2. Related Works
Switching operations are performed not only to isolate faults, but also to connect or disconnect parts of the power supply network to achieve the purpose of isolating parts of the system, for maintenance or balancing production and consumption. Any switching operation determines a change in the state of the system. Because an ideal switch between two zones is not physically possible, a transient response within the system will inevitably occur during this switching process, which can determine the appearance of overcurrent or overvoltage. For each type of load, comparative analysis was performed to assess the influence of the parameters on the switching process, such as: ambient temperature, the supply voltage of the triggering coils, as well as the pressure of the hydraulic agent of the actuator.
The paper presents, in detail, the controlled switching process of high voltage circuit breakers (HVCB) and describes the theory and technology of the circuit breakers that are used today [
2,
3]. The paper discusses the benefits of controlled switching as well as how to determine the optimal time command of the controlled switches in order to reduce the effects of the transient switching regime. The study presented in this paper also refers to the transient regimes that occur. The research presented in this paper is based on [
2,
4,
5], which detail the HVCB controlled switching.
The simulations performed confirm the benefits of controlled switching, namely improvements in circuit breaker performance, reduction in switching in the transient regime, reduced equipment maintenance costs, extended equipment life and improvements in energy quality. These advantages are also presented in [
2].
The process of interruption of high voltage circuits has been studied in the literature in a large number of scientific papers, because electricity is widely used in all fields of activity. However, the need for electric power quality has increased more and more [
2]. Customers expect that electric power to be supplied without interruption and at the best values of electrical parameters. Under these conditions, the disturbance levels are not acceptable, because they can lead to a series of failures [
2,
3].
Gas Insulated Substations (GIS) are currently widely used due to their operational safety [
6]. In such substations, high voltage circuit breakers are widely used because they can quickly interrupt the fault and, thus, can prevent damage to electrical equipment [
6]. Based on an HVCB study, the authors of [
7] analyzed the defects that appear during switching of these types of GIS, as well as the failure of GIS isolation in the switch opening and closing process.
In [
8], a close–open time control method is proposed using an auxiliary switch. According to this paper, the average close–open time for SF6 breakers was determined statistically to be 23–35 ms.
In [
9], research is performed on transient circulation current that appears in the switching process of SF6 circuit breakers. A method for accurately calculating the transient circulation current is presented here.
The process of dynamic disconnection of electrical circuits takes place simultaneously with the ignition between the contacts of the switching equipment, which are called electrodes, through the column in which the current continues to flow [
10]. The final extinction of the electric arc occurs at the zero crossing of the current, compared to which the transient recovery voltage has a sufficiently low growth rate, so that it can no longer produce the reigniting of the electric arc. Different mathematical models of circuit breakers have been developed as tools to assess circuit breaker capacity and to investigate the interaction between circuit breakers and external circuits.
In [
11], the breaking capacity of a circuit breaker is analyzed, both for high currents and also for relatively small capacitive and inductive currents. In the case of inductive currents, a large amount of energy is stored in the inductive elements, which can generate an overvoltage when the current breaks. When the capacitive currents are interrupted, there is a danger of unsuccessful interruption at the first current crossing through zero. In the cases of both capacitive and inductive switching, the process is influenced by the transient recovery voltage (TRV).
The authors of [
12] investigate the measurement of transient pressures in a high voltage circuit breaker of 252 kV during high current interruption.
In [
13] the impact of electric arc ignition speed of SF6 circuit breakers on arc contact erosion is analyzed. The study proved that the electric arc ignition speed has a significant effect on contact erosion.
In [
14], the self-powered ring main unit is studied. Arc quenching methods are also studied to make this analysis possible. A main ring unit is used to perform voltage and current measurements of the power supply grid in order to detect failures.
3. The Switching Process
The current interruption of a circuit breaker normally occurs at zero value of current, in a time interval of microseconds. In the interruption process of the current, several processes take place simultaneously [
15].
After the current is interrupted, the arc voltage remains constant in the high current range, rises to a peak value known as the extinction voltage, and then falls to zero with a very steep slope of the variation du/dt.
The current crosses the zero value with a variable slope of di/dt, but can be distorted under the influence of the arc voltage. The electric arc has a resistive character and, therefore, the arc voltage and current reach zero value at the same time, as demonstrated in [
16,
17].
Around the zero value of the current, the energy in the arc channel is quite low (practically at the zero value of the current, and there is no increase in energy) and when the arc length is at its maximum, the current can be interrupted.
After the power supply is interrupted, the gas between the switch contacts is still hot. The process is characterized by a steep slope of the recovery voltage and of the resulting electric field. The charged particles begin to circulate and cause a current called the post-arc current. The presence of the post-arc current, combined with the transient recovery voltage, conducts energy consumption in the hot gas channel.
At the beginning of the extinguishing process, when the energy of the arc is formed by the individual gas molecules dissociated into free electrons and positive ions, the plasma state of the arc is restored, and the current cannot be interrupted. This phenomenon is called thermal switching of the circuit breaker.
When the power supply disconnect is achieved, the hot gas cools and the post-arc current disappears. Another electrical discharge can occur when the dielectric strength of the space between the circuit breaker contacts is not sufficient to withstand the transient recovery voltage.
In [
18], the current interruption process of a circuit breaker is presented. It was shown in [
18] that there is a strong interaction between the physical process involving the breaker contacts and the network connected with the terminal of the breaker. This leads to the simplest lumped-element representation of the power system.
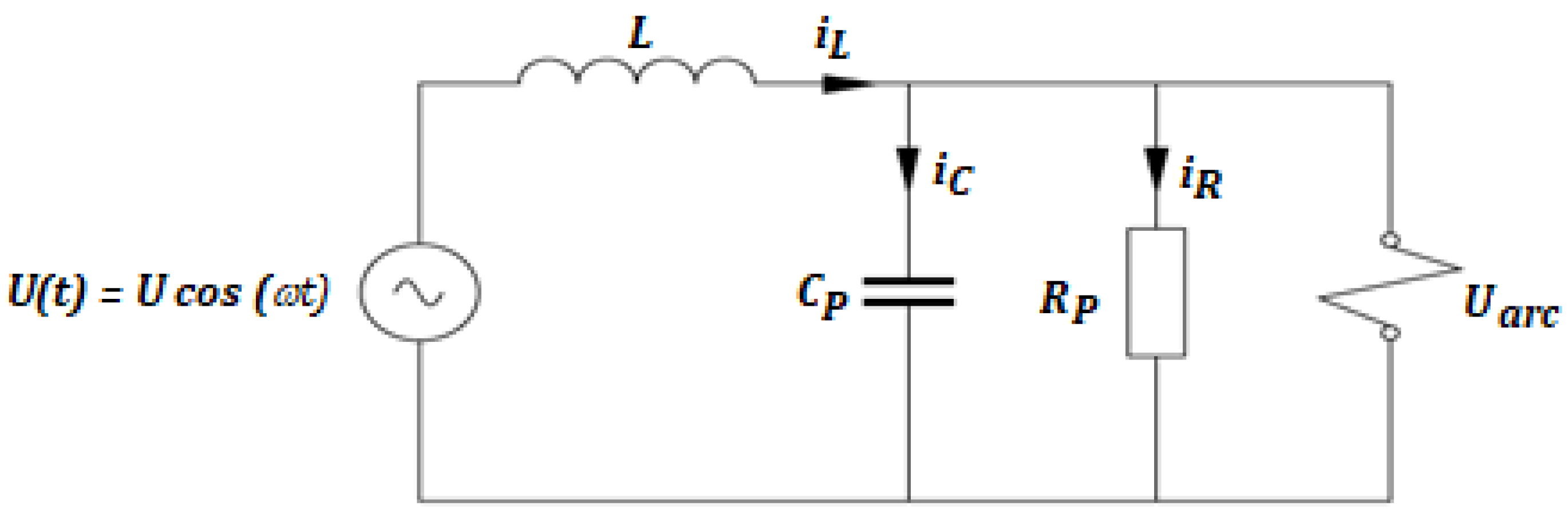
Figure 1 presents the elements of the electrical network connected to the circuit-breaker terminals. All the variables used in this research paper are listed in the nomenclature section.
The current is canceled by a combined action of
Rp and
Cp, the arc energy decreases, and the cooling of the mechanism has a period which depends on the time constant of the circuit. In [
18], it was demonstrated that the equation of the interruption time is presented in (1), where u
0 represents the constant arc voltage, which causes a resistive current [
18].
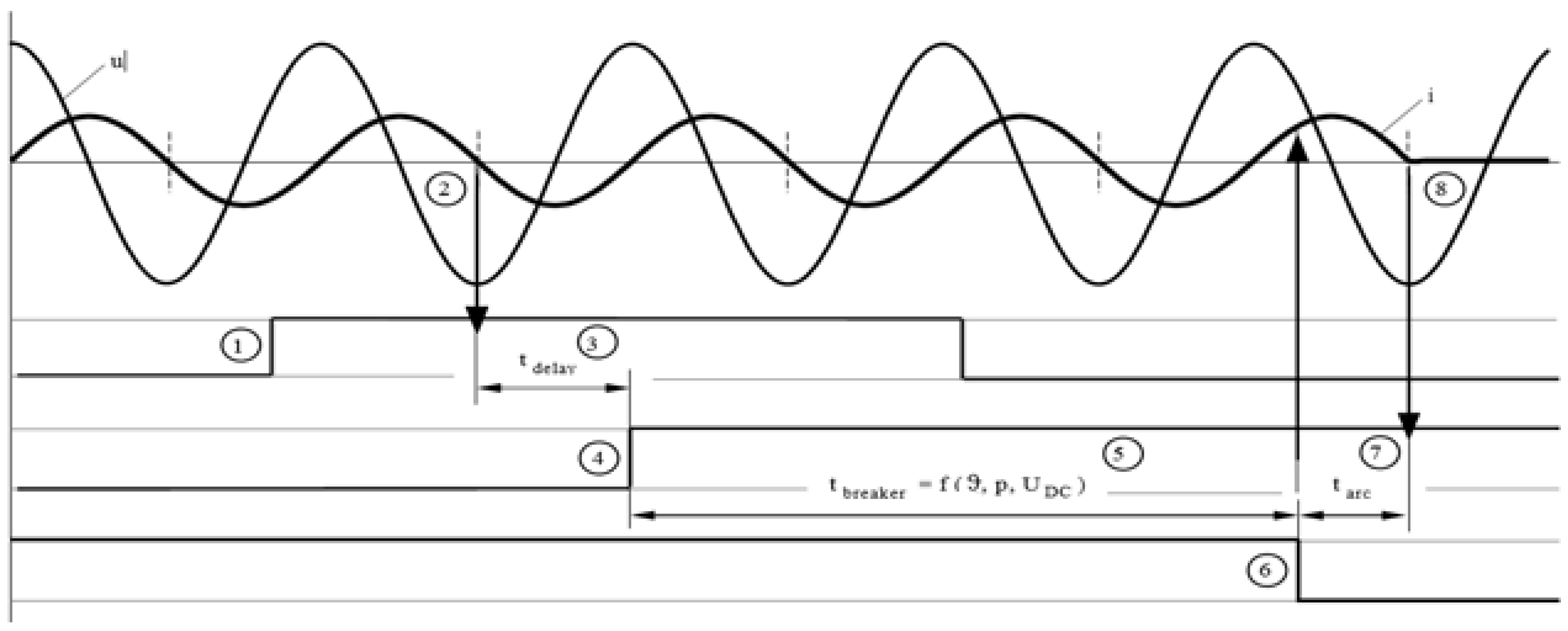
When the current is interrupted, the voltage on
Cp, and on
Rp, is equal to zero. The transient recovery, at the appearance of the voltage between the circuit breaker contacts, presumes the charging of the
Cp capacity and causes the so-called time delay of the waveform, TRV [
19].
To increase the breaking capacity of the circuit breaker, a parallel capacitor is mounted on the SF6 circuit breakers. After a disconnecting operation, the transient currents will circulate through the system and, after a connecting operation, when a high frequency current is interrupted, a transient recovery voltage or TRV will appear at the circuit-breaker terminals [
19].
The configuration of the electrical network at the circuit-breaker terminals determines the amplitude, frequency and shape of the current and voltage oscillations.
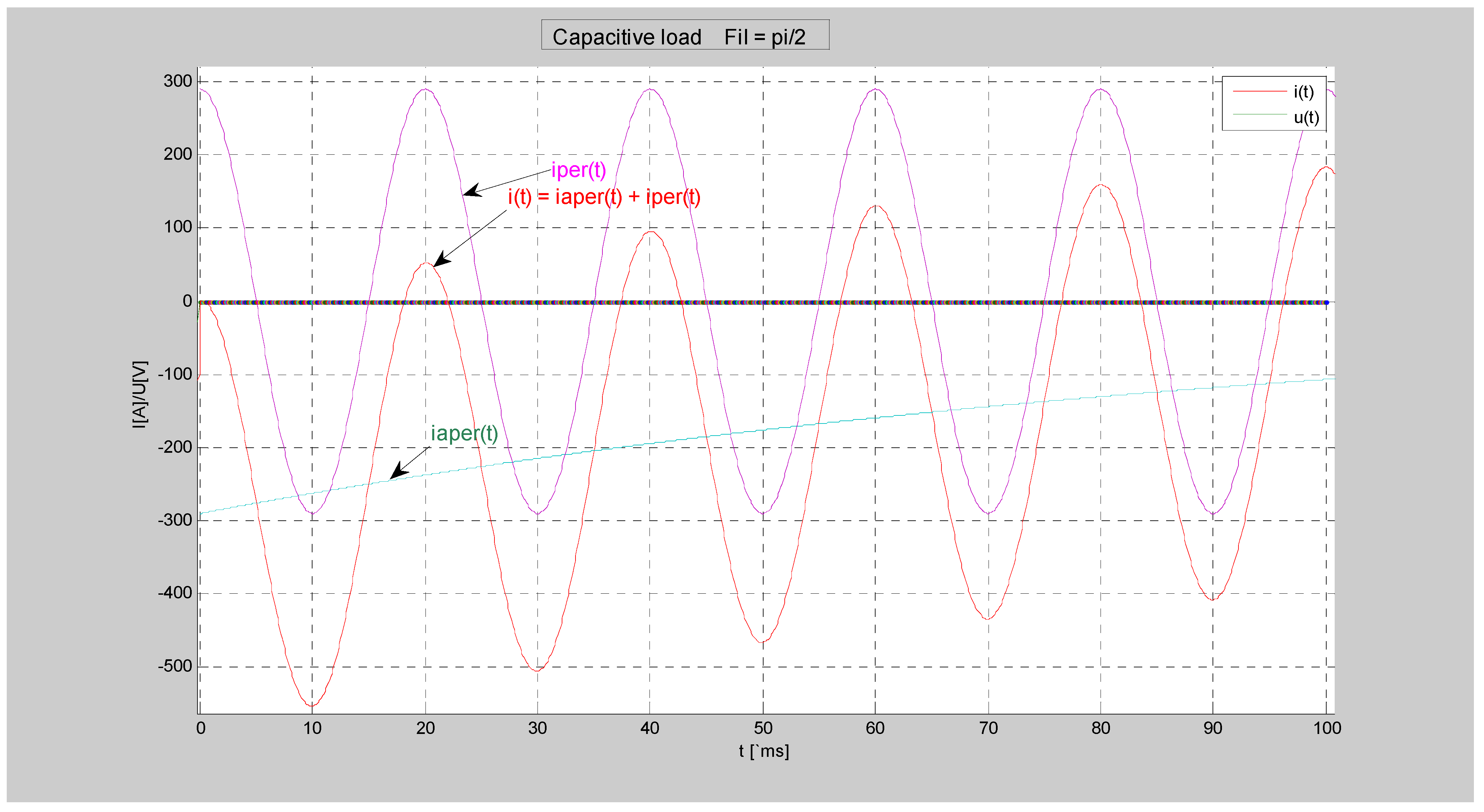
When capacitor banks used for voltage control are placed in a station, the disconnecting devices interrupt a mainly capacitive load when operating under normal charging conditions. The phase difference between current and voltage is about 90° on a capacitive charge.
When a high power transformer is disconnected in a normal load situation, the current and voltage are out of phase by about 90° on an inductive charge.
A fault usually consists of a short circuit.
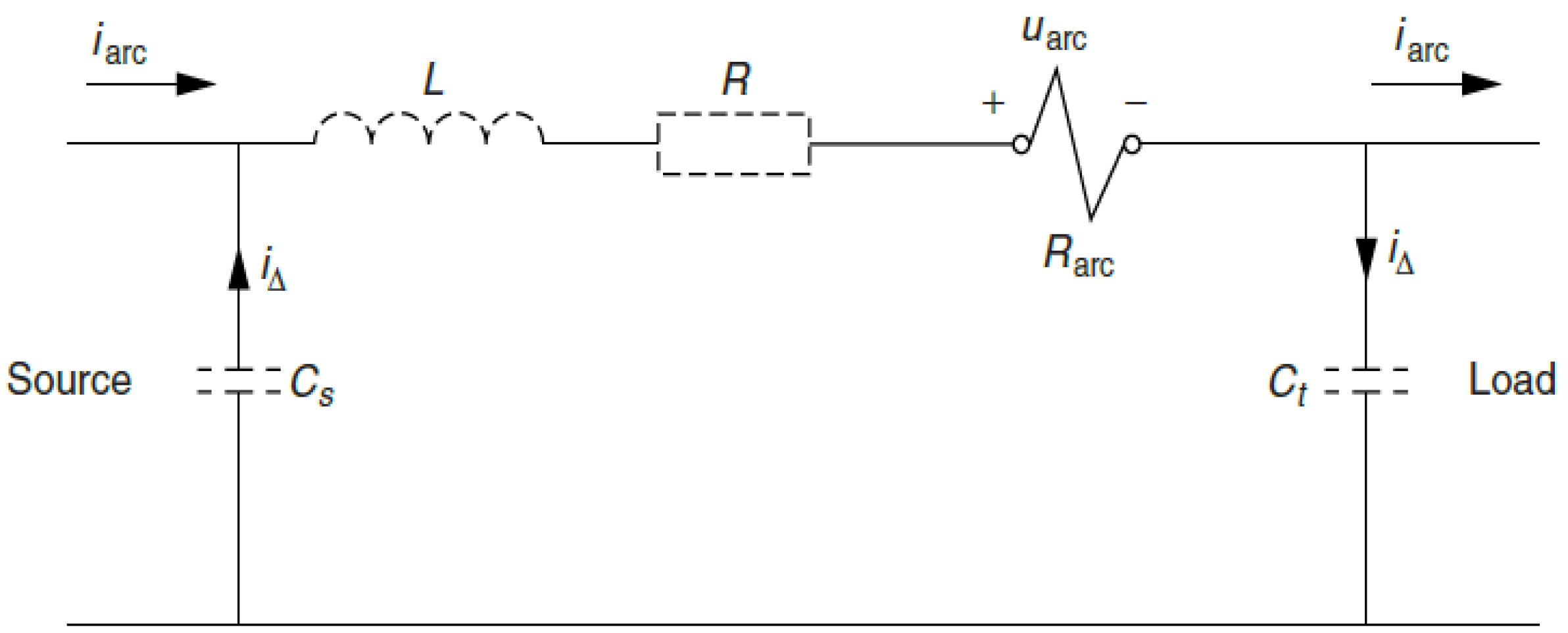
Figure 2 depicts a fault between one phase and null on a high voltage transmission line at distances ranging from a few hundred meters to a few kilometers from the circuit-breaker terminals.
In [
18], the difference between current chopping and virtual chopping was presented, and it was specified that in the case of virtual chopping, the arc is made unstable through a superimposed high-frequency current caused by oscillations with the neighboring phases in which current chopping took place. Virtual chopping has been observed for gaseous arcs in air, SF6 and in oil. Based on this observation,
Figure 2 shows the lumped-element representation of a breaker interrupting a small inductive current. The relationship between arc voltage and current is presented in Equation (2).
The parameter α is a constant in the range (0.4 and 1) [
18]. If the high frequency oscillation causes a small disturbance of the arc current, and assuming that the arc channel is in steady-state, the Equation (2) determines the relationship between the arc current and the arc voltage [
20].
From
Figure 2, Equation (3) can be deduced:
In [
18], it was demonstrated that if
Rarc is steady-state arc resistance, the following can be derived from Equation (2):
In Equation (3) u0 is residual voltage on CS and Ct and equivalent capacity .
By differentiating the Equation (3) and replacement of
Rarc and
dRarc/dt, the following is obtained:
The characteristic Equation of (5) is:
Solutions of Equation (6) are given in Equation (7):
According to Equation (7), the circuit from
Figure 2 oscillates when the expression
is negative as in Equation (8), i.e., [
21]:
From the point of view of the values of R and Rarc, we can have three cases:
If Rarc > R results in oscillations in which the amplitude increases, the system is unstable;
If Rarc < R, it is clear that the created regime is a depreciated regime;
If Rarc = R, a permanent oscillatory regime will result.
The value of the current depends on the extinguishing medium and the capacity of C, which is around 0.01–0.05 μF.
For gas extinguishing circuit breakers, the extinguishing current may vary from amperes for SF6 up to tenths of amperes for vacuum circuit breakers.
Controlled switching, also known as point-on-wave (POW) switching, is defined as control operations of the switch so that in each phase of an AC network power supply, the current interruption occurs at moment times that are optimal for the switch and switched load, and does not affect power quality, as shown in [
1,
22]. Point on wave prevents high inrush currents that are associated with the mechanical switching of transformers, reactors and capacitors, as demonstrated in [
22,
23,
24].
The electric arc, as a circuit element, is characterized by a nonlinear dependence between its voltage and current and also by a resistive character, as detailed in [
1,
25,
26].
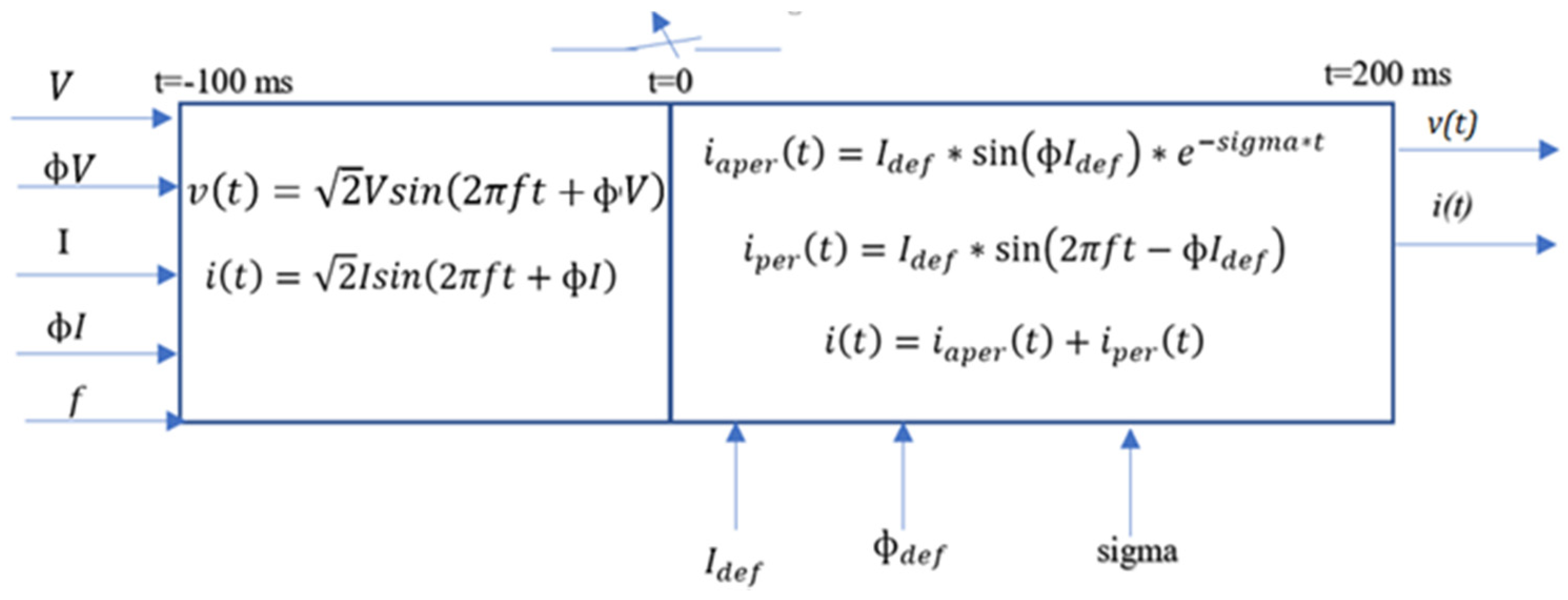
Figure 3a represents the electric scheme of the circuit, illustrating the interruption of a short-circuit current. It contains an I
1-main switch and an I
2-auxiliary switch. Switching the I
2 to ON, it is possible to discharge the capacitor Co, which is initially loaded with the polarity from the figure. At the interruption of a short-circuit current i
c(t) simultaneously with the switching I
1 to OFF, the switch I
2 is turned to OFF, so the intensity i(t) a of the current through the arc results from Equation (9).
The arc extinction process involves disconnected circuit parameters (voltage transient recovery, which produces a request for dielectric current interruption, which is conducive to circuit breaker heating) as well as the circuit breaker-specific parameters (breakdown voltage chamber extinction, which expresses the speed of dielectric rigidity restoration, and also the electric arc voltage, which is dependent on the degree of cooling and the extinguishing medium).
In short intervals, containing the moments of current cancellation, the arc column temperature, and also its conductance, are rapidly decreased, demonstrating a process of recovery of the dielectric strength, as shown in [
22,
27,
28,
29].
When the current is cancelled, corresponding to the periodic extinction of the arc current, the transient voltage is applied between the contacts of the circuit breaker. In general, it can be assumed that the definitive extinction of the electric arc is obtained at the moment of the normal cancellation of the current, according to which the transient voltage has a growth rate sufficiently low that it cannot produce the rebound of the electric arc, neither by thermal packing nor by thermodynamic breakthrough. These considerations refer to the usual cases of dynamic disconnection in alternating current installations, corresponding to either normal load or short-circuit regimes.
6. Conclusions
The controlled switching process has the advantage that, due to the small values of arcing times during the interruption of the fault, it can extend the lifespan of the circuit breaker.
Based on the presented simulation results, the following conclusions were identified: the calculation algorithm can be adapted according to the needs of the user since the control time can be set very close to zero, i.e., to the start moment of the transient regime. The main advantage of the program is that it calculates the moment of disconnection at zero crossing current. The defects caused by transient phenomena are influenced by the frequency of the intersection of the time axis, i.e., zero is not a constant factor due to the aperiodic component. The precision of the zero crossing point can be modified to the precision of 1 microsecond.
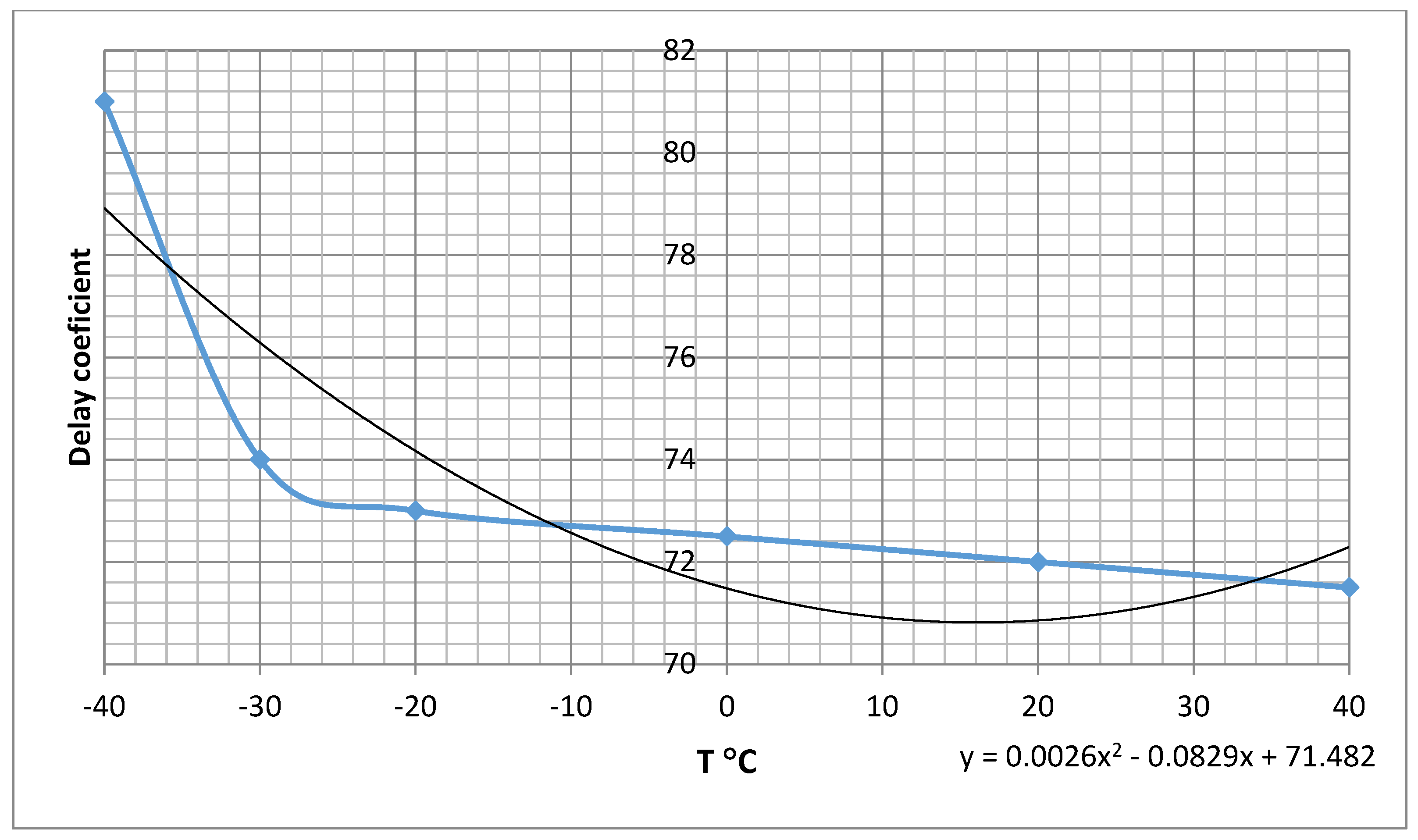
If it is not possible to determine the temperature, pressure and voltage characteristics, an approximation of the total disconnection time can be made from the field measurements and an error margin of 20 ms can be added.
Simulation results of the opening time for SF6 circuit breakers depend on the switch type. For each type of switch, its characteristics must be enhanced depending on the temperature, on the DC voltage supply and on the hydraulic agent pressure.
In situations in which the circuit breaker operates under normal conditions, i.e., the temperature within the range of 0 °C ÷ 40 °C, we can approximate the temperature coefficient to 22 ms for the opening operation. To check these times, it is necessary to use auxiliary contacts that copy the position of the circuit breaker contacts very quickly and accurately. The calculation algorithm for the connection time is simple. It all comes down to calculating the various time points and applying the command to the switch’s coil at the appropriate time. Measurement is performed with high precision by means of existing transducers in the temperature and voltage.
The simulations were conducted for a single phase. If the circuit breaker control is monopolar, then the phase shift command must be transmitted in phase to the studied phase with a certain calculated delay.
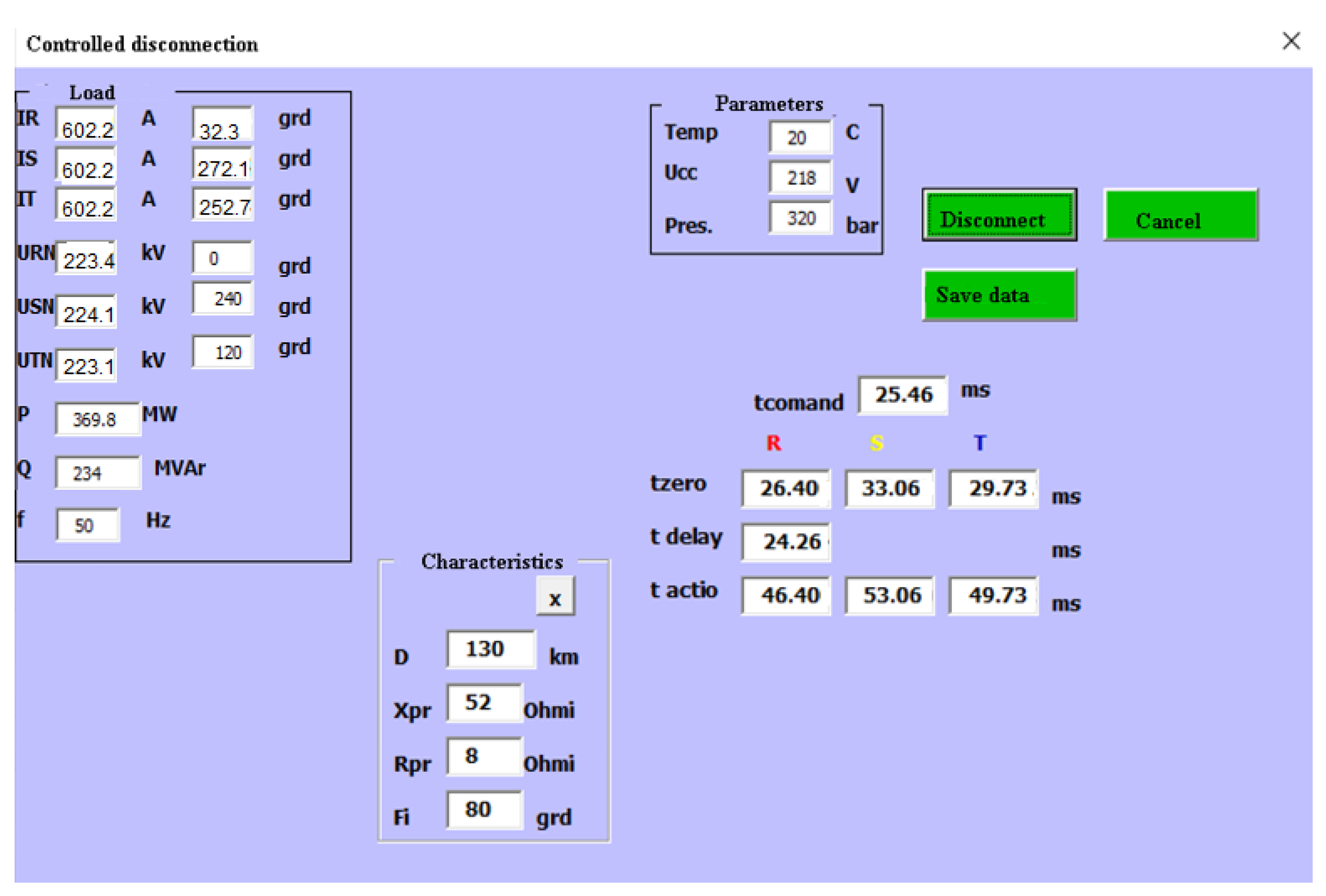
Based on these observations, the system for implementing the theory presented in this paper in industry was presented in the second part of
Section 5. This system was designed for the current protection system at an 800 MW power plant, specifically for the 400 kV high voltage line protection circuits. The protection system has been in use for nearly two years, and the results obtained thus far confirm that the research presented in the paper is fully applicable in industry.

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}