Abstract
This paper addresses the problem of ice-relative underwater robotic vehicle navigation relative to moving or stationary contiguous sea ice. A review of previously-reported under-ice navigation methods is given, as well as motivation for the use of under-ice robotic vehicles with precision navigation capabilities. We then describe our proposed approach, which employs two or more satellite navigation beacons atop the sea ice along with other precision vehicle and ship mounted navigation sensors to estimate vehicle, ice, and ship states by means of an Extended Kalman Filter. A performances sensitivity analysis for a simulated 7.7 km under ice survey is reported. The number and the location of ice deployed satellite beacons, rotational and translational ice velocity, and separation of ship-based acoustic range sensors are varied, and their effects on estimate error and uncertainty are examined. Results suggest that increasing the number and/or separation of ice-deployed satellite beacons reduces estimate uncertainty, whereas increasing separation of ship-based acoustic range sensors has little impact on estimate uncertainty. Decreasing ice velocity is also correlated with reduced estimate uncertainty. Our analysis suggests that the proposed method is feasible and can offer scientifically useful navigation accuracy over a range of operating conditions.
1. Introduction
This paper addresses the problem of precision ice-relative navigation of Uninhabited Underwater Vehicles (UUVs) in the upper water-column under moving sea ice floe in the polar ice-pack—a Global Positioning System (GPS)-denied undersea environment in which conventional downward-looking bottom-lock Doppler sonar navigation is generally not possible due to excessive water depth below the vehicle.
This study seeks to evaluate quantitatively, in simulation, the performance of an underwater navigation system comprised of the following navigation sensors:
- Two or more Global Navigation Satellite System (GNSS)1 transceivers deployed on the moving ice floe to instrument ice position and orientation.
- A surface ship is equipped with a precision GNSS receiver, a true-North seeking gyrocompass, and two acoustic modems providing acoustic ranging and telemetry to the underwater vehicle(s). The advantage of two acoustic beacons is that it enables you to compute a complete position fix when the underwater vehicle is not moving relative to the ship.
- The UUVs are equipped with upward-looking Doppler sonars, precision pressure depth sensors, and true-North seeking gyro compasses.
This paper addresses the ice-relative navigation problem in a state estimation framework, where states are comprised of 28 linear and angular positions and velocities of the vehicle, ship, and ice. The paper reports a novel performance analysis of an approach to ice-relative navigation originally reported in [1]. The principal goal of this study is the sensitivity analysis to evaluate quantitatively the effects on navigation precision of the following operational parameters:
- The effect of variation in separation of ice-top GNSS beacons.
- The effect of variation in number of ice-top GNSS beacons—i.e., more than two GNSS beacons.
- The effects of variation in ice velocity (rotational and translational).
- The effects of variation in separation of ship-deployed acoustic ranging modems.
The effects of these variations on the estimates’ error and covariance are examined, with special attention given to navigation accuracy at the end of the simulated mission, when ship-to-vehicle distance is highest.
The remainder of the paper is organized as follows: Section 2 provides a brief outline of previously reported under-ice navigation methods and motivates the need for precision under-ice navigation, Section 3 details our state definition, process and observation models, Section 4 describes the simulation environment, and summarizes parameters under examination. Section 5 presents the results of the simulation studies. Finally, Section 6 concludes and summarizes.
4. Comparative Numerical Simulation Performance Analysis: Ice-Relative Navigation
We employed the Gazebo simulation environment [43] to generate simulated instrument measurements and ground truth data against which the EKF’s performance was evaluated. The simulation consisted of a 2.1 km × 2.1 km × 2 m contiguous ice floe, ship, and UUV performing a rectangular survey relative to the ice floe. Survey lines were 1 km long, with 100 m spacing. The UUV model, trajectory controller, and pressure sensor plug-in were provided by UUV Simulator [44], existing Gazebo plug-ins were used to generate gyrocompass and GNSS measurements, and custom Gazebo plug-ins were written to simulate DVL and OWTT range measurements.
In these simulations, the simulated underwater vehicle was commanded to follow a 1 km × 0.7 km ice-relative rectangular survey, with 100 m leg spacing at a depth of 10 m with a commanded ice-relative velocity of 1 m/s.
We assume that the ship’s telemetry downlink to the submerged vehicle (via acoustic communications or via a lightweight fiber optic tether) contains regular reports of the estimated state (position, angular position, and associated velocities) of the ice and the ship. With this information, the vehicle can use its on-board sensors of the upward-looking DVL together with its AHRS and depth-sensor to estimate its absolute position and velocity relative to the geode as well as its position and velocity relative to the ice floe, thus enabling the vehicle to perform closed-loop control of the vehicle trajectory as desired to accomplish mission goals. With the proposed navigation system it is possible for the vehicle to execute closed-loop control relative to any desired frame of reference, including the ice-frame, geodetic world frame, or other frames as required to achieve mission objectives. Because the vehicle is expected to operate in closed-loop control, under-ice water currents relative to the ice flow will not perturb the vehicle trajectories.
4.1. Sensor Observation Noise
Zero-mean Gaussian measurement (observation) noise was assumed for each instrument, with noise and update rates listed in Table 1. While a published range accuracy for the Woods Hole Oceanographic Institution (WHOI) Micromodem is unavailable, the modem measures one-way travel-times with a measurement resolution of 125 microseconds (0.1875 m assuming a sound velocity of 1500 m/s), and reports measurements with a decimal resolution of 100 microseconds [45], thus the primary source of acoustic range estimation error is uncertainty or variation of sound velocity in the water column, and, in some cases, the effect of the acoustic path between source and receiver. Based upon our experience in moderate-range OWTT navigation, we simulated OWTT range-measurement noise to be zero mean with a standard deviation of 0.2% of actual slant-range between transmitter and receiver. The data sheet for the RDI Workhorse Navigator series [7] specifies them to have excellent long-term accuracy (bias) within +/−2 mm/s for the 300 kHz units, and +/−1 mm/s for the 600 kHz and 1200 kHz units when at low velocities, thus we consider the bias terms to be negligible. The IXSEA Phins true-North-seeking Fiber-optic Gyroscope (FOG) and Inertial Measurement Unit (IMU) has internal compensation for accelerometer and angular rate sensor biases [46].

Table 1.
Simulated sensor update rates and noise statistics.
Table 1.
Simulated sensor update rates and noise statistics.
| Instrument | Model | Measurement | Update Rate | |
|---|---|---|---|---|
| Gyro-compass | IXSEA | Heading | 0.1 | 10 Hz |
| PHINS [46] | Pitch, Roll | 0.01 | ||
| DVL | Teledyne RDI | Velocity | 3 mm/s | 2 Hz |
| 300 kHz [7] | Range | 1% Range | ||
| Pressure | Paroscientific | Pressure | 0.01% | 2 Hz |
| Sensor | Digiquartz [47] | |||
| Ice GNSS | Garmin 18x LVC [35] | Position | 3 m | 1 Hz |
| Ship GNSS | Trimble SPS852 [36] | Position | 0.3 m | 1 Hz |
| Range | WHOI | UUV-Ship | 0.2% Slant | 1/60 Hz |
| Sensor | Micromodem | Range | Range |
Note: Garmin 18x position accuracy value computed from 95% CEP values
4.2. Process Noise
As is usual for kinematic vehicle plant models (e.g., [33,34,39]), we assumed zero-mean Gaussian process noise Process noise values were tuned empirically to minimize ice-relative vehicle error, with chosen process noise values shown in Table 2.
Table 2.
Kinematic process model noise statistics.
Most of the oceanographic underwater vehicles, including Nereid Under-Ice (NUI) hybrid underwater vehicle [21], are designed to have low drag in the surge direction (for forward motion), and low drag in the heave direction (for vertical descent and ascent), and have a relatively high drag in the sway direction. These process noise statistics correspond to the relative mobility of such a vehicle based upon its directional drag differences.
4.3. Simulated Mission
A 1 km × 0.7 km ice-relative rectangular survey, with 100 m leg spacing was simulated with the UUV at a depth of 10 m, with a commanded ice-relative velocity of 1 m/s. The UUV trajectory controller utilized ground-truth ice-relative position and velocity information. An ice-relative survey path is useful, for example, for conducting oceanographic surveys of sea ice physical properties over a large area, such as that reported in [32] and making upward-looking multibeam maps of the complex underwater topography of multi-year sea ice [22].
The ship was modeled as being rigidly attached to the ice floe on its port side. Based upon the Authors’ experience, this is the most common configuration employed by icebreakers when rafting to a large ice floe because it allows the ship to maintain stable contact with the floe while simultaneously clearing a small opening in the ice on the starboard side, adjacent to the ship’s oceanographic winches and cranes, to launch and recover vehicles and instruments.
4.4. Sensitivity Analysis
To evaluate the state estimator’s performance and sensitivity to several controllable instrumentation decisions, we examined the individual effects of the following parameters: variation in spacing of ice-deployed GNSS beacons, variation in the number of ice-deployed GNSS beacons, variation in spacing between ship-deployed OWTT range transducers, and variation in translational and rotational ice velocity on the accuracy of the proposed method. While ice velocities are an uncontrollable environmental factor, they nevertheless present an additional parameter that is likely to vary under realistic operating conditions. The two metrics used to investigate performance of the EKF under the simulated parameters were average ice-relative Root Mean Square (RMS) vehicle position error, and average RMS ice-relative vehicle x-y position uncertainty, as estimated by the EKF. These values were averaged over the entirety of the simulated missions.
4.4.1. GNSS Configuration
To examine the effect spacing and the number of GNSS beacons on the estimator, the simulated ice floe was instrumented with 30 distinct configurations of ice-mounted GNSS beacons. In each configuration the first beacon, GNSS, marks the origin of the ice frame and was aligned with the stern of the ship, and 5 m off the port side. The position of the remaining GNSS units are depicted in Figure 1 with edge spacing varying from 100–1000 m. These experiments correspond to exp1, exp2, and exp3 in Table 3.
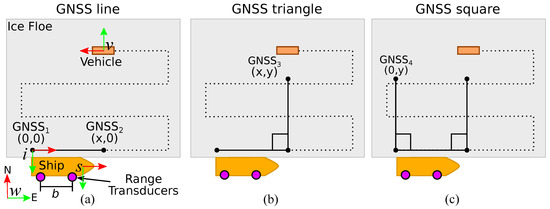
Figure 1.
The world, ice, ship, and vehicle coordinate frames are shown in (a). Global navigation satellite system (GNSS) beacons are simulated in line, triangle, and square configurations as seen in (a–c), with separation varying 100–1000 m. Experiments 1–3 correspond to GNSS configurations in (a–c) with varying spacing, under constant ice velocity and One Way Travel Time (OWTT) transducer spacing. Experiment 4 assumes a GNSS line configuration, fixed OWTT spacing, and varying linear and angular ice velocities. Experiment 4 assumes a GNSS line configuration, fixed ice velocity, and varying OWTT spacing. Simulation parameters are summarized in Table 3.
Table 3.
Parameters under variation in the sensitivity analysis included number (and spacing) of ice-deployed GNSS units, ice velocity, and OWTT transducer spacing.
4.4.2. Ice Velocity
Our experience is that floe velocities are highly variable depending on ice conditions, wind, and currents, but that it is common to observe ice translational velocities in the 0–0.5 m/s range and rotational velocities of 0–4 deg/h [21]. A total of five linear and angular ice floe velocities are simulated, in separate simulation runs. These experiments correspond to exp4 in Table 3.
4.4.3. One Way Travel Time (OWTT) Baseline
To examine the effect of OWTT transducer spacing, the simulated baseline was varied from 20–100 m. Previous deployments in the Arctic reported using a baseline of approximately 40 m [21]. On some icebreakers, the deck layout makes it difficult to deploy modem transducers on a baseline that is more than a fraction of the actual ship length. The range of acoustic baselines chosen for the simulations was selected to fully cover the range of baselines we have experienced in actual Arctic deployments.
Simulated range measurements were taken on an alternating 120 s cycle, with the stern modem transducer making measurements at the top of the cycle and the bow modem transducer making measurements 60 s later. These experiments correspond to exp5 in Table 3.
Because of the size of the parameter space under exploration, we limit our examination to a one-parameter variation at a time. We assume a nominal configuration of two ice-based GNSS units, spaced 500 m apart, 40 m spacing between ship-based OWTT transducers, and a constant linear and angular ice velocity of 0.25 m/s and 2 deg/h. A summary of the parameters under examination during each set of experiments is provided in Table 3.
5. Results: Ice-Relative Navigation
Five distinct simulations were conducted, corresponding to the five sets of linear and angular ice velocities outlined in Table 3. Simulated measurements from all 30 ice GNSS beacon configurations, 6 OWTT transducers, and the vehicle and ship sensors outlined in Table 1 were saved for post-processing. Measurements from the selected GNSS and OWTT units, were then used in conjunction with the process and observation models outlined in Section 3 to estimate the state of the system using the EKF according to Table 3. Process noise values used in the analysis are detailed in Table 2, and were tuned based on empirical assessment of vehicle position estimates. Position covariances were initialized as follows: UUV : 10 m, ship : 1 m, and ice covariance of 2 m2. Initial position states were initialized to their true values, and velocities and accelerations were initialized at zero. Due to the limitations of the simulation environment, data could not be generated faster than real-time, and thus it was not feasible to conduct a Monte Carlo-style experiment of repeated simulation runs.
Figure 2a shows the true (black) and estimated (red) vehicle tracklines in the world frame, with 1 vehicle covariance ellipsoids (blue) estimated from exp1 using 500 m GNSS spacing. Given the estimated vehicle and ice poses in the world frame, we can project the vehicle’s estimated position and orientation into the ice frame,
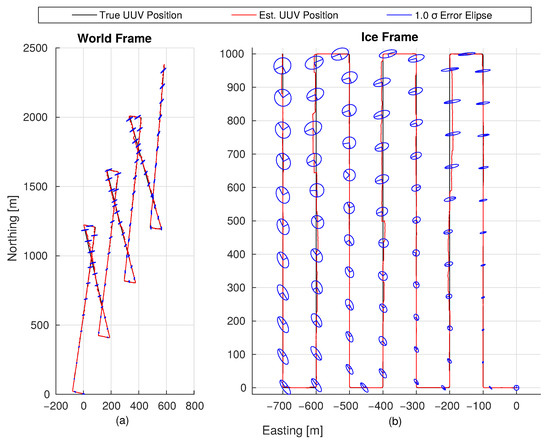
Figure 2.
True (black) and estimated (red) vehicle tracklines are shown for exp1, with 500 m GNSS spacing, in the world (a) and ice (b) frames, with 1 vehicle covariance ellipsoids shown in blue. The simulated uninhabited underwater vehicles (UUV) navigated an ice-relative serpentine pattern, while the simulated ice floe traveled at a constant velocity of 0.25 m/s (approximately 0.5 knots) northeast, with constant angular velocity of 2/h anticlockwise (viewed from above). While not shown, the ship remained fixed to the ice floe, and thus tracked Northeast. The highly eccentric error ellipsoids in the world frame are due to the poor ranging geometry that exists at large vehicle-ship standoff distances.
Using the method outlined in [48] we can then propagate the vehicle and ice linear and angular position covariance by means of first order approximation into the ice frame,
where is the Jacobian matrix corresponding to the transformation, and are the 6-DOF position and orientation covariance matrices of the ice and UUV, and is the off-diagonal portion of the state covariance matrix corresponding to the covariance between the 6-DOF ice and vehicle poses. Figure 2b shows the estimated and actual ice-relative trajectory, with first-order propagated covariance ellipsoids.
5.1. The Effects of Variation in GNSS Configuration
Estimator sensitivity to GNSS receiver placement on the ice is of natural interest because it is a variable which, given reasonable ice and weather conditions, is configurable by a deployment team prior to vehicle deployment. In addition to GNSS receiver spacing, estimator sensitivity to the number of deployed GNSS units is intuitively of interest as a means to provide additional independent observations of ice state.
Figure 3 shows the average estimated ice-relative vehicle RMS position error for the 7.7 km simulated mission. For each GNSS configuration (line, triangle, square, corresponding to exp1, exp2, exp3 respectively), we note that increased sensor separation is correlated with decreased ice-relative vehicle RMS position error.
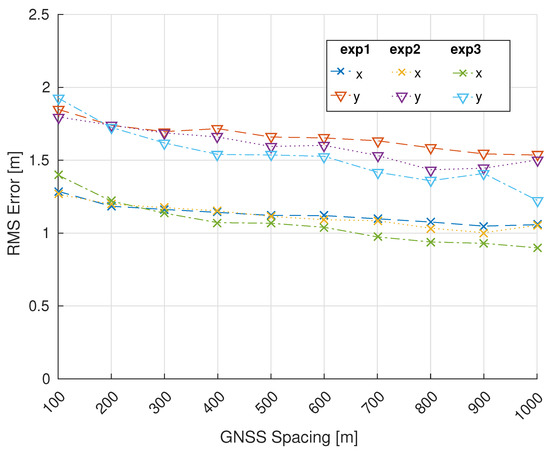
Figure 3.
Ice-relative vehicle position RMS error averaged over the 7.7 km simulated mission, plotted as a function of GNSS spacing for exp1, exp2, and exp3. Increasing separation between GNSS units is correlated with decreasing ice-relative vehicle position error.
Figure 4 shows ice-relative vehicle position uncertainty, computed using (30), averaged over the 7.7 km simulated mission for exp1, exp2, and exp3. Estimator uncertainty is shown component-wise in the ice frame, where the x and y components correspond to along-track and cross-track uncertainty respectively along the 1 km survey lines. The trend is similar to that of Figure 3 wherein increasing number and baseline of GNSS units is correlated with decreasing position uncertainty. Of note is that the reduction in estimated ice-relative vehicle position uncertainty by means of additional GNSS units is most pronounced at smaller spacing.
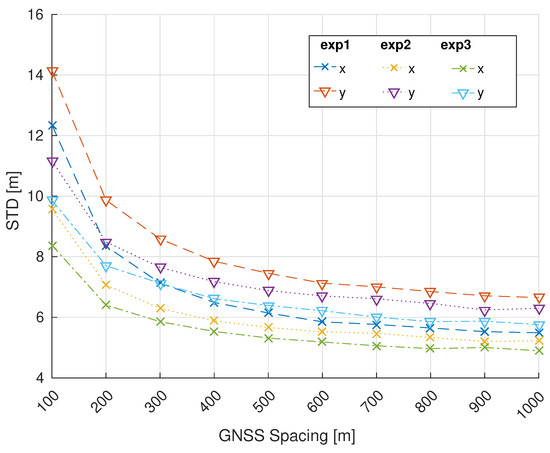
Figure 4.
Ice-relative vehicle position uncertainty averaged over the 7.7 km simulated mission, plotted as a function of GNSS spacing for exp1, exp2, and exp3. Increasing the number and separation of GNSS units is positively correlated with decreased ice-relative position uncertainty.
5.2. The Effects of Variation in Ice Velocity
For the purpose of examining ice-velocity on estimator performance, the ice-deployed GNSS configuration and OWTT transducer spacing were held constant at 500 m (line orientation), and 40 m respectively. Figure 5 shows the ice-relative vehicle position RMS error, averaged over each simulated mission. Position RMS error appears to increase slightly with increasing ice velocity, with the exception of the 0.25 m/s, 2/h case which shows slightly reduced RMS error. Such an outlier could be stochastic in nature, or could be due to the fact that the filter’s process noise was tuned empirically using the using results from the 0.25 m/s, /h case with 500 m GNSS spacing, and 40 m OWTT beacon spacing.
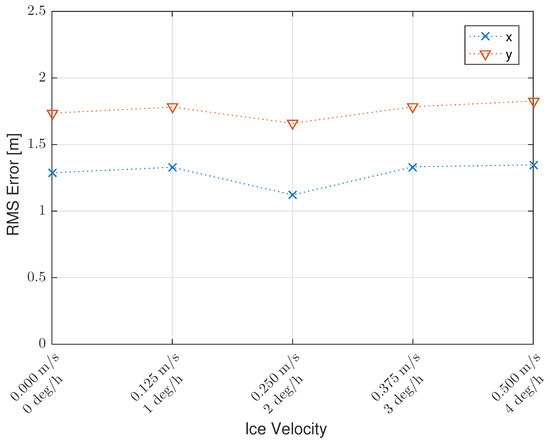
Figure 5.
Ice-relative vehicle position RMS error averaged over each simulated mission, shown as a function of simulated ice floe velocity. A 500 m GNSS line configuration and 40 m OWTT beacon spacing are assumed. The the 0.25 m/s, /h simulation is an outlier to the otherwise slightly increasing.
Figure 6 shows ice-relative vehicle position uncertainty averaged over each simulated mission. While increasing linear and angular ice velocity had little effect on RMS error, estimator uncertainty appears to grow monotonically with increased speed.
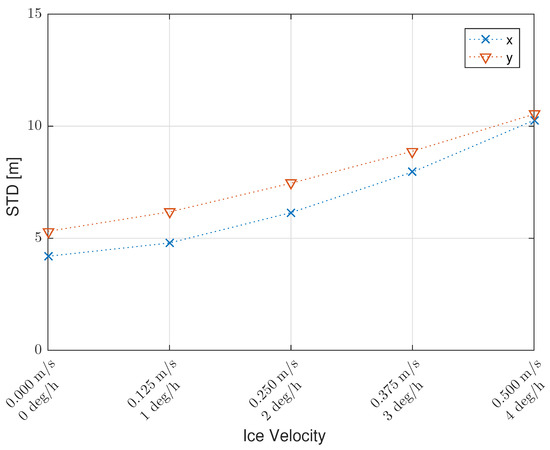
Figure 6.
Ice-relative vehicle position uncertainty averaged over each simulated mission, for five different linear and angular ice velocities. A 500 m GNSS line configuration and 40 m OWTT beacon spacing are used for each mission.
5.3. The Effects of Variation in OWTT Baseline
Spacing between ship-deployed OWTT transducers, the final parameter examined, is a variable that is typically easily adjustable prior to deployment of a vehicle. Increased transducer separation provides favorable geometry when ranging to a vehicle at smaller standoff distances, but this advantage decreases at large distances from the ship. For the final analysis, a 500 m GNSS line configuration and constant 0.25 m/s, 2 deg/h ice velocity were assumed while transducer spacing was varied from 20–100 m in 20 m increments.
Figure 7 shows average ice-relative vehicle position RMS over the range of simulated transducer spacing. Examining Figure 7, RMS error appears effectively insensitive to transducer spacing.
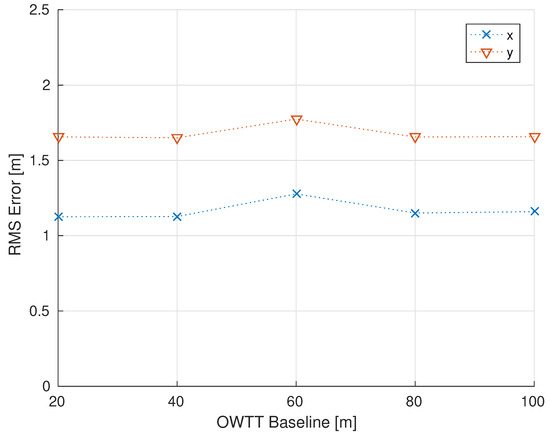
Figure 7.
Ice-relative vehicle position RMS error averaged over the 7.7 km ice relative vehicle trajectory for varying OWTT baselines. A 500 m GNSS line configuration and constant 0.25 m/s and 2 deg/h linear and angular ice velocity were simulated. Ice-relative vehicle position error appears effectively insensitive to transducer spacing. For reference, the end of mission vehicle-ship stand off distance was approximately 1220 m.
Figure 8 shows ice-relative vehicle position uncertainty averaged over the full vehicle trajectory for the five simulated transducer spacing. Similar to ice-relative position RMS error, the estimators uncertainty appears insensitive to transducer spacing when averaged over the full trajectory.
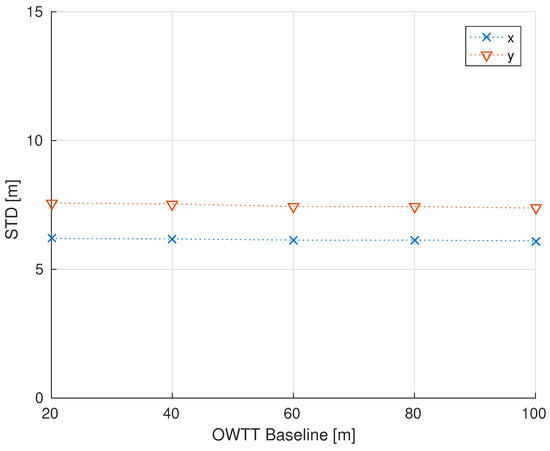
Figure 8.
Ice-relative vehicle position uncertainty averaged over the 7.7 km ice relative mission for varying OWTT baselines. A 500 m GNSS line configuration and constant 0.25 m/s and 2 deg/h linear and angular ice velocity were simulated. Similar to vehicle RMS position error, ice-relative vehicle position uncertainty appears insensitive to transducer spacing.
Figure 9 shows the magnitude of ice-relative position error averaged over the vehicle trajectory as a function of the number of GNSS receivers used (exp1–exp3). The general trend shows a correlation between the increased number of GNSS receivers, and reduced ice-relative position error, with the exception of the 100m case - possibly an artifact of the stochastic nature of the simulation.
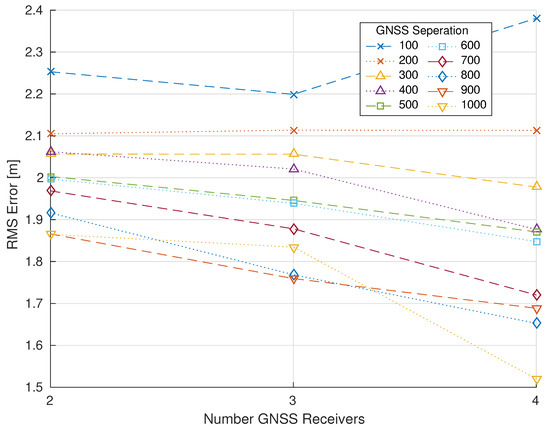
Figure 9.
Magnitude of ice-relative vehicle position error averaged over the 7.7 km ice relative mission as a function of number of GNSS receivers for each 10 GNSS baselines. Increasing the number of GNSS receivers on the ice generally results in reduced ice-relative vehicle position error.
6. Conclusions
This paper reports the results of a sensitivity analysis of an Extended Kalman Filter for use in navigation of underwater vehicles beneath moving sea ice using simulated sensor measurements. The effects on ice-relative vehicle navigation position RMS error and uncertainty are examined over a range of ice-deployed GNSS spacing and configurations, varying translational and rotational ice floe velocities, and ship-deployed OWTT transducer spacing. The data suggest that increasing the number and spacing of ice-deployed GNSS beacons reduces average RMS error and position uncertainty. While ice-relative vehicle position error appears relatively insensitive to increasing linear and angular ice velocity, position uncertainty (as estimated by the EKF) appears to increase monotonically with increased ice velocity. Lastly the simulations suggest that both ice-relative RMS error and uncertainty appear unaffected by varying ship-board OWTT transducer spacing (baseline) over the 20–100 m range.
These simulation results suggest that instrumenting ice floes with two or more GNSS receivers, along with other precision underwater navigation instrumentation can provide a scientifically useful means of navigation beneath moving sea ice over a range of operating conditions and vehicle-ship standoff distances.
Barring the opportunity to implement such a navigation system in the field, future studies could better model underwater acoustics, namely non-instantaneous time of flight, ray bending, and under-ice acoustical reflections.
Author Contributions
Conceptualization, L.D.L.B. and L.L.W.; writing—original draft preparation, L.D.L.B. and L.L.W.; writing—review and editing, L.D.L.B. and L.L.W.; All authors have read and agreed to the published version of the manuscript.
Funding
We gratefully acknowledge the support of the National Science Foundation under Awards IIS-1319667 and IIS-1909182 and, in part, support of the first author under a Graduate Fellowship from the Johns Hopkins Department of Mechanical Engineering. L.D.L. Barker was with the Department of Mechanical Engineering, Johns Hopkins University, Baltimore, MD 21218, USA, and is now with the Department of Marine Operations, Monterey Bay Aquarium Research Institute, Moss Landing, CA, 95039, USA.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Available upon request.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript, or in the decision to publish the results.
Abbreviations
The following abbreviations are used in this manuscript:
| AHRS | Attitude and Heading Reference System |
| AUV | Autonomous Underwater Vehicle |
| DVL | Doppler Velocity Log |
| EKF | Extended Kalman Filter |
| FOG | Fiber-optic Gyrocompass |
| GPS | Global Positioning System |
| GNSS | Global Navigation Satellite System |
| IMU | Inertial Measurement Unit |
| INS | Inertial Navigation System |
| LBL | Long Baseline |
| MOR | Mid-Ocean Ridge |
| NUI | Nereid Under-Ice |
| OWTT | One Way Travel Time |
| SLAM | Simultaneous Localization and Mapping |
| USBL | Ultra-Short Baseline |
| UUV | Uninhabited Underwater Vehicle |
| WHOI | Woods Hole Oceanographic Institution |
References
- Barker, L.D.L.; Whitcomb, L.L. A Preliminary Study of Ice-Relative Underwater Vehicle Navigation Beneath Moving Sea Ice. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, QLD, Australia; 2018; pp. 7484–7491. [Google Scholar] [CrossRef]
- Barker, L.D.L.; Jakuba, M.V.; Bowen, A.D.; German, C.R.; Maksym, T.; Mayer, L.; Boetius, A.; Dutrieux, P.; Whitcomb, L.L. Scientific challenges and present capabilities in underwater robotic vehicle design and navigation for oceanographic exploration under-ice. Remote Sens. 2020, 12, 2588. [Google Scholar] [CrossRef]
- Nicholls, K.W.; Abrahamsen, E.P.; Heywood, K.J.; Stansfield, K.; Østerhus, S. High-latitude oceanography using the Autosub autonomous underwater vehicle. Limnol. Oceanogr. 2008, 53, 2309–2320. [Google Scholar] [CrossRef]
- Jakuba, M.V.; Roman, C.N.; Singh, H.; Murphy, C.; Kunz, C.; Willis, C.; Sato, T.; Sohn, R.A. Long-baseline acoustic navigation for under-ice autonomous underwater vehicle operations. J. Field Robot. 2008, 25, 861–879. [Google Scholar] [CrossRef]
- Cazenave, F.; Zook, R.; Carroll, D.; Flagg, M.; Kim, S. The skinny on SCINI. J. Ocean Technol. 2011, 6, 39–58. [Google Scholar]
- Kukulya, A.; Plueddemann, A.; Austin, T.; Stokey, R.; Purcell, M.; Allen, B.; Littlefield, R.; Freitag, L.; Koski, P.; Gallimore, E.; et al. Under-ice operations with a REMUS-100 AUV in the Arctic. In Proceedings of the IEEE/OES Autonomous Underwater Vehicles (AUV), Monterey, CA, USA, 1–3 September 2010; pp. 1–8. [Google Scholar]
- Teledyne RD Instruments Inc. Workhorse Navigator Doppler Velocity Log Datasheet; Teledyne RD Instruments Inc.: San Diego, CA, USA, 2016. [Google Scholar]
- Brokloff, N. Matrix algorithm for Doppler sonar navigation. In Proceedings of the OCEANS’94, Brest, France; 1994; Volume 3, pp. III/378–III/383. [Google Scholar] [CrossRef]
- Kinsey, J.C.; Whitcomb, L.L. Preliminary Field Experience with the DVLNAV Integrated Navigation System for Oceanographic Submersibles. Control Eng. Pract. 2004, 12, 1541–1548. [Google Scholar] [CrossRef]
- McEwen, R.; Thomas, H.; Weber, D.; Psota, F. Performance of an AUV navigation system at Arctic latitudes. IEEE J. Ocean. Eng. 2005, 30, 443–454. [Google Scholar] [CrossRef]
- Kinsey, J.C.; Eustice, R.M.; Whitcomb, L.L. A survey of underwater vehicle navigation: Recent advances and new challenges. In Proceedings of the IFAC Conference on Manoeuvering and Control of Marine Craft, Lisbon, Portugal, 20–22 September 2006. [Google Scholar]
- Troni, G.; McFarland, C.J.; Nichols, K.A.; Whitcomb, L.L. Experimental evaluation of an inertial navigation system for underwater robotic vehicles. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation (ICRA), Shanghai, China, 9–13 May 2011; pp. 3064–3071. [Google Scholar] [CrossRef]
- Butler, B.; Verrall, R. Precision Hybrid Inertial/Acoustic Navigation System for a Long-Range Autonomous Underwater Vehicle. Navigation 2001, 48, 1–12. [Google Scholar] [CrossRef]
- Crees, T.; Kaminski, C.; Ferguson, J.; Laframboise, J.; Forrest, A.; Williams, J.; MacNeil, E.; Hopkin, D.; Pederson, R. UNCLOS under ice survey—An historic AUV deployment in the Canadian High Arctic. In Proceedings of the IEEE/MTS Oceans Conference and Exhibition, Seattle, WA, USA, 24–27 May 2010; pp. 1–8. [Google Scholar] [CrossRef]
- Kimball, P.; Rock, S. Sonar-based iceberg-relative navigation for autonomous underwater vehicles. Deep-Sea Res. Part II 2011, 58, 1301–1310. [Google Scholar] [CrossRef]
- Kimball, P.W.; Clark, E.B.; Scully, M.; Richmond, K.; Flesher, C.; Lindzey, L.E.; Harman, J.; Huffstutler, K.; Lawrence, J.; Lelievre, S.; et al. The ARTEMIS under-ice AUV docking system. J. Field Robot. 2018, 35, 299–308. [Google Scholar] [CrossRef]
- Sayre-McCord, R.T.; Murphy, C.; Kaeli, J.; Kunz, C.; Kimball, P.; Singh, H. Advances in Platforms and Algorithms for High Resolution Mapping in the Marine Environment. In Sensing and Control for Autonomous Vehicles: Applications to Land, Water and Air Vehicles; Fossen, T.I., Pettersen, K.Y., Nijmeijer, H., Eds.; Springer International Publishing: Cham, Switzerland, 2017; pp. 89–119. [Google Scholar] [CrossRef]
- Webster, S.; Freitag, L.; Lee, C.; Gobat, J. Towards real-time under-ice acoustic navigation at mesoscale ranges. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 537–544. [Google Scholar] [CrossRef]
- Webster, S.E.; Van Uffelen, L.J.; Shcherbina, A.; Aravkin, A.; Lee, C.M.; Worcester, P.F.; Dzieciuch, M. Incorporating real-time acoustic ranging and glider-based Doppler measurements to aid vehicle navigation. J. Acoust. Soc. Am. 2018, 144, 1805–1806. [Google Scholar] [CrossRef]
- Graupe, C.E.; van Uffelen, L.J.; Webster, S.E.; Worcester, P.F.; Dzieciuch, M.A. Preliminary results for glider localization in the Beaufort Duct using broadband acoustic sources at long range. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 16–19 September 2019; pp. 1–6. [Google Scholar] [CrossRef]
- McFarland, C.J.; Jakuba, M.V.; Suman, S.; Kinsey, J.C.; Whitcomb, L.L. Toward ice-relative navigation of underwater robotic vehicles under moving sea ice: Experimental evaluation in the Arctic Sea. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 1527–1534. [Google Scholar] [CrossRef]
- Williams, G.; Maksym, T.; Wilkinson, J.; Kunz, C.; Murphy, C.; Kimball, P.; Singh, H. Thick and deformed Antarctic sea ice mapped with autonomous underwater vehicles. Nat. Geosci. 2014, 8, 61–67. [Google Scholar] [CrossRef]
- Kutschale, H. Arctic Hydroacoustics. Arctic 1969, 22, 246–264. [Google Scholar] [CrossRef]
- Casalino, G.; Caiti, A.; Turetta, A.; Simetti, E. RT 2: Real-time ray-tracing for underwater range evaluation. Intell. Serv. Robot. 2011, 4, 259–270. [Google Scholar] [CrossRef]
- Weeks, W.F. On Sea Ice; University of Alaska Press: Fairbanks, AL, USA, 2010. [Google Scholar]
- Arrigo, K.R.; Perovich, D.K.; Pickart, R.S.; Brown, Z.W.; van Dijken, G.L.; Lowry, K.E.; Mills, M.M.; Palmer, M.A.; Balch, W.M.; Bahr, F.; et al. Massive Phytoplankton Blooms Under Arctic Sea Ice. Science 2012, 336, 1408. [Google Scholar] [CrossRef]
- Edmonds, H.; Michael, P.; Baker, E.; Connelly, D.; Snow, J.; Langmuir, C.; Dick, H.; Mühe, R.; German, C.; Graham, D. Discovery of abundant hydrothermal venting on the ultraslow-spreading Gakkel Ridge in the Arctic Ocean. Nature 2003, 421, 252–256. [Google Scholar] [CrossRef]
- Edwards, M.; Kurras, G.; Tolstoy, M.; Bohnenstiehl, D.; Coakley, B.; Cochran, J. Evidence of recent volcanic activity on the ultraslow-spreading Gakkel Ridge. Nature 2001, 409, 808–812. [Google Scholar] [CrossRef]
- Fisher, R.; Goodwillie, A. The Physiography of the Southwest Indian Ridge. Mar. Geophys. Res. 1997, 19, 451–455. [Google Scholar] [CrossRef]
- Grindlay, N.R.; Madsen, J.A.; Rommevaux-Jestin, C.; Sclater, J. A different pattern of ridge segmentation and mantle Bouguer gravity anomalies along the ultra-slow spreading Southwest Indian Ridge (15∘30’ E to 25∘ E). Earth Planet. Sci. Lett. 1998, 161, 243–253. [Google Scholar] [CrossRef]
- Barker, L.D.L.; Whitcomb, L.L. A preliminary survey of underwater robotic vehicle design and navigation for under-ice operations. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, South Korea, 9–14 October 2016; pp. 2028–2035. [Google Scholar] [CrossRef]
- Katlein, C.; Arndt, S.; Nicolaus, M.; Perovich, D.K.; Jakuba, M.V.; Suman, S.; Elliott, S.; Whitcomb, L.L.; McFarland, C.J.; Gerdes, R.; et al. Influence of ice thickness and surface properties on light transmission through Arctic sea ice. J. Geophys. Res. Ocean. 2015, 120, 5932–5944. [Google Scholar] [CrossRef]
- Webster, S.E.; Eustice, R.M.; Singh, H.; Whitcomb, L.L. Advances in single-beacon one-way-travel-time acoustic navigation for underwater vehicles. Int. J. Robot. Res. 2012, 31, 935–950. [Google Scholar] [CrossRef]
- Webster, S.E.; Walls, J.M.; Whitcomb, L.L.; Eustice, R.M. Decentralized extended information filter for single-beacon cooperative acoustic navigation: Theory and experiments. IEEE Trans. Robot. 2013, 29, 957–974. [Google Scholar] [CrossRef]
- Garmin International, Inc. GPS 18x Technical Specifications; Garmin International, Inc.: Schaffhausen, Switzerland, 2011. [Google Scholar]
- Trimble. Datasheet: Trimble SPS852 GNSS Modular Receiver; Trimble Navigation, Inc.: Sunnyvale, CA, USA, 2011. [Google Scholar]
- Schmidt, H.; Schneider, T. Acoustic communication and navigation in the new Arctic—A model case for environmental adaptation. In Proceedings of the 2016 IEEE Third Underwater Communications and Networking Conference (UComms), Lerici, Italy, 30 August–1 September 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Porter, M.B. The BELLHOP Manual and User’S Guide: Preliminary Draft; Tech. Rep. HLS-2010-1; Heat, Light, and Sound Research, Inc.: La Jolla, CA, USA, 2011; Available online: http://oalib.hlsresearch.com/AcousticsToolbox (accessed on 7 February 2021).
- Eustice, R.M.; Singh, H.; Leonard, J.J. Exactly sparse delayed-state filters for view-based SLAM. IEEE Trans. Robot. 2006, 22, 1100–1114. [Google Scholar] [CrossRef]
- Faires, J.D.; Burden, R.L. Numerical Methods; Brooks Cole: Pacific Grove, CA, USA, 2002. [Google Scholar]
- Kobilarov, M. EN530.603 Applied Optimal Control Lecture 10: Optimal State Estimation; Technical Report; Johns Hopkins University: Baltimore, MD, USA, 2015. [Google Scholar]
- Grewal, M.S.; Andrews, A.P.; Bartone, C.G. Global Navigation Satellite Systems, Inertial Navigation, and Integration; John Wiley & Sons: Hoboken, NJ, USA, 2013. [Google Scholar]
- Koenig, N.; Howard, A. Design and use paradigms for Gazebo, an open-source multi-robot simulator. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2004), Sendai, Japan, 28 September–2 October 2004; Volume 3, pp. 2149–2154. [Google Scholar]
- Manhães, M.M.M.; Scherer, S.; Voss, M.; Douat, L.R.; Rauschenbach, T. UUV Simulator: A Gazebo-based Package for Underwater Intervention and Multi-Robot Simulation. In Proceedings of the OCEANS’16 MTS/IEEE Monterey, Monterey, CA, USA, 19–23 September 2016; pp. 1–8. [Google Scholar]
- Grund, M. Synchronous Navigation with the Micro-Modem; Woods Hole Oceanographic Institution: Woods Hole, MA, USA, 2004. [Google Scholar]
- IXSEA PHINS User Guide; IXSEA: Saint-Germain-en-Laye, France, 2006.
- Paroscientific, Inc. Submersible Depth Sensors: Series 8000; Paroscientific, Inc.: Redmond, WA, USA, 2005. [Google Scholar]
- Su, S.F.; Lee, C.S.G. Manipulation and propagation of uncertainty and verification of applicability of actions in assembly tasks. IEEE Trans. Syst. Man Cybern. 1992, 22, 1376–1389. [Google Scholar] [CrossRef]
| 1. | The US GPS satellite navigation system is just one of four satellite navigation systems presently operational, including the Russian GLONASS, the European Union Galileo system, and the Chinese BeiDou system. Hereafter we will employ the generic term global navigation satellite system (GNSS) for these systems. |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).