

Research on the Resistance Reduction Law of Self-Excited a Resonant Circular Arc-Surface Bulldozing Plate Based on the Discrete Element Method


Abstract
:1. Introduction
2. Materials and Methods
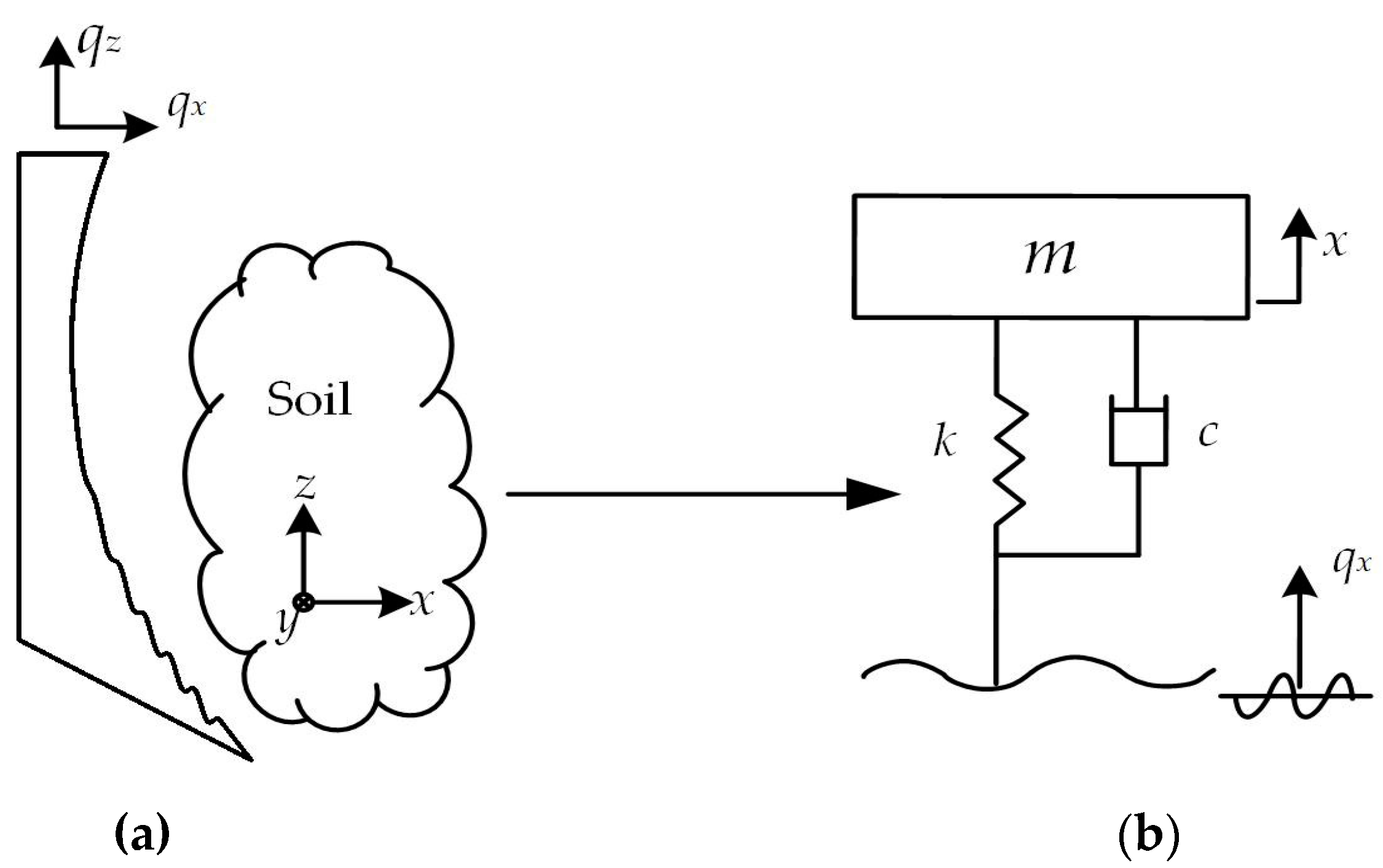
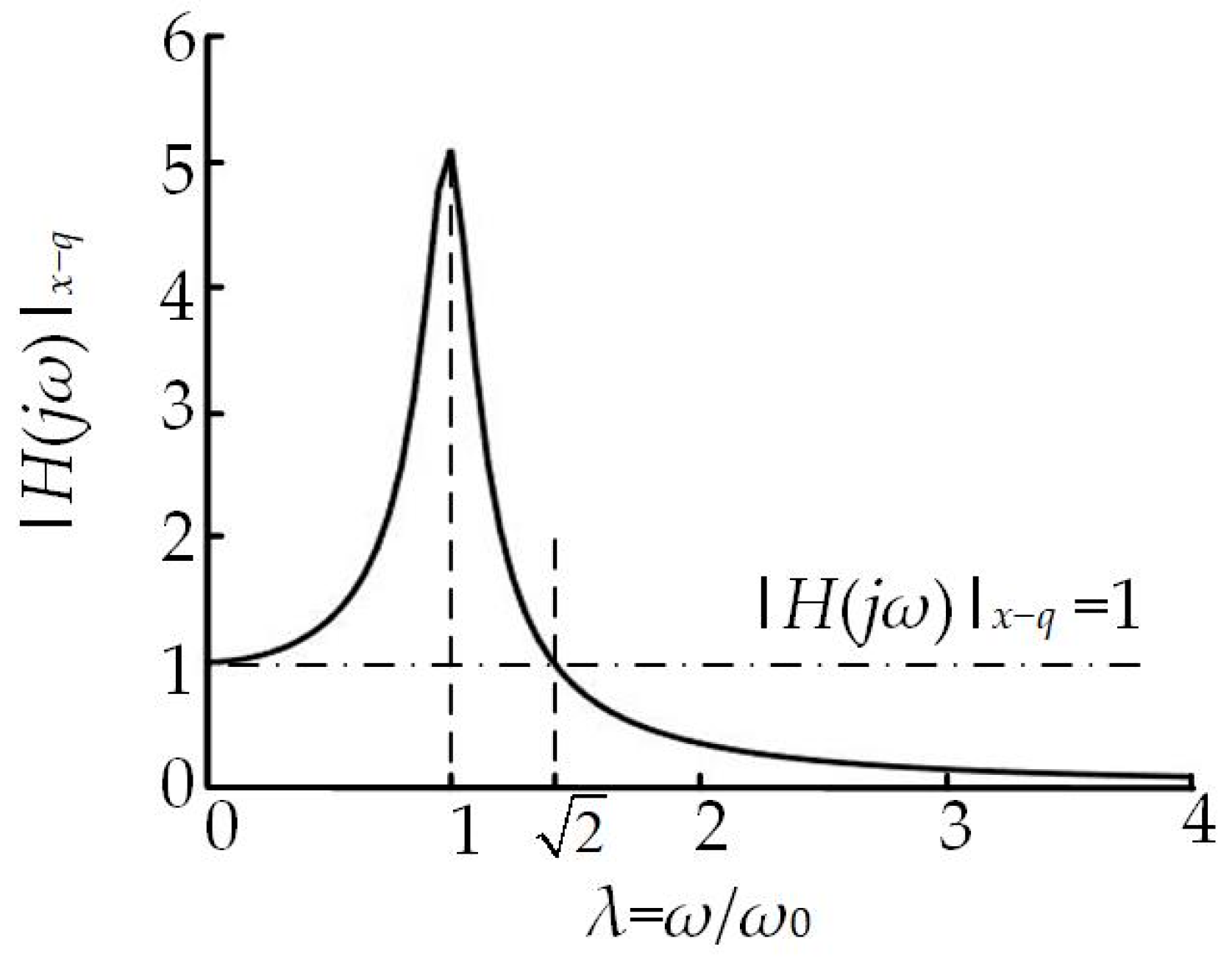
2.1. Vibration Cutting Model
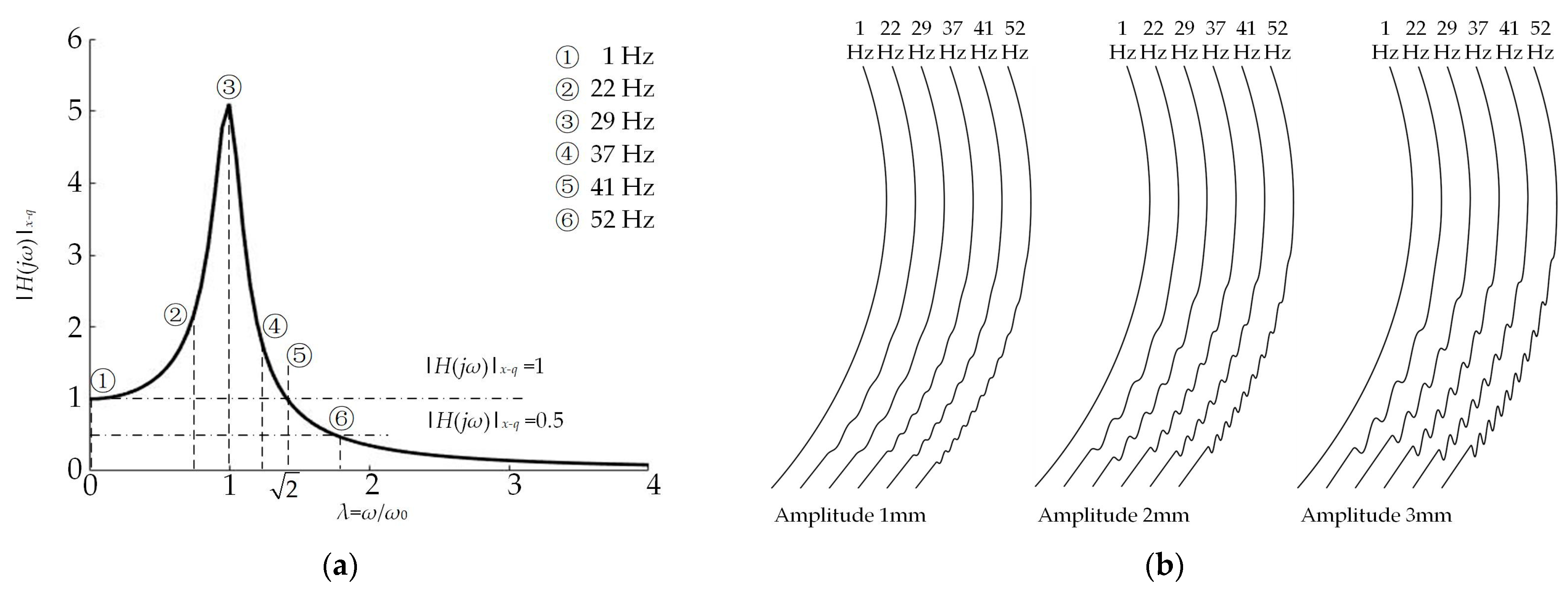
2.2. Soil Natural Frequency
2.3. Design and Manufacture of the Bulldozing Plate Model
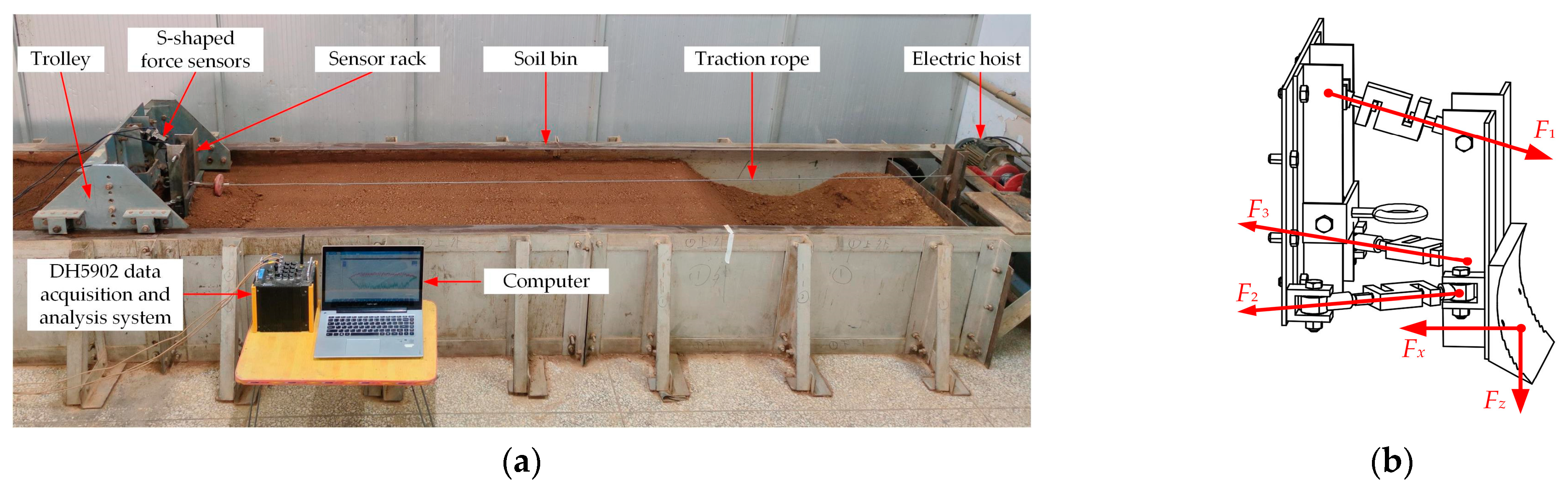
2.4. Soil Bin Test
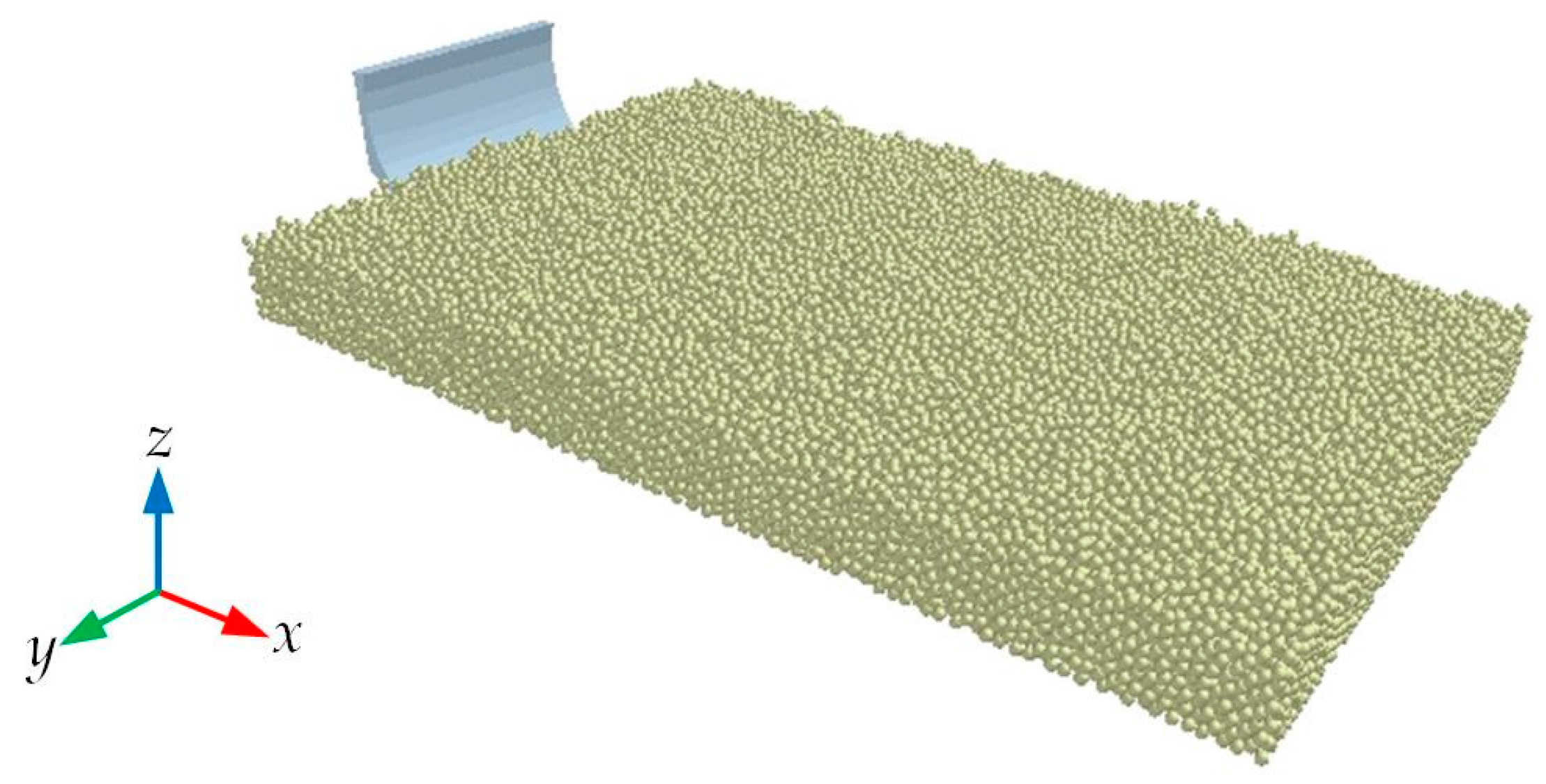
2.5. Discrete Element Simulation
3. Results and Discussion
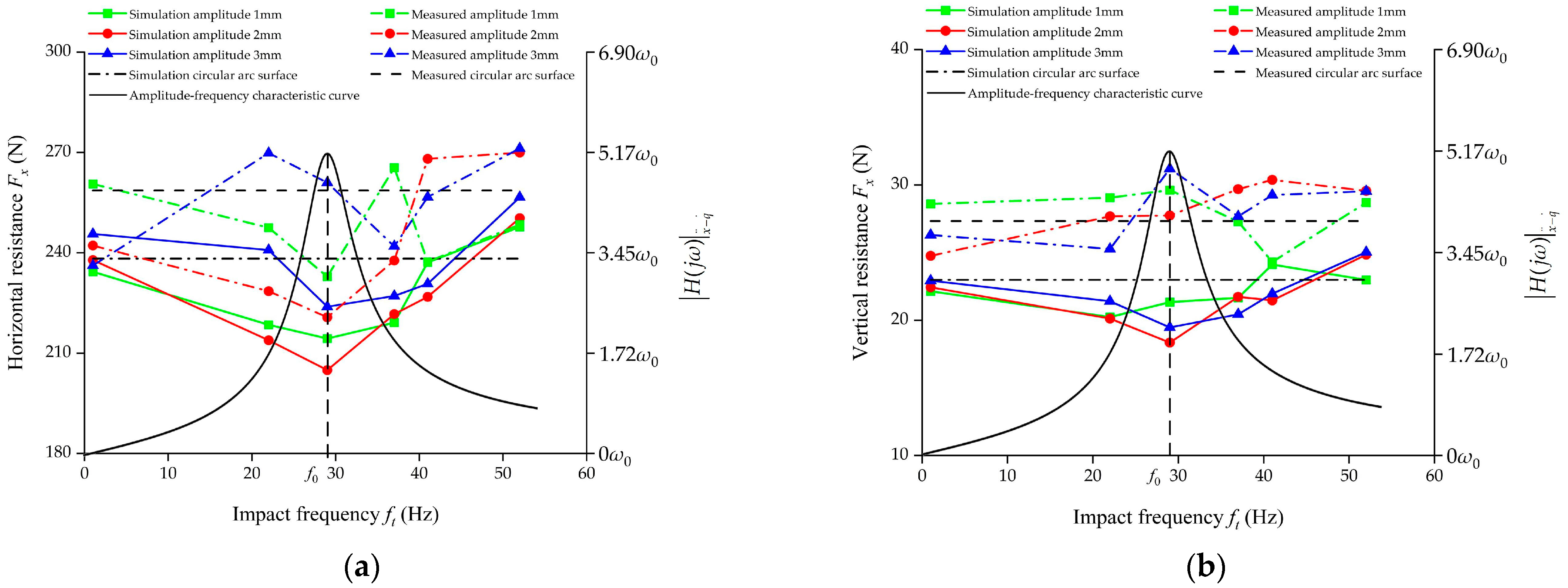
3.1. Comparative Analysis of the Working Resistance
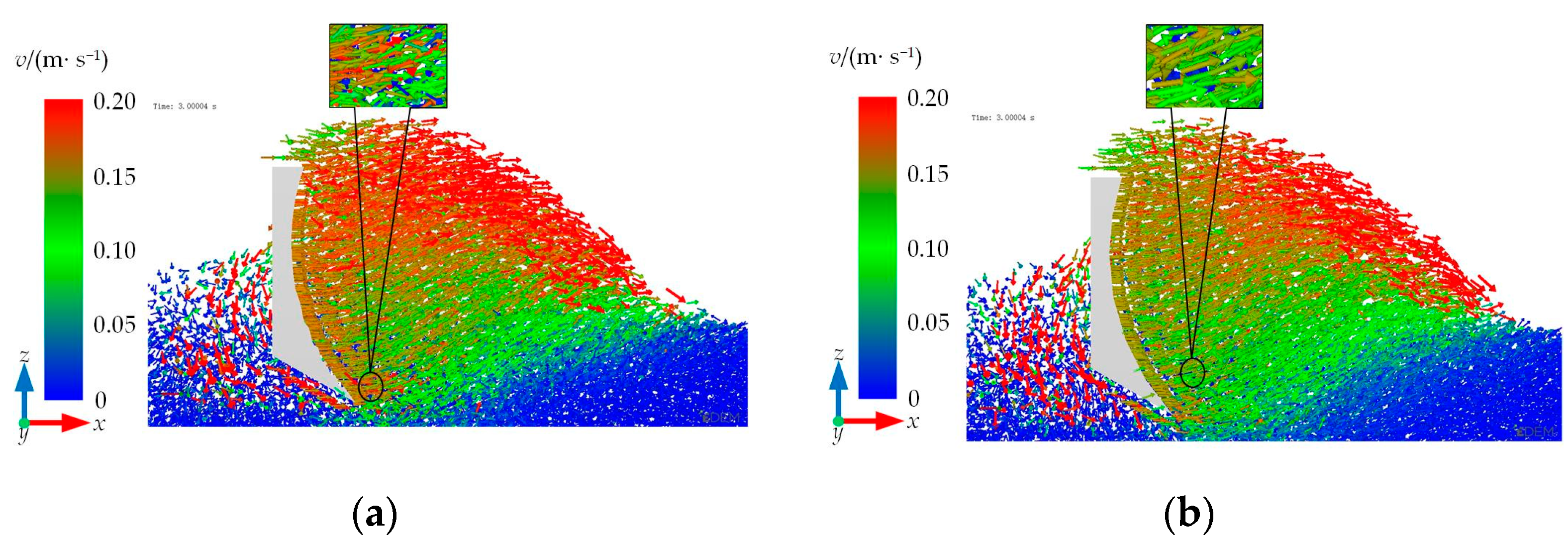
3.2. Microscopic Mechanism of Soil Disturbance
3.2.1. Microprocess Analysis of the Overall Soil Disturbance
3.2.2. Microprocess Analysis of the Local Soil Disturbance
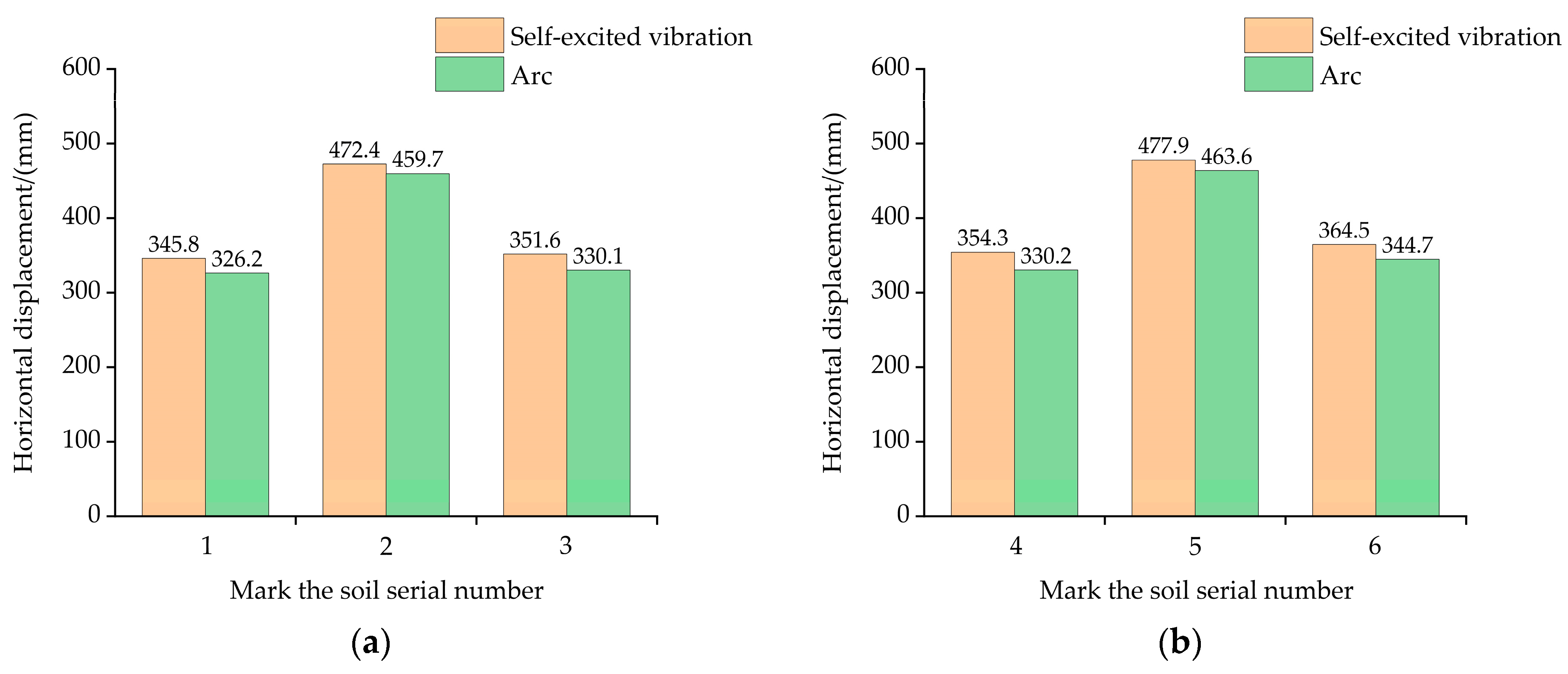
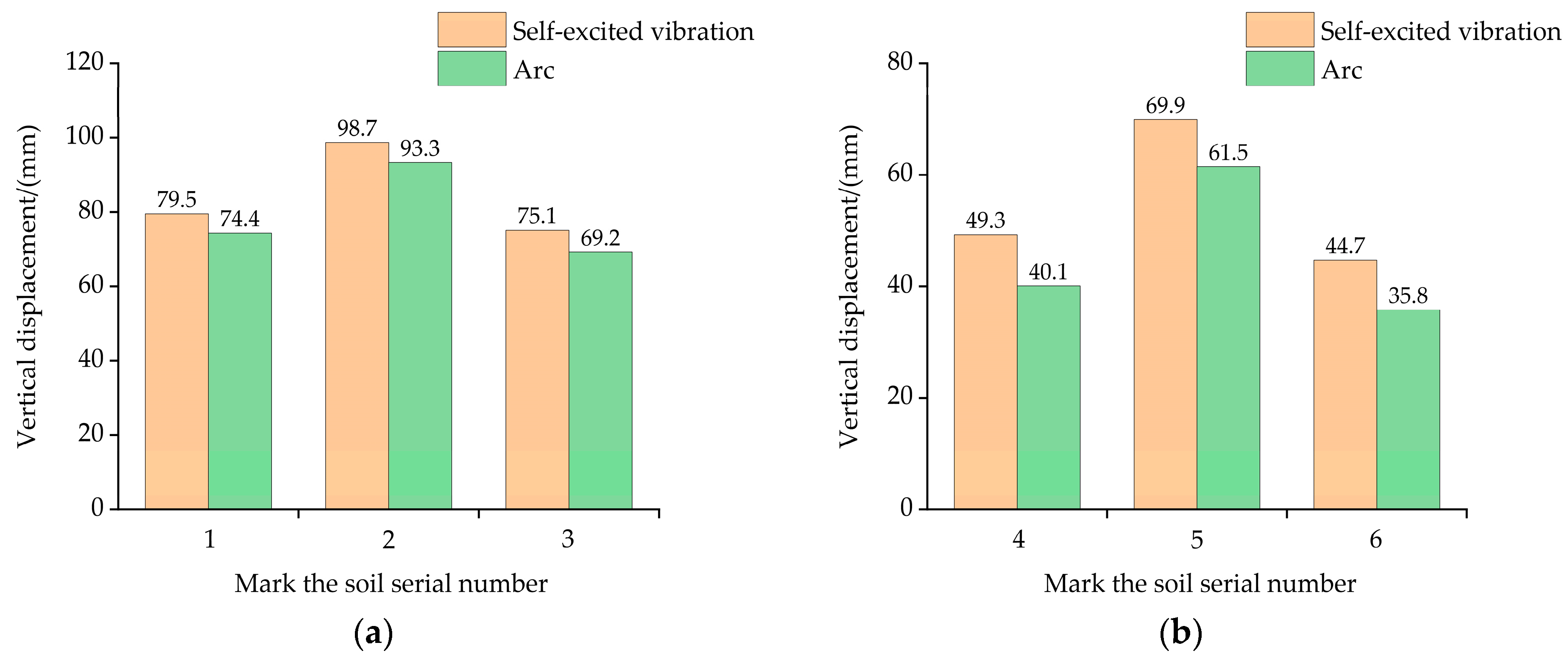
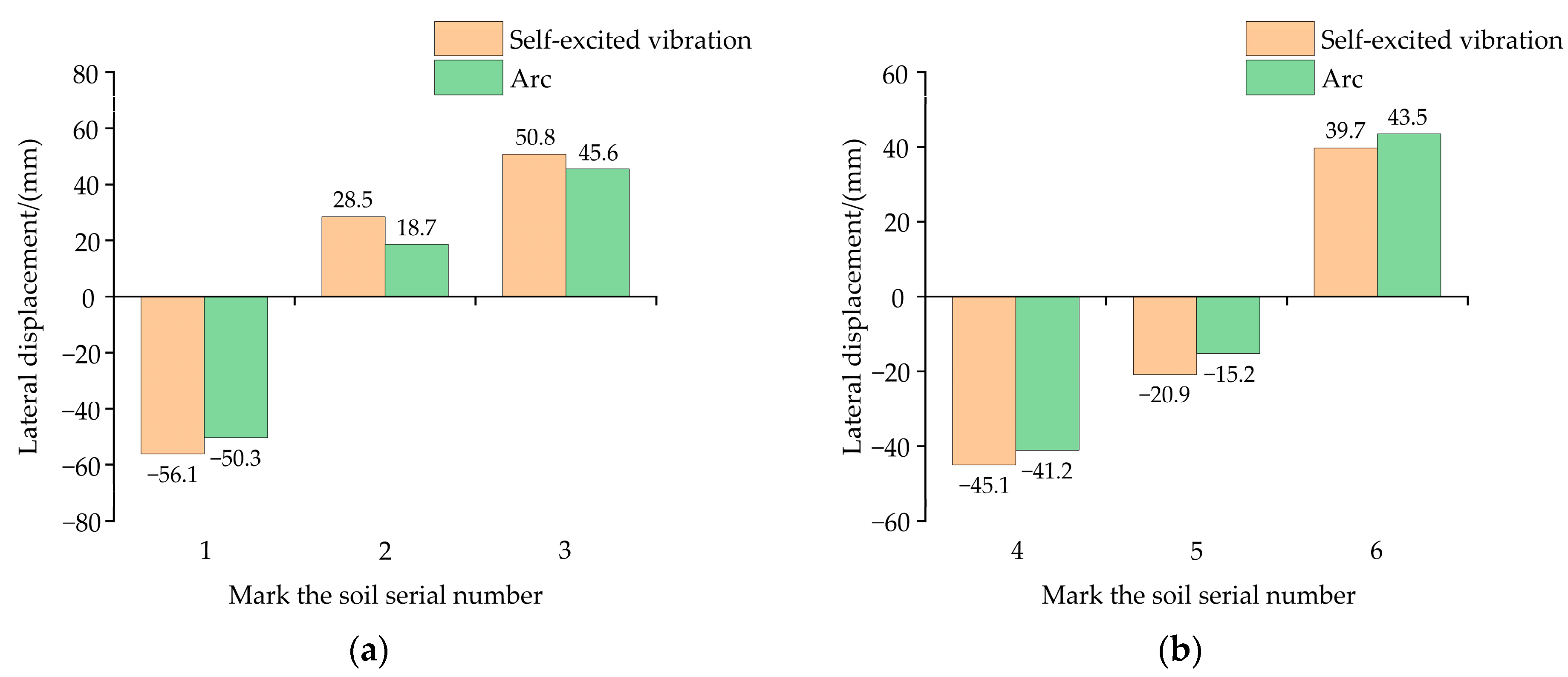
3.2.3. Microprocess Comparative Analysis of the Soil Disturbance Displacement
4. Conclusions
- (1)
- The soil bin test and simulation test results both verify the feasibility of the self-excited vibrating bulldozing plate soil-engaging surface spectrum resistance reduction design method based on the resonance effect and the rationality of the structural design. Compared with the simple circular arc-surface bulldozing plate without frequency spectrum design, the self-excited vibration circular arc-surface bulldozing plate can better improve the resistance reduction effect in the cutting process near the resonance point. Under the research conditions, the bulldozing plate model with an amplitude of 2 mm and a frequency of 29 Hz had the best resistance reduction effect.
- (2)
- The average errors between the horizontal working resistance and vertical working resistance obtained from the simulation model with the corresponding test values are 7.52% and 21.71%, respectively, which verifies the effectiveness of the DEM.
- (3)
- During the cutting process, the horizontal displacement of the surface soil particles is smaller than that of particles in the bottom layer, while the vertical and lateral displacements are larger than those of the bottom layer. In addition, regardless of the depth of the soil particles, the horizontal displacement and vertical displacement of the soil particles at the longitudinal center of the bulldozing plate are larger than those on both sides, while the lateral displacement is smaller than that on both sides.
- (4)
- The self-excited vibrating circular arc-surface bulldozing plate with a specific frequency spectrum structure can increase the fluidity of the disturbed soil in front of the soil-engaging surface during the working process. This is due to the self-excited vibration circular arc-surface bulldozing plate resonating with the soil in a certain range ahead. Because the soil material generally has granular characteristics, the soil in the resonance state will be easily broken, which is not only conducive to changing the flow direction of the soil particles and increasing the fluidity, but also conducive to dispersing the disturbed soil in front of the soil-engaging surface and obtaining a lower cutting resistance. It is an important condition for achieving high-efficiency and energy-saving soil tillage, and it is also an important factor to be considered in the optimal design of the vibration soil cutting machine.
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Tong, J.; Moayad, B.Z. Effects of rake angle of chisel plough on soil cutting factors and power requirements: A computer simulation. Soil Till. Res. 2006, 88, 55–64. [Google Scholar] [CrossRef]
- Ji, W.F.; Chen, D.H.; Jia, H.L.; Tong, J. Experimental investigation into soil-cutting performance of the claws of mole rat (scaptochirus moschatus). J. Bionic. Eng. 2010, 7, S166–S171. [Google Scholar] [CrossRef]
- Ren, L.Q.; Han, Z.W.; Li, J.Q.; Tong, J. Experimental investigation of bionic rough curved soil cutting blade surface to reduce soil adhesion and friction. Soil Till. Res. 2006, 85, 1–12. [Google Scholar] [CrossRef]
- Iman, A. A power estimator for an integrated active-passive tillage machine using the laws of classical mechanics. Soil Till. Res. 2017, 171, 1–8. [Google Scholar]
- Godwin, R.J. A review of the effect of implement geometry on soil failure and implement forces. Soil Till. Res. 2007, 92, 331–400. [Google Scholar] [CrossRef]
- Jia, H.L.; Wang, W.P.; Chen, Z.; Zheng, T.Z.; Zhang, P.; Zhuang, J. Research status and prospect of soil-engaging components optimization for agricultural machinery. Trans. Chin. Soc. Agric. Mach. 2017, 48, 1–13. [Google Scholar]
- Zheng, K.; He, J.; Li, H.W.; Diao, P.S.; Wang, Q.J.; Zhao, H.B. Research on polyline soil-breaking blade subsoiler based on subsoiling soil model using discrete element method. Trans. Chin. Soc. Agric. Mach. 2016, 47, 62–72. [Google Scholar]
- Soni, P.; Salokhe, V.M.; Nakashima, H. Modification of a mouldboard plough surface using arrays of polyethylene protuberances. J. Terramech. 2007, 44, 411–422. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, D.; Yang, L.; Cui, T.; Zhang, W.; Qi, B.; Li, Y.; Zhong, X. Field performance of an electric–hydraulic control system for vibrating subsoiler with flexible tines. Comput. Electron. Agric. 2020, 172, 105377. [Google Scholar] [CrossRef]
- Zhou, D.Y.; Hou, Y.L.; Xin, Y.L.; Wu, B.G.; Ting, J.; Yu, H.Y.; Qi, J.T.; Zhang, J.S.; Zhang, Q. Resistance and consumption reduction mechanism of bionic vibration and verification of field subsoiling experiment. Appl. Sci. 2021, 11, 10480. [Google Scholar] [CrossRef]
- Zhang, X.Y.; Chen, Y. Soil disturbance and cutting forces of four different sweeps for mechanical weeding. Soil Till. Res. 2017, 169, 167–175. [Google Scholar] [CrossRef]
- Wang, Y.X.; Zhang, D.X.; Yang, L.; Cui, T.; Li, Y.H.; Liu, Y.W. Design and experiment of hydraulically self-excited vibration subsoiler. Trans. Chin. Soc. Agric. Eng. 2018, 34, 40–48. [Google Scholar]
- Wang, Y.; Zhang, D.; Yang, L.; Cui, T.; Jing, H.; Zhong, X. Modeling the interaction of soil and a vibrating subsoiler using the discrete element method. Comput. Electron. Agric. 2020, 174, 105518. [Google Scholar] [CrossRef]
- Elyas, R.; Yuness, S. Vibratory soil cutting a new approach for the mathematical analysis. Soil Till. Res. 2016, 159, 33–40. [Google Scholar]
- Niyamapa, T.; Salokhe, V.M. Force and pressure distribution under vibratory tillage tool. J. Terramech. 2000, 37, 139–150. [Google Scholar] [CrossRef]
- Sahay, C.S.; Thomas, E.V.; Satapathy, K.K.; Anthonis, J. Performance evaluation of a novel power-tiller-operated oscillatory tillage implement for dry land tillage. Biosyst. Eng. 2009, 102, 385–391. [Google Scholar] [CrossRef]
- Berntsen, R.; Bere, B.; Torp, T.; Aasen, H. Tine forces established by a two-level model and the draught requirement of rigid and flexible tines. Soil Till. Res. 2006, 90, 230–241. [Google Scholar] [CrossRef]
- Mouazen, A.M.; Duerinckx, K.; Ramon, H.; Anthonis, J. Soil influences on the mechanical actions of a flexible spring tine during selective weed harrowing. Biosyst. Eng. 2007, 96, 7–18. [Google Scholar] [CrossRef]
- Wang, X.Z.; Zhou, H.; Wang, S.S.; Zhou, H.M.; Ji, J.T. Methods for reducing the tillage force of subsoiling tools: A review. Soil Till. Res. 2023, 229, 105676. [Google Scholar] [CrossRef]
- Guo, Z.J.; Qiu, Y.Q.; Yan, X.H.; Wang, J.J.; Zhang, Y.; Zhang, P.G.; Zhang, F. Self-Excited-Resonance of Soil-Engaging Surface Spectrum: A New Method of Soil Cutting Resistance Reduction. Agriculture 2023, 13, 1154. [Google Scholar] [CrossRef]
- Zhang, P.G. Design and Experiment of Drag Reduction on Self-Exciting Vibrating Soil-engaging Surface of Bulldozing Plates with Parabolic Basement. Master’s Thesis, Henan University of Science and Technology, Luoyang, China, 2022. [Google Scholar]
- Guo, Z.J.; Zhou, D.Y.; Zhou, Z.L. Simulation research on mechanical performances of several kinds of cultivating components with different soil-engaging surfaces. J. Mech. Eng. 2010, 46, 71–75. [Google Scholar] [CrossRef]
- Du, G. Experiment Research on Adhesion-reducing and Resistance-decreasing Properties of Macroscopic Soil-engaging Surface for Bulldozing Plates. Master’s Thesis, Henan University of Science and Technology, Luoyang, China, 2011. [Google Scholar]
- Wu, T.; Huang, W.F.; Chen, X.S.; Ma, X.; Han, Z.Q.; Pan, T. Calibration of discrete element model parameters for cohesive soil considering the cohesion between particles. J. South China Agric. Univ. 2017, 38, 93–98. [Google Scholar]
- Qiu, Y.Q.; Guo, Z.J.; Jin, X.; Zhang, P.G.; Si, S.J.; Guo, F.G. Calibration and verification test of cinnamon soil simulation parameters based on discrete element method. Agriculture 2022, 12, 1082. [Google Scholar] [CrossRef]
- Yu, Z.S. The comfort of a car. In Automobile Theory, 6th ed.; China Machine press: Beijing, China, 2019; pp. 246–247. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Number | Frequency Ratio | Impact Frequency (Hz) | Working Speed (m·s−1) | Spatial Geometric Frequency (mm−1) | Wavelengths (mm) | Directrix Equation |
|---|---|---|---|---|---|---|
| 1 | 0.034 | 1 | 0.16 | 0.00625 | 160 | z = F(x) + Aisin(0.039x) |
| 2 | 0.75 | 22 | 0.16 | 0.1375 | 7.3 | z = F(x) + Aisin(0.864x) |
| 3 | 1 | 29 | 0.16 | 0.18125 | 5.5 | z = F(x) + Aisin(1.138x) |
| 4 | 1.25 | 37 | 0.16 | 0.23125 | 4.3 | z = F(x) + Aisin(1.452x) |
| 5 | 1.414 | 41 | 0.16 | 0.25625 | 3.9 | z = F(x) + Aisin(1.609x) |
| 6 | 1.758 | 52 | 0.16 | 0.325 | 3.1 | z = F(x) + Aisin(2.041x) |
| Parameter | Value |
|---|---|
| Height of blade (mm) | 150 |
| Width of blade (mm) | 240 |
| Cutting angle (°) | 78 |
| Clearance angle (°) | 30 |
| Shovel point closed angle (°) | 48 |
| Skew angle (°) | 78 |
| Parameter | Value | Source |
|---|---|---|
| Soil shear modulus (MPa) | 3.846 | Test |
| Soil bulk density (kg·m−3) | 1394 | Test |
| Soil Poisson’s ratio | 0.3 | Calibration |
| Steel shear modulus (MPa) | 7900 | Reference [25] |
| Steel bulk density (kg·m−3) | 7850 | Reference [25] |
| Steel Poisson’s ratio | 0.3 | Reference [25] |
| Soil–soil recovery coefficient | 0.45 | Calibration |
| Soil–soil static friction coefficient | 0.56 | Calibration |
| Soil–soil rolling friction coefficient | 0.08 | Calibration |
| Soil–steel recovery coefficient | 0.45 | Calibration |
| Soil–steel rolling friction coefficient | 0.125 | Calibration |
| Soil–steel static friction coefficient | 0.64 | Calibration |
| Surface energy of soil for JKR model/(J·m−2) | 0.37 | Calibration |
| Level | Factors | |
|---|---|---|
| Frequency (Hz) | Amplitude (mm) | |
| 1 | 1 | 1 |
| 2 | 22 | 2 |
| 3 | 29 | 3 |
| 4 | 37 | |
| 5 | 41 | |
| 6 | 52 | |
| Number | Factor | Horizontal Resistance (N) | Vertical Resistance (N) | |||||
|---|---|---|---|---|---|---|---|---|
| Frequency (Hz) | Amplitude (mm) | Simulation Value | Test Value | Relative Error | Simulation Value | Test Value | Relative Error | |
| 1 | 1(1) | 1(1) | 234.32 | 260.58 | 10.08% | 22.15 | 28.6 | 22.55% |
| 2 | 4(22) | 1(1) | 218.47 | 247.49 | 11.73% | 20.24 | 29.06 | 30.35% |
| 3 | 5(29) | 1(1) | 214.36 | 232.88 | 7.95% | 21.34 | 29.62 | 27.95% |
| 4 | 6(37) | 1(1) | 219.13 | 265.43 | 17.44% | 21.66 | 27.28 | 20.60% |
| 5 | 7(41) | 1(1) | 237.11 | 237.28 | 0.07% | 24.12 | 24.31 | 0.78% |
| 6 | 8(52) | 1(1) | 247.73 | 248.44 | 0.29% | 22.98 | 28.69 | 19.90% |
| 7 | 1(1) | 2(2) | 237.81 | 242.19 | 1.81% | 22.44 | 24.76 | 9.37% |
| 8 | 4(22) | 2(2) | 213.85 | 228.53 | 6.42% | 20.13 | 27.68 | 27.28% |
| 9 | 5(29) | 2(2) | 204.92 | 220.72 | 7.16% | 18.35 | 27.74 | 33.85% |
| 10 | 6(37) | 2(2) | 221.68 | 237.69 | 6.74% | 21.73 | 29.69 | 26.81% |
| 11 | 7(41) | 2(2) | 226.83 | 268.09 | 15.39% | 21.47 | 30.37 | 29.31% |
| 12 | 8(52) | 2(2) | 250.37 | 269.96 | 7.26% | 24.85 | 29.56 | 15.93% |
| 13 | 1(1) | 3(3) | 245.63 | 236.18 | −4.00% | 22.93 | 26.3 | 12.81% |
| 14 | 4(22) | 3(3) | 240.82 | 269.81 | 10.74% | 21.41 | 25.27 | 15.28% |
| 15 | 5(29) | 3(3) | 223.87 | 260.97 | 14.22% | 19.47 | 31.2 | 37.60% |
| 16 | 6(37) | 3(3) | 227.11 | 241.94 | 6.13% | 20.44 | 27.67 | 26.13% |
| 17 | 7(41) | 3(3) | 230.72 | 256.67 | 10.11% | 21.96 | 29.25 | 24.92% |
| 18 | 8(52) | 3(3) | 256.61 | 271.19 | 5.38% | 25.03 | 29.53 | 15.24% |
| 19 | Circular arc surface | 238.27 | 258.63 | 7.87% | 22.99 | 27.33 | 15.88% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Z.; Qiu, Y.; Yan, X.; Wang, J.; Si, S.; Guo, F.; Zhang, F. Research on the Resistance Reduction Law of Self-Excited a Resonant Circular Arc-Surface Bulldozing Plate Based on the Discrete Element Method. Agriculture 2023, 13, 1880. https://doi.org/10.3390/agriculture13101880
Guo Z, Qiu Y, Yan X, Wang J, Si S, Guo F, Zhang F. Research on the Resistance Reduction Law of Self-Excited a Resonant Circular Arc-Surface Bulldozing Plate Based on the Discrete Element Method. Agriculture. 2023; 13(10):1880. https://doi.org/10.3390/agriculture13101880
Chicago/Turabian StyleGuo, Zhijun, Yiqing Qiu, Xianghai Yan, Jiajia Wang, Shengjie Si, Fugui Guo, and Fu Zhang. 2023. "Research on the Resistance Reduction Law of Self-Excited a Resonant Circular Arc-Surface Bulldozing Plate Based on the Discrete Element Method" Agriculture 13, no. 10: 1880. https://doi.org/10.3390/agriculture13101880
APA StyleGuo, Z., Qiu, Y., Yan, X., Wang, J., Si, S., Guo, F., & Zhang, F. (2023). Research on the Resistance Reduction Law of Self-Excited a Resonant Circular Arc-Surface Bulldozing Plate Based on the Discrete Element Method. Agriculture, 13(10), 1880. https://doi.org/10.3390/agriculture13101880