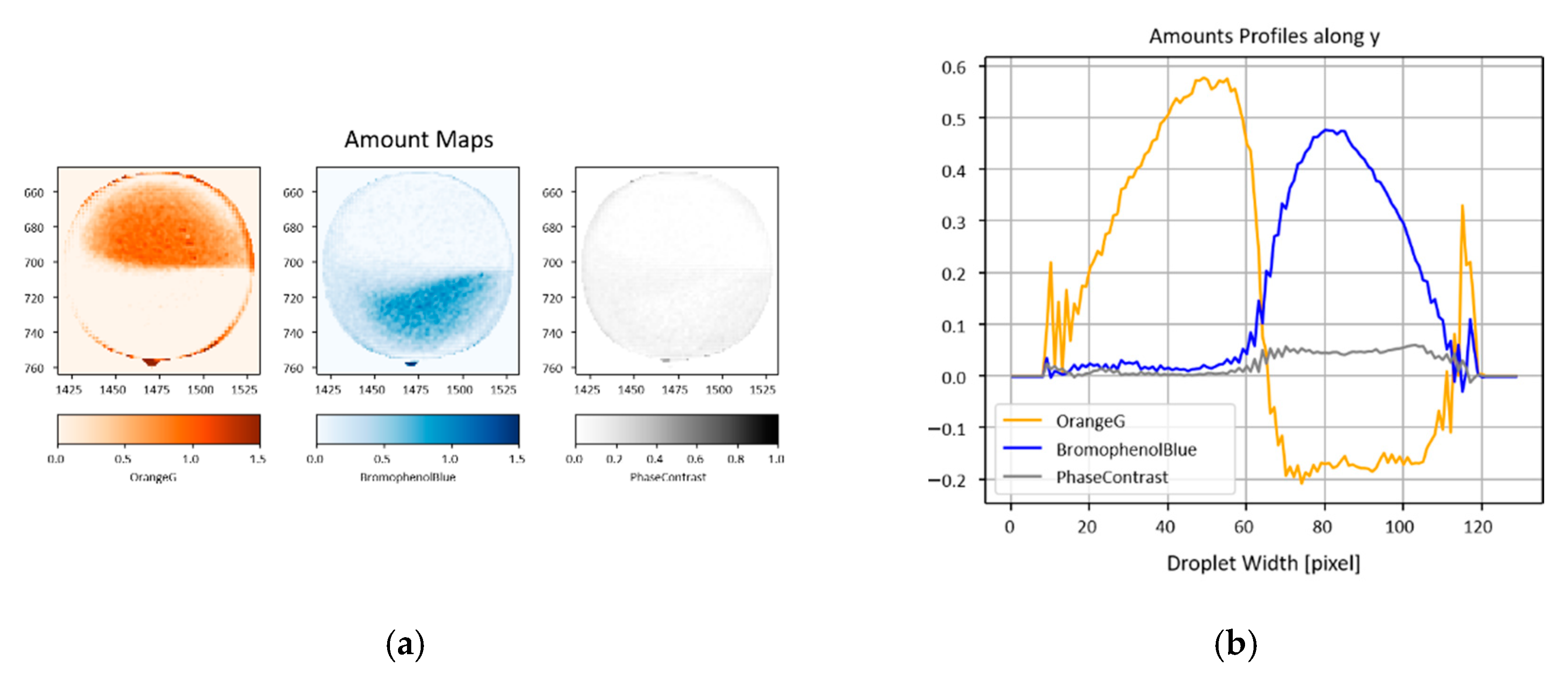
4.2.2. Single-Pixel Chemometric Analysis
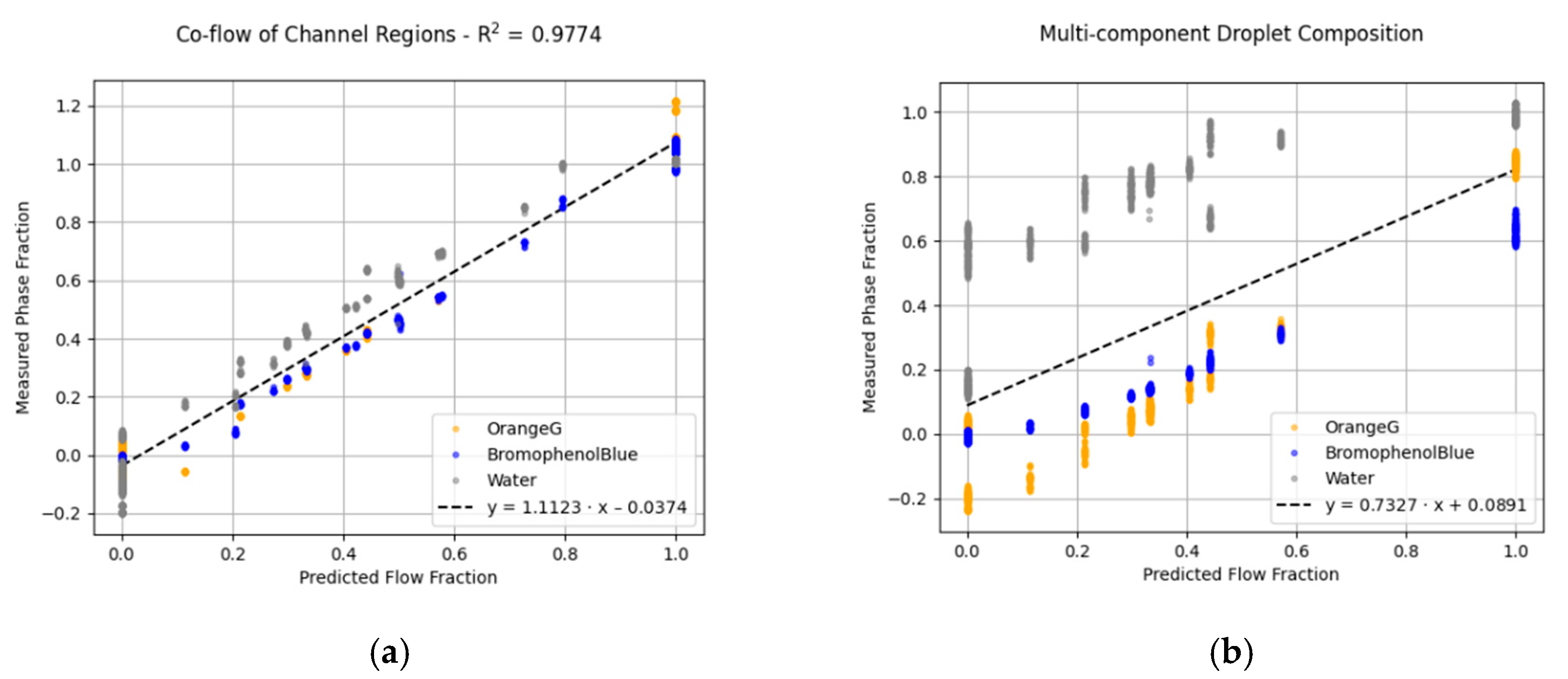
4.2.3. Accumulated Phase Fractions in a Channel
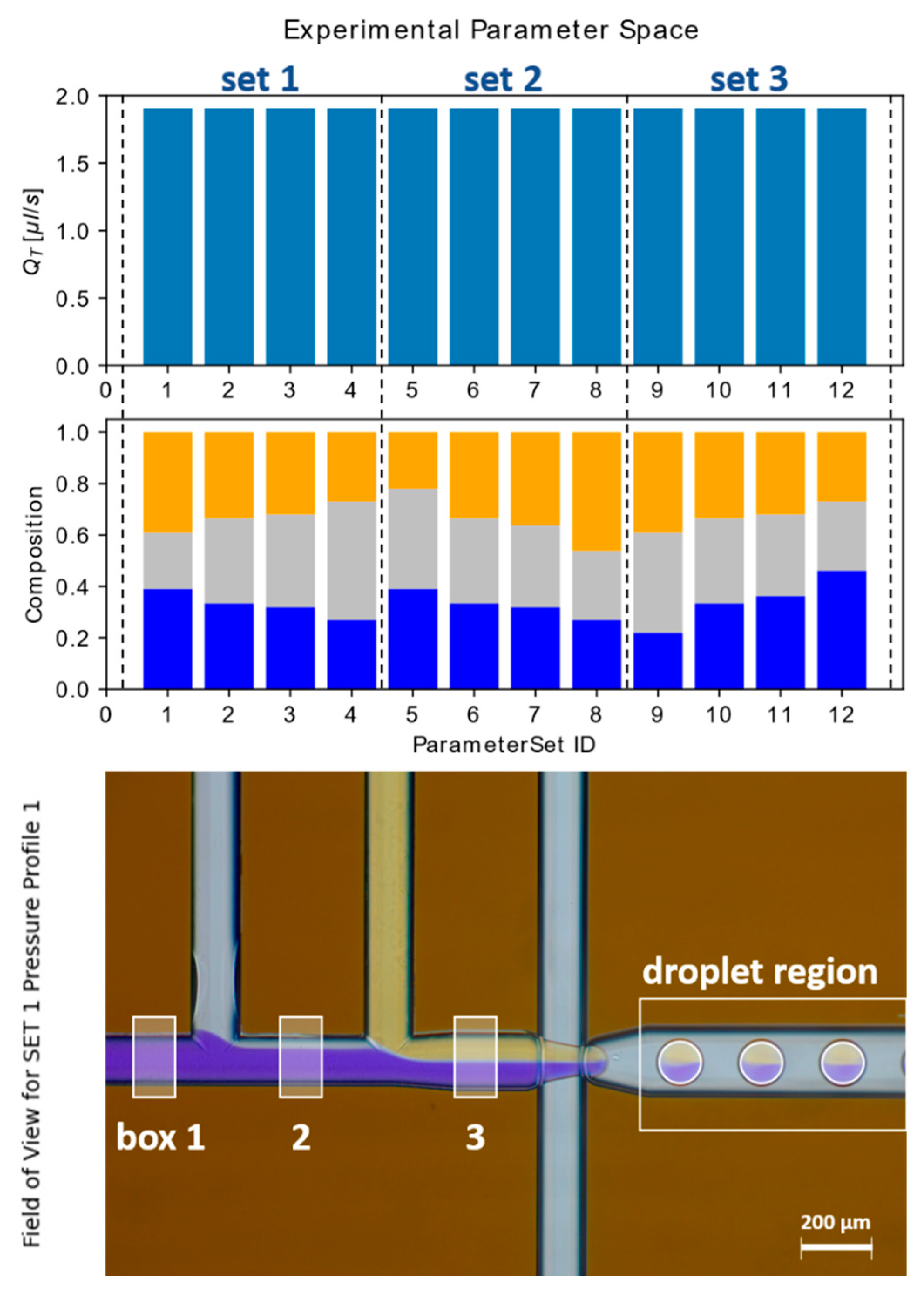
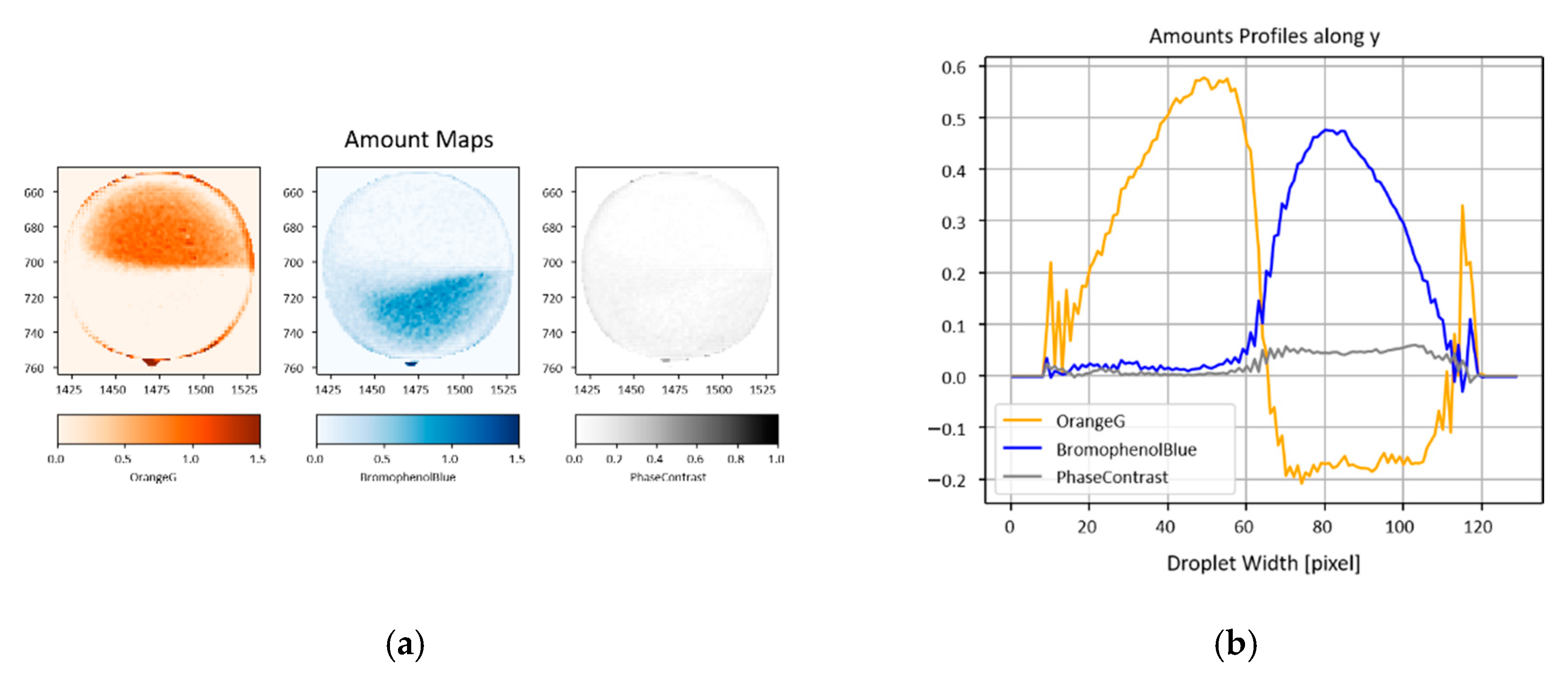
4.2.4. Validation of Predicted Flow Rates Based on Droplet Composition
5. Precision of the Chemometric Analysis in Optofluidics
- Optical refraction at discrete refractive index transitions at the curved channel sidewalls;
- Optical refraction at dynamic refractive index changes at the boundary of the two fluid samples, with different refractive indices. Here, one has to note that adding a dye to a buffer changes its refractive index.
- Chromatic aberration (chromatic distortion) due to refraction, which applies to items 1 and 2.
6. Discussion and Outlook
7. Final Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Huebner, A.; Sharma, S.; Srisa-Art, M.; Hollfelder, F.; Edel, J.B.; Demello, A.J. Microdroplets: A sea of applications? Lab Chip 2008, 8, 1244–1254. [Google Scholar] [CrossRef] [PubMed]
- Guenther, A.; Jensen, K.F. Multiphase microfluidics: From flow characteristics to chemical and materials synthesis. Lab Chip 2006, 6, 1487–1503. [Google Scholar] [CrossRef] [PubMed]
- Fan, Y.-Q.; Wang, M.; Gao, F.; Zhuang, J.; Tang, G.; Zhang, Y.-J. Recent Development of Droplet Microfluidics in Digital Polymerase Chain Reaction. Chin. J. Anal. Chem. 2016, 44, 1300–1307. [Google Scholar] [CrossRef]
- Fallahi, H.; Zhang, J.; Phan, H.-P.; Nguyen, N.-T. Flexible Microfluidics: Fundamentals, Recent Developments, and Applications. Micromachines 2019, 10, 830. [Google Scholar] [CrossRef] [Green Version]
- Geng, Y.; Ling, S.; Huang, J.; Xu, J. Multiphase Microfluidics: Fundamentals, Fabrication, and Functions. Small 2020, 16, e1906357. [Google Scholar] [CrossRef] [PubMed]
- Sun, K.; Wang, Z.; Jiang, X. Modular microfluidics for gradient generation. Lab Chip 2008, 8, 1536–1543. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.; Liu, Z.; Pang, Y. Concentration gradient generation methods based on microfluidic systems. RSC Adv. 2017, 7, 29966–29984. [Google Scholar] [CrossRef] [Green Version]
- Liu, Z.; Fontana, F.; Python, A.; Hirvonen, J.T.; Santos, H.A. Microfluidics for Production of Particles: Mechanism, Methodology, and Applications. Small 2019, 16, e1904673. [Google Scholar] [CrossRef]
- Jahn, A.; Reiner, J.E.; Vreeland, W.N.; De Voe, N.L.; Locascio, L.E.; Gaitan, M. Preparation of nanoparticles by continuous-flow microfluidics. J. Nanopart. Res. 2008, 10, 925–934. [Google Scholar] [CrossRef]
- Thiele, M.; Knauer, A.; Malsch, D.; Csáki, A.; Henkel, T.; Köhler, J.M.; Fritzsche, W. Combination of microfluidic high-throughput production and parameter screening for efficient shaping of gold nanocubes using Dean-flow mixing. Lab Chip 2017, 17, 1487–1495. [Google Scholar] [CrossRef] [PubMed]
- Gomez, F.A. The future of microfluidic point-of-care diagnostic devices. Bioanalysis 2013, 5, 1–3. [Google Scholar] [CrossRef] [PubMed]
- Reuter, C.; Hentschel, S.; Breitenstein, A.; Heinrich, E.; Aehlig, O.; Henkel, T.; Csáki, A.; Fritzsche, W. Chip-based duplex real-time PCR for water quality monitoring concerning Legionella pneumophila and Legionella spp. Water Environ. J. 2021, 35, 371–380. [Google Scholar] [CrossRef]
- Tsur, E.E. Computer-Aided Design of Microfluidic Circuits. Annu. Rev. Biomed. Eng. 2020, 22, 285–307. [Google Scholar] [CrossRef] [PubMed]
- Kielpinski, M.; Walther, O.; Cao, J.; Henkel, T.; Köhler, J.M.; Groß, G.A. Microfluidic Chamber Design for Controlled Droplet Expansion and Coalescence. Micromachines 2020, 11, 394. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Feinerman, O.; Sofer, M.; Tsur, E.E. Computer-Aided Design of Valves-Integrated Microfluidic Layouts Using Parameter-Guided Electrical Models. In Proceedings of the Fluids Engineering Division Summer Meeting in Montreal, Montreal, QC, Canada, 15–20 July 2018; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2018. [Google Scholar]
- Lee, K.; Kim, C.; Ahn, B.; Panchapakesan, R.; Full, A.R.; Nordee, L.; Kang, J.Y.; Oh, K.W. Generalized serial dilution module for monotonic and arbitrary microfluidic gradient generators. Lab Chip 2009, 9, 709–717. [Google Scholar] [CrossRef]
- Oh, K.W.; Lee, K.; Ahn, B.; Furlani, E.P. Design of pressure-driven microfluidic networks using electric circuit analogy. Lab Chip 2012, 12, 515–545. [Google Scholar] [CrossRef] [PubMed]
- Gleichmann, N.; Malsch, D.; Horbert, P.; Henkel, T. Toward microfluidic design automation: A new system simulation toolkit for the in silico evaluation of droplet-based lab-on-a-chip systems. Microfluid. Nanofluid. 2015, 18, 1095–1105. [Google Scholar] [CrossRef]
- Seemann, R.; Brinkmann, M.; Pfohl, T.; Herminghaus, S. Droplet based microfluidics. Rep. Prog. Phys. 2012, 75, 16601. [Google Scholar] [CrossRef]
- Garstecki, P.; Fuerstman, M.J.; Stone, H.A.; Whitesides, G.M. Formation of droplets and bubbles in a microfluidic T-junction—scaling and mechanism of break-up. Lab Chip 2006, 6, 437–446. [Google Scholar] [CrossRef]
- Akers, A.; Gassman, M.; Smith, R.J. Hydraulic Power System Analysis; CRC/Taylor & Francis: Boca Raton, FL, USA, 2006; ISBN 0824799569. [Google Scholar]
- Tsur, E.E.; Zimerman, M.; Maor, I.; Elrich, A.; Nahmias, Y. Microfluidic Concentric Gradient Generator Design for High-Throughput Cell-Based Studies. Front. Bioeng. Biotechnol. 2017, 5, 21. [Google Scholar] [CrossRef] [Green Version]
- Kirchhoff, S. Ueber den Durchgang eines elektrischen Stromes durch eine Ebene, insbesondere durch eine kreisförmige. Ann. Phys. 1845, 140, 497–514. [Google Scholar] [CrossRef] [Green Version]
- Henkel, T.; Bermig, T.; Kielpinski, M.; Grodrian, A.; Metze, J.; Köhler, J. Chip modules for generation and manipulation of fluid segments for micro serial flow processes. Chem. Eng. J. 2004, 101, 439–445. [Google Scholar] [CrossRef]
- Wuest, W. Strömung durch Schlitz- und Lochblenden bei kleinen Reynolds-Zahlen. Ing. Archiv 1954, 22, 357–367. [Google Scholar] [CrossRef]
- Malsch, D.; Kielpinski, M.; Gleichmann, N.; Mayer, G.; Henkel, T. Reconstructing the 3D shapes of droplets in glass microchannels with application to Bretherton’s problem. Exp. Fluids 2014, 55, 1841. [Google Scholar] [CrossRef]
- Coca, N. A Classical Least Squares Method for Quantitative Spectral Analysis with Python. Towards Data Science. 13 April 2020. Available online: https://towardsdatascience.com/classical-least-squares-method-for-quantitative-spectral-analysis-with-python-1926473a802c (accessed on 26 May 2021).









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Unit |
|---|---|---|
| L | Length | mm |
| V | volume | µL |
| p | pressure | mPa |
| Δp | pressure difference | mPa |
| R | hydrodynamic resistance | mPa s/µL |
| Q | volume flow rate | µL/s |
| Model Flow Rate [µL/s] | Predicted Pressure [mbar] | ||||||||
|---|---|---|---|---|---|---|---|---|---|
| Set | ID 1 | P1 | P2 | P3 | P5 | P1 | P2 | P3 | P5 |
| 1 | 1 | 0.08 | 0.16 | 0.16 | 0.16 | 50.568 | 98.783 | 98.925 | 98.797 |
| 1 | 2 | 0.16 | 0.16 | 0.16 | 0.16 | 98.980 | 99.142 | 99.284 | 99.156 |
| 1 | 3 | 0.32 | 0.16 | 0.16 | 0.16 | 195.806 | 99.860 | 100.003 | 99.874 |
| 1 | 4 | 0.64 | 0.16 | 0.16 | 0.16 | 389.457 | 101.297 | 101.439 | 101.311 |
| 1 | 5 | 1.28 | 0.16 | 0.16 | 0.16 | 776.759 | 104.170 | 104.312 | 104.184 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Böke, J.S.; Kraus, D.; Henkel, T. Microfluidic Network Simulations Enable On-Demand Prediction of Control Parameters for Operating Lab-on-a-Chip-Devices. Processes 2021, 9, 1320. https://doi.org/10.3390/pr9081320
Böke JS, Kraus D, Henkel T. Microfluidic Network Simulations Enable On-Demand Prediction of Control Parameters for Operating Lab-on-a-Chip-Devices. Processes. 2021; 9(8):1320. https://doi.org/10.3390/pr9081320
Chicago/Turabian StyleBöke, Julia Sophie, Daniel Kraus, and Thomas Henkel. 2021. "Microfluidic Network Simulations Enable On-Demand Prediction of Control Parameters for Operating Lab-on-a-Chip-Devices" Processes 9, no. 8: 1320. https://doi.org/10.3390/pr9081320
APA StyleBöke, J. S., Kraus, D., & Henkel, T. (2021). Microfluidic Network Simulations Enable On-Demand Prediction of Control Parameters for Operating Lab-on-a-Chip-Devices. Processes, 9(8), 1320. https://doi.org/10.3390/pr9081320