Rule-Based Scan-to-BIM Mapping Pipeline in the Plumbing System




Abstract
1. Introduction
2. Related Works
3. Scan-to-BIM Mapping Scenario Analysis
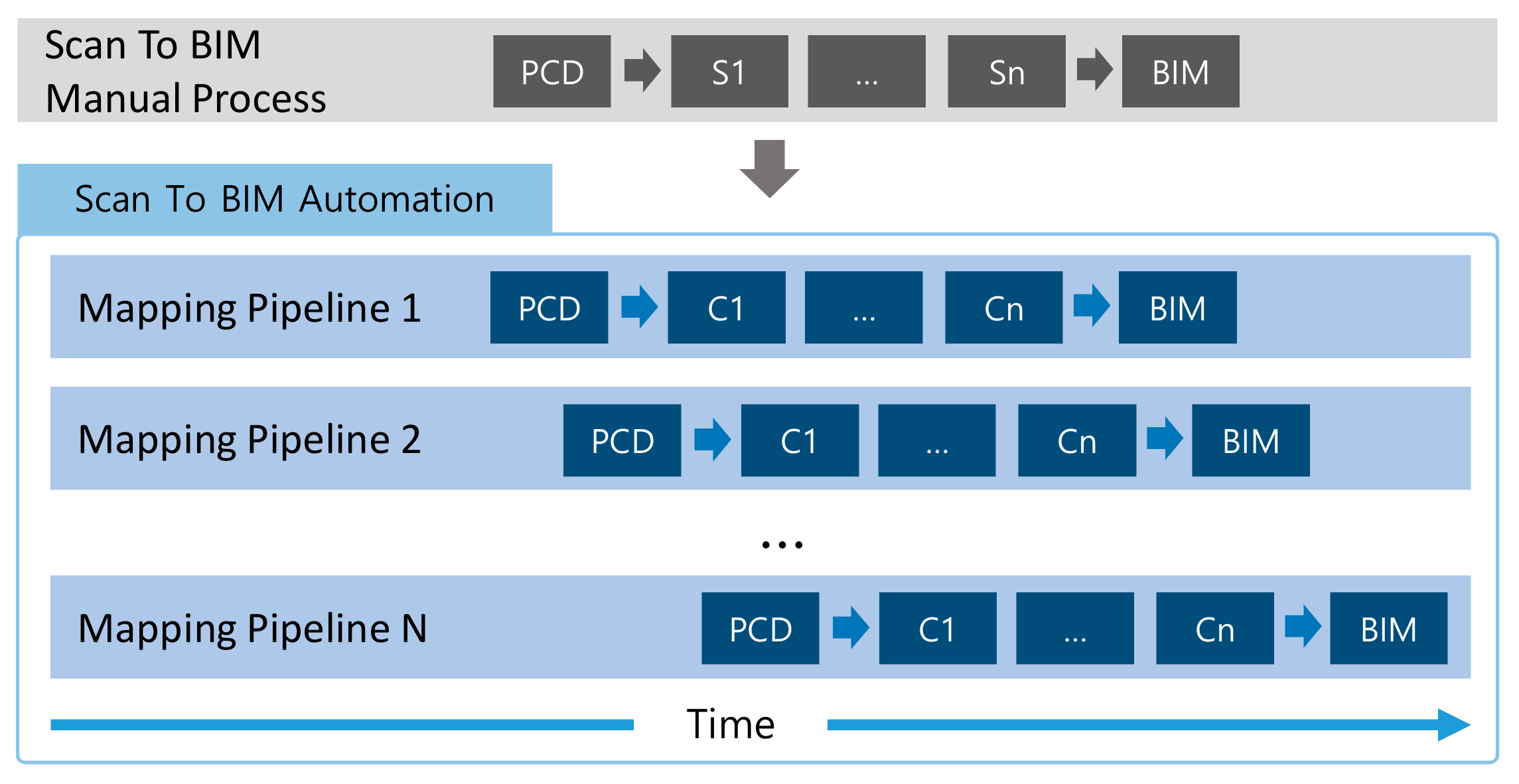
3.1. Pipeline Concept
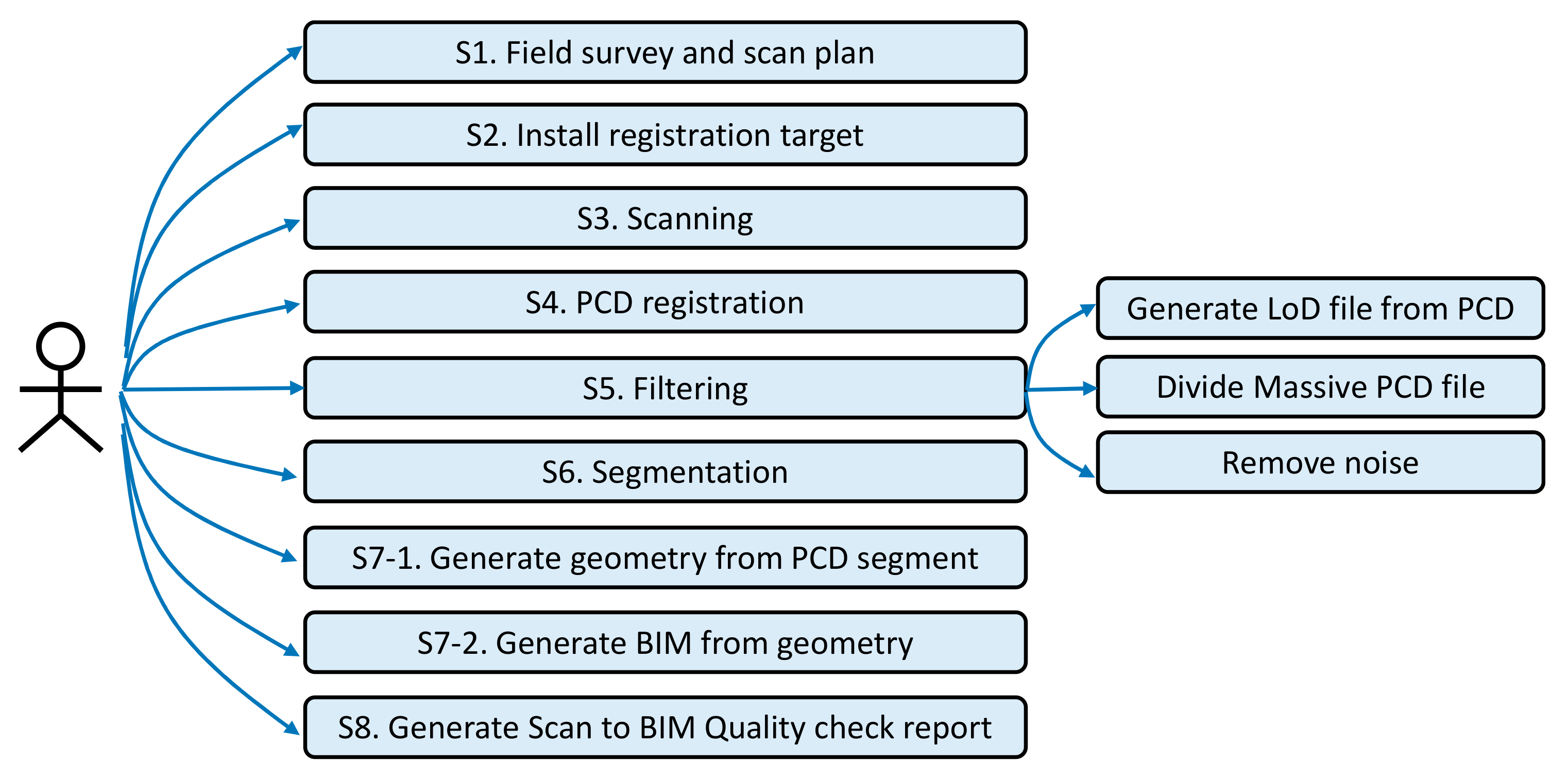
3.2. Use-Case Scenario Analysis
- S1. Field trip and planning
- S2. Target installation for matching
- S3. Field scanning
- S4. Data matching
- S5. Filtering
- S6. Segmentation
- S7. Modelling
- S8. Scan-to-BIM Quality Check Report
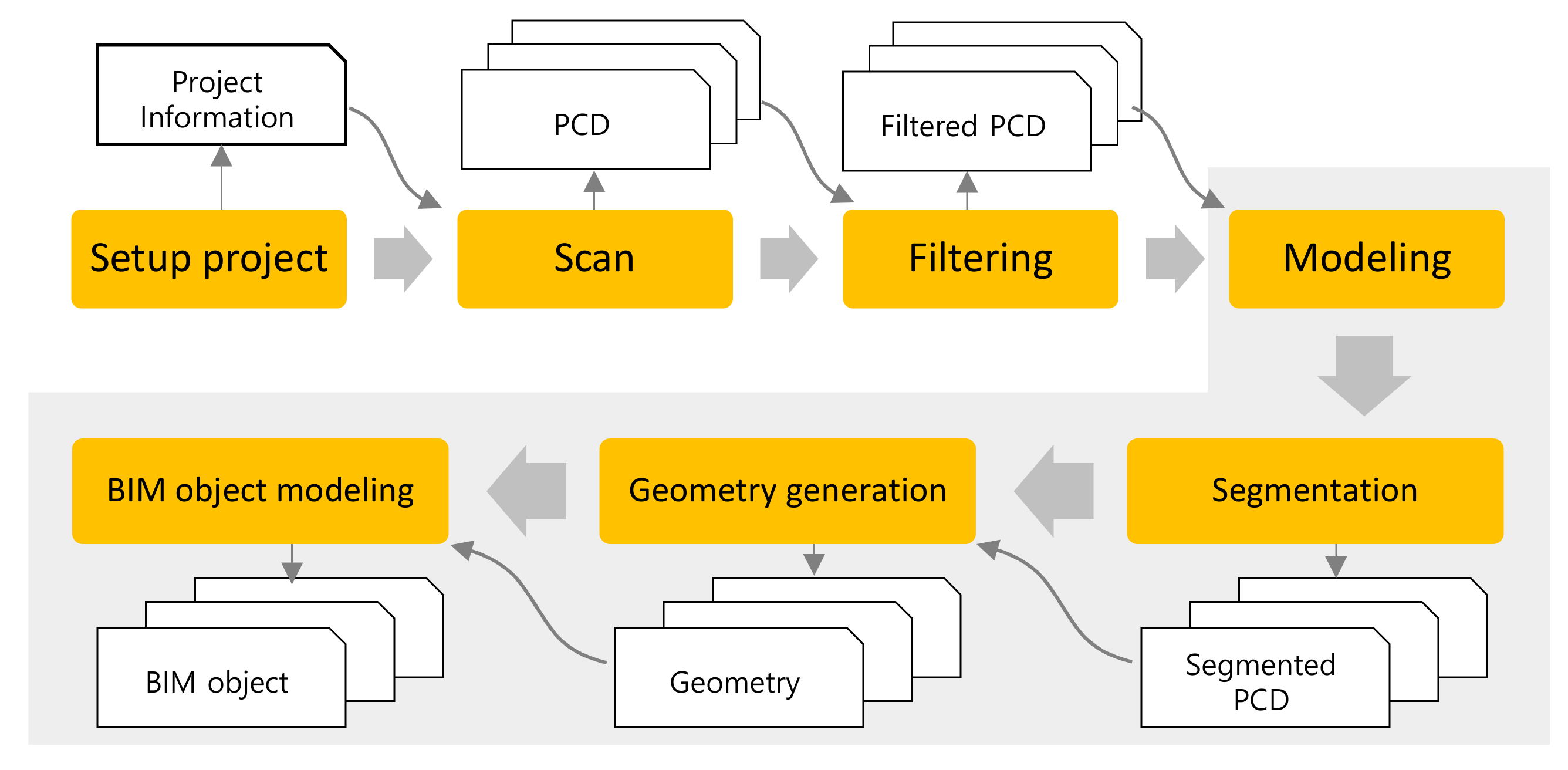
3.3. Pipeline Component Design and Input/Output Data Normalization
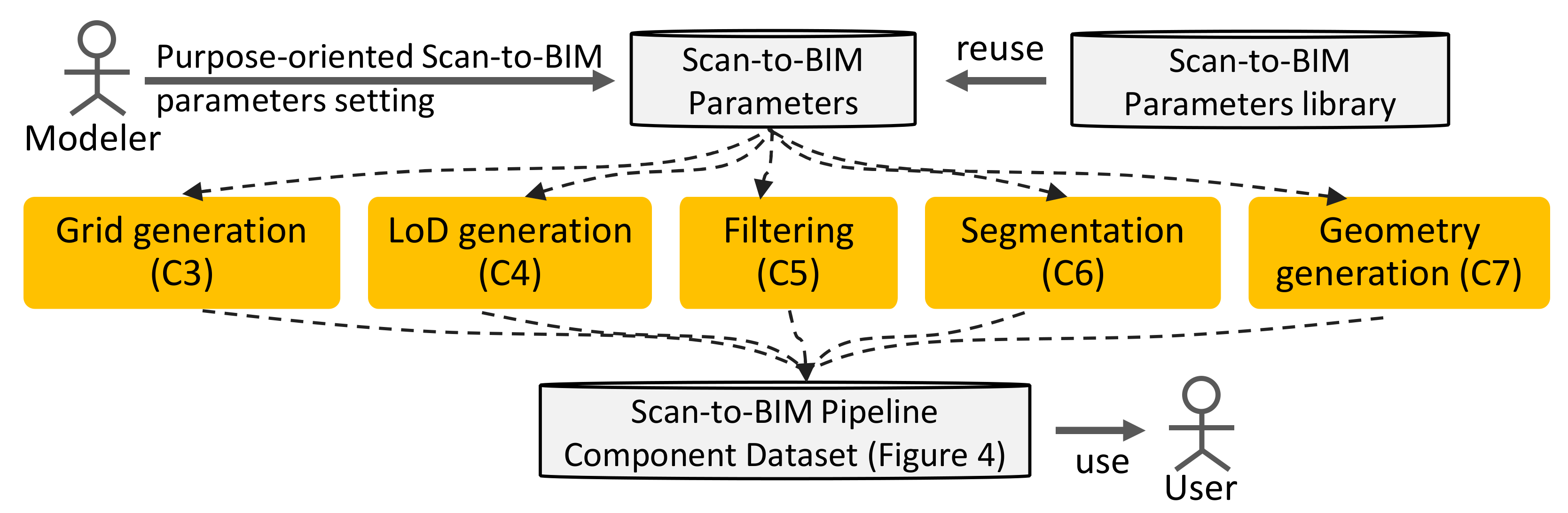
4. Pipeline Component Parameter and Rule Design
4.1. Scan-to-BIM Component Algorithm and Parameters
4.1.1. Grid Generation(C3), LoD(C4) Parameters
4.1.2. Filtering(C5) Parameters
4.1.3. Segmentation(C6), Geometry Generation(C7) Parameters
- C1.
- C2.
- C3.
- C4.
- C5.
- C6.
- C7.
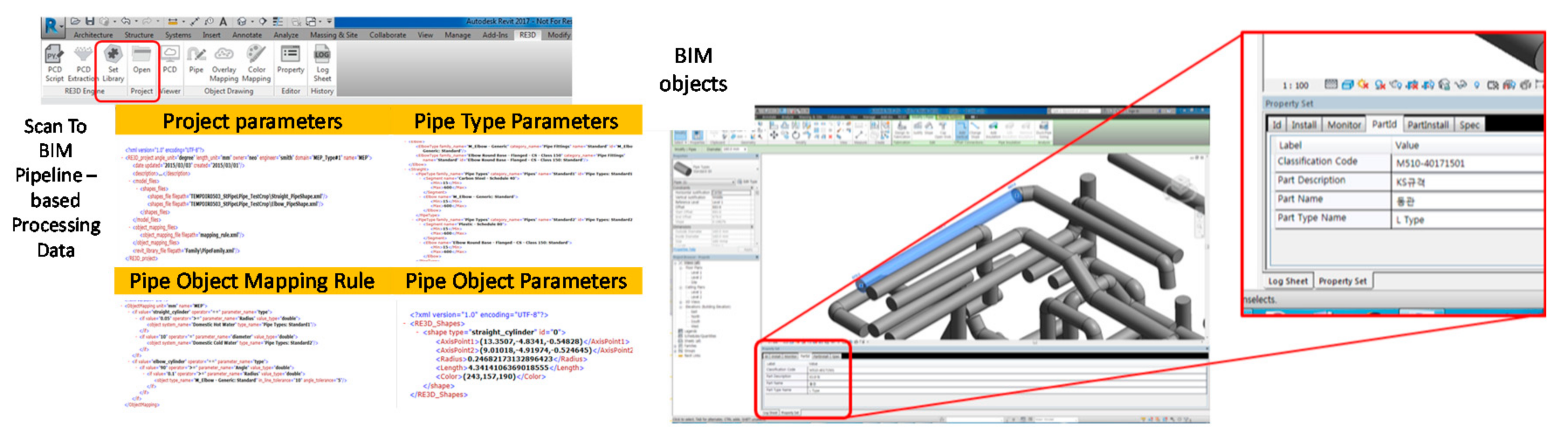
4.2. BIM Object Generation and Mapping Rule
5. Scan-to-BIM Mapping Pipeline Component Design
5.1. Pipeline Structure Requirement
- R1. Scan-to-BIM pipeline components have independent input/output structures.
- R2. The input/output formats of the Scan-to-BIM pipeline components are compatible with each other.
- R3. It supports a combination of Scan-to-BIM pipeline workflow.
- R4. It supports parallel processing of the Scan-to-BIM pipeline workflow.
- R5. It supports large-scale Scan Data Processing.
- R6. Supports parameter variability when executing Scan-to-BIM pipeline components.
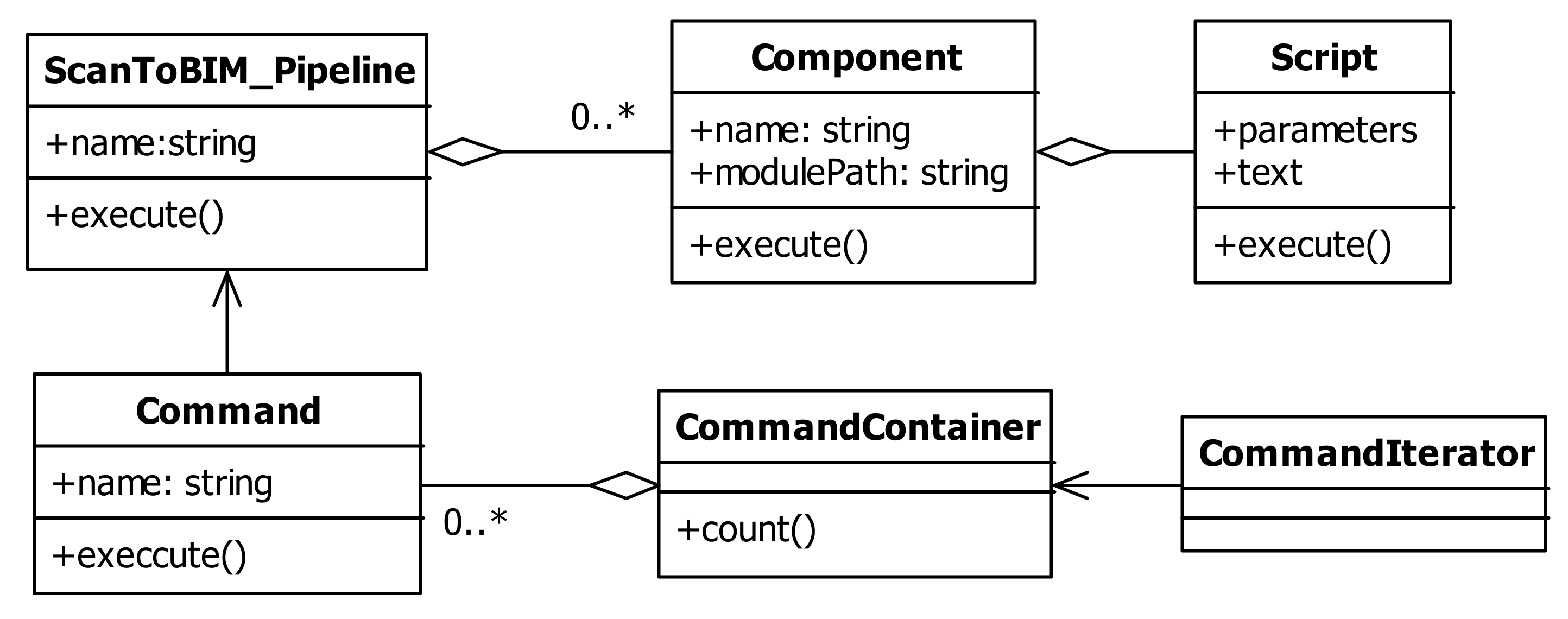
5.2. Pipeline Structure Design
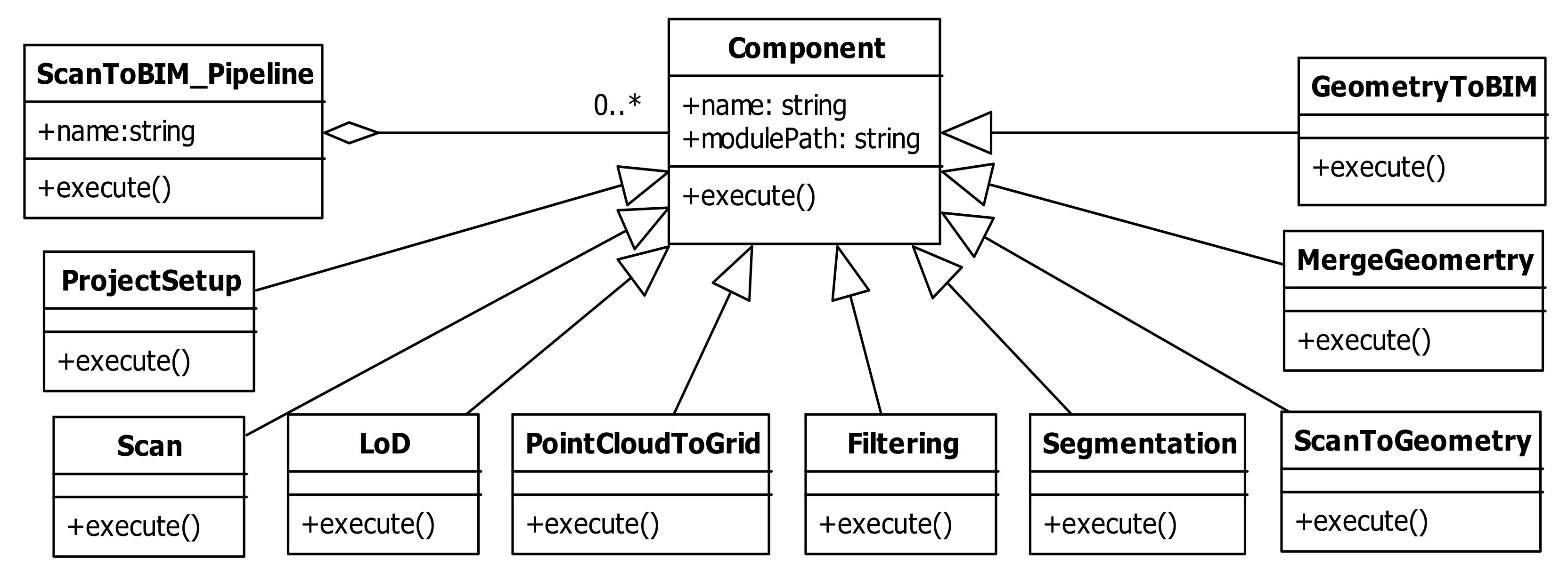
5.3. Pipeline Component Definition
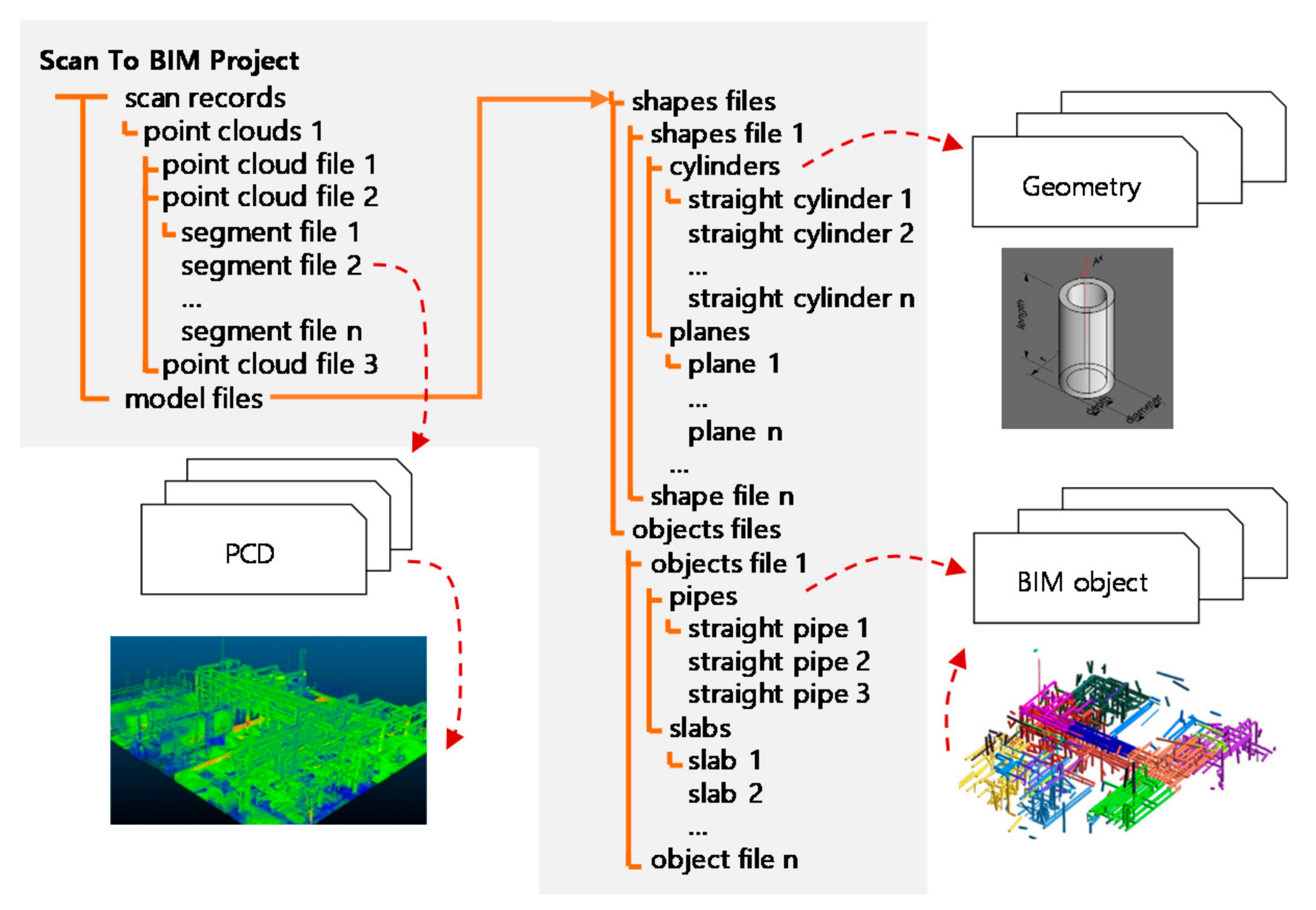
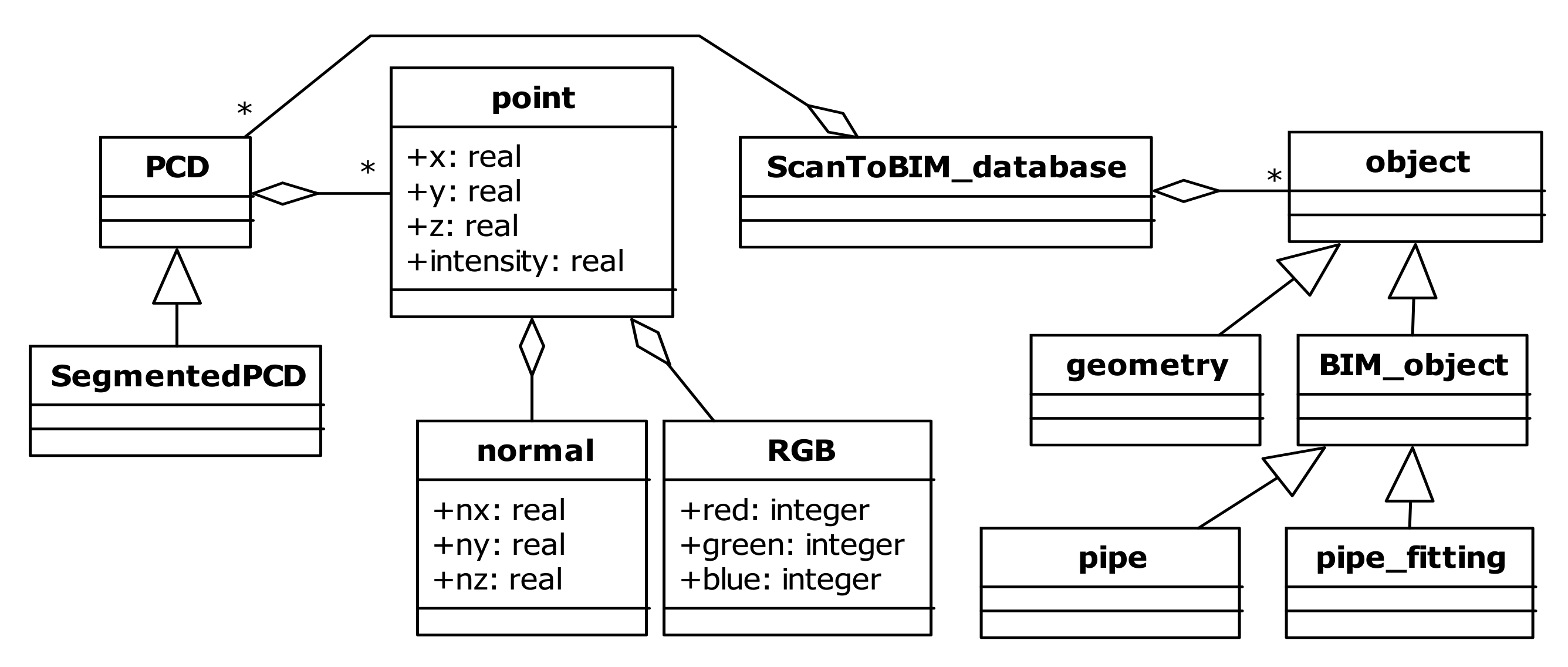
5.4. Scan-to-BIM Data Structure
6. Case Study and Performance Analysis
6.1. Massive PCD Processing Pipeline Performance Test
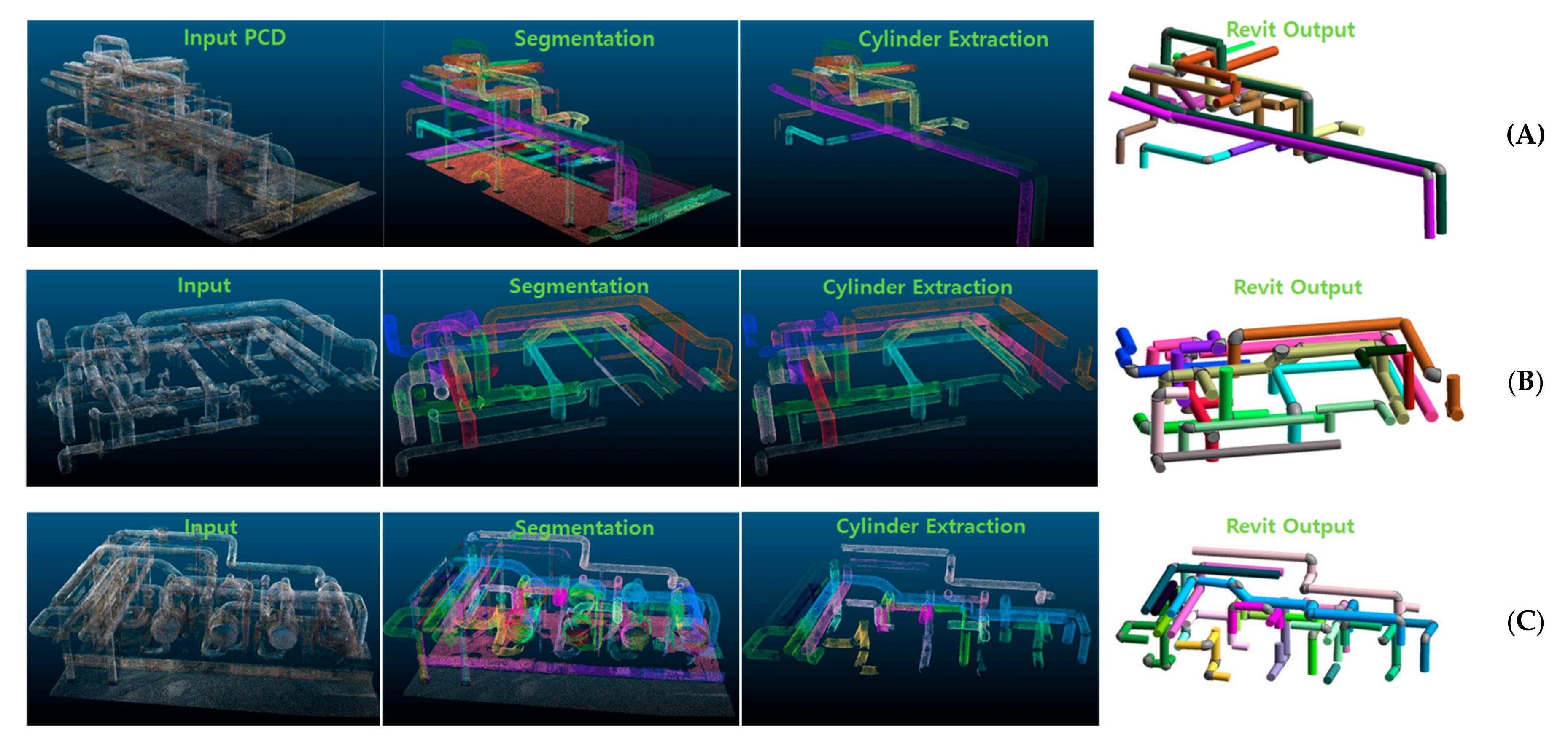
6.2. Pipe Object Mapping Pipeline Performance Test in Imperfect PCD
6.2.1. Outdoor Plant Data Test Acquired by Drone Photogrammetry
6.2.2. Testing of Indoor MEP Facility Data Acquired with LiDAR
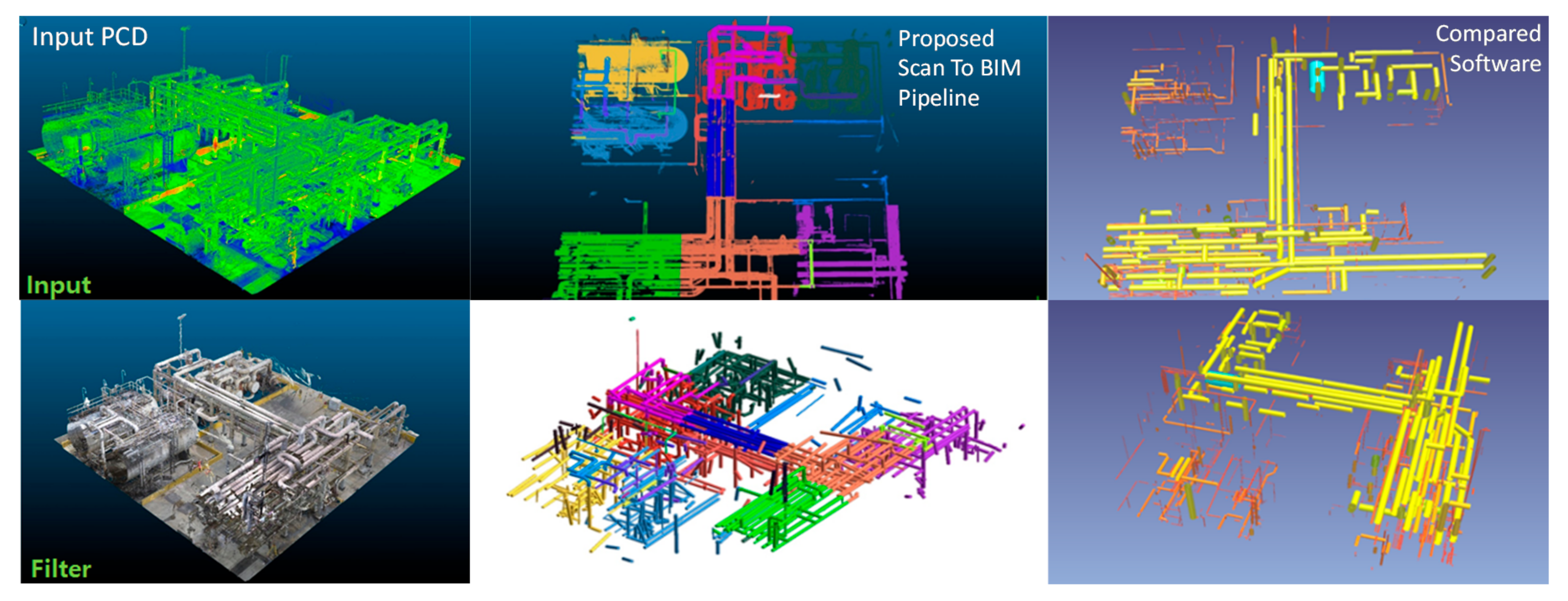
6.2.3. Pipe Object Mapping Pipeline Performance Test in Massive PCD
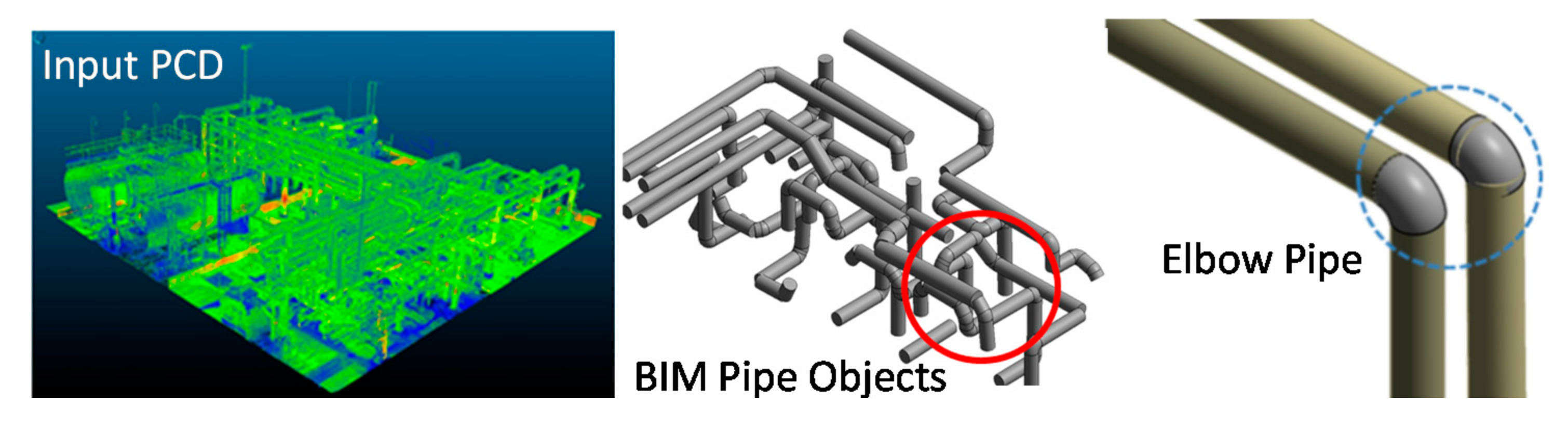
6.2.4. Non-linear Elbow Pipe Mapping Performance Test
6.3. BIM Object Mapping Test
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Xiao, Y.-Q.; Li, S.-W.; Hu, Z.-Z. Automatically Generating a MEP Logic Chain from Building Information Models with Identification Rules. Appl. Sci. 2019, 9, 2204. [Google Scholar] [CrossRef]
- Chen, J.; Kira, Z.; Cho, Y.K. Deep Learning Approach to Point Cloud Scene Understanding for Automated Scan to 3D Reconstruction. J. Comput. Civ. Eng. 2019, 33, 04019027. [Google Scholar] [CrossRef]
- Sanhudo, L.; Ramos, N.M.; Martins, J.P.; Almeida, R.M.; Barreira, E.; Simões, M.L.; Cardoso, V. A framework for in-situ geometric data acquisition using laser scanning for BIM modelling. J. Build. Eng. 2020, 28, 101073. [Google Scholar] [CrossRef]
- Stojanovic, V.; Trapp, M.; Richter, R.; Döllner, J. A Service Oriented Indoor Point Cloud Processing. In Proceedings of the International Archives of the Photogrammetry, Remote Sensing & Spatial Information Sciences, Strasbourg, France, 2–3 December 2019. [Google Scholar]
- Pepe, M.; Costantino, D.; Garofalo, A.R. An Efficient Pipeline to Obtain 3D Model for HBIM and Structural Analysis Purposes from 3D Point Clouds. Appl. Sci. 2020, 10, 1235. [Google Scholar] [CrossRef]
- Wang, Q.; Guo, J.; Kim, M.-K. An Application Oriented Scan-to-BIM Framework. Remote Sens. 2019, 11, 365. [Google Scholar] [CrossRef]
- Leite, F. Automated Approaches Towards BIM-Based Intelligent Decision Support in Design, Construction, and Facility Operations. In Lecture Notes in Computer Science; Workshop of the European Group for Intelligent Computing in Engineering; Springer: Lausanne, Switzerland, 2018; pp. 276–286. [Google Scholar]
- Bassier, M.; Vergauwen, M.; Van Genechten, B. Automated Semantic Labelling of 3D Vector Models for Scan-to-BIM. In Proceedings of the Annual International Conference on Architecture and Civil Engineering (ACE 2016), Singapore, 25–26 April 2016; pp. 93–100. [Google Scholar]
- Pučko, Z.; Šuman, N.; Rebolj, D. Automated continuous construction progress monitoring using multiple workplace real time 3D scans. Adv. Eng. Inform. 2018, 38, 27–40. [Google Scholar] [CrossRef]
- Biswas, H.K. Automatic Planning for Scanning: Optimizing 3D Laser Scanning Operations Using BIM and TLS. IAENG Int. J. Comput. Sci. 2019, 46, 1–9. [Google Scholar]
- Wang, Q.; Cheng, J.C.P.; Sohn, H. Automatic Reconstruction of As-built BIM from Laser Scanned Data of Precast Concrete Elements for Dimensional Quality Assessment. In Proceedings of the 33rd International Symposium on Automation and Robotics in Construction (ISARC), Auburn, AL, USA, 18–21 July 2016; pp. 114–122. [Google Scholar]
- Yin, C.; Wang, B.; Cheng, J.C.P. Deep Learning-based Scan-to-BIM Framework for Complex MEP Scene using Laser Scanning Data. In Proceedings of the 4th International Conference on Civil and Building Engineering Informatics (ICCBEI), Miyagi, Japan, 7–8 November 2019. [Google Scholar]
- Guo, J.; Wang, Q. Dimensional Quality Inspection of Prefabricated MEP Modules with 3D Laser Scanning. In Computing in Civil Engineering 2019; American Society of Civil Engineers: Atlanta, GA, USA, 2019; pp. 171–177. [Google Scholar]
- Ham, N.; Lee, S.-H. Empirical Study on Structural Safety Diagnosis of Large-Scale Civil Infrastructure Using Laser Scanning and BIM. Sustainability 2018, 10, 4024. [Google Scholar] [CrossRef]
- Guo, J.; Wang, Q.; Park, J.-H. Geometric quality inspection of prefabricated MEP modules with 3D laser scanning. Autom. Constr. 2020, 111, 103053. [Google Scholar] [CrossRef]
- Wang, K.; Cheng, J.C. Integrating Hardware-In-the-Loop Simulation and BIM for Planning UAV-based As-built MEP Inspection with Deep Learning Techniques. In Proceedings of the 36th International Symposium on Automation and Robotics in Construction (ISARC), Edmonton, AB, Canada, 21–24 May 2019; pp. 310–316. [Google Scholar]
- Alizadehsalehi, S.; Yitmen, I. Modeling and analysis of the impact of BIM-based field data capturing technologies on automated construction progress monitoring. Int. J. Civ. Eng. 2018, 16, 1669–1685. [Google Scholar] [CrossRef]
- García, O.F.; Diaz-Severiano, J.A.; Gomez-Jauregui, V.; Del Val, C.M.; Iglesias, J.L.; Royano, A.P.; González, C.O. Modelling As-Built MEP Facilities in a BIM Environment. In Proceedings of the Lecture Notes in Mechanical Engineering, Logroño, Spain, 20–21 June 2020; pp. 491–498. [Google Scholar]
- Kang, T.; Gwon, B. Performance evaluation of automated 3D image-scan-based reverse engineering in architectural MEP pipe object modeling. Spat. Inf. Res. 2016, 24, 701–708. [Google Scholar] [CrossRef]
- Rebolj, D.; Pučko, Z.; Babič, N.Č.; Bizjak, M.; Mongus, D. Point cloud quality requirements for Scan-vs-BIM based automated construction progress monitoring. Autom. Constr. 2017, 84, 323–334. [Google Scholar] [CrossRef]
- Chen, J.; Cho, Y.K. Point-to-point Comparison Method for Automated Scan-vs-bim Deviation Detection. In Proceedings of the 2018 17th International Conference on Computing in Civil and Building Engineering, Tampere, Finland, 5–7 June 2018. [Google Scholar]
- Iglesias, J.L.; Severiano, J.A.D.; Amorocho, P.E.L.; Del Val, C.M.; Gomez-Jauregui, V.; García, O.F.; Royano, A.P.; González, C.O. Revision of Automation Methods for Scan to BIM. In Proceedings of the Lecture Notes in Mechanical Engineering, Logroño, Spain, 20–21 June 2020; pp. 482–490. [Google Scholar]
- Díaz-Vilariño, L.; Frías, E.; Balado, J.; González-Jorge, H. Scan planning and route optimization for control of execution of as-designed bim. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 42, 143–148. [Google Scholar] [CrossRef]
- Adán, A.; Quintana, B.; Prieto, S.A.; Bosché, F. Scan-to-BIM for ‘secondary’ building components. Adv. Eng. Inform. 2018, 37, 119–138. [Google Scholar] [CrossRef]
- Badenko, V.; Fedotov, A.; Zotov, D.; Lytkin, S.; Volgin, D.; Garg, R.D.; Liu, M. Scan-to-BIM Methodology Adapted for Different Application. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 1–7. [Google Scholar] [CrossRef]
- Capone, M.; Lanzara, E. Scan-to-BIM vs. 3D Ideal Model HBIM: Parametric Tools to Study Domes Geometry. ISPRS Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 42, 219–226. [Google Scholar] [CrossRef]
- Werbrouck, J.; Pauwels, P.; Bonduel, M.; Beetz, J.; Bekers, W. Scan-to-graph: Semantic enrichment of existing building geometry. Autom. Constr. 2020, 119, 103286. [Google Scholar] [CrossRef]
- Czerniawski, T.; Leite, F. Semantic Segmentation of Building Point Clouds Using Deep Learning: A Method for Creating Training Data Using BIM to Point Cloud Label Transfer. In Proceedings of the Computing in Civil Engineering 2019, Atlanta, GA, USA, 17–19 June 2019; pp. 410–416. [Google Scholar]
- Kang, T.-W.; Kim, J.-E.; Jung, T.-S. Study on 3D Reverse Engineering-based MEP Facility Management Improvement Method. J. Korea Acad. Coop. Soc. 2016, 17, 38–45. [Google Scholar] [CrossRef]
- Bosché, F.; Ahmed, M.; Turkan, Y.; Haas, C.T.; Haas, R. The value of integrating Scan-to-BIM and Scan-vs-BIM techniques for construction monitoring using laser scanning and BIM: The case of cylindrical MEP components. Autom. Constr. 2015, 49, 201–213. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Scan-to-BIM Pipeline Component | Data Item | Data Format |
|---|---|---|
| C1. Setup project | D1. Project information file | {name, description} |
| C2. Scan | D2. PCD file | {x, y, z, I, RGB} * |
| C3. Grid generation | C3. PCD file | {grid.ID, x, y, z, I, RGB} * |
| C4. Level of Detail (LoD) | D4. PCD file | PCD files |
| C5. Filtering | D5. Filtered PCD file | PCD files |
| C6. Segmentation | D6. Segmented PCD | {segment.ID, x, y, z, I, RGB} |
| C7. Geometry generation | D7. Geometry data | {geometry.ID, type, dimension *} Dimension = {name, value} |
| C8. BIM object generation | D8. BIM object data | {BIM.object.ID, type, dimension *, property*} Property = {name, value} |
| Class | Role |
|---|---|
| ScanToBIM_Pipeline | Manages the components that make up the pipeline. name:string = pipeline name execute() = pipeline execution function |
| Component | Define components for each stage of the pipeline workflow. name:string = pipline component name modulePath: string = component module path execute() = component execution function |
| Script | Manages a script that defines how each stage of the pipeline is executed. parameters = component parameters for execution execute() = script execution function |
| CommandContainer | Manages the recycling of commands that run pipeline workflows. |
| Command | Manages commands to run pipeline workflows. name:string = command name execute() = command execution function |
| CommandIterator | List of commands. |
| Component | Input | Output | Responsibility |
|---|---|---|---|
| ProjectSetup | Name description position | project setup file | Scan-to-BIM project setting parameter definition. |
| LoD | PCD file resolution (mm) | PCD file | Point cloud resolution is adjusted to a level appropriate for the purpose of use for processing large amounts of scan data. |
| PointCloudToGrid | PCD grid = {x, y, z} | PCD files | Split point cloud data into grids for processing large-scale scan data. |
| Filtering | PCD Noise = {density, kNN distance} clipbox = {x1, y1, z1, x2, y2, z2} | PCD | Removes noise from point groups within the divided grid. The removal method depends on the purpose of use and the scanning environment. The definition of the noise removal parameter specifies the distance between the low-density point group and the other point groups by kNN algorithm. The target point cloud area to be used is designated as a boundary box. |
| Segmentation | PCD cylinder = {min radius, max radius, min length, min curvature, max curvature} | Segmented PCD files parameter | To extract the cylinder shape from the point group, this study defines the features for the point group. Specify the minimum radius, maximum radius and length of the cylinder, which are the characteristics of the pipe shape. Also, the curvature of the points constituting the cylinder is specified. |
| ScanToGeometry | Segmented PCD Segmentation.parameter pipe = {radius, tolerance} * | geometry files | Convert pipe segment point cloud to geometry. Pipe shape dimensions are adjusted to a value corresponding to a radius within a given tolerance considering noise. |
| MergeGeometry | geometry files distance tolerance | geometry file | Segmented pipe shapes are merged with a given tolerance and merged into geometry. |
| GeometryToBIM | geometry fileobject = {type, property*} property = {name, value} | BIM file | Converts geometry files to BIM object files. Defines type and property information to convert to BIM object file. Property information consists of a name and a value. |
| Class | Role |
|---|---|
| point | It manages x, y, z real coordinate values and reflection intensity. |
| normal | It manages the normal vectors nx, ny, and nz required for point curvature and segmentation. |
| RGB | If the point has color values, this data is managed. Each color channel value ranges from 0 to 255. |
| BIM_object | Manages BIM object information mapped in the shape. |
| Case | 1 | 2 | 3 | 4 | Average | STD |
|---|---|---|---|---|---|---|
| Data Preprocessing (sec) | 3.58 | 21.93 | 146.21 | 919.5 | 272.8 | 435.8 |
| Data Visualization (sec) | 0.008 | 0.008 | 0.015 | 0.016 | 0.012 | 0.004 |
| Case | PCD | Filtering, LOD(MB) | Segmentation | Straight Pipe | Elbow-Type Pipe | ||
|---|---|---|---|---|---|---|---|
| Manual | Automatic | Manual | Automatic | ||||
| A | 480,220 | 331,595(5.05) | 97 | 60 | 51(85.0%) | 40 | 29(72.5%) |
| B | 364,340 | 122,166(1.86) | 35 | 60 | 55(91.7%) | 41 | 27(65.9%) |
| C | 807,509 | 343,056(5.23) | 175 | 90 | 78(86.7%) | 59 | 52(88.1%) |
| Average | 550,690 | 265,606(4.05) | 102.3 | 70.0 | 61.3(87.8%) | 46.7 | 36.0(75.5%) |
| STD | 229,835 | 124,355(1.90) | 70.2 | 17.3 | 14.6(3.48%) | 10.7 | 13.9(11.4%) |
| Program | PCD (GB) | Filtering (MB) | Pipe (A/B%) | Speed (min)(B/A%) |
|---|---|---|---|---|
| A. Proposed | 89,449,621 (2GB) | 8,994,608 (137MB) | 1099 | 8 |
| B. Compared | 89,449,621 (2GB) | - | 1053 | 55 |
| Difference (A−B) | - | - | 46 (104.4%) | 47 (687.5%) |
| Project Size (GB) | Project Count | Performance | Saved | ||
|---|---|---|---|---|---|
| Proposed | Compared | 1 Day (8 h) | 1 Month (20 Days) | ||
| 2 | 8 | 64 (1 h 4 m) | 440 (7 h 20 m) | −376 (6 h 16 m) | −7520 (125 h 20 m 15 days) |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, T.; Patil, S.; Kang, K.; Koo, D.; Kim, J. Rule-Based Scan-to-BIM Mapping Pipeline in the Plumbing System. Appl. Sci. 2020, 10, 7422. https://doi.org/10.3390/app10217422
Kang T, Patil S, Kang K, Koo D, Kim J. Rule-Based Scan-to-BIM Mapping Pipeline in the Plumbing System. Applied Sciences. 2020; 10(21):7422. https://doi.org/10.3390/app10217422
Chicago/Turabian StyleKang, Taewook, Shashidhar Patil, Kyubyung Kang, Dan Koo, and Jonghoon Kim. 2020. "Rule-Based Scan-to-BIM Mapping Pipeline in the Plumbing System" Applied Sciences 10, no. 21: 7422. https://doi.org/10.3390/app10217422
APA StyleKang, T., Patil, S., Kang, K., Koo, D., & Kim, J. (2020). Rule-Based Scan-to-BIM Mapping Pipeline in the Plumbing System. Applied Sciences, 10(21), 7422. https://doi.org/10.3390/app10217422