Service Robots in Catering Applications: A Review and Future Challenges

 ,
,  , , and
, , and
Abstract
1. Introduction
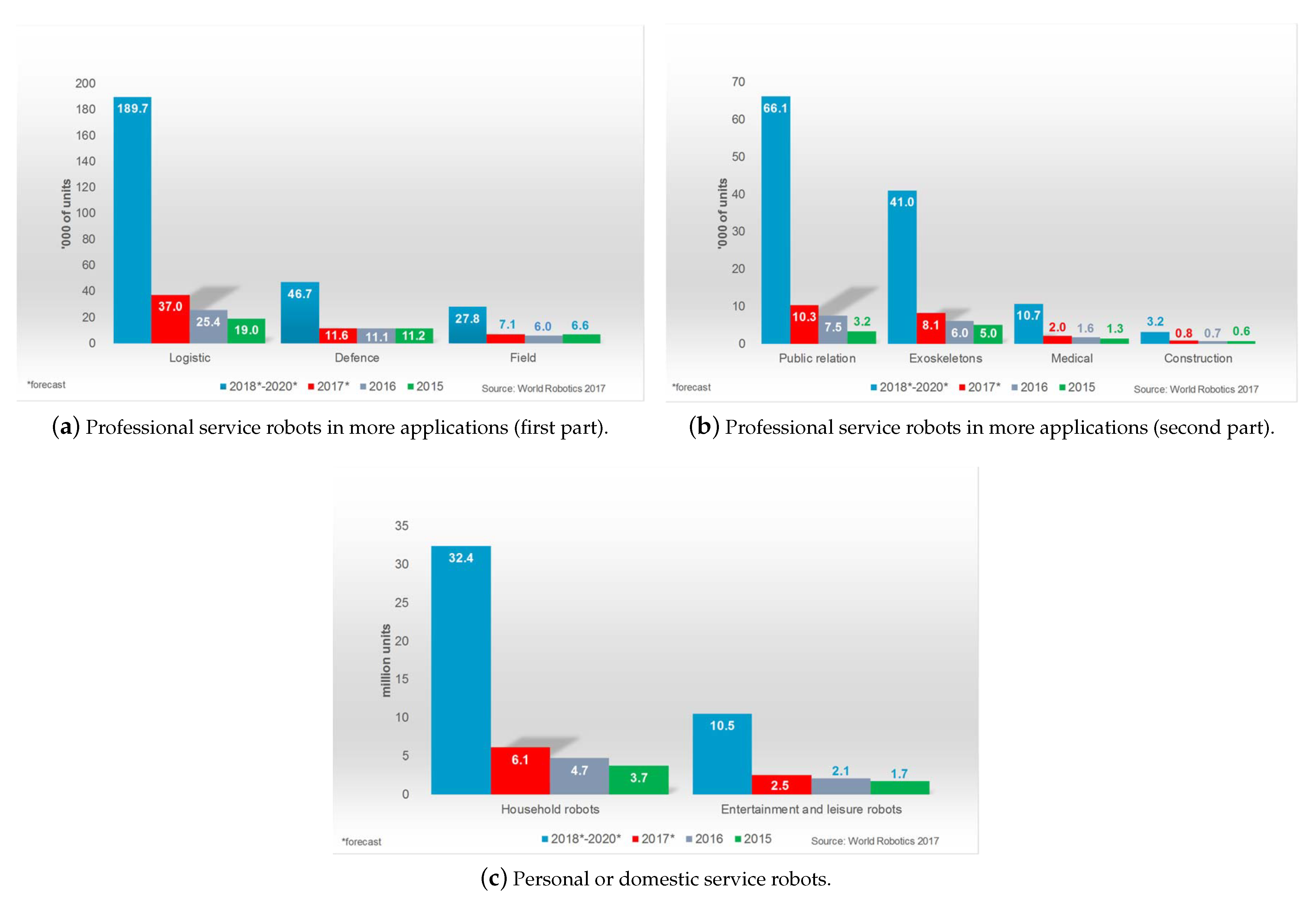
2. Service Robots Statistics
3. Classification of Service Robots
3.1. Professional Service Robots
- (A)
- Defence Robots
- (B)
- Field Robots
- (C)
- Robots in medical settings
- (D)
- Logistic Robotic Systems
- (E)
- Maintenance Robots
3.2. Personal Service Robots
- (F)
- Social Robots
- (G)
- Domestic Cleaner Robots
- (H)
- Research/Educational/Competition Robots
- (I)
- Assistance Robots
- (J)
- Therapeutic Robots
4. An Emerging Class of Service Robot: Catering Robotics
4.1. Classification of Catering Robots
4.1.1. Robochefs
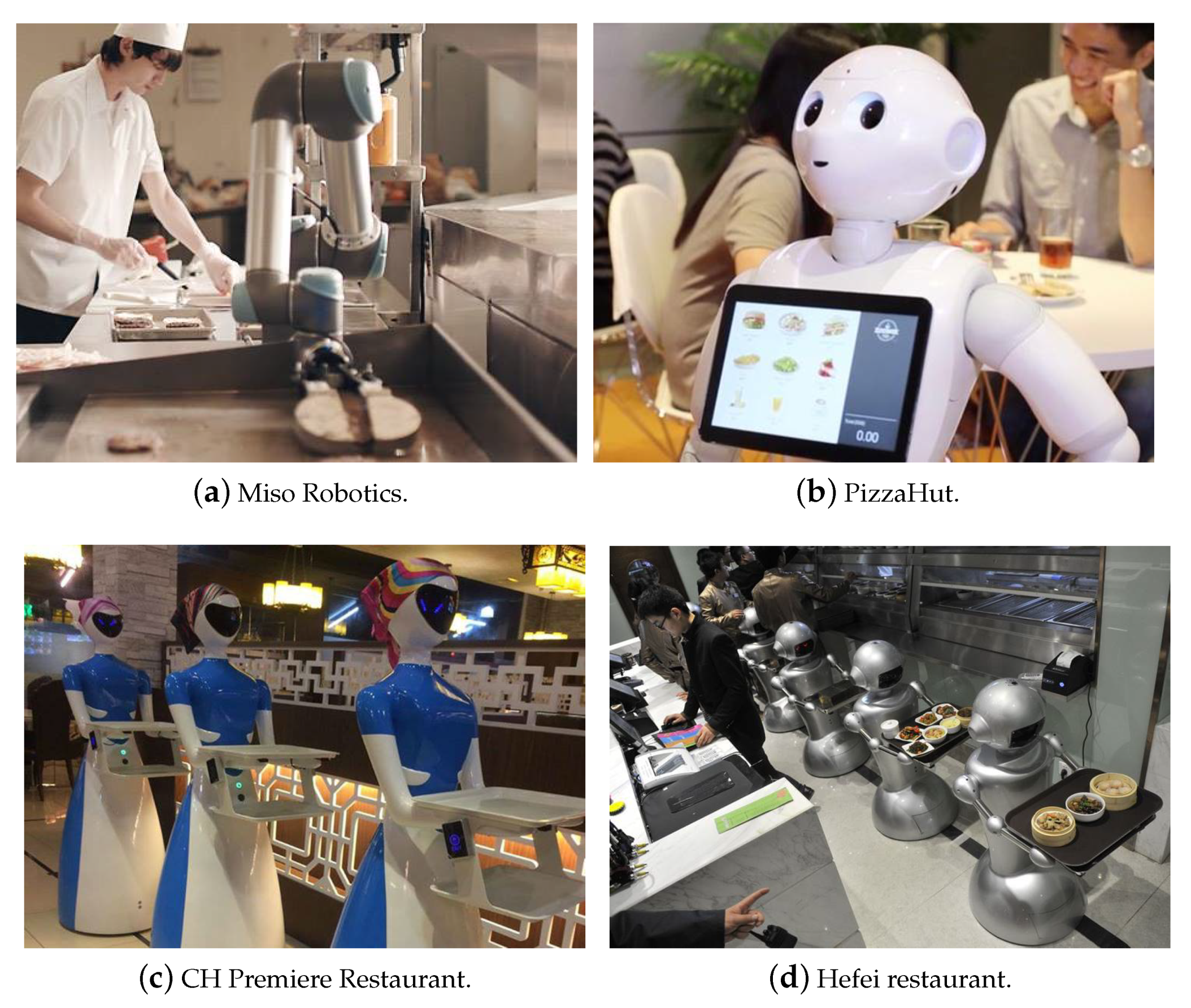
4.1.2. Robowaiters
4.2. Challenges for a Waiter Robot
- By humans, for humans. The objects and the environment are adapted perfectly to humans and their capabilities.
- Presence of people. The robot can be close to users while they move.
- Other actors. Other robots can collaborate.
- Conditions of the object. The objects can be located in different places at different times, or even change in shape and size.
- Architectural obstacles. The robot can be encountered with doors or stairs.
- Sensory variations. Some examples are changes in brightness, background sounds, or dirty surfaces.
- Dynamic variations. The scenario may change independently of the robot interaction.
- Real-Time Constraints. The robot must know the implicit environment restrictions.
- Use of tools. Some tasks require the use of particular tools.
5. The Approach to Develop a Waiter Robot
- Take orders from guests like food and drinks
- Deliver orders to the correct customer.
- Welcome clients at the entrance.
- Guide customers to their seats.
- Cheer clients up by recognising their mood.
- Take reservations for the seat.
- Grasp dishes or drinks.
- More duties …
5.1. The Architecture for the Waiter Robot
- “On Human Form”. Human scenarios are usually suitably adapted to the shape of human beings. Sometimes, benefiting of these conditions, humanoid robots are able to make easier handling works. For instance, in the human scenarios, we can find different objects over a horizontal surface in most case. A human could reach them adequately in these locations. In the same way, a humanoid should recognise and handle these objects more efficiently if its manipulator touch or its sensors point to this horizontal plane. Obviously, all the objects manufactured are conceived to be used by a human hand. So, we will design grippers with a variety of grip ranges to handle multiples and different objects.A logical method to implement humanoids that emulate the human shape is taking advantage of the features of the scenarios where humans live. In this way, the waiter robot could go upstairs, or open doors locate dishes on the table or kitchen or interact in a friendly way with guests (Figure 9) [60,61,62].
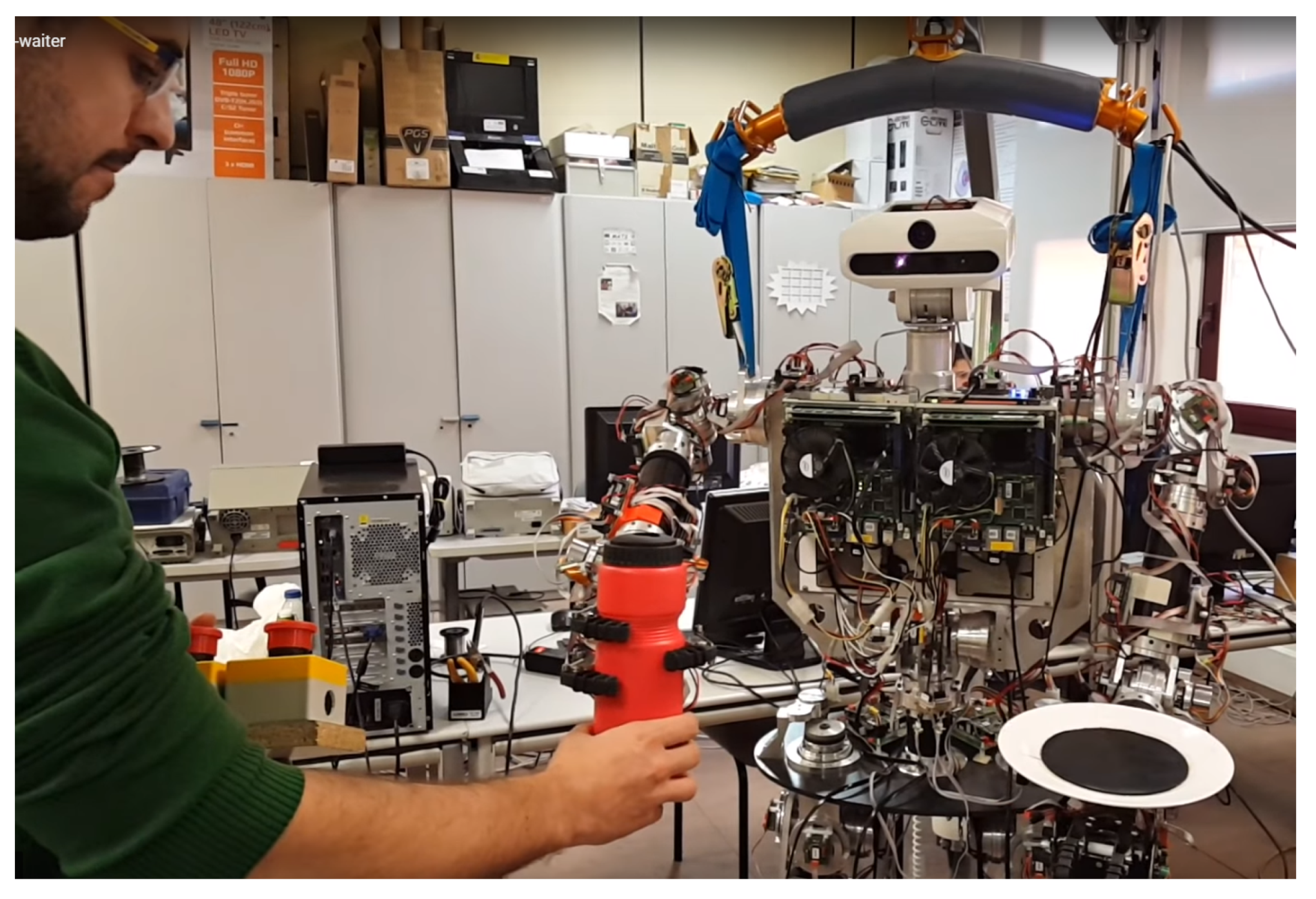
- “Designing for Uncertainty”. Traditionally, industrial robots have avoided compliance control for the robot at the expense of stiff, precise, and fast operation. This one is a compromise on the design when the state of the job is known. Force and compliance control is more profitable for collaboration with customers safely in human scenarios. It can be applied while examining the environment or coping with uncertainty.In the design of a robot hand, a good example could be the optimisation of different parameters. The idea can consist of improving object grasp with uncertain physical properties. We can build a hand out of compliant elements of variable stiffness. We can incorporate position or tactile sensors or include tendons for the actuation. Combining the compliance of the hand and a new versatility, we could make robust grasping. Even it could grasp different objects with sensing uncertainties.Our humanoid robot developed by the “RoboticsLab” research group uses F-T (Force–Torque) sensors in both wrists of the arms. These sensors offer the possibility to have a compliant control of the tray of the waiter robot. This compliance allows us to work in unknown environments (external disturbance) and to adapt to geometric uncertainty (balance position). On our robot TEO, this compliant control helps to control the stability of the transported object in an unknown scenario where the robot can be disturbed by human’s hit, the whole-body controller, or the own balance control of the object [63,64].
- “Safety”. Robots have to be safe if they work with people. In the traditional industry, robots with manipulation are hazardous, so it is generally forbidden to enter into the workspace of a robot when working. The damage generally happens during accidental physical contact. Above all, impacts are the most critical, and those depend on the speed, mass and other characteristics of the robot [65].There are already companies that are adding some security elements to their robots. Some examples of such companies are Neuronics or KUKA. In the case of Neuronics, the Katana robot has been developed. Its safety methods are based on the use of lightweight materials, low speeds and low power. In the case of KUKA, the IIWA arm is a robot with a compliance controller. The controller is capable of adjusting its compliance using the feedback of its torque sensors.Other methods are based on mechanical safety like the Manus robot. This robot has some current limiters in the motors to avoid the forces of impact. In the case of the waiter robot, the ability to adjust the compliance of the body will allow better control of the stability of the robot and the transported object [66,67,68].
5.2. Interaction between Humans and Robots
- “Facial expression”. The identification of facial expression allows a waiter robot a natural way of interacting with clients. Robots can use this tool to know if their actions are executed correctly or to express empathy. Nevertheless, we must address some challenges before a waiter robot could fully employ this method of communication.
- “Acoustic localisation”. Based on acoustics and for humans, talking is an effortless way to communicate. Therefore, verbal communication is apparently the most intuitive way to communicate with a waiter robot. In this regard, a robot that can listen and talk will develop a robust interaction with humans [76].
- “Pointing gestures”. This one is another promising and intuitive way of communication [77,78]. Signalling with a gesticulation can show objects, locations, or the number of orders of the same drink for an application of a waiter robot. Describing the shape of an object or its localisation verbally can be more difficult and less precise than pointing the object [79]. However, pointing gestures are not easy to recognise [80]. The difficulty lies in a precise 3D detection of the positions of hands or the face in motion of a new client in a non-static environment under unknown and changing lighting conditions. Besides, the identification of a designated point at the appropriate moment is complex when the client is signalling the point.
5.3. Robot Motion Planning
- “Robot location”. For the question “Where am I in the restaurant?”, robot location gives the solution. For the question “how should I get to the table?”, The route planning gives the solution. Or even, “where am I going?” In the end, the process of construction and interpretation of the map defines the geometric representation of the scenario of the robot.Related to the waiter robot’s reference frame, the idea is to describe the position in the restaurant. This operation is necessary to know the position of tables, doors, or even people moving.
- “Path planning”. This one can be local or global. On the one hand, the planning of the local route is applied to dynamic scenarios. While the robot is obtaining sensory information and walking, this one is planning. Moreover, a different route is created if the environment has changed.On the other hand, the planning of the global trajectory can only be done if the environment is static, without modifications. In this case, the robot knows the scenario correctly.
- “Motion planning”. This one is related to the method of selection of movements and their corresponding inputs. At the same time, all restrictions must be met (avoidance of obstacles, avoidance of risks, etc.).Motion planning can be described as an algorithm based on a set of computations. These computations provide sub-objectives or set points for robot control. These computations and the resulting plans are based on a proper model of the robot and the environment in which it is moving [86].
5.4. Plan Execution
- Move to a table.
- Look for a proper workspace.
- Manipulate food and drinks.
- Come back and so on.
- “Pre-programmed capabilities”. In this procedure, the robotic platform has pre-programmed skills, like navigating to the kitchen, following a person, serve a drink, etc. Related to this strategy and based on commands, the robotic platform could do these works. Nevertheless, at the end, the solution of the performance of more and different intricate works in dynamical environments would be impossible.
- “Plan execution system”. The other method is to use a plan execution system. With the composition of different pre-programmed robot capacities, this plan execution system concedes the resolution of intricate tasks. For the domain of the waiter robots, it can be quite complex if all the objects should be modelled within the planning area (tables, chairs, other waiters, dishes, cutlery). This complicated domain can do the planning issue unmanageable.A deliberative system supports the translation process (from actions to commands). Here, the plan execution system might request extra data to interpret the responses. For instance, it is possible to claim the deliberative system the position of other waiters or the location of the table where the chips should be served. The plan execution supervises the performance of the task to check if the objective is reached. In the case of a non-repairable failure, it will request the planning system to produce a new plan [44,90,91,92,93].
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Litzenberger, G. Service Robots. International Federation of Robotics. 2018. Available online: https://ifr.org/service-robots (accessed on 10 December 2020).
- International Organization for Standardization. ISO 8373:2012—Robots and Robotic Devices—Vocabulary. 2012. Available online: https://www.iso.org/standard/55890.html (accessed on 10 December 2020).
- Robotics, W. Executive Summary World Robotics 2017 Industrial Robots. In World Robotic Report—International Federation of Robotics; International Federation of Robotics: Frankfurt, Germany, 2017; pp. 15–24. Available online: https://ifr.org/downloads/press/Executive_Summary_WR_2017_Industrial_Robots.pdf (accessed on 10 December 2020).
- Fregene, K. Unmanned aerial vehicles and control: Lockheed Martin Advanced Technology Laboratories. IEEE Control Syst. 2012, 32, 32–34. [Google Scholar] [CrossRef]
- Martinic, G. The proliferation, diversity and utility of ground-based robotic technologies. Can. Mil. J. 2014, 14, 52. [Google Scholar]
- Barrett, K. Weaver Dairy’s well thought-out modernization. DairyBusiness East 2014, 28–29. Available online: https://ecommons.cornell.edu/bitstream/handle/1813/37342/28.pdf?sequence=2 (accessed on 10 December 2020).
- Aiko, H. Nursing Care Robot Lends a Helping Hand. 2011. Available online: https://www.nippon.com/en/features/c00502/ (accessed on 10 December 2020).
- Neckel, N.; Wisman, W.; Hidler, J. Limb alignment and kinematics inside a lokomat robotic orthosis. In Proceedings of the Annual International Conference of the IEEE Engineering in Medicine and Biology—Proceedings, New York City, NY, USA, 31 August–3 September 2006; pp. 2698–2701. [Google Scholar] [CrossRef]
- Kilby, W.; Dooley, J.R.; Kuduvalli, G.; Sayeh, S.; Maurer, C.R. The CyberKnife® robotic radiosurgery system in 2010. Technol. Cancer Res. Treat. 2010, 9, 433–452. [Google Scholar] [CrossRef]
- Cardona, M.; Cortez, F.; Palacios, A.; Cerros, K. Mobile Robots Application Against Covid-19 Pandemic. In Proceedings of the 2020 IEEE ANDESCON, Quito, Ecuador, 13–16 October 2020; pp. 1–5. [Google Scholar]
- Engelking, C. Meet YuMi: A Robot Nurse Built to Make the Rounds. 2019. Available online: https://www.discovermagazine.com/technology/meet-yumi-a-robot-nurse-built-to-make-the-rounds (accessed on 10 December 2020).
- Andrea, R.D.; Wurman, P. Future Challenges of Coordinating Hundreds of Autonomous Vehicles in Distribution Facilities. In Proceedings of the IEEE International Conference on Technologies for Practical Robot Applications (TePRA 2008), Woburn, MA, USA, 10–11 November 2008; pp. 80–83. [Google Scholar] [CrossRef]
- Derlukiewicz, D.; Cieślak, M. Study of the causes of boom elements cracking of electric demolition machine with use of experimental and numerical methods. Lect. Notes Mech. Eng. 2017, 10, 109–119. [Google Scholar] [CrossRef]
- Shen, C.; Hang, L.; Wang, J.; Qin, W.; Huangfu, Y.; Huang, X.; Wang, Y. Modeling and Analysis on Position and Gesture of End-Effector of Cleaning Robot Based on Monorail Bogie for Solar Panels. In Proceedings of the International Conference on Intelligent Robotics and Applications, Shenyang, China, 8–11 August 2016; pp. 122–133. [Google Scholar] [CrossRef]
- Choi, S.; Rossano, G.F.; Zhang, G.; Fuhlbrigge, T. Service Robots: An Industrial Perspective. In Proceedings of the 2015 IEEE International Conference on Technologies for Practical Robot Applications (TePRA), Woburn, MA, USA, 11–12 May 2015. [Google Scholar] [CrossRef]
- Salichs, J.; Castro-González, A.; Salichs, M.A. Infrared Remote Control with a Social Robot. FIRA RoboWorld Congr. 2009, 44, 86–95. [Google Scholar] [CrossRef]
- Ferro, F.; Marchionni, L. REEM: A Humanoid Service Robot. In ROBOT2013: First Iberian Robotics Conference; Springer: Madrid, Spain, 2014; Volume 252, pp. 521–525. [Google Scholar] [CrossRef]
- Keller, J.C. Engineer/Entrepreneur Inspired by R2-D2. IEEE Women Eng. Mag. 2008, 2, 28–30. [Google Scholar] [CrossRef]
- Gualotuña, R.; LLinín, E. Implementación de un Algoritmo de Búsqueda Informada en el Robot móvil Robotino de Festo para la Obtención de la Trayectoria mas Óptima en Tiempo Real Dentro de un Entorno Controlado. Ph.D. Thesis, Universidad Politécnica Salesiana, Salesiana, Ecuador, 2011. [Google Scholar]
- Pérula-Martínez, R.; Garcia-Haro, J.M.; Balaguer, C.; Salichs, M.A. Developing Educational Printable Robots to Motivate University Students Using Open Source Technologies. J. Intell. Robot. Syst. 2016, 81, 25–39. [Google Scholar] [CrossRef]
- Englsberger, J.; Werner, A.; Ott, C.; Henze, B.; Roa, M.A.; Garofalo, G.; Burger, R.; Beyer, A.; Eiberger, O.; Schmid, K.; et al. Overview of the torque-controlled humanoid robot TORO. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots, Madrid, Spain, 18–20 November 2014; pp. 916–923. [Google Scholar] [CrossRef]
- Asfour, T.; Regenstein, K.; Azad, P.; Schröder, J.; Bierbaum, A.; Vahrenkamp, N.; Dillmann, R. ARMAR-III: An integrated humanoid platform for sensory-motor control. In Proceedings of the 2006 6th IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS), Genova, Italy, 4–6 December 2006; pp. 169–175. [Google Scholar] [CrossRef]
- Jardón, A.; Giménez, A.; Correal, R.; Martinez, S.; Balaguers, C. Asibot: Robot portátil de asistencia a discapacitados. concepto, arquitectura de control y evaluación clínica. Rev. Iberoam. Autom. Inform. Ind. RIAI 2008, 5, 48–59. [Google Scholar] [CrossRef][Green Version]
- Cooper, S.; Di Fava, A.; Vivas, C.; Marchionni, L.; Ferro, F. ARI: The Social Assistive Robot and Companion. In Proceedings of the 2020 29th IEEE International Conference on Robot and Human Interactive Communication (RO-MAN), Naples, Italy, 31 August–4 September 2020; pp. 745–751. [Google Scholar]
- Oña, E.D.; Garcia-Haro, J.M.; Jardón, A.; Balaguer, C. Robotics in health care: Perspectives of robot-aided interventions in clinical practice for rehabilitation of upper limbs. Appl. Sci. 2019, 9, 2586. [Google Scholar] [CrossRef]
- Salichs, M.A.; Castro-González, Á.; Salichs, E.; Fernández-Rodicio, E.; Maroto-Gómez, M.; Gamboa-Montero, J.J.; Marques-Villarroya, S.; Castillo, J.C.; Alonso-Martín, F.; Malfaz, M. Mini: A New Social Robot for the Elderly. Int. J. Soc. Robot. 2020, 12, 1–19. [Google Scholar] [CrossRef]
- Salichs, M.A.; Encinar, I.P.; Salichs, E.; Castro-González, Á.; Malfaz, M. Study of Scenarios and Technical Requirements of a Social Assistive Robot for Alzheimer’s Disease Patients and Their Caregivers. Int. J. Soc. Robot. 2016, 8, 85–102. [Google Scholar] [CrossRef]
- Bützer, T.; Lambercy, O.; Arata, J.; Gassert, R. Fully Wearable Actuated Soft Exoskeleton for Grasping Assistance in Everyday Activities. Soft Robot. 2020. [Google Scholar] [CrossRef]
- United States of America. Bureau of Labor Statistics. 2017. Available online: https://www.bls.gov/ (accessed on 10 December 2020).
- Flyppy. Miso Robotics. 2017. Available online: http://www.misorobotics.com/ (accessed on 10 December 2020).
- Srinivasa, S.S.; Ferguson, D.; Helfrich, C.J.; Berenson, D.; Collet, A.; Diankov, R.; Gallagher, G.; Hollinger, G.; Kuffner, J.; Weghe, M.V. HERB: A home exploring robotic butler. Auton. Robot. 2010, 28, 5–20. [Google Scholar] [CrossRef]
- Meeussen, W.; Wise, M.; Glaser, S.; Chitta, S.; McGann, C.; Mihelich, P.; Marder-Eppstein, E.; Muja, M.; Eruhimov, V.; Foote, T.; et al. Autonomous door opening and plugging in with a personal robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 729–736. [Google Scholar] [CrossRef]
- Bohren, J.; Rusu, R.B.; Jones, E.G.; Marder-Eppstein, E.; Pantofaru, C.; Wise, M.; Mösenlechner, L.; Meeussen, W.; Holzer, S. Towards autonomous robotic butlers: Lessons learned with the PR2. In Proceedings of the IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 5568–5575. [Google Scholar] [CrossRef]
- Reiser, U.; Connette, C.; Fischer, J.; Kubacki, J.; Bubeck, A.; Weisshardt, F.; Jacobs, T.; Parlitz, C.; Hagele, M.; Verl, A. Care-O-bot® 3—Creating a product vision for service robot applications by integrating design and technology. In Proceedings of the 2009 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2009), St. Louis, MO, USA, 10–15 October 2009; pp. 1992–1998. [Google Scholar] [CrossRef]
- Plöger, P.G.; Pervölz, K.; Mies, C.; Eyerich, P.; Brenner, M.; Nebel, B. The DESIRE Service Robotics Initiative. KI Z. 2008, 22, 29–32. [Google Scholar]
- Pontaza, D. Estas Robots Ofrecen Servicio de Camareras en una Pizzería. TecReview. 2017. Available online: http://tecreview.itesm.mx/estas-robots-ofrecen-servicio-camareras-en-una-pizzeria/ (accessed on 10 December 2020).
- Nguyen, C. Chinese Restaurants Are Replacing Waiters with Robots. Tech Insider. 2016. Available online: https://www.businessinsider.com/chinese-restaurant-robot-waiters-2016-7#they-cost-around-11310-each-when-they-were-bought-in-2014-2 (accessed on 10 December 2020).
- Curtis, S. Pizza Hut Hires ROBOT Waiters to Take Orders and Process Payments at Its Fast-Food Restaurants. Mirror Online. 2016. Available online: http://www.mirror.co.uk/tech/pizza-hut-hires-robot-waiters-8045172 (accessed on 10 December 2020).
- Yap, N. This Kuching Restaurant Has Robot Waiters to Serve You. TheHypedGeek. 2016. Available online: http://thehypedgeek.com/kuching-restaurant-robot-waiters/ (accessed on 10 December 2020).
- Puerto, K. Un Equipo de Robots Camarero del MIT Sirve la Cerveza de Forma Eficiente. Xataka. 2015. Available online: https://www.xataka.com/robotica-e-ia/un-equipo-de-robots-camarero-del-mit-sirve-la-cerveza-de-forma-eficiente (accessed on 10 December 2020).
- Asenador, S.H. La Tecnología se Cuela en el Menú de los Restaurantes del Futuro. Expansión. 2016. Available online: http://www.expansion.com/empresas/distribucion/2016/09/18/579cd07b22601d92408b4604.html (accessed on 10 December 2020).
- Rob Price. A Line of Robot Waiters Did Such a Terrible Job That They Forced 2 Restaurants to Close Down. Business Insider. 2016. Available online: https://www.businessinsider.com.au/two-restaurants-close-down-due-to-terrible-robot-waiters-china-2016-4 (accessed on 10 December 2020).
- Coffrini, F. Restaurantes de China Despiden a sus Camareros Robot por su bajo Rendimiento. elPeriodico. 2016. Available online: http://www.elperiodico.com/es/extra/20160406/restaurantes-de-china-despiden-a-sus-camareros-robot-por-su-bajo-rendimiento-5031623 (accessed on 10 December 2020).
- Garcia-Haro, J.M.; Martinez, S.; Balaguer, C. Balance Computation of Objects Transported on a Tray by a Humanoid Robot Based on 3D Dynamic Slopes. In Proceedings of the 2018 IEEE-RAS 18th International Conference on Humanoid Robots (Humanoids), Beijing, China, 6–9 November 2018; pp. 704–709. [Google Scholar] [CrossRef]
- Ray, C.; Mondada, F.; Siegwart, R. What do people expect from robots? In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Nice, France, 22–26 September 2008; pp. 3816–3821. [Google Scholar] [CrossRef]
- Spyce. Culinary Excellence Elevated by Technology. 2018. Available online: https://www.spyce.com/ (accessed on 10 December 2020).
- Moley Robotics. MK1—The World’s First Robotic Kitchen. 2015. Available online: http://www.moley.com/ (accessed on 10 December 2020).
- DigitalFoodLab. NYMBLE LABS—The Smart Kitchen Appliance. 2010. Available online: https://www.digitalfoodlab.com/en/foodtech-database/nymble-labs (accessed on 10 December 2020).
- Elinas, P.; Hoey, J.; Lahey, D.; Montgomery, J.; Murray, D.; Se, S.; Little, J. Waiting with Jose, a vision-based mobile robot. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 4, pp. 3698–3705. [Google Scholar] [CrossRef]
- Maxwell, B.A.; Meeden, L.A.; Addo, N.; Brown, L.; Dickson, P.; Ng, J.; Olshfski, S.; Silk, E.; Wales, J. Alfred: The Robot Waiter Who Remembers You. In Proceedings of AAAI Workshop on Robotics; AAAI Press: Orlando, FL, USA, 1999; pp. 1–12. Available online: https://www.aaai.org/Papers/Workshops/1999/WS-99-15/WS99-15-001.pdf (accessed on 10 December 2020).
- Chen, C.; Gao, Q.; Song, Z.; Liping, O.; Wu, X. Catering service robot. In Proceedings of the IEEE World Congress on Intelligent Control and Automation (WCICA), Jinan, China, 7–9 July 2010; pp. 599–604. [Google Scholar] [CrossRef]
- LaValle, S.M. Planning Algorithms, 1st ed.; Cambridge University Press: Cambridge, UK, 2006; pp. 1–826. [Google Scholar] [CrossRef]
- Sian, N.E.; Sakaguchi, T.; Yokoi, K.; Kawai, Y.; Maruyama, K. Operating humanoid robots in human environments. In Proceedings of the Workshop on Manipulation for Human Environments, Robotics: Science and Systems, Dalian, China, 21–23 June 2006. [Google Scholar]
- Kemp, C.C.; Edsinger, A.; Torres-Jara, E. Challenges for robot manipulation in human environments [Grand challenges of robotics]. IEEE Robot. Autom. Mag. 2007, 14, 20–29. [Google Scholar] [CrossRef]
- Tzou, J.H.; Su, K.L. The development of the restaurant service mobile robot with a laser positioning system. In Proceedings of the 2008 27th Chinese Control Conference, Kunming, China, 16–18 July 2008; Volume 14, pp. 252–256. [Google Scholar] [CrossRef]
- Tan, T.H.; Chang, C.S.; Chen, Y.F. Developing an intelligent e-restaurant with a menu recommender for customer-centric service. IEEE Trans. Syst. Man Cybern. Part C Appl. Rev. 2012, 42, 775–787. [Google Scholar] [CrossRef]
- Asif, M.; Sabeel, M.; Mujeeb-ur Rahman, K. Waiter robot-solution to restaurant automation. In Proceedings of the 1st Student Multi Disciplinary Research Conference (MDSRC), Wah, Pakistan, 14–15 November 2015; pp. 14–15. [Google Scholar]
- Acosta, L.; González, E.; Rodríguez, J.; Hamilton, A.; Méndez, J.; Hernéndez, S.; Sigut, M.; Marichal, G. Design and Implementation of a Service Robot for a Restaurant. Int. J. Robot. Autom. 2006, 21, 273–281. [Google Scholar] [CrossRef]
- Gurav, S.; Khot, P.; Potadar, D.; Shelke, S.; Chougula, P.B. Remote controlled Waiter Robot for Restaurant Automation. Int. J. Appl. Innov. Eng. Manag. (IJAIEM) 2017, 6, 156–160. [Google Scholar]
- Hart, S.; Ou, S.; Sweeney, J.; Grupen, R. A Framework for Learning Declarative Structure; Technical Report; Department of Computer Science, University of Massachusetts: Amherst, MA, USA, 2006; Available online: https://apps.dtic.mil/sti/citations/ADA459921 (accessed on 10 December 2020).
- Deegan, P.; Thibodeau, B.J.; Grupen, R. Designing a Self-Stabilizing Robot for Dynamic Mobile Manipulation; Technical Report; Department of Computer Science, University of Massachusetts: Amherst, MA, USA, 2006; Available online: https://apps.dtic.mil/sti/citations/ADA459932 (accessed on 10 December 2020).
- Katz, D.; Horrell, E.; Yang, Y.; Burns, B. The umass mobile manipulator uman: An experimental platform for autonomous mobile manipulation. In Proceedings of the Workshop on Manipulation in Human Environments at Robotics: Science and Systems, 2006; Available online: https://people.cs.umass.edu/~elm/papers/UMan_workshop_06.pdf (accessed on 10 December 2020).
- Edsinger, A.; Kemp, C.C. Manipulation in human environments. In Proceedings of the 2006 6th IEEE-RAS International Conference on Humanoid Robots (HUMANOIDS), Genova, Italy, 4–6 December 2006; pp. 102–109. [Google Scholar] [CrossRef]
- Natale, L.; Torres-Jara, E. A sensitive approach to grasping. In Proceedings of the Sixth International Workshop on Epigenetic Robotics, Paris, France, 20–22 September 2006; pp. 87–94. [Google Scholar]
- Zinn, M.; Roth, B.; Khatib, O.; Salisbury, J.K. A new actuation approach for human friendly robot design. Int. J. Robot. Res. 2004, 23, 379–398. [Google Scholar] [CrossRef]
- Vermeulen, M.M.; Wisse, M. Maximum allowable manipulator mass based on cycle time, impact safety and pinching safety. Ind. Robot 2008, 35, 410–420. [Google Scholar] [CrossRef]
- Enotiades, H.; Makedon, F.; Phan, S.; McMurrough, C.; Shiakolas, P. Talos—Assistive Robotic Platform Harris. In Proceedings of the ACM 7th International Conference on PErvasive Technologies Related to Assistive Environments, Island of Rhodes, Greece, 27–30 May 2014; p. 69. [Google Scholar] [CrossRef]
- Albu-Schäffer, A.; Haddadin, S.; Ott, C.; Stemmer, A.; Wimböck, T.; Hirzinger, G. The DLR lightweight robot: Design and control concepts for robots in human environments. Ind. Robot. 2007, 34, 376–385. [Google Scholar] [CrossRef]
- Noor, M.Z.; Rahman, A.A.; Saaid, M.F.; Ali, M.S.; Zolkapli, M. The development of Self-Service Restaurant Ordering System (SROS). In Proceedings of the 2012 IEEE Control and System Graduate Research Colloquium (ICSGRC 2012), Shah Alam, Selangor, Malaysia, 16–17 July 2012; pp. 348–353. [Google Scholar] [CrossRef]
- Pieskä, S.; Luimula, M.; Jauhiainen, J.; Spiz, V. Social service robots in public and private environments. In Recent Researches in Circuits, Systems, Multimedia and Automatic Control; SWEAS: Rovaniemi, Finland, 2012; pp. 190–196. [Google Scholar]
- Pieskä, S.; Luimula, M.; Jauhiainen, J.; Spiz, V. Social Service Robots in Wellness and Restaurant Applications. J. Commun. Comput. 2016, 10, 116–123. [Google Scholar] [CrossRef]
- Jevtic, A.; Lucet, E.; Kozlov, A.; Gancet, J. INTRO: A multidisciplinary approach to intelligent Human-Robot Interaction. In Proceedings of the World Automation Congress (WAC), Puerto Vallarta, Mexico, 24–28 June 2012; pp. 1–6. [Google Scholar]
- Scheutz, M.; Schermerhorn, P.; Middendorff, C.; Kramer, J.; Anderson, D.; Dingler, A. Toward Affective Cognitive Robots for Human-Robot Interaction Affective Architectures for Complex Robots. In Proceedings of the AAAI 2005 Robot Workshop, Pittsburgh, PA, USA, 9–13 July 2005; pp. 61–66. [Google Scholar]
- Castillo, J.C.; Serrano-Cuerda, J.; Fernández-Caballero, A. Robust people segmentation by static infrared surveillance camera. In Proceedings of the International Conference on Industrial, Engineering and Other Applications of Applied Intelligent Systems, Córdoba, Spain, 1–4 June 2010; pp. 348–357. [Google Scholar] [CrossRef]
- Hernandez-Vicen, J.; Martinez, S.; Garcia-Haro, J.M.; Balaguer, C. Correction of Visual Perception Based on Neuro-Fuzzy Learning for the Humanoid Robot TEO. Sensors 2018, 18, 972. [Google Scholar] [CrossRef] [PubMed]
- Bodiroža, S.; Stern, H.I.; Edan, Y. Dynamic gesture vocabulary design for intuitive human-robot dialog. In Proceedings of the seventh annual ACM/IEEE International Conference on Human-Robot Interaction (HRI ’12), Boston, MA, USA, 5–8 March 2012; p. 111. [Google Scholar] [CrossRef]
- Bodiroža, S.; Doisy, G.; Hafner, V.V. Position-invariant, real-time gesture recognition based on dynamic time warping. In Proceedings of the ACM/IEEE International Conference on Human-Robot Interaction, Tokyo, Japan, 3–6 March 2013; pp. 87–88. [Google Scholar] [CrossRef]
- Murthy, G.R.; Jadon, R.S. Hand gesture recognition using neural networks. In Proceedings of the 2010 IEEE 2nd International Advance Computing Conference (IACC 2010), Patiala, India, 19–20 February 2010; pp. 134–138. [Google Scholar] [CrossRef]
- Kahn, R.; Swain, M.; Prokopowicz, P.; Firby, R. Gesture recognition using the Perseus architecture. In Proceedings of the Computer Vision and Pattern Recognition (CVPR’96), San Francisco, CA, USA, 18–20 June 1996; pp. 734–741. [Google Scholar] [CrossRef]
- Eckes, C.; Biatov, K.; Hülsken, F.; Köhler, J.; Breuer, P.; Branco, P.; Encarnacao, L.M. Towards Sociable Virtual Humans: Multimodal Recognition of Human Input and Behavior. Int. J. 2007, 6, 21–30. [Google Scholar] [CrossRef]
- Russel, S.; Norvig, P. Artificial Intelligence—A Modern Approach, 3rd ed.; Pearson: Upper Saddle River, NJ, USA, 2012. [Google Scholar] [CrossRef]
- Kumar, V.; Efran, M.; Ostrowski, J.P. Motion Planning and Control of Robots. Handb. Ind. Robot. 2007, 295–315. [Google Scholar] [CrossRef]
- Martinez, S.; Garcia-Haro, J.M.; Victores, J.; Jardon, A.; Balaguer, C. Experimental Robot Model Adjustments Based on Force-Torque Sensor Information. Sensors 2018, 18, 836. [Google Scholar] [CrossRef]
- Yu, Q.-X.; Yuan, C.; Fu, Z.; Zhao, Y.-Z. Research of the localization of restaurant service robot. Int. J. Adv. Robot. Syst. 2010, 7, 227–238. [Google Scholar] [CrossRef]
- Hertzberg, J.; Zhang, J.; Zhang, L.; Rockel, S.; Neumann, B.; Lehmann, J.; Dubba, K.S.; Cohn, A.G.; Saffiotti, A.; Pecora, F.; et al. The RACE project. KI Künstliche Intell. 2014, 28, 297–304. [Google Scholar] [CrossRef]
- Garrido, S.; Moreno, L.; Blanco, D. Exploration of a cluttered environment using Voronoi Transform and Fast Marching. Robot. Auton. Syst. 2008, 56, 1069–1081. [Google Scholar] [CrossRef]
- Xu, Y.; Ohmoto, Y.; Ueda, K.; Komatsu, T.; Okadome, T.; Kamei, K.; Okada, S.; Sumi, Y.; Nishida, T. A platform system for developing a collaborative mutually adaptive agent. In Proceedings of the International Conference on Industrial, Engineering and Other Applications of Applied Intelligent Systems, Tainan, Taiwan, 24–27 June 2009; pp. 576–585. [Google Scholar] [CrossRef]
- Lehmann, J.; Neumann, B.; Bohlken, W.; Hotz, L. A Robot Waiter that Predicts Events by High-level Scene Interpretation. In Proceedings of the 6th International Conference on Agents and Artificial Intelligence, Angers, Loire Valley, France, 6–8 March 2014; pp. 469–476. [Google Scholar] [CrossRef]
- Neumann, B.; Hotz, L.; Rost, P.; Lehmann, J. A robot waiter learning from experiences. In International Workshop on Machine Learning and Data Mining in Pattern Recognition; Springer: St. Petersburg, Russia, 2014; Volume 8556 LNAI, pp. 285–299. [Google Scholar] [CrossRef]
- Gat, E. Integrating reaction and planning in a heterogeneous asynchronous architecture for mobile robot navigation. ACM SIGART Bull. 2007, 2, 70–74. [Google Scholar] [CrossRef]
- Ghallab, M.; Nau, D.; Traverso, P. Automated Planning: Theory and Practice; Morgan Kaufmann: San Francisco, CA, USA, 2004; pp. 1–635. [Google Scholar] [CrossRef]
- Sirin, E.; Parsia, B.; Grau, B.C.; Kalyanpur, A.; Katz, Y. Pellet: A practical OWL-DL reasoner. Web Semant. 2007, 5, 51–53. [Google Scholar] [CrossRef]
- Garcia-Haro, J.M.; Henze, B.; Mesesan, G.; Martinez, S.; Ott, C. Integration of Dual-Arm Manipulation in a Passivity Based Whole-Body Controller for Torque-Controlled Humanoid Robots. In Proceedings of the 2019 IEEE-RAS 19th International Conference on Humanoid Robots (Humanoids), Toronto, ON, Canada, 15–17 October 2019. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Type | Description |
|---|---|
| UAV | They are used from the air. Sometimes they are known as drones. UAVs look like model aeroplanes and vary in size from small planes to full-size planes. |
| UGV | They are robots that work in contact with the ground. Usually, UGVs are employed for jobs where it may be inconvenient, dangerous, or the presence of a human is impossible. |
| UUV | These marvels have capabilities to operate underwater. The UUVs were designed to contribute to the following mission areas: Mine Warfare, Intelligence, Surveillance, and Reconnaissance and Mapping undersea environmental. |
| Type | Description |
|---|---|
| Delivery/Nurse | These robots aim to carry meds, lab specimens, sterile supplies, linens, trash, medical waste, patient meals and even disinfect bacteria or viruses. |
| Rehabilitation | Rehabilitation robotics is based on assisting different sensorimotor functions, development of different schemes of assisting therapeutic training, or assessment of the sensorimotor performance of the patient. |
| Surgical | The purpose of this kind of robots is to give enhanced diagnostic capabilities, a less invasive and comfier experience for the patient, or the capability to perform more accurate interventions. |
| Type | Description |
|---|---|
| Indoor | This type of robot performs household cleaning tasks inside the house. Nowadays, it its possible to find numerous and different household tasks that have been automated and replaced by cleaner service robots. In fact, in the market, there are robots that sweep and scrub the floor, robots that clean the windows of difficult access or robots that clean the air. |
| Outdoor | This type of robot performs its tasks outside the house. On this side, it is possible to find other tasks that robots can also perform. For example, there are robots that cut the grass, robots that clean the pool or even robots that unblock pipes. |
| Type | Description |
|---|---|
| At hospital | The operation of a hospital or health centre comprises a complex system of tasks. These tasks are not only limited to medical care but also require a combination of logistics, administration and organisation tasks. |
| At home | The demand for home care services and facilities is growing. The ambient intelligent systems provide their service in a sensitive and receptive manner and are discrete in our environment. Supervision systems are used to monitor users or patients in their homes related to the healthcare process. |
| Type | Description |
|---|---|
| Prostheses | Prostheses are defined as external devices that partial or totally replace a limb. This definition includes any device placed within the body for structural or functional purposes. |
| Orthoses | Orthoses are an external device that is used to modify the structural and functional characteristics of the neuromuscular and skeletal system. It does not replace a member or organ but replaces or reinforces its functionality. |
| Rehabilitation Aids | This Rehabilitation Aid systems or treatments (therapies) help to recover motor functionality through training. This training is based on physical or cognitive exercises, and the therapy is adapted to the patient. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Garcia-Haro, J.M.; Oña, E.D.; Hernandez-Vicen, J.; Martinez, S.; Balaguer, C. Service Robots in Catering Applications: A Review and Future Challenges. Electronics 2021, 10, 47. https://doi.org/10.3390/electronics10010047
Garcia-Haro JM, Oña ED, Hernandez-Vicen J, Martinez S, Balaguer C. Service Robots in Catering Applications: A Review and Future Challenges. Electronics. 2021; 10(1):47. https://doi.org/10.3390/electronics10010047
Chicago/Turabian StyleGarcia-Haro, Juan Miguel, Edwin Daniel Oña, Juan Hernandez-Vicen, Santiago Martinez, and Carlos Balaguer. 2021. "Service Robots in Catering Applications: A Review and Future Challenges" Electronics 10, no. 1: 47. https://doi.org/10.3390/electronics10010047
APA StyleGarcia-Haro, J. M., Oña, E. D., Hernandez-Vicen, J., Martinez, S., & Balaguer, C. (2021). Service Robots in Catering Applications: A Review and Future Challenges. Electronics, 10(1), 47. https://doi.org/10.3390/electronics10010047