
Spatiotemporal Matching Cost Function Based on Differential Evolutionary Algorithm for Random Speckle 3D Reconstruction


Abstract
:1. Introduction
- (1)
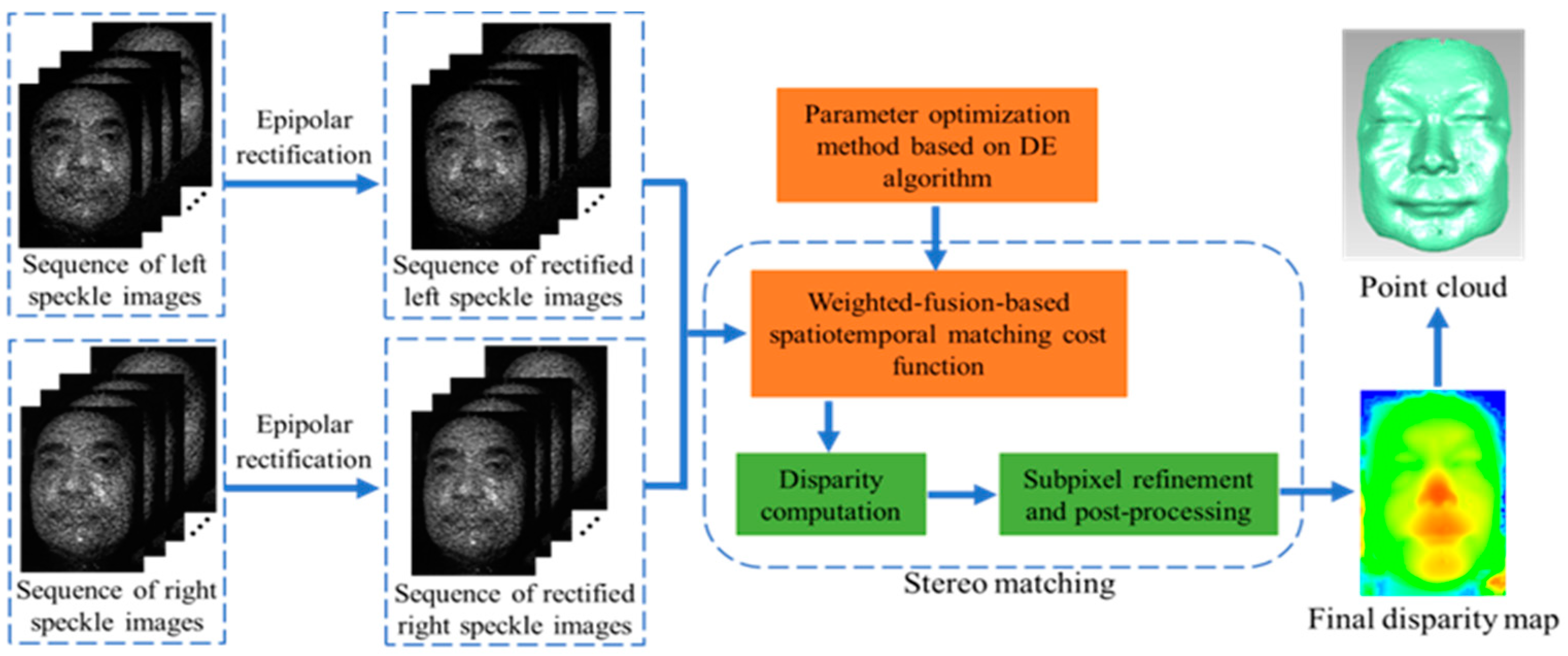
- A weighted-fusion-based spatiotemporal matching cost function (STMCF) is proposed for accurately searching the matching point pairs between left and right speckle images.
- (2)
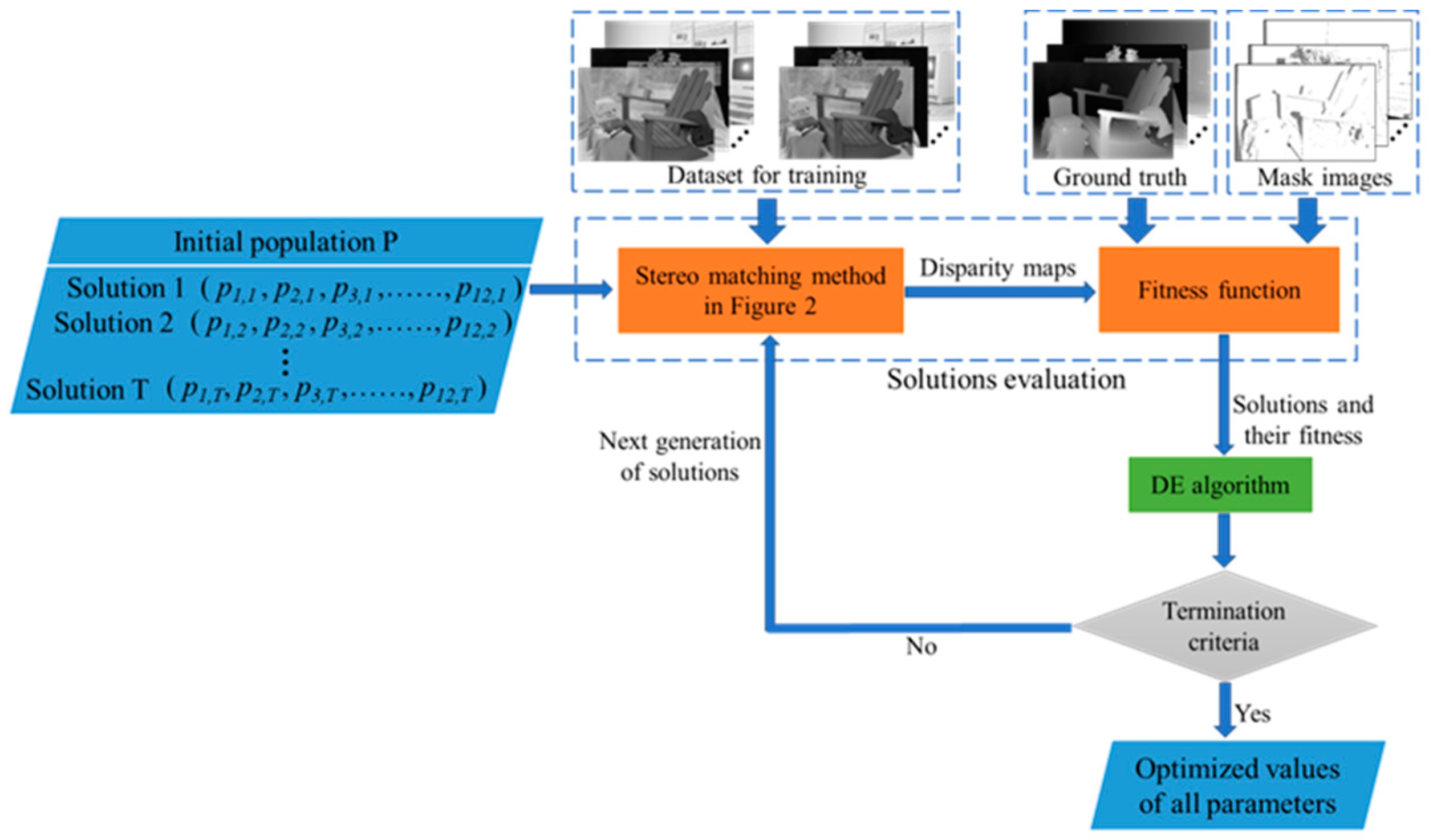
- In order to automatically determine the value of each parameter used in STMCF, a parameter optimization method based on differential evolutionary (DE) algorithm is designed and a training strategy is explored in this method.
- (3)
- A series of comparative experimental results indicate that our scheme can achieve accurate and high-quality 3D reconstruction efficiently and the proposed STMCF can provide better performance on the aspects of accuracy, computation time and reconstruction quality than the state-of-the-art method based on spatiotemporal correlation, which is widely used in random speckle 3D reconstruction.
2. Related Works
2.1. Weighted-Fusion-Based Matching Cost Function
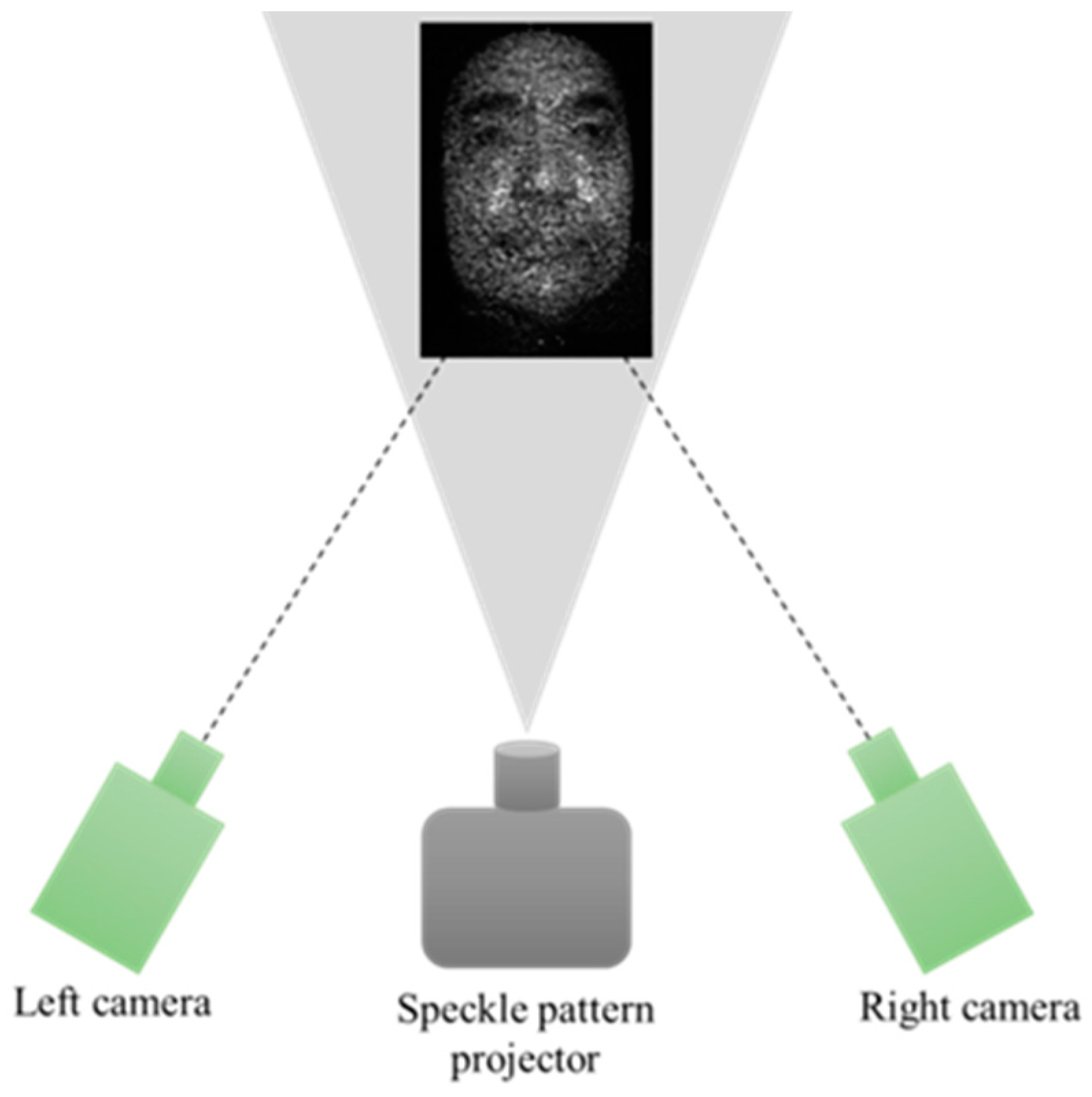
2.2. 3D Reconstruction Based on Binocular Stereo Vision with Random Speckle Projection
3. STMCF
4. Disparity Computation and Subpixel Refinement
5. Parameter Optimization Method Based on DE Algorithm
5.1. Population Initialization
5.2. Solution Evaluation
5.3. L-SHADE
| Algorithm 1: L-SHADE algorithm |
| 1: // Initialization phase 2: G = 1, NG = Ninit, Archive A = ϕ; 3: Initialize population PG = (x1,G, ..., xN,G) randomly; 4: Set all values in MCR, MF to 0.5; 5: // Main loop 6: while The termination criteria are not met do 7: SCR = ϕ, SF = ϕ; 8: for i = 1 to N do 9: ri = Select from [1, H] randomly; 10: if MCR,ri =⊥ then 11: CRi,G = 0; 12: else 13: CRi,G =randni(MCR,ri, 0.1); 14: end if 15: Fi,G =randci(MF,ri, 0.1); 16: Generate trial vector ui,G according to 17: current-to-pbest/1/bin; 18: end for 19: for i = 1 to N do 20: if f (ui,G) ≤ f (xi,G) then 21: xi,G+1 = ui,G; 22: else 23: xi,G+1 = xi,G; 24: end if 25: if f (ui,G) < f (xi,G) then 26: xi,G → A; 27: CRi,G → SCR, Fi,G → SF; 28: end if 29: end for 30: If necessary, delete randomly selected individuals from the archive such that the archive size is |A|; 31: Update memories MCR and MF using Algorithm 2; 32: // LPSR strategy 33: Calculate NG+1 according to Eq.(x); 34: if NG+1 < NG then 35: Sort individuals in P based on their fitness values and delete highest NG − NG+1 members; 36: Resize archive size |A| according to new |P |; 37: end if 38: G + +; 39: end while |
| Algorithm 2: Memory update algorithm |
| 1: if SCR ≠ ϕ and SF ≠ ϕ then 2: if MCR,k,G =⊥ or max(SCR) = 0 then 3: MCR,k,G+1 =⊥; 4: else 5: MCR,k,G+1 =meanWL(SCR); 6: end if 7: MF,k,G+1 =meanWL(SF ); 8: k + +; 9: if k > H then 10: k = 1; 11: end if 12: else 13: MCR,k,G+1 = MCR,k,G; 14: MF,k,G+1 = MF,k,G; 15: end if |
6. Experiments and Discussion
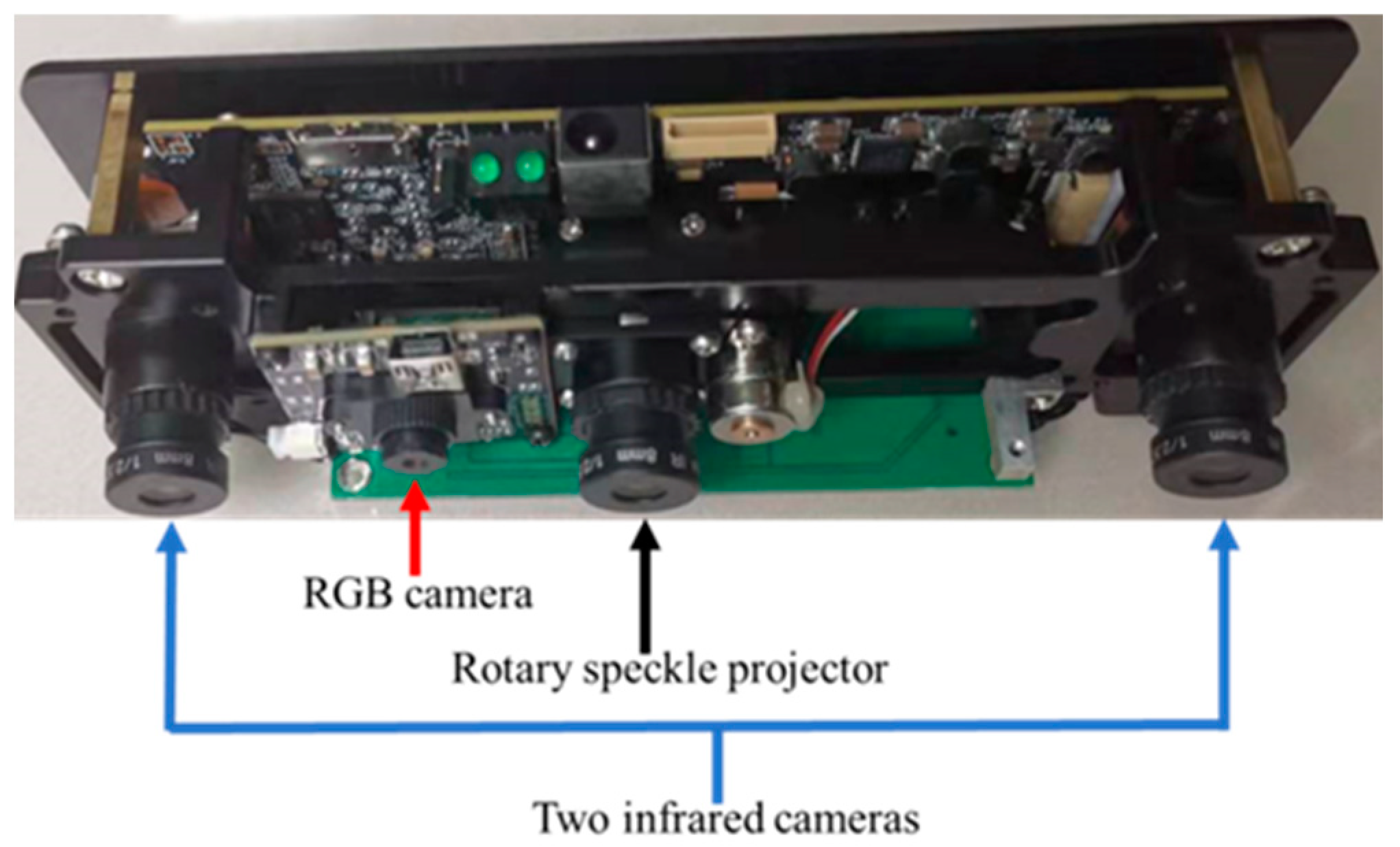
6.1. Setup
6.2. Effectiveness of the Proposed Gradient Computing Method
6.3. Experimental Comparison with the State-of-the-Art Method Based on Spatiotemporal Correlation
6.3.1. Comparison of Reconstruction Accuracy
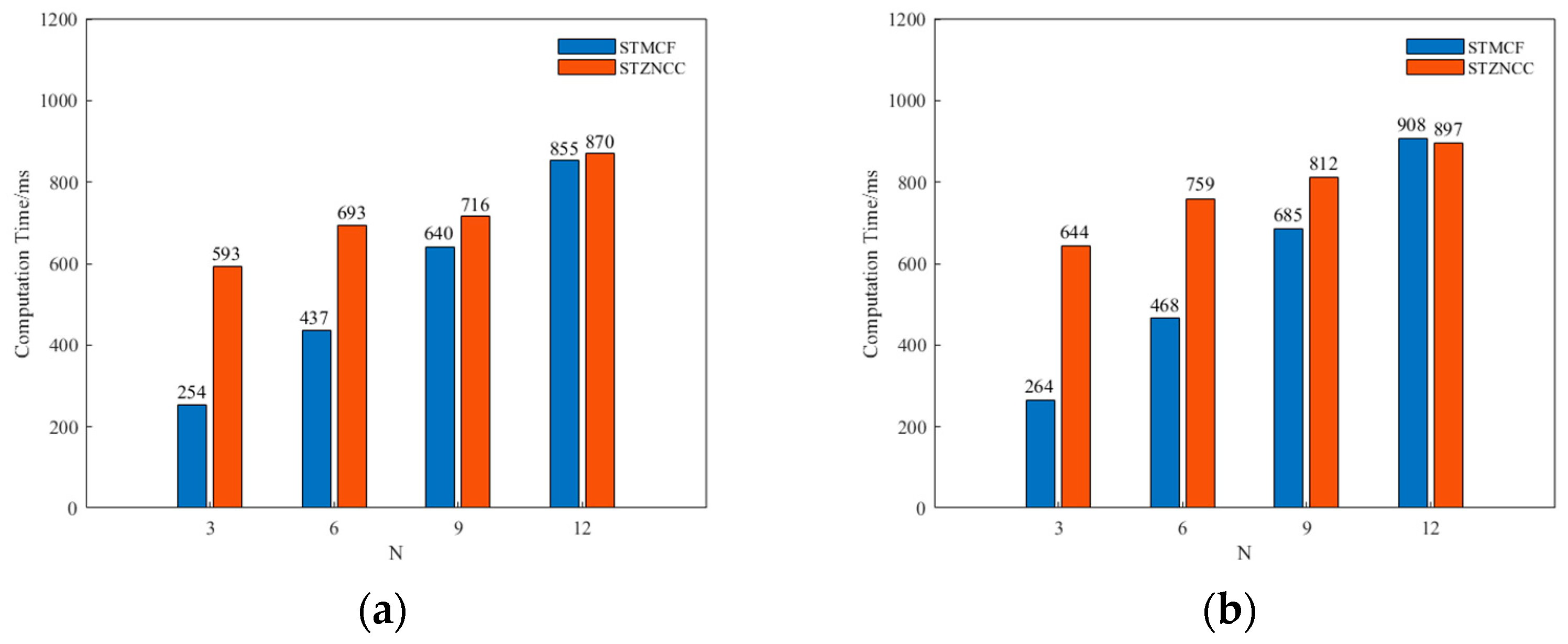
6.3.2. Comparison of Computation Time
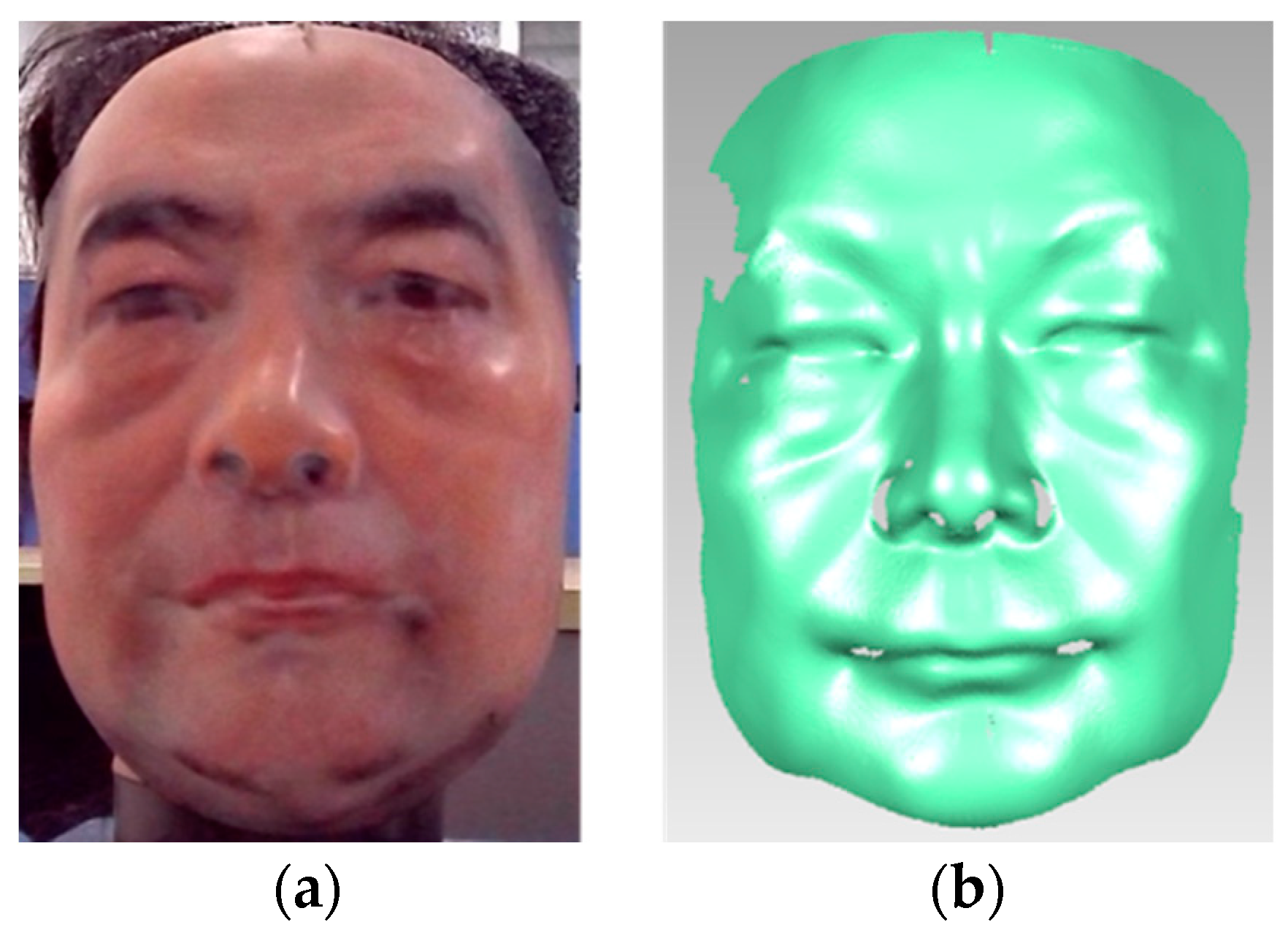
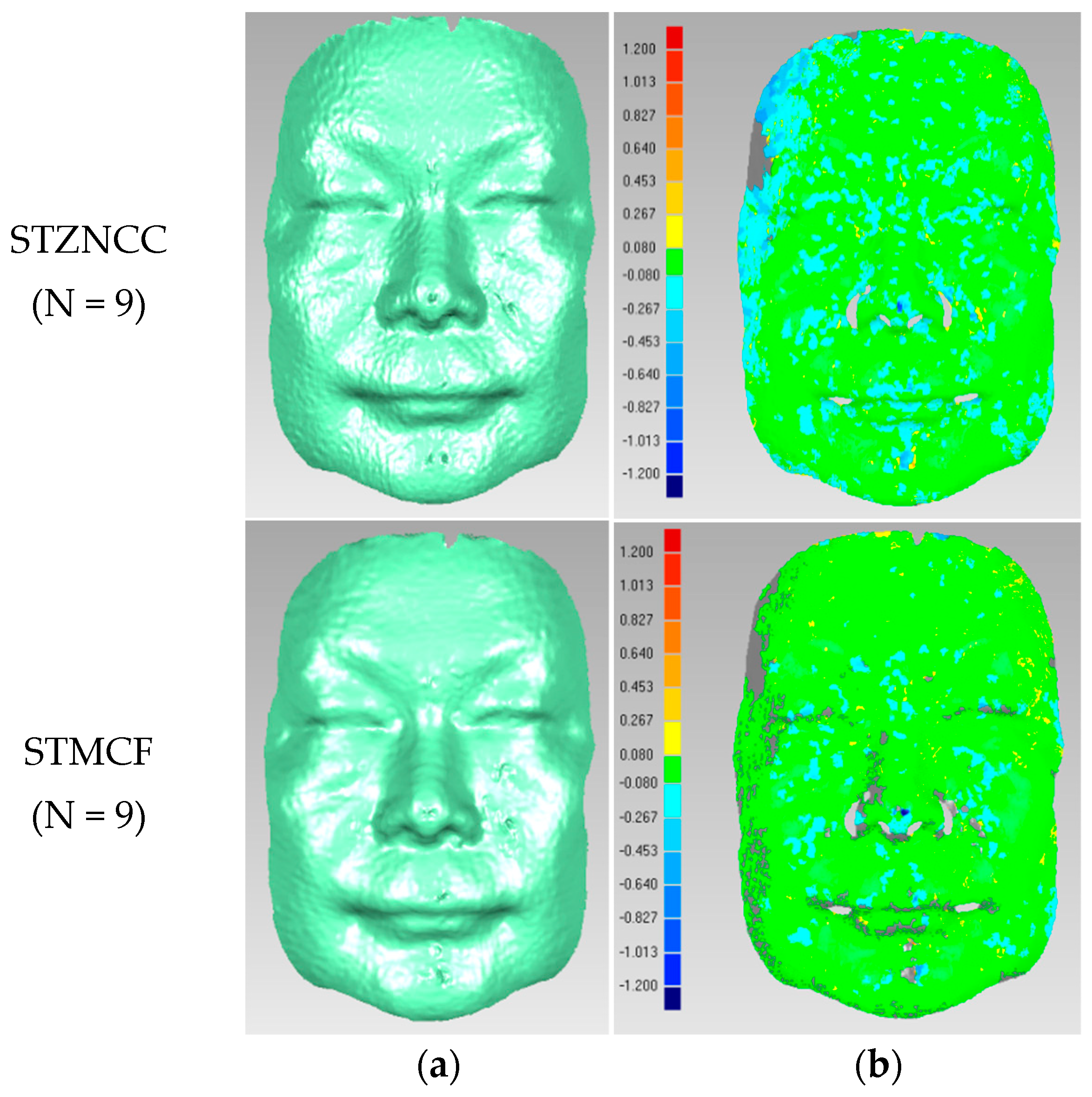
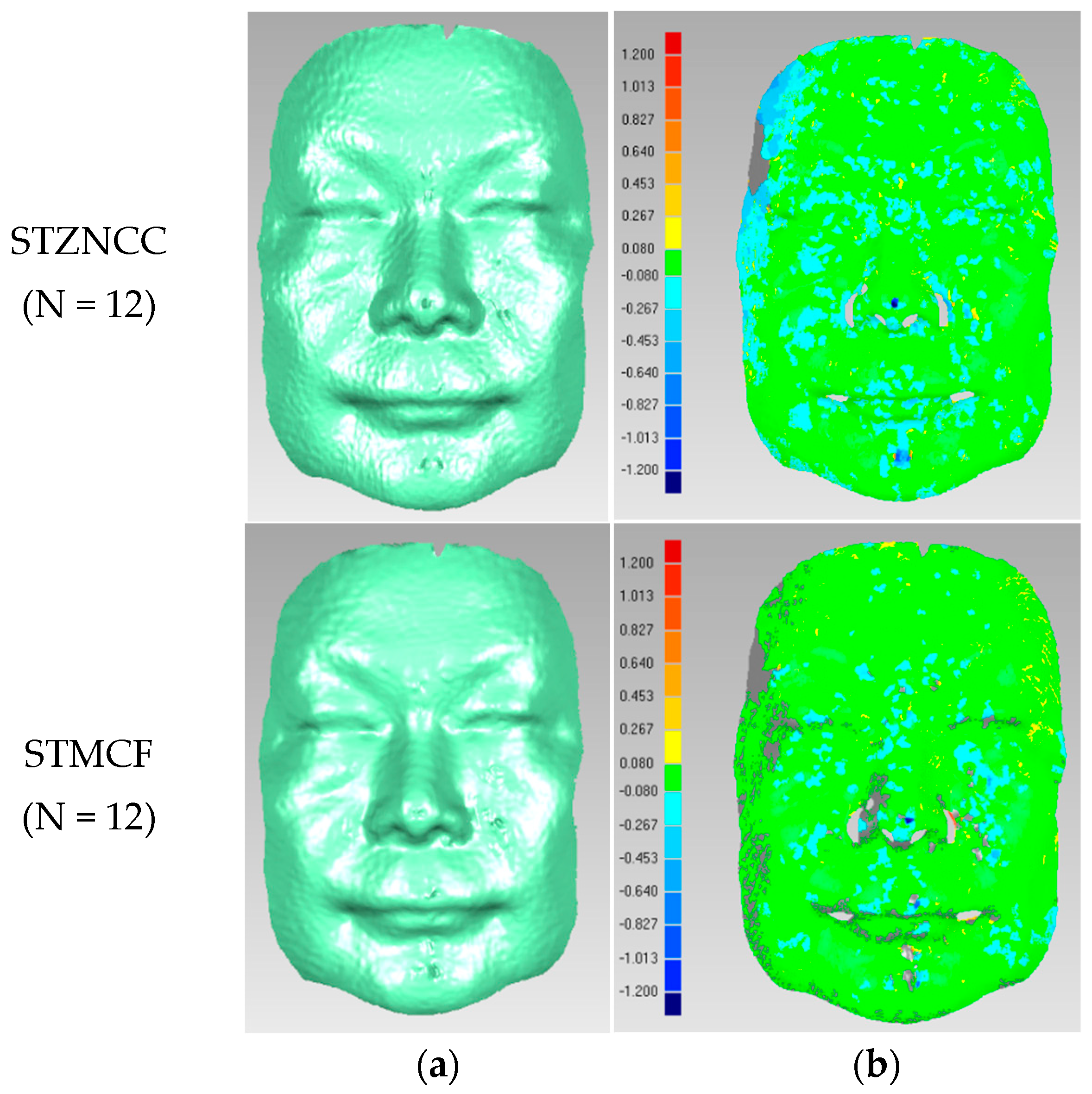
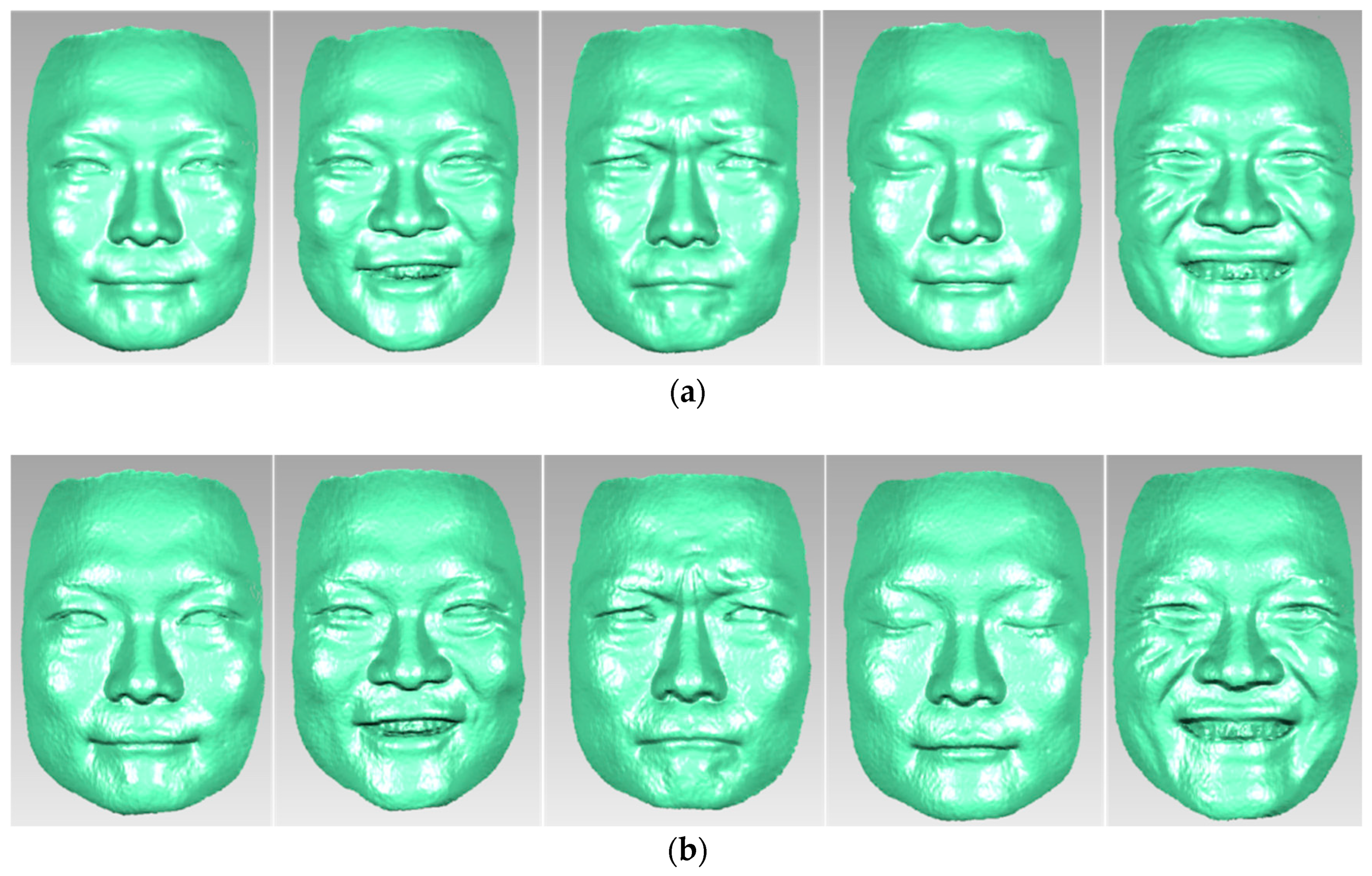
6.3.3. Comparison of Real Human Face Reconstruction
6.4. Discussion
- (1)
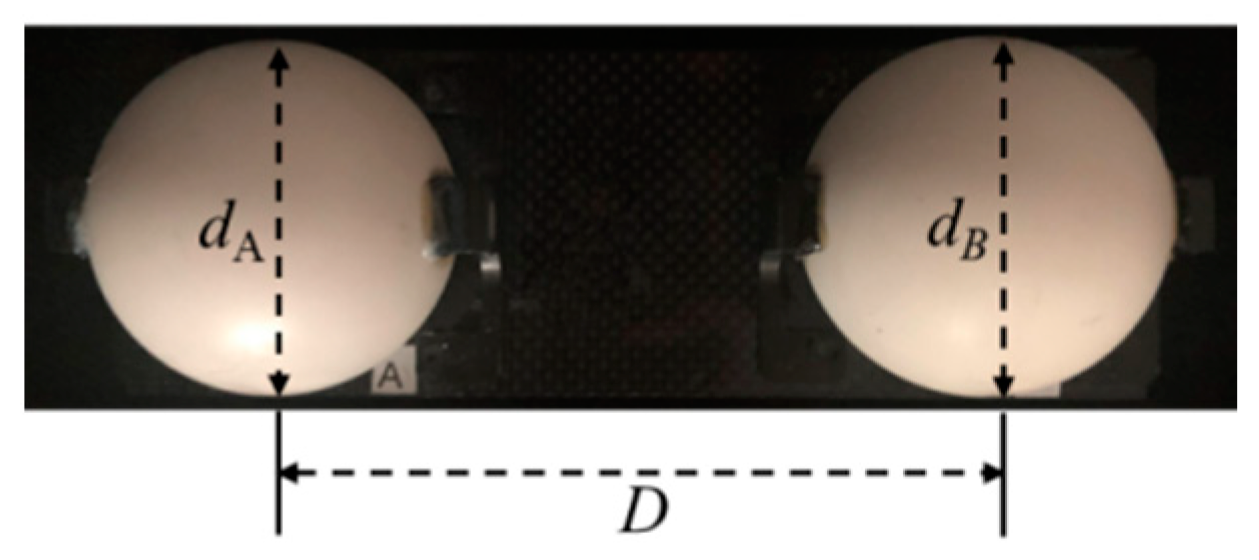
- The error of dA, dB and D shown in Table 4 and Table 5 do not decrease with the increase of N, which is not consistent with the results presented in Figure 7. That is because the measured result of dA, dB and D are obtained by least square sphere fitting algorithm; similar results have also been reported in the literature [24]. Nevertheless, the error statistics shown in Figure 7 are calculated by a comparison between the reconstruction result and ground truth.
- (2)
- According to the results of Figure 12, on the whole, the performance of STMCF is better than STZNCC in terms of computation time. However, it is easily observable that the growth rate of STMCF in computation time is higher than that of STZNCC. So, when the value of N is smaller, the advantage of STMCF in computation time is more obvious.
- (3)
- Since there is no suitable training data with ground truth, a training strategy is explored in this paper. Experimental results validate the effectiveness of the strategy. This shows that the training results acquired from passive stereo vision data can be applied to the stereo matching of speckle stereo image pairs when the image acquisition environment is similar. The above conclusion can be helpful for other relative research works.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Molleda, J.; Usamentiaga, R.; García, D.F.; Bulnes, F.G.; Espina, A.; Dieye, B.; Smith, L.N. An improved 3D imaging system for dimensional quality inspection of rolled products in the metal industry. Comput. Ind. 2013, 64, 1186–1200. [Google Scholar] [CrossRef]
- Du, G.; Zhou, M.; Ren, P.; Shui, W.; Zhou, P.; Wu, Z. A 3D modeling and measurement system for cultural heritage preservation. In Proceedings of the International Conference on Optical and Photonic Engineering, Singapore, 14–16 April 2015; p. 952420. [Google Scholar]
- Gherardini, F.; Leali, F. A framework for 3D pattern analysis and reconstruction of Persian architectural elements. Nexus Netw. J. 2016, 18, 133–167. [Google Scholar] [CrossRef] [Green Version]
- Microsoft, Kinect for Windows. Available online: https://developer.microsoft.com/en-us/windows/kinect (accessed on 14 April 2022).
- Kolmogorov, V.; Zabih, R. Computing visual correspondence with occlusions using graph cuts. In Proceedings of the Eighth IEEE International Conference on Computer Vision, Vancouver, BC, Canada, 7–14 July 2001; pp. 508–515. [Google Scholar]
- Sun, J.; Zheng, N.N.; Shum, H.Y. Stereo matching using belief propagation. IEEE Trans. Pattern Anal. Mach. Intell. 2003, 25, 787–800. [Google Scholar]
- Hirschmuller, H. Stereo processing by semiglobal matching and mutual information. IEEE Trans. Pattern Anal. Mach. Intell. 2008, 30, 328–341. [Google Scholar] [CrossRef]
- Scharstein, D.; Szeliski, R.; Zabih, R. A taxonomy and evaluation of dense two-frame stereo correspondence algorithms. In Proceedings of the IEEE Workshop on Stereo and Multi-Baseline Vision, Kauai, HI, USA, 9–10 December 2001; pp. 131–140. [Google Scholar]
- Kim, S.; Min, D.; Kim, S.; Sohn, K. Unified confidence estimation networks for robust stereo matching. IEEE Trans. Image Processing 2019, 28, 1299–1313. [Google Scholar] [CrossRef]
- Chang, J.R.; Chen, Y.S. Pyramid stereo matching network. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 5410–5418. [Google Scholar]
- Bouquet, G.; Thorstensen, J.; Bakke, K.A.H.; Risholm, P. Design tool for TOF and SL based 3D cameras. Opt. Express 2017, 25, 27758–27769. [Google Scholar] [CrossRef] [Green Version]
- Zhang, S. High-speed 3D shape measurement with structured light methods: A review. Opt. Lasers Eng. 2018, 106, 119–131. [Google Scholar] [CrossRef]
- Zuo, C.; Feng, S.; Huang, L.; Tao, T.; Yin, W.; Chen, Q. Phase shifting algorithms for fringe projection profilometry: A review. Opt. Lasers Eng. 2018, 109, 23–59. [Google Scholar] [CrossRef]
- Zhou, P.; Zhu, J.P.; Jing, H.L. Optical 3-D surface reconstruction with color binary speckle pattern encoding. Opt. Express 2018, 26, 3452–3465. [Google Scholar] [CrossRef]
- Keselman, L.; Woodfill, J.I.; Grunnet-Jepsen, A.; Bhowmik, A. Intel®RealSense™ Stereoscopic Depth Cameras. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Honolulu, HI, USA, 21–26 July 2017; pp. 1267–1276. [Google Scholar]
- Zhou, P.; Zhu, J.P.; Xiong, W.; Zhang, J.W. 3D face imaging with the spatial-temporal correlation method using a rotary speckle projector. Appl. Opt. 2021, 60, 5925–5935. [Google Scholar] [CrossRef]
- Mei, X.; Sun, X.; Zhou, M.; Jiao, S.; Wang, H.; Zhang, X.P. On building an accurate stereo matching system on graphics hardware. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Barcelona, Spain, 6–13 November 2011; pp. 467–474. [Google Scholar]
- Zabih, R.; Woodfill, J. Non-parametric local transforms for computing visual correspondence. In Proceedings of the European Conference on Computer Vision, Stockholm, Sweden, 2–6 May 1994; pp. 151–158. [Google Scholar]
- Hosni, A.; Rhemann, C.; Bleyer, M.; Rother, C.; Gelautz, M. Fast cost-volume filtering for visual correspondence and beyond. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 504–511. [Google Scholar] [CrossRef] [PubMed]
- Hamzah, R.A.; Ibrahim, H.; Abu Hassan, A.H. Stereo matching algorithm based on per pixel difference adjustment, iterative guided filter and graph segmentation. J. Vis. Commun. Image Represent. 2017, 42, 145–160. [Google Scholar] [CrossRef]
- Hong, P.N.; Ahn, C.W. Robust matching cost function based on evolutionary approach. Expert Syst. Appl. 2020, 161, 113712. [Google Scholar] [CrossRef]
- Gu, F.F.; Song, Z.; Zhao, Z. Single-shot structured light sensor for 3D dense and dynamic reconstruction. Sensors 2020, 20, 1094. [Google Scholar] [CrossRef] [Green Version]
- Yin, W.; Hu, Y.; Feng, S.; Huang, L.; Kemao, Q.; Chen, Q.; Zuo, C. Single-shot 3D shape measurement using an end-to-end stereo matching network for speckle projection profilometry. Opt. Express 2021, 29, 13388–13407. [Google Scholar] [CrossRef]
- Tang, Q.; Liu, C.; Cai, Z.; Zhao, H.; Liu, X.; Peng, X. An improved spatiotemporal correlation method for high-accuracy random speckle 3D reconstruction. Opt. Lasers Eng. 2018, 110, 54–62. [Google Scholar] [CrossRef]
- Fu, K.; Xie, Y.; Jing, H.L.; Zhu, J.P. Fast spatial-temporal stereo matching for 3D face reconstruction under speckle pattern projection. Image Vis. Comput. 2019, 85, 36–45. [Google Scholar] [CrossRef]
- Harendt, B.; Große, M.; Schaffer, M.; Kowarschik, R. 3D shape measurement of static and moving objects with adaptive spatiotemporal correlation. Appl. Opt. 2014, 53, 7507–7515. [Google Scholar] [CrossRef]
- Kong, L.Y.; Zhu, J.P.; Ying, S.C. Stereo matching based on guidance image and adaptive support region. Acta Opt. Sin. 2020, 40, 0915001. [Google Scholar] [CrossRef]
- He, K.M.; Sun, J.; Tang, X. Guided image filtering. IEEE Trans. Pattern Anal. Mach. Intell. 2013, 35, 1397–1409. [Google Scholar] [CrossRef]
- Haller, I.; Nedevschi, S. Design of Interpolation Functions for Subpixel-Accuracy Stereo-Vision Systems. IEEE Trans. Image Processing 2012, 21, 889–898. [Google Scholar] [CrossRef] [PubMed]
- Scharstein, D.; Hirschmüller, H.; Kitajima, Y.; Krathwohl, G.; Nešić, N.; Wang, X.; Westling, P. High-resolution stereo datasets with subpixel-accurate ground truth. In Proceedings of the German Conference on Pattern Recognition, Munich, Germany, 2–5 September 2014; pp. 31–42. [Google Scholar]
- Tanabe, R.; Fukunaga, A.S. Improving the search performance of shade using linear population size reduction. In Proceedings of the IEEE Congress on Evolutionary Computation, Beijing, China, 6–11 July 2014; pp. 1658–1665. [Google Scholar]
- Zhang, Z. A flexible new technique for camera calibration. IEEE Trans. Pattern Anal. Mach. Intell. 2000, 22, 1330–1334. [Google Scholar] [CrossRef] [Green Version]
- Optical 3-D Measuring Systems—Optical Systems Based on Area Scanning: VDI/VDE 2634 Blatt 2-2012; Beuth Verlag: Berlin, Germany, 2012.
- Zhou, P.; Zhu, J.P.; You, Z.S. 3-D face registration solution with speckle encoding based spatial-temporal logical correlation algorithm. Opt. Express 2019, 27, 21004–21019. [Google Scholar] [CrossRef] [PubMed]
- Xiong, W.; Yang, H.Y.; Zhou, P.; Fu, K.R.; Zhu, J.P. Spatiotemporal correlation-based accurate 3D face imaging using speckle projection and real-time improvement. Appl. Sci. 2021, 11, 8588. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| No. | Name | Meaning |
|---|---|---|
| 1 | r | Local window radius of the guided filter. |
| 2 | eps | Regularization parameter of the guided filter. |
| 3 | W_AD | The weight value of AD. |
| 4 | W_Census | The weight value of Census transformation. |
| 5 | W_grad_x | The weight value of horizontal image gradient. |
| 6 | W_grad_y | The weight value of vertical image gradient. |
| 7 | cen_win_h | Window height of Census transformation. |
| 8 | cen_win_w | Window width of Census transformation. |
| 9 | T_ad | The truncation threshold value of AD. |
| 10 | T_census | The truncation threshold value of Census transformation. |
| 11 | T_grad_x | The truncation threshold value of horizontal image gradient. |
| 12 | T_grad_y | The truncation threshold value of vertical image gradient. |
| No. | Name | Data Type | Value Range |
|---|---|---|---|
| 1 | r | Integer | [1, 20] |
| 2 | eps | Float point | [0.0001, 1] |
| 3 | W_AD | Float point | [0, 1] |
| 4 | W_Census | Float point | [0, 1] |
| 5 | W_grad_x | Float point | [0, 1] |
| 6 | W_grad_y | Float point | [0, 1] |
| 7 | cen_win_h | Integer | [3, 21] |
| 8 | cen_win_w | Integer | [3, 21] |
| 9 | T_ad | Float point | [0, 0.5] |
| 10 | T_census | Float point | [0, 0.5] |
| 11 | T_grad_x | Float point | [0, 0.5] |
| 12 | T_grad_y | Float point | [0, 0.5] |
| No. | Name | Optimized Value |
|---|---|---|
| 1 | R | 1 |
| 2 | Eps | 0.8207 |
| 3 | W_AD | 0.3032 |
| 4 | W_Census | 0.2307 |
| 5 | W_grad_x | 0.9224 |
| 6 | W_grad_y | 0.6365 |
| 7 | cen_win_h | 5 |
| 8 | cen_win_w | 13 |
| 9 | T_ad | 0.4330 |
| 10 | T_census | 0.4155 |
| 11 | T_grad_x | 0.0646 |
| 12 | T_grad_y | 0.1515 |
| N | Method | Abs.Err (1) (dA) | Abs.Err (dB) | Abs.Err (D) |
|---|---|---|---|---|
| 3 | Not (2) | 0.0733 | 0.0794 | 0.0496 |
| Include (3) | 0.0282 | 0.0140 | 0.0315 | |
| 6 | Not | 0.0370 | 0.0871 | 0.0480 |
| Include | 0.0255 | 0.0101 | 0.0445 | |
| 9 | Not | 0.0256 | 0.0860 | 0.0629 |
| Include | 0.0113 | 0.0471 | 0.0487 | |
| 12 | Not | 0.0429 | 0.0681 | 0.0475 |
| Include | 0.0390 | 0.0123 | 0.0436 |
| N | Method | Abs.Err (dA) | Abs.Err (dB) | Abs.Err (D) |
|---|---|---|---|---|
| 3 | STZNCC | 0.0518 | 0.0120 | 0.0316 |
| STMCF | 0.0282 | 0.0140 | 0.0315 | |
| 6 | STZNCC | 0.0613 | 0.0414 | 0.0533 |
| STMCF | 0.0255 | 0.0101 | 0.0445 | |
| 9 | STZNCC | 0.0305 | 0.0743 | 0.0580 |
| STMCF | 0.0113 | 0.0471 | 0.0487 | |
| 12 | STZNCC | 0.0519 | 0.0551 | 0.0530 |
| STMCF | 0.0390 | 0.0123 | 0.0436 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kong, L.; Xiong, W.; Ying, S. Spatiotemporal Matching Cost Function Based on Differential Evolutionary Algorithm for Random Speckle 3D Reconstruction. Appl. Sci. 2022, 12, 4132. https://doi.org/10.3390/app12094132
Kong L, Xiong W, Ying S. Spatiotemporal Matching Cost Function Based on Differential Evolutionary Algorithm for Random Speckle 3D Reconstruction. Applied Sciences. 2022; 12(9):4132. https://doi.org/10.3390/app12094132
Chicago/Turabian StyleKong, Lingyin, Wei Xiong, and Sancong Ying. 2022. "Spatiotemporal Matching Cost Function Based on Differential Evolutionary Algorithm for Random Speckle 3D Reconstruction" Applied Sciences 12, no. 9: 4132. https://doi.org/10.3390/app12094132
APA StyleKong, L., Xiong, W., & Ying, S. (2022). Spatiotemporal Matching Cost Function Based on Differential Evolutionary Algorithm for Random Speckle 3D Reconstruction. Applied Sciences, 12(9), 4132. https://doi.org/10.3390/app12094132