Abstract
A shape optimization method is used to study the exterior Bernoulli free boundary problem. We minimize the Kohn–Vogelius-type cost functional over a class of admissible domains subject to two boundary value problems. The first-order shape derivative of the cost functional is recalled and its second-order shape derivative for general domains is computed via the boundary differentiation scheme. Additionally, the second-order shape derivative of J at the solution of the Bernoulli problem is computed using Tiihonen’s approach.
Classification: MSC:
35R35; 35N25; 49K20; 49Q10
1. Introduction
Nowadays many researchers are interested in a class of boundary value problems called free boundary problems. These are mostly partial differential equations to be solved for both unknown state function(s) and an unknown domain. It is called “free boundary” because the boundary or part of the boundary of the domain is not known in advance, and usually this terminology is used to indicate that the boundary is stationary and a steady state problem exists. Sometimes this term is used to refer to the so-called moving boundaries. However, moving boundary problems are usually associated to problems that vary with time.
A typical example of the free boundary problem is the melting of a solid that occupies a domain Ω inside a container U. Assuming that the container has a liquid occupying , with an initial temperature distribution , and suppose we can control at any time. Then, knowing these properties, one can reconstruct the solid-liquid configuration and , and the temperature distribution at any time . Ideally, the temperature should satisfy some type of diffusion equation in and , and on the interface some “balance” conditions that would describe the dynamics of the melting process must be satisfied. These “balance conditions” will then define the boundary separating the solid and the liquid. To construct solutions to this type of problems, one can try to build “classical solutions” in the sense that and are smooth, T is smooth up to the boundary , and the interphase conditions on T are satisfied pointwise. For further discussion, see [2].
Free boundary problems are not confined only to the study of phase transitions, such as that of solidification or melting of a particular material, or to the study of fluid dynamics. They also arise in the study of image development in electrophotography, chemical vapor deposition, and tumor growth [3]. Due to their remarkably wide range of new and challenging applications in real life, they are being extensively studied in other disciplines such as combustion, electrochemical machining, molecular diffusion, steel and glass production, and flame propagation, among others [2,4,5,6,7].
This paper studies a class of two-dimensional free boundary problems of Bernoulli type. This class of problems has applications to electrochemical machining, fluid mechanics, optimal insulation, electrical impedance tomography, among others [2,3,5,6,7,8]. In this paper, we are interested in the exterior Bernoulli problem (BP), which can be described as follows: Given a bounded and connected domain with a fixed boundary and a constant , one needs to find a bounded connected domain with a free boundary Σ and containing the closure of A, and an associated state function , where , such that the following conditions are met:
where refers to the outward unit normal vector to Σ. Details about the exterior Bernoulli problems can be seen, for instance, in [4,6,9,10,11,12,13,14,15]. The presence of overdetermined conditions on Σ makes the problem difficult to solve. Shape optimization method, however, is an established tool in solving such problems. One way to reformulate the problem is as follows:
over all admissible domains Ω, where the state function is the solution to the Dirichlet problem:
and the state function is the solution to the Neumann problem:
The functional J is sometimes called Kohn–Vogelius (KV) cost functional because Kohn and Vogelius were among the first to use it in the context of inverse conductivity problems [16]. The idea behind this formulation is that any domain at which the KV functional vanishes is a solution of the Bernoulli problem and vice versa.
Minimizing a shape functional requires, most of the time, some gradient information and Hessian. The first-order shape derivative of KV functional has already been carried out (cf. [17,18]). We have done it in two different ways. One is through variational means similar to the techniques developed in [12,13,19], wherein we use the Hölder continuity of the state variables satisfying the Dirichlet and Neumann problems but we do not introduce any adjoint variables. The other is by using the shape or material derivatives of the states in a rigorous manner (cf. [20]). In [17], the authors used the KV functional for the numerical solution of the Bernoulli problem but restricted to starlike domains, while the authors in [4] considered it in general domains. The second-order shape derivative was also computed in [21] using the approach by Sokolowski and Zolesio [22] and by domain differentiation technique. This is also different from the work of Eppler and Harbrect (cf. [17,23]) where computation is restricted only to starlike shapes. Material derivatives, as well as shape derivatives of the state variables, are highly involved in the approach that we used.
2. Outline of the work
The rest of the paper is outlined as follows:
Section 3 provides a list of tools that are needed in the analysis for the shape derivatives of the Kohn-Vogelius cost functional. Here we describe the reference domain and the perturbed domains that are considered in the work. We introduce the perturbation of identity operator and prove several properties of it. Since we study functions living in different domains, this section also discusses the method of mapping, from which the concepts of material and shape derivatives arise. The domain and boundary transformation formulas, and several formulas in tangential calculus are provided in this section. Also, a discussion on the structure of the second order Eulerian derivative of a general shape functional is presented.
Using the tools presented in Section 3, our main contribution for the second-order shape derivative of J is being discussed in Section 4. The derivation is done on a formal manner. In this section, we recall the domain which is needed in characterizing the second order Eulerian derivative of J. But first we provide results on the shape and material derivatives of , τ and κ. These, together with the material and shape derivatives of the states, are used in the computation of the second-order shape derivative of J. The approach used in computing is based on a method which make use of boundary differentiation formula that is taken from [24]. Though it is not yet established the advantage of using this method from that of Sokolowski and Zolesio [22], this method has a gain over the domain differentiation approach presented in [21]. First, it does not require the use of Stoke’s theorem and second, most of the tools used are tangential calculus results. We show that the computed shape derivative has a symmetric and nonsymmetric part, and in general it satisfies a structure theorem. Finally, the second-order Eulerian derivative of J at the solution of the Bernoulli problem is discussed using the Tiihonen’s approach [1], wherein the general explicit expression of the second-order shape derivative is not used. We compared this to the result wherein the explicit form is utilized.
3. Preliminaries
3.1. Properties of the Perturbation of Identity Operator
In this work we consider two-dimensional bounded connected domains Ω of class , , that are subsets of a hold-all domain U. Moreover, Ω is an annulus having an inner fixed boundary Γ that is disjoint from an external free boundary Σ. The vector fields considered in the paper are those belonging to the space Θ defined by
The domain Ω is deformed using the perturbation of identity operator
where For , we have the reference domain , with a fixed boundary and a free boundary . For a given we denote the deformed domain to be , with a fixed boundary and a free boundary .
We use the following notations in our work:
The determinant has the following property, which is used to prove the next theorem.
Lemma 1 ([12,19]). Consider the operator defined by Equation (6), where , which is described by Equation (5). Then
- , and
- there exists such that , for .
Theorem 1 ([18]). Let Ω and U be nonempty bounded open connected subsets of with Lipschitz continuous boundaries, such that , and is the union of two disjoint boundaries Γ and Σ. Let be defined as in Equation (6) where belongs to Θ, defined by Equation (5). Then for sufficiently small t,
- is a homeomorphism,
- is a diffeomorphism, and in particular, is a diffeomorphism,
- , and .
Here are some properties of that are relevant to our work.
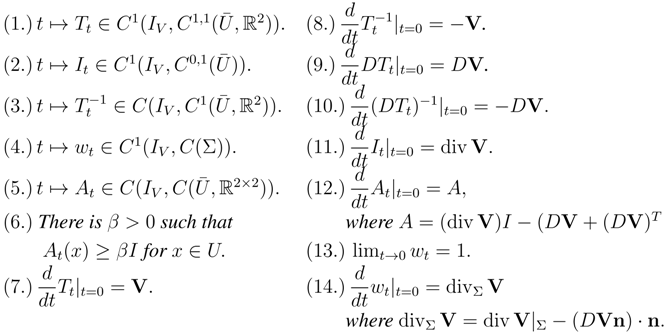
Lemma 2 ([12,19]). Consider the transformation , where the fixed vector field belongs to Θ, defined in Equation (5). Then there exists such that and the functions in Equation (7) restricted to the interval have the following regularity and properties:
We perturb the reference domain twice to discuss the second-order shape derivative of the functional. We define the transformations and by and where , but for simplicity, we denote the transformation in the direction and . Using Theorem 1, the mapping , defined by
is a diffeomorphism. We now define the perturbed domain as:
Hence, for sufficiently small t and s, , and they are contained in U. The new free boundary after two deformations becomes
and clearly . We emphasize that should not be thought of as the domain obtained through deforming the initial domain Ω in the direction of the resultant vector field . The latter perturbed domain is defined by , while elements of are given by Equation (8). In general , as shown in Figure 1. In particular, if , we get for ,
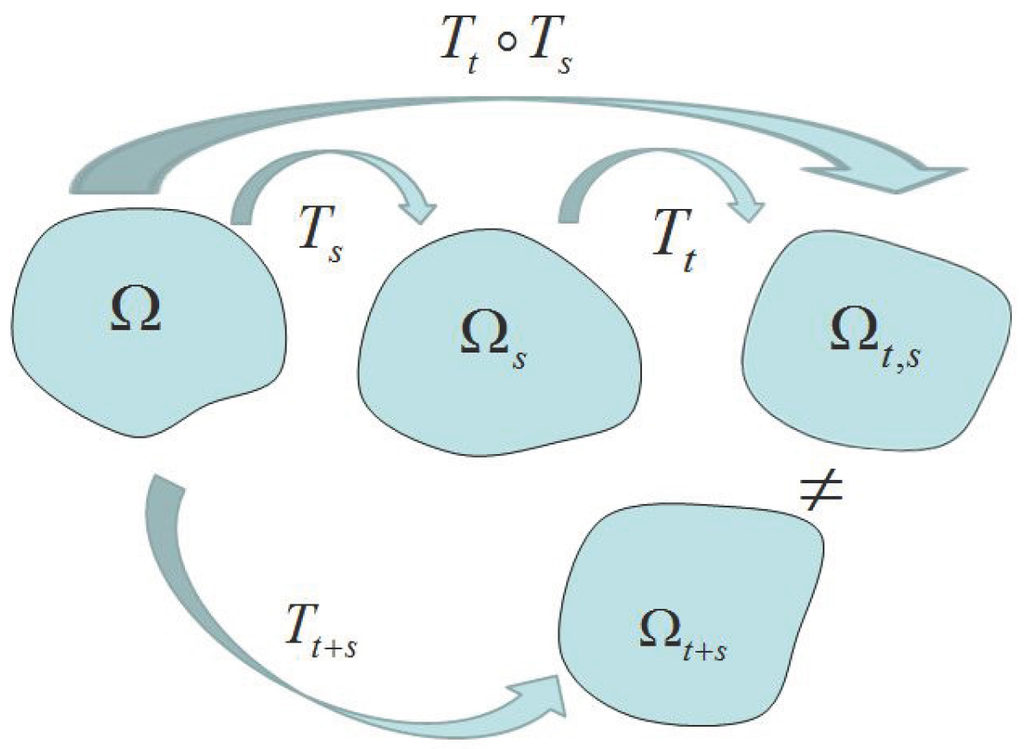
Figure 1.
The difference between domains and .
3.2. Concepts in the Method of Mapping
Definition 1 ([1,25]). Let u be defined in . An element , called the material derivative of u, is defined as
if the limit exists (in ).
Definition 2. Let u be defined in . An element is called the shape derivative of u at Ω in the direction , if the following limit exists in :
Remark 1. As noted in [21], the material and shape derivative of vector-valued functions can also be defined. Similar to Definition 1, if belongs to then its material derivative in the direction can be written as
whenever the limit exists (in ). If its shape derivative also exists then the following relation holds:
If then its norm is given by for .
Lemma 3 ([19,22], Domain and Boundary Transformations).
- Let . Then and
Definition 3 ([22,24,26,27]).
- The tangential gradient of is given by
- The tangential Jacobian matrix of a vector function is given by
- The tangential divergence of a vector function on Γ is given bywhere and are any corresponding extensions of f and into a neighborhood of Γ.
Lemma 4 ([22]). Consider a domain Ω with boundary . Then for and the following identities hold:
Remark 2. In Lemma 4, the first identity is called the tangential divergence formula, the second is commonly known as the tangential Stoke’s formula, and the third is referred to as the tangential Green’s formula. These formulas are also valid for domains.
The following is also another version of the tangential Green’s formula.
Lemma 5 ([12,28]). Let U be a bounded domain of class and with boundary Γ. Also, consider and . Then
Theorem 2 ([22], Boundary Differentiation Formula). Let u be defined in a neighborhood of a boundary of a domain Ω. If and , then
where κ is the mean curvature of the free boundary Σ.
Definition 4.
- The first-order Eulerian derivative of a shape functional at the domain Ω in the direction of the deformation field is given byif the limit exists.
- The second-order Eulerian derivative of J at the domain Ω in the direction of the deformation fields and is given byif the limit exists. Here, is defined by Equation (9).
Remark 3. J is said to be shape differentiable at Ω if exists for all and is linear and continuous with respect to . It is twice shape differentiable if for all and , exists and if is bilinear and continuous with respect to and .
3.3 Anatomy of the Second-Order Shape Derivative
Using the perturbation of identity, one can decompose the expression into symmetric and non-symmetric terms (cf. [24], p. 384). The non-symmetric part is obtained from the first-order shape derivative applied to the deformation field . This is investigated by Novruzi and Pierre [29] by using the perturbation of identity technique presented in [28,30]. The structure of the shape derivative of functional J uses the fact that any regular small perturbation of a smooth domain Ω (where θ is a sufficiently smooth mapping from to ) can be uniquely represented up to a “shift" on Γ by a normal deformation to Γ. For completeness, we give some details of it, which is taken from [29].
For any , we denote
Lemma 6. Let Ω denote a bounded domain with boundary Γ. Then for any
- (i)
- there exists an open neighborhood of 0 inand functions and such that for any ,
- (ii)
- Moreover, the values of the first- and second-order (Fréchet) derivatives of Ψ at in the directions are given by
- (a)
- , and
- (b)
- for , where and .
The implicit function theorem is used to prove the lemma. Consequently, this lemma is used to prove the next result, where refers to the set of bounded domains.
Theorem 3. [29, p.368] Consider the shape functional and the functional where
For , the following statements hold.
- (i)
- If and is differentiable at 0 in , then there is a continuous linear map such that for any ,
- (ii)
- If and is twice differentiable at 0 in then there exists a continuous bilinear symmetric map such that for any we have
Here, and are restrictions of and on Γ, respectively.
4. Main Results
We now present the shape derivative method that we used in obtaining the second-order shape derivative of the Kohn–Vogelius functional J. This time, we assume that the domains, deformation vectors, the state variables and the rest of the functions involved are regular enough. We use material and shape derivatives of the states and , as well as the material and shape derivatives of , τ and κ. Additional tools on tangential calculus are used in the simplification. Steklov–Poincaré operators are also introduced in the discussion.
Throughout the discussion, we let and , where the vector is the tangential component of and the scalar is referred to as its normal component. We remark here that for a given scalar function f and vector function defined on the free boundary Σ, the gradient , the Jacobian and divergence refer actually to the gradient, Jacobian, and divergence of their respective extensions defined on a neighborhood of Σ. For , we consider a unitary extension , which gives and .
Our main result requires the following theorems, which are stated and proven in [21,22,24].
Theorem 4. The material derivative and shape derivative of the outward unit normal vector at the boundary Σ in the direction of the deformation field are given by
Theorem 5. The material derivative and shape derivative of the mean curvature κ of the free boundary Σ in the direction of the deformation field are given by
Theorem 6. The material derivative and shape derivative of the unit tangent vector τ on the boundary Σ in the direction of the deformation field are given by
In addition to the tools given in the preliminary section, we present some identities in tangential calculus that are significant to our work on the second-order shape derivative of J.
First we observe that
Second, we observe that
This follows from , Equation (37), and the definition of curvature. Here are the other results that are useful to our work (cf. [24]).
Lemma 7. Consider two deformation fields and that are sufficiently smooth on a neighborhood of Σ, and let and . Let and . Then the following identities hold:
Let us now recall the first-order shape derivative of J, which was proven in [18,20].
Theorem 7. For a bounded domain Ω, the first-order shape derivative of the Kohn–Vogelius cost functional
in the direction of a perturbation field , where Θ is defined by Equation (5) and the state functions and satisfy the Dirichlet problem Equation (3) and the Neumann problem Equation (4) respectively, is given by
where is the unit exterior normal vector to Σ, τ is a unit tangent vector to Σ, and κ is the mean curvature of Σ.
4.1 Second-Order Shape Derivative of KV by Boundary Differentiation
We are interested in computing the second-order shape derivative of the Kohn–Vogelius functional in its explicit form at Ω in the directions and using the boundary differentiation formula given by Equation (21). Assuming that the second-order shape derivative of J exists for all deformation fields and , then by definition exists for all sufficiently small s. We start the computation by using Definition 4.
where the function is defined by
and the deformation fields and are assumed to belong in Θ defined by Equation (5). Applying Equation (21) and the definition of shape derivative we obtain
where is given by Equation (32) and (cf. [21]) is given by
and are given by equations (34) and (36), respectively. As shown in [20], and correspondingly satisfy
and
Following [24] and by using Equation (32) we now evaluate the second integral of Equation (46) as follows
Let us compute the first integral in Equation (50). Let
By applying property of Lemma 7 to Equation (51) we obtain
Thus, can now be written as
After substituting Equation (41) into Equation (53) and arranging the terms, we have
Using property of Lemma 7 we obtain:
Using the following identities
we obtain:
Inserting into Equation (54) one arrives at
Replacing the second integral in Equation (46) by the expression Equation (56) and affixing the constant to the integrals, we obtain the second-order shape derivative of J:
where is given by equation (47) and F is given by
This derivative coincides with the result obtained by using the approach of Sokolowski and Zolesio [22] and a domain differentiation approach (cf. [21]). Furthermore, this derivative can be shown to be a sum of symmetric and non-symmetric part in agreement with Equation (30):
where Finally, this can be expressed explicitly as
where S and R are the Steklov–Poincaré operators (cf. [1,31]) defined, respectively, by
where solves
and
where satisfies
See [21] for more discussions.
4.2 Shape Derivative at the Solution of the Bernoulli Problem
At the solution of the Bernoulli problem, we have the following result
Theorem 8. If is such that , where and satisfy the Dirichlet problem Equation (3) and the Neumann problem Equation (4), respectively, then the first- and second-order shape derivatives of the Kohn–Vogelius cost functional J defined by
are given by
We provide the proof by following closely Tiihonen’s work [1]. The idea is to decompose the first-order shape derivative of J and we differentiate each term by employing the same techniques that are used in deriving the first-order shape derivative.
Proof. We begin the proof by rewriting the first-order shape derivative Equation (43) as
Clearly, for , Equation (64) vanishes. Now, we differentiate the expression Equation (64) term by term in the direction of the deformation field . First, for , because , . Furthermore, because vanishes on Γ, by applying the Stoke’s formula we obtain
We then apply the domain differentiation formula Equation (21) to the domain integral Equation (65) to obtain
Here, is the shape derivative of at Ω in the direction , satisfying Equation (48). We apply the Steklov–Poincaré operator S. We use the Stoke’s theorem for the second time and consider on Γ to get
At the solution, we have
Note that
for sufficiently smooth function g and vector field . Applying this property of divergence, we write as
Now, let us compute . By writing in terms of its normal and tangential components we obtain
where is the tangential component of on Σ and is the tangential gradient on Σ. Using Equation (68), can now be written as
Because , we have
Thus, simplifies to
One can show that . This implies that
Thus, at the solution of the Bernoulli problem, we have
Combining Equations (69) and (66), we write as
Next, we differentiate using Equation (21):
where satisfies Equation (49). At the solution, we obtain
which is expressed in terms of integrals A and B. Applying the Steklov–Poincaré operator to at the solution of the Bernoulli problem we obtain Thus we write A as
Computing B we have
Thus, at the solution we obtain
Therefore, by combining Equations (72) and (73) we have
Finally for , we compute its derivative in the direction in a manner similar to that in computing . Applying the identity and the Stoke’s formula, we obtain
Differentiating in the direction by using Equation (21), we get
can be written as
At the solution, we have
Since is zero at the solution, equation (75) can be simplified as
Next, we write as
At the solution, on Σ. Thus, we have
We further simplify this as follows
Since at the solution, it follows that
Combining Equations (76) and (77), we get
Therefore, the second-order shape derivative of J is just the sum of equations (70) and (73):
Simplifying, we obtain equation (63). This completes the proof. Because S is bijective and symmetric, it follows that at the solution of the Bernoulli problem is symmetric.
Remark 4. The result can also be obtained using the explicit form Equation (58). Note that, at the solution of the Bernoulli problem, we have , and because on Σ. Hence,
which implies that Thus, the last two integrals in Equation (58) vanish and we write the remaining integrals as
vanishes because on Σ. At the solution, , and so can be simplified as follows:
We also note that at the solution, , so is simplified as
Furthermore, for , we have on Σ. Hence, and do not contribute at all. Lastly, can be simplified as
Therefore, at the solution of the Bernoulli problem, simplifies to
This result is given in [21] and we see that it coincides with the result given in this paper.
Acknowledgment
The output was made possible through the support of ÖAD – Austrian Agency for International Cooperation in Education and Research for the Technologiestipendien Südostasien (Doktorat) scholarship in the frame of the ASEA-UNINET. The output was also made possible through the support of SFB Research Center Mathematical Optimization and Applications in Biomedical Sciences SFB F32.
Author Contributions
JBB wrote the paper. GP contributed in the understanding of the concepts involved in this research, and contributed to all the steps in the proof of the main results.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Tiihonen, T. Shape optimization and trial methods for free boundary problems. RAIRO—Model. Math. Anal. Numer. 1997, 31, 805–825. [Google Scholar]
- Caffarelli, L.A.; Salsa, S. A Geometric Approach to Free Boundary Problems; American Mathematical Society: Providence, RI, USA, 2005. [Google Scholar]
- Friedman, A. Free boundary problems in science and technology. Not. AMS 2000, 47, 854–861. [Google Scholar]
- Abda, B.; Bouchon, F.; Peichl, G.; Sayeh, M.; Touzani, R. A Dirichlet-Neumann cost functional approach for the Bernoulli problem. J. Eng. Math. 2013, 81, 157–176. [Google Scholar] [CrossRef]
- Crank, J. Free and Moving Boundary Problems; Oxford University Press Inc.: New York, NY, USA, 1984. [Google Scholar]
- Flucher, M.; Rumpf, M. Bernoulli’s free-boundary problem, qualitative theory and numerical approximation. J. Reine Angew. Math. 1997, 486, 165–204. [Google Scholar]
- Toivanen, J.I.; Haslinger, J.; Mäkinen, R.A.E. Shape optimization of systems governed by Bernoulli free boundary problems. Comput. Methods Appl. Mech. Eng. 2008, 197, 3803–3815. [Google Scholar] [CrossRef]
- Eppler, K.; Harbrecht, H. A regularized Newton method in electrical impedance tomography using shape Hessian information. Control Cybern. 2005, 34, 203–225. [Google Scholar]
- Aparicio, N.D.; Pidcock, M.K. On a class of free boundary problems for the Laplace equation in two dimensions. Inverse Probl. 1998, 14, 9–18. [Google Scholar] [CrossRef]
- Beurling, A. On free boundary problems for the Laplace equation. In Proceedings of the Seminars on Analytic Functions; 1957; pp. 248–263. [Google Scholar]
- Cardaliaguet, P.; Tahraoui, R. Some uniqueness results for Bernoulli interior free-boundary problems in convex domains. Electron. J. Diff. Equ. 2002, 2002, 1–16. [Google Scholar]
- Haslinger, J.; Ito, K.; Kozubek, T.; Kunisch, K.; Peichl, G. On the shape derivative for problems of Bernoulli type. Interfaces Free Bound. 2009, 1, 317–330. [Google Scholar] [CrossRef]
- Haslinger, J.; Kozubek, T.; Kunisch, K.; Peichl, G. Shape optimization and fictitious domain approach for solving free-boundary value problems of Bernoulli type. Comput. Optim. Appl. 2003, 26, 231–251. [Google Scholar] [CrossRef]
- Henrot, A.; Shahgholian, H. Convexity of free boundaries with Bernoulli type boundary condition. Nonlinear Anal. Theory Methods Appl. 1997, 28, 815–823. [Google Scholar] [CrossRef]
- Tepper, D.E. A free boundary problem in an annulus. J. Aust. Math. Soc. A 1983, 34, 177–181. [Google Scholar] [CrossRef]
- Kohn, R.; Vogelius, M. Determining conductivity by boundary measurements. Commun. Pure Appl. Math. 1984, 37, 289–298. [Google Scholar] [CrossRef]
- Eppler, K.; Harbrecht, H. On a Kohn-Vogelius like formulation of free boundary problems. Comput. Optim. Appl. 2012, 52, 69–85. [Google Scholar] [CrossRef]
- Bacani, J.B.; Peichl, G. On the first-order shape derivative of the Kohn-Vogelius cost functional of the Bernoulli problem. Abstr. Appl. Anal. 2013, 2013. [Google Scholar] [CrossRef]
- Ito, K.; Kunisch, K.; Peichl, G. Variational approach to shape derivatives for a class of Bernoulli problems. J. Math. Anal. Appl. 2006, 314, 126–149. [Google Scholar] [CrossRef]
- Bacani, J. B.; Peichl, G. Solving the exterior Bernoulli problem using the shape derivative approach. In Mathematics and Computing 2013: Springer Proceedings in Mathematics and Statistics, Vol.91; Mohapatra, R., Giri, D., Saxena, P.K., Srivastava, P.D., Eds.; Springer India: New Delhi, India, 2014; Volume XXV, pp. 251–269. [Google Scholar]
- Bacani, J.B.; Peichl, G. The second-order Eulerian derivative of a shape functional of a free Bernoulli problem. J. Korean Math. Soc. 2014. submitted for publication. [Google Scholar]
- Sokolowski, J.; Zolesio, J.P. Introduction to Shape Optimization; Springer-Verlag: Berlin/Heidelberg, Germany, 1991. [Google Scholar]
- Eppler, K. Boundary integral representations of second derivatives in shape optimization. Discuss. Math. (Diff. Incl. Control Optim.) 2000, 20, 63–78. [Google Scholar] [CrossRef]
- Delfour, M.C.; Zolesio, J.P. Shapes and Geometries; SIAM: Philadelphia, PA, USA, 2001. [Google Scholar]
- Haslinger, J.; Mäkinen, R.A.E. Introduction to Shape Optimization (Theory, Approximation, and Computation); SIAM Advances and Control: Philadelphia, PA, USA, 2003. [Google Scholar]
- Afraites, L.; Dambrine, M.; Kateb, D. On second-order shape optimization methods for electrical impedance tomography. SIAM J. Control Optim. 2008, 47, 1556–1590. [Google Scholar] [CrossRef]
- Henrot, A.; Pierre, M. Variation et Optimisation de Formes; Springer-Verlag: Berlin/Heidelberg, Germany, 2005. [Google Scholar]
- Murat, F.; Simon, J. Sur le Contrôle par un Domaine Géométrique; Rapport 76015; University Pierre et Marie Curie: Paris, France, 1976. [Google Scholar]
- Novruzi, A.; Pierre, M. Structure of shape derivatives. J. Evol. Equ. 2002, 2, 365–382. [Google Scholar] [CrossRef]
- Simon, J. Differentiation with respect to the domain in boundary value. Numer. Funct. Anal. Optim. 1980, 2, 649–687. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, S. Preconditioning the Poincaré- Steklov operator by using Green’s function. Math. Comput. 1997, 31, 125–138. [Google Scholar] [CrossRef]
© 2014 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).