

Zhang Neuro-PID Control for Generalized Bi-Variable Function Projective Synchronization of Nonautonomous Nonlinear Systems with Various Perturbations


Abstract
1. Introduction
- (1)
- A new synchronization type, namely GBVFPS, is proposed. The scaling factor of GBVFPS is a bi-variable scaling function matrix, marking a significant progress and breakthrough in the field of synchronization research.
- (2)
- Unlike existing studies, this paper investigates the synchronization of NN systems with six different perturbations. By designing a novel Zhang neuro-PID controller, an effective and anti-perturbation GBVFPS control method is proposed.
- (3)
- Rigorous theoretical analyses are provided to prove the convergence performance and anti-perturbation ability of the GBVFPS control method, especially its ability to suppress six different perturbations.
- (4)
- Two representative numerical simulations and comparisons further substantiate the effectiveness, superiority, and anti-perturbation ability of the proposed GBVFPS control method.
2. Preliminaries
3. GBVFPS Control and Theoretical Analyses
3.1. GBVFPS Control
3.2. Theoretical Analyses
4. Numerical Simulations and Comparisons
4.1. Chaotic System Synchronization Example
- (1)
- (2)
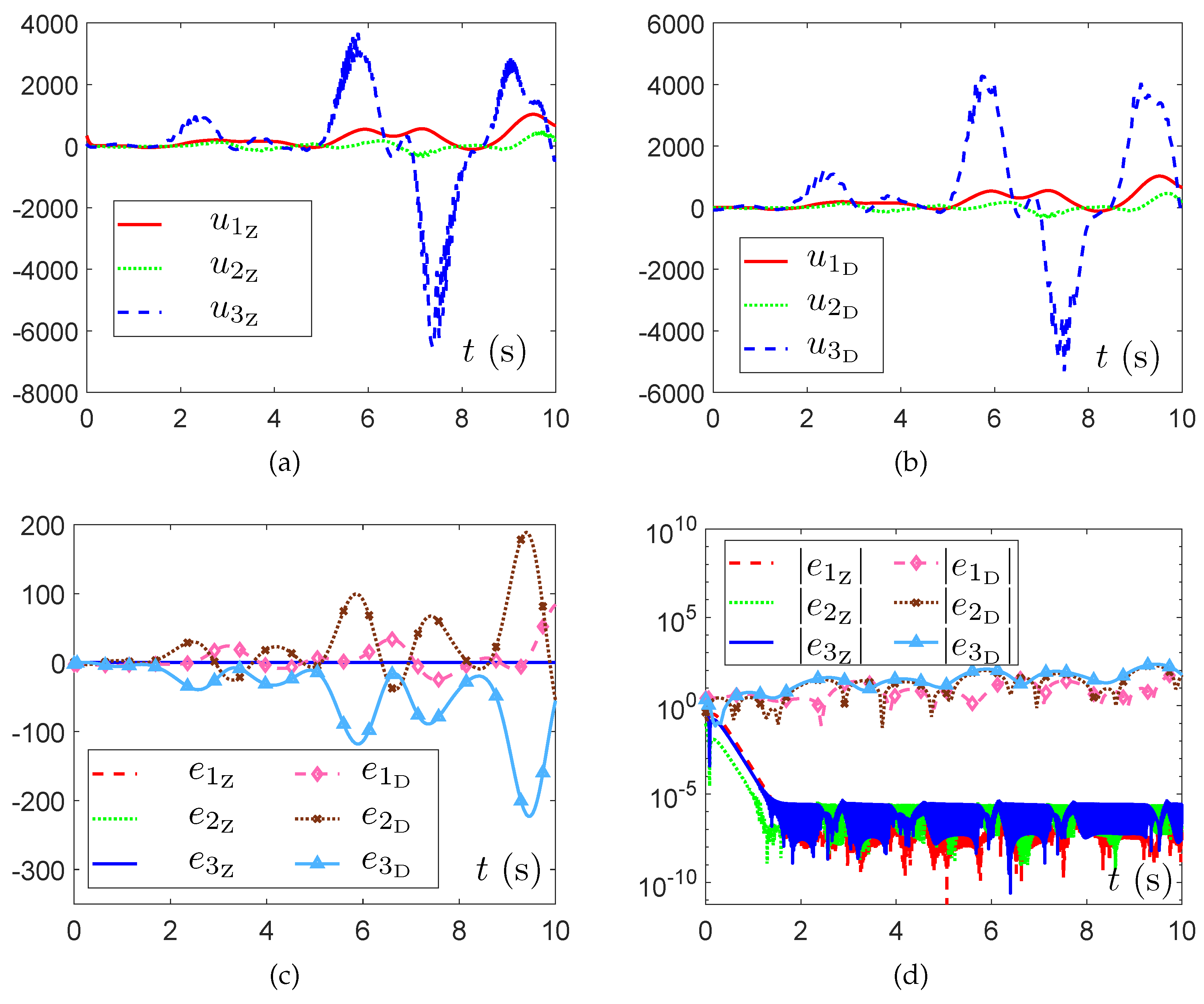
- Consider the bounded constant perturbation, i.e., , , , , , and . The corresponding numerical simulation results are displayed in Figure 5a,b.
- (3)
- Consider the linear-form MTVP , where and stand for constant vectors. In this case, the linear-form MTVP is expressed asThe simulation results are shown in Figure 5c,d.
- (4)
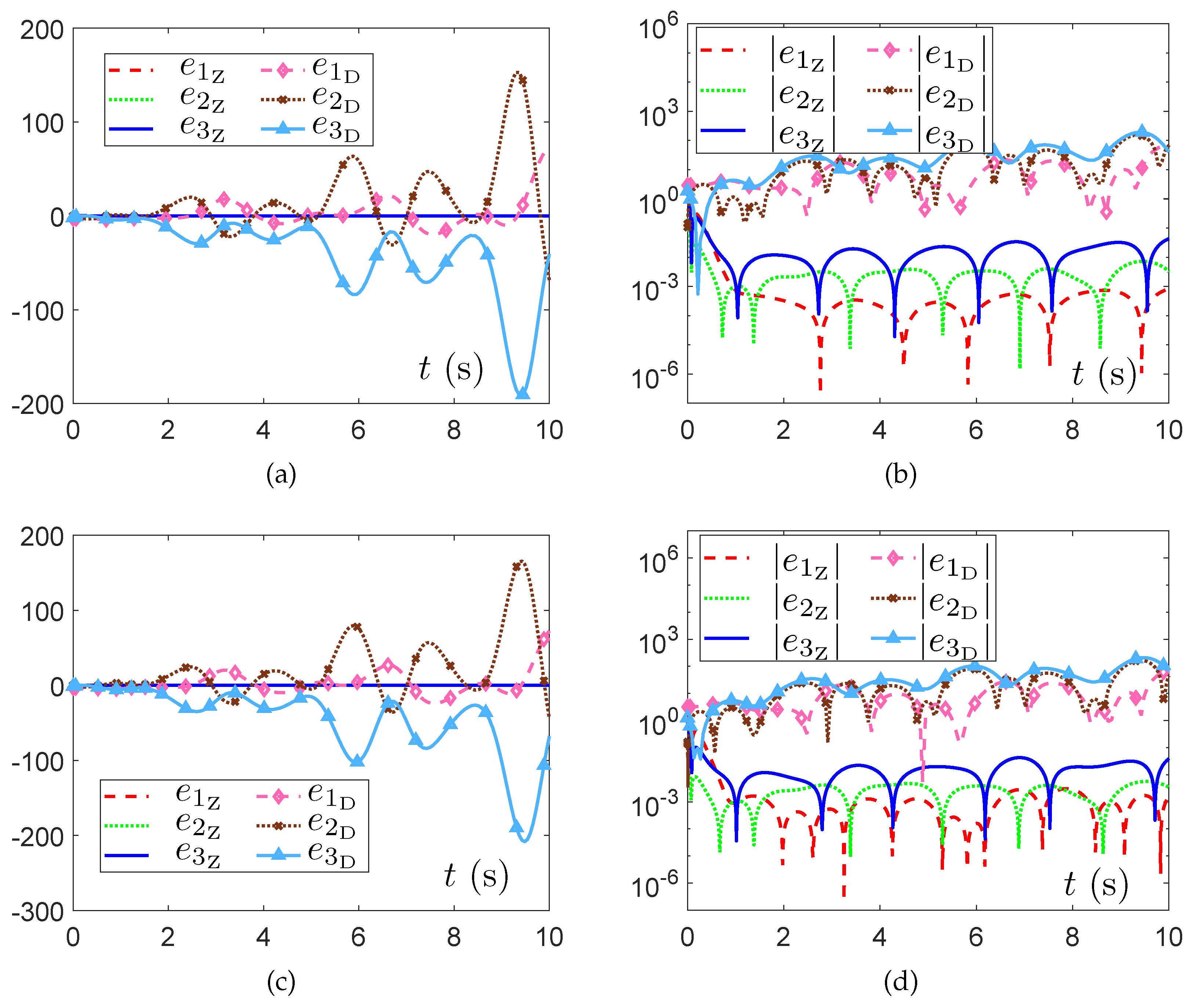
- Consider the exponential-form MTVP , where and are constant vectors and . In this case, the exponential-form MTVP is considered asThe simulation results are displayed in Figure 6a,b.
- (5)
- Consider the sine-form MTVP , where . In this case, the sine-form MTVP is considered asThe simulation results are exhibited in Figure 6c,d.
- (6)
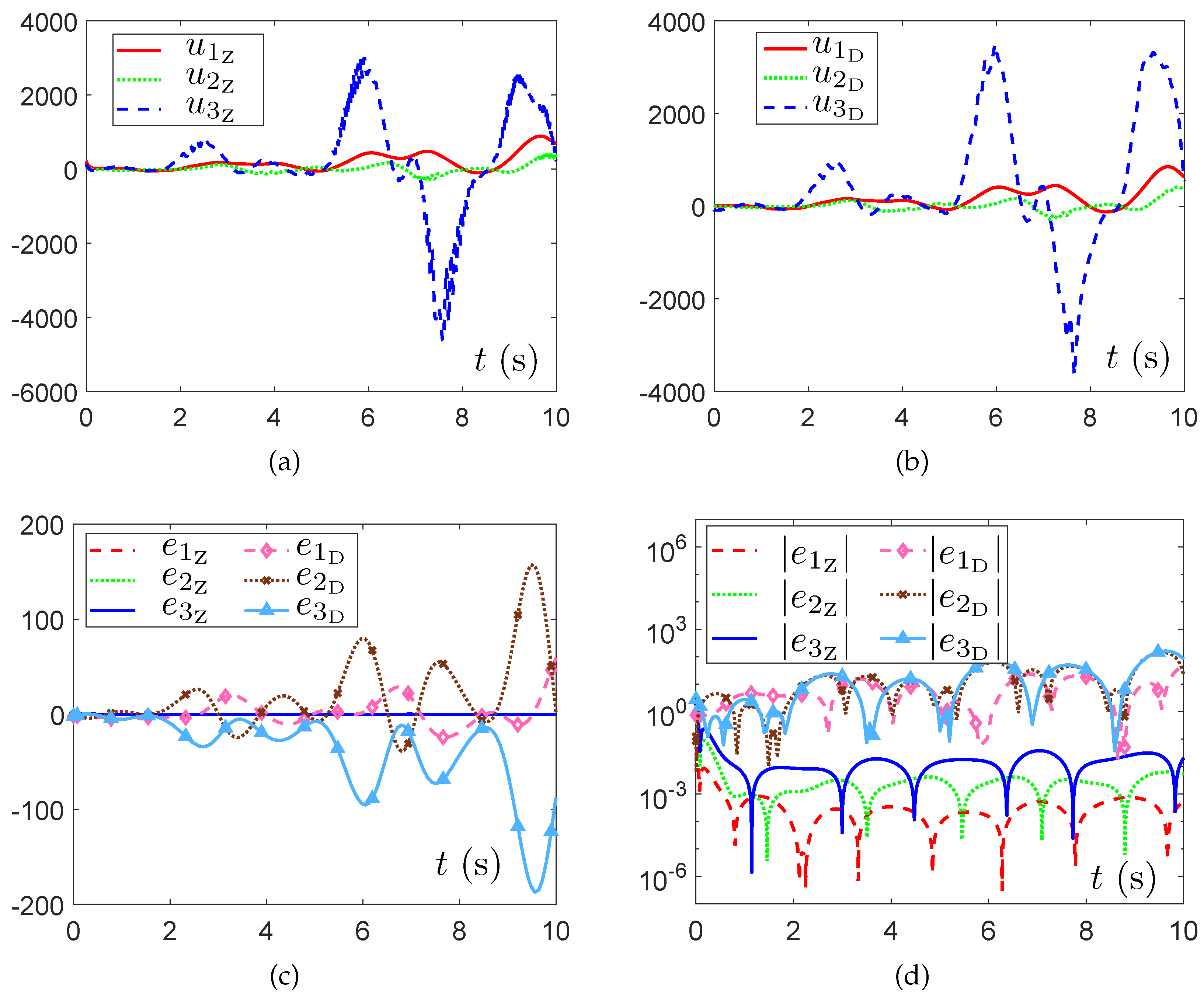
- Consider the exponential-sine-form MTVP . In this case, the exponential-sine-form MTVP is considered asThe simulation results are shown in Figure 7.
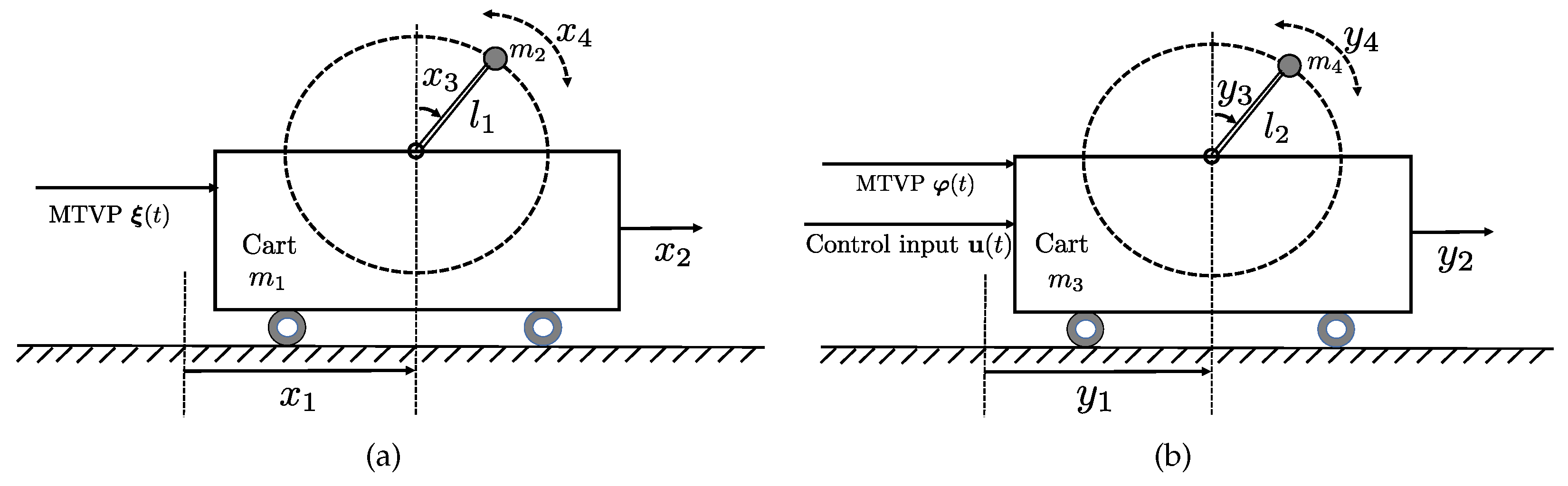
4.2. FDVIP System Synchronization Example
- (1)
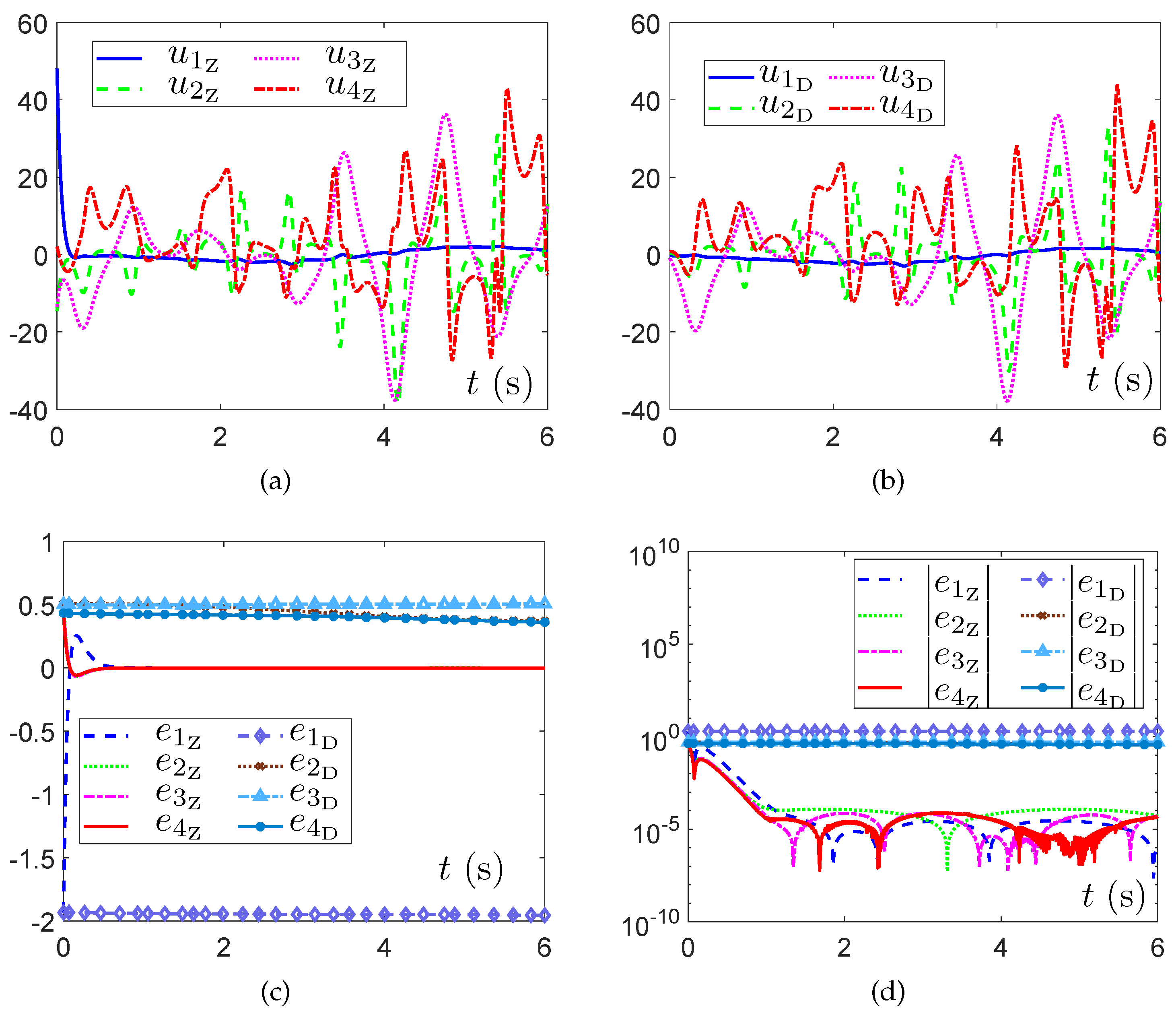
- Considering the bi-variable scaling function factors being constant factors—that is, , , , and . In this situation, the GBVFPS turns into MPS and the corresponding simulation results are presented in Figure 10.
- (2)
- Consider the bi-variable scaling function factors being related to t, which are expressed asIn this situation, the GBVFPS becomes MFPS and the corresponding simulation results are given in Figure 11.
- (3)
- Consider the bi-variable scaling function factors being related to , which are constructed asIn this situation, the GBVFPS is changed into GFPS and the corresponding simulation results are displayed in Figure 12.
- (4)
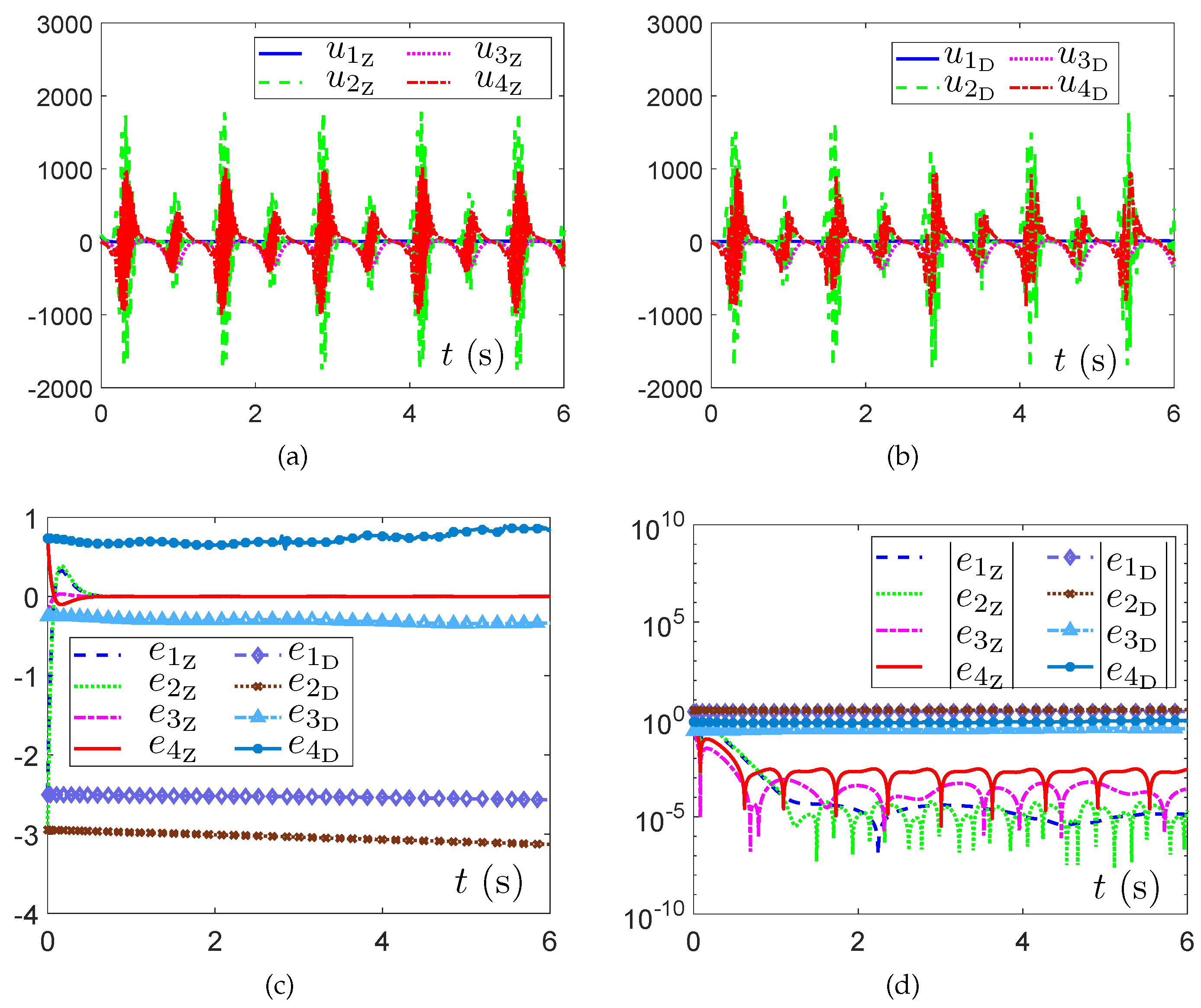
- Considering the bi-variable scaling function factors being related to t and , which are formulated asIn this situation, the synchronization type becomes GBVFPS. By utilizing the proposed GBVFPS control, the corresponding simulation results are exhibited in Figure 13.
5. Conclusions
- (1)
- Designing a different synchronization control method that does not require matrix inversion operation will significantly improve the real-time processing capability.
- (2)
- Conducting more systematic synchronization research and experimental validation in ships, helicopters, robotics, and so on.
- (3)
- Exploring control methods for NN systems with unknown parameters.
- (4)
- Conducting discrete-time synchronization research for better application to computer control.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Liao, B.; Huang, Z.; Cao, X.; Li, J. Adopting nonlinear activated Beetle Antennae Search algorithm for fraud detection of public trading companies: A computational finance approach. Mathematics 2022, 10, 2160. [Google Scholar] [CrossRef]
- Xiao, L.; Zhang, Y.; Hu, Z.; Dai, J. Performance benefits of robust nonlinear zeroing neural network for finding accurate solution of Lyapunov equation in presence of various noises. IEEE Trans. Ind. Inform. 2019, 15, 5161–5171. [Google Scholar] [CrossRef]
- Guo, P.; Zhang, Y. Tracking control for triple-integrator and quintuple-integrator systems with single input using Zhang neural network with time delay caused by backward finite-divided difference formulas for multiple-order derivatives. Mathematics 2022, 10, 1440. [Google Scholar] [CrossRef]
- Su, H.; Luo, R.; Huang, M.; Fu, J. Fast convergence control of a class of uncertain chaotic systems with input nonlinearity by using a new sliding mode controller. Eur. J. Control 2023, 69, 100751. [Google Scholar] [CrossRef]
- Glushkov, A.V.; Buyadzhi, V.V.; Kvasikova, A.S.; Ignatenko, A.V.; Kuznetsova, A.A.; Prepelitsa, G.P.; Ternovsky, V.B. Non-linear chaotic dynamics of quantum systems: Molecules in an electromagnetic field. In Quantum Systems in Physics, Chemistry and Biology; Springer International Publishing: Cham, Switzerland, 2017; pp. 169–180. [Google Scholar]
- Luo, R.; Huang, M.; Su, H. Robust control and synchronization of 3-D uncertain fractional-order chaotic systems with external disturbances via adding one power integrator control. Complexity 2019, 2019, 8417536. [Google Scholar] [CrossRef]
- Verhulst, F. Nonlinear Differential Equations and Dynamical Systems; Springer: Berlin, Germany, 1990. [Google Scholar]
- Arnold, V.I. Geometrical Methods in the Theory of Ordinary Differential Equations; Springer: Berlin, Germany, 1983. [Google Scholar]
- Vedenov, A.A.; Ezhov, A.A.; Levchenko, E.B. Nonlinear dynamical systems with memory and functions of neuron ensembles. In Nonlinear Waves Struct. Bifurc. 1987, 394, 53–69. [Google Scholar]
- Lancelotti, S.; Molle, R. Positive solutions for autonomous and non-autonomous nonlinear critical elliptic problems in unbounded domains. Nonlinear Differ. Equ. Appl. 2020, 27, 8. [Google Scholar] [CrossRef]
- Chen, F.; Xie, X.; Miao, Z.; Pu, L. Extinction in two species nonautonomous nonlinear competitive system. Appl. Math. Comput. 2016, 274, 119–124. [Google Scholar] [CrossRef]
- Lenka, B.K.; Bora, S.N. New asymptotic stability results for nonautonomous nonlinear fractional order systems. IMA J. Math. Control Inf. 2022, 39, 951–967. [Google Scholar] [CrossRef]
- Wang, M.; Ren, X.; Chen, Q. Cascade optimal control for tracking and synchronization of a multimotor driving system. IEEE Trans. Control Syst. Technol. 2019, 27, 1376–1384. [Google Scholar] [CrossRef]
- Huang, M.; Luo, R.; Fu, J.; Su, H. Synchronization of a class of time-varying delay chaotic systems with external disturbances via impulsive intermittent control. Int. J. Control Autom. Syst. 2023, 21, 1507–1517. [Google Scholar] [CrossRef]
- Yau, H.; Wang, C.; Chang, J.; Su, X. A study on the application of synchronized chaotic systems of different fractional orders for cutting tool wear diagnosis and identification. IEEE Access 2019, 7, 15903–15911. [Google Scholar] [CrossRef]
- Volos, C.K.; Kyprianidis, I.M.; Stouboulos, I.N. Image encryption process based on chaotic synchronization phenomena. Signal Process. 2013, 93, 1328–1340. [Google Scholar] [CrossRef]
- Shabunin, A.; Astakhov, V.; Demidov, V.; Provata, A.; Baras, F.; Nicolis, G.; Anishchenko, V. Modeling chemical reactions by forced limit-cycle oscillator: Synchronization phenomena and transition to chaos. Chaos Solitons Fractals 2003, 15, 395–405. [Google Scholar] [CrossRef]
- Hashemi, S.; Pourmina, M.A.; Mobayen, S.; Alagheband, M.R. Design of a secure communication system between base transmitter station and mobile equipment based on finite-time chaos synchronisation. Int. J. Syst. Sci. 2020, 51, 1969–1986. [Google Scholar] [CrossRef]
- Huang, M.; Luo, R.; Fu, J.; Su, H. Robust exponential synchronization of a class of chaotic systems with variable convergence rates via the saturation control. Complexity 2020, 2020, 8293190. [Google Scholar] [CrossRef]
- Su, H.; Luo, R.; Fu, J.; Huang, M. Fixed time control and synchronization of a class of uncertain chaotic systems with disturbances via passive control method. Math. Comput. Simul. 2022, 198, 474–493. [Google Scholar] [CrossRef]
- Tian, Y.P.; Chun, S.; Chen, G.; Zong, S.; Huang, Y.; Wang, B. Delay compensation-based time synchronization under random delays: Algorithm and experiment. IEEE Trans. Control Syst. Technol. 2021, 29, 80–95. [Google Scholar] [CrossRef]
- Tang, Y.; Qiu, R.; Fang, J.; Miao, Q.; Xia, M. Adaptive lag synchronization in unknown stochastic chaotic neural networks with discrete and distributed time-varying delays. Phys. Lett. A 2008, 372, 4425–4433. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, W.; Ren, S.; Zheng, Z. Analysis and pinning control for generalized synchronization of delayed coupled neural networks with different dimensional nodes. J. Frankl. Inst. 2018, 355, 5968–5997. [Google Scholar] [CrossRef]
- Luo, R.; Wang, Y.; Deng, S. Combination synchronization of three classic chaotic systems using active backstepping design. Chaos 2011, 21, 043114. [Google Scholar]
- Boubellouta, A.; Boulkroune, A. Intelligent fractional-order control-based projective synchronization for chaotic optical systems. Soft Comput. 2018, 23, 5367–5384. [Google Scholar] [CrossRef]
- Farivar, F.; Shoorehdeli, M.A.; Nekoui, M.A.; Teshnehlab, M. Synchronization of underactuated unknown heavy symmetric chaotic gyroscopes via optimal Gaussian radial basis adaptive variable structure control. IEEE Trans. Control Syst. Technol. 2013, 21, 2374–2379. [Google Scholar] [CrossRef]
- Botmart, T.; Weera, W.; Hongsri, A.; Yotha, N.; Niamsup, P. Dissipative pinning sampled-data control for function projective synchronization of neural networks with hybrid couplings and time-varying delays. IEEE Access 2022, 10, 58647–58666. [Google Scholar] [CrossRef]
- Tirandaz, H.; Karmi-Mollaee, A. Modified function projective feedback control for time-delay chaotic Liu system synchronization and its application to secure image transmission. Optik 2017, 147, 187–196. [Google Scholar] [CrossRef]
- Yu, Y.; Li, H. Adaptive generalized function projective synchronization of uncertain chaotic systems. Nonlinear Anal. Real World Appl. 2010, 11, 2456–2464. [Google Scholar] [CrossRef]
- Li, J.; Qu, L.; Li, Z.; Liao, B.; Li, S.; Rong, Y.; Liu, Z.; Liu, Z.; Lin, K. A novel zeroing neural network for solving time-varying quadratic matrix equations against linear noises. Mathematics 2023, 11, 475. [Google Scholar] [CrossRef]
- He, Y.; Liao, B.; Xiao, L.; Han, L.; Xiao, X. Double accelerated convergence ZNN with noise-suppression for handling dynamic matrix inversion. Mathematics 2022, 10, 50. [Google Scholar] [CrossRef]
- Su, H.; Luo, R.; Huang, M.; Fu, J. Practical fixed time active control scheme for synchronization of a class of chaotic neural systems with external disturbances. Chaos Solitons Fractals 2022, 157, 111917. [Google Scholar] [CrossRef]
- Yu, F.; Wang, C. Secure communication based on a four-wing chaotic system subject to disturbance inputs. Optik 2014, 125, 5920–5925. [Google Scholar] [CrossRef]
- Jin, L.; Li, S.; Xiao, L.; Lu, R.; Li, B. Cooperative motion generation in a distributed network of redundant robot manipulators with noises. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1715–1724. [Google Scholar] [CrossRef]
- Zhang, Y.; Yi, C. Zhang Neural Networks and Neural-Dynamic Method; Nova Science Publishers: New York, NY, USA, 2011. [Google Scholar]
- Liao, B.; Hua, C.; Cao, X.; Katsikis, V.N.; Li, S. Complex noise-resistant zeroing neural network for computing complex time-dependent Lyapunov equation. Mathematics 2022, 10, 2817. [Google Scholar] [CrossRef]
- Chen, D.; Zhang, Y.; Li, S. Zeroing neural-dynamics approach and its robust and rapid solution for parallel robot manipulators against superposition of multiple disturbances. Neurocomputing 2018, 275, 845–858. [Google Scholar] [CrossRef]
- Ding, Y.; Jia, H.; Zhang, Y.; Qiu, B. High-order modeling, zeroing dynamics control, and perturbations rejection for non-linear double-holding water tank. Mathematics 2023, 11, 2989. [Google Scholar] [CrossRef]
- Zhang, Y.; Shi, N.; Yang, M.; Guo, J.; Chen, J. Output optimization of scalar and 2-dimension time-varying nonlinear systems using zeroing dynamics. Asian J. Control 2021, 23, 1643–1657. [Google Scholar] [CrossRef]
- Liao, B.; Wang, Y.; Li, W.; Peng, C.; Xiang, Q. Prescribed-time convergent and noise-tolerant Z-type neural dynamics for calculating time-dependent quadratic programming. Neural Comput. Appl. 2021, 33, 5327–5337. [Google Scholar] [CrossRef]
- Yan, D.; Li, C.; Wu, J.; Deng, J.; Zhang, Z.; Yu, J.; Liu, P.X. A novel error-based adaptive feedback zeroing neural network for solving time-varying quadratic programming problems. Mathematics 2024, 12, 2090. [Google Scholar] [CrossRef]
- Shi, Y.; Zhang, Y. Discrete time-variant nonlinear optimization and system solving via integral-type error function and twice ZND formula with noises suppressed. Soft Comput. 2018, 22, 7129–7141. [Google Scholar] [CrossRef]
- Sun, Z.; Li, F.; Zhang, B.; Sun, Y.; Jin, L. Different modified zeroing neural dynamics with inherent tolerance to noises for time-varying reciprocal problems: A control-theoretic approach. Neurocomputing 2019, 337, 165–179. [Google Scholar] [CrossRef]
- Xiao, L. Accelerating a recurrent neural network to finite-time convergence using a new design formula and its application to time-varying matrix square root. J. Frankl. Inst. 2017, 354, 5667–5677. [Google Scholar] [CrossRef]
- Zhang, Y.; Ling, Y.; Yang, M.; Yang, S.; Zhang, Z. Inverse-free discrete ZNN models solving for future matrix pseudoinverse via combination of extrapolation and ZeaD formulas. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 2663–2675. [Google Scholar] [CrossRef] [PubMed]
- Lei, Y.; Dai, Z.; Liao, B.; Xia, G.; He, Y. Double features zeroing neural network model for solving the pseudoninverse of a complex-valued time-varying matrix. Mathematics 2022, 10, 2122. [Google Scholar] [CrossRef]
- Chen, J.; Kang, X.; Zhang, Y. Continuous and discrete ZND models with aid of eleven instants for complex QR decomposition of time-varying matrices. Mathematics 2023, 11, 3354. [Google Scholar] [CrossRef]
- Zhang, Y.; Yi, C.; Guo, D.; Zheng, J. Comparison on Zhang neural dynamics and gradient-based neural dynamics for online solution of nonlinear time-varying equation. Neural Comput. Appl. 2010, 20, 1–7. [Google Scholar] [CrossRef]
- Zhang, Y.; Xiao, L.; Xiao, Z.; Mao, M. Zeroing Dynamics, Gradient Dynamics, and Newton Iterations; CRC Press: Boca Raton, FL, USA, 2015. [Google Scholar]
- Oppenheim, A.V.; Willsky, A.S.; Nawab, S.H. Signals and Systems; Prentice Hall: Upper Saddle River, NJ, USA, 1996. [Google Scholar]
- Perko, L. Differential Equations and Dynamical Systems; Springer: New York, NY, USA, 2001. [Google Scholar]
- Healey, M. Principles of Automatic Control; English Universities Press: London, UK, 1975. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| NN | Nonautonomous nonlinear |
| DD | Direct dynamics |
| ZND | Zhang neural dynamics |
| MTVP | Mixed temporally varying perturbation |
| CS | Complete synchronization |
| AS | Anti-synchronization |
| PS | Projective synchronization |
| MPS | Modified projective synchronization |
| FPS | Function projective synchronization |
| MFPS | Modified function projective synchronization |
| GFPS | Generalized function projective synchronization |
| GBVFPS | Generalized bi-variable function projective synchronization |
| FDVIP | Four-dimensional vehicular inverted pendulum |
| Neuro-PID | Neuro-proportional integral derivative |
| Bi-Variable Scaling Function Matrix | Type of Synchronization |
|---|---|
| GBVFPS | |
| GFPS | |
| MFPS | |
| FPS | |
| MPS | |
| PS | |
| AS | |
| CS |
| No. | Perturbation | Expression | Characteristic |
|---|---|---|---|
| 1 | Zero perturbation | Ideal environment | |
| 2 | Bounded constant perturbation | Stabilization | |
| 3 | Linear-form MTVP | Linear change | |
| 4 | Exponential-form MTVP | Exponential decay change | |
| 5 | Sine-form MTVP | Sinusoidal periodic change | |
| 6 | Exponential-sine-form MTVP | Composite change of exponential and sinusoidal |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Huang, M.; Zhang, Y. Zhang Neuro-PID Control for Generalized Bi-Variable Function Projective Synchronization of Nonautonomous Nonlinear Systems with Various Perturbations. Mathematics 2024, 12, 2715. https://doi.org/10.3390/math12172715
Huang M, Zhang Y. Zhang Neuro-PID Control for Generalized Bi-Variable Function Projective Synchronization of Nonautonomous Nonlinear Systems with Various Perturbations. Mathematics. 2024; 12(17):2715. https://doi.org/10.3390/math12172715
Chicago/Turabian StyleHuang, Meichun, and Yunong Zhang. 2024. "Zhang Neuro-PID Control for Generalized Bi-Variable Function Projective Synchronization of Nonautonomous Nonlinear Systems with Various Perturbations" Mathematics 12, no. 17: 2715. https://doi.org/10.3390/math12172715
APA StyleHuang, M., & Zhang, Y. (2024). Zhang Neuro-PID Control for Generalized Bi-Variable Function Projective Synchronization of Nonautonomous Nonlinear Systems with Various Perturbations. Mathematics, 12(17), 2715. https://doi.org/10.3390/math12172715