
Approximate Solutions for a Class of Predator–Prey Systems with Nonstandard Finite Difference Schemes




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Preliminaries
- (i)
- The trivial equilibrium ;
- (ii)
- An interior equilibrium satisfying and ;
- (i)
- In the discrete derivatives of and a non-negative function substitutes the step size h, such that
- (ii)
- Nonlinear terms in the right hand side of (1) are approximated in a nonlocal way, that is to say, by an appropriate function of some points in the mesh.
3. Development of New NSFD Schemes
3.1. Scheme 1
3.2. Scheme 2
4. Positivity
5. Elementary Stability
- (i)
- ;
- (ii)
- ;
- (iii)
- .
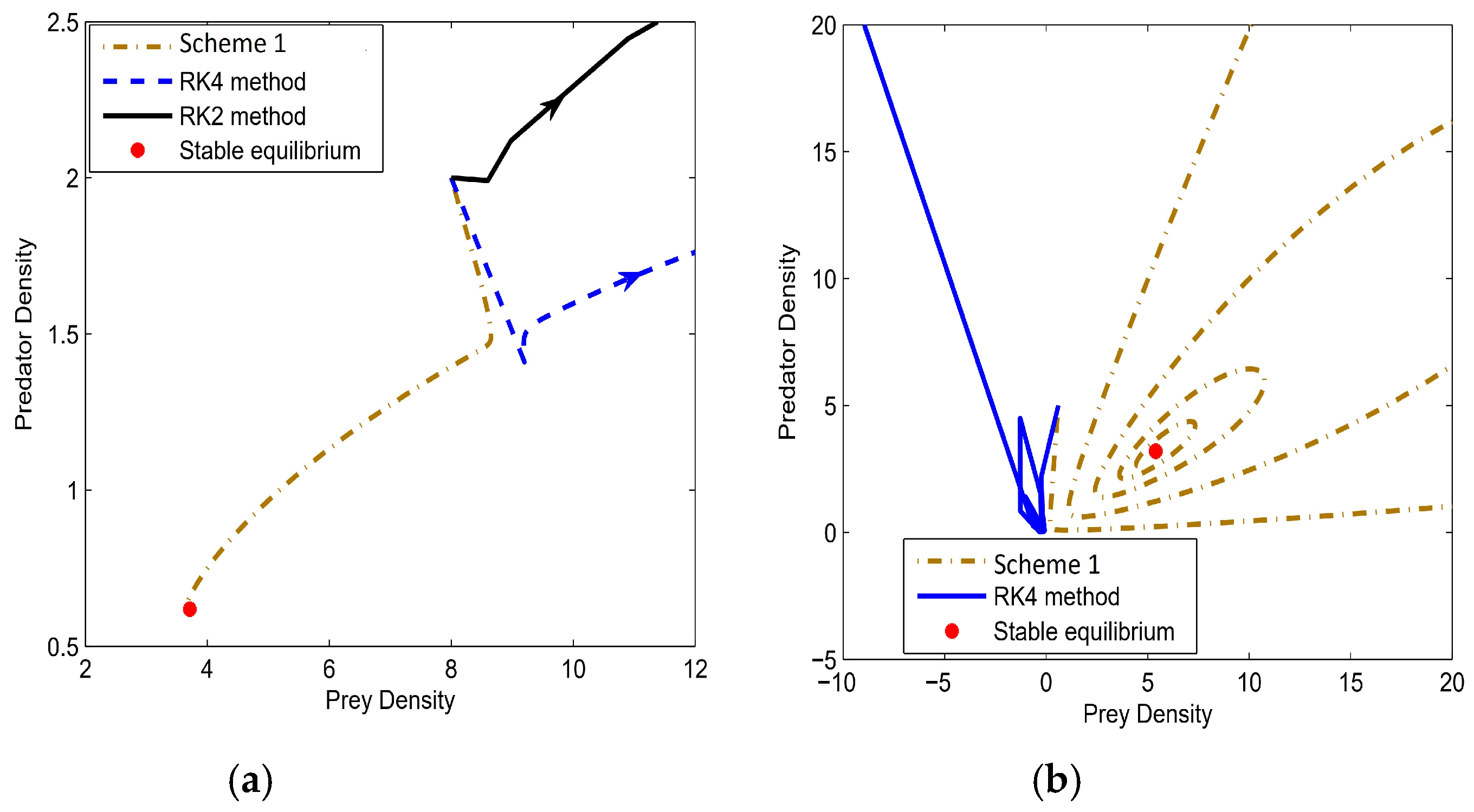
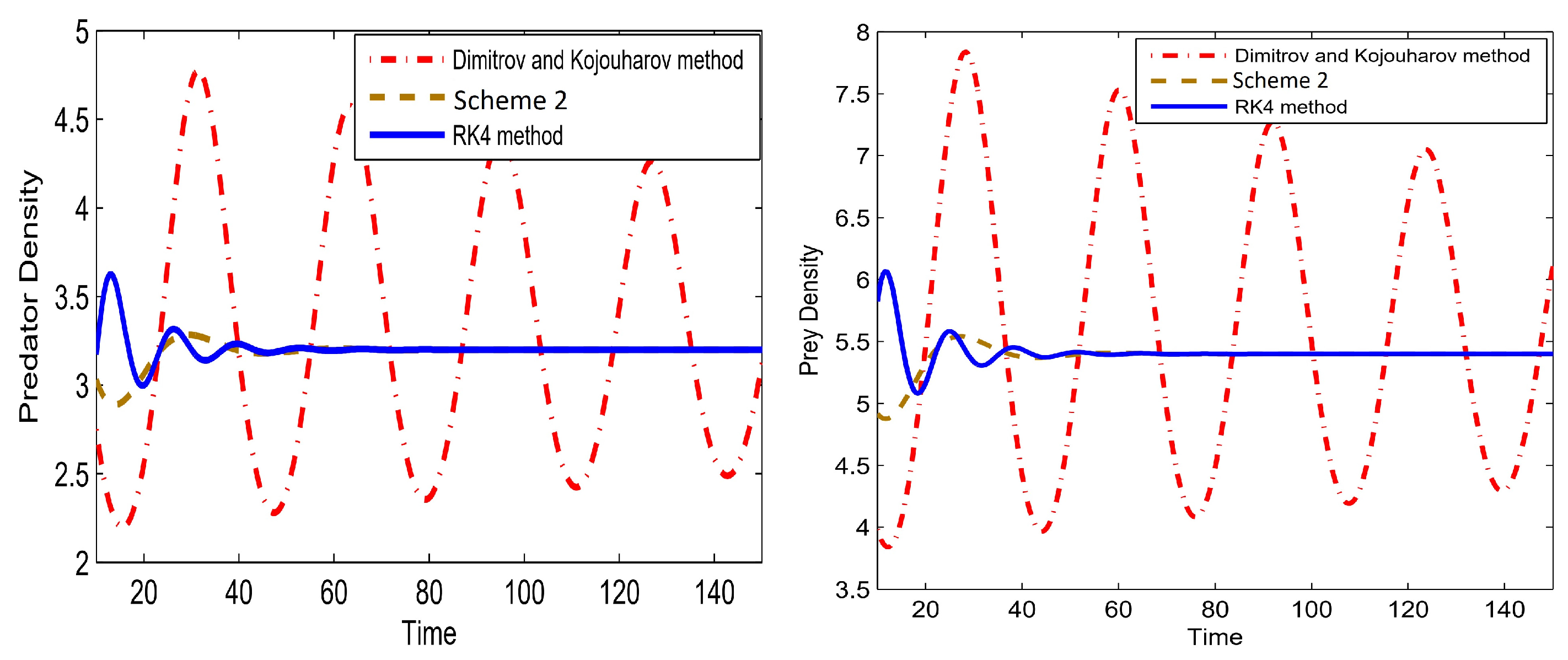
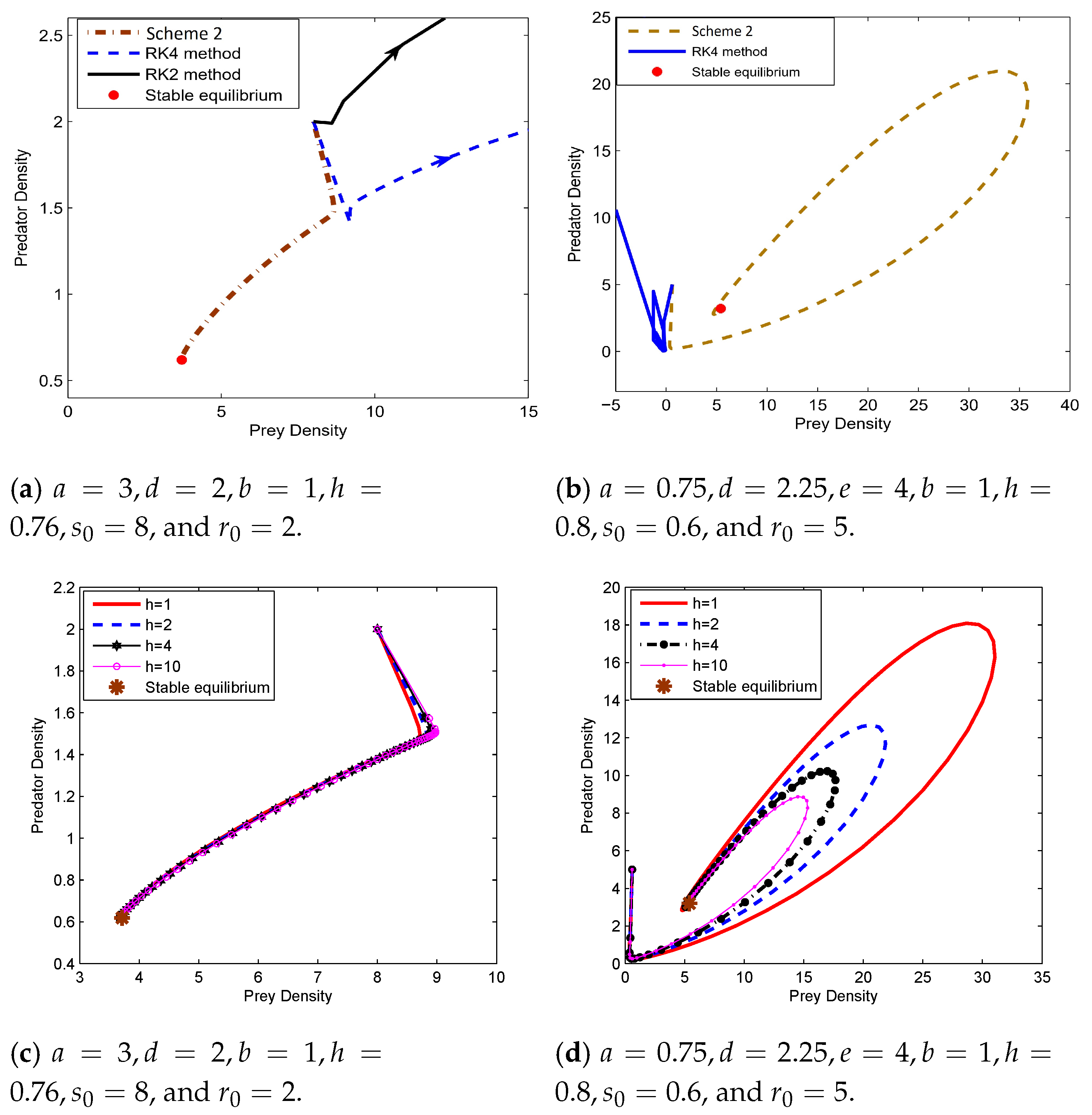
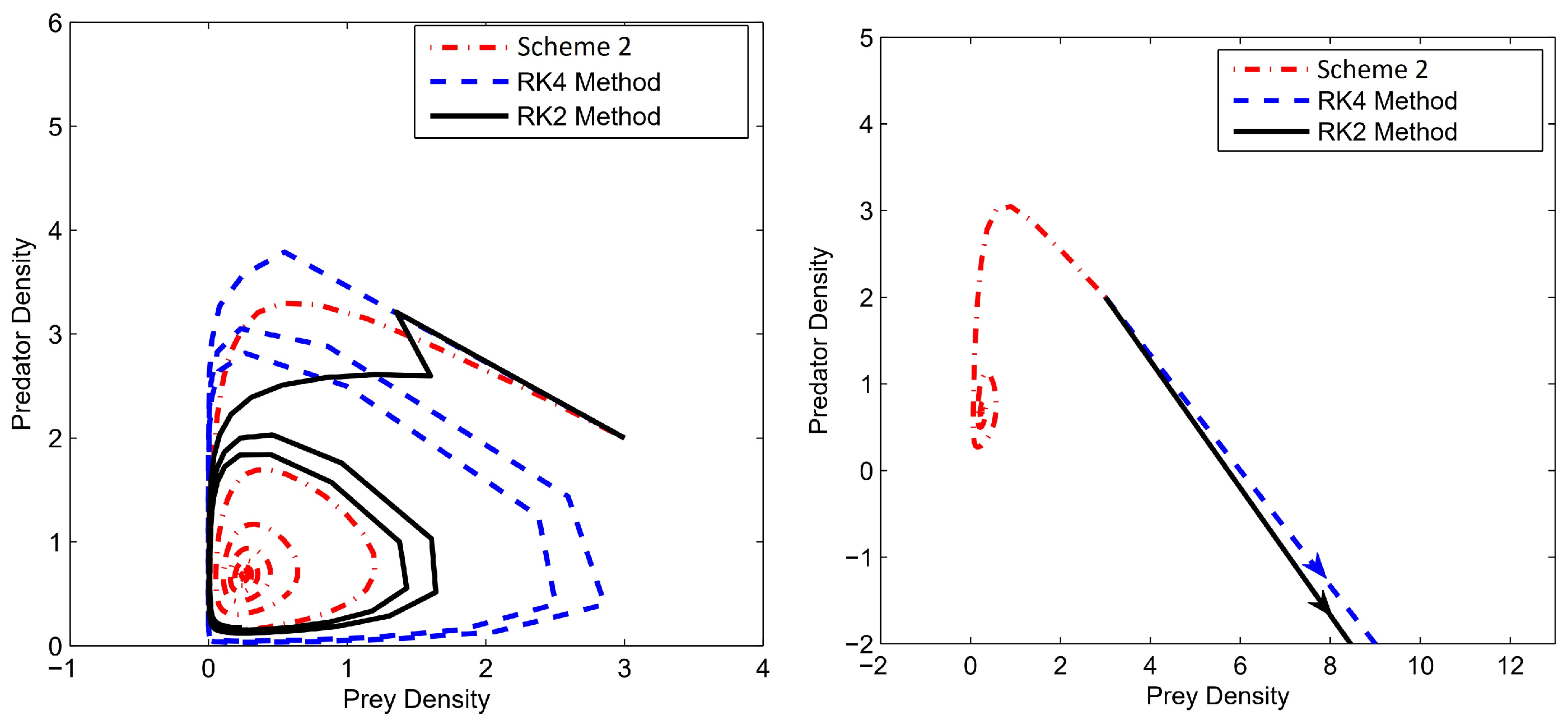
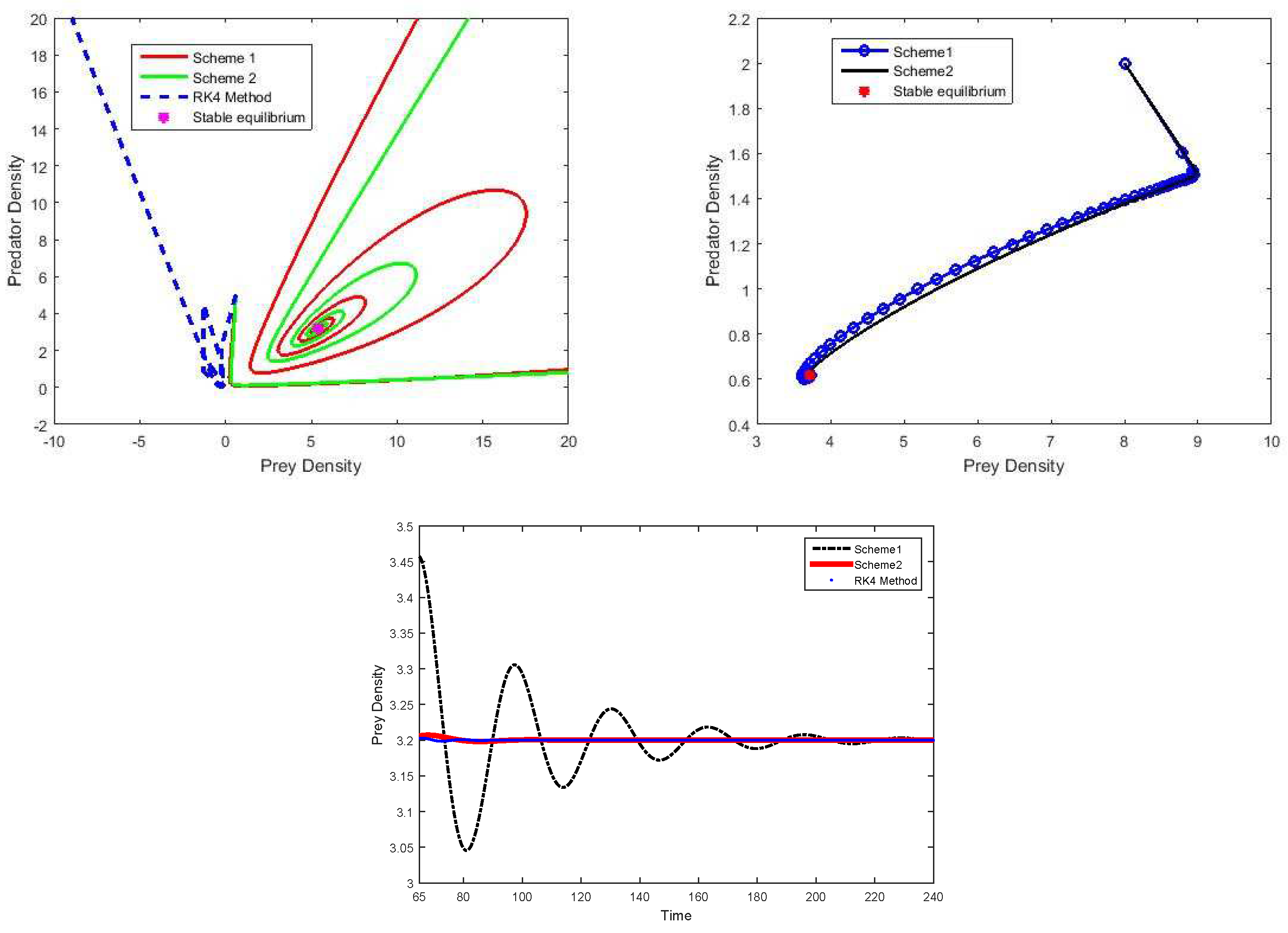
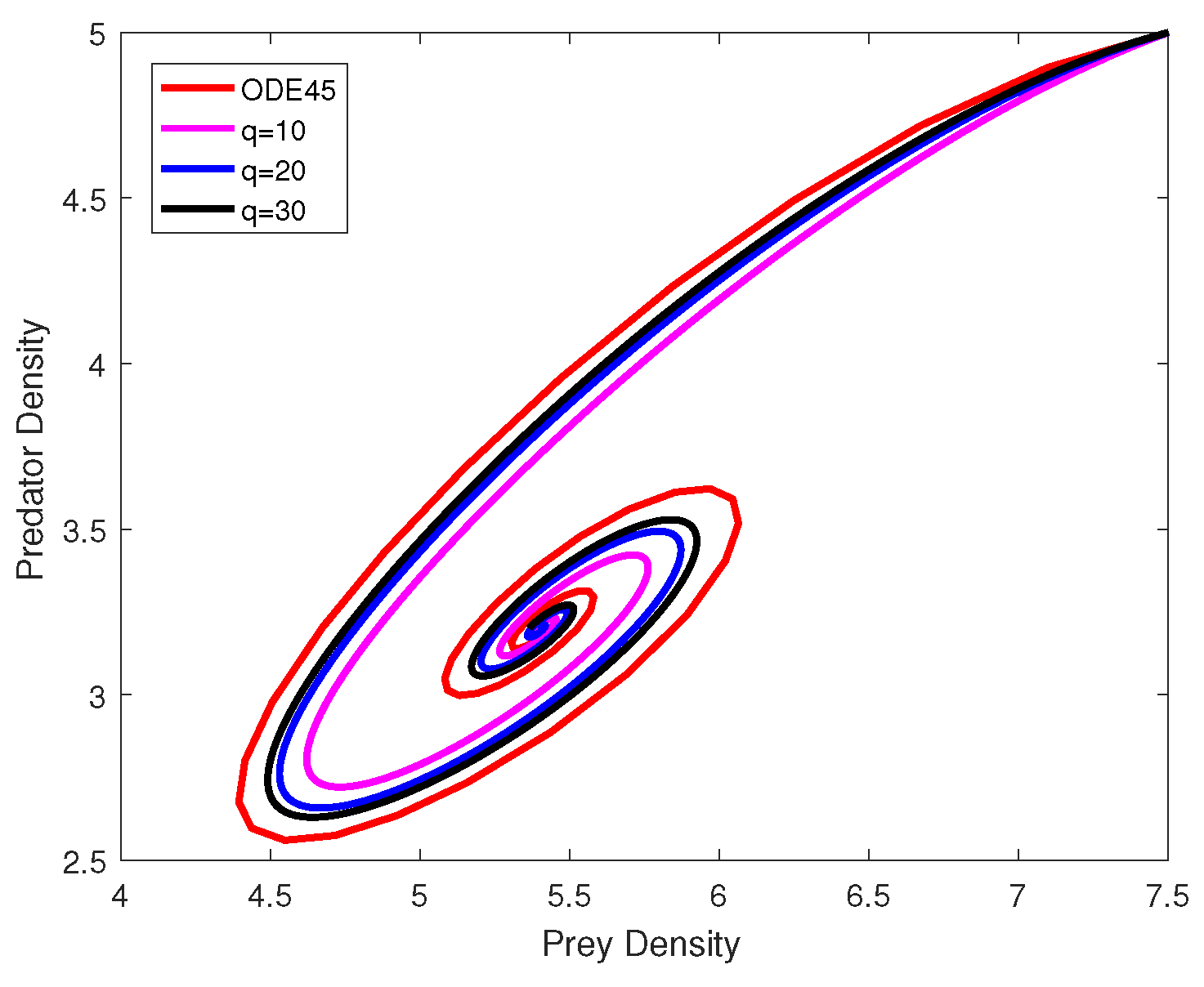
6. Numerical Results
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Brauer, F.; Castillo-Chavez, C. Mathematical Models in Population Biology and Epidemiology; Springer: New York, NY, USA, 2001. [Google Scholar]
- Berge, T.; Lubuma, J.M.S.; Tasse, A.J.O.; Tenkam, H.M. Dynamics of host-reservoir transmission of Ebola with spillover potential to humans. Electron. J. Qual. Theory Differ. Equ. 2018, 14, 1–32. [Google Scholar]
- Dimitrov, D.T.; Kojouharov, H.V. Nonstandard finite difference methods for predator-prey mpdels with general functional response. Math. Comput. Simul. 2008, 78, 1–11. [Google Scholar] [CrossRef]
- Murry, J.D. Mathematical Biology; Springer: New York, NY, USA, 1989. [Google Scholar]
- Dimitrov, D.T.; Kojouharov, H.V. Positive and elementary stable nonstandard numerical methods with applications to predator-prey models. J. Comput. Appl. Math. 2006, 189, 98–108. [Google Scholar] [CrossRef] [Green Version]
- Dimitrov, D.T.; Kojouharov, H.V. Nonstandard numerical methods for a class of predator-prey models with predator interference. Electron. J. Differ. Equ. 2007, 15, 67–75. [Google Scholar]
- Dimitrov, D.T.; Kojouharov, H.V. Stability-Preserving finite-difference methods for general multi-dimensional autonomous dynamical system. Int. J. Numer. Anal. Model. 2007, 4, 282–292. [Google Scholar]
- Dimitrov, D.T.; Kojouharov, H.V. Dynamically consistent numerical methods for general productive–destructive systems. J. Differ. Equ. Appl. 2011, 17, 1721–1736. [Google Scholar] [CrossRef]
- Wood, D.T.; Dimitrov, D.T.; Kojouharov, H.V. A nonstandard finite difference method for n-dimensional productive–destructive systems. J. Differ. Equ. Appl. 2015, 21, 240–254. [Google Scholar] [CrossRef]
- Wood, D.T.; Kojouharov, H.V. A class of nonstandard numerical methods for autonomous dynamical systems. Appl. Math. Lett. 2015, 50, 78–82. [Google Scholar] [CrossRef]
- Dumont, Y.; Chiroleu, F.; Domerg, C. On a temporal model for the Chikungunya disease: Modeling theory and numerics. Math. Biosci. 2008, 213, 80–91. [Google Scholar] [CrossRef]
- Dang, Q.A.; Hoang, M.T. Lyapunov direct method for investigating stability of nonstandard finite difference schemes for metapopulation models. J. Differ. Equ. Appl. 2018, 24, 15–47. [Google Scholar] [CrossRef] [Green Version]
- Gumel, A.B.; Moghadas, S.M.; Mickens, R.E. Effect of a preventive vaccine on the dynamics of HIV transmission. Commun. Nonlinear. Sci. Numer. Simul. 2004, 9, 649–659. [Google Scholar] [CrossRef]
- Martiradonna, A.; Colonna, G.; Diele, F. GeCo: Geometric Conservative non-standard schemes for biochemical systems. Appl. Numer. Math. 2020, 155, 38–57. [Google Scholar] [CrossRef]
- Juraev, D.A. The Cauchy problem for matrix factorization of the Helmholtz equation in an unbounded domain. Sib. Electron. Math. Rep. 2017, 14, 752–764. [Google Scholar]
- Juraev, D.A. The Cauchy problem for matrix factorization of the Helmholtz equation in a bounded domain. Sib. Electron. Math. Rep. 2018, 15, 11–20. [Google Scholar]
- Shokri, A.; Vigo-Aguiar, J.; Mehdizadeh Khalsaraei, M.; Garcia-Rubio, R. A new implicit six-step P-stable method for the numerical solution of Schrödinger equation. Int. J. Comput. Math. 2020, 97, 802–817. [Google Scholar] [CrossRef]
- Shokri, A.; Vigo-Aguiar, J.; Mehdizadeh Khalsaraei, M.; Garcia-Rubio, R. A new four-step P-stable Obrechkoff method with vanished phase-lag and some of its derivatives for the numerical solution of radial Schrödinger equation. J. Comput. Appl. Math. 2019, 354, 569–586. [Google Scholar] [CrossRef]
- Karapinar, E.; Fulga, A. Fixed point on convex b-metric space via admissible mappings. TWMS J. Pure Appl. Math. 2021, 12, 254–264. [Google Scholar]
- Kong, F.; Sakthivel, R. Uncertain external perturbation and mixed time delay impact on fixed-time synchronization of discontinuous neutral-type neural networks. Appl. Comput. Math. 2021, 20, 290–312. [Google Scholar]
- Benitoa, J.J.; Garcíaa, A.; Gaveteb, L.; Negreanuc, M.; Ureñaa, F.; Vargasc, A.M. Convergence and numerical simulations of prey-predator interactions via a meshless method. Appl. Numer. Math. 2021, 161, 333–347. [Google Scholar] [CrossRef]
- Benitoa, J.J.; Garcíaa, A.; Gaveteb, L.; Negreanuc, M.; Ureñaa, F.; Vargasc, A.M. On the numerical solution to a parabolic-elliptic system with chemotactic and periodic terms using Generalized Finite Differences. Appl. Numer. Math. 2020, 113, 181–190. [Google Scholar] [CrossRef]
- Benitoa, J.J.; Garcíaa, A.; Gaveteb, L.; Negreanuc, M.; Ureñaa, F.; Vargasc, A.M. Solving a chemotaxis–haptotaxis system in 2D using Generalized Finite Difference Method. Comput. Math. Appl. 2020, 80, 762–777. [Google Scholar] [CrossRef]
- Wood, D.T.; Kojouharov, H.V.; Dimitrov, D.T. Universal approaches to approximate biological systems with nonstandard finite difference methods. Math. Comput. Simul. 2017, 133, 337–350. [Google Scholar] [CrossRef]
- Marian, D. Semi-Hyers–Ulam–Rassias stability of the convection partial differential equation via Laplace transform. Mathematics 2021, 22, 2980. [Google Scholar] [CrossRef]
- Mehdizadeh Khalsaraei, M.; Shokri, A.; Ramos, H.; Heydari, S. A positive and elementary stable nonstandard explicit scheme for a mathematical model of the influenza disease. Math. Comput. Simul. 2021, 182, 397–410. [Google Scholar] [CrossRef]
- Mickens, R.E. Nonstandard Finite Difference Models of Differential Equations; World Scientific: Singapore, 1994. [Google Scholar]
- Mickens, R.E. Advances in the Applications of Nonstandard Finite Difference Schemes; Wiley-Interscience: Singapore, 2005. [Google Scholar]
- Mickens, R.E. A nonstandard finite-difference scheme for the Lotka-Volterra system. Appl. Numer. Math. 2003, 45, 309–314. [Google Scholar] [CrossRef]
- Mickens, R.E.; Jordan, P.M. A positivity-preserving nonstandard finite difference scheme for the damped wave equation. Numer. Methods Partial Differ. Equ. 2004, 20, 639–649. [Google Scholar] [CrossRef]
- Mickens, R.E. Calculation of denominator functions for nonstandard finite difference schemes for differential equations satisfying a positivity condition. Numer. Methods Partial Differ. Equ. 2007, 23, 672–691. [Google Scholar] [CrossRef]
- Obaid, H.A.; Ouifki, R.; Patiar, K.C. An Unconditionally Stable Nonstandard Finite Difference Method Applied To a Mathematical Model of HIV Infection. J. Appl. Math. Comput. Sci. 2013, 23, 357–372. [Google Scholar] [CrossRef] [Green Version]
- Zibaei, S.; Namjoo, M. A NSFD scheme for Lotka-Volterra food web model. Iran. J. Sci. Technol. Trans. A Sci. 2014, 38, 399–414. [Google Scholar]
- Anguelov, R.; Lubuma, J.M.-S. Contributions to the mathematics of the nonstandard finite difference method and applications. Numer. Methods Partial Differ. Equ. 2001, 17, 518–543. [Google Scholar] [CrossRef]
- Anguelov, R.; Dumont, Y.; Lubuma, J.S.; Shillor, M. Dynamically consistent nonstandard finite difference schemes for epidemiological models. J. Comput. Appl. Math. 2014, 255, 161–182. [Google Scholar] [CrossRef]
- Anguelov, R.; Berge, T.; Chapwanya, M.; Djoko, J.; Kama, P.; Lubuma, J.S.; Terefe, Y. Nonstandard finite difference method revisited and application to the Ebola virus disease transmission dynamics. J. Differ. Equ. Appl. 2020, 26, 818–854. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nonlaopon, K.; Mehdizadeh Khalsaraei, M.; Shokri, A.; Molayi, M. Approximate Solutions for a Class of Predator–Prey Systems with Nonstandard Finite Difference Schemes. Symmetry 2022, 14, 1660. https://doi.org/10.3390/sym14081660
Nonlaopon K, Mehdizadeh Khalsaraei M, Shokri A, Molayi M. Approximate Solutions for a Class of Predator–Prey Systems with Nonstandard Finite Difference Schemes. Symmetry. 2022; 14(8):1660. https://doi.org/10.3390/sym14081660
Chicago/Turabian StyleNonlaopon, Kamsing, Mohammad Mehdizadeh Khalsaraei, Ali Shokri, and Maryam Molayi. 2022. "Approximate Solutions for a Class of Predator–Prey Systems with Nonstandard Finite Difference Schemes" Symmetry 14, no. 8: 1660. https://doi.org/10.3390/sym14081660
APA StyleNonlaopon, K., Mehdizadeh Khalsaraei, M., Shokri, A., & Molayi, M. (2022). Approximate Solutions for a Class of Predator–Prey Systems with Nonstandard Finite Difference Schemes. Symmetry, 14(8), 1660. https://doi.org/10.3390/sym14081660