
Precision Interaction Force Control of an Underactuated Hydraulic Stance Leg Exoskeleton Considering the Constraint from the Wearer

 , , and
, , and
Abstract
1. Introduction
- (1)
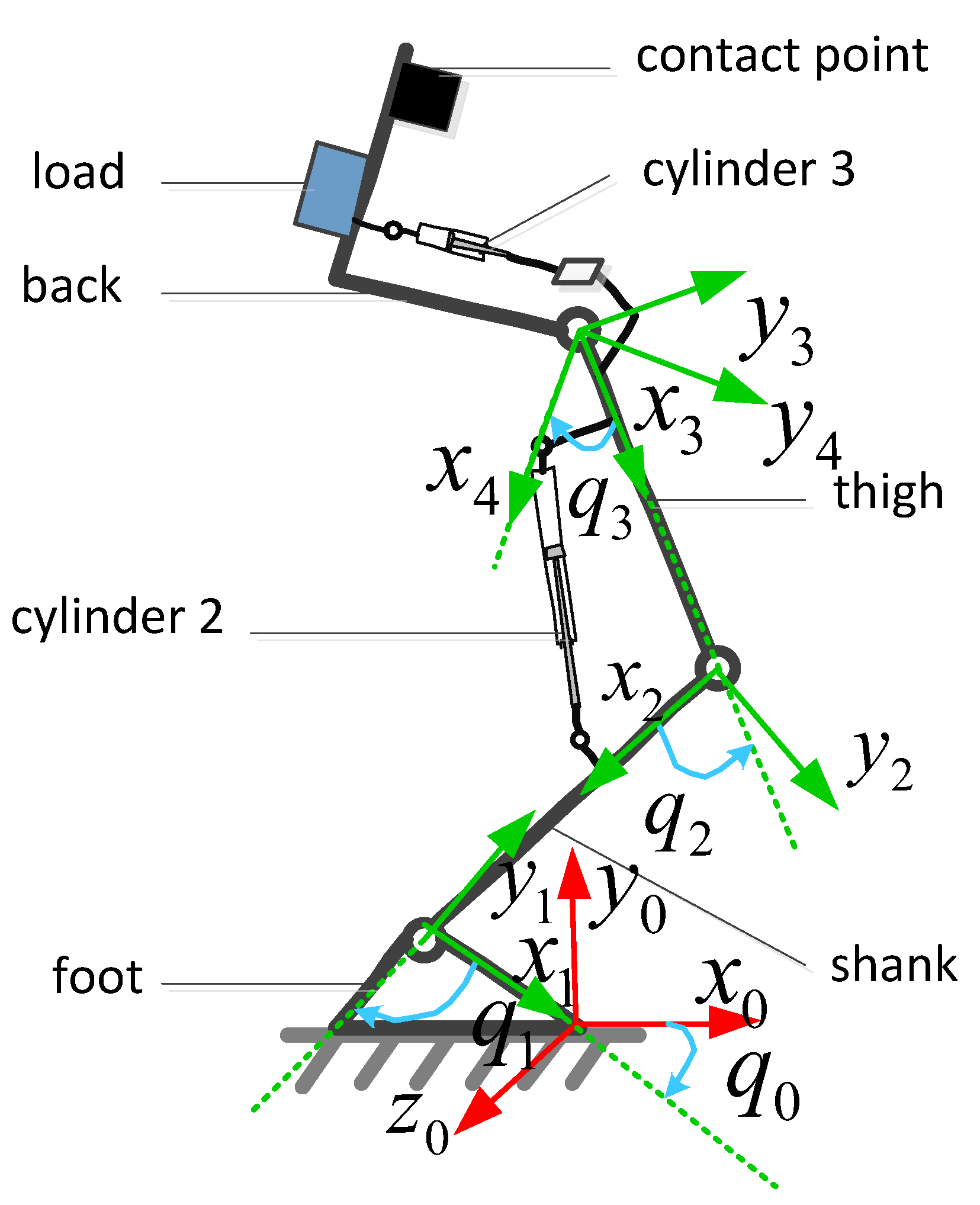
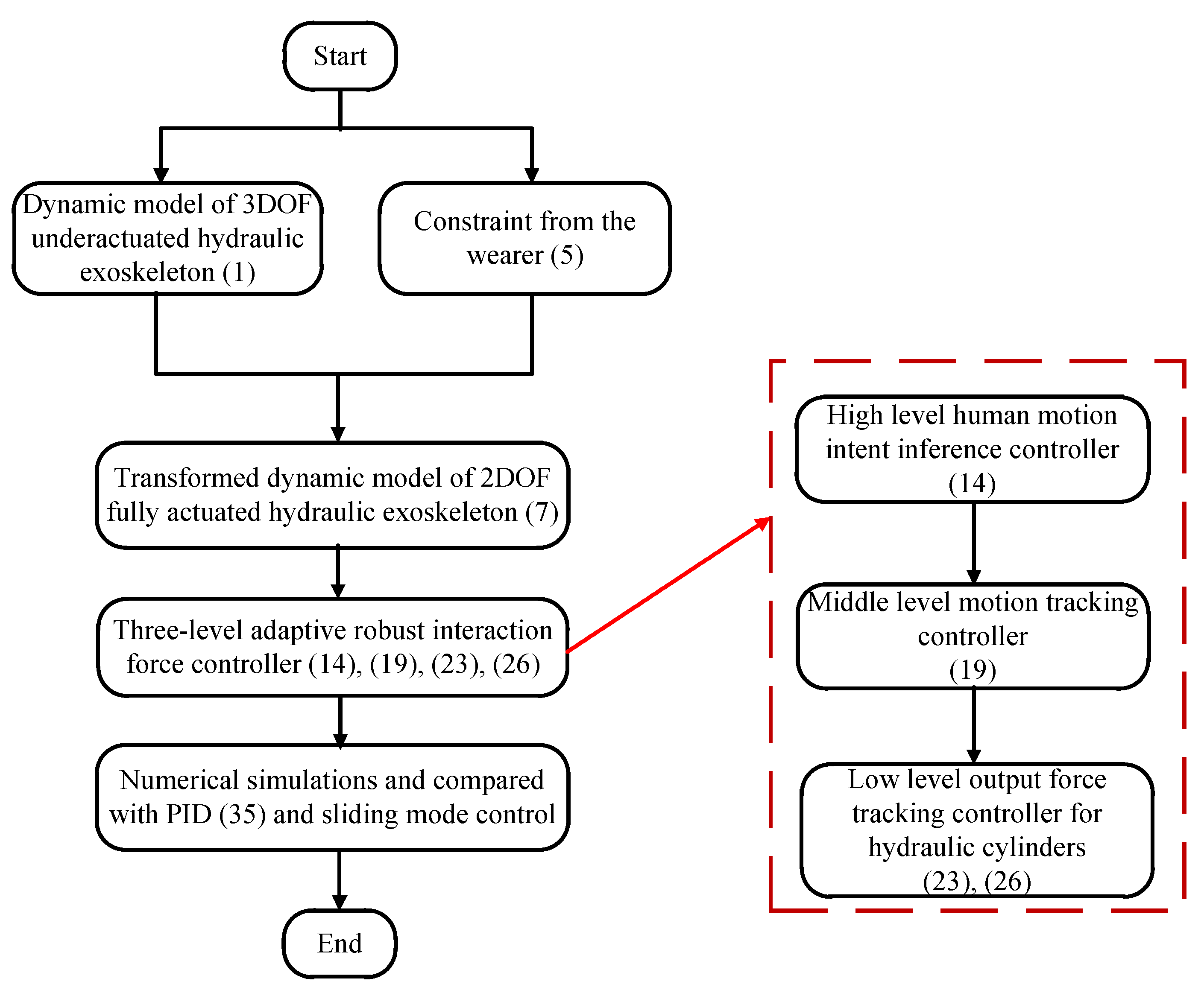
- Considering the control effect of the wearer, a holonomic constraint from the wearer is added to system dynamics, which help transform the dynamics of a 3DOF underactuated exoskeleton in joint space into a 2-DOF fully actuated system in Cartesian space. Parameter uncertainties (such as stiffness of human machine interface, parameters of hydraulic actuator and load changes) and uncertain nonlinearities (such as external disturbance and unmodeled dynamics) are considered in the modeling.
- (2)
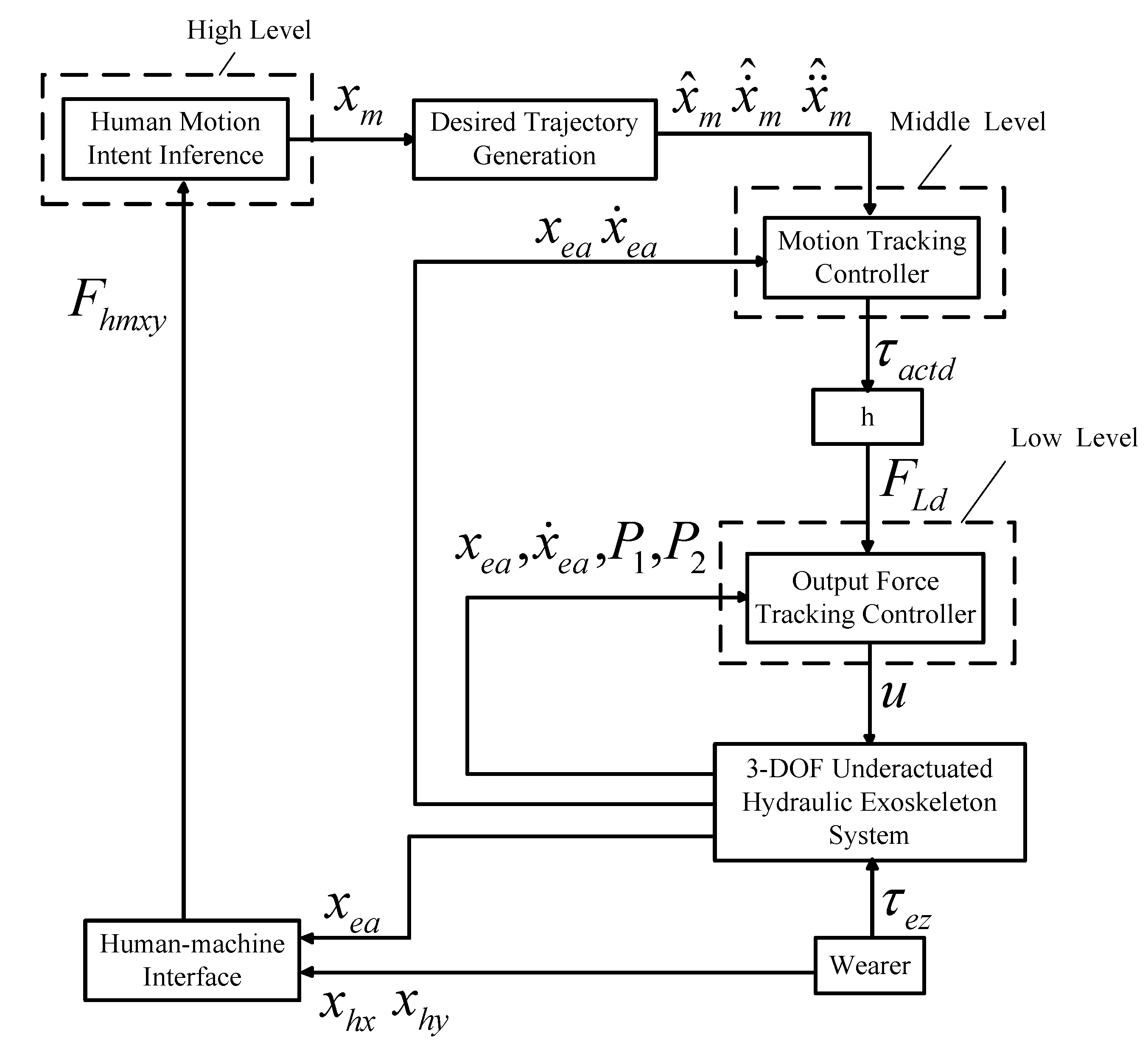
- A three level adaptive robust controller is proposed for an underactuated hydraulic stance exoskeleton to effectively deal with strong coupled high-order nonlinearities of a hydraulic system, various parameter uncertainties and modeling errors and precise interaction force control under various parameter uncertainties and uncertain nonlinearities is achieved.
2. System Dynamics
2.1. Dynamic Model
2.2. State Space Equation
2.3. Problem Statement
3. Interaction Force Controller Design
3.1. Overall Control Structure
3.2. High Level-Human Motion Intent Inference
3.3. Middle Level-Motion Tracking Controller
3.4. Low Level-Output Force Tracking Controller
3.5. Main Results
3.6. Gain Tuning Rules
4. Simulation Result
4.1. Simulation Setup
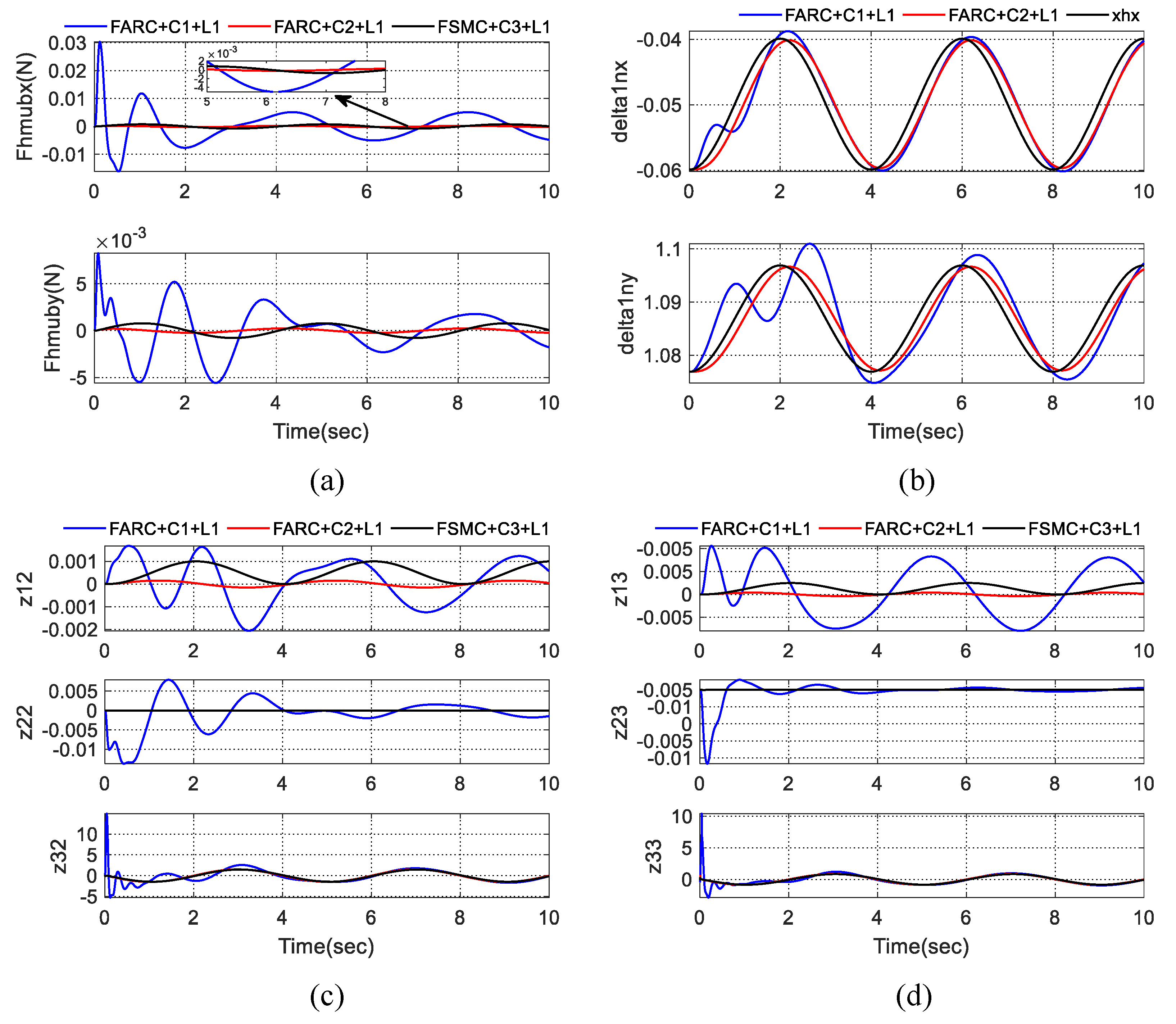
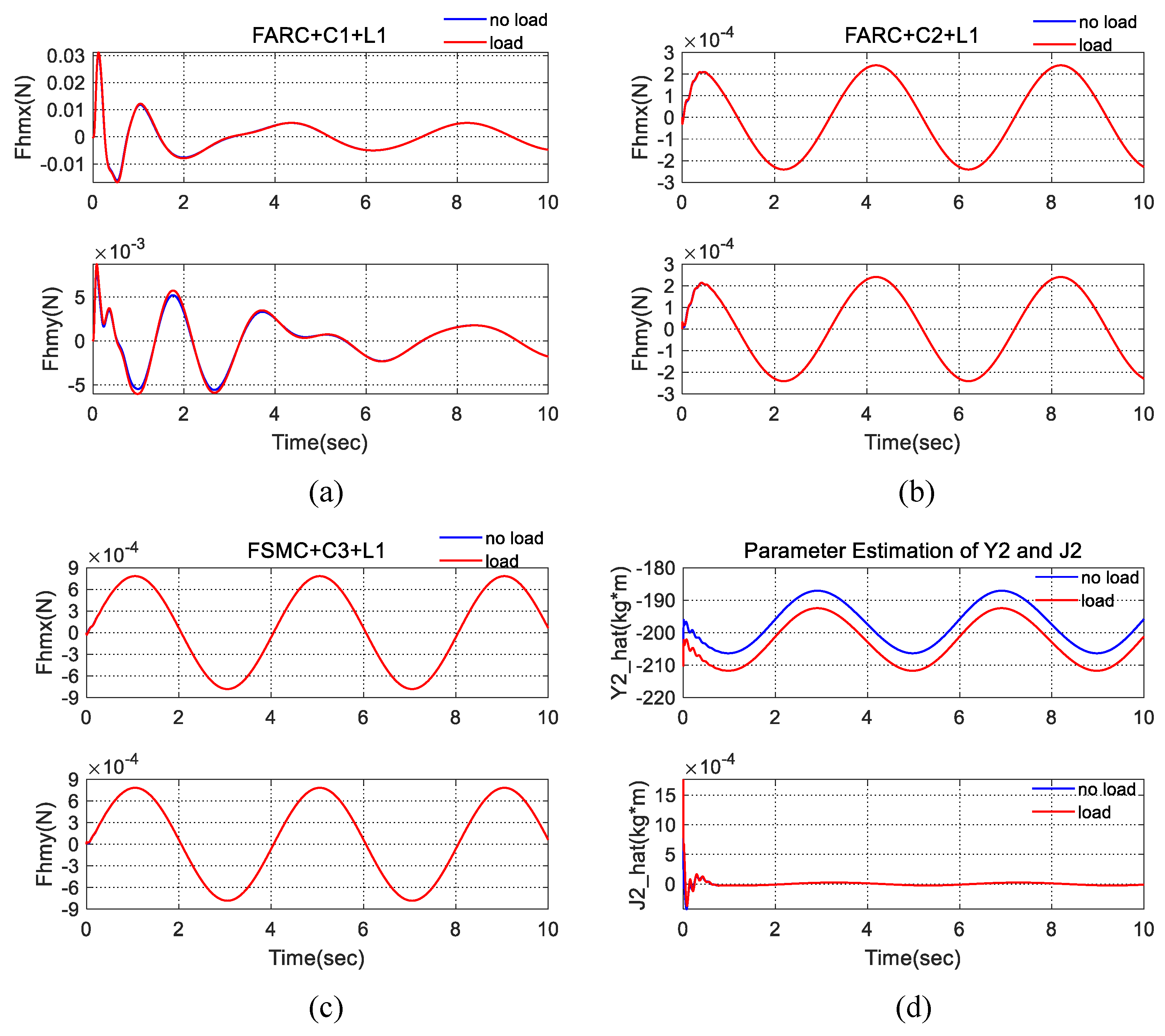
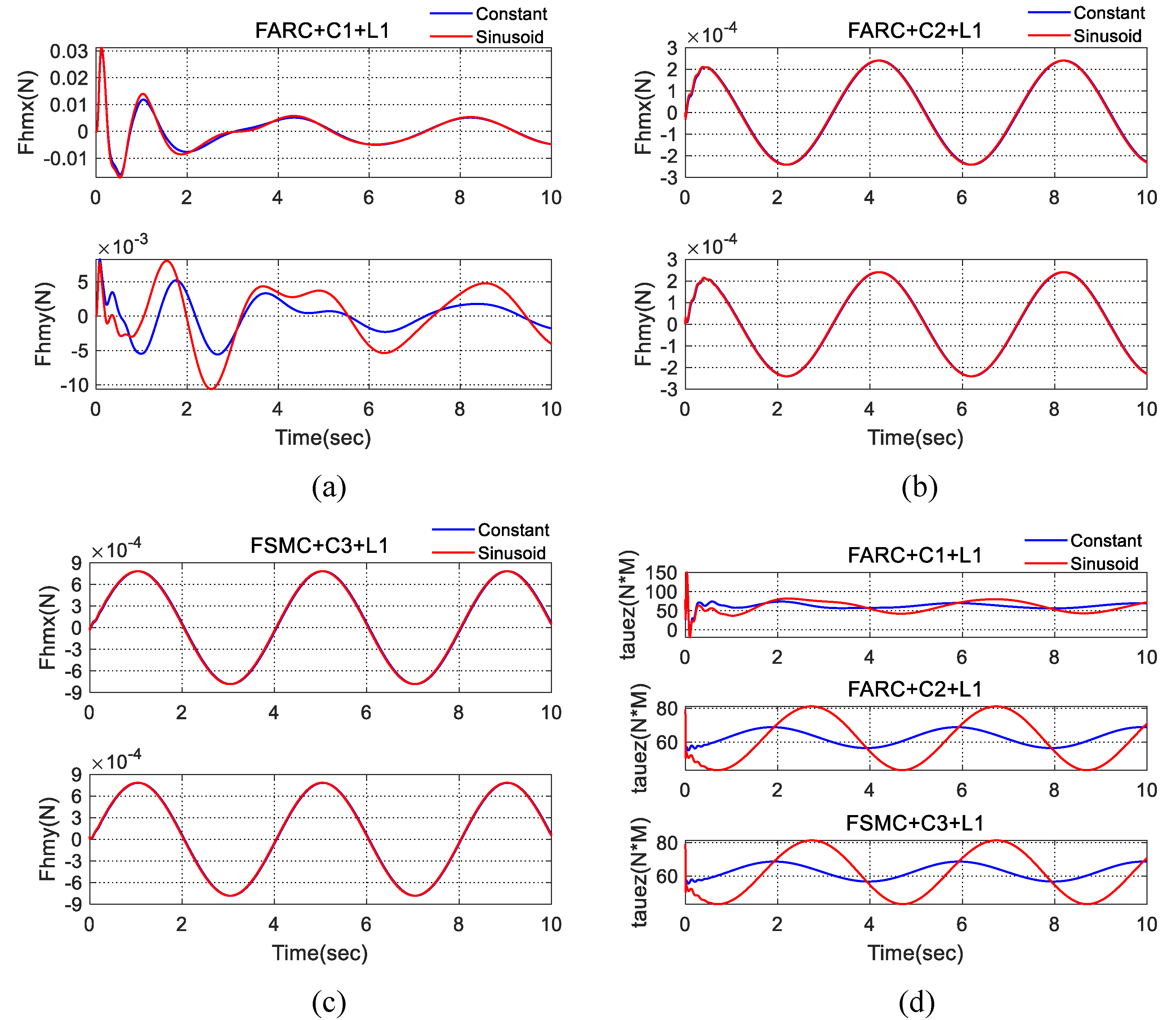
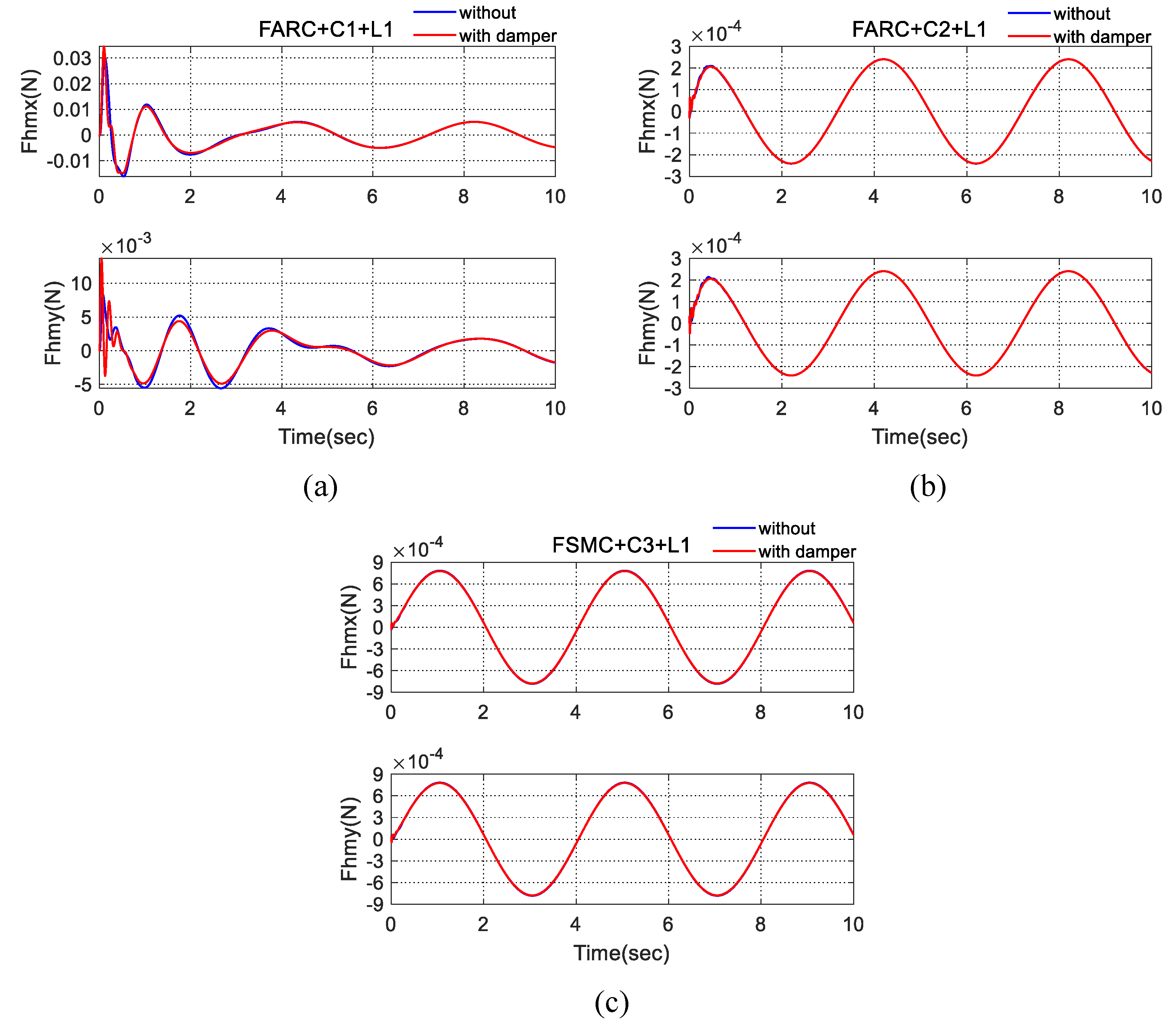
4.2. Simulation Result
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Roveda, L.; Savani, L.; Arlati, S.; Dinon, T.; Legnani, G.; Tosatti, L.M. Design methodology of an active back-support exoskeleton with adaptable backbone-based kinematics. Int. J. Ind. Ergon. 2020, 79, 102991. [Google Scholar] [CrossRef]
- Ebrahimi, A. Stuttgart Exo-Jacket: An exoskeleton for industrial upper body applications. In Proceedings of the 2017 10th International Conference on Human System Interactions (HSI), Ulsan, Korea, 17–19 July 2017; pp. 258–263. [Google Scholar]
- Verdel, D.; Bastide, S.; Vignais, N.; Bruneau, O.; Berret, B. An Identification-Based Method Improving the Transparency of a Robotic Upper Limb Exoskeleton. Robotica 2021, 1–18. [Google Scholar] [CrossRef]
- Mauri, A.; Lettori, J.; Fusi, G.; Fausti, D.; Mor, M.; Braghin, F.; Legnani, G.; Roveda, L. Mechanical and control design of an industrial exoskeleton for advanced human empowering in heavy parts manipulation tasks. Robotics 2019, 8, 65. [Google Scholar] [CrossRef]
- Copilusi, C.; Ceccarelli, M.; Carbone, G. Design and numerical characterization of a new leg exoskeleton for motion assistance. Robotica 2015, 33, 1147. [Google Scholar] [CrossRef]
- Bao, G.; Pan, L.; Fang, H.; Wu, X.; Yu, H.; Cai, S.; Yu, B.; Wan, Y. Academic Review and Perspectives on Robotic Exoskeletons. IEEE Trans. Neural Syst. Rehabil. Eng. 2019, 27, 2294–2304. [Google Scholar] [CrossRef]
- Chen, B.; Zi, B.; Qin, L.; Pan, Q. State-of-the-art research in robotic hip exoskeletons: A general review. J. Orthop. Transl. 2020, 20, 4–13. [Google Scholar] [CrossRef]
- Aliman, N.; Ramli, R.; Haris, S.M. Design and development of lower limb exoskeletons: A survey. Robot. Auton. Syst. 2017, 95, 102–116. [Google Scholar] [CrossRef]
- Hyun, D.J.; Park, H.; Ha, T.; Park, S.; Jung, K. Biomechanical design of an agile, electricity-powered lower-limb exoskeleton for weight-bearing assistance. Robot. Auton. Syst. 2017, 95, 181–195. [Google Scholar] [CrossRef]
- Kim, J.Y.; Cho, B.K. Development of a lower limb exoskeleton worn on the front of a human. J. Intell. Robot. Syst. 2019, 96, 49–64. [Google Scholar] [CrossRef]
- Liu, Y.; Gao, Y.; Zhu, Y. A Novel Cable-Pulley Underactuated Lower Limb Exoskeleton for Human Load-Carrying Walking. J. Mech. Med. Biol. 2017, 17, 1740042. [Google Scholar] [CrossRef]
- Long, Y.; Du, Z.; Chen, C.; Wang, W.; He, L.; Mao, X.; Xu, G.; Zhao, G.; Li, X.; Dong, W. Development and analysis of an electrically actuated lower extremity assistive exoskeleton. J. Bionic Eng. 2017, 14, 272–283. [Google Scholar] [CrossRef]
- Kim, H.; Shin, Y.J.; Kim, J. Design and locomotion control of a hydraulic lower extremity exoskeleton for mobility augmentation. Mechatronics 2017, 46, 32–45. [Google Scholar] [CrossRef]
- Chaparro-Rico, B.; Castillo-Castañeda, E. Design of a 2DOF parallel mechanism to assist therapies for knee rehabilitation. Ing. E Investig. 2016, 36, 98–104. [Google Scholar] [CrossRef]
- Islam, M.R.; Rahmani, M.; Rahman, M.H. A novel exoskeleton with fractional sliding mode control for upper limb rehabilitation. Robotica 2020, 38, 2099–2120. [Google Scholar] [CrossRef]
- Lu, R.; Li, Z.; Su, C.Y.; Xue, A. Development and learning control of a human limb with a rehabilitation exoskeleton. IEEE Trans. Ind. Electron. 2013, 61, 3776–3785. [Google Scholar] [CrossRef]
- Wang, L.; Du, Z.; Dong, W.; Shen, Y.; Zhao, G. Probabilistic sensitivity amplification control for lower extremity exoskeleton. Appl. Sci. 2018, 8, 525. [Google Scholar] [CrossRef]
- Huo, W.; Alouane, M.A.; Amirat, Y.; Mohammed, S. Force control of SEA-based exoskeletons for multimode human–robot interactions. IEEE Trans. Robot. 2019, 36, 570–577. [Google Scholar] [CrossRef]
- Chen, L.; Wang, C.; Song, X.; Wang, J.; Zhang, T.; Li, X. Dynamic trajectory adjustment of lower limb exoskeleton in swing phase based on impedance control strategy. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2020, 234, 1120–1132. [Google Scholar] [CrossRef]
- Roveda, L.; Maskani, J.; Franceschi, P.; Abdi, A.; Braghin, F.; Tosatti, L.M.; Pedrocchi, N. Model-based reinforcement learning variable impedance control for human-robot collaboration. J. Intell. Robot. Syst. 2020, 100, 1–17. [Google Scholar] [CrossRef]
- Roveda, L.; Haghshenas, S.; Caimmi, M.; Pedrocchi, N.; Molinari Tosatti, L. Assisting operators in heavy industrial tasks: On the design of an optimized cooperative impedance fuzzy-controller with embedded safety rules. Front. Robot. AI 2019, 6, 75. [Google Scholar] [CrossRef]
- Zhang, X.; Yin, G.; Li, H.; Dong, R.; Hu, H. An adaptive seamless assist-as-needed control scheme for lower extremity rehabilitation robots. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2020. [Google Scholar] [CrossRef]
- Rosales Luengas, Y.; López-Gutiérrez, R.; Salazar, S.; Lozano, R. Robust controls for upper limb exoskeleton, real-time results. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2018, 232, 797–806. [Google Scholar] [CrossRef]
- Yao, B.; Tomizuka, M. Adaptive robust control of SISO nonlinear systems in a semi-strict feedback form. Automatica 1997, 33, 893–900. [Google Scholar] [CrossRef]
- Yao, B.; Tomizuka, M. Adaptive robust control of MIMO nonlinear systems in semi-strict feedback forms. Automatica 2001, 37, 1305–1321. [Google Scholar] [CrossRef]
- Chen, S.; Chen, Z.; Yao, B.; Zhu, X.; Zhu, S.; Wang, Q.; Song, Y. Adaptive robust cascade force control of 1-DOF hydraulic exoskeleton for human performance augmentation. IEEE/ASME Trans. Mechatron. 2016, 22, 589–600. [Google Scholar] [CrossRef]
- Chen, S.; Chen, Z.; Yao, B. Precision cascade force control of multi-DOF hydraulic leg exoskeleton. IEEE Access 2018, 6, 8574–8583. [Google Scholar] [CrossRef]
- Zhu, S.; Jin, X.; Yao, B.; Chen, Q.; Pei, X.; Pan, Z. Non-linear sliding mode control of the lower extremity exoskeleton based on human-robot cooperation. Int. J. Adv. Robot. Syst. 2016, 13. [Google Scholar] [CrossRef]
- Liang, C.; Hsiao, T. Admittance Control of Powered Exoskeletons Based on Joint Torque Estimation. IEEE Access 2020, 8, 94404–94414. [Google Scholar] [CrossRef]
- Huo, W.; Mohammed, S.; Amirat, Y.; Kong, K. Fast Gait Mode Detection and Assistive Torque Control of an Exoskeletal Robotic Orthosis for Walking Assistance. IEEE Trans. Robot. 2018, 34, 1035–1052. [Google Scholar] [CrossRef]
- Choi, B.; Seo, C.; Lee, S.; Kim, B. Control of power-augmenting lower extremity exoskeleton while walking with heavy payload. Int. J. Adv. Robot. Syst. 2019, 16. [Google Scholar] [CrossRef]
- Ka, D.M.; Hong, C.; Toan, T.H.; Qiu, J. Minimizing human-exoskeleton interaction force by using global fast sliding mode control. Int. J. Control Autom. Syst. 2016, 14, 1064–1072. [Google Scholar] [CrossRef]
- Chen, S.; Han, T.; Dong, F.; Han, J.; Lu, L.; Liu, H. Adaptive Robust Force Control of an Underactuated Stance Leg Exoskeleton for Human Performance Augmentation. In Proceedings of the 2021 IEEE International Conference on Mechatronics (ICM), Kashiwa, Japan, 7–9 March 2021; pp. 1–6. [Google Scholar] [CrossRef]
- Deng, W.; Yao, J.; Wang, Y.; Yang, X.; Chen, J. Output feedback backstepping control of hydraulic actuators with valve dynamics compensation. Mech. Syst. Signal Process. 2021, 158, 107769. [Google Scholar] [CrossRef]
- Yang, X.; Yao, J.; Deng, W. Output feedback adaptive super-twisting sliding mode control of hydraulic systems with disturbance compensation. ISA Trans. 2021, 109, 175–185. [Google Scholar] [CrossRef] [PubMed]
- Lai, X.; Wang, Y.; Wu, M.; Cao, W. Stable control strategy for planar three-link underactuated mechanical system. IEEE/ASME Trans. Mechatron. 2016, 21, 1345–1356. [Google Scholar] [CrossRef]
- Zhang, P.; Lai, X.; Wang, Y.; Wu, M. Motion planning and adaptive neural sliding mode tracking control for positioning of uncertain planar underactuated manipulator. Neurocomputing 2019, 334, 197–205. [Google Scholar] [CrossRef]
- Yao, B.; Jiang, C. Advanced motion control: From classical PID to nonlinear adaptive robust control. In Proceedings of the 2010 11th IEEE International Workshop on Advanced Motion Control (AMC), Nagaoka, Japan, 21–24 March 2010; pp. 815–829. [Google Scholar]
- Li, C.; Chen, Z.; Yao, B. Identification and adaptive robust precision motion control of systems with nonlinear friction. Nonlinear Dyn. 2019, 95, 995–1007. [Google Scholar] [CrossRef]
- Roveda, L.; Forgione, M.; Piga, D. Robot control parameters auto-tuning in trajectory tracking applications. Control Eng. Pract. 2020, 101, 104488. [Google Scholar] [CrossRef]
- Roveda, L.; Magni, M.; Cantoni, M.; Piga, D.; Bucca, G. Human–robot collaboration in sensorless assembly task learning enhanced by uncertainties adaptation via Bayesian Optimization. Robot. Auton. Syst. 2021, 136, 103711. [Google Scholar] [CrossRef]
- Winter, D.A. Biomechanics and Motor Control of Human Movement; John Wiley and Sons: Hoboken, NJ, USA, 2009. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller | |||||
|---|---|---|---|---|---|
| FARC + C1 + L1 | |||||
| x axis | FARC + C2 + L1 | ||||
| FSMC + C3 + L1 | |||||
| FARC + C1 + L1 | |||||
| y axis | FARC + C2 + L1 | ||||
| FSMC + C3 + L1 |
| Controller | |||||
|---|---|---|---|---|---|
| FARC + C1 + L1 | |||||
| x axis | FARC + C2 + L1 | ||||
| FSMC + C3 + L1 | |||||
| FARC + C1 + L1 | |||||
| y axis | FARC + C2 + L1 | ||||
| FSMC + C3 + L1 |
| Controller | |||||
|---|---|---|---|---|---|
| FARC + C1 + L1 | |||||
| x axis | FARC + C2 + L1 | ||||
| FSMC + C3 + L1 | |||||
| FARC + C1 + L1 | |||||
| y axis | FARC + C2 + L1 | ||||
| FSMC + C3 + L1 |
| Controller | |||||
|---|---|---|---|---|---|
| FARC + C1 + L1 | |||||
| x axis | FARC + C2 + L1 | ||||
| FSMC + C3 + L1 | |||||
| FARC + C1 + L1 | |||||
| y axis | FARC + C2 + L1 | ||||
| FSMC + C3 + L1 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, S.; Han, T.; Dong, F.; Lu, L.; Liu, H.; Tian, X.; Han, J. Precision Interaction Force Control of an Underactuated Hydraulic Stance Leg Exoskeleton Considering the Constraint from the Wearer. Machines 2021, 9, 96. https://doi.org/10.3390/machines9050096
Chen S, Han T, Dong F, Lu L, Liu H, Tian X, Han J. Precision Interaction Force Control of an Underactuated Hydraulic Stance Leg Exoskeleton Considering the Constraint from the Wearer. Machines. 2021; 9(5):96. https://doi.org/10.3390/machines9050096
Chicago/Turabian StyleChen, Shan, Tenghui Han, Fangfang Dong, Lei Lu, Haijun Liu, Xiaoqing Tian, and Jiang Han. 2021. "Precision Interaction Force Control of an Underactuated Hydraulic Stance Leg Exoskeleton Considering the Constraint from the Wearer" Machines 9, no. 5: 96. https://doi.org/10.3390/machines9050096
APA StyleChen, S., Han, T., Dong, F., Lu, L., Liu, H., Tian, X., & Han, J. (2021). Precision Interaction Force Control of an Underactuated Hydraulic Stance Leg Exoskeleton Considering the Constraint from the Wearer. Machines, 9(5), 96. https://doi.org/10.3390/machines9050096