Abstract
Utilizing -numbers and -concepts, in 2016, Duran et al. considered -Genocchi numbers and polynomials, -Bernoulli numbers and polynomials and -Euler polynomials and numbers and provided multifarious formulas and properties for these polynomials. Inspired and motivated by this consideration, many authors have introduced -special polynomials and numbers and have described some of their properties and applications. In this paper, using the -cosine polynomials and -sine polynomials, we consider a novel kinds of -extensions of geometric polynomials and acquire several properties and identities by making use of some series manipulation methods. Furthermore, we compute the -integral representations and -derivative operator rules for the new polynomials. Additionally, we determine the movements of the approximate zerosof the two mentioned polynomials in a complex plane, utilizing the Newton method, and we illustrate them using figures.
Keywords:
(p, q)-trigonometric functions; (p, q)-calculus, cosine polynomials; sine polynomials; geometric polynomials; (p, q)-geometric polynomials MSC:
05A30; 11B73; 11B83
1. Introduction
In 2016, Duran et al. [1] considered and defined -Genocchi numbers and polynomials, -Bernoulli polynomials and numbers and -Euler numbers and polynomials. In addition, they provided many properties and formulas for these polynomials. After this study presented new extensions of some special polynomials and numbers by the -numbers and -concepts, many authors introduced and investigated many other generalizations of the special polynomials and numbers, such as -geometric-type polynomials by Khan et al. [2], -Appell type polynomials by Sadjang [3], two bivariate kinds of -Bernoulli numbers and polynomials by Sadjang et al. [4], Apostol type -Frobenius Eulerian polynomials by Khan et al. [5], -Frobenius–Euler numbers and polynomials by Duran et al. [6] and -cosine and -sine geometric polynomials by Khan et al. [7]. Recently, Ryoo et al. [8] defined and introduced q-cosine and q-sine Euler polynomials and also provided some figures including the approximate roots’ movements of these polynomials. Inspired and motivated by the above studies, in this paper, utilizing the -sine polynomials and -cosine polynomials, we introduce new kinds of -generalizations of geometric polynomials and attain diverse properties and formulas by making use of some series manipulation methods. Moreover, we develop the -integral representations and -derivative operator rules for these polynomials. Furthermore, we determine the movements of the approximate zerosof the mentioned novel polynomials in a complex plane using the Newton method and we indicate them in figures.
The twin-basic numbers, also termed -numbers, are provided by
for (cf. [9,10,11]).
The -derivative operator of a function g with respect to is given as follows
with , providing that g is differentiable at 0.
The -extension of the binomial coefficients is introduced as follows
where the -analogs of the factorial numbers are given by
The -extension of addition is given as follows
with and this also has the following expansion
The -extension of subtraction is provided as follows
with and this also has the following expansion
The -analogs of the exponential functions, and , are provided as follows:
which have the following relationships
and the following rules
We observe that
The -definite integral is provided (cf. [11]) as follows:
in conjunction with
The -generalizations of the sine functions and the cosine functions are provided (cf. [4]) as follows:
From (4) and (9), we can easily observe that
which are the -extensions of the classical Euler formula , where and .
2. On -Extensions of Geometric Polynomials
The geometric polynomials, also termed Fubini polynomials, are provided by (cf. [12,13]):
which gives
where the notation , known as the Stirling numbers of the second kind, are defined as follows (cf. [14,15]):
Letting , we acquire , which shows the corresponding geometric numbers.
Khan et al. [2] considered the three variable -geometric polynomials as follows:
Taking in (13), we attain the two variable -geometric polynomials provided by
The Maclaurin series expansions of and , are developed as follows (cf. [16]):
where
Recently, Sadjang et al. [4] introduced and investigated -extensions of and :
and
where
and
Motivated by the above, we now define new kinds of the -extensions of and as follows
and
which readily yields the following explicit formulas:
and
Recently, the -extensions of the sine-geometric polynomials and cosine-geometric polynomials and are considered (cf. [7]) as follows:
and
for , providing that . Then, several properties were derived in [7].
3. New Kinds of -Cosine and -Sine Geometric Polynomials
Motivated and inspired by definitions (23) and (24), we consider the following definition.
Definition 1.
We introduce novel kinds of -sine and -cosine geometric polynomials, for , providing that , as follows:
and
Letting in (23) and (24), we attain two variables, the -geometric polynomials provided as follows (cf. [2]) that
When in (23) and (24), we acquire the familiar -geometric polynomials provided as follows that
and setting and in (23) and (24), we acquire the usual -geometric numbers provided as follows (cf. [2]) that
Here we can provide the consideration of Definition 1 arising from the two variables, the -geometric polynomials , as follows.
Theorem 1.
The following identities hold:
and
for and .
Proof.
From (14), (7) and Definition 1, we can observe that
and similarly
which complete the proofs of (28) and (29). □
Remark 1.
According to Theorem 1 and Definition 1, we can observe that
and
Theorem 2.
We have
and
which hold for and provided that .
Proof.
In view of (25) and (26), making use of (21) and (22), we can obviously observe that
and
which gives the claimed Formulas (30) and (31). □
Theorem 3.
Let provide and . The following relations are valid:
and
Proof.
In terms of (23) and (24), making use of (9), it can be obviously seen that
and
which conclude the proofs of the claimed relations (32) and (33). □
Theorem 4.
Let provided that and . The following correlations are valid:
and
Proof.
Making use of (17), (18), (23) and (24), the proofs of (34) and (35) are based upon the equalities provided below:
and
So, we can skip the elaborations. □
Theorem 5.
Let provided that and . The following identities are valid:
and
Proof.
Making use of (17), (18), (23) and (24), we can observe that
and
which complete the proofs. □
Some derivative and integral properties are presented as follows.
Theorem 6.
Let provided that and . The following rules are valid:
Proof.
Applying the -derivative operator to (23) with respect to , and also making use of (6), it can be obviously seen that
which gives the first rule. The other rules can easily be derived in the same way. □
Theorem 7.
Let provided that and . The following rules are valid
and
Proof.
Since
cf. [11], making use of Theorem 6, (23) and (24), it is observed that
and
which completes the proof of the Theorem. □
Here are some summation formulas.
Theorem 8.
Let , provided that and . The following equalities are valid
and
Proof.
Making use of (23) and (24), it can be obviously observed that
and
which conclude the proofs of (39) and (40). □
Now, we develop some identities for and .
Theorem 9.
Let , provided that and . The following summation identities are valid
and
Proof.
Making use of the following identity
and from (23) and (24), we obtain
and
which give the claimed results (41) and (42). □
The -analog of the Stirling numbers of the second kind are provided as follows (cf. [6]):
Theorem 10.
Let , provided that and . The following correlations are valid
and
Proof.
Making use of (23), it can be obviously observed that
which completes the proof of (43). The other correlation (44) can be calculated in the same way. □
4. Further Remarks
In this section, certain zeros of and , and their graphical representations are shown.
Remember from (25) and (26) that
and
A few of the -cosine geometric polynomials are
We can develop the beautiful roots of the polynomials by making use of a math program on a computer. We plot the roots of the polynomials as follows (Figure 1).
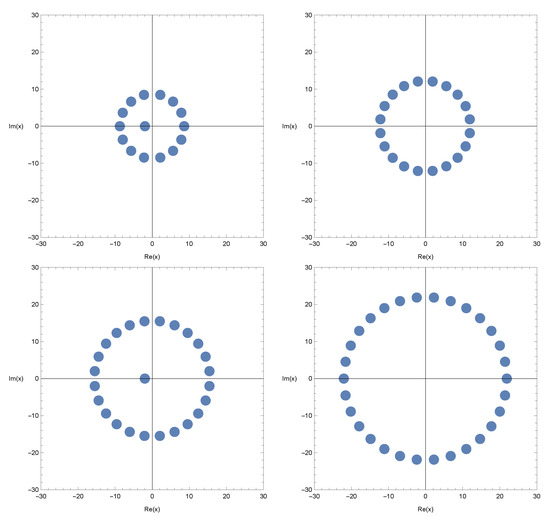
Figure 1.
Stacking structure of approximation roots in -cosine geometric polynomials when and .
In Figure 1 (top-left), we took and . In Figure 1 (top-right), we took and . In Figure 1 (bottom-left), we took and . In Figure 1 (bottom-right), we took and .
For , stacks of the roots of the polynomials , forming a 3D structure, are investigated below (Figure 2).
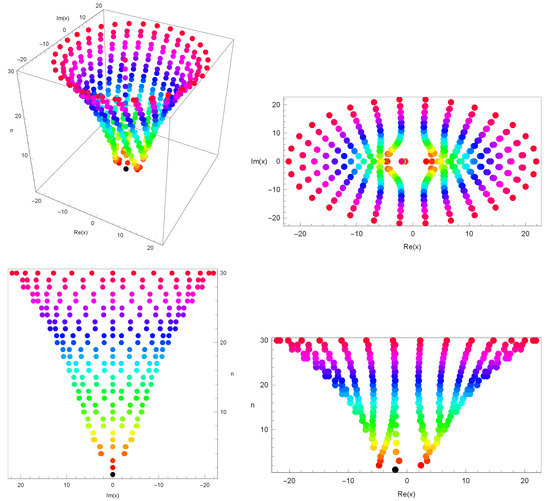
Figure 2.
Stacking structure of approximation roots in -cosine geometric polynomials when and in 3D.
In Figure 2 (top-left), we drew stacks of roots of for , . In Figure 2 (top-right), we plotted x and y axes but no z axis in 3D. In Figure 2 (bottom-left), we drew y and z axes but no x axis in 3D. In Figure 2 (bottom-right), we drew x and z axes but no y axis in 3D.
Afterwards, we computed an approximate solution fulfilling . We provide some computations in Table 1.

Table 1.
Approximate solutions of .
Plots of the real roots of for are shown in Figure 3.
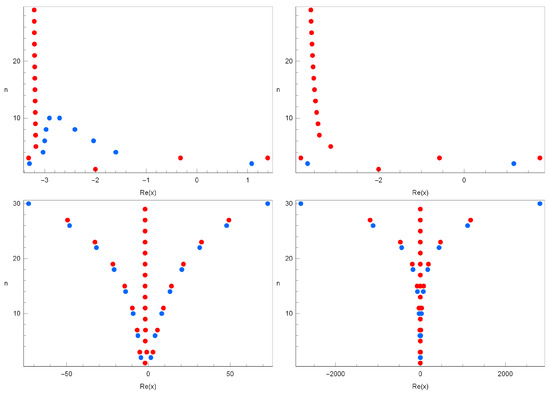
Figure 3.
Stacking structure of approximation roots in -cosine geometric polynomials when and .
In Figure 3 (top-left), we took and . In Figure 3 (top-right), we took and . In Figure 3 (bottom-left), we took and . In Figure 3 (bottom-right), we took and .
Next, certain zeros of the -sine geometric polynomials and their graphical representations are shown.
A few of them are
Now, we can develop the beautiful zeros of the polynomials by making use of a math program on a computer. The roots of the polynomials are illustrated in Figure 4.
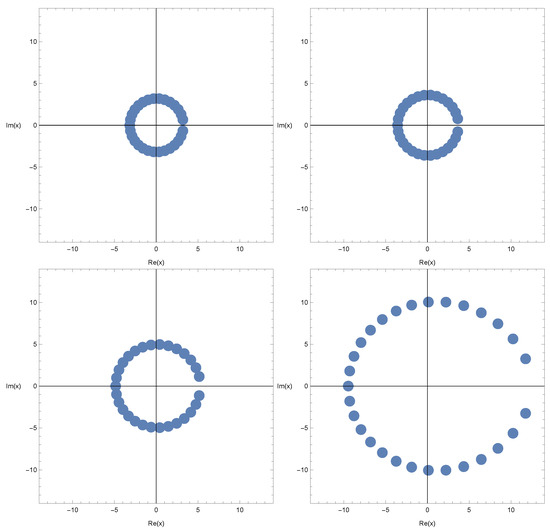
Figure 4.
Stacking structure of approximation roots in -sine geometric polynomials when and .
In Figure 4 (top-left), we took and . In Figure 4 (top-right), we took and . In Figure 4 (bottom-left), we took and . In Figure 4 (bottom-right), we took and .
Stacks of roots of the polynomials for , forming a three-dimensional structure, were developed and these are shown in Figure 5.
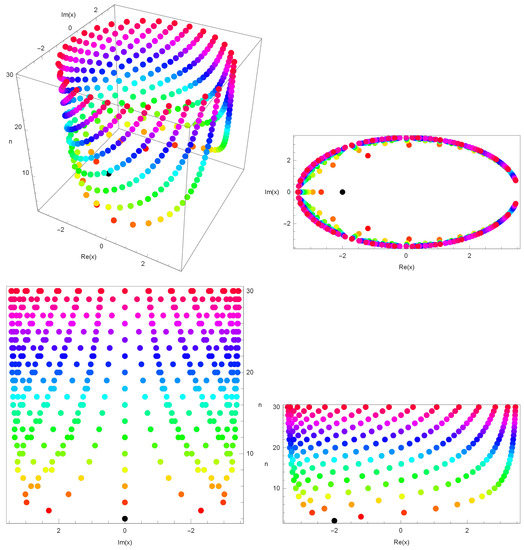
Figure 5.
Stacking structure of approximation roots in -sine geometric polynomials when and in 3D.
In Figure 5 (top-left), we drew stacks of roots of for , . In Figure 5 (top-right), we drew x and y axes but no z axis in 3D. In Figure 5 (bottom-left), we drew y and z axes but no x axis in 3D. In Figure 5 (bottom-right), we drew x and z axes but no y axis in 3D.
Then, we computed an approximate solution fulfilling . We provide some computations in Table 2.
Table 2.
Approximate solutions of .
5. Conclusions
Utilizing -numbers and -concepts, Duran et al. [1] considered -Genocchi polynomials and numbers, -Bernoulli polynomials and numbers and -Euler polynomials and numbers and provided many properties and formulas for these polynomials. Inspired and motivated by this consideration, many authors have introduced -special numbers and polynomials and have described their several identities and properties. In this paper, using the -cosine polynomials and -sine polynomials, we have introduced novel kinds of -extensions of geometric polynomials and have acquired multifarious properties and identities by making use of some series manipulation methods. Furthermore, we have computed the -integral representations and -derivative operator rules for these polynomials. Moreover, we have determined the approximate root movements of the new mentioned polynomials in a complex plane, utilizing the Newton method and illustrating them in figures. The structure of the approximate roots will come out in various ways, depending on the condition of the variables, and new methods and theorems related to this topic need to be created and proven.
Finally, we consider more general problems. How many roots do = 0 and have? We are not able to decide whether and have n distinct solutions. Here we leave a question: “Prove or disprove that and have n distinct solutions”. This question is an unsolved problem for all variables n (see Table 1 and Table 2). If we can theoretically prove the above problem by drawing new ideas from various numerical results, we look forward to contributing to research related to the roots of our new polynomials in applied mathematics, mathematical physics and engineering.
Not only can the ideas presented in this paper be utilized for similar polynomials, but these polynomials may also have possible applications in other scientific areas besides the applications described at the end of the paper. We would like to continue to study this line of research in the future.
Author Contributions
Conceptualization, S.K.S., W.A.K., C.-S.R. and U.D.; Formal analysis, U.D.; Funding acquisition, S.K.S.; Investigation, W.A.K.; Methodology, W.A.K., C.-S.R. and U.D.; Project administration, C.-S.R.; Software, S.K.S. and C.-S.R.; Writing—original draft, W.A.K. and U.D.; Writing—review & editing, S.K.S. All authors have read and agreed to the published version of the manuscript.
Funding
The first author Sunil Kumar Sharma would like to thank the Deanship of Scientific Research at Majmaah University for supporting this work under Project No. R-2022-228.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Duran, U.; Acikgoz, M.; Araci, S. On (p,q)-Bernoulli, (p,q)-Euler and (p,q)-Genocchi polynomials. J. Comput. Theor. Nanosci. 2016, 13, 7833–7908. [Google Scholar] [CrossRef]
- Khan, W.A.; Nisar, K.S.; Baleanu, D. A note on (p,q)-analogue type of Fubini numbers and polynomials. AIMS Math. 2020, 5, 2743–2757. [Google Scholar] [CrossRef]
- Njionou Sadjang, P. On (p, q)-Appell Polynomials. Anal. Math. 2019, 45, 583–598. [Google Scholar] [CrossRef]
- Sadjang, P.N.; Duran, U. On two bivariate kinds of (p,q)-Bernoulli polynomials. Miskolc. Math. Notes 2019, 20, 1185–1199. [Google Scholar] [CrossRef]
- Khan, W.A.; Khan, I.A.; Duran, U.; Acikgoz, M. Apostol type (p,q)-Frobenius Eulerian polynomials and numbers. Afr. Mat. 2021, 32, 115–130. [Google Scholar] [CrossRef]
- Duran, U.; Acikgoz, M. Apostol type (p,q)-Frobenious-Euler polynomials and numbers. Kragujev. J. Math. 2018, 42, 555–567. [Google Scholar] [CrossRef] [Green Version]
- Khan, W.A.; Muhiuddin, G.; Duran, U.; Al-Kadi, D. On (p,q)-sine and (p,q)-cosine Fubini polynomials. Symmetry 2022, 14, 527. [Google Scholar] [CrossRef]
- Ryoo, C.S.; Kang, J.Y. Explicit properties of q-cosine and q-sine Euler polynomials containing symmetric structures. Symmetry 2020, 12, 1247. [Google Scholar] [CrossRef]
- Gupta, V. (p,q)-Baskakov-Kontorovich operators. Appl. Math. Inf. Sci. 2016, 10, 1551–1556. [Google Scholar] [CrossRef]
- Jain, P.; Basu, C.; Panwar, V. On the (p,q)-Mellin transform and its applications. Acta Math. Sci. 2021, 4, 1719–1732. [Google Scholar] [CrossRef]
- Sadjang, P.N. On the fundamental theorem of (p,q)-calculus and some (p,q)-Taylor formulas. Res. Math. 2018, 73, 39. [Google Scholar] [CrossRef]
- Dil, A.; Kurt, V. Investigating geometric and exponential polynomials with Euler-Seidel matrices. J. Integer. Seq. 2011, 14, 1–12. [Google Scholar]
- Kargin, L. Some formulae for products of Fubini polynomials with applications. arXiv 2016, arXiv:1701.01023. [Google Scholar]
- Boyadzhiev, K.N. A series transformation formula and related polynomials. Int. J. Math. Math. Sci. 2005, 23, 3849–3866. [Google Scholar] [CrossRef] [Green Version]
- Tanny, S.M. On some numbers related to Bell numbers. Can. Math. Bull. 1974, 17, 733–738. [Google Scholar] [CrossRef]
- Jamei, M.-M.; Koepf, W. Symbolic computation of some power-trigonometric series. J. Symb. Comput. 2017, 80, 273–284. [Google Scholar] [CrossRef]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).