Abstract
In this work, an algorithm is introduced for the problem of finding a common fixed point of a finite family of G-nonexpansive mappings in a real Hilbert space endowed with a directed graph G. This algorithm is a modified parallel algorithm inspired by the inertial method and the Mann iteration process. Moreover, both weak and strong convergence theorems are provided for the algorithm. Furthermore, an application of the algorithm to a signal recovery problem with multiple blurring filters is presented. Consequently, the numerical experiment shows better results compared with the previous algorithm.
1. Introduction
In the mathematical literature, the correlation between symmetry and fixed-point problems is significant, as symmetries can be viewed as fixed points of transformation. For example, consider the problem of finding the fixed points of a reflection or rotation transformation. The fixed points of a reflection transformation are the points on the reflection axis and the symmetry concerning the reflection. Similarly, the fixed points of a rotation transformation are the points that are unchanged after rotation, and so there is symmetry concerning rotation.
A fixed-point problem is one of the problems that can be applied to various real-world problems including signal recovery problems. In addition, the fixed-point problem can be considered in the context of graph theory. In 2015, Tiammee et al. [1] developed some iterative procedures for G-nonexpansive mappings in Hilbert spaces involving a directed graph G. Furthermore, Tripak [2] estimated common fixed points of G-nonexpansive mappings in a Banach space involving a directed graph G using the Ishikawa iteration process. Subsequently, there has been numerous research studies involving iteration processes; see refs. [3,4,5].
In 2015 and 2016, Anh and Hieu [6,7] proposed a parallel monotone hybrid algorithm for a finite family of quasi -nonexpansive mappings in a Banach space. Recently, Charoensawan et al. [8] presented an algorithm called the Inertial Ishikawa-type parallel algorithm (IITPA) to estimate common fixed points of a finite family of G-nonexpansive mappings in a real Hilbert space endowed with a directed graph G. This algorithm was constructed according to the parallel monotone hybrid algorithm, the Ishikawa iteration, and the inertial method. They obtained a weak convergence theorem for the algorithm. There are numerous works related to parallel algorithms; see refs. [9,10,11].
Furthermore, another approach to developing the algorithm is to achieve a higher rate of convergence. Polyak [12] suggested an inertial extrapolation to accelerate the process of solving smooth convex minimization problems. The inertial extrapolation-type algorithms have been studied by several authors; see refs. [13,14,15].
Motivated by the previous research, our study suggests Algorithm 1 with the ideas of the parallel monotone hybrid algorithm, the Mann iteration process, and the inertial method. Then we prove some weak and strong convergence results for approximating a common fixed point of a finite family of G-nonexpansive mappings in a real Hilbert space endowed with a directed graph G under some suitable conditions. Finally, we apply our results to a signal recovery problem involving multiple blurring filters and compare them to the previous algorithms.
2. Preliminaries
First, let us recall some definitions in graph theory. To begin, assume throughout this section that is a directed graph.
Definition 1.
G is said to be transitive if implies for any .
Definition 2.
Let and .
- (i)
- C is said to be dominated by v if for all ;
- (ii)
- C is said to dominate v if for all .
Next, definitions of a metric space involving a directed graph are stated. These definitions are common and often found in literature, for example, see [8].
Definition 3.
A metric space is said to be endowed with G if and , where G has no parallel edges.
Definition 4.
Let C be a nonempty subset of a Hilbert space . Assume that and is a self-mapping on C. Then S is said to be G-nonexpansive if
- (i)
- is edge-preserving, that is, for ,
- (i)
- non-increases weights of edges of G, that is, for ,
Also, we need some known lemmas as follows.
Lemma 1
([16]). Let and be sequences in satisfying and . Then the sequence converges.
Lemma 2
([17] Opial). Let C be a nonempty subset of a Hilbert space , and let be a sequence in . Assume that:
- (i)
- the sequence converges for all ;
- (ii)
- all weak sequential cluster points of belong to C.
Then converges weakly to some point in C.
Lemma 3
([18]). Let C be a nonempty closed convex subset of a Hilbert space . Assume that and that is a G-nonexpansive self-mapping on C. Given that is a sequence in C satisfying and , where and , if there is a subsequence of satisfying for all , then .
For convenience, we define condition of a family of mappings.
Definition 5.
Let C be a nonempty subset of a metric space . For each , assume that is a self-mapping on C. Then the set is said to satisfy condition if there is a non-decreasing function with , and for such that for each ,
where and .
3. Results
To begin, assume throughout this section that is a real Hilbert space endowed with a directed graph G, where is convex, and that is a G-nonexpansive mapping for all , where . Define the inertial Mann-type parallel algorithm (IMTPA) as follows.
| Algorithm 1: Inertial Mann-type parallel algorithm (IMTPA) |
|
Next, we prove some lemmas to support our main theorems. Assume that is a sequence generated by IMTPA.
Lemma 4.
Assume that:
- (i)
- ;
- (ii)
- and dominate ϰ for all .
Then the sequence is bounded, and the limit exists for all .
Proof.
Let . By assumption , we have that . Fix i for some . Since is edge-preserving, . Moreover, using the fact that is G-nonexpansive, we obtain the following result:
Note that the above inequality is true for all . By the definition of , for some . Thus,
By assumption and Lemma 1, we conclude that exists. Hence, is bounded. □
Lemma 5.
Assume that:
- (i)
- ;
- (ii)
- for all ;
- (iii)
- and dominate ϰ for all ;
- (iv)
- G is transitive and is dominated by ϰ for all .
Then for all .
Proof.
Let . From Lemma 4, we have that exists, and is bounded. This implies that and are bounded for all . Next, by using assumption and some known equality in Hilbert spaces, see equality (8) in [19], we can gain the result below for all :
By rearranging the terms, the following inequality holds for some :
Note that Inequality (2) is true for each . Then there exists such that
Since exists, by assumption , all terms on the right-hand side of the inequality approach zero as n goes to infinity. Notice that, by assumption , the term on the left-hand side of the inequality is nonnegative. Consequently,
Since , by assumption , for all . Notice that
By assumption and Equation (3), we have that . Due to the definition of , we conclude that for all ,
Now, reconsider Inequality (2) as follows:
for some . Similarly, by using Equation (4), and assumptions and , we get that for all . It remains to show that . Observe that
Since , by assumption , for all . □
From the proof of Lemma 5, it can be observed that if for all , then we can omit assumption and still obtain the same result.
Lemma 6.
Assume that:
- (i)
- ;
- (ii)
- for all ;
- (iii)
- and dominate ϰ for all ;
- (iv)
- for all .
Then for all .
3.1. Weak Convergence Theorem
In this part, we provide some weak convergence theorems for IMTPA.
Theorem 1.
Let be a sequence generated by IMTPA. Assume that:
- (i)
- ;
- (ii)
- for all ;
- (iii)
- and dominate ϰ for all ;
- (iv)
- G is transitive, and is dominated by ϰ for all ;
- (v)
- if there is a subsequence of , for some , then .
Then the sequence converges weakly to an element in .
Proof.
First notice that, by Lemmas 4 and 5, exists for all , and that for all , respectively. Next, we show that contains all weak sequential cluster points of . Let be a weak sequential cluster point of . Then there exists a subsequence such that . By assumption , we obtain that . Therefore, by Lemma 3, . Hence, by Opial’s lemma (Lemma 2), converges weakly to an element in . □
Similarly, we can replace assumption in Theorem 1 with assumption in Lemma 6 and obtain the following theorem.
Theorem 2.
Assume that:
- (i)
- ;
- (ii)
- for all ;
- (iii)
- and dominate ϰ for all ;
- (iv)
- for all ;
- (v)
- if there is a subsequence of , , then .
Then the sequence converges weakly to an element in .
Additionally, we have the following weak convergence theorem for a family of nonexpansive mappings in a real Hilbert space.
Theorem 3.
Let be a family of nonexpansive mappings on a real Hilbert space such that , and let be a sequence generated by IMTPA. Assume that:
- (i)
- ;
- (ii)
- for all .
Then the sequence converges weakly to an element in .
Proof.
First, we show that is a G-nonexpansive mapping for each . Define as a directed graph by and such that contains no parallel edges. Furthermore, is a G-nonexpansive mapping for all . Note that, by the definition of G, conditions – in Theorem 1 hold. As a consequence, converges weakly to an element in . □
3.2. Strong Convergence Theorem
In this subsection, we present some strong convergence theorems for a family of G-nonexpansive mappings in a real Hilbert space endowed with a directed graph G. To prove the theorem, the condition is needed as follows.
Theorem 4.
Assume that:
- (i)
- ;
- (ii)
- and dominate ϰ for all ;
- (iii)
- for all ;
- (iv)
- G is transitive, and is dominated by ϰ for all ;
- (v)
- satisfies the condition , where is closed.
Then the sequence converges strongly to an element in .
Proof.
From Lemma 4, we have that exists for all , and so exists. By assumption , there exists a nondecreasing function such that , for all and From Lemma 5, we get that for all . Consequently, . By the property of , we obtain that . Thus, we can find a subsequence of and a sequence in such that . Let for some . From the proof of Lemma 4, recall . Furthermore, it follows that
As a consequence,
By assumption , it is easy to see that the right-hand side of the inequality tends to zero as . Then it follows that is a Cauchy sequence in . Given the fact that is closed, there exists an such that . Since , . Note that exists. Therefore, . Hence, the sequence converges strongly to . □
Similarly, it can be noted from the proof of Theorem 4 that assumption can be replaced by assumption in Lemma 6. Accordingly, we have Theorem 5.
Theorem 5.
Assume that:
- (i)
- ;
- (ii)
- and dominate ϰ for all ;
- (iii)
- for all ;
- (iv)
- for all ;
- (v)
- satisfies the condition , where is closed.
Then the sequence converges strongly to an element in .
Similar to Theorem 3, we have the strong convergence theorem for a family of nonexpansive mappings in a real Hilbert space. Remarkably, the common fixed point set of nonexpansive mappings is closed. Thus, the following theorem is obtained.
Theorem 6.
Let be a family of nonexpansive mappings on a real Hilbert space such that , and let be a sequence generated by IMTPA. Assume that:
- (i)
- ;
- (ii)
- for all ;
- (iii)
- satisfies the condition .
Then the sequence converges strongly to an element in .
4. Application to Signal Recovery Problem
Symmetry considerations can be related to signal processing, especially when signals satisfy certain symmetries. In this section, we focus on applying IMTPA to signal recovery problems and then compare its numerical result to that of IITPA. Recall the definition of IITPA [8] shown as Algorithm 2 below.
| Algorithm 2: Inertial Ishikawa-type parallel algorithm (IITPA) |
|
Consider a signal recovery problem with various types of noises mathematically interpreted as:
where represents the initial signal, is the observed signal with noise , and () is a filter matrix for each . This problem is equivalently expressed below:
To apply Algorithms 1 and 2, this problem can be established as a common fixed-point problem as follows. Let and , where and for each . With this setting, is a nonexpansive mapping when .
Now we perform a numerical experiment on IMTPA using Matlab R2021a. First, we choose the signal size and and generate x using the uniform distribution on with k nonzero elements. Then we obtain the Gaussian matrix using the command and also the observation using white Gaussian noise with a signal-to-noise ratio SNR=40 with for all . Furthermore, select vectors and randomly and apply them to IMTPA, where , , and
for each and . An easy observation is that all conditions in Theorem 3 are satisfied. To be more specific, for all , and so assumption holds. Further, consider that . Furthermore, the assumption of Theorem 3 is also true. This guarantees that the sequence converges to a solution of such a common fixed-point problem in . In addition, for IITPA, set and for all and . Furthermore, the result is shown in Table 1. In this numerical test, we use four different numbers of nonzero elements: . From the table, notice that the CPU time (in seconds) of IMTPA is less than that of IITPA, at least five seconds in each case. Moreover, the number of iterations of IMTPA is also less than that of IITPA by at least a thousand iterations. Furthermore, we illustrate the recovery signals for both algorithms in the case where in Figure 1.

Table 1.
Numerical results for IITPA and IMTPA.
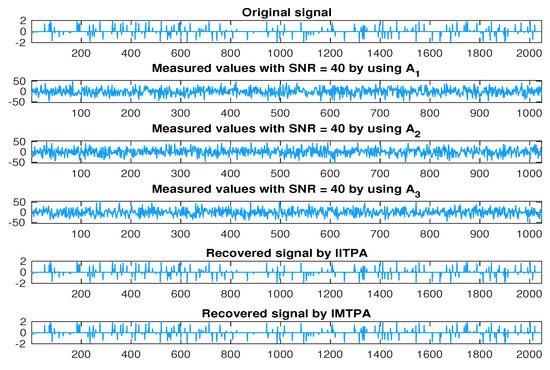
Figure 1.
The initial signal, the measurements, and the recovered signals by IITAPA and IMTPA for .
Additionally, we use the mean squared error to measure the restoration accuracy. The error of each reconstructed signal is displayed in Figure 2. As can be seen in the figure, the error of IMTPA is less than that of IITPA. Overall, the signal obtained from IMTPA in this experiment gives a better numerical result than the signal obtained from IITPA.
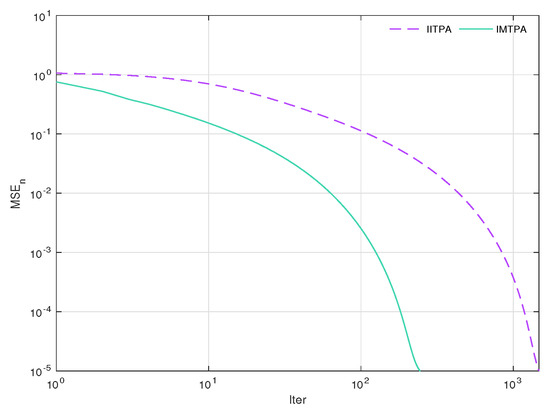
Figure 2.
Plots of MSE over the number of iterations when .
5. Conclusions
Taking everything into account, we present an algorithm called IMTPA for finding a common fixed point of a family of G-nonexpansive mappings on a Hilbert space endowed with a directed graph. This algorithm is a modified parallel algorithm with the inertial method and the Mann iteration concept. Under some extra conditions, we prove weak and strong convergence theorems for IMTPA. Lastly, we do a numerical experiment on a signal recovery problem using IMTPA and the previous algorithm called IITPA. The results show that the numerical outcome of IMTPA is better than that of IITPA. For future research, one can study results from different types of distances besides metrics. Another approach is that one can investigate a contraction in a Banach algebra instead of a Hilbert space.
Author Contributions
Writing—original draft preparation, A.K. and R.S.; writing—review and editing, P.C. and P.V. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Chiang Mai University, Faculty of Science, Chiang Mai University, and King Mongkut’s University of Technology Thonburi.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Acknowledgments
This research was supported by Chiang Mai University, Faculty of Science, Chiang Mai University, and King Mongkut’s University of Technology Thonburi.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Tiammee, J.; Kaewkhao, A.; Suantai, S. On Browder’s convergence theorem and Halpern iteration process for G-nonexpansive mappings in Hilbert spaces endowed with graphs. Fixed Point Theory Appl. 2015, 2015, 187. [Google Scholar] [CrossRef]
- Tripak, O. Common fixed points of G-nonexpansive mappings on Banach spaces with a graph. Fixed Point Theory Appl. 2016, 2016, 87. [Google Scholar] [CrossRef]
- Sridarat, P.; Suparatulatorn, R.; Suantai, S.; Cho, Y.J. Convergence analysis of SP-iteration for G-nonexpansive mappings with directed graphs. Bull. Malays. Math. Sci. Soc. 2019, 42, 2361–2380. [Google Scholar] [CrossRef]
- Thianwan, T.; Yambangwai, D. Convergence analysis for a new two-step iteration process for G-nonexpansive mappings with directed graphs. J. Fixed Point Theory Appl. 2019, 21, 44. [Google Scholar] [CrossRef]
- Yambangwai, D.; Aunruean, S.; Thianwan, T. A new modified three-step iteration method for G-nonexpansive mappings in Banach spaces with a graph. Numer. Algorithms 2020, 84, 537–565. [Google Scholar] [CrossRef]
- Anh, P.K.; Hieu, D.V. Parallel and sequential hybrid methods for a finite family of asymptotically quasi ϕ-nonexpansive mappings. J. Appl. Math. Comput. 2015, 48, 241–263. [Google Scholar] [CrossRef]
- Anh, P.K.; Hieu, D.V. Parallel hybrid iterative methods for variational inequalities, equilibrium problems, and common fixed-point problems. Vietnam J. Math. 2016, 44, 351–374. [Google Scholar] [CrossRef]
- Charoensawan, P.; Yambangwai, D.; Cholamjiak, W.; Suparatulatorn, R. An inertial parallel algorithm for a finite family of G-nonexpansive mappings with application to the diffusion problem. Adv. Differ. Equ. 2021, 2021, 453. [Google Scholar] [CrossRef]
- Cholamjiak, W.; Khan, S.A.; Yambangwai, D.; Kazmi, K.R. Strong convergence analysis of common variational inclusion problems involving an inertial parallel monotone hybrid method for a novel application to image restoration. Rev. R. Acad. Cienc. Exactas Fís. Nat. Ser. A Mat. RACSAM 2020, 114, 99. [Google Scholar] [CrossRef]
- Cholamjiak, P.; Suantai, S.; Sunthrayuth, P. An explicit parallel algorithm for solving variational inclusion problem and fixed-point problem in Banach spaces. Banach J. Math. Anal. 2020, 14, 20–40. [Google Scholar] [CrossRef]
- Suantai, S.; Kankam, K.; Cholamjiak, P.; Cholamjiak, W. A parallel monotone hybrid algorithm for a finite family of G-nonexpansive mappings in Hilbert spaces endowed with a graph applicable in signal recovery. Comput. Appl. Math. 2021, 40, 145. [Google Scholar] [CrossRef]
- Polyak, B.T. Some methods of speeding up the convergence of iteration methods. USSR Comput. Math. Math. Phys. 1964, 4, 1–17. [Google Scholar] [CrossRef]
- Beck, A.; Teboulle, M. A fast iterative shrinkage-thresholding algorithm for linear inverse problems. SIAM J. Imaging Sci. 2009, 2, 183–202. [Google Scholar] [CrossRef]
- Kitkuan, D.; Kumam, P.; Martínez-Moreno, J.; Sitthithakerngkiet, K. Inertial viscosity forward-backward splitting algorithm for monotone inclusions and its application to image restoration problems. Int. J. Comput. Math. 2020, 97, 482–497. [Google Scholar]
- Nesterov, Y. A method for solving the convex programming problem with convergence rate O(1/k2). Dokl. Akad. Nauk SSSR 1983, 269, 543–547. [Google Scholar]
- Auslender, A.; Teboulle, M.; Ben-Tiba, S. A logarithmic-quadratic proximal method for variational inequalities. Comput. Optim. Appl. 1999, 12, 31–40. [Google Scholar] [CrossRef]
- Bauschke, H.H.; Combettes, P.L. Convex Analysis and Monotone Operator Theory in Hilbert Spaces; CMS Books in Mathematics; Springer: New York, NY, USA, 2011. [Google Scholar]
- Suantai, S.; Donganont, M.; Cholamjiak, W. Hybrid methods for a countable family of G-nonexpansive mappings in Hilbert spaces endowed with graphs. Mathematics 2019, 7, 936. [Google Scholar] [CrossRef]
- Gibali, A.; Thong, D.V. Tseng type methods for solving inclusion problems and its applications. Calcolo 2018, 55, 49. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).