Abstract
An interesting property of the inverse F-transform of a continuous function f on a given interval says that the integrals of and f on coincide. Furthermore, the same property can be established for the restrictions of the functions to all subintervals of the fuzzy partition of used to define the F-transform. Based on this fact, we propose a new method for the numerical solution of ordinary differential equations (initial-value ordinary differential equation (ODE)) obtained by approximating the derivative via F-transform, then computing (an approximation of) the solution by exact integration. For an ODE, a global second-order approximation is obtained. A similar construction is then applied to interval-valued and (level-wise) fuzzy differential equations in the setting of generalized differentiability (gH-derivative). Properties of the new method are analyzed and a computational section illustrates the performance of the obtained procedures, in comparison with well-known efficient algorithms.
1. Introduction
The fuzzy transform (F-transform) of a continuous function was introduced by Perfilieva in [1,2]. This special fuzzy method is particularly appealing and useful to handle many real-world problems and an extensive research activity has both analyzed its properties and its fields of applications; for the literature related to this paper we refer to, e.g., [3,4,5,6,7,8,9,10,11] and the references therein.
In recent research, attention has been paid to the numerically approximated solutions of ordinary differential equations (ODEs) of various types. In particular, it is shown that by using the inverse F-transform, it is possible to obtain good approximations of the solution . The methods that use the F-transform are (computationally) superior with respect to other ones such as the second-order Runge–Kutta algorithm or basic multi-step algorithms (see [12,13,14,15,16]). In the final section of this paper, we will present some comments and a preliminary comparative valuation of the proposed methods.
In this paper, we propose a numerical method where the inverse F-transform is used to approximate the derivative ; the solution is then obtained by exact integration of the approximated derivative: this is allowed by an interesting property which says that the integral of the inverse F-transform of f on coincides (exactly) with the integral of the function f itself; this idea was presented in a preliminary form in [17].
For an ordinary differential equation, including the case of a system, a global second-order approximation is obtained. Properties of the new method are analyzed and a computational section illustrates the performance of the obtained procedures, in comparison with well-known efficient algorithms.
A similar construction is then applied to interval-valued (IDE) and (level-wise) fuzzy differential equations (FDE) in the setting of generalized differentiability (gH-derivative, see [18,19,20]). IDEs and FDEs are designed to model uncertainty and its propagation in a dynamical setting and it is well known that the fuzzy case can be expressed in terms of a family of IDEs by adopting the level-wise representation of fuzzy numbers and fuzzy-valued functions. For a modern introduction to FDEs under Hukuhara and generalized derivative, we refer to chapter 9 of Bede’s book [21]. The interested reader is also referred to the recent book [22], in particular to chapter 4, and the references therein.
This paper is organized into five sections. In Section 2 we recall some of the basic definitions and properties of the F-transform as contained in [1,2,23]. Then, in Section 3, we describe our approach to the numerical solution of ordinary (and systems of) differential equations with initial conditions, usually referred as Cauchy problem. The F-transform is used to approximate the derivative of the solution to be founded and the unknown function is determined by point-wise by exact integration of the derivative; this section also contains the main properties of the method and a proof of its (global) convergence. Numerical examples and a computational comparison with other well-performing algorithms is presented in Section 4. Section 5 considers the case of interval differential equations and extends the use of F-transform to the numerical solution of IDEs and FDEs under (level-wise) generalized Hukuhara differentiability; in particular, the switching phenomenon is analyzed and rule to manage the switching is proposed and implemented in the proposed procedure. Several computational examples of interval and fuzzy differential equation are presented and discussed in Section 6. Section 7 presents some conclusions and present some ideas for further work.
2. Preliminaries
We briefly recall the basic definitions and properties of the F-transform setting. For all the details, we refer to the papers [1,2,23].
A fuzzy partition of the compact interval is defined by a finite decomposition of with n points and by a family of n continuous basic functions with the following properties (the decomposition is not required to be uniform):
- for (), for , for ;
- for all and for all ;
- for , is increasing on and decreasing on , is decreasing on , is increasing of .
Let us define the following integrals
and
The direct F-transform of f with respect to is the n-tuple of real numbers defined as
and, obtained from the direct fuzzy transform , the inverse F-transform (iF-transform) of f is the function given by
The following properties (see [1]) are the fundamentals of the F-transform setting.
Proposition 1.
(from [1]) If is a continuous function then;
- 1.
- for any positive real ε, there exists a fuzzy partition such that the corresponding iF-transform satisfy
- 2.
- for all ,where .
- 3.
- the direct and inverse F-transforms are linear, i.e., for any and for any two continuous functions , with direct F-transforms and with respect to the same partition ; then
- 3.1.
- the direct F-transforms of and are, respectively, and ,
- 3.2.
- the inverse F-transform of and are, respectively, and .
In [10], the following property has been established:
Proposition 2.
Let be continuous functions and let be a fuzzy partition of . Then
- (i)
- the iF-transform satisfies
- (ii)
- if f ang g have the same direct F-transform components , then
It is interesting to observe that a fuzzy partition has a “nesting” property (its proof is immediate):
Proposition 3.
Let be a fuzzy partition of interval with and consider any subinterval with ; let be the fuzzy partition of defined by
where the last basic function is given by the restriction of the basic function to the subinterval . The fuzzy partition , is called the k-th nested partition associated with and clearly .
A consequences of the properties above is the following proposition:
Proposition 4.
Let be a continuous function and let be its F-transform with respect to . Then, for any , the F-transform of the restriction of f to the subinterval (with respect to the k-th nested partition ), is given by where only the last component is changed with respect to the components in and is given by
We have, for all (the central summation is assumed to be zero if ),
and
Proposition 5.
Let be a continuous function, let be a uniform fuzzy partition of with and let be the F-transform of f; let also be as in (9) for any . Then
Proof.
Consider . We have and, by the trapezoidal integration,
on the other hand, and , so . For the second equality (consider that ) we have
□
3. Numerical Solution of Initial-Value ODE by F-Transform
Let us consider the following initial-value ordinary differential equation (ODE):
We assume the usual requirements on function that ensure existence and unicity of the solution , .
We are interested to find an approximation of the final value of the solution . Let be a fixed (but arbitrary) uniform fuzzy partition of with , , and ; let be the basic functions. Let denote the iF-transform of with (exact) direct F-transform components .
In the rest of the paper, we will make use of the following functions and notation: for any basic function , , we will denote by the integral function defined by
The components of the direct F-transform of will be denoted by and the inverse F-transform of of is the function
The following proposition follows immediately from (10).
Proposition 6.
If the exact values of the direct F-transform components of the function on with respect to the fuzzy partition are known, then the final value of the solution of (12) is exactly given by
Furthermore, at the intermediate points , of the decomposition , we have that the solution is exactly given by
Proof.
By definition, we have
and, from property (ii) in Proposition 1, also
we then obtain
Remark 1.
Consider that in general we have , for .
From the properties of F-transform as in Proposition 1 (point 3.) we finally have the following
Proposition 7.
If the exact values of the direct F-transform components of the function on with respect to a fuzzy partition are known, then the solution of (12), for all , satisfies
where
Proof.
Apply the identity and (14). □
3.1. An F-Transform Algorithm for ODE
In view of Propositions 6 and 7, we then need a way to compute or to approximate the direct F-transform components of .
By definition, we have that (here and ), for ,
and, from Proposition 5,
As a final step, substitute and obtain, for ,
Approximated values and of and , respectively, can be computed by solving the following equations (we will assume that the sums below will be zero if )
To solve Equations (18) and (19) let us write them for different values of . The first component can be determined from the initial condition , obtained from by ignoring the term :
From the first equation we determine and, by substituting into the second, we compute .
For a general the values are known and we need to solve Equation (19) only for
then we set .
Summarizing, we determine the values and iteratively from (23) starting with (20). Each Equation (23) has the form of a fixed-point problem for
and can be solved by any zero finder routine or, considering that the system is in (nonlinear) triangular form, by any iterative procedure.
We have the following approximation property for the solution of (12).
Theorem 1.
Then, for the solution of (12) at the points , , we have
Proof.
From (14), (24) and (25) we have
From we get and as and the conclusion follows. □
The last theorem allows development of the following algorithm for the numerical solution of ODE based on F-transform.
Algorithm ODE-FT: Find an approximated final value of the ODE with initial condition
- Step 1.
- Step 2.
- For , compute the solutions of Equation (23) and define
- Step 3.
- The final value (corresponding to ) is the desired approximation of with as .
Theorem 1 ensures that the algorithm ODE-FT is (globally) convergent. Clearly, the convergence of the algorithm ODE-FT assumes that the solutions of Equation (23) are solved with high precision, independent on the number n of points of the fuzzy partition; in practice, if the exact solutions are approximated and substituted in the algorithm by quantities , it is required that they are such that for small positive tolerances and fixed small ; in this case, taking into account that , and consequently , the precision of ODE-FT is such that
and, for , . In the computations reported in this paper, we have solved the fixed-point problems either exactly (in the case of linear differential equations) or, in the nonlinear cases, with a tolerance in the absolute difference between two successive iterates of the used equation solver.
3.2. Extension to Systems of ODEs
The extension of the described procedure to solve systems of ordinary differential equations with initial conditions in the form
We can find an approximation of the final value of each function , , in terms of a fixed fuzzy partition of , e.g., , , and and basic functions . Let denote the iF-transform of with direct F-transform components , then, the final value can be obtained, in terms of the components and the initial condition :
where , .
The direct F-transform components of the functions on with respect to a fuzzy partition are given, in this case, by d simultaneous systems of equalities (here and ), for ,
and, for all and , we obtain, by substituting , for ,
Approximated values and of and , respectively, are computed by solving the systems of d equations
The first components , from the initial condition , are
and, for , with the known values , we need to solve the system of d equations for
where we have denoted ; finally, we set .
Each system of Equation (29) has the form of a fixed-point problem for and can be solved by any zero finder routine or by an iterative procedure similar to the one already described, adapted for the simultaneous case:
3.3. The Case of Linear ODE
When the ODE is linear, with , then the algorithm ODE-FT can be simplified considerably, because Equation (23) for is
and one obtains from and, for ,
remark that the denominator can be controlled to be non-zero by choosing an appropriate (small) value of h; in particular when has positive values, in order to have it is sufficient to choose h (or, equivalently, n) such that for all .
4. Computational Results for ODEs
The algorithm ODE-FT described in Section 2 has been implemented in MATLAB and used to solve a series of d-dimensional ODEs with and 4. For some of them the exact solution , , is available and the performance of our algorithm is evaluated by comparing the found solutions and at a number M of points ; for the problems without exact solutions, the comparison is performed with the solution found using the well-known Runge–Kutta–Fehlberg (RK) combination of fourth- and fifth-order approximation algorithm available in MATLAB function ode45, one of the possibly best implementations of the explicit RK method with variable step-size adaptation.
The first example proposes a simple (non-trivial) calculation of the erf function (see [24], Problem P6-1)
at points , by solving the ODE (anti derivative problem)
Our solution at points , that approximates , is found by applying algorithm ODE-FT successively on each subinterval , , starting with the first interval (initial condition to find ) and continuing by solving (32) on subsequent subintervals , , with the initial condition . On each subinterval, algorithm ODE-FT is applied with a uniform fuzzy partition , with nodes and triangular basic functions . We remark that with the decomposition of interval into 101 points and a fuzzy partition of each subinterval , , with nodes, the resulting (fixed) step size for solving (32) on is (and ).
To compare the found solution with the values obtained using routine in MATLAB, we found the average absolute error ; at the final point , we have and with error .
To test the validity of the ODE-FT algorithm, we have performed two numerical experiments on two series of ODEs.
For the first experiment, we have chosen five non-trivial problems with known exact solution; this allows comparison of the one obtained by ODE-FT with the exact one.
In the second experiment we solve other five typical well-known ODEs and we compare our solutions with the ones obtained by well-established routines in MATLAB, like ode45 (based on explicit single step Runge–Kutta method of orders 4 and 5 with step-size control), ode113 (a variable-step and variable-order method based on Adams–Bashforth–Moulton discretizations of orders 1 to 13) or ode15i (an implicit variable-step and variable-order solver of orders 1 to 5, particularly efficient for stiff problems).
4.1. ODEs with Known Exact Solutions
The five ODEs for the first experiment are denoted Ex1 (single equation, ) and Ex2, Ex3, Ex4, Ex5 (systems of two equations, ).
For all the examples, we provide the following MATLAB output:
- -
- MFT = … number M of points where the solution is computed;
- -
- N = Number of nodes in the partition ;
- -
- hstep = … step size h used on each subinterval , ;
- -
- FunctionEvaluations = total number of function evaluations required by algorithm ODE-FT.
- -
- Final FT value = …(final value found for at , ;
- -
- AveErrFT = Average absolute error , ;
- -
- MaxErrFT = Maximum absolute error , ;
- -
- Final Exact value = …(final value of at , ;
- -
- Error in Final value = (, )
Problem Ex1 (Logistic equation with unitary carrying capacity): Solution interval is ;
The exact solution is (, ).
The first run with MFT = 101 and N = 2 (corresponding step size ) produced the following results:
AveErrFT = 3.131431926296436 , MaxErrFT = 8.708952653480040
Final FT: = 6.905591487503622 ,
Final Exact: = 6.905678577030157 ,
Final Error: Errx( 1) = -8.708952653480040 .
The second run uses MFT = 101 and N = 41, corresponding to a step size , produces the following better result, with a final error of the order 5 :
MFT = 101, N = 41, hstep = 2.5 , FunctionEvaluations = 14,798.
AveErrFT = 1.957156456839409 , MaxErrFT = 5.443002715210810 .
Final FT: = 6.905678522600129 ,
Final Exact: = 6.905678577030157 and
Final Error: Errx( 1) = -5.443002715210810 .
Problem Ex2: (non-autonomous nonlinear system): Solution interval is ;
The exact solution is .
The solution is first computed using MFT = 101, N = 41, hstep = 2.50 , FunctionEvaluations = 15,988, with the following results:
AveErrFT = 1.0 * (0.057812917960167, 0.117536307911936),
MaxErrFT = 1.0 * (0.208599681972288, 0.491491372045516),
Final FT: = 8.414709639479283 , = 1.557407773804039 ,
Final Exact: = 8.414709848078965 , = 1.557407724654902 ,
Final Error: Errx(1) = −2.085996819722880 , Errx(2) = 4.914913720455161
If the step size is reduced to the error decreases significantly,
MFT = 1001, N = 101, hstep = 1.0 , FunctionEvaluations = 301,000.
AveErrFT = 1.0 * (0.091807074367543, 0.186150663977414),
MaxErrFT = 1.0 * (0.333676419828066, 0.786386511464343),
Final FT: = 8.414709847745289 , = 1.557407724733541 .
Problem Ex3 (stiff, linear, see [24], Section 6.5): Solution interval is ;
The exact solution is .
The first run uses MFT = 51, N = 11, hstep = 0.001 and FunctionEvaluations = 550, with:
AveErrFT = 1.0 * (0.173411281358034, 0.170428606844124),
MaxErrFT = 1.0 * (0.853912256957301, 0.853928757786893),
Final FT: = 2.426122537762081 , = −1.213061268881040 ,
Final Exact: = 2.426122638850534 , = -1.213061319425267 and
Final Error: Errx(1) = −1.010884531638112 , Errx(2) = 5.054422635986100 .
By reducing the step size, i.e., MFT = 501, N = 101, hstep = 0.00001, FunctionEvaluations = 50,500, we obtain:
AveErrFT = 1.0 * (0.459480472441389, 0.459450580577288),
MaxErrFT = 1.0 * (0.919708563218436, 0.919708564739441),
Final FT:
Final Exact: and
Final Error: Errx(1) = , Errx(2) = .
Problem Ex4: (Lotka–Volterra system, see, e.g., [14]) Solution interval is ;
The exact solution is .
In this case, the first run with MFT = 21, N = 6, hstep = 0.01, FunctionEvaluations = 820, produced:
- AveErrFT =
- MaxErrFT = (0.004132636807097, 0.000295217766130),
- Final FT:
- Final Exact:
- Final Error: Errx(1) = Errx(2) =
while in the second run with MFT = 201, N = 41, hstep = 1.25 , FunctionEvaluations = 32,200, the results are significantly better:
- AveErrFT =
- MaxErrFT =
- Final FT:
- Final Exact:
- Final Error: Errx(1) = Errx(2) =
Problem Ex5: (linear, see [14]) Solution interval is ;
The exact solution is .
The first run is executed with MFT = 11, N = 2, hstep = 0.1, FunctionEvaluations = 20 and produced a solution with
AveErrFT = (0.000949321158793, 0.003176265306333),
MaxErrFT = (0.001690735853275, 0.008258267736959),
Final FT:
Final Exact:
Final Error: Errx(1) = Errx(2) =
By reducing the step size to 0.01 (MFT = 11, N = 11, FunctionEvaluations = 110), the errors reduce to AveErrFT = MaxErrFT =
Finally, using MFT = 101, N = 201, hstep = , FunctionEvaluations = 20,100, the result is
Final FT:
Final Exact: , with
AveErrFT =
MaxErrFT =
4.2. ODEs without Known Closed-Form Solution
The five ODEs for the second experiment are nonlinear d-dimensional systems denoted No1 (), No2 (), No3 (), No4 () and No5 ().
These ODEs are generally considered to be numerically difficult to solve and are frequently used to test ODE solvers, in comparison with existing well-performing procedures. We have executed algorithm ODE-FT using MATLAB in parallel with well-established routines in MATLAB, in particular with routine ode45 (based on explicit single step Runge–Kutta method of orders 4 and 5 with step-size control) and, in one case, with routines ode113 (a variable-step and variable-order method based on Adams–Bashforth–Moulton discretization of orders 1 to 13) and ode15i (an implicit variable-step and variable-order solver of orders 1 to 5, particularly efficient for stiff problems).
Now, as we have explained in Section 2, the performance of algorithm ODE-FT depends essentially on the step size h resulting from the two parameters MFT and N; on the other hand, our simple implementation of ODE-FT does not consider variable step size, designed to control adaptively the local discretization and/or approximation errors. For this reason, we have first executed routine ode45 to compute the solution at an appropriate number M of points and, from the output of ode45, we have computed the number N of nodes for the fuzzy partition in such a way that is of the same order as the optimal step size determined by ode45. In this way, the two routines produce solutions by using a step size of the same magnitude and the comparison does not depend on this element; for example, suppose that in solving an ODE on time domain at M uniform points , , routine ode45 returns, e.g., an optimal step size , we then execute algorithm ODE-FT with MFT = M and with N so that .
We remark that to determine the step size for ODE-FT, we can freely play with the two parameters MFT and N; in our experiment, in order to balance the number of Equation (29) to solve and the memory requirements, we have limited values of N between 11 and 501, so determining M to obtain the required step size, eventually by increasing M to take N in the range above.
Problem No1: Solution interval is ;
Routine ode45 solves this ODE with optimal step size and final solution vector
We execute ODE-FT with MFT = 10,001, N = 21 so that hstep = 7.853981633974483 , with final solution
At the MFT points where the solution is approximated, the average and the maximum absolute differences between the FT solution and the RK solution for each are:
AveDiffFTRK =
MaxDiffFTRK =
See Figure 1 for the graphical representation of the found solutions. For this example, Figure 2 pictures the differences between the FT solution and the RK solution for the three components , at the MFT points. It is interesting to observe that the differences oscillate in sign, showing that in absolute value the differences are not systematically diverging.
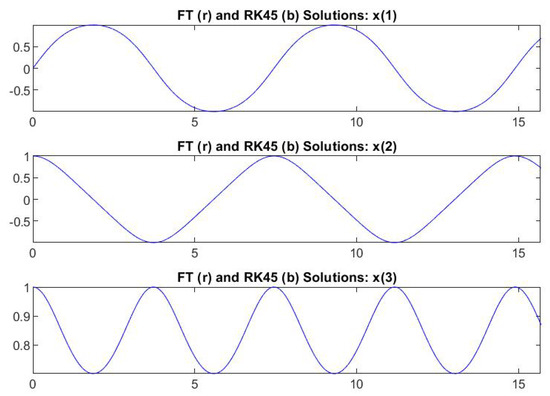
Figure 1.
Problem No1: The three components , are displayed in the order from top to bottom; FT solution is red-colored, RK solution is blue-colored. The two solutions are highly coincident at all points.
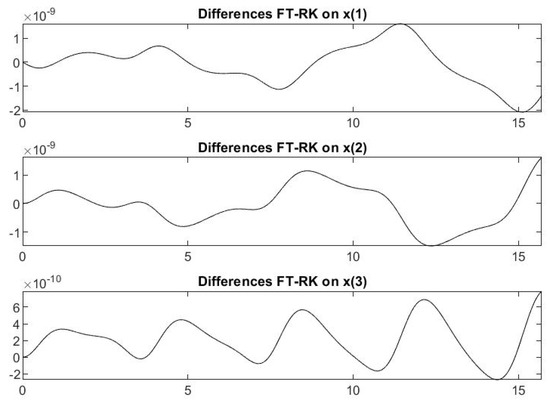
Figure 2.
Problem No1: Differences between the FT solution and the RK solution for the three components , . The two solutions coincide up to precision .
Problem No2: (Van der Pol equations) Solution interval is ;
The parameters are , , .
This system is considered to be a hard ODE and requires very small step size to determine points where the solution changes suddenly (see Figure 3). To capture this phenomenon, we use M = 30,001. The solution by ode45 has optimal step size and final solution vector .
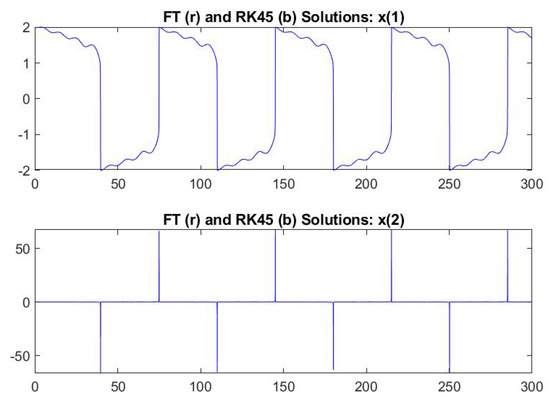
Figure 3.
Problem No2 (Van der Pol): The two components , are displayed in the order from top to bottom; FT solution is red-colored, RK solution is blue-colored. Remark the eight jumps of the solution from positive to negative values or vice versa.
With MFT = 30,001, we choose N = 501 to have hstep = 2.0 and ODE-FT finds the final value . The comparison gives AveDiffFTRK = 1.398228278980211 and MaxDiffFTRK = 0.397462807473403.
Problem No3: (Rössler’s equations) Solution interval is ;
The parameters are , , .
The third equation is nonlinear, but this problem is considered to be not numerically hard. The solution by ode45 has optimal step size and final solution vector
With MFT = 101, we choose N = 41 to have hstep = 0.005 and ODE-FT finds the final value The comparison (see Figure 4) gives
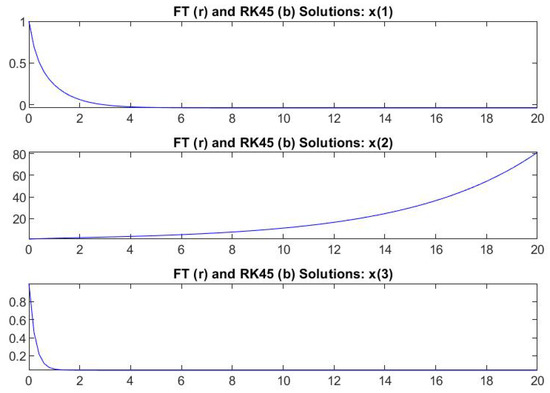
Figure 4.
Problem No3 (Rössler system):The three components , are displayed in the order from top to bottom; FT solution is red-colored, RK solution is blue-colored.
AveDiffFTRK =
MaxDiffFTRK =
Problem No4: (Lorenz’s system) Solution interval is ;
The parameters are , , .
It is well known that this nonlinear system is hard to solve numerically as it exhibits chaotic trajectories. Routine ode45 solves the Lorenz system by optimal step size and computes the final value Taking M = 30,001 the step size hstep = 1.0 is obtained with N = 1001; the found final value using ODE-FT is with AveDiffFTRK = (0.004740929429043, 0.006537238822312, 0.008150973471168) and MaxDiffFTRK = (0.149405722393993, 0.285676182819206, 0.328764820957794). See Figure 5 for the trajectories of components , and Figure 6 for the 3D representations of the solutions.
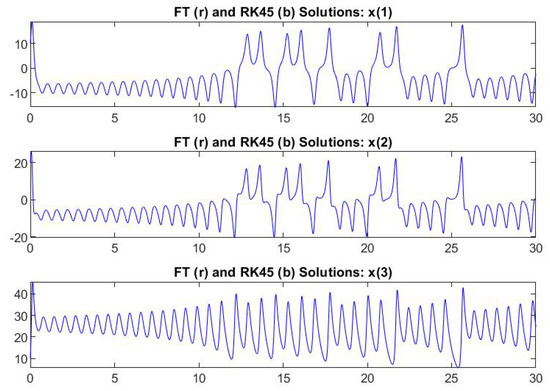
Figure 5.
Problem No4 (Lorenz system): The three components , are displayed in the order from top to bottom; FT solution is red-colored, RK solution is blue-colored. Remark that this system, with the given values of parameters, exhibits a strong sensitivity to changes in initial conditions and the numerical solutions are a famous example of chaotic trajectory.
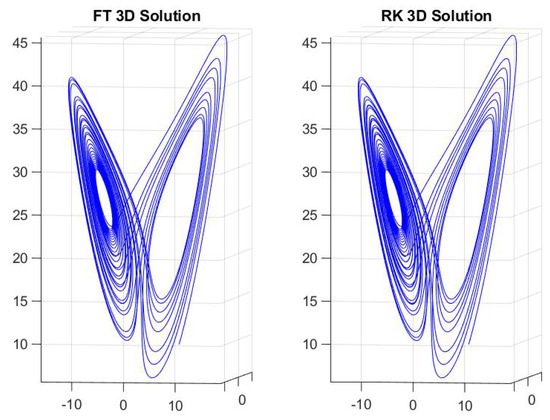
Figure 6.
Problem No4 (Lorenz system): 3D representations of the solutions obtained by ODE-FT (left) and ode45 (right); they appear to be coincident to graphical precision.
We have also solved this system by a run of ODE-FT with MFT = 30,001, N = 101 and by running the two MATLAB routines ode113 and ode15i; the resulting solutions are visualized in Figure 7 and we see that all the routines tend to generate trajectories with very different behavior for large values of time t.
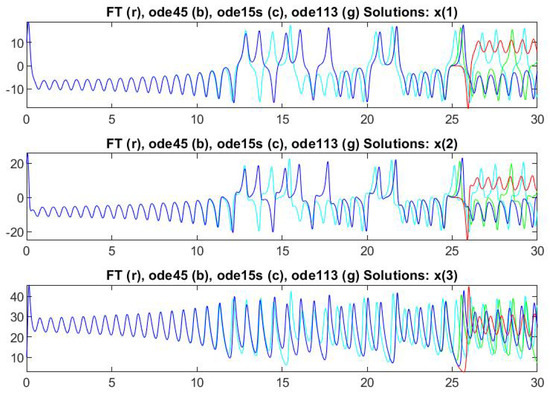
Figure 7.
Problem No4 (Lorenz system): The three components , are obtained also by routines ode15i (cyan color) and ode113 (green color); FT solution is red-colored, RK solution is blue-colored. Remark that differences between the solutions of this system are essentially due to very small differences in the solutions found by the different methods.
Problem No5: (Periodic system with period , see [24], Section 6.8): Solution interval is ;
The parameters are , ; we remark that from periodicity, the exact solution has , .
The initial condition is
With MFT = 801, N = 201 and the step size hstep = 5.0 , the final solution found by ODE-FT is , and the one computed by ode45 is ; comparatively (see Figure 8), we get
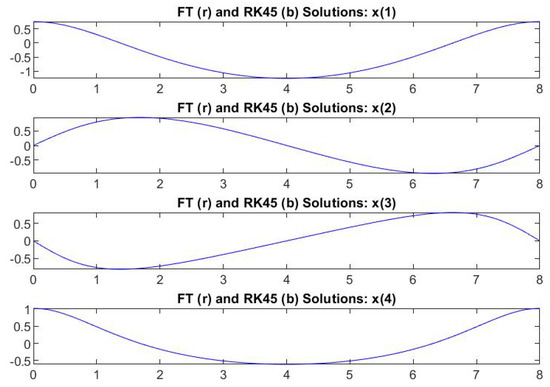
Figure 8.
Problem No5 (Periodic system): The four components , are displayed in the order from top to bottom; FT solution is red-colored, RK solution is blue-colored and the two coincide at graphical precision.
AveDiffFTRK =
MaxDiffFTRK =
5. Interval (Fuzzy) Differential Equations and F-Transform
In this section, we consider interval and fuzzy differential equations in the setting of generalized Hukuhara differentiability as described in [18,19,25]. A preliminary version of this section has been presented as a conference paper in [17].
Compact intervals of real numbers will be denoted by the usual endpoints notation , or by the midpoint notation , where is the midpoint and is the radius (half-length). The set of all compact real intervals will be denoted by .
The use of midpoint representation for intervals has been recently adopted to study several topics in the analysis of interval-valued functions, the single variable case (see [26,27] and the references therein), to which the interested reader is referred for a complete description of interval-valued generalized Hukuhara derivative (gH-derivative for short).
Given two intervals , the gH-difference is the interval (it always exists and is unique) such that
Using midpoint notation, we have and (i) is verified if and , (ii) is verified when and . If then clearly is a singleton (real number).
Please note that if are gH-differences of the same type for all , i.e., all satisfy either (i) or (ii) above, then (see [25])
An interval-valued function will be denoted by or, in equivalent midpoint notation, by , for .
We will denote by the set of fuzzy numbers, i.e. normal, fuzzy convex, upper semi-continuous and compactly supported fuzzy sets defined over the real line . The -level set of u (or simply its -cut) is defined by and, for , it is the closure of the support .
A well-known result (see [21]) allows us to represent a fuzzy number as a pair of functions , defining the endpoints of the -cuts as
We refer to functions and as the lower and upper branches of u, respectively; the two functions , are the (level-wise) midpoint and radius functions.
Given fuzzy numbers the level-wise generalized Hukuhara difference (LgH-difference for short) is the family of intervals
A fuzzy-valued function will have -cuts denoted by or, equivalently, by , for . Remark that for each , the functions defined by are properly interval-valued functions and their family (sometimes called their bunch) gives a unique and equivalent representation of F.
The following definition of generalized derivative can be applied both to interval-valued function or to the level-cuts of a fuzzy-valued function.
Definition 1
([18]). Let and h be such that .
- -
- If is an interval-valued function, its gH-derivative at is defined to be the limit, if it exists,
- -
- If is a fuzzy-valued function, its level-wise gH-derivative (LgH-derivative for short) at is defined to be the family of the gH-derivatives of , if they exist for all , i.e.,
For an interval-valued function , , when and are both differentiable, we can distinguish two cases, corresponding to (i) and (ii) of (33) (see [18])
Definition 2.
Let and with and both differentiable at . We say that
- -
- is (i)-gH-differentiable at if
- -
- F is (ii)-gH-differentiable at if
As in [18], we say that a point is an l-critical point of F if it is a critical point for the length function . A point is a switching point for the gH-differentiability of F, if in any neighborhood V of there exist points such that
type-I switch point): at (38) holds while (39) does not hold and at (39) holds and (38) does not hold, or
type-II switch point): at (39) holds while (38) does not hold and at (38) holds and (39) does not hold.
Analogous definitions can be given level-wise for a fuzzy-valued function.
5.1. Numerical Interval ODE by F-Transform
An interval differential equation (IDE) with initial condition can be written in the form
where and are intervals for all and is an interval initial value.
The gH-derivative of is denoted by
We will approximate by the iF-transforms of the two functions and on the same fuzzy partition , i.e.,
where for , using the same notation as in Section 2 with , and are the direct F-transforms of and .
From the monotonicity properties of F-transform (see [4,10] ), we know that (because for all t) and we can define the intervals . Consequently, in terms of interval arithmetic operations, we also have the following approximation of the (interval-valued) inverse F-transform of :
On the other hand, the following function is well defined:
and (here 0 stands for the interval ). The interval-valued function will play a central role in our method to solve the IDE (40).
For simplicity, define the following interval-valued function
Clearly, is a continuous interval-valued function and, from Theorem 43(i) in [18], the integral function is gH-differentiable with
The following property is proved in [17].
Proposition 8.
Then
- (1)
- is gH-differentiable with and .
- (2)
- If all the gH-differences are of the same type for all t, then is gH-differentiable with and .
Consequently, if function is generated by a fixed fuzzy partition as in (44) and , then we have the following two cases:
- (1)
- If the intervals , are such thatthen defined on as in (46) is a solution of (40).
- (2)
Remark 2.
From the properties of gH-difference, we have that
It is interesting to observe that function is (i)-gH-differentiable at all points, while function is (i)-gH-differentiable if the differences are of type (i), i.e., if , and is (ii)-gH-differentiable if the differences are of type (ii), i.e., if . Consequently, solution
has always increasing length, but the same is not true for solution
in the case where is (ii)-gH-differentiable.
Finally, let and be the approximations, respectively, of and similar to (18)–(19); we can see that the interval-valued iF-transform approximation of is useful in determining conditions for a switching point.
Indeed, if are three adjacent points of () and we suppose that no switching point exists internally to the two subintervals and (i.e., possibly, the switching is exactly at ) then the solution must satisfy
On the other hand, we have and .
Suppose now that is a switching point for the gH-differentiability of . We have two cases:
(I): (i)-to-(ii) switch: is (i)-gH-differentiable on and is (ii)-gH-differentiable on , i.e., and so that , where the difference is of type (i);
(II): (ii)-to-(i) switch: is (ii)-gH-differentiable on and is (i)-gH-differentiable on , i.e., and so that , where the difference is of type (i).
Instead, if is not a switching point and we have a type (i) solution on ; or, if we have a type (ii) solution on .
In terms of midpoint notation for intervals, we can summarize the discussion above as follows:
Types of switching points:Letbe a fuzzy partition ofand(); letbe a solution to (40) andandbe given as in (48). Then, the midpoint values satisfy
Assuming that only is eventually a switching point, we have the following four cases
- (a)
- ifis a (i)-to-(ii) switch, then
- (b)
- ifis a (ii)-to-(i) switch, then
- (c)
- ifis (i)-gH- differentiable on, then
- (d)
- ifis (ii)-gH- differentiable on, then
There are no general rules to locate a switching point. Denote by a solution of the IDE (40); if is (i)-gH-differentiable, its length will not decrease, while will not increase if is (ii)-gH-differentiable. Some authors have noticed that possibly, the sequence of switching points can be pre-defined a priori, by positioning them in the time domain of the interval differential equation; this is true, at least in principle, provided that the found solution is guaranteed to have exactly them and not other switching points, but such purely exogenous proposal is not fully convincing.
An endogenous way may be preferred, similar to control strategies, to connect the type of gH-differentiability to the evolution of the trajectory. For example, it seems reasonable to locate the switching points depending on how the solution is evolving, by fixing a lower and an upper threshold , say and requiring that for all t; then,
- (a)
- a (i)-to-(ii) switch is decided at if the following condition is reached
- (b)
- a (ii)-to-(i) switch is decided at if the following condition is reached
In some sense, the rule above will control the increasing and decreasing of “uncertainty” in an endogenous way, without any reference to the interval initial condition or to the interval-valued function .
Furthermore, we are essentially free to decide the type of differentiability at the initial point; if the initial length is such that , we can start either with a type c) or a type d) and a unique solution is then found by applying the decided switching rule.
A different purely endogenous rule can be obtained by following the increase or decrease of and trying to intercept points where the function has a local maximum (for a (i)-to-(ii) switch) or a local minimum (for a (ii)-to-(i) switch). A necessary condition can be obtained according to the following simple result:
Endogenous criteria for a switching point:Assume thatis such thatandare differentiable so that its gH-derivativecan be expressed in terms of the derivativesand. Letbe a fuzzy partition ofand letbe the iF-transform ofwith interval-valued components. Ifis a local minimum or maximum of, then.
Proof.
From the properties of F-transform, we have , and, in particular, . On the other hand, from the differentiability of and , we have for , i.e., . It follows that , i.e., . □
We then suggest the following (purely endogenous) switching rule.
Switching rule for IDE: Let be a fuzzy partition of and suppose we have computed the approximate solution of IDE (40) at the points with . Assume that is sufficiently small and .
In any case, the midpoint value is computed as .
- (1)
- If is computed according to (i)-gH-differentiability on , i.e., and if , then is assumed to be a (i)-to-(ii) switch and the next iteration is performed according to (ii)-gH-differentiability.
- (2)
- If is computed according to (ii)-gH-differentiability on , i.e., and if , then is assumed to be a (ii)-to-(i) switch and the next iteration is performed according to (i)-gH-differentiability.
In our computations, the test is performed by the condition for a small tolerance (say ).
5.2. Numerical Procedure for IDE
We are now ready to summarize the proposed procedure to solve the IDE (40) on , based on F-transform of the gH-derivative .
Chose a uniform fuzzy partition with points and basic functions .
From the properties of the F-transforms on , we have
for all , where
With the introduced notation, we solve (40) by the following procedure, assuming that no switching point exists on and is the given initial condition.
Algorithm IDE-FT: Find an approximated final value of the IDE with initial condition
- Step 1.
- Chose one of the two models (45) or (46) to start with, say for (i)-gH-differentiability (increasing length) and for (ii)-gH-differentiability (decreasing length); chose a positive tolerance to test for switching; chose , set so that for and chose a family of basic functions.
- Step 2.
- Compute . Set , .
- Step 3.
- For , the interval-valued components , are first approximated iteratively by finding as a fixed pointorand . Set the new solution interval value for as
- Step 4.
- (Test for a switching at ) If , then is declared to be a switch of gH-differentiability: if so, exchange the value of from 1 to 2 or from 2 to 1; set , . If instead , then is not a switch: in this case, update H to , without changing .
- Step 5.
- Continue from step 3 with next k, until the final point is reached.
5.3. Application to Fuzzy Differential Equations
If the fuzzy-valued function is gH-differentiable with respect to t, or if it is level-wise gH-differentiable, we can approximate its gH-derivative or its LgH-derivative by a family of interval-valued iF-transforms, parametrized with , in terms of its -cuts (consider that for all x and all j)
The F-transform of is then obtained by the family of F-transforms of the lower and upper functions and :
and, considering that each is a continuous non-negative function, we can obtain an approximation of by
Consider now an FDE in gH-derivative form
we approximate and substituting the condition into the approximation, we obtain
Integrating with given initial condition we obtain
and, at the points , defining , ,
These are (generally nonlinear) non-differential fuzzy equations of the form
where when solving for , the fuzzy numbers are determined in previous steps and the fuzzy quantity
is known.
If we search for a (i)-gH-differentiable solution, the fuzzy equation for is
if we search for a (ii)-gH-differentiable solution, the fuzzy equation for is
In terms of -cuts, they can be written (for or )
and
respectively.
6. Computational Results for Interval and Fuzzy Differential Equations
For all problems we use as the number of points where the solution is computed and as the number of nodes in the partition ; it results that the step size of the method to solve the differential equation on is .
The number of -cuts is so that the LgH-differentiable solutions are computed for all ; remark that the interval-valued solutions corresponding to the -cuts are independent each other. In particular, the family of interval-valued solutions does not always form a fuzzy-valued function.
Problem IDE1: Solution interval is ; functions a and b are and and the equations,
The fuzzy initial condition is given in terms of the -cuts of , , , with support and core .
In this case, the interval-valued solutions for the different values of form a fuzzy-valued function, i.e., the family of IDEs (parametrized with ) solve the corresponding FDE.
For the two runs with Meth = 1 and Meth = 2, the step size is h = 2.000 . The solution intervals (initial and final) and the solution intervals at the internal switching points are inserted in the following tables, for three values of .
Starting with Meth = 1, i.e., by an increasing-length solution (see Figure 9), the algorithm finds seven switching points at (see Table 1).
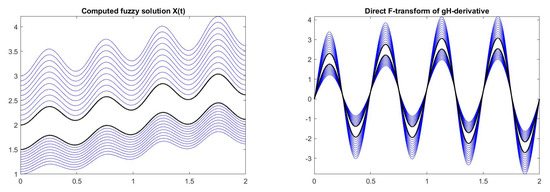
Figure 9.
Problem IDE1, Meth = 1: Level-wise LgH-differentiable solution (left) and its LgH-derivative (right). There are seven switching points which are in the same position for all level and correspond to the values of t where the gH-derivative is 0.

Table 1.
(Interval-valued problem IDE1-a): For three values of , the seven switching points corresponding to Meth=1 are given in the first column; the second column contains the interval-valued solution .
Starting with Meth = 2, i.e., by a decreasing-length solution (see Figure 10), we find the same seven switching points (but with different interval values) as reported in Table 2.
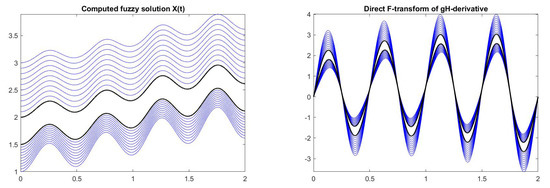
Figure 10.
Problem IDE1, Meth = 2: Level-wise LgH-differentiable solution (left) and its LgH-derivative (right). There are seven switching points which are in the same position for all level and correspond to the values of t where the gH-derivative is 0.
Table 2.
(Interval-valued problem IDE1-b): For three values of , the seven switching points corresponding to Meth=2 are given in the first column; the second column contains the interval-valued solution .
It seems remarkable that in this example, the two solutions are different, but share the same value at some of the switching points; indeed, denoting and the solution found with Meth = 1 and Meth = 2, we have that , , while the solutions are not equal at all other points.
Problem IDE2: Solution interval is ; function and two (symmetric) fuzzy numbers A, B are given with -cuts , , ; the fuzzy differential equation is, level-wise,
where and are obtained by standard interval operations and is gH-difference; the interval initial condition in terms of -cuts is , , with support and core .
In this case, the step size is h = 4.712 . The computations are performed with 11 -cuts; in the next two tables we insert the results obtained with Meth = 1 and Meth = 2 for a subset of the computed -cuts.
Remark the important fact that in this example, the switching points change in position for different values of (see Figure 11 and Figure 12 and Table 3 and Table 4. Viewing the solution function as fuzzy-valued, it is not gH-differentiable and there exist three switching regions.
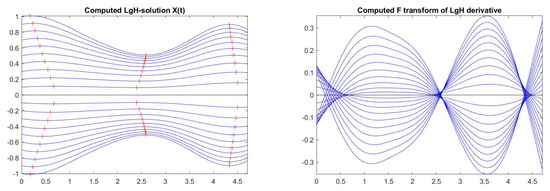
Figure 11.
Problem IDE2, Meth = 1: Level-wise LgH-differentiable solution (left) and its LgH- derivative (right). For all -cuts, there are three switching points which are not in the same position for the levels (left); on right, the LgH-derivatives are represented.
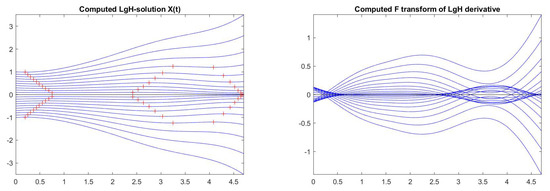
Figure 12.
Problem IDE2, Meth = 2: Level-wise LgH-differentiable solution (left) and its LgH- derivative (right). For all -cuts, there are one or three switching points which are not in the same position for the levels (left); the LgH-derivative is represented on the right picture.
Table 3.
(Interval-valued problem IDE2-a): For five values of , the three switching points corresponding to Meth=1 are given in the first column; the second column contains the interval-valued solution . If , the solution is single-valued and no switching point exists.
Table 4.
(Interval-valued problem IDE2-b): For five values of , the switching points corresponding to Meth=2 are given in the first column; the second column contains the interval-valued solution . The number of switching points changes with and if , the solution is single-valued and no switching point exists.
Problem FDE1: Solution interval is ;
where , .
The step size in this case is h = 4.000 .
The solution found with both Meth = 1 and Meth = 2 are fuzzy-valued with lengths of the -cuts all increasing (Meth = 1, Figure 13) or all decreasing (Meth = 2, Figure 14) and there are no switching points.
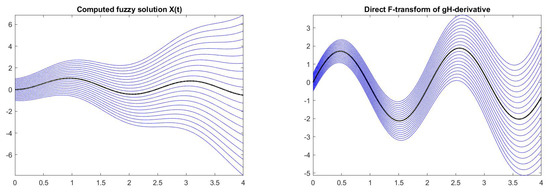
Figure 13.
Problem FDE1, Meth = 1: Fuzzy-valued gH-differentiable solution (left) and its gH- derivative (right). There are no switching points.
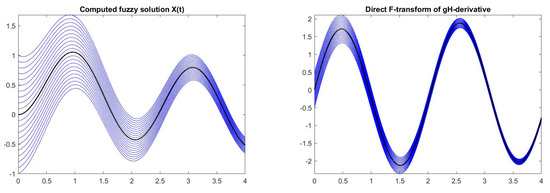
Figure 14.
Problem FDE1, Meth = 2: Fuzzy-valued gH-differentiable solution (left) and its gH-derivative (right). For all -cuts, there are no switching points.
The -cuts of the initial condition and the final fuzzy solution for Meth = 1 and Meth = 2 are inserted in Table 5.
Table 5.
(Fuzzy-valued problem FDE1): For eleven values of , the table contains the interval level-wise initial condition (column 2), the final interval value with Meth = 1 (column 3) and the final interval value with Meth = 2.
Problem FDE2: Solution interval is ;
with , . In this case, the step size is h = 1.257 .
The fuzzy solution is periodic with period . For both Meth = 1 and Meth = 2, there are three internal switching points at , where the length of is zero and the length of the solution is maximal (at ) or minimal (at .) At points and the solution coincides with the initial condition (see Figure 15 and Figure 16).
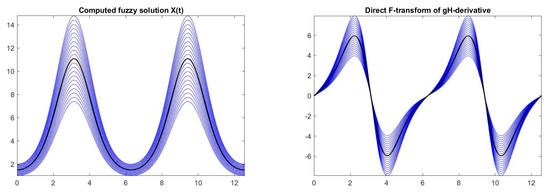
Figure 15.
Problem FDE2, Meth = 1: gH-differentiable solution (left) and its gH-derivative (right). There are three switching points, in the same position for all -cuts.
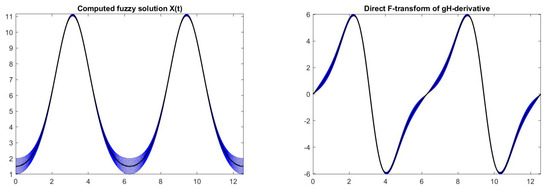
Figure 16.
Problem FDE2, Meth = 2: gH-differentiable solution (left) and its gH-derivative (right). There are three switching points, in the same position for all -cuts.
7. Concluding Comments and Further Work
In this paper, we see that the F-transform approximation setting allows good numerical procedures to solve ordinary differential equations (ODEs) and to approach the numerical solution of interval and fuzzy differential equations. The computational comparison of the proposed ODE-FT method with other well-known and well behaving numerical routines available in MATLAB, such as ode45, ode15i or ode113, positions F-transform among the most promising mathematical tools for the approximation of functions.
One of our conclusions is then that developing numerical procedures based on F-transform is a promising area of research, anticipated by some successes in recent research such as [13,14,15,16]; a complete comparison of (and between) the various F-transform-based proposed methods and our approach was not a scope of our study, where we have chosen standard well-performing routines as benchmarks and we have evaluated algorithm ODE-FT with the same and sufficiently small step size h on typical (including hard) ODEs. Two of the examples in Section 4 are also presented in [14], where the quantity MSE (mean squared error of approximate solution and the exact one) is computed. Ex4 is Example 1 in [14] and Ex5 is Example 3 in [14]. The best MSE quantities obtained by [14] and by ODE-FT are reported in Table 6:
Table 6.
For the two ODE problems in example Ex4 and Ex5, using different step-sizes, the table contains the computed MSE for the two solution-variables and , obtained by ODE-FT and Scheme II in [14].
It seems that in general, the different algorithms behave similarly, at least for the chosen step size and (consider that such h is a big one and values around or less are more adequate for a comparison, as suggested, e.g., by the values used in routine ode45 that chooses h dynamically). Possibly, more efficient and elaborated implementations of the proposed algorithms will require some additional analysis of F-transform properties to allow variable-order and/or step-size control.
As a tool for numerical solution of interval (IDEs) and fuzzy (FDEs) differential equations in terms of gH-derivative, the F-transform allows an immediate approach to handle the switching phenomenon, a still open problem in this area. This approach is obtained by the application of Equation (43) and proposition 8, which is possible because the interval-valued function offers an approximation of the interval solution at all points and not only at the discretized points , as usual in the (explicit) single- or multi-step ODE solvers.
Further research can be planned in the design and experimentation of efficient numerical procedures to solve real-world applications. In this direction, a possible improvement in the approximation can be obtained by higher-order -transform (see [11] for recent results of its properties), by introducing local polynomials or, more generally, local parametric functions in place of constant direct components (coefficients of the polynomials or parameters are then estimated by least squares). In these cases, the inverse F-transform of a function on has the form , with estimated parameters for the k-th direct component. It is worth to remark that the same integral property used in this paper for the standard F-transform is also valid for , i.e.,
It should be interesting to see if higher-order F-transform approximations will be able to generate high orders of convergence, and to obtain possibly increasing orders q by increasing d (two numeric schemes of order based on the -transform are obtained in [16]).
Similar results can be obtained by considering the discrete F-transform on a data set of points ; the integrals are substituted by summations and we have (see [10])
Finally, it is worth mentioning the possibility of applying the ideas presented in this paper to the numerical solution of other kinds of differential and integral equations, such as delay differential equations (e.g., [28]), differential equations on time scales, fractional differential equations ([29]) and implicit differential algebraic equations (DAE, see, e.g., [30,31]); a general DAE with additional constraints, on an interval is expressed in the form
In this cases, the discretization of by a fuzzy partition and the substitution of and with the functions and at points will transform the DAE into a standard feasibility problem, consisting of finding feasible solutions for the transformed system at points , .
Author Contributions
All authors contributed equally to the final version of this paper. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Acknowledgments
Davide Radi gratefully acknowledges the support of the Czech Science Foundation (GACR) under project [20-16701S] and the VŠB-TU Ostrava under the SGS project SP2020/11.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Perfilieva, I. Fuzzy Transforms: Theory and Applications. Fuzzy Sets Syst. 2006, 157, 993–1023. [Google Scholar] [CrossRef]
- Perfilieva, I. Fuzzy Transforms: A challenge to conventional transform. In Advances in Images and Electron Physics; Hawkes, P.W., Ed.; Elsevier Academic Press: Cambridge, CA, USA, 2007; Volume 147, pp. 137–196. [Google Scholar]
- Coroianu, L.; Stefanini, L. General approximation of fuzzy numbers by F-transform. Fuzzy Sets Syst. 2016, 288, 46–74. [Google Scholar] [CrossRef]
- Coroianu, L.; Stefanini, L. Properties of fuzzy transform obtained from Lp minimization and a connection with Zadeh’s extension principle. Inf. Sci. 2019, 478, 331–354. [Google Scholar] [CrossRef]
- Guerra, M.L.; Stefanini, L. Quantile and expectile smoothing based on L1-norm and L2-norm fuzzy transforms. Int. J. Approx. Reason. 2019, 107, 17–43. [Google Scholar] [CrossRef]
- Perfilieva, I.; de Baets, B. Fuzzy transforms of monotone functions with applications to image compression. Inf. Sci. 2010, 180, 3304–3315. [Google Scholar] [CrossRef]
- Perfilieva, I.; Novak, V.; Dvorak, A. Fuzzy transform in the analysis of data. Int. J. Approx. Reason. 2008, 48, 36–46. [Google Scholar] [CrossRef]
- Stefanini, L. Fuzzy Transform with Parametric LU-Fuzzy Partitions. In Computational Intelligence in Decision and Control; Ruan et Al, D., Ed.; World Scientific: Singapore, 2008; pp. 399–404. [Google Scholar]
- Stefanini, L. Fuzzy Transform and Smooth Functions. In Proceedings of the IFSA-EUSFLAT 2009 Conference, Lisbon, Portugal, 20–24 July 2009; pp. 579–584. [Google Scholar]
- Stefanini, L. F-Transform with Parametric Generalized Fuzzy Partitions. Fuzzy Sets Syst. 2011, 180, 98–120. [Google Scholar] [CrossRef]
- Zeinali, M.; Alikhani, R.; Shahmorad, S.; Bahrani, F.; Perfilieva, I. On the structural properties of Fm-transform with applications. Fuzzy Sets Syst. 2018, 342, 32–52. [Google Scholar] [CrossRef]
- Ahmad, M.Z.; Hasan, M.K.; de Baets, B. Analytical and numerical solutions of fuzzy differential equations. Inf. Sci. 2013, 236, 156–167. [Google Scholar] [CrossRef]
- Kasasbeh, H.A.L.; Perfilieva, I.; Ahmad, M.Z.; Yahya, Z.R. New Fuzzy Numerical Methods for Solving Cauchy Problems. Appl. Syst. Innov. 2018, 1, 15. [Google Scholar] [CrossRef]
- Kasasbeh, H.A.L.; Perfilieva, I.; Ahmad, M.Z.; Yahya, Z.R. New Approximation Methods Based on Fuzzy Transform for solving SODEs: I. Appl. Syst. Innov. 2018, 1, 29. [Google Scholar] [CrossRef]
- Kasasbeh, H.A.L.; Perfilieva, I.; Ahmad, M.Z.; Yahya, Z.R. New Approximation Methods Based on Fuzzy Transform for solving SODEs: II. Appl. Syst. Innov. 2018, 1, 30. [Google Scholar] [CrossRef]
- Khastan, A.; Perfilieva, I.; Alijani, Z. A new fuzzy approximation method to Cauchy problems by fuzzy transform. Fuzzy Sets Syst. 2016, 288, 75–95. [Google Scholar] [CrossRef]
- Radi, D.; Stefanini, L. Fuzzy Differential Equations by F-Transform. In Proceedings of the NAFIPS 2015 Annual Meeting, Redmond, WA, USA, 17–19 August 2015; pp. 384–389. [Google Scholar]
- Bede, B.; Stefanini, L. Generalized differentiability of fuzzy-valued functions. Fuzzy Sets Syst. 2013, 230, 119–141. [Google Scholar] [CrossRef]
- Stefanini, L.; Bede, B. Generalized Hukuhara differentiability of interval-valued functions and interval differential equations. Nonlinear Anal. 2009, 71, 1311–1328. [Google Scholar] [CrossRef]
- Stefanini, L.; Bede, B. Generalized fuzzy differentiability with LU-parametric representation. Fuzzy Sets Syst. 2014, 257, 184–203. [Google Scholar] [CrossRef]
- Bede, B. Mathematics of Fuzzy Sets and Fuzzy Logic; Springer: Berlin, Germany, 2013. [Google Scholar]
- Gomes, L.T.; de Barros, L.C.; Bede, B. Fuzzy Differential Equations in Various Approaches; Springer: Berlin, Germany, 2015. [Google Scholar]
- Stefanini, L. A generalization of Hukuhara difference and division for interval and fuzzy arithmetic. Fuzzy Sets Syst. 2010, 161, 1564–1584. [Google Scholar] [CrossRef]
- Forsythe, G.E.; Malcolm, M.A.; Moler, C.B. Computer Methods for Mathematical Computations; Prentice-Hall: Englewood Cliffs, NJ, USA, 1977. [Google Scholar]
- Stefanini, L.; Arana-Jimenez, M. Karush-Kuhn-Tucker conditions for interval and fuzzy optimization in several variables under total and directional generalized differentiability. Fuzzy Sets Syst. 2019, 362, 1–34. [Google Scholar] [CrossRef]
- Stefanini, L.; Guerra, M.L.; Amicizia, B. Interval Analysis and Calculus for Interval-Valued Functions of a Single Variable. Part I: Partial Orders, gH-derivative, Momotonicity. Axioms 2019, 8, 113. [Google Scholar] [CrossRef]
- Stefanini, L.; Sorini, L.; Amicizia, B. Interval Analysis and Calculus for Interval-Valued Functions of a Single Variable. Part II: Extremal Points, Convexity, Periodicity. Axioms 2019, 8, 114. [Google Scholar] [CrossRef]
- Tomasiello, S. An alternative use of fuzzy transform with application to a class of delay differential equations. Int. J. Comput. Math. 2017, 94, 1719–1726. [Google Scholar] [CrossRef]
- Stamova, I.M.; Stamov, G.T. Functional and Impulsive Differential Equations of Fractional Order—Qualitative Analysis and Applications; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Ascher, U.M.; Petzold, L.R. Computer Methods for Ordinary Differential Equations and Differential-Algebraic Equations; SIAM: Philadelphia, PA, USA, 1998. [Google Scholar]
- Kunkel, P.; Mehrmann, V. Differential-Algebraic Equations—Analysis and Numerical Solution; European Mathematical Society: Zürich, Switzerland, 2006. [Google Scholar]
















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).