Abstract
One of the most challenging problems during disasters involving crowds is pedestrian evacuation. It is very important in such situations to improve survival rates by getting all or most of the people out in the shortest possible time. Technological intervention through augmenting the evacuation process using an unmanned aerial vehicle (UAV) exhibits great potential in improving survival rates, but the exploration of this method is still in its infancy. Therefore, this study explores the potential of utilizing UAVs for crowd management during emergency evacuations. We conducted a rigorous study, using a simulation model featuring four UAVs and differing numbers of pedestrians, with use of two UAV guidance approaches: partial guidance and full guidance. The experimental results suggest that exploiting UAVs in crowd evacuation and following the partial guidance approach can lead to a more efficient evacuation process.
1. Introduction
As the rate of both natural and manmade disasters—fires, explosions, earthquakes, etc.—in populated areas is increasing, people are becoming more concerned about emergencies in which areas need to be evacuated promptly [1,2,3,4]. In such situations, people often panic, fearing losing their lives, and look for a quick exit to escape. The problem becomes more challenging when a large number of panicked pedestrians try to escape together, causing greater incidence of injuries and casualties. Sometimes the situation can become even worse, if the pedestrians trample each other in a stampede when they do not know where the exits are. This can lead to severe injuries and mass death. Therefore, emergency pedestrian evacuation is now considered an extremely important research problem to be solved for any crowd management process.
In this realm of research, significant effort from various fields has already been made to ameliorate the quality of crowd evacuation solutions. Nonetheless, incorporating cutting-edge technologies, such as unmanned aerial vehicles (UAVs) [1,2] remains worth exploring, given the magnitude of impact a good crowd evacuation solution has. However, the incorporation of such cutting-edge technologies in crowd evacuation solutions is still under-explored in the literature.
The existing studies on crowd evacuation cover both unguided crowd evacuation [3,4,5,6,7] and guided crowd evacuation [8,9,10,11,12,13,14,15,16,17,18]. In such studies, it has already been found that guided crowd evacuation can be expected to perform better [10,12,14]. Accordingly, guided crowd evacuation has been explored from diverse perspectives, such as single human leader [9,10], multiple human leaders [10,11,12], a single robot leader [13,14], and multiple robot leaders [15,16,17,18]. Among these studies, only a few [16,18] have concentrated on using UAVs in the evacuation process. Such studies are confined to specific tasks, such as information gathering and dissemination regarding hazards within an evacuation area [16] or the scheduling of the UAVs during evacuation [18]. However, to the best of our knowledge, none of the existing studies has focused on the aspect of different approaches to guidance when using UAVs, which can be used to guide evacuees during an evacuation process. The aspect of guidance approaches when using UAVs is of particular significance, as this can differ in real-world cases. UAVs can be used to conduct partial guidance or full guidance (these approaches will be elaborated further in Section 3) during an evacuation process. As these important factors are yet to be investigated in the literature, this paper examines the notions of crowd guidance using UAVs in depth through studying diverse scenarios.
It is also very important to explore the various options for placement of UAVs—for example, whether they should be placed at the middle of the evacuation space, near the exit, or in a random fashion – when exploring their applicability in crowd evacuation. To the best of our knowledge, this aspect is yet to be analyzed in the literature. Therefore, this study also attempts to perform rigorous analysis over diverse placements of UAVs.
It is worth mentioning that UAVs should be explored in terms of their potential to improve the efficiency of pedestrian evacuation in crowds. A UAV is an aircraft that can fly without a pilot on board [1]. It can be controlled by a remote operator or fly based on a specific program. UAVs have already been used for many applications in the context of smart cities and public safety, besides their prominent military and commercial applications [2]. However, as mentioned above, their applicability in the context of emergency pedestrian crowd evacuation from the perspectives of crowd guidance and UAV placement is yet to be explored in the literature.
Therefore, in this paper, we focus on UAV-based emergency guidance and evacuation planning to explore the applicability of UAVs in the context of emergency pedestrian guidance and the evacuation of crowds. To do so, we first propose different methodologies for UAV-augmented guidance. To evaluate the outcomes of our proposed methodologies, we built a model that can simulate pedestrian guidance and evacuation under different scenarios with regard to the number of pedestrians, the position of exits, and the positions of the UAVs.
The main contributions of this paper are:
- Two new methodologies for UAV-augmented emergency pedestrian guidance and crowd evacuation, namely, full guidance and partial guidance.
- Amodel for the proposed methodologies which simulates pedestrian evacuation under different scenarios involving diverse UAV placements.
- The evaluation of the proposed methodologies against alternative solutions in terms of two performance metrics: average evacuation time and mortality.
The remainder of this paper is organized as follows: Section 2 reviews related studies in the field of crowd evacuation; Section 3 illustrates our methodology; Section 4 reports and discusses the experimental results; and Section 5 concludes the paper and sheds some light on future research directions.
2. Related Work
Since crowd evacuation is an important problem in this century, many researchers from different fields are working on it. In this section, we review some ofthe previous studies on evacuation planning, summarized in Table 1, and classify them into two types: unguided crowd evacuation and guided crowd evacuation. The review is not meant to be comprehensive: the aim is merely to give some examples of each approach, especially with regard to guided crowd evacuation, which is our main focus.

Table 1.
Summary of literature focusing on guided and unguided crowd evacuation.
2.1. Unguided Crowd Evacuation
During unguided crowd evacuation, pedestrians direct themselves through the evacuation path and exit using signage, either static or dynamic, without the need for an external agent (e.g., human leader, mobile app, robot, UAV) to lead them. A study in this regard [3] utilized the Ant Colony Optimization algorithm (ACO) to determine a feasible route and avoid a potential obstacle. The study proposed suggesting found paths over mobile messaging or broadcasting the paths to the people under evacuation. Another study [4] focused on evacuation in a simplified scenario covering a single indoor room with one exit. In such studies, simulation tools such as Unity [5] and EXODUS [6] are generally used. Another similar study [7] used an adaptive guiding protocol based on wireless sensor networks to approach congestion problem during evacuation. None of these studies focused on the utilization of UAV for evacuation.
2.2. Guided Crowd Evacuation
In a guided evacuation, a leader or leaders (sound systems, robots, humans, etc.) guide the evacuation process. A study using such an approach [8] developed a cellular automaton crowd route choice (CACR) model with audio alarms. The study presented in [9] presented a different guided evacuation approach. However, none of these studies focused on utilization of UAV for guiding evacuees. Nonetheless, to provide a glimpse of the relevant literature, we present below related studies on guided evacuation with a single human leader, multiple human leaders, a single robot leader, and multiple robot leaders.
2.2.1. Single Human Leader
The study presented in [9] reviewed various types of guidance approach using signage, human leaders, mobile devices, robots, and wireless sensor networks, and found those involving humans to be the most efficient. Another study [10] used the social force model to study evacuation in a subway station with two exits, and concluded that using a leader accelerates the evacuation process.
2.2.2. Multiple Human Leaders
The study presented in [10] studied evacuation scenarios guided by multiple leaders, concluding that the average evacuation time was longer and the number of injuries was larger in the multiple-leader scenarios than in the traditional evacuation scenarios. In [11], the researchers modeled an indoor dance hall with two exits, represented by means ofa two-dimensional Cellular Automata model. This study suggested that having a large number of leaders can negatively impact evacuation outcomes. The study presented in [12] focused on safe navigation in a virtual environment, concluding that leader-following behavior successfully led the evacuees out to a safe point in a short time.
2.2.3. Single Robot Leader
The study presented in [13] investigated robot-guided crowd navigation in indoor environments by developing a two dimensional simulation tool called MengeRos. Another study [14], evaluated the use of a robot-guided evacuation framework in both Cellular Automata and real-world evacuation scenarios. This study concluded that the evacuation process was more efficient when using a robot in terms of evacuation time.
2.2.4. Multiple Robot Leaders
The study presented in [15] investigated a framework for using multi-cooperative robots in the evacuation of pedestrians. Another study, [16], introduced a robot-assisted crowd evacuation system to provide dynamic instructions on hazards to the crowd during the evacuation process. Even though this study revealed that using robot-assisted evacuation is beneficial in both normal and panic scenarios, this study did not focus on different approaches to guidance, such as partial guidance and full guidance. Another study [17], introduced a heuristic method to deploy evacuation robots and assign them guidance roles as either attractive or repulsive entities to humans. In [18], a UAV-based crowd evacuation was proposed. However, this study mainly focused on UAV scheduling in a polluted industrial area.
Finally, a few studies [19,20,21] have explored cooperation among multiple UAVs in a crowd evacuation scenario. The study presented in [19] used multi-UAV cooperation in the evacuation where multiple drones support disaster evacuation guidance. The UAV agent shares information about the UAVs to decide on the evacuation guidance, rerouting if the UAVs encounter any problems. The study presented in [20] generated a plan to evacuate pedestrians to the safest point and guide them using multi-UAV cooperation. The study presented in [21] provided safe evacuation guidance for when tsunamis occur using multiple UAVs. The study identified a safe route using information such as disaster situations and regional characteristics, through the cooperation of multiple UAVs.
2.3. Limitations of the Existing Literature
The existing literature has investigated different modalities of crowd evacuation involving humans and robot—both single entities and multiple ones. However, little research has been conducted on the use of UAVs as leaders for evacuation purposes. Moreover, the use of different types of guidance approach when using UAVs is yet to be covered in the literature to the best of our knowledge.
The aspect of guidance approaches is particularly important in the case of employing UAVs in evacuation situations, as UAV leader models can differ in real-world cases. The models might involve partial guidance or full guidance in an evacuation process. Nonetheless, the placement of UAVs during crowd evacuation is yet another important aspect that is under-investigated in the literature. This paper therefore examines these aspects in depth through investigating different scenarios in a rigorous manner.
3. Methodology
In this study, we used an agent-based modeling and simulation platform, NetLogo 6.1.1 [22], to model the environment and test a wide range of evacuation scenarios. The environment represented a 60 m × 60 m (3600 m2) indoor hall, as shown in Figure 1, with four exits that are 3 m wide each(white rectangles) and six randomly placed obstacles (marked in green), each representing a long pillar of1 m radius. We examined the effect of two placements of exit doors, opposite or adjacent, as shown in Figure 2, where the width of the exit doors was 3m. We considered different numbers [450, 900, 1800, 3600, and 7200] ofarbitrarily located standing pedestrians, and their walking speeds were varied depending on the crowd density (CD) [23] as shown in Table 2.
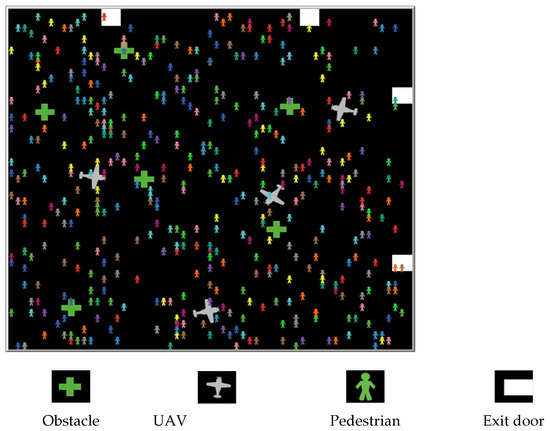
Figure 1.
Model Elements.
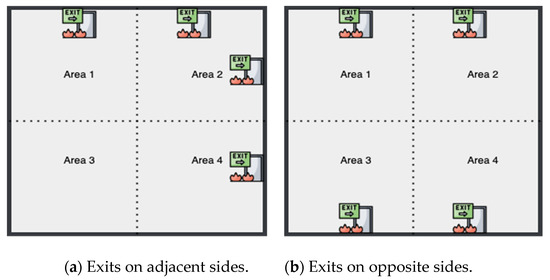
Figure 2.
Arrangements for the placement of four exits.
Table 2.
Walking speed as a function of crowd density.
For guided evacuation, we considered four battery-powered mini-multi-rotor UAVs capable of a speed of 3.5 m/s. Each UAV was equipped with a light to guide the pedestrians in case of darkness. One depot was placed next to each exit door and four other depots were distributed in the hall based on the scenario being tested. For example, if a scenario was set up to test the central position of the UAVs, then the depots were also located in the center. In this case, when the evacuation starts, a UAV flies from a central depot to a depot near the exit. We experimented with two UAV leader models:
Partial guidance: In this approach, a pedestrian immediately goes to an exit door if it is closer to them than a UAV. Otherwise, the pedestrian follows the nearest UAV, which guides them to the nearest exit. This approach can be followed when the UAVs are positioned either randomly, near an exit, or in the middle of the hall.
Full guidance: In this approach, each pedestrian follows the nearest UAV, which guides them to the nearest exit. This approach can be followed when the UAV is positioned randomly or in the middle of the hall.
In both of the above leader models, a pedestrian can take a decision simply by observing the UAV and without following any iterative or complex process. Thus, the time complexity of decision-making by a pedestrian in our methodology is O (1). We also investigated the evacuation time when following our methodology. The results on evacuation time are presented in Section 4.
To better investigate the outcomes of our methodology, we varied the initial location of the UAVs to explore different possible positions:
- Middle: All UAVs are located at the center of the hall. Once the evacuation starts, a UAV flies to the nearest exit where all (in case of full guidance) or some (in case of partial) of its nearby pedestrians follow it.
- Random: Each UAV is initially placed in an arbitrary position in each area. Once the evacuation starts, a UAV flies to a different exit where all (in case of full guidance) or some (in case of partial) of its nearby pedestrians follow it.
- Near exits: Each UAV is assigned to an exit position. Once the evacuation starts, a UAV directs its nearby pedestrians to that exit.
The different settings of all considered variables are summarized in Table 3.
Table 3.
Simulation parameters and assigned values.
In [24] the average time of the evacuation process was examined, and it was found that 15 min is a reasonable time between the instant that pedestrians are made aware of an emergency and their arrival ata safe location. Therefore, in our experiments, we limited the evacuation time to15 min in both partial and full guidance models.
Two performance metrics were used to test the effectiveness of the two UAV guidance approaches:
- Average evacuation time (AET): the average time each evacuee takesto reach the designated exit.
- Mortality: the number of deaths that occur in the evacuation process.
4. Results and Discussion
This section presents and discusses the effect of using UAVs in the evacuation process, presenting measurements of the average evacuation time and mortality resulting from the use of partial and full guidance models with different crowd densities. When the hall is partially full, CD ≤ 0.5; when the hall is full, CD = 1; and when the hall is crowded, CD = 2; the speed of pedestrians in our model was varied accordingly. In addition, we examined two positions for the exit doors (opposite and adjacent), and three positions of UAVs (middle, random, and near exit) with partial guidance, and two positions of UAVs (middle and random) with full guidance.
4.1. Partial Guidance
In the partial guidance model, pedestrians near an exit move immediately to the exit door, while other pedestrians follow the nearest UAV, which guides them to the nearest exit. The results for AET and mortality for partial guidance models are presented below.
- (a)
- Average Evacuation Time
In Figure 3, the average evacuation time is plotted against different UAV locations as the number of pedestrians increases from 450 to 7200 for opposite and adjacent exit doors. AET is calculated as the average time taken by each evacuee. The results show that AET was highest when the evacuation process ran without UAVs (None); it was around 9 min when CD = 0.5; and it increased slightly, reaching 10 min, when CD = 2 for both placements of exit doors.
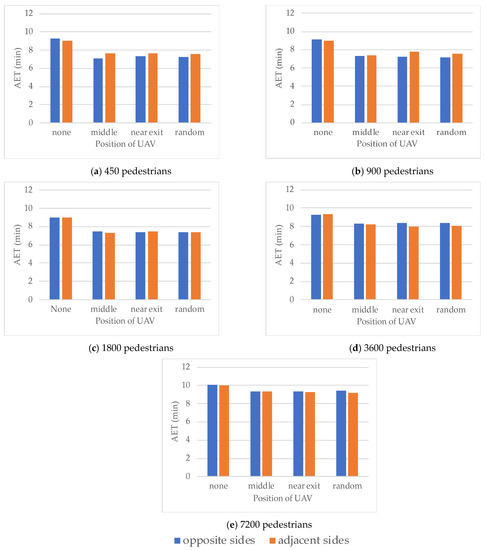
Figure 3.
Average evacuation time for partial guidance model.
On the other hand, using UAVs in the evacuation process led to a decrease in AET. For instance, when CD ≤ 0.5, AET was less than 8 min; it increased slightly to just above 8 min when CD = 1 for all three UAV positions and both placements of exit doors. When the hall was crowded, that is, where two people were located within one meter of each other, AET increased to around 9 min. In all tested situations involving the partial guidance model, the two placements of the four exit doors (opposite or adjacent)had no significant effect on the AET.
- (b)
- Mortality
The second performance measure was percentage mortality, which examined the efficiency of the suggested evacuation approach. In Figure 4, the percentage mortality is plotted for different UAV locations as the number of pedestrians increases from 450 to 7200 for opposite and adjacent exit doors. When the evacuation process was run without utilizing UAVs, the percentage mortality was worst, especially with adjacent exit doors: approximately 30% when CD = 0.5, and rising to above 60% when CD = 2. For exit doors placed opposite each other, the mortality percentage was better with low crowd density, and increasing considerably, to more than 60%, when CD = 2.
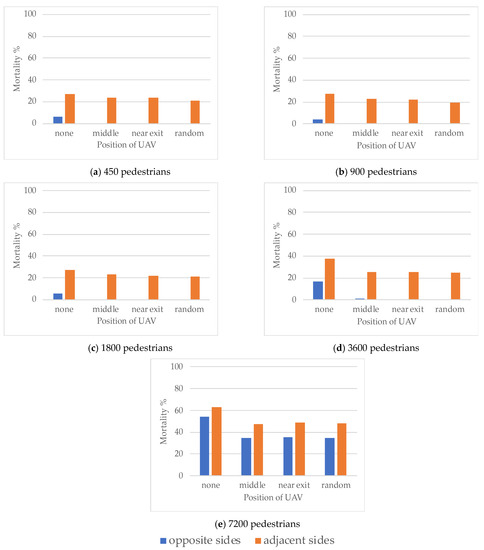
Figure 4.
Mortality for partial guidance model.
Using UAVs in all three different positions (middle, near exit, and random) to guide pedestrians to the nearest exit show low mortality percentage when compared with a None approach. With opposite exit doors, the mortality percentage was around 0%, even when the hall is full (CD = 1), rising to around 20% with adjacent exit doors regardless of the position of UAV. Having a crowded hall with CD = 2, the mortality percentage was around 35%, but it increased to more than 40% when the exit doors were adjacent.
Overall, these results clearly show that adopting UAVs in the evacuation process leads to a more efficient evacuation process compared with using none, as it reduces AET and mortality regardless of the location of UAVs and exit doors. The two placements of exit doors gave similar results in terms of AET, but the mortality rate decreased considerably when the exit doors were opposite each other for all three UAV positions.
4.2. Full Guidance
In this approach, UAVs are the only guidance during the evacuation, where each pedestrian follows the nearest UAV to guide them to the nearest exit. The results of AET and mortality for full guidance models are as follows:
- (a)
- Average Evacuation Time
Figure 5 illustrates the AET results in two different UAV positions: middle and random. The lowest AET was with random UAVs, and where exit doors were opposite—a scenario which slightly outperformed adjacent exit doors. For opposite exit doors, when CD ≤ 0.5, AET was around 7 min, reaching 10 min when CD = 2. Placing UAVs in the middle of the hall with opposite or adjacent exit doors led to a high AET of approximately 11 min when CD = 2. Compared with the no-UAV approach, adopting UAVs randomly in the hall to provide full guidance in the evacuation process gave better AET outcomes.
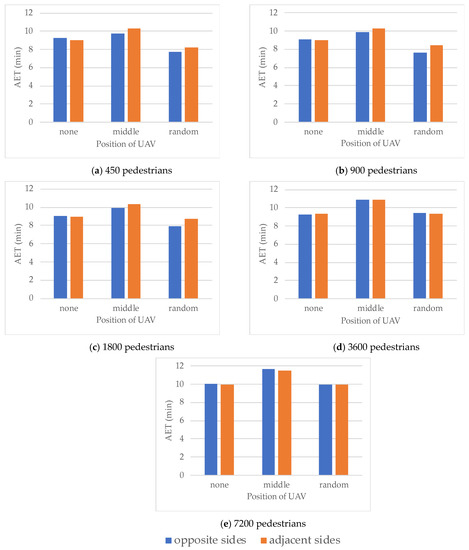
Figure 5.
Average evacuation time for full guidance model.
In the full guidance model, since pedestrians follow the UAV to guide them instead of moving directly to the nearest exit, the results show a higher AET compared to analogous situations in the partial guidance approach.
- (b)
- Mortality
Figure 6 demonstrates the mortality rate when the evacuation process depends on UAVs as the main form of guidance for all pedestrians. In general, as with the results obtained for the partial guidance model, the positioning of exit doors opposite each other led to lower mortality compared with the adjacent exit doors. Comparing the no-UAVapproach with the full guidance model, it was found that placing UAVs in the middle, along with exit doors in opposite positions decreased the mortality to approximately 0%, even when the hall was full (CD = 1); however, mortality exceeded 20% with adjacent exit doors.
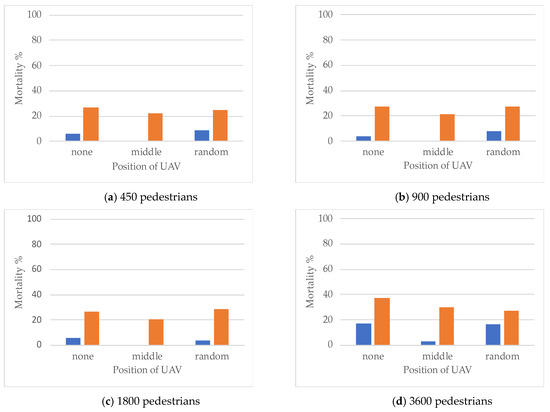
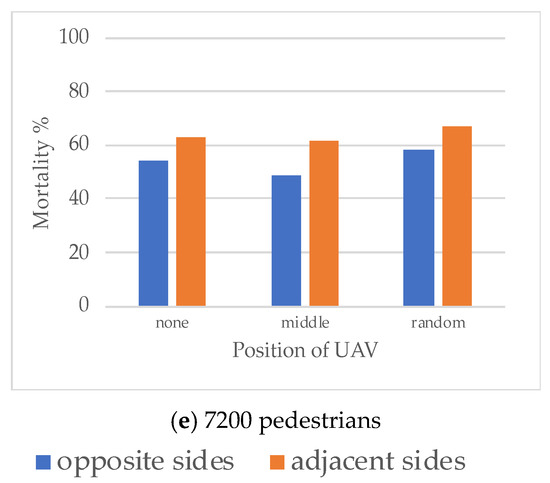
Figure 6.
Mortality for full guidance model.
Overall, using the full guidance approach was found to enhance the evacuation process, as evidenced by reduced AET and mortality rates. Although placing UAVs in the middle of the space with opposite exit doors led to high AET, the mortality percentage was still the lowest compared with using randomly placed or no UAVs. Table 4 summarizes the results of all experiments conducted on the partial and full guidance models.
Table 4.
Summary of results.
4.3. Comparison with Existing Research
We compared outcomes of our simulation with those of existing research studies. To do so, we performed a qualitative comparison. In the comparison, we considered different aspects such as exits, evacuation time, mortality rate, and scaling up (in terms of the number of pedestrians). We compared our results with the most relevant research studies, presented in [16,18,21].
Table 5 presents outcomes of the qualitative comparison. It shows variations in the focus and simulation approach/tool adopted by the studies under consideration. The table shows that our study explored greater variation in exit positions, and that our approach generated greater improvements in both evacuation time and mortality rate. Our study also demonstrates better scaling up of the results compared to the others. Thus, our study presents more comprehensive and convincing results than those reported by the others.
Table 5.
Qualitative comparison of our proposed methodology with other existing research.
5. Conclusions and Future Work
This paper suggests a simulation model to show the potential of utilizing UAVs in crowd management during emergency evacuations, with two UAV guidance approaches: partial guidance and full guidance. We examined the effect of two different placements of exit doors (opposite and adjacent) and three UAV positions (middle, near exit, and random) for the partial guidance model, and two UAV positions (middle, and random) for the two exit positions for the full guidance model, testing the efficacy of the various scenarios in the evacuation of an indoor hall. The simulations were performed with low and high crowd densities, which affected the pedestrians’ walking speeds accordingly.
The performance of the models was measured according to the average evacuation time and mortality rate. The results showed the superiority of the partial guidance model with opposite exit doors, regardless of the position of the UAVs: this scenario significantly decreased the mortality rate and produced a remarkably low average evacuation time when compared to other approaches.
The results presented herein open a path toward research on various possibilities to improve emergency planning for UAV-controlled crowd evacuations. Future studies might examine different shapes and sizes of indoor hall, with different numbers of obstacles, exit doors, and UAVs. In addition, the simulation could be extended by considering various characteristics that affect pedestrians’ walking speed, such as age, gender, and medical condition.
Author Contributions
Methodology, A.A. (Afnan Alhindi), D.A., A.A. (Aziza Alsubki) and R.A.; software, A.A. (Afnan Alhindi), D.A., A.A. (Aziza Alsubki) and R.A.; validation, A.A. (Afnan Alhindi), H.K.; formal analysis, A.A. (Afnan Alhindi), H.K., N.A.N. and A.B.M.A.A.I.; investigation, A.A. (Afnan Alhindi), N.A.N. and A.B.M.A.A.I.; writing—original draft preparation, D.A., A.A. (Aziza Alsubki) and R.A.; writing—review and editing, A.A. (Afnan Alhindi), H.K., N.A.N. and A.B.M.A.A.I.; visualization, A.A. (Afnan Alhindi); supervision, H.K. All authors have read and agreed to the published version of the manuscript.
Funding
This work is supported by the Deputyship for Research & Innovation, Ministry of Education in Saudi Arabia through the project number (DRI-KSU-762).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Acknowledgments
The authors extend their appreciation to the Deputyship for Research & Innovation, Ministry of Education in Saudi Arabia for funding this research work.
Conflicts of Interest
The authors declare no conflict of interest associated with this paper.
References
- Helbing, D.; Ammoser, H.; Kühnert, C. Disasters as extreme events and the importance of network interactions for disaster response management. In Extreme Events in Nature and Society; Springer: Berlin/Heidelberg, Germany, 2006; pp. 319–348. [Google Scholar]
- Restas, A. Drone Applications for Supporting Disaster Management. World J. Eng. Technol. 2015, 3, 316–321. [Google Scholar] [CrossRef] [Green Version]
- Huang, Z.M.; Chen, W.N.; Li, Q.; Luo, X.N.; Yuan, H.Q.; Zhang, J. Ant Colony Evacuation Planner: An Ant Colony System with Incremental Flow Assignment for Multipath Crowd Evacuation. IEEE Trans. Cybern. 2020, 1–14. [Google Scholar] [CrossRef]
- Chiu, Y.-P.; Shiau, Y.-C.; Lai, Y.-H. Study on evacuation simulation under crowd-diversion condition. Adv. Mech. Eng. 2018, 10, 10. [Google Scholar] [CrossRef]
- “Unity”. Available online: https://unity.com/ (accessed on 9 August 2021).
- “Exodus Introduction”. Available online: http://fseg.gre.ac.uk/exodus/index.html (accessed on 9 August 2021).
- Lin, C.H.; Chen, P.Y.; Chen, W.T. An adaptive guiding protocol for crowd evacuation based on wireless sensor networks. In Proceedings of the IEEE Vehicular Technology Conference, Dresden, Germany, 2–5 June 2013. [Google Scholar]
- Wu, Y.; Kang, J.; Wang, C. A crowd route choice evacuation model in large indoor building spaces. Front. Archit. Res. 2018, 7, 135–150. [Google Scholar] [CrossRef]
- Zhou, M.; Dong, H.; Ioannou, P.A.; Zhao, Y.; Wang, F.Y. Guided crowd evacuation: Approaches and challenges. IEEE CAA J. Autom. Sin. 2019, 6, 1081–1094. [Google Scholar] [CrossRef]
- Dong, H.; Gao, X.; Gao, T.; Sun, X.; Wang, Q. Crowd evacuation optimization by leader-follower model. In IFAC Proceedings Volumes (IFAC-PapersOnline); IFAC Secretariat: Laxenburg, Austria, 2014; Volume 19, pp. 12116–12121. [Google Scholar]
- Ji, Q.; Gao, C. Simulating Crowd Evacuation with a Leader-Follower Model. IJCSES Int. J. Comput. Sci. Eng. Syst. 2007, 1, 249–252. [Google Scholar]
- Fachri, M.; Juniastuti, S.; Nugroho, S.M.S.; Hariadi, M. Crowd evacuation using multi-agent system with leader-following behaviour. In Proceedings of the 2017 4th International Conference on New Media Studies, CONMEDIA 2017, Yogyakarta, Indonesia, 8–10 November 2017; Volume 2018, pp. 92–97. [Google Scholar]
- Aroor, A.; Epstein, S.L.; Korpan, R. MengeROS: A Crowd Simulation Tool for Autonomous Robot Navigation. In AAAI Fall Symposium—Technical Report; AAAI Publications: Palo Alto, CA, USA, 2018; Volume FS-17-01-FS-17-05, pp. 123–125. [Google Scholar]
- Shakeel, A.; Begum, Y. Crowd Evacuation During Crisis Guided by Robot. Int. J. Sci. Eng. Technol. Res. 2017, 6, 1515–1521. [Google Scholar]
- Zhang, S.; Guo, Y. Distributed Multi-Robot Evacuation Incorporating Human Behavior. Asian J. Control. 2015, 17, 34–44. [Google Scholar] [CrossRef]
- Sakour, I.; Hu, H. Robot assisted evacuation simulation. In Proceedings of the 2016 8th Computer Science and Electronic Engineering Conference, CEEC 2016—Conference Proceedings, Colchester, UK, 28–30 September 2017; pp. 112–117. [Google Scholar]
- Liu, Z.; Wu, B.; Lin, H. Coordinated Robot-Assisted Human Crowd Evacuation. In Proceedings of the IEEE Conference on Decision and Control, Miami, FL, USA, 17–19 December 2019; Volume 2018, pp. 4481–4486. [Google Scholar]
- Xiong, M.; Zeng, D.; Yao, H.; Li, Y. A crowd simulation based UAV control architecture for industrial disaster evacuation. In Proceedings of the IEEE Vehicular Technology Conference, Nanjing, China, 15–18 May 2016; Volume 2016. [Google Scholar]
- Katayama, K.; Takahashi, H.; Yokota, N.; Sugiyasu, K.; Kinoshita, T. Design and Implementation of Multiagent-based Evacuation Guidance Support System using UAVs. In Proceedings of the 2018 9th International Conference on Awareness Science and Technology (iCAST), Fukuoka, Japan, 19–21 September 2018; pp. 196–201. [Google Scholar]
- Katayama, K.; Takahashi, H.; Yokota, N.; Sugiyasu, K.; Kinoshita, T. Cooperation scheme of multi-UAVs for evacuation guidance support. In Proceedings of the 2018 IEEE 7th Global Conference on Consumer Electronics (GCCE), Nara, Japan, 9–12 October 2018; pp. 221–222. [Google Scholar]
- Katayama, K.; Takahashi, H.; Yokota, N.; Sugiyasu, K.; Kitagata, G.; Kinoshita, T. An Effective Multi-UAVs-based Evacuation Guidance Support for Disaster Risk Reduction. In Proceedings of the 2019 IEEE International Conference on Big Data and Smart Computing (BigComp), Kyoto, Japan, 27 February–2 March 2019; pp. 1–6. [Google Scholar]
- “NetLogo Home Page”. Available online: http://ccl.northwestern.edu/netlogo/ (accessed on 9 August 2021).
- Kim, H.; Han, J.; Han, S. Analysis of evacuation simulation considering crowd density and the effect of a fallen person. J. Ambient. Intell.Hum. Comput. 2019, 10, 4869–4879. [Google Scholar] [CrossRef]
- Zhou, J.; Guo, Y.; Dong, S.; Zhang, M.; Mao, T. Simulation of pedestrian evacuation route choice using social force model in large-scale public space: Comparison of five evacuation strategies. PLoS ONE 2019, 14, e0221872. [Google Scholar] [CrossRef] [PubMed]
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).