
Statistical Modeling of PPP-RTK Derived Ionospheric Residuals for Improved ARAIM MHSS Protection Level Calculation


Abstract
1. Introduction
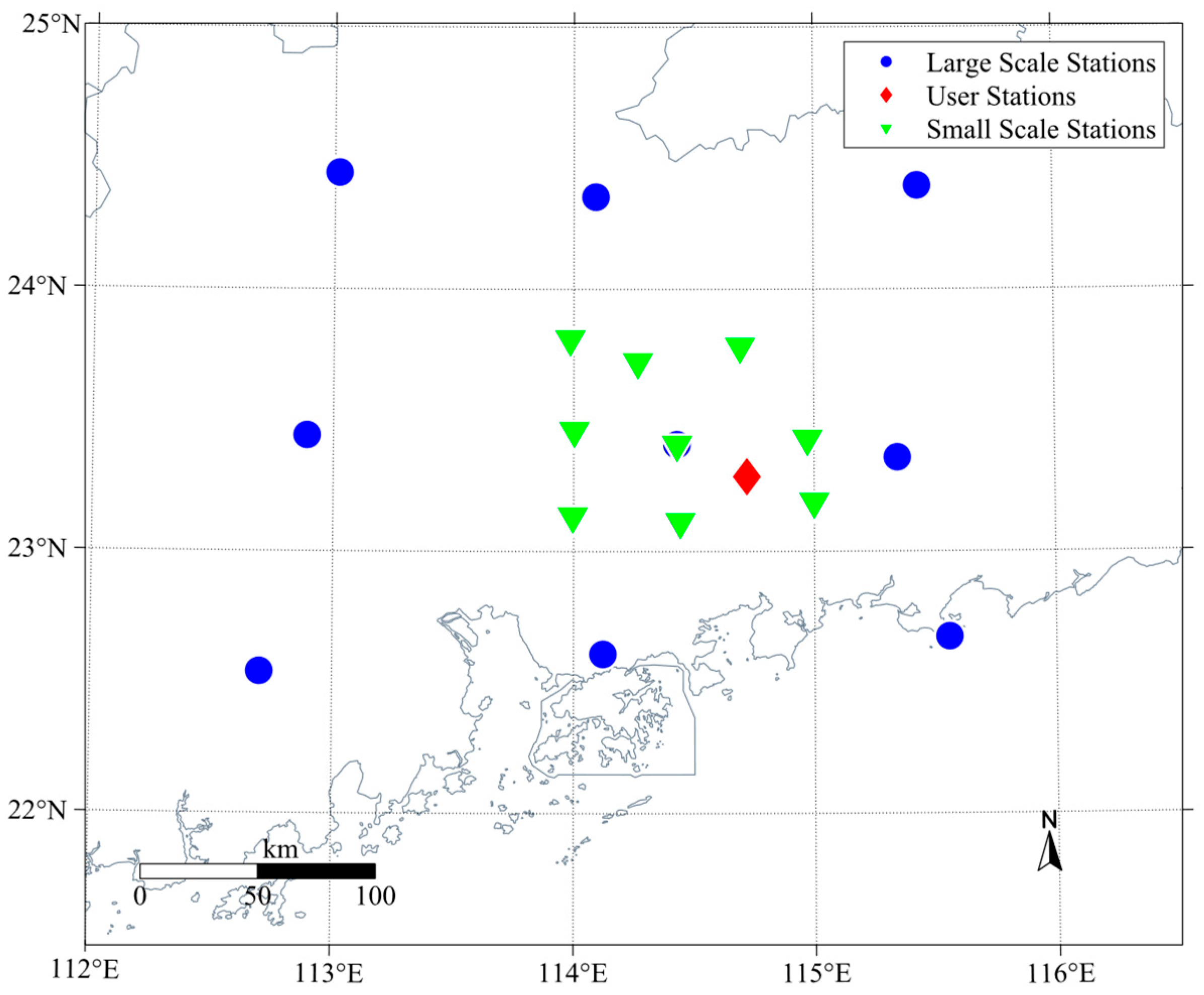
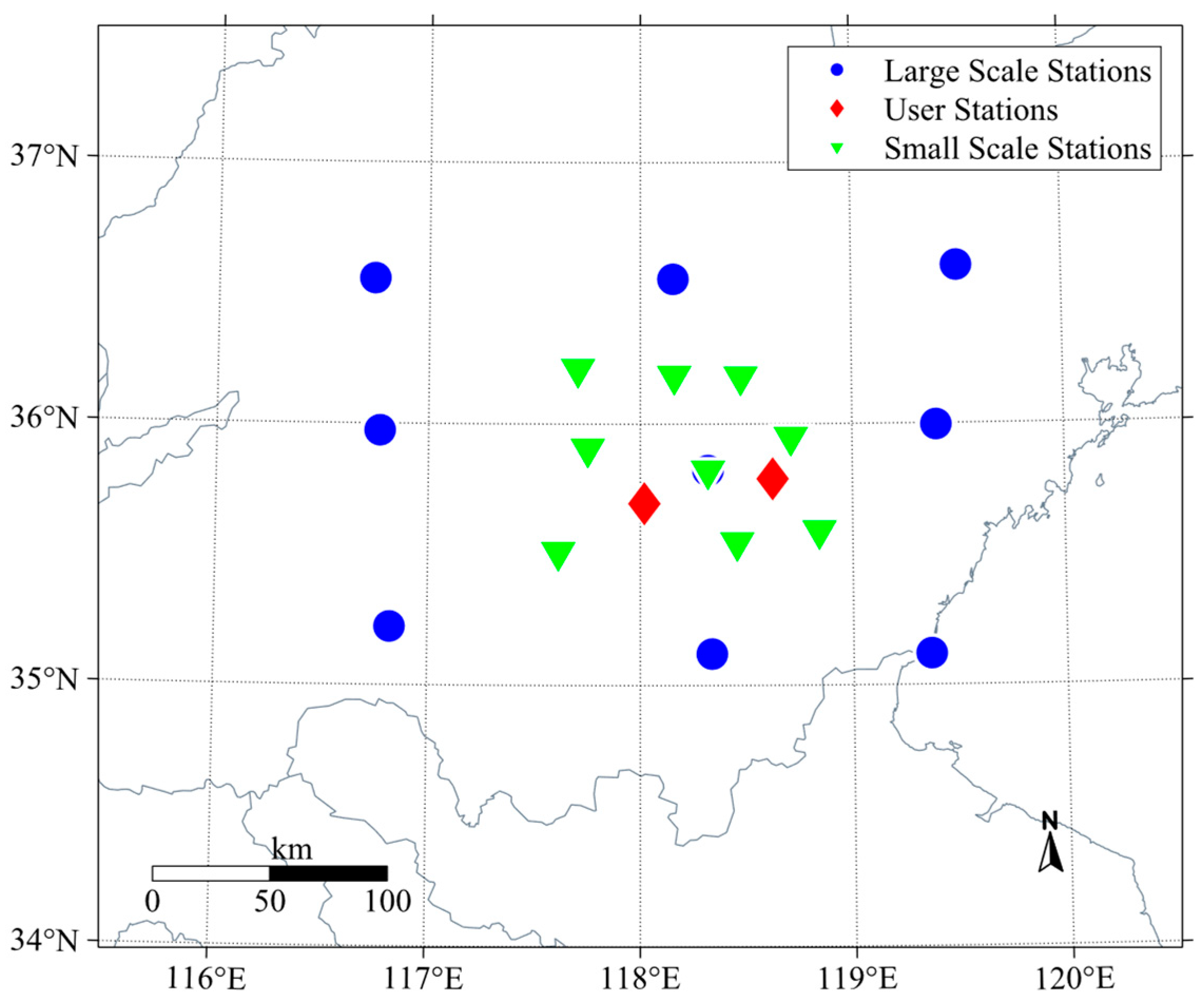
- A systematic investigation of the impact of ionospheric network grid scales (large versus small) on PPP-RTK integrity performance, conducted across diverse latitudinal regions (low-latitude—Guangdong; mid-latitude—Shandong), providing a comprehensive understanding of how modeling scale and ionospheric dynamics jointly affect PL computations;
- The development and application of a statistical modeling approach for PPP-RTK-derived ionospheric residuals, leading to the derivation of robust ionospheric integrity parameters that capture hourly spatiotemporal variability;
- The demonstration, through extensive experimental validation using real GNSS data, that incorporating these refined ionospheric integrity parameters into an ARAIM MHSS framework significantly improves PL accuracy, enhances system availability, and substantially reduces misleading and hazardous outcomes;
- The provision of a validated methodology that offers theoretical support and technical guarantees for achieving higher precision and integrity in GNSS positioning, particularly in regions susceptible to complex ionospheric activity.
2. Materials and Methods
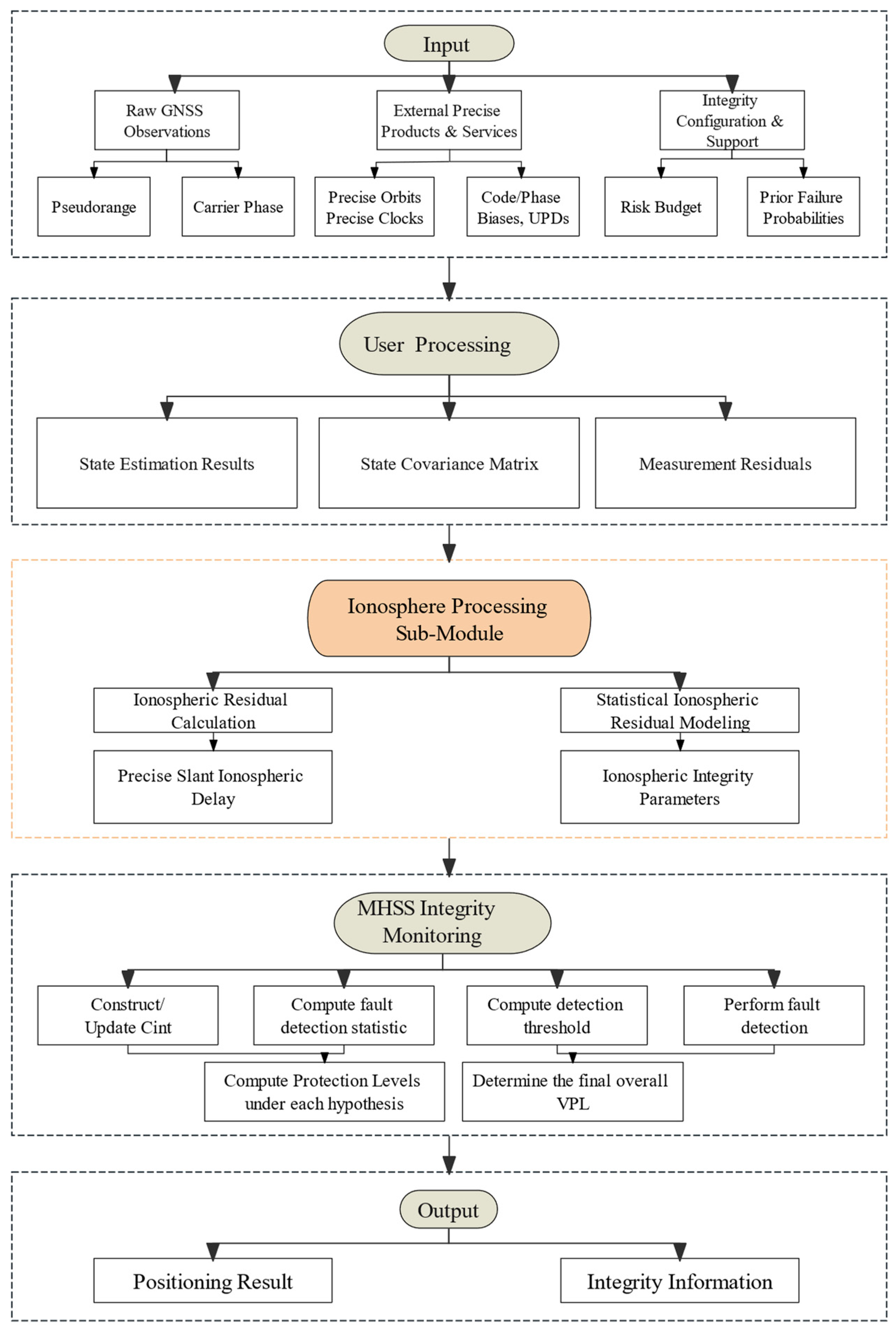
2.1. Experimental Workflow
2.2. PPP-RTK ARAIM Algorithm Based on MHSS
2.2.1. Fundamental Observation Model and State Estimation
2.2.2. Fault Detection and Protection Level Computation
2.2.3. Integrity Risk Evaluation
2.3. Statistical Ionospheric Error Modeling Using Undifferenced and Uncombined PPP-RTK for Integrity Parameter Derivation
- Ionospheric delay residuals are grouped on an hourly basis to capture their temporal characteristics. For each hourly dataset, a Laplace distribution is fitted to the residuals. The choice of the Laplace distribution is motivated by its suitability for modeling data with a sharper peak and heavier tails compared to a Gaussian distribution, characteristics often observed in ionospheric error residuals, particularly during active conditions. This fitting provides a robust estimation of the distribution’s scale parameter, which is directly related to the standard deviation (STD) for that hour and is less sensitive to outliers than a direct sample STD.
- While the Laplace distribution effectively models the bulk of the residuals, for integrity applications, a conservative overbounding model is required to account for uncharacteristically large errors. For each hour, a zero-mean Gaussian distribution is determined such that its cumulative distribution function conservatively overbounds the cumulative distribution function of the fitted Laplace distribution for the tail regions relevant to integrity. The standard deviation of this overbounding Gaussian distribution, denoted , is then taken as the equivalent STD, , for that hour. This ensures that the probability of the true error exceeding a certain bound, as predicted by the Gaussian model, is greater than or equal to the probability predicted by the Laplace or empirical distribution, providing a conservative estimate of ionospheric uncertainty.
- Using the parameters of the conservative Gaussian overbounding model determined in the previous step, the extreme error bound, , is computed. This bound corresponds to the quantile of the zero-mean Gaussian distribution associated with the target probability of hazardous misleading information allocated to the ionospheric threat for a single satellite, . For high-integrity applications, this probability is typically very small. For instance, if the integrity risk allocation for ionospheric hazardous events per satellite is , where Q is a factor, often related to the number of satellites or specific operational requirements, sometimes simplified such that the tail probability directly relates to a multiple of 10−7, then is calculated aswhere is the multiplier (quantile) obtained from the inverse standard normal distribution corresponding to the one-sided tail probability /2. For example, a tail probability on the order of 5 × 10−8 would correspond to a value of approximately 5.33 to 5.6, depending on the exact probability and whether one or two-sided bounds are considered for a particular PL equation component. This then serves as the ionospheric bias term in the PL calculations.
3. Results
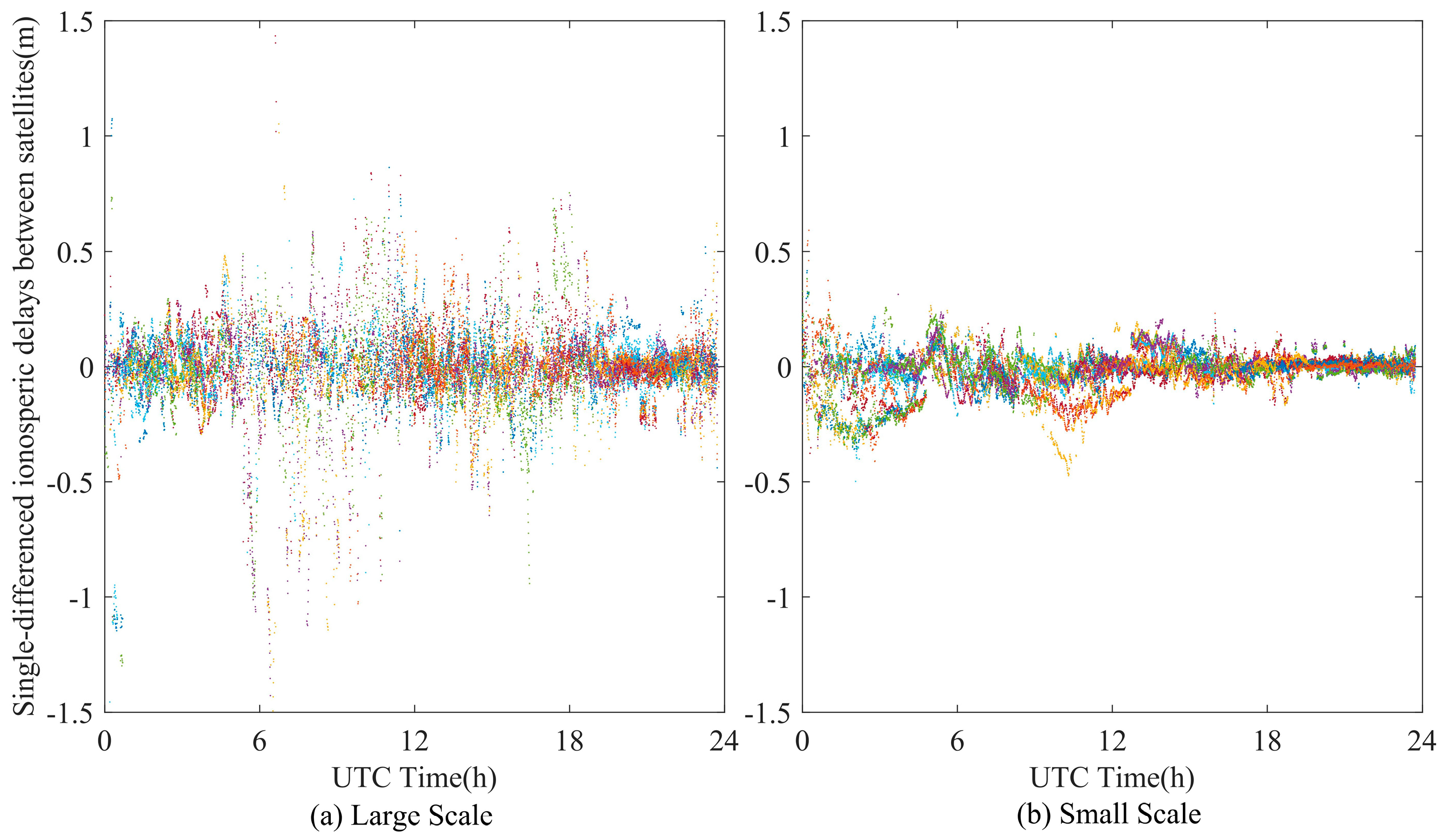
3.1. Ionospheric Modeling in Mid and Low Latitudes
3.2. User-Side Protection Level Calculation
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| GNSS | Global Navigation Satellite System |
| PPP | Precise Point Positioning |
| RTK | Real-Time Kinematic |
| PL | Protection Level |
| TEC | Total Electron Content |
| ARAIM | Advanced Receiver Autonomous Integrity Monitoring |
| MHSS | Multiple Hypothesis Solution Separation |
| P(HMI) | Probability of Hazardously Misleading Information |
| HMI | Hazardously Misleading Information |
| AL | Alert Limit |
| STD | Standard Deviation |
| LOS | Line of Sight |
| UPD | Uncalibrated Phase Delay |
| URE | User Range Error |
| HPE | Horizontal Positioning Error |
| VPE | Vertical Positioning Error |
| DOY | Day of Year |
| GBM | GFZ (German Research Centre for Geosciences) Global Bias Model |
| CAS | Chinese Academy of Sciences |
| Kp | Planetary Geomagnetic Index |
| Dst | Disturbance Storm Time Index |
References
- Working Group C. ARAIM Technical Subgroup Milestone 3 Report of the EU-US Cooperation on Satellite Navigation. Working Group C. 2016. Available online: https://www.gps.gov/policy/cooperation/europe/2016/working-group-c/ (accessed on 13 July 2023).
- Chang, J.; Qu, Z.; Lian, X.; Wang, Z. Impact of Temporally Correlated Error on ARAIM ISM During Ionospheric Storm Period. In China Satellite Navigation Conference (CSNC 2024) Proceedings; Springer Nature: Singapore, 2023; pp. 154–167. [Google Scholar] [CrossRef]
- Milner, C.; Pervan, B.; Blanch, J.; Joerger, M. Evaluating Integrity and Continuity Over Time in Advanced RAIM. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020. [Google Scholar]
- Cao, Y.; Bai, H.; Jin, K.; Zou, G. An GNSS/INS Integrated Navigation Algorithm Based on PSO-LSTM in Satellite Rejection. Electronics 2023, 12, 2905. [Google Scholar] [CrossRef]
- Chai, D.; Song, S.; Wang, K.; Bi, J.; Zhang, Y.; Ning, Y.; Yan, R. Optimization Model-Based Robust Method and Performance Evaluation of GNSS/INS Integrated Navigation for Urban Scenes. Electronics 2025, 14, 660. [Google Scholar] [CrossRef]
- Novák Sedláčková, A.; Kurdel, P.; Labun, J. Simulation of Unmanned Aircraft Vehicle Flight Precision. Transp. Res. Procedia 2020, 44, 313–320. [Google Scholar] [CrossRef]
- Ažaltovič, V.; Škvareková, I.; Pecho, P.; Kandera, B. Calculation of the Ground Casualty Risk during Aerial Work of Unmanned Aerial Vehicles in the Urban Environment. Transp. Res. Procedia 2020, 44, 271–275. [Google Scholar] [CrossRef]
- He, R.; Li, M.; Zhang, Q.; Zhao, Q. A Comparison of a GNSS-GIM and the IRI-2020 Model Over China Under Different Ionospheric Conditions. Space Weather 2023, 21, e2023SW003646. [Google Scholar] [CrossRef]
- Dao, T.; Harima, K.; Carter, B.; Currie, J.; McClusky, S.; Brown, R.; Rubinov, E.; Barassi, J.; Choy, S. Detecting Outliers in Local Ionospheric Model for GNSS Precise Positioning. GPS Solut. 2024, 28, 153. [Google Scholar] [CrossRef]
- Wang, W.; Meng, F.; Kan, B. Technology of Multi-source Autonomous Navigation System under the National Integrated PNT System. Navig. Control 2022, 21, 1–10. (In Chinese) [Google Scholar]
- Yoon, M.; Lee, J.; Pullen, S. Integrity Risk Evaluation of Impact of Ionospheric Anomalies on GAST D GBAS. In Proceedings of the 2019 International Technical Meeting of The Institute of Navigation, Reston, VA, USA, 28–31 January 2019. [Google Scholar]
- Kim, E.; Song, J.; Shin, Y.; Kim, S.; Son, P.-W.; Park, S.; Park, S. Fault-Free Protection Level Equation for CLAS PPP-RTK and Experimental Evaluations. Sensors 2022, 22, 3570. [Google Scholar] [CrossRef]
- Mukhtarov, P.; Pancheva, D.; Andonov, B.; Pashova, L. Global TEC maps based on GNNS data: 2. Model evaluation. J. Geophys. Res. Space Phys. 2013, 118, 4609–4617. [Google Scholar] [CrossRef]
- Zha, J.; Zhang, B.; Liu, T.; Hou, P. Ionosphere-weighted undifferenced and uncombined PPP-RTK: Theoretical models and experimental results. GPS Solut. 2021, 25, 128. [Google Scholar] [CrossRef]
- Liu, X.; Yuan, Y.; Tan, B.; Li, M. Observational Analysis of Variation Characteristics of GPS-Based TEC Fluctuation over China. ISPRS Int. J. Geo-Inf. 2016, 5, 237. [Google Scholar] [CrossRef]
- Chen, J.; Huang, L.; Liu, L.; Wu, P.; Qin, X. Applicability Analysis of VTEC Derived from the Sophisticated Klobuchar Model in China. ISPRS Int. J. Geo-Inf. 2017, 6, 75. [Google Scholar] [CrossRef]
- Cai, X.; Burns, A.G.; Wang, W.; Qian, L.; Pedatella, N.; Coster, A.; Zhang, S.; Solomon, S.C.; Eastes, R.W.; Daniell, R.E.; et al. Variations in Thermosphere Composition and Ionosphere Total Electron Content Under “Geomagnetically Quiet” Conditions at Solar-Minimum. Geophys. Res. Lett. 2021, 48, e2021GL093300. [Google Scholar] [CrossRef]
- Borries, C.; Berdermann, J.; Jakowski, N.; Wilken, V. Ionospheric Storms-A Challenge for Empirical Forecast of the Total Electron Content. J. Geophys. Res. Space Phys. 2015, 120, 3175–3186. [Google Scholar] [CrossRef]
- Jeong, S.-H.; Lee, W.K.; Kil, H.; Jang, S.; Kim, J.; Kwak, Y. Deep Learning-Based Regional Ionospheric Total Electron Content Prediction—Long Short-Term Memory (LSTM) and Convolutional LSTM Approach. Space Weather 2024, 22, e2023SW003763. [Google Scholar] [CrossRef]
- Wang, S.; Zhan, X.; Xiao, Y.; Zhai, Y. Integrity Monitoring of PPP-RTK Based on Multiple Hypothesis Solution Separation. In China Satellite Navigation Conference (CSNC 2022) Proceedings; Springer: Singapore, 2022; pp. 321–331. [Google Scholar] [CrossRef]
- Gao, Z.; Li, Y.; Chen, L. UWB Indoor Reliable Positioning Method Considering Spatial Distribution and NLOS Effects. Navig. Position. Timing 2023, 10, 16–24. (In Chinese) [Google Scholar] [CrossRef]
- Blanch, J.; Walter, T.; Enge, P.; Lee, Y.; Pervan, B.; Rippl, M.; Spletter, A.; Kropp, V. Baseline advanced RAIM user algorithm and possible improvements. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 713–732. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, J. Integrity Monitoring Scheme for Single-Epoch GNSS PPP-RTK Positioning. Satell. Navig. 2023, 4, 10. [Google Scholar] [CrossRef]
- Blanch, J.; Walter, T.; Enge, P. Protection Levels after Fault Exclusion for Advanced RAIM. Navigation 2017, 64, 505–513. [Google Scholar] [CrossRef]
- Hu, T.; Zhang, G.; Zhong, L. Software Design for Airborne GNSS Air Service Performance Evaluation under Ionospheric Scintillation. Electronics 2023, 12, 3713. [Google Scholar] [CrossRef]
- Wang, S.; Zhai, Y.; Zhan, X. Characterizing BDS signal-in-space performance from integrity perspective. Navigation 2021, 68, 157–183. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, J.; El-Mowafy, A.; Rizos, C. Integrity monitoring scheme for undifferenced and uncombined multi-frequency multi-constellation PPP-RTK. GPS Solut. 2023, 27, 68. [Google Scholar] [CrossRef]
- Xue, B.; Yuan, Y.; Wang, H.; Wang, H. Evaluation of the Integrity Risk for Precise Point Positioning. Remote Sens. 2022, 14, 128. [Google Scholar] [CrossRef]
- Zhang, B.; Chen, Y.; Yuan, Y. PPP-RTK based on undifferenced and uncombined observations: Theoretical and practical aspects. J. Geod. 2019, 93, 1011–1024. [Google Scholar] [CrossRef]
- Psychas, D.; Verhagen, S.; Liu, X.; Memarzadeh, Y.; Visser, H. Assessment of ionospheric corrections for PPP-RTK using regional ionosphere modelling. Meas. Sci. Technol. 2019, 30, 014001. [Google Scholar] [CrossRef]
- Zhao, L.; Douša, J.; Václavovic, P. Accuracy Evaluation of Ionospheric Delay from Multi-Scale Reference Networks and Its Augmentation to PPP during Low Solar Activity. ISPRS Int. J. Geo-Inf. 2021, 10, 516. [Google Scholar] [CrossRef]
- Zhang, W.; Wang, J.; Khodabandeh, A. Regional ionospheric correction generation for GNSS PPP-RTK: Theoretical analyses and a new interpolation method. GPS Solut. 2024, 28, 139. [Google Scholar] [CrossRef]
- Psychas, D.; Verhagen, S. Real-Time PPP-RTK Performance Analysis Using Ionospheric Corrections from Multi-Scale Network Configurations. Sensors 2020, 20, 3012. [Google Scholar] [CrossRef]
- Li, X.; Han, J.; Li, X.; Huang, J.; Shen, Z.; Wu, Z. A grid-based ionospheric weighted method for PPP-RTK with diverse network scales and ionospheric activity levels. GPS Solut. 2023, 27, 191. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Parameters | Value |
|---|---|---|
| Prior Probabilities | (Satellite j fault) | |
| (Constellation j fault) | ||
| (Ionospheric anomaly i) | ||
| (Tropospheric anomaly) | ||
| URE Standard Deviations | ||
| Other Integrity Parameters | (Nominal bias bound) | |
| (Detection threshold allocation) |
| PL 1 | PL 2 | |
|---|---|---|
| Normal | 60.50% | 94.70% |
| Misleading | 35.20% | 4.10% |
| Hazardous | 2.80% | 0.50% |
| Unavailable | 1.50% | 0.70% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tang, T.; Xiang, Y.; Lyu, S.; Zhao, Y.; Yu, W. Statistical Modeling of PPP-RTK Derived Ionospheric Residuals for Improved ARAIM MHSS Protection Level Calculation. Electronics 2025, 14, 2340. https://doi.org/10.3390/electronics14122340
Tang T, Xiang Y, Lyu S, Zhao Y, Yu W. Statistical Modeling of PPP-RTK Derived Ionospheric Residuals for Improved ARAIM MHSS Protection Level Calculation. Electronics. 2025; 14(12):2340. https://doi.org/10.3390/electronics14122340
Chicago/Turabian StyleTang, Tiantian, Yan Xiang, Sijie Lyu, Yifan Zhao, and Wenxian Yu. 2025. "Statistical Modeling of PPP-RTK Derived Ionospheric Residuals for Improved ARAIM MHSS Protection Level Calculation" Electronics 14, no. 12: 2340. https://doi.org/10.3390/electronics14122340
APA StyleTang, T., Xiang, Y., Lyu, S., Zhao, Y., & Yu, W. (2025). Statistical Modeling of PPP-RTK Derived Ionospheric Residuals for Improved ARAIM MHSS Protection Level Calculation. Electronics, 14(12), 2340. https://doi.org/10.3390/electronics14122340