Abstract
This paper investigates adaptive output feedback control problem for switched uncertain nonlinear systems with input quantization, unmeasured system states and state constraints. Firstly, fuzzy logic systems are introduced to identify system uncertainties, then the fuzzy based observer is constructed to estimate unavailable states. Secondly, combing the backstepping technique and the barrier Lyapunov function method, an adaptive fuzzy output feedback control law is designed, which guarantees that all signals in the closed-loop system are bounded, the system output tracks the reference signal, and system states satisfy their corresponding constraint conditions. Finally, simulation results further show the good performances of the proposed control scheme.
1. Introduction
With the development of social technology and industry, more and more control systems show the complex and multimode characteristics. Switched systems as a kind of hybrid systems have been widely concerned. In recent years, researches on switched systems have made some achievements. For switched linear systems, there are more related results [1,2,3,4]. In [5], an event-triggered based control issue was investigated for a class of switched linear systems with bounded exogenous disturbances. In [6], the non-fragile finite-time extended dissipative control problem is studied for discrete-time switched linear systems under a switching law with average dwell-time. For switched nonlinear systems, the research results are relatively less [7,8,9]. For example, the multierror constraint control problem was first proposed under different coordinate transformations in [10], and was successfully solved by using dwell time method. In [11], an adaptive output feedback fault tolerant control problem was studied for switched nonstrict-feedback nonlinear systems based on the small-gain technique.
Similar to traditional control systems, it is often difficult to obtain the system states in the control process of switched systems. Then, it is necessary to design a corresponding state observer to eatimate the unmeasurable states [12,13,14,15,16]. However, the switching signal is the unique feature of switched systems compared to other systems. This also makes the design of controller and observer more difficult. As we know, the state observer of a switched system also contains the switching signal. Then, is the switching signal consistent with that of the original control system or not? Moreover, due to the existing of nonlinear structures, these directly affect the design of the controllers. In this paper, an observer design method in which the switching signal is consistent with that of the original control system is considered, which makes it easier to observe the unavailable states. Moreover, the unknown system dynamics are considered in this paper, then an adaptive fuzzy observer is designed. The fuzzy based approach is one of the artificial intelligence techniques widely used in various applications [17,18,19]. In [17], an innovative approach to reducing the mesh-induced error in CFD analysis of an impinging jet using fuzzy logic was proposed.
In addition, both the input quantification problem and the state constraint issue are also considered. These problems are common in the actual production process, so the research of this paper has a certain practical application value. At present, the research on these problems is almost focused on the nonswitched systems [20,21,22,23,24]. For example, in [21] the fault-tolerant attitude control of flexible spacecraft is investigated over digital communication channels, where a uniform quantizer is considered with respect to the sensor signals and controller indexes. An adaptive neural control method was proposed for a class of nonlinear time-varying delayed systems with time-varying full-state constraints in [22]. The related research results of switched systems are few and far between [25,26,27]. This is also one of the motivations of this paper.
Inspired by the above analysis, this paper focuses on switched nonlinear systems with the input quantification problem and the state constraint issue. The fuzzy based observer is constructed to estimate unmeasurable states. The barrier Lyapunov function method is used to ensure the system states satisfy the corresponding constraint conditions. An adaptive output feedback controller is designed that can offset the effect caused by the input quantification by using the backstepping technique. Finally, simulation results further show the good performances of the proposed control scheme.
Compared with the existing results of switched systems, the main contribution of this paper is that the adaptive output feedback control problem for switched systems is studied. As far as we know, this is the first time in this kind of system to ensure that the system states meet the constraint conditions, and to overcome the impact of quantized input at the same time. Combining the barrier Lyapunov function method with backstepping technology, the adaptive controller is designed, and these problems are successfully solved.
This paper is organized as follows. Section 2 shows the system description, the control objective, and the necessary assumption. In Section 3, an fuzzy based observer is designed to estimate the unavailable system states. Section 4 gives the design process of the adaptive controller by using barrier Lyapunov function method. Section 5 expresses the main result and analyzes the stability of the closed-loop system. A simulation example is employed to illustrate the effectiveness of the proposed control approach in Section 6. Finally, Section 7 provides the conclusions.
2. System Description
In this paper, the following switched uncertain nonlinear system is considered
where , and are the system state vectors, represents the system output. The function is the switching signal, which is assumed to be a piecewise continuous (from the right) function of time, and represents the number of subsystems. In addition, indicates that the th subsystem is in working state. stands for the system control input, which is also the output of the quantizer (the input quantization will be introduced later), is a smooth nonlinear function, which is unknown, is the bounded disturbance, and satisfies with being a constant. It is worth noting that is unmeasurable, and only is available in this paper.
In addition, the input quantization is considered here, which is expressed as [28]
where is the input for quantizer, and with being the quantitative degree.
To facilitate the analysis, the input quantization (2) is rewritten as
where
with being a constant. Since the sign of the control input is invariant during quantization, it follows from (4) that . To simplify writing, let , which is also positive.
Control Objectives: The control objective of this paper is to design an adaptive output feedback controller for the switched system (1) with input quantization (2) and state constraints under the arbitrarily switching law such that (1) all signals in the closed-loop system are bounded, (2) the tracking errors can converge to a small neighborhood of origin, (3) all system states do not violate their corresponding constraint conditions.
Assumption 1 [29].
Assumed that the tracking signal and its time derivatives up to the th order are continuous and bounded.
3. Fuzzy Observer Design
A. Description of Fuzzy Logic Systems
The FLSs consisting of If-Then rules is introduced to solve the unknown function problem in the controlled system:
: If is and is and is , is .
When is the input and is the output, and are fuzzy sets in , relevant to the fuzzy affiliation functions and . is the fuzzy rule number. Then, the following formula be utilized to describe FLSs
where refers to the maximum value of on .
Let
and denote and , then FLSs can be expressed as .
B. Fuzzy Observer Design
To solve the unavailable system state problem, this section introduces a fuzzy state observer. Firstly, rewrite the considered system (1) as follows
where
Select such that holds, where and are all positive matrice.
The following adaptive fuzzy observer is designed
where , is the estimation of , and . is the estimation of with being the optimal vector. Let be the estimated error.
Based on the universal approximation of fuzzy logic systems, the uncertain nonlinear system functions are approximated by the following form:
Define the corresponding error as
where and are corresponding error variables, which are bounded. That is to say, there exist constants and such that and .
Define the observation error as .
Based on (1) and (8), the following results can be obtained
where , , and there are two constants and such that and hold.
4. Adaptive Fuzzy Controller
In this section, the backstepping technique and the barrier Lyapunov function method are used to construct the adaptive fuzzy controller. Firstly, the coordinate transformation is defined as
where is the reference signal, denote the transformation errors, are virtual controllers, which are designed in later steps.
Step 1: According to (1), (8) and (12), the derivative of is
To solve the state constraint problem, the barrier Lyapunov function is selected as follows
where is time-varying function, and . is a design parameter. represents the estimation error between and , stands for the estimate of with .
The derivative of is calculated as
Consider the following facts
where is a design parameter. Then, according to (15)–(18) into (15), one has
Design the virtual control law as follows
where is a design parameter, , , and .
Select the following adaptive law
where is a parameter.
Further, it holds that
Substituting (20)–(22) into (19), one gets
where .
Step : Based on (1) and (12), one obtains
where ,
Select the barrier Lyapunov function as
where represents the design parameter.
Taking the time derivative of , one has
Applying Young’s inequality, it derives that
where is a design parameter.
Combing (26)–(32), one gets
For control purposes, the virtual controller is designed as
where is a design parameter, , , and , .
And the adaptive law is chosen as
where is a design parameter.
Consider that
and substituting (34)–(36) into (33), one gets
where .
Step : Based on (1), (3) and (8), one gets
where , .
Choose the following barrier Lyapunov function
where indicates a design parameter.
Differentiating , one obtains
Consider the following inequalities
where is a design parameter.
According (40), (41)–(46), one has
Design the adaptive output feedback control law
where is design parameter, , , and , .
Design the adaptive law
where is a design parameter.
The following inequalities always hold
According to (47)–(50), one obtains
where .
5. Stability Analysis
To facilitate the description, the following notation is defined
where .
Theorem 1.
Consider the switched uncertain nonlinear system (1) with input quantization (2), unmeasurable states and state contraints, under Assumption 1, the adaptive output feedback controller in (48) is constructed by using the barrier Lyapunov function method and the backstepping technique, which can guarantee that all signals in the closed-loop system are bounded, the tracking error converges to a small neighborhood of origin, and none of the states in the system conflict with their corresponding constraints.
Proof.
Select the barrier Lyapunov function as follows
According to the above analysis and the definitions in (52) and (53), one has
Integrating (55) over the interval , one obtains
Based on (54) and (56), one deduces that
Similarly, it can be derived that
From (54) and (56), one easily knows that transformation errors , observer errors and estimation errors are all bounded for the bounded initial values. The tracking error is bounded, this implies that the system output tracks the reference signal. Due to the boundedness of and , then is also bounded. According to the definitions of , , , , and Assumption 1, it can be seen that , , , and are all bounded. Thus, all signals in the closed-loop system are all bounded. Moreover, in the proposed control method, the barrier Lyapunov function is employed such that the system states satisfy the corresponding states. □
Remark 1.
It is worth noting that when and are bounded, is also bounded. This can be seen from (4). Then, by observing (5), one can easily know that is bounded, namely , where is a positive constant. Therefore, in the future work, the boundedness case of can be considered.
Remark 2.
In this paper, there are many design parameters in the control, which may affect the system performance. In order to ensure that the system has a good performance, the selection of these design parameters are important. and are positive matrices which should be satisfy the Riccati-like equation. From (58), it is easy to know that the value of the tracking error is associated with , and . For lager , and smaller , the tracking error are smaller. At the same time the other signals of the system are smaller. For the other parameters, it is enough to choose them satisfy their corresponding conditions, such as positive.
Remark 3.
Compared with the existing results in [30,31,32], in which the mode-dependent Lyapunov function is chosen, a common Lyapunov function which is mode-independent is selected in this paper. This because of that the arbitrary switching law is employed here. Actually, in engineering problems, switching signals are often unknown or unable to be determined in advance, so the stability of switched systems under arbitrary switching signals is of special significance. Thus, in this paper, the arbitrary switching law is selected. If a switched system can be stabilized under the arbitrary signal, then the subsequent research (such as robust control, etc.) does not need to pay attention to the impact of switching signals on the system stability.
6. Simulation Example
In this section, a simulation experiment is used to show the effectiveness of the proposed adaptive fuzzy output feedback control approach. Consider the following uncertain nonlinear switched system
where stands for the switching signal. When , the external disturbance are chosen as , and , the nonlinear functionss are and . When , the external disturbances are and , and the nonlinear functions are chosen as and .
Moeover, the input quantization is selected as
where . In addition, to solve the problem of unmeasurable states, the following fuzzy-based observer is designed
and the adaptive virtual controller and the adaptive quantization controller are chosen as
In this simulation, the reference signal is selected as , the associated initial value is set as , , , , , , , . The relevant design parameters are chosen as , .
Figure 1, Figure 2, Figure 3, Figure 4, Figure 5, Figure 6 and Figure 7 show the simulation results. Figure 1 gives the switching signal. Figure 2 depicts the trajectories of the system output, its constraint bounds and the tracking signal. From which, one sees that the reference signal can be followed well, and the system output successfully satisfies its constraint condition. Figure 3 describes the trajectories of state and its constraint condition. We can find that is limited within prespecified range. Figure 4 expresses the curves of the state and , and their estimated error , respectively. Figure 5 shows the curves of the state and , and their estimated error , respectively. From Figure 4 and Figure 5, we can conclude that the system state and are well observed. Figure 6 gives the curves of the adaptive laws , , and the input quantization is presented in Figure 7. Figure 6 and Figure 7 immplies that , and are all bounded. From the simulation results above, it can be concluded that by using the proposed control approach, the control objectives are achieved, thus it is effective.
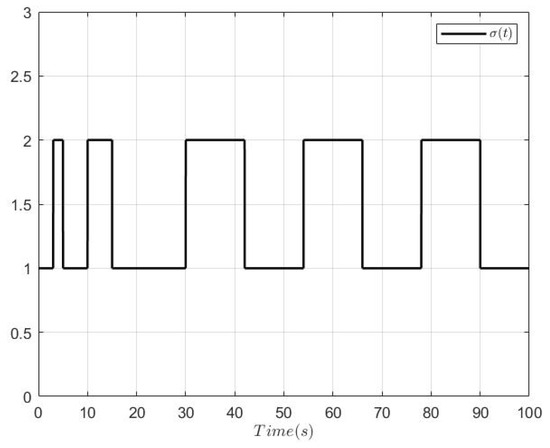
Figure 1.
The switching signal.
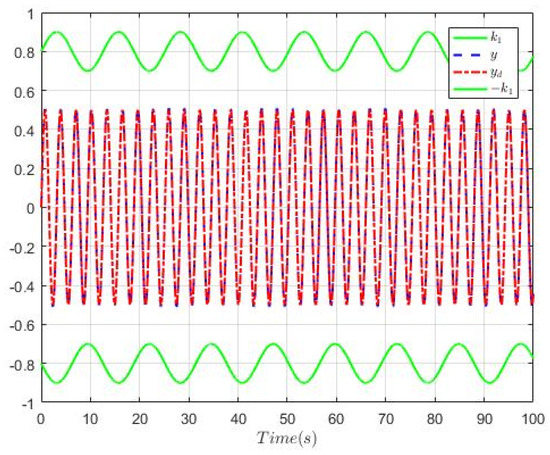
Figure 2.
Curves of tracking results.
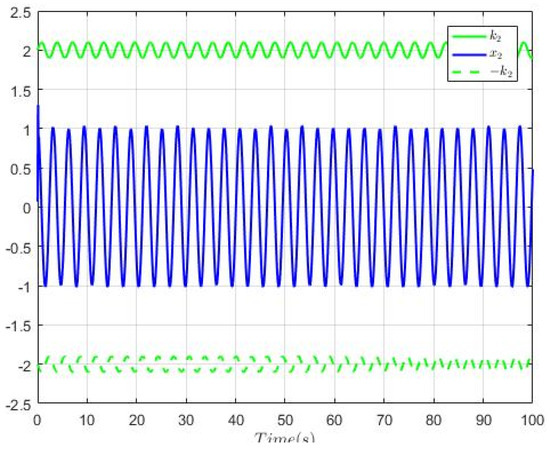
Figure 3.
Trajectories of system states and its constraint conditions.
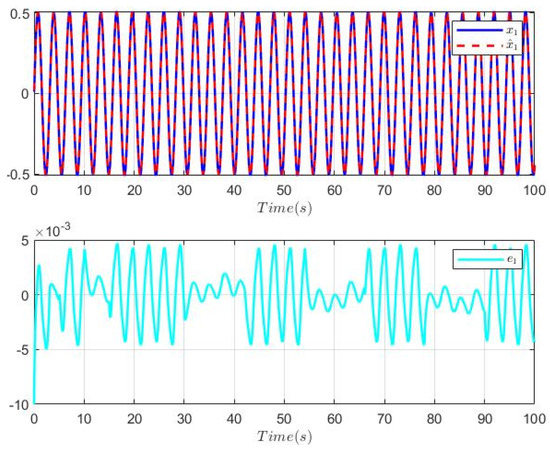
Figure 4.
Trajectories of the system state , the observer state , and their estimation error.
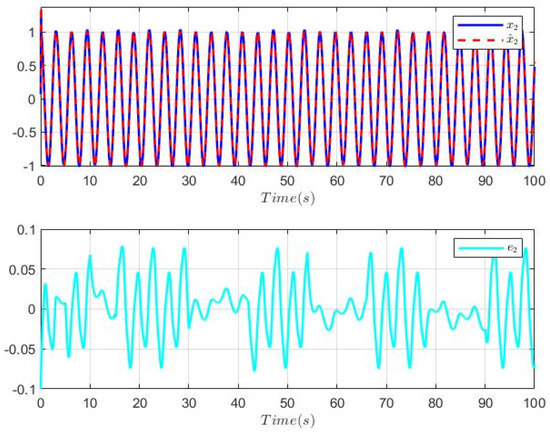
Figure 5.
Trajectories of the system state , the observer state , and their estimation error.
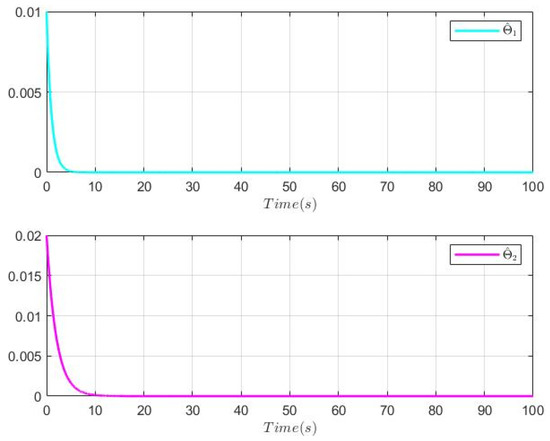
Figure 6.
Curves of and .
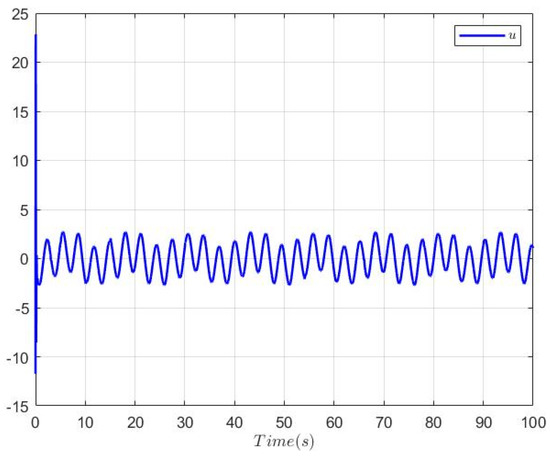
Figure 7.
The trajectory of input quantization .
7. Conclusions
This paper focuses on the input quantization, state constraints and unmeasured system states issues for switched nonlinear systems. For the unmeasured states, a fuzzy-based state observer is developed to estimate them. Then, the barrier Lyapunov function approach is employed to guarantee that the system state does not exceed the corresponding constraint bound. Using the backstepping technique, an adaptive control law is designed that can offset the impact of input quantification. However, due to the application of backstepping method, the problem of computation explosion may be caused. Therefore, how to reduce the amount of computation will be studied in future research.
Author Contributions
Conceptualization, S.Q.; methodology, S.Q.; software, S.Q.; writing—original draft preparation, S.Q.; writing—review and editing, J.Z. and L.T. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported in part by the National Natural Science Foundation of China under Grant 61973060, and by the 111 Project (B16009).
Data Availability Statement
The data presented in this study are available in this article.
Acknowledgments
The authors are very grateful to the reviewers for their valuable comments and suggestions.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Ren, H.L.; Zong, G.D.; Li, T.S. Event-triggered finite-time control for networked switched linear systems with asynchronous switching. IEEE Trans. Syst. Man Cybern. Syst. 2018, 48, 1874–1884. [Google Scholar] [CrossRef]
- Yang, D.; Li, X.D.; Qiu, J.L. Output tracking control of delayed switched systems via state-dependent switching and dynamic output feedback. Nonlinear Anal. Hybrid Syst. 2019, 32, 294–305. [Google Scholar] [CrossRef]
- Zong, G.; Yang, D.; Lam, J.; Song, X. Fault-tolerant control of switched LPV systems: A bumpless transfer approach. IEEE/ASME Trans. Mechatron. 2021, 27, 1436–1446. [Google Scholar]
- Liu, C.; Liu, X.Y. Stability of switched systems with time-varying delays under state-dependent switching. Mathematics 2022, 10, 2722. [Google Scholar] [CrossRef]
- Qi, Y.W.; Zeng, P.Y.; Bao, W. Event-triggered and self-triggered H∞ control of uncertain switched linear systems. IEEE Trans. Syst. Man Cybern. Syst. 2018, 50, 1442–1454. [Google Scholar] [CrossRef]
- Xia, J.; Gao, H.; Liu, M.; Zhuang, G.; Zhang, B. Non-fragile finite-time extended dissipative control for a class of uncertain discrete time switched linear systems. J. Frankl. Inst. 2018, 355, 3031–3049. [Google Scholar] [CrossRef]
- Liu, L.; Liu, Y.J.; Chen, A.; Tong, S.; Chen, C.L.P. Integral barrier Lyapunov function-based adaptive control for switched nonlinear systems. Sci. China Inf. Sci. 2020, 63, 1–14. [Google Scholar] [CrossRef]
- Zhao, X.; Wang, X.; Ma, L.; Zong, G. Fuzzy approximation based asymptotic tracking control for a class of uncertain switched nonlinear systems. IEEE Trans. Fuzzy Syst. 2019, 28, 632–644. [Google Scholar] [CrossRef]
- Sun, K.; Mou, S.; Qiu, J.; Wang, T.; Gao, H. Adaptive fuzzy control for nontriangular structural stochastic switched nonlinear systems with full state constraints. IEEE Trans. Fuzzy Syst. 2018, 27, 1587–1601. [Google Scholar] [CrossRef]
- Liu, L.; Liu, Y.J.; Tong, S.C. Fuzzy-based multierror constraint control for switched nonlinear systems and its applications. IEEE Trans. Fuzzy Syst. 2018, 27, 1519–1531. [Google Scholar] [CrossRef]
- Ma, L.; Xu, N.; Zhao, X.; Zong, G.; Huo, X. Small-gain technique-based adaptive neural output-feedback fault-tolerant control of switched nonlinear systems with unmodeled dynamics. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 7051–7062. [Google Scholar] [CrossRef]
- Deng, W.X.; Yao, J.Y. Extended-state-observer-based adaptive control of electrohydraulic servomechanisms without velocity measurement. IEEE/ASME Trans. Mechatron. 2019, 25, 1151–1161. [Google Scholar] [CrossRef]
- Xiao, W.; Cao, L.; Li, H.; Lu, R. Observer-based adaptive consensus control for nonlinear multi-agent systems with time-delay. Sci. China Inf. Sci. 2020, 63, 1–17. [Google Scholar] [CrossRef]
- Zhu, J.W.; Gu, C.Y.; Ding, S.X.; Zhang, W.-A.; Wang, X.; Yu, L. A new observer-based cooperative fault-tolerant tracking control method with application to networked multiaxis motion control system. IEEE Trans. Ind. Electron. 2020, 68, 7422–7432. [Google Scholar] [CrossRef]
- Yao, H.J.; Gao, F.Z. Design of observer and dynamic output feedback control for fuzzy networked systems. Mathematics 2023, 11, 148. [Google Scholar] [CrossRef]
- Zhang, H.G.; Liu, Y.; Wang, Y.C. Observer-based finite-time adaptive fuzzy control for nontriangular nonlinear systems with full-state constraints. IEEE Trans. Cybern. 2020, 51, 1110–1120. [Google Scholar] [CrossRef]
- Sosnowski, M.; Krzywanski, J.; Scurek, R. A fuzzy logic approach for the reduction of mesh-induced error in CFD analysis: A case study of an impinging jet. Entropy 2019, 21, 1047. [Google Scholar] [CrossRef]
- Krzywanski, J. Heat transfer performance in a superheater of an industrial CFBC using fuzzy logic-based methods. Entropy 2019, 21, 919. [Google Scholar] [CrossRef]
- Xiao, F. A hybrid fuzzy soft sets decision making method in medical diagnosis. IEEE Access 2018, 6, 25300–25312. [Google Scholar] [CrossRef]
- Tang, R.Q.; Su, H.S.; Zou, Y.; Yang, X.S. Finite-time synchronization of Markovian coupled neural networks with delays via intermittent quantized control: Linear programming approach. IEEE Trans. Neural Netw. Learn. Systems 2021, 33, 5268–5278. [Google Scholar] [CrossRef]
- Liu, Q.; Liu, M.; Duan, G. Adaptive fuzzy backstepping control for attitude stabilization of flexible spacecraft with signal quantization and actuator faults. Sci. China Inf. Sci. 2021, 64, 116. [Google Scholar] [CrossRef]
- Li, D.; Chen, C.L.P.; Liu, Y.J.; Tong, S. Neural network controller design for a class of nonlinear delayed systems with time-varying full-state constraints. IEEE Trans. Neural Netw. Learn. Syst. 2019, 30, 2625–2636. [Google Scholar] [CrossRef] [PubMed]
- Xia, J.; Zhang, J.; Sun, W.; Zhang, B.; Wang, Z. Finite-time adaptive fuzzy control for nonlinear systems with full state constraints. IEEE Trans. Syst. Man Cybern. Syst. 2018, 49, 1541–1548. [Google Scholar] [CrossRef]
- Sun, R.H.; Tang, L.; Liu, Y.J. Boundary controller design for a class of horizontal belt transmission system with boundary vibration constraint. Mathematics 2022, 10, 1391. [Google Scholar] [CrossRef]
- Yang, X.S.; Cao, J.D.; Xu, C.; Feng, J.W. Finite-time stabilization of switched dynamical networks with quantized couplings via quantized controller. Sci. China Technol. Sci. 2018, 61, 299–308. [Google Scholar] [CrossRef]
- Zou, Y.; Su, H.S.; Tang, R.Q.; Yang, X.S. Finite-time bipartite synchronization of switched competitive neural networks with time delay via quantized control. ISA Trans. 2022, 125, 156–165. [Google Scholar] [CrossRef] [PubMed]
- Yang, X.S.; Wan, X.X.; Cheng, Z.S.; Cao, J.D.; Liu, Y.; Rutkowski, L. Synchronization of switched discrete-time neural networks via quantized output control with actuator fault. IEEE Trans. Neural Netw. Learn. Syst. 2021, 32, 4191–4201. [Google Scholar] [CrossRef] [PubMed]
- Wang, C.; Wen, C.; Lin, Y.; Wang, W. Decentralized adaptive tracking control for a class of interconnected nonlinear systems with input quantization. Automatica 2017, 81, 359–368. [Google Scholar] [CrossRef]
- Liu, Y.J.; Lu, S.M.; Tong, S.C. Neural network controller design for an uncertain robot with time-varying output constraint. IEEE Trans. Syst. Man Cybern. Syst. 2017, 47, 2060–2068. [Google Scholar] [CrossRef]
- He, C.; Tang, R.; Lam, H.K.; Cao, J. Mode-dependent event-triggered output control for switched TS fuzzy systems with stochastic switching. IEEE Trans. Fuzzy Syst. 2022, 2022, 1–11. [Google Scholar] [CrossRef]
- Wang, H.; Yang, X.; Xiang, Z.; Tang, R. Synchronization of switched neural networks via attacked mode-dependent event-triggered control and its application in image encryption. IEEE Trans. Cybern. 2022, 2022, 1–10. [Google Scholar] [CrossRef]
- Zhang, M.; Yang, X.; Xiang, Z.; Sun, Y. Monotone decreasing LKF method for secure consensus of second-order mass with delay and switching topology. Syst. Control. Lett. 2023, 172, 105436. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).