1. Introduction
Remote sensing is a technology that enables us to gather information about the Earth’s surface and atmosphere without physical contact. It has revolutionized our ability to study and monitor the Earth’s surface, providing scientists, researchers, and decision makers with unprecedented amounts of data and insights into our planet [
1].
In this context, three remote sensing platforms come into focus that include the recently launched Landsat 9 satellite and its near-twin, Landsat 8, which capture multispectral images of the Earth, and the Terra satellite, which carries various scientific instruments including the high-resolution imaging instrument known as the Advanced Spaceborne Thermal Emission and Reflection Radiometer (ASTER).
These instruments have been key providers of data used to create a wide variety of data products, including those used for vegetation analysis and land cover classification, which are important for monitoring changes in plant growth, biomass, and water content, and a wide range of environmental and societal applications. The green and red bands are particularly useful for distinguishing between different types of vegetation and for estimating vegetation cover and productivity, while the near-infrared band is sensitive to changes in vegetation water content and can be used to monitor drought conditions, soil moisture, and plant stress. Additionally, the near-infrared band is commonly used in vegetation indices such as the normalized difference vegetation index (NDVI), which can provide a measure of vegetation health and productivity [
2].
To advance our understanding of the Earth’s surface and its evolution over time, the availability of data from multiple sensors with different spectral bands and resolutions is indispensable. Comparing the performance of these bands across ASTER, L8 OLI, and L9 OLI provides an opportunity to gauge the agreement among the sensors, offering users a comprehensive view of the Earth’s surface for various applications, including agriculture, forestry, land-use planning, and natural resource management.
However, a challenge arises in ensuring that changes in the radiometric responses of the sensors do not impact efforts to combine data from two sensors. The NIR bands are a good example of this since NDVI is widely used by the vegetation community, and the NDVI derived from ASTER [
3] will differ from the OLI values simply because of their spectral differences. Users can correct for such effects, but corrections become far more complicated if there are radiometric calibration differences between various sensors. The fact that NDVI relies on multiple bands, as do almost all applications, requires developing techniques that can evaluate how all of the bands from all of the sensors can be evaluated on an absolute scale as well as relative to each other to help determine possible biases in data products.
This paper addresses this challenge through an intercomparison study, concentrating on the radiometric performance and agreement among ASTER, L8 OLI, and L9 OLI sensors. Leveraging data from the Radiometric Calibration Network (RadCalNet), this work focuses on the spectral bands pivotal for vegetation analysis and land cover classification. It meticulously evaluates data quality, uncertainties, and the key factors influencing these aspects.
It is worth noting that the Terra platform underwent two key orbital changes in 2020 and 2022. The Terra mission maintained a very narrow two-minute range for its equator crossing through the use of orbital inclination maneuvers. The last of the maneuvers took place in the spring of 2020 to conserve fuel for end-of-life maneuvers; since then, the platform’s crossing time has been drifting to times earlier in the day. Fuel is still available to perform debris-avoidance maneuvers, but the crossing time changed for the platform from the original 10:30 to 10:15 in September 2022 and to 10:00 in September 2023. The 10:15 a.m. time reached in 2022 prompted the Terra project team to perform an orbit-lowering maneuver in October 2022 from the 705 km altitude of the Earth Sciences Constellation. The lowering of the altitude reduces possible crossings with other platforms, helping to maintain the safety of other platforms while preserving fuel for Terra’s eventual de-orbit burns. Thus, one goal of this paper is to assess whether ASTER has experienced a discernible impact on its radiometric performance as a result of the orbital changes experienced by the Terra platform.
The approach used in the current work is a vicarious calibration relying on RadCalNet. RadCalNet has been used extensively in recent years for vicarious calibration. SI-traceable intercalibration methodology in the Landsat 8 and 9 OLI instruments using RadCalNet sites has been provided [
4]. A combination of RadCalNet sites as a common reference was used for an intercomparison of Landsat OLI and JPSS VIIRS [
5]. Vicarious calibration of SuperView-1 satellite sensor using RadCalNet TOA reflectance product has been investigated [
6]. A reliable, high-precision radiometric calibration coefficient for the GF-7 satellite sensor has been obtained using RadCalNet’s Baotou site [
7]. Calibration techniques used for the DESIS instrument with a special emphasis on vicarious calibration over RadCalNet’s calibration sites have been described elsewhere [
8].
The primary requirement of RadCalNet is that the TOA reflectances be SI-traceable with well-documented uncertainties. The automated nature of the data collection means that data will typically be available for any sensor viewing the sites, and the TOA reflectance from RadCalNet is a useful tool for evaluating the absolute radiometric calibration of on-orbit sensors as well as high-flying airborne sensors [
9]. An additional benefit of RadCalNet data products with SI traceability is that they allow for different satellite sensors to be compared to each other using RadCalNet sites even when the sensors do not have identical spectral bands. Intercomparisons using RadCalNet sites also do not require coincident (or even near-coincident) imaging. Their SI traceability, with a well-understood and peer-reviewed error budget, allows RadCalNet sites to be used as common references [
10].
RadCalNet data offer a unique opportunity to compare the radiometric performance of Landsat OLI to Terra’s ASTER. This work also provides an evaluation of the Railroad Valley and Gobabeb sites of RadCalNet for sensors at a 15 m spatial resolution to help fill the gap between results from past studies with 10 m and 30 m spatial resolutions [
4,
11,
12,
13,
14,
15].
The access to L8 OLI data allows for an additional analysis of the ASTER-to-L9 OLI comparison to determine the impacts of any site-dependent factors. Past comparisons between ASTER and L8 OLI indicate that the two sensors agree to within the absolute uncertainties of RadCalNet and the sensors themselves [
16,
17]. It is known that L8 OLI and L9 OLI data should agree to better than a few percent based on data collected during an underfly of Landsat 8 by Landsat 9 [
18,
19]. Thus, the ASTER-to-L9 OLI comparison discussions below benefit from understanding the RadCalNet data through OLI. The key to this multi-sensor approach is that the RadCalNet data do not need to coincide with all three sensors in order for this approach to be successful.
The differences and similarities in the behavior of the calibration of the two sensors are assessed to show whether the Railroad Valley and Gobabeb RadCalNet sites are suitable for sensors with spatial resolutions as small as 15 m while demonstrating that the recent update to the ASTER radiometric calibration provides results that agree with L8 OLI and L9 OLI to well within the absolute radiometric uncertainties of both sensors. It is important to note that we omitted the results obtained from short-wave infrared (SWIR) bands in our study. This decision stemmed from our study’s primary emphasis on the visible and near-infrared (VNIR) bands. In recent years, ASTER sensor data were limited to Bands 1, 2, and 3N, and access to SWIR data for the entire 10-year period we considered was not readily available. Consequently, our analysis was centered on the VNIR bands in which we had sufficient data to conduct a comprehensive assessment.
2. Materials and Methods
In this section, we present a comprehensive overview of the materials and methods utilized in this study. We delve into the technical details of the sensors employed, describe the RadCalNet calibration network, explain the intercomparison methodology and the criteria for selecting clear-sky scenes, and outline the process of converting digital numbers to top-of-atmosphere (TOA) reflectance.
2.1. Sensors
ASTER is a joint project between NASA and the Japanese Ministry of Economy, Trade, and Industry (METI) as part of the Terra platform. ASTER is not continuously imaging and must be tasked to collect data. ASTER has three bands as part of its visible and near-infrared (VNIR) camera: green, red, and near-infrared bands. ASTER VNIR data are available in two versions: Version 3 (v003) and Version 3.1 (v031), which was released in 2016 to make adjustments to radiometric calibration coefficients. Version 3.1 also includes improvements to the atmospheric correction algorithms and updates to the digital elevation model (DEM) product [
20].
The Landsat 8 satellite is part of the long-running Landsat program operated by NASA and the United States Geological Survey (USGS) [
21]. Landsat 8 collects up to 700 scenes per day, with an orbit that is essentially the same as the Terra platform except that it is eight days out of phase. Landsat 8 carries the Operational Land Imager (L8 OLI) and the Thermal Infrared Sensor (L8 TIRS), which provide multispectral data. The L8 OLI sensor has five VNIR bands: the coastal aerosol, blue, green, red, and VNIR bands.
Landsat 9 upholds the tradition of the Landsat program in collaboration with NASA and the USGS, contributing vital Earth observation data. Similar to its predecessor, Landsat 8, is in an orbit with an eight-day offset for consistent lighting conditions and was in the same orbit as Terra until October 2022, when Terra was lowered. The satellite carries the advanced Operational Land Imager (L9 OLI) and Thermal Infrared Sensor (L9 TIRS), refining the capabilities of Landsat 8’s instruments. L9 OLI’s spectral bands include coastal aerosol, blue, green, red, near infrared, and short-wave infrared. Landsat 9’s mission aligns with its predecessors, providing indispensable multispectral and thermal data for various applications spanning from environmental monitoring to disaster management. The characteristics of the ASTER and OLI sensors are summarized in
Table 1. The band names and center wavelength values of OLI and ASTER in the 400 nm to 1000 nm range that are used in this study are listed in
Table 2.
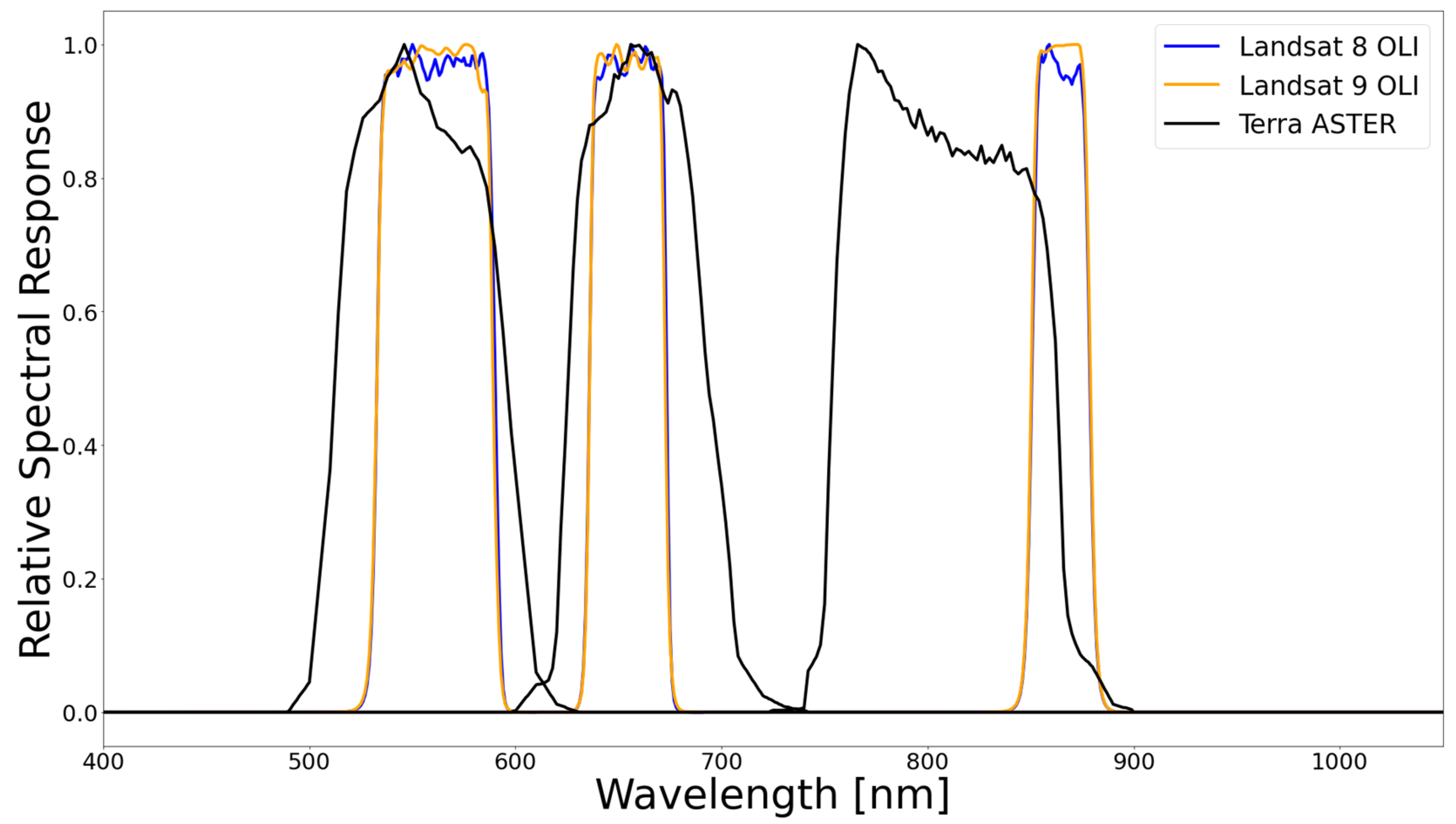
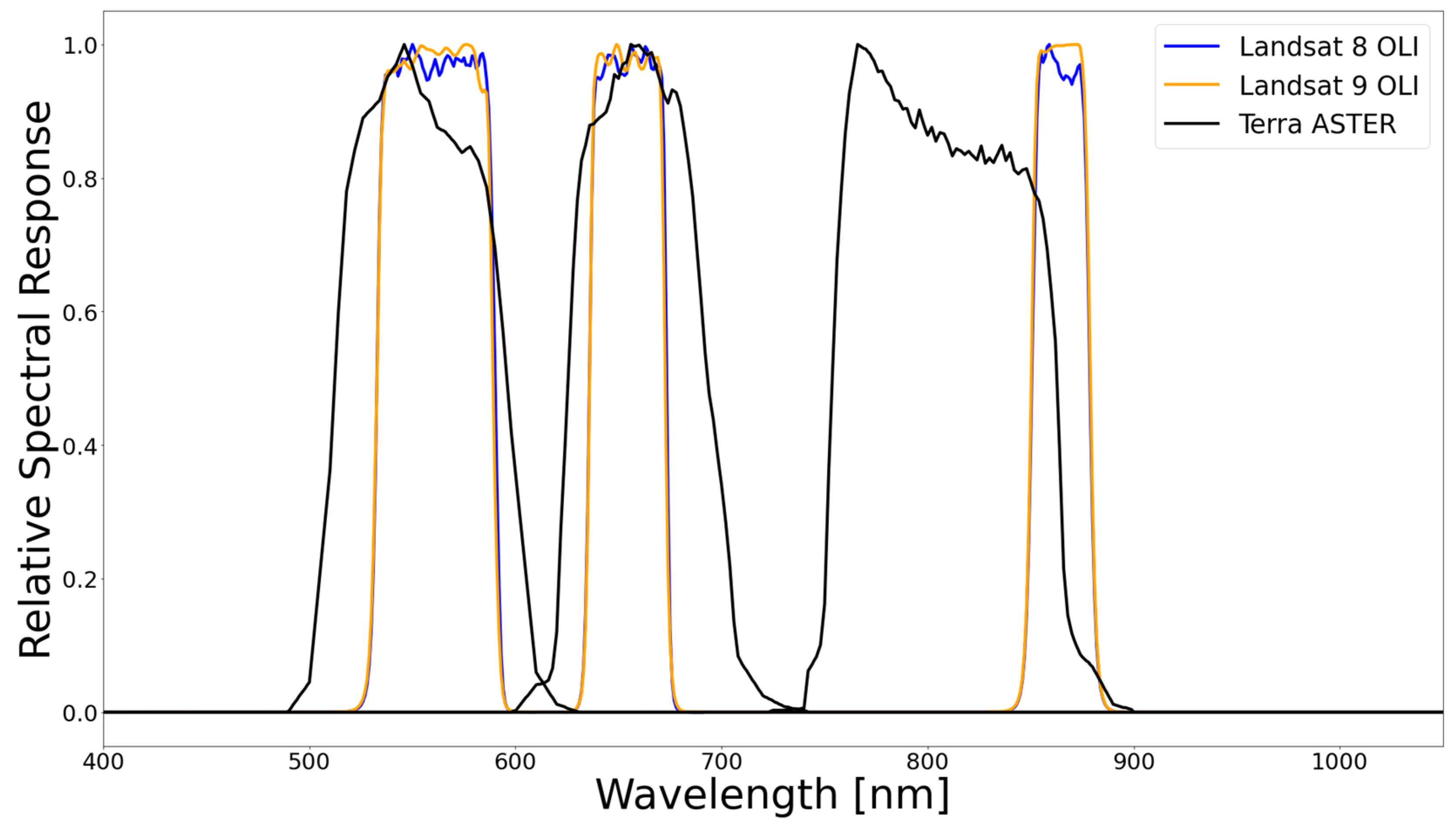
Figure 1 shows the relative spectral responses (RSRs) of the L8 OLI, L9 OLI, and ASTER sensors in the 400 nm to 1000 nm range. The three sensors have similar spectral responses in the shared spectral regions, although there are some differences in the center wavelength and band width. For example, the green band of ASTER is slightly wider than those of L8 OLI and L9 OLI, with a slightly shorter center wavelength. Another example is the near-infrared band of ASTER, which is broader than those of L8 OLI and L9 OLI but at a shorter center wavelength. Such a band shape can be beneficial for monitoring vegetation water content, but the OLI band was able to take advantage of improved sensor technology to allow for a narrower band that was placed to reduce effects caused by an absorption feature from atmospheric water vapor.
2.2. RadCalNet
Absolute radiometric calibration is the key step to ensuring the accuracy of remote sensing data as it corrects for variations in sensor response due to changes in the sensor’s environment or the aging of the sensor’s components. RadCalNet is a network of sites established by the Infrared Visible Optical Sensors (IVOS) Subgroup of the Committee on Earth Observation Satellites (CEOS) Working Group on Calibration and Validation (WGCV) [
10]. Its purpose is to provide SI-traceable data suitable for assessing calibration while also providing an opportunity to evaluate the calibration across multiple Earth observation sensors. The network includes multiple sites for the purpose of optical imager radiometric calibration in the visible-to-short-wave infrared (SWIR) spectral range [
10]. To ensure minimal uncertainties in the calibration process caused by path radiance, misregistration, spectral differences, temporal variability, view angle differences, aerosols, adjacency effects, and weather conditions, a suitable cross-calibration site must possess specific characteristics, such as high surface reflectance, spatial uniformity, flat spectral reflectance, temporal invariance in surface properties, a near-Lambertian surface, high altitude, large size, arid region, and accessibility [
25]. The two sites used here, Railroad Valley Playa and Gobabeb, best match these criteria, and both have a significant amount of available data for ASTER, L8 OLI, and L9 OLI while covering the longest periods. Coordinates and areas for the two sites are presented in
Table 3.
The Railroad Valley Playa site in Nevada, USA, with the four-letter name RVUS, has been utilized for reflectance-based vicarious calibration since the mid-1990s [
26]. Automated solar transmittance data collection began in 2001, with initial versions of downward-looking radiometers deployed in 2002. The current Radiometric Calibration Test Site (RadCaTS), featuring four ground-viewing radiometers (GVRs), was established in 2011. The RadCaTS’s region of interest (ROI) is approximately 1 km
2 (1000 m × 1000 m) and is centered at the coordinates 38.497°N, 115.690°W at an altitude of 1435 m. The site is in a remote, unpopulated area, which minimizes the effects of urbanization and other land-use changes on measurements. The surface reflectance is typical of clay-based playas, with higher values in the NIR and SWIR bands, and stable under dry conditions but varying due to occasional rain and snowfall. The surface behaves approximately Lambertian up to view angles of around 30° such that bidirectional reflectance effects are not the dominant uncertainty source for near-nadir sensor views [
27]. The yearly average aerosol optical depth is low, around 0.060 at 550 nm. GVRs are multispectral, with seven bands in the VNIR channel and one SWIR channel. Atmospheric data collection follows the AERONET (Aerosol Robotic Network) network’s acquisition scheme, and GVRs record data every two minutes [
28]. Data are transmitted to the University of Arizona via satellite uplink. The RadCaTS data is then processed to derive the site reflectance based on the GVR suite’s average.
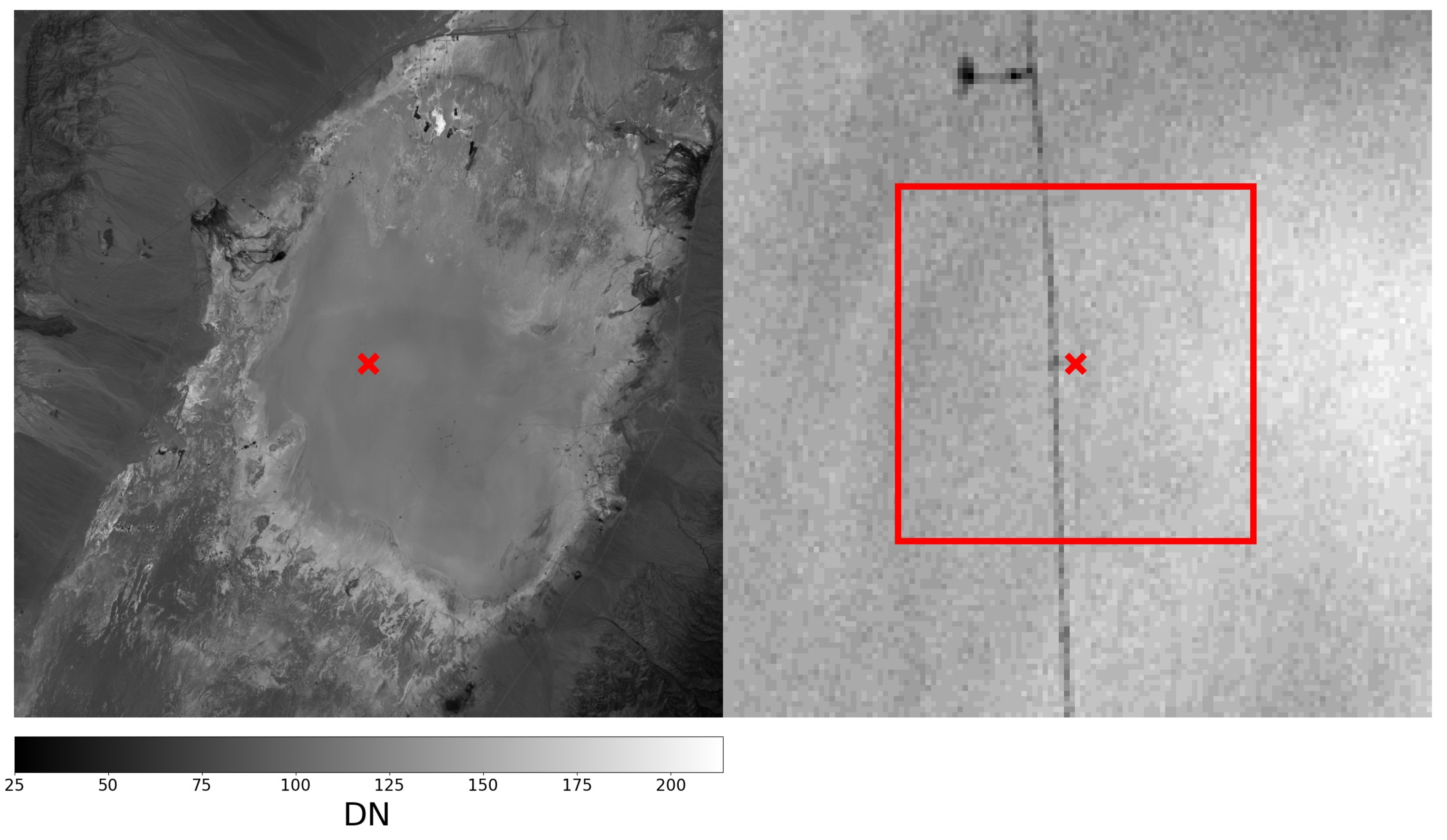
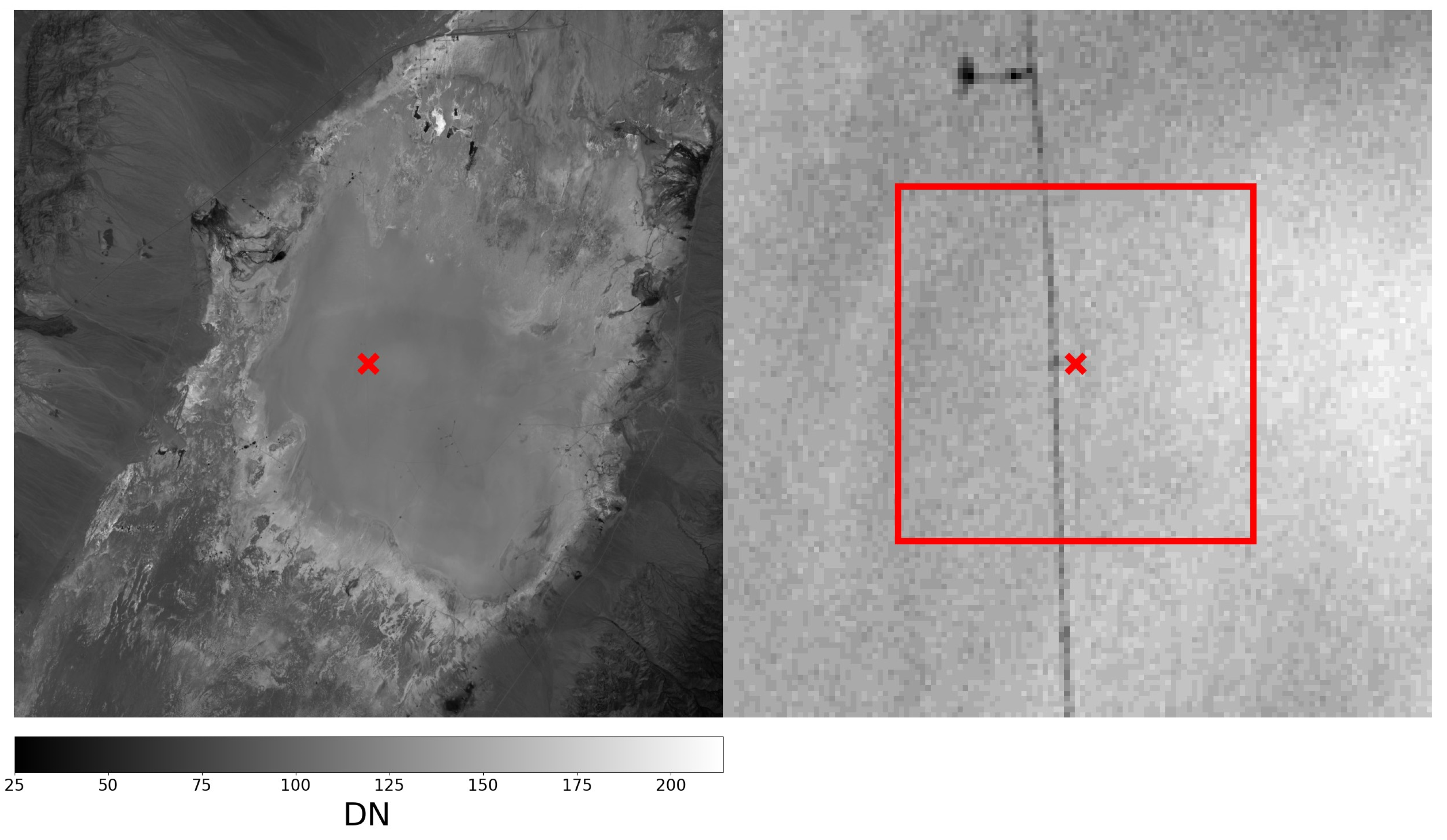
Figure 2 shows an image of the extended region of RVUS as well as the 1 km
2 ROI used by the RadCaTS and, thus, RadCalNet.
The Gobabeb site in Namibia, with the four-letter name GONA, was established as part of the RadCalNet prototype phase and has been active since July 2017. It is jointly operated by the European Space Agency (ESA) through subcontracting to the National Physical Laboratory of the United Kingdom (NPL), as well as the Centre National d’Etude Spatiales (CNES) [
29,
30]. An automated sun photometer that is part of AERONET provides atmospheric data in a fashion similar to that at RVUS. The sun photometer at GONA also retrieves measurements of upwelling surface radiance, allowing for the derivation of the surface bidirectional reflectance distribution function (BRDF). Operational software processes the data, calibrates the photometer, estimates atmosphere properties, and models the site’s BRDF. GONA was chosen through a global search focusing on quantitative evaluations of spectral characteristics, spatial consistency, the likelihood of clear skies, and other site parameters. It is the only site of the original five RadCalNet sites selected via this process. Calibration involves sun measurements, Rayleigh scattering, and external calibration methods. GONA’s role extended to aiding the RadCalNet Working Group in formulating criteria and guidelines for prospective network sites [
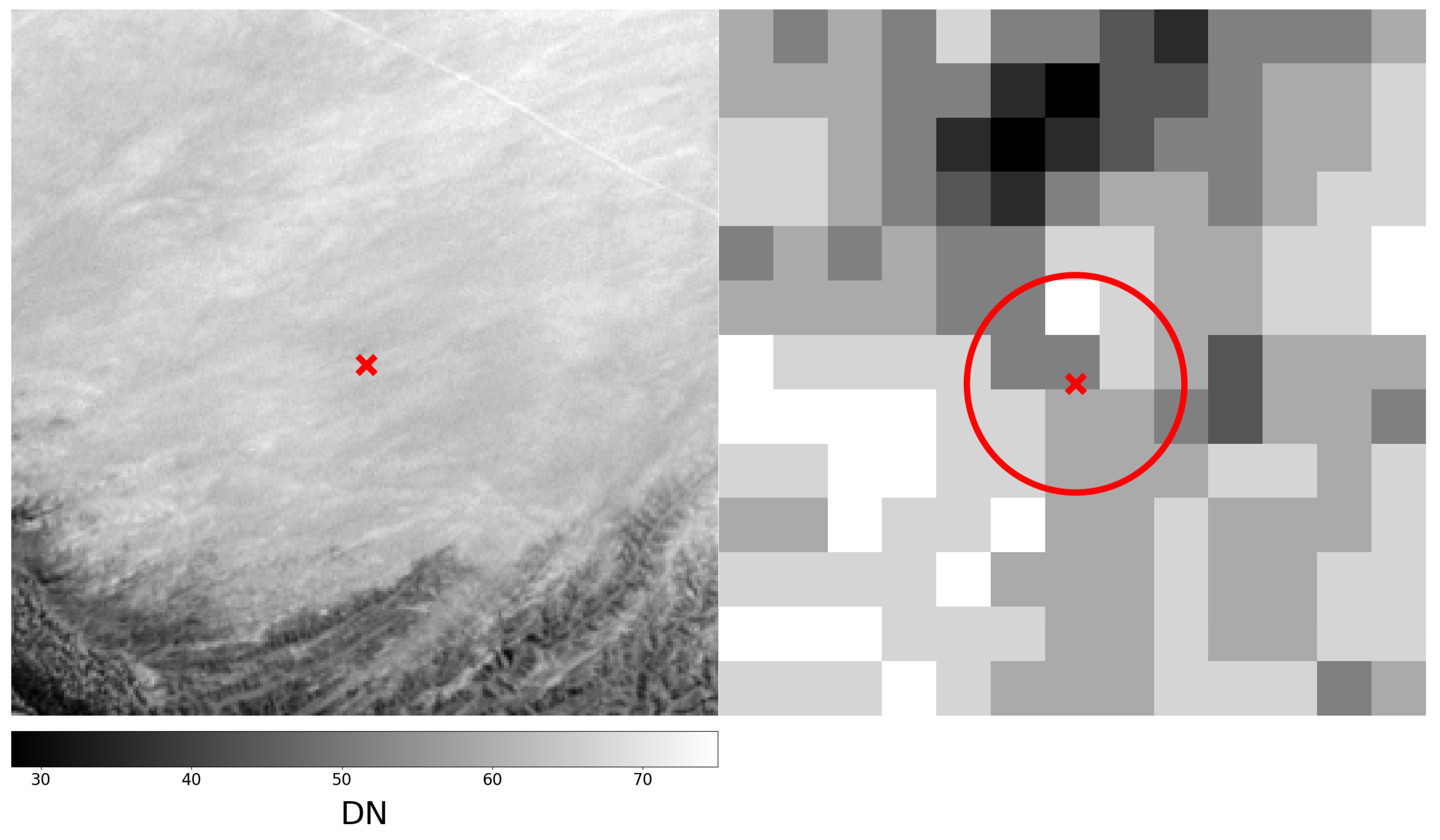
10]. The site is centered at 23.600°S, 15.120°E, and like La Crau, the ROI is a disk with a 30 m radius.
Figure 3 shows an overview of GONA as well as the 30 m radius disk ROI used by RadCalNet.
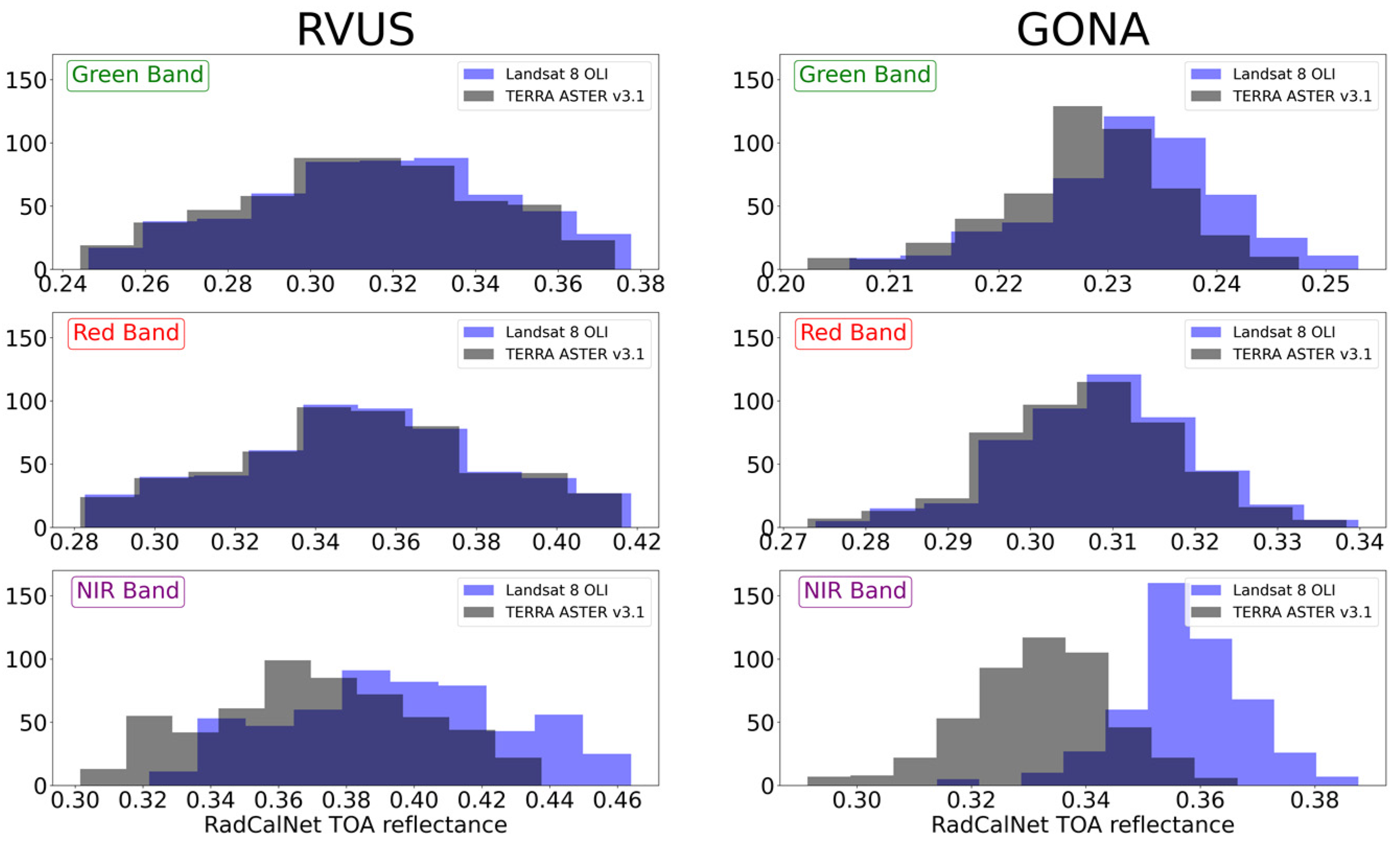
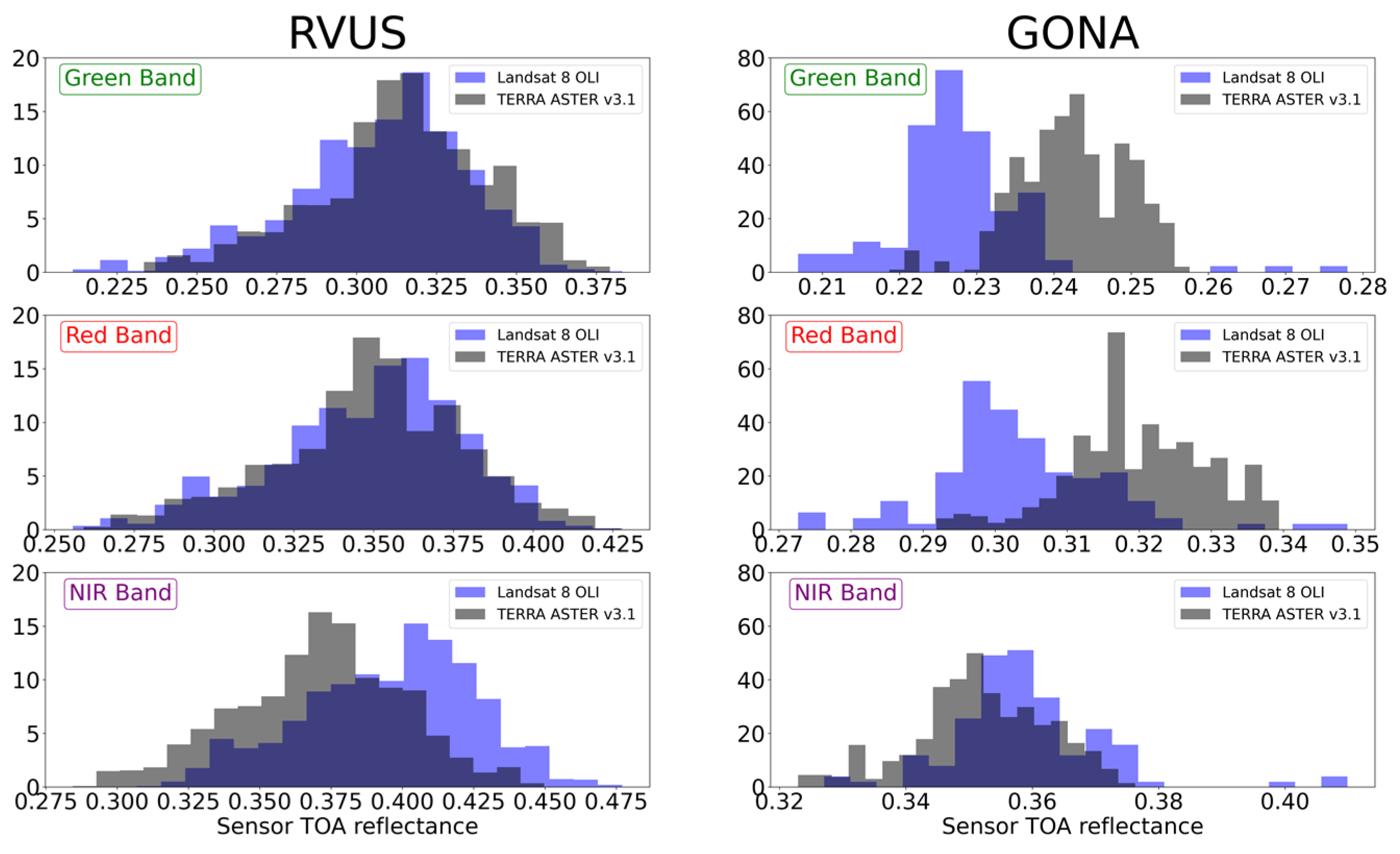
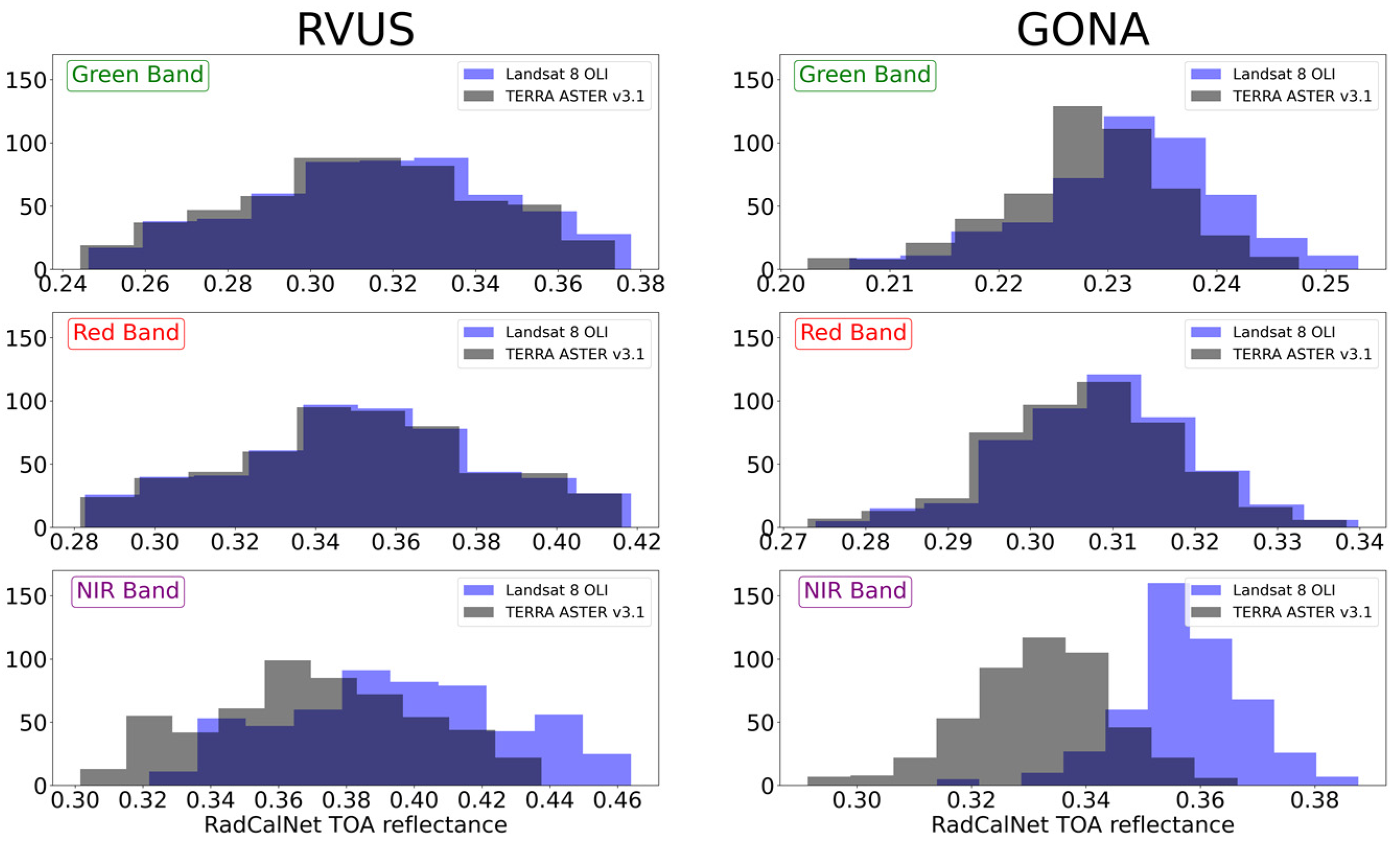
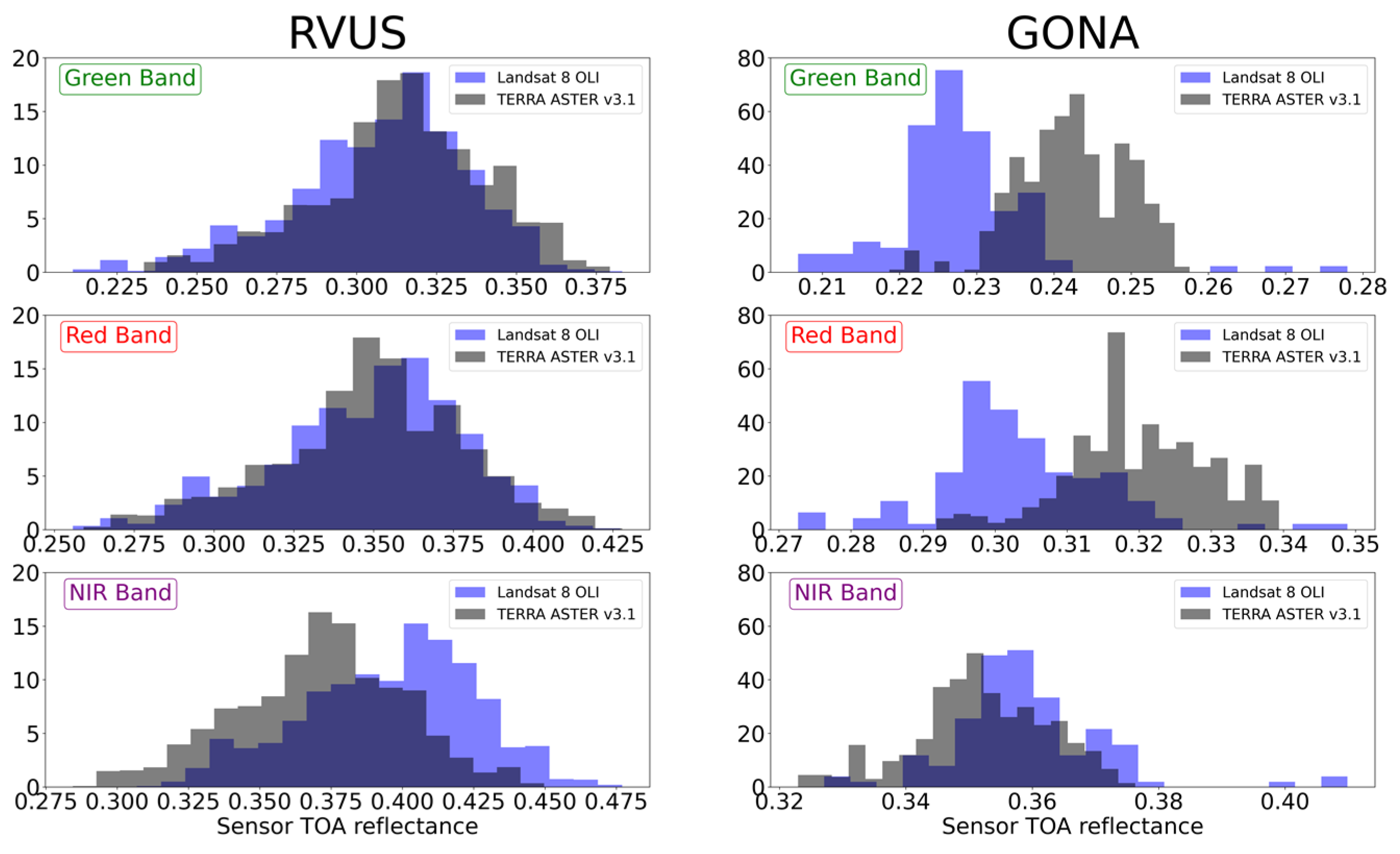
Figure 4 illustrates histograms depicting the band-averaged top-of-atmosphere (TOA) reflectance for both RVUS and GONA based on RadCalNet data from the two sites. The data were derived by band-averaging the RadCalNet values across the L8 OLI and ASTER RSRs for each sensor in the green, red, and NIR spectral bands. The data from RVUS were based on the 17:30 to 19:30 UTC RadCalNet data and the 8:30 to 10:30 UTC measurement from GONA. These specific times were chosen because they coincide closely with the overpasses of the Landsat and Terra satellites over RVUS and GONA. In the figure, the dark blue color represents the overlap between the two histograms for the two sensors.
The histograms reveal that RVUS exhibits a broader range of TOA reflectance values across all three spectral bands compared to GONA. Notably, the histograms for the green and red bands closely resemble each other. As a result of the similarity in spectral response between L8 OLI and ASTER in these bands, the spectral reflectance at both sites is relatively flat over those bands. However, when examining the NIR band, a noticeable difference in the histograms is observed that is consistent at both two sites. The spectral reflectances at RVUS and GONA are also relatively flat in this spectral region, though the width of the ASTER band means that it is affected by the small slope in the surface reflectance. The variations in the histograms can be attributed to ASTER’s NIR spectral response having a wider spectral range and a shorter central wavelength compared to L8 OLI. This difference leads to ASTER sampling atmospheric absorption differently. Importantly, utilizing data from RadCalNet is advantageous because it easily addresses these spectral disparities by averaging the TOA reflectance data across bands.
2.3. Approach for Comparing Sensor Imagery with RadCalNet Measurement Data
RadCalNet utilizes ground-based measurements of surface and atmospheric conditions to predict TOA reflectance using the MODTRAN (moderate resolution atmospheric transmission) radiative transfer code [
10]. Uncertainties are provided for each RadCalNet data point that were determined from a look-up table approach [
31]. Operators of RadCalNet sites provide nadir-viewing bottom-of-atmosphere (BOA) reflectance data at 10 nm intervals between 400 nm and 2300 nm in 30 min intervals from 09:00 to 15:00 local standard time. Atmospheric parameters such as surface pressure and temperature, water vapor, ozone, aerosol optical depth, and Angstrom coefficient are also provided.
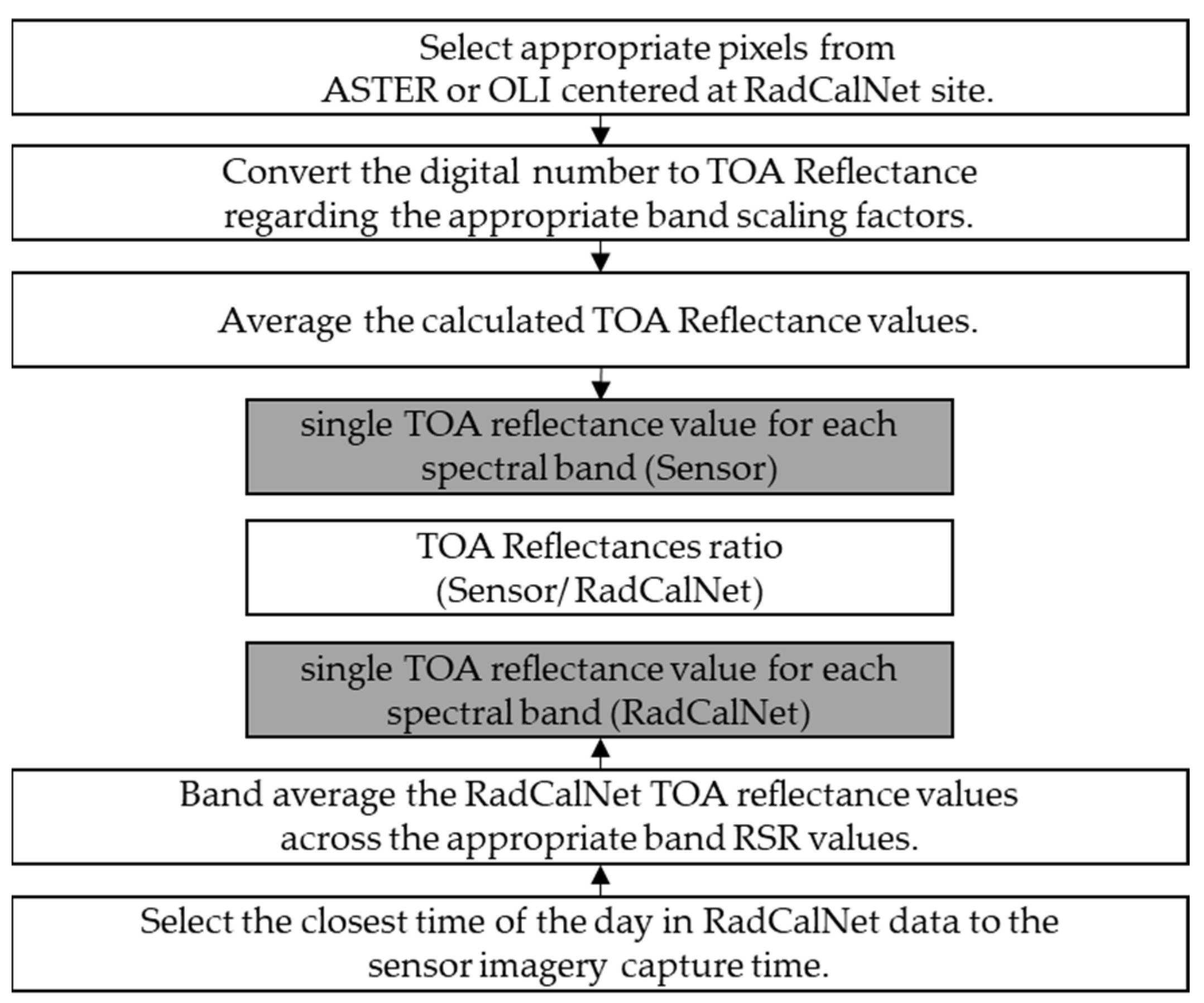
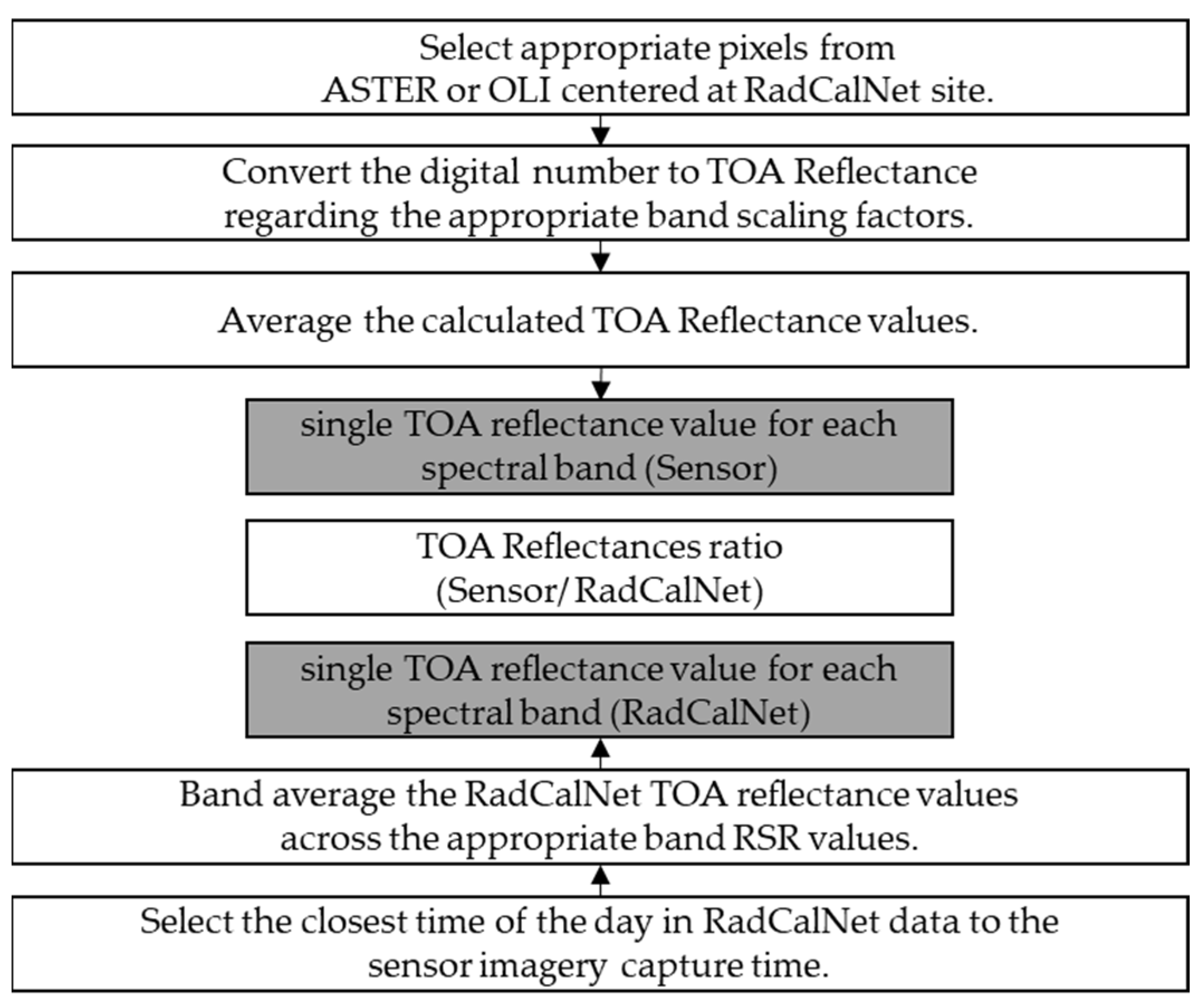
The calibration of a selected sensor is determined by comparing the image data from the sensor collected over the RadCalNet site to the band-averaged TOA reflectance from the RadCalNet processing closest in time to the sensor imagery. This comparison is presented by calculating the ratio of the TOA reflectance of the sensor to the TOA reflectance obtained from RadCalNet measurements.
The sensor pixels corresponding to the RadCalNet site are averaged and processed using conversion factors provided by the sensor team to determine the TOA reflectance for a given spectral band (as explained in
Section 2.4). The spatial resolutions of L8 OLI, L9 OLI, and ASTER differ, with L8 OLI and L9 OLI having a pixel size of 30 m for the visible and near-infrared bands and ASTER having a pixel size of 15 m for the same spectral range.
Therefore, to cover the RVUS site, an ROI of 33 × 33 pixels is used for L8 OLI and L9 OLI, and an ROI of 67 × 67 pixels is used for ASTER. The ROIs are centered at the specified RadCalNet site coordinates for RVUS to ensure complete coverage of the site by remote sensing data. In the case of GONA, a selection of pixels located nearest to the central point of the disk is employed for the L8 OLI and L9 OLI and ASTER datasets. The values attributed to these pixels are then averaged, considering their relative proximity to the center of the disk. For Landsat data, typically, 9 pixels situated closest to the central point of the disk are taken into account when performing the averaging operation. However, for ASTER data, a larger set of 16 pixels, also located in close proximity to the center of the disk, is factored into the averaging process. The process generates a single TOA value for each spectral band which is compared to the corresponding RadCalNet TOA reflectance value.
By band averaging the RadCalNet TOA reflectance values across the RSR values shown in
Figure 1 for both OLI and ASTER sensors at each data point, we account for spectral response variations between the two sensors as well as potential changes in the spectral characteristics of the test sites over time.
Figure 5 shows the logic flowchart for comparing image data from the sensor collected over the RadCalNet site to the band-averaged TOA reflectance from the RadCalNet data.
2.4. Conversion of Digital Numbers to TOA Reflectance
Each pixel in an L8 OLI, L9 OLI, or ASTER image is represented by a digital number (DN) that must be converted to a TOA reflectance value based on formulations provided by the OLI and ASTER calibration teams. There is a two-step process for converting ASTER data into TOA reflectance. Step 1 converts DN values into TOA radiance using the following:
The multiplicative scaling factor is a unitless number that converts raw DN values into radiance units, and the additive scaling factor is a bias correction factor. Radiance values are converted into TOA reflectance values using the following:
where d is the sun–earth distance, ESUN is the mean solar exoatmospheric irradiance for a given ASTER band, and θₛ is the solar zenith angle provided in the metadata. The values of ESUN(λ) are taken from WRC-based results recommended by the ASTER team and used in the determination of the ASTER surface reflectance data product [
32].
The process for OLI data is more straightforward since the imagery DN is directly related to reflectance and the TOA reflectance is found using a single step:
where Mᵨ is the reflectance multiplicative scaling factor for the spectral band, and Lᵨ is the reflectance additive scaling factor for the spectral band.
2.5. Clear-Sky Scene Selection
Table 4 and
Table 5 provide a detailed comparison of available matchups between clear-sky sensor images and RadCalNet data for the two test sites. Clear-sky conditions were determined based on the cloud percentage scores provided in the sensor metadata. The table shows the number of available data for Terra ASTER, Landsat 8 OLI, and Landsat 9 OLI. L8 OLI and L9 OLI data are obtained from the USGS Earth Explorer data portal, and this study uses the Collection 2 Level 1 precision terrain-corrected imagery (L1TP). The “Available” column shows the total number of available clear-sky matchups for each sensor. To clarify, “matchup” refers to the comparison of radiometric measurements obtained by L8 OLI, L9 OLI, and ASTER with those from RadCalNet when both sources have data available for the test site on the same day. The values in the tables are based on RVUS data dating back to 2013, when the RadCaTS became fully operational in its current configuration. Thus, there are no RadCalNet data available for ASTER between 1999 and 2013.
Notably, L8 OLI has the highest number of available matchups at 75 for RVUS and 49 for GONA, while ASTER has 50 and 43 for these respective sites. The lower number of available matchups for ASTER compared to L8 OLI is partly due to the fact that ASTER must be tasked to collect data for specific areas or targets, while L8 OLI is continuously acquiring data over the US. This means that L8 OLI has more opportunities to capture data over a wider range of targets and therefore has more matchups available for intercomparison with other sensors. The matchups for L9 OLI are far fewer due to its recent September 2021 launch.
One interesting point to consider is that the maximum number of points that would be available at either site would be approximately 26 matchups per year. Thus, the L8 OLI matchups indicate a success rate of approximately 30%. The reasons for which data may not have a matchup range from poor site conditions to anomalies in ground-based instrumentation, poor atmospheric conditions, or a lack of data from the on-orbit sensor. The success rate here is an excellent example as to the motivation of automated data at such sites as well as the networking of data from multiple sites.
To ensure higher accuracy, the difference in collection time from RadCalNet to the sensor being calibrated is as small as possible to reduce effects from surface and atmospheric conditions. Recall that RadCalNet data are provided at 30-min intervals; thus, the ideal situation is that an ASTER, L8 OLI, or L9 OLI collection should have less than a 15-min difference in time for cases in which the RadCalNet instrumentation is operational and atmospheric conditions are suitable for a calibration. The work here has expanded that limit to 30 min in order to include additional dates for which there is no full complement of RadCalNet TOA reflectance. This approach trades between the larger time difference introducing different atmospheric conditions and effects from changes in surface reflectance leading to higher uncertainties in the radiometric calibrations to having a greater number of data sets.
Once a matchup has been found between the sensor and RadCalNet, the sensor and RadCalNet data are evaluated to determine the quality of the data and whether to include the data set in the calibration work. The four right-hand columns of
Table 3 and
Table 4 show the outcomes of this quality assessment to filter the matchups based on various factors that can affect the accuracy of radiometric intercomparison. The “site mismatch” column indicates the number of cases in which the sensor imagery could not readily be matched with a RadCalNet test site. For ASTER, there are 7 such cases (~15% of available matchups) in RVUS, while neither L8 OLI nor L9 OLI have this issue. All seven ASTER instances corresponded to cases in which the ASTER VNIR camera was pointed at a large off-nadir angle. There are far fewer occurrences of site mismatches for GONA, with only one instance for ASTER and none for L8 OLI and L9 OLI.
The “anomalous condition” column indicates the count of matchups in which the atmospheric conditions at RadCalNet sites were flagged as anomalous by the site owners or when an anomaly in surface conditions occurred. An anomaly in surface conditions could result in the site owner not deriving and providing BOA surface data as they may not meet the processing quality assurance metric. These anomalies could be related to atmospheric parameters such as pressure, temperature, water vapor, ozone, aerosol optical depth, and the aerosol Angstrom coefficient or are flagged by the RVUS site operator based on their assessment of the surface conditions during the matchup. For ASTER, L8 OLI, and L9 OLI, 20%, 20%, and 13% of available matchups were affected by an anomalous atmosphere, respectively, at RVUS. These numbers are significantly lower at GONA, reflecting the differences in quality assessments (QAs) at the sites.
Finally, the “Good” column shows the number of data sets available after applying the filters that are used here and for which it is expected that there should be suitable absolute uncertainties for the absolute radiometric evaluation of ASTER, L8 OLI, and L9 OLI. RVUS has 33 (66% of available matchups), 60 (80% of available matchups), and 7 (87% of available matchups) data sets that were considered “good” for ASTER L8 OLI, and L9 OLI, respectively. The values for GONA for ASTER, L8 OLI, and L9 OLI, are 93%, 94%, and 100%, respectively.
5. Conclusions and Future Work
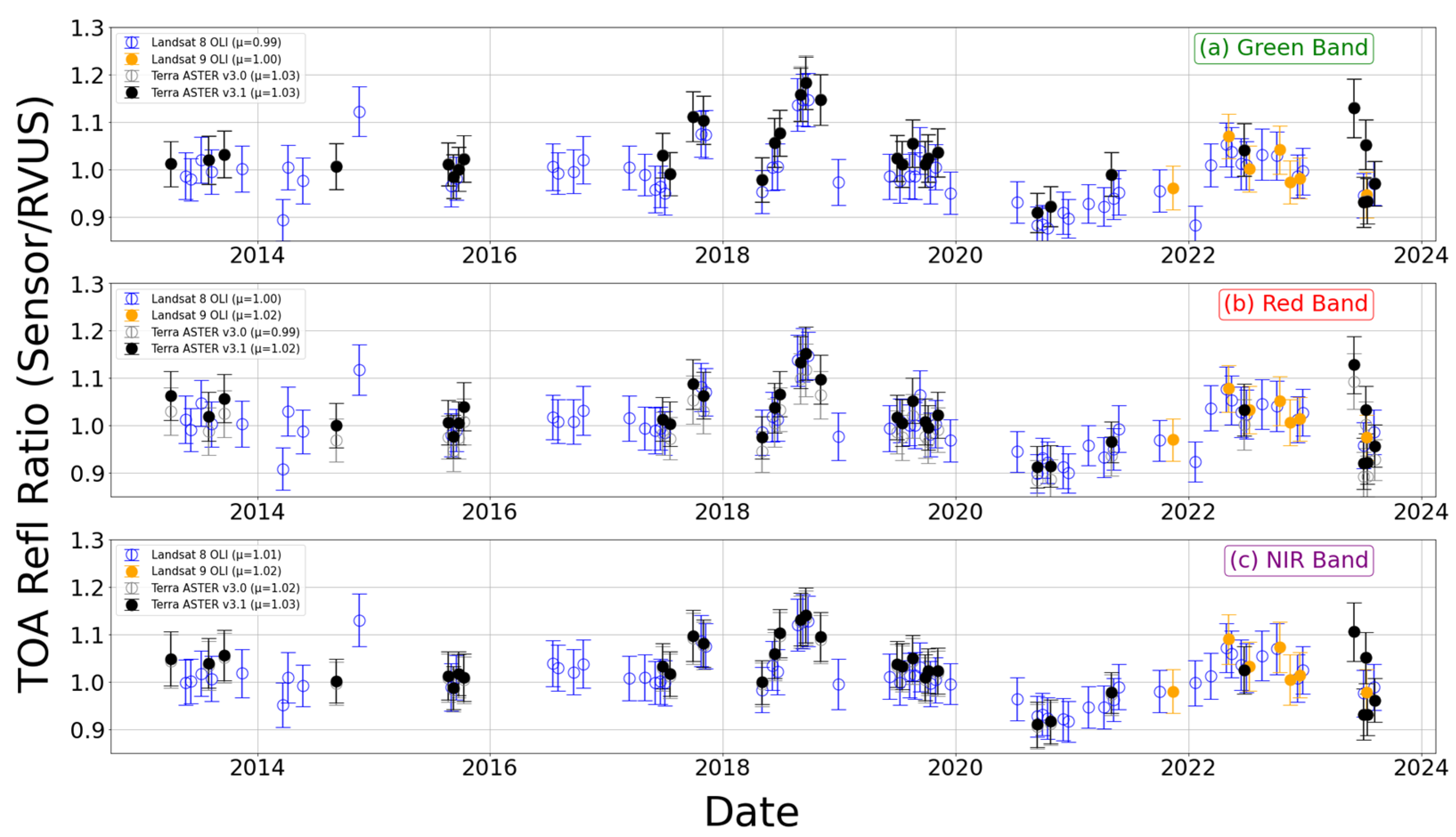
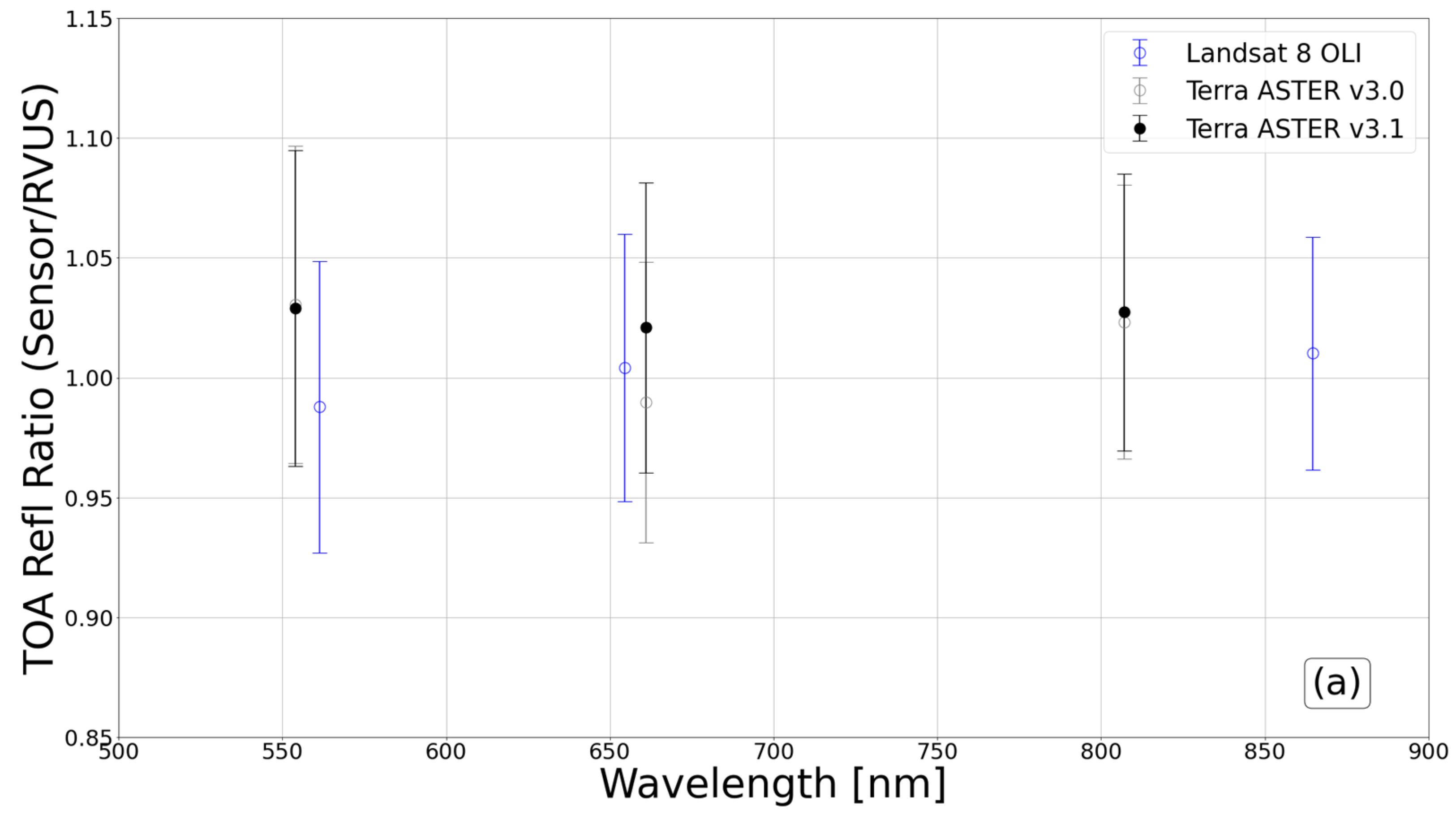
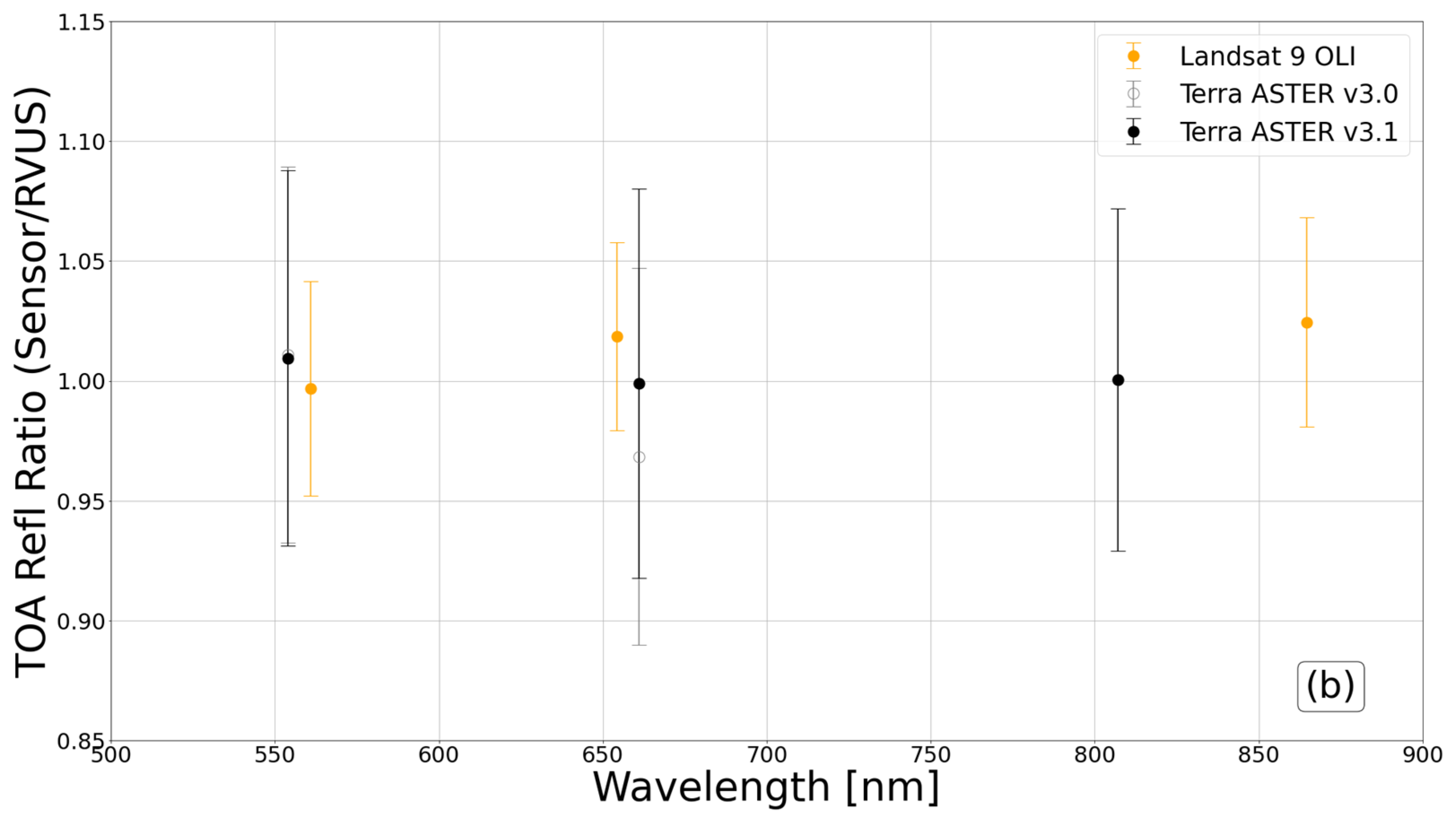
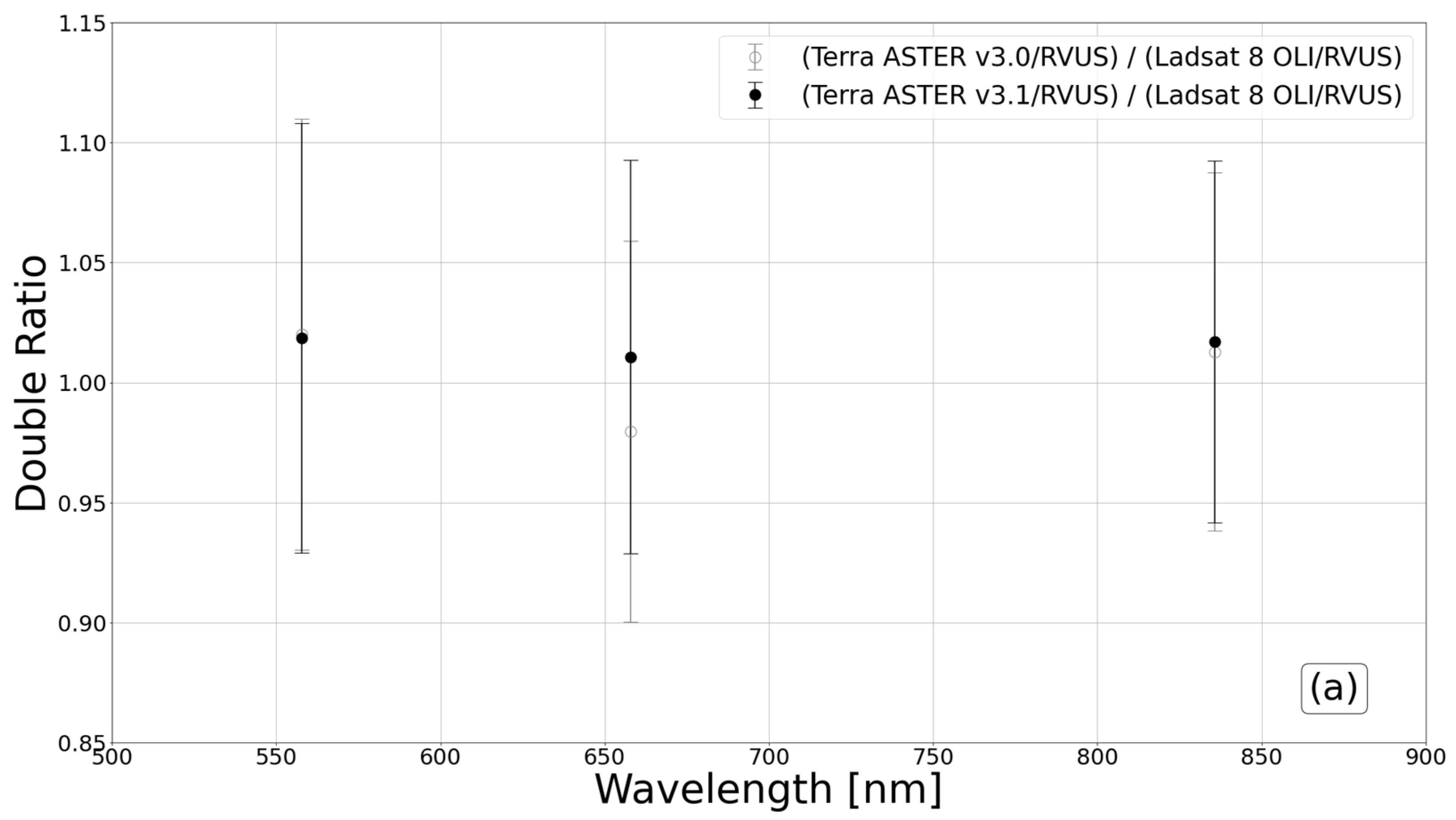
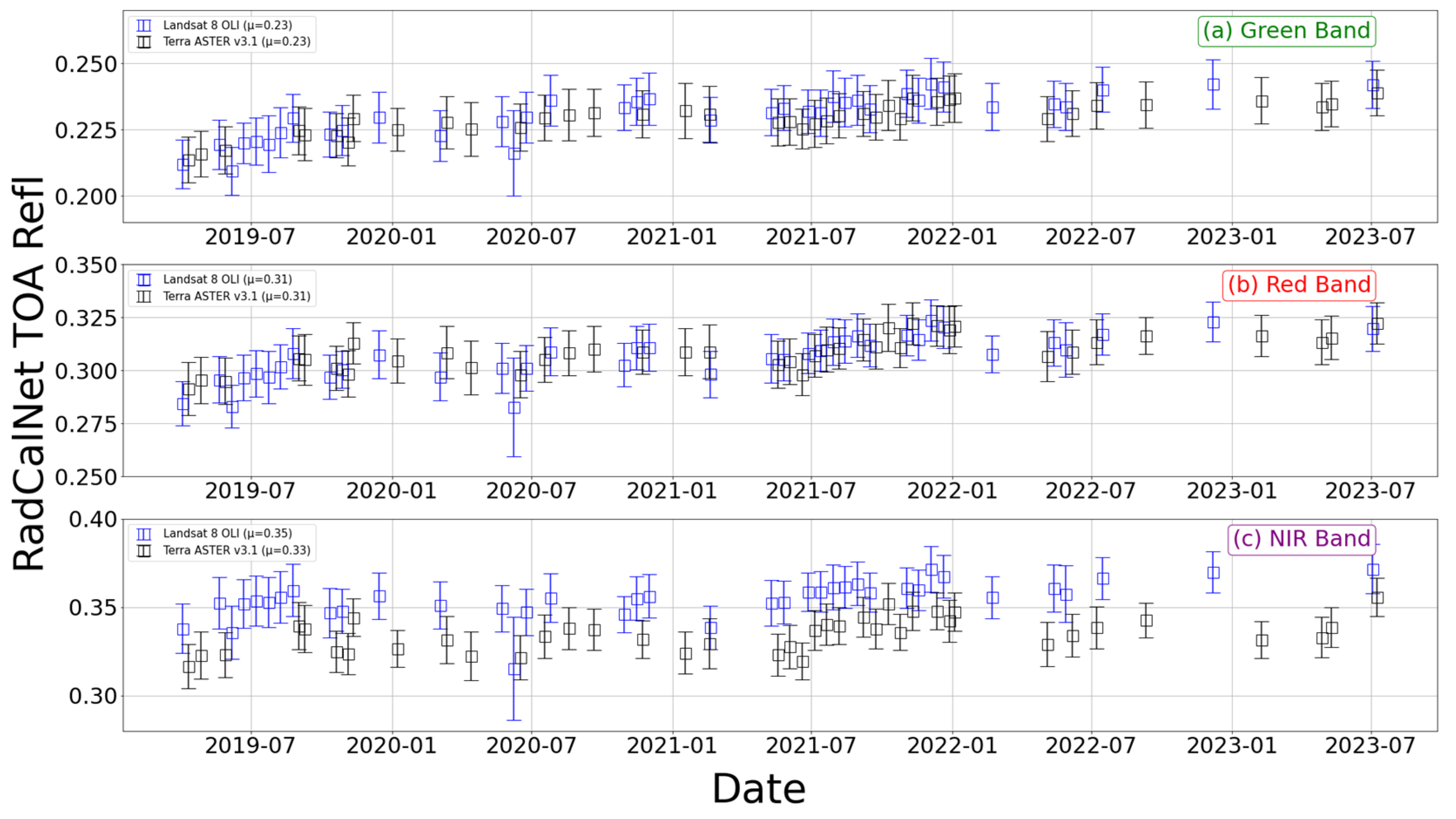
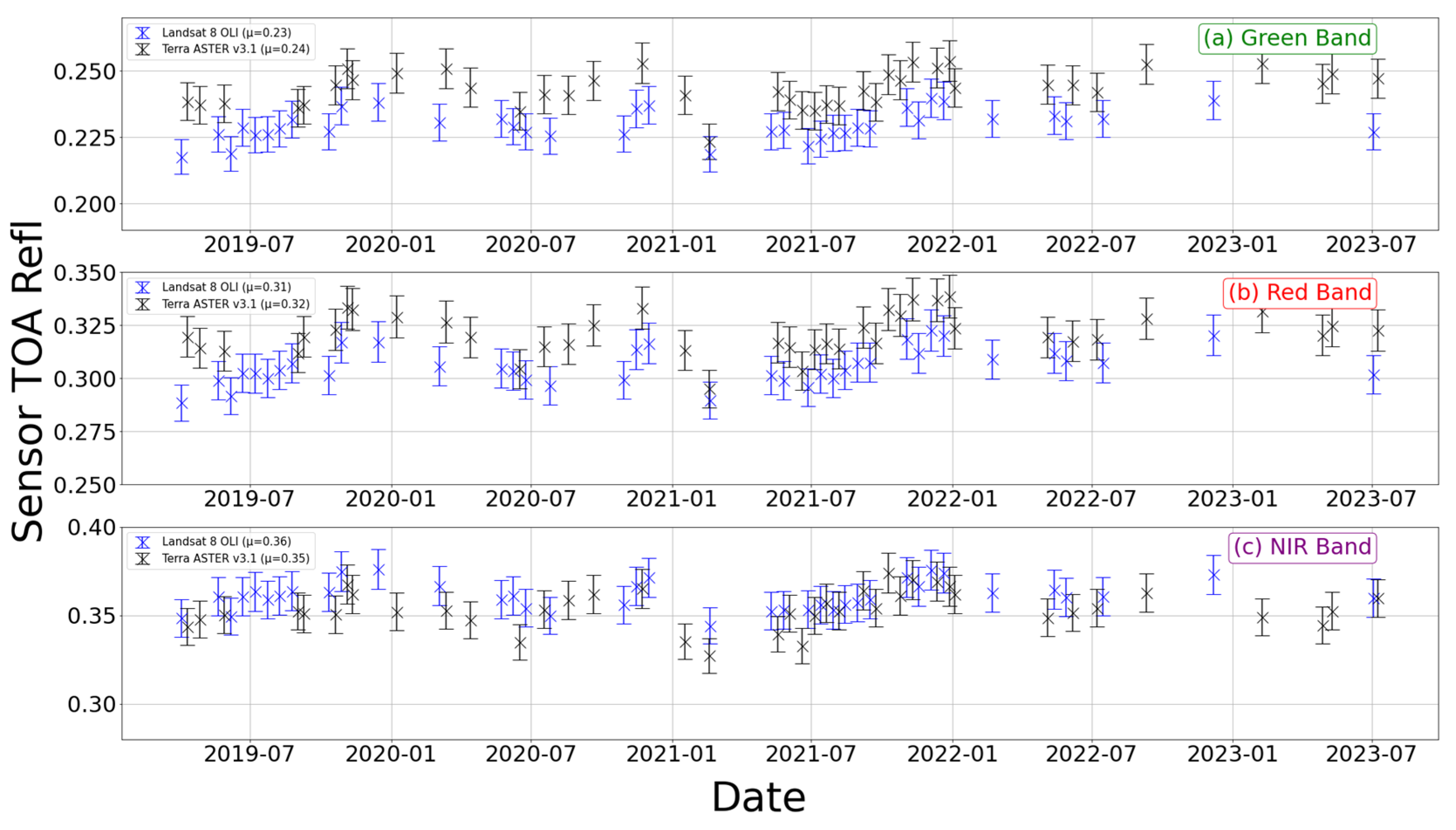
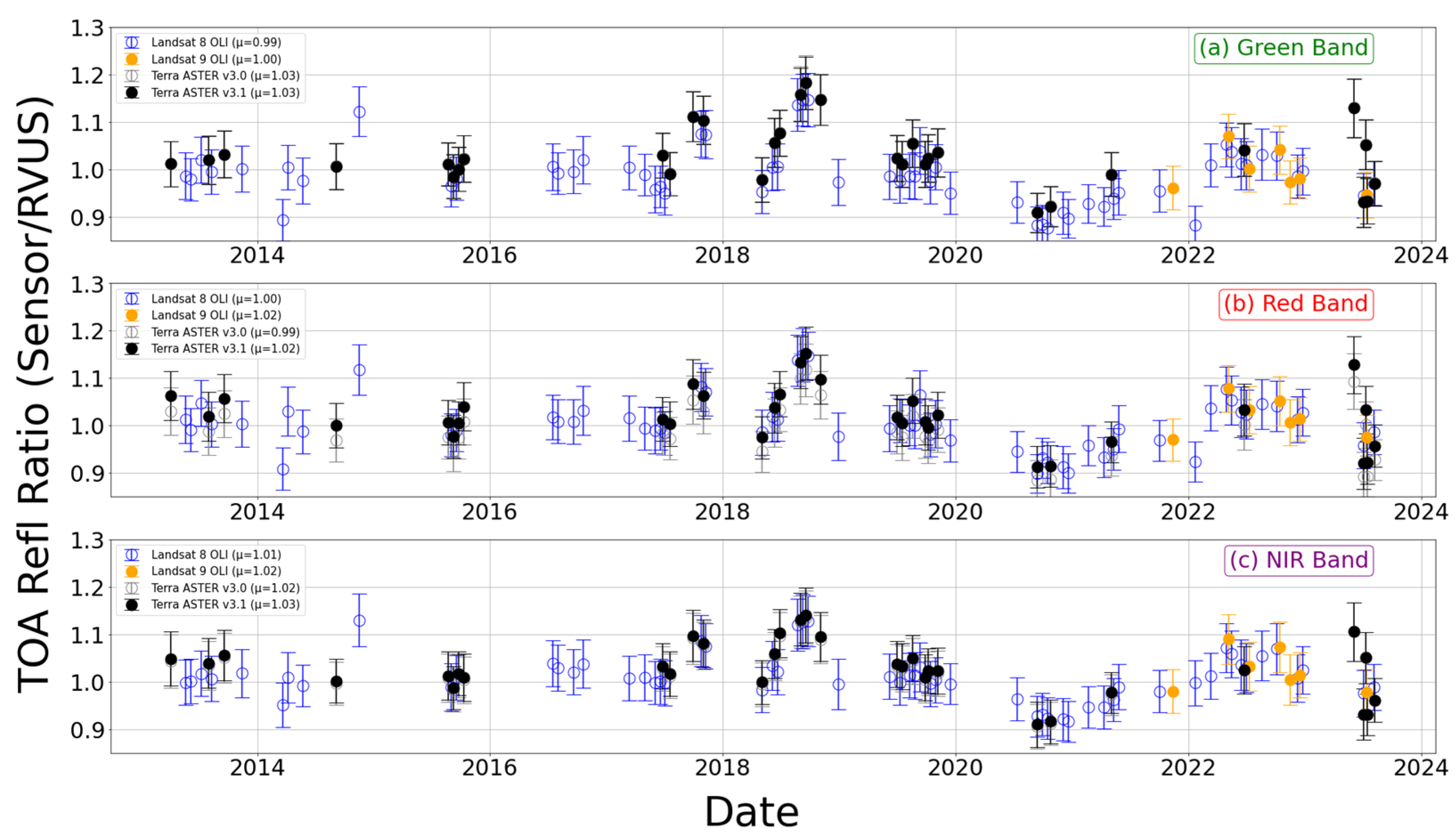
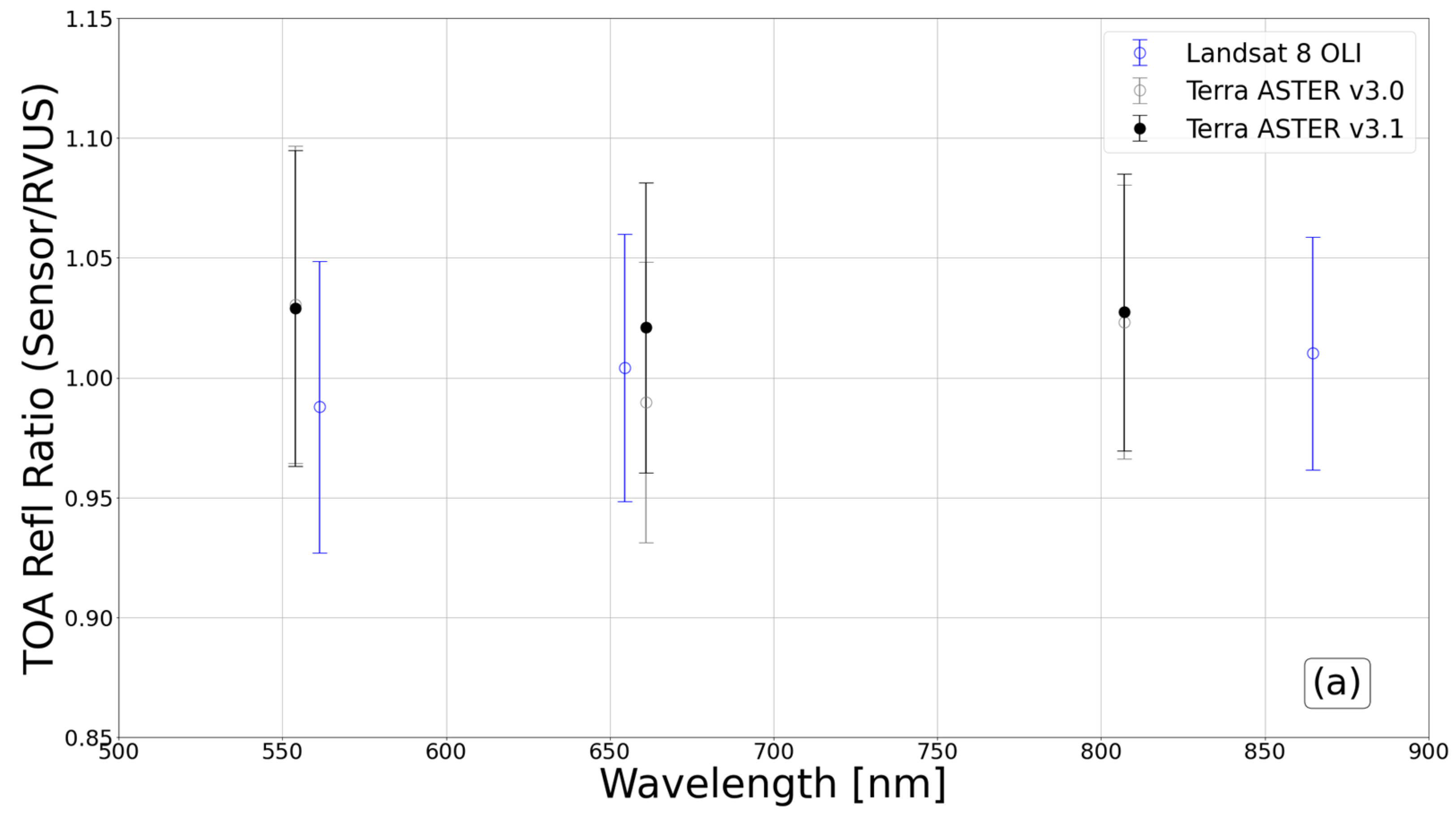
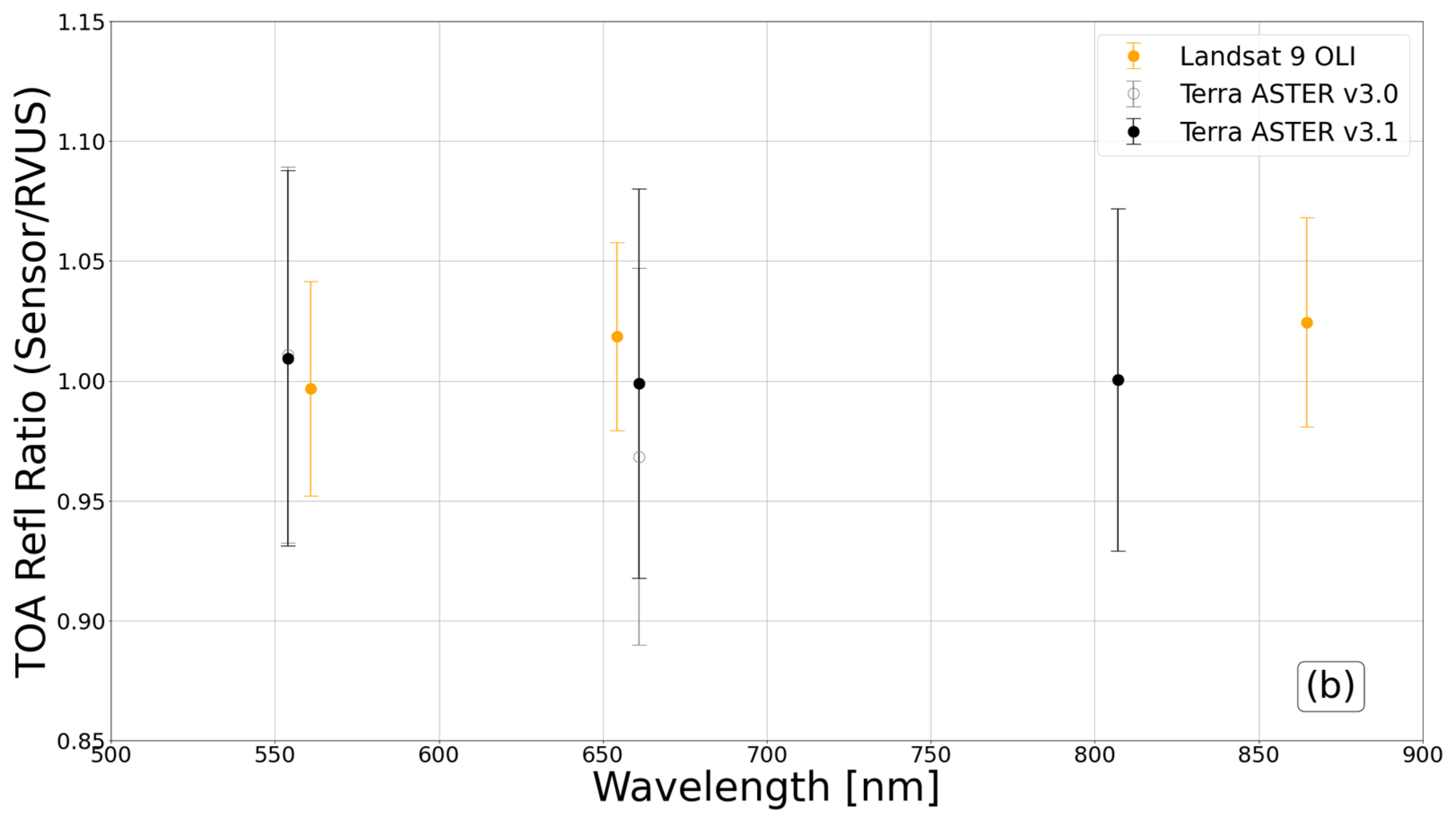
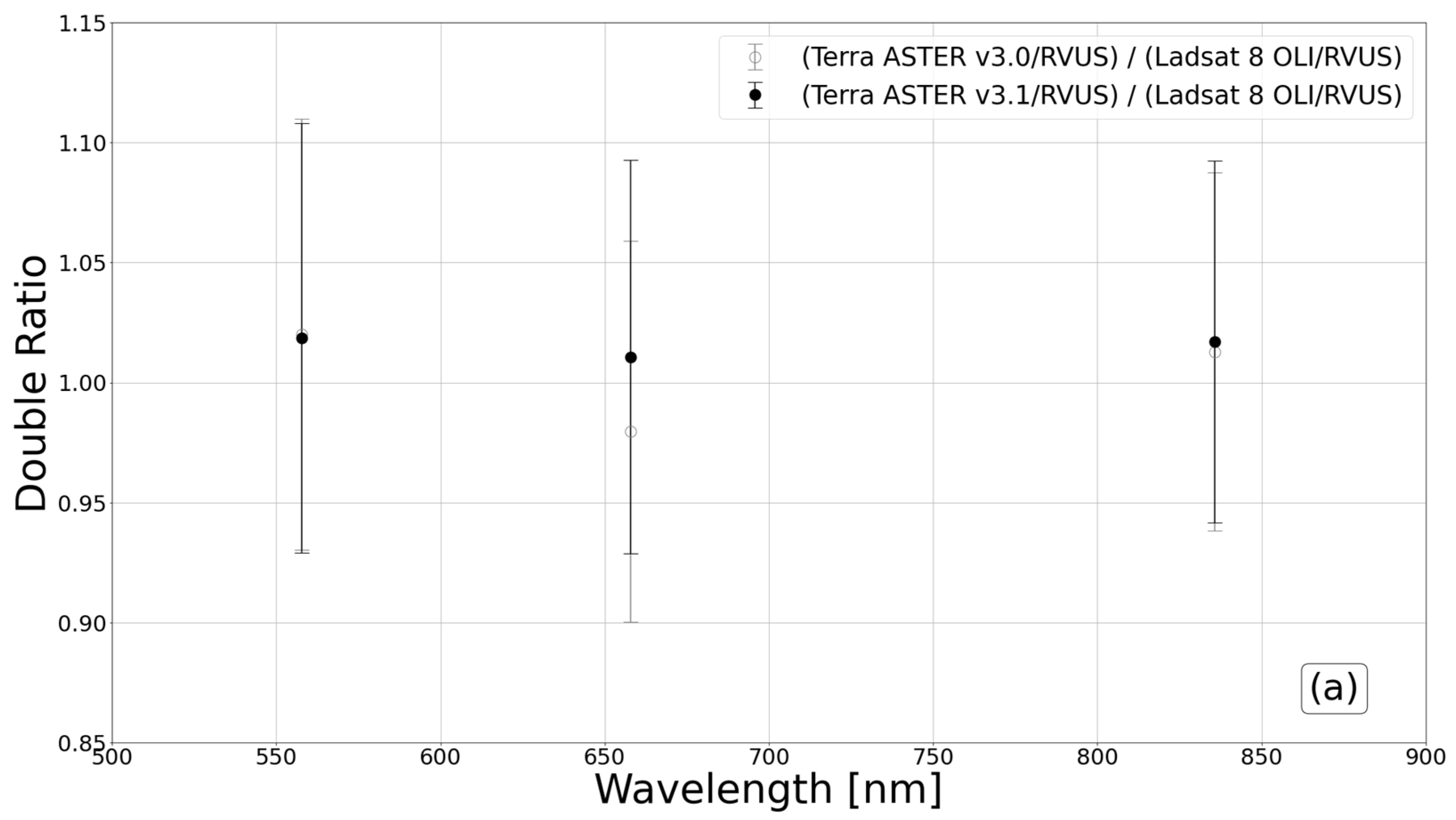
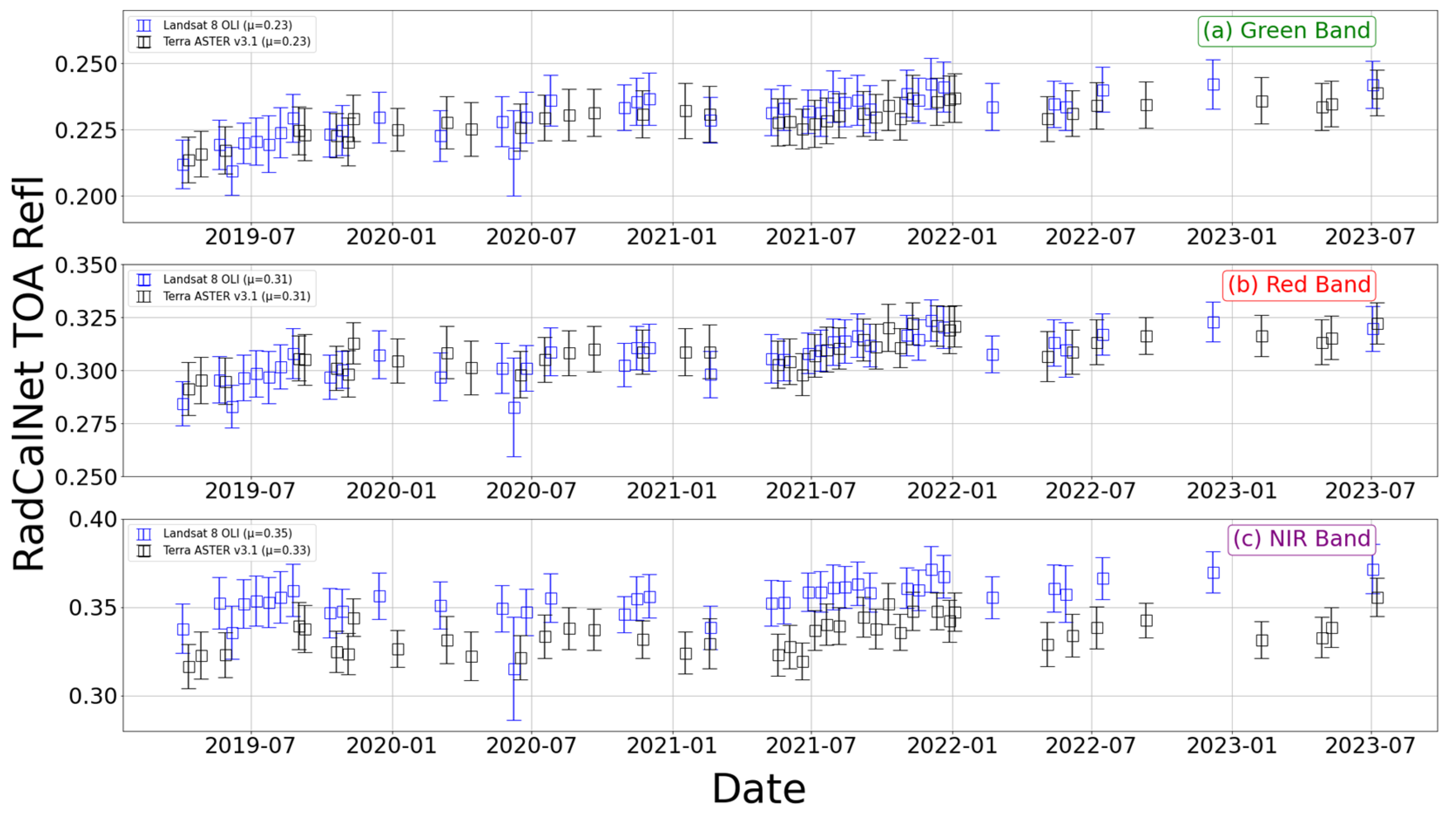
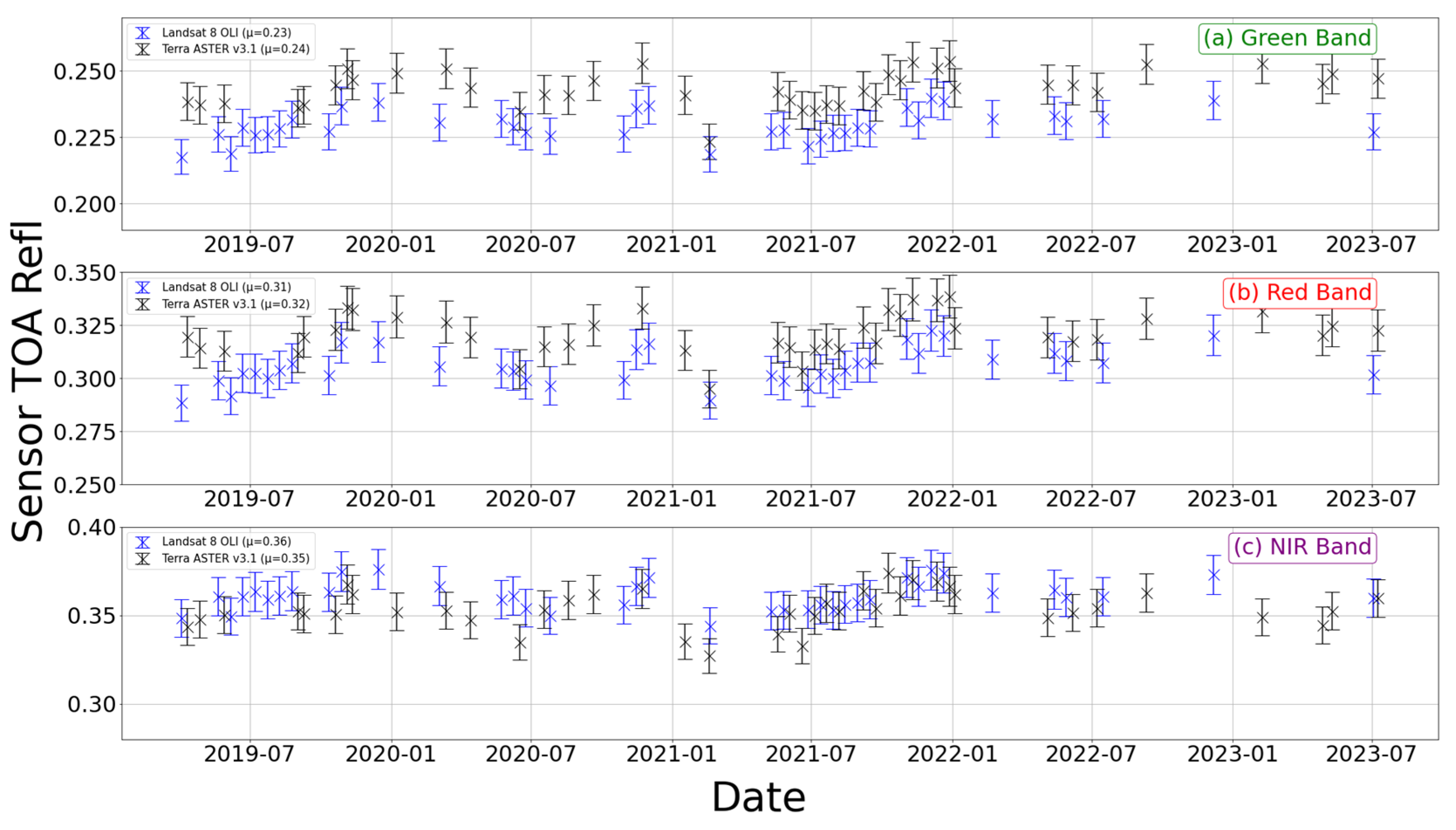
The SI-traceable uncertainties of RadCalNet data products allow the TOA reflectances computed by ASTER and L9 OLI to be compared to a standardized and traceable calibration reference. The intercomparison results show that both ASTER and OLI agree with RadCalNet to well within the combined absolute uncertainties of the sensor and the test site data. One important additional result is that this work confirms that the Railroad Valley Playa and Gobabeb RadCalNet sites are suitable for use with sensors with a spatial resolution as small as 15 m. Further work is underway to understand the different behaviors of the ASTER sensor between the GONA and RVUS sites.
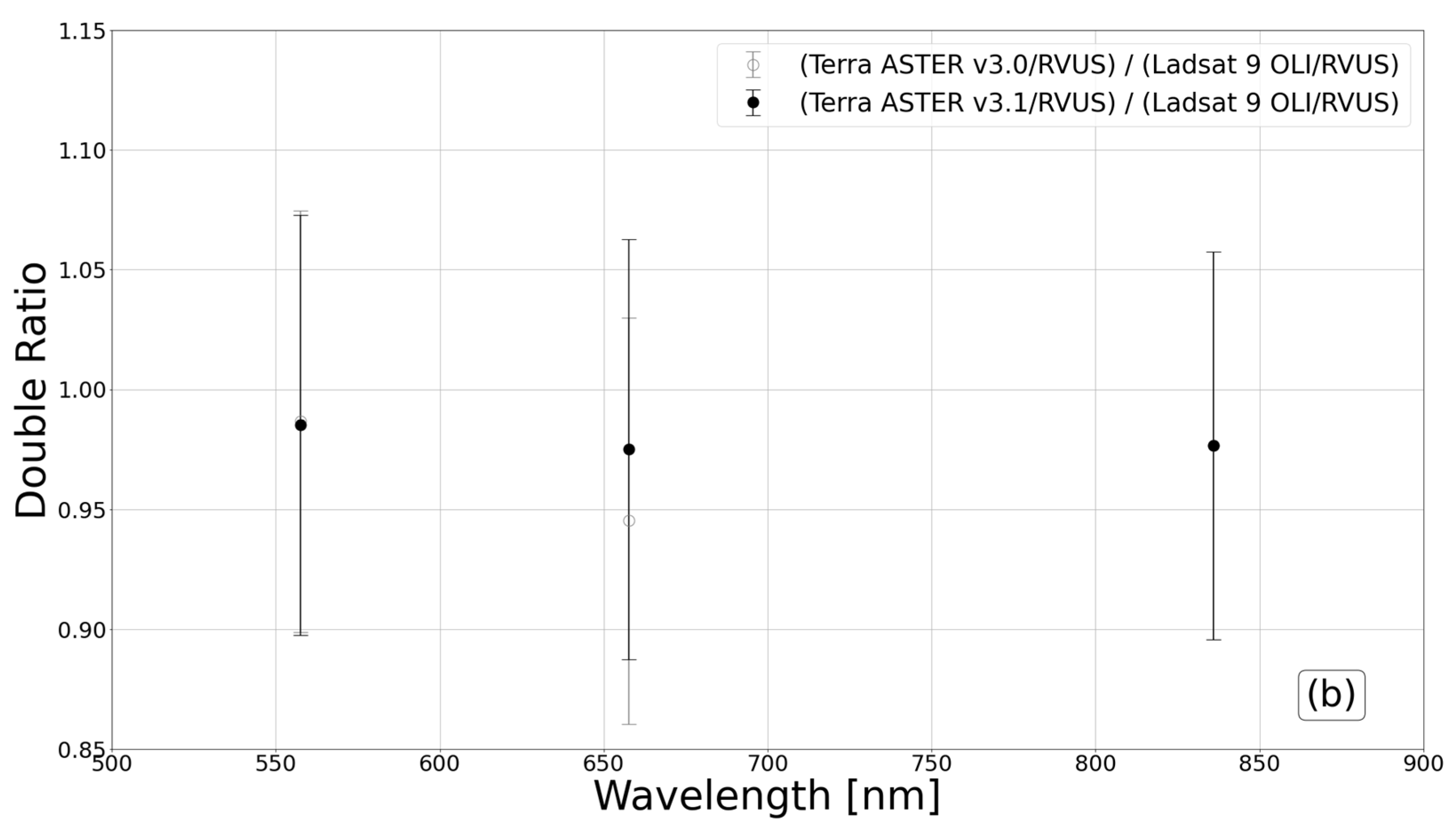
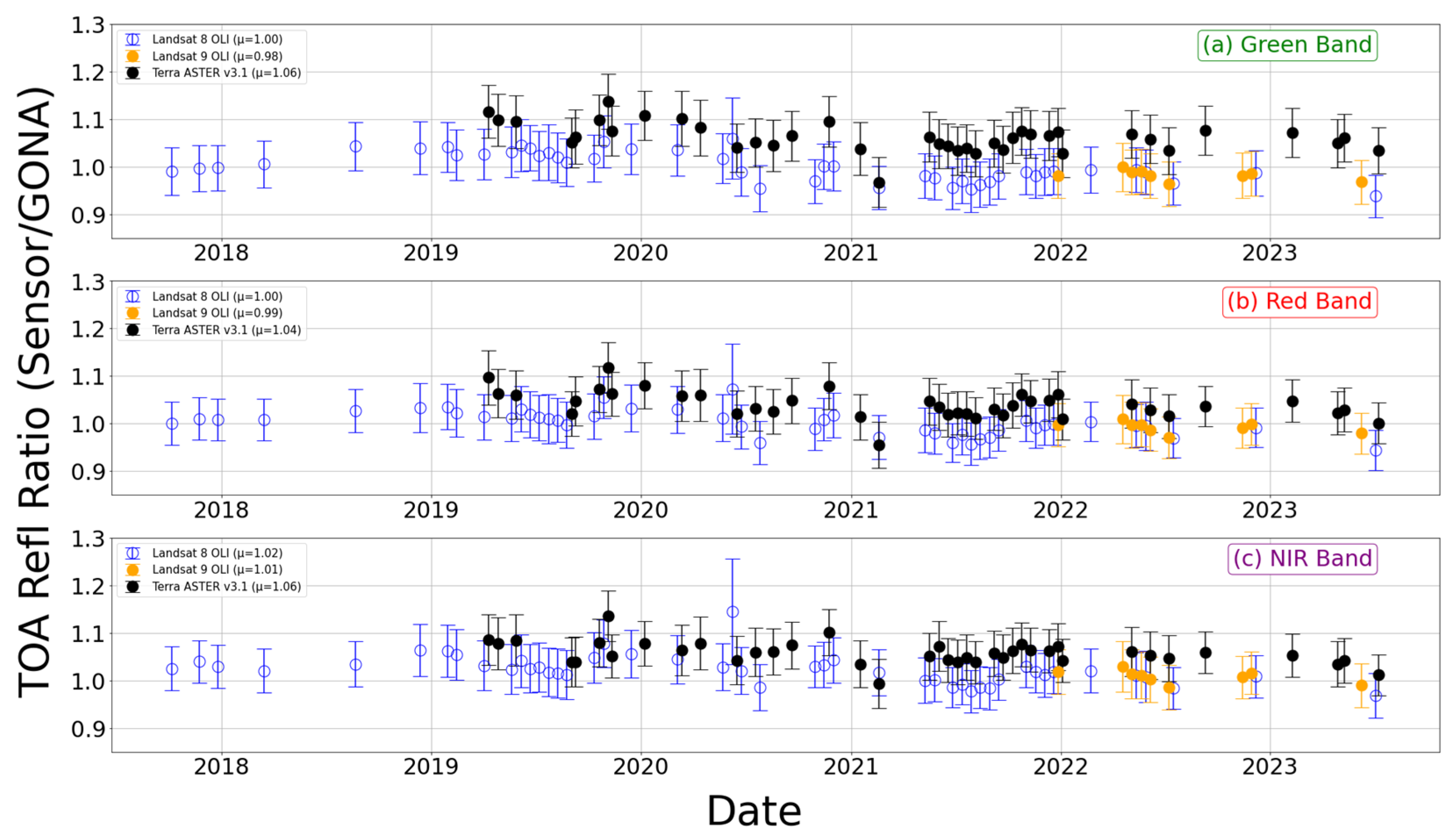
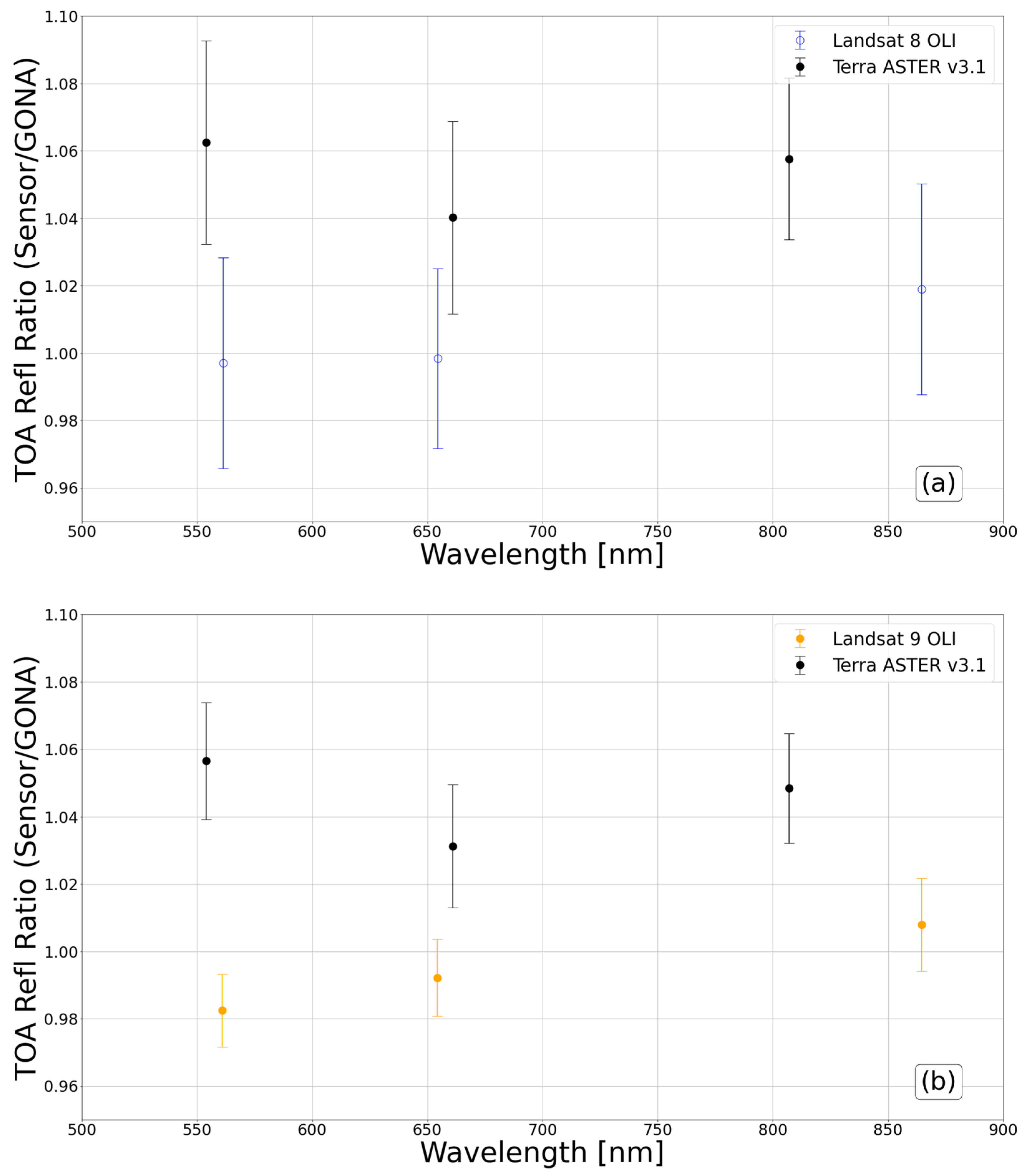
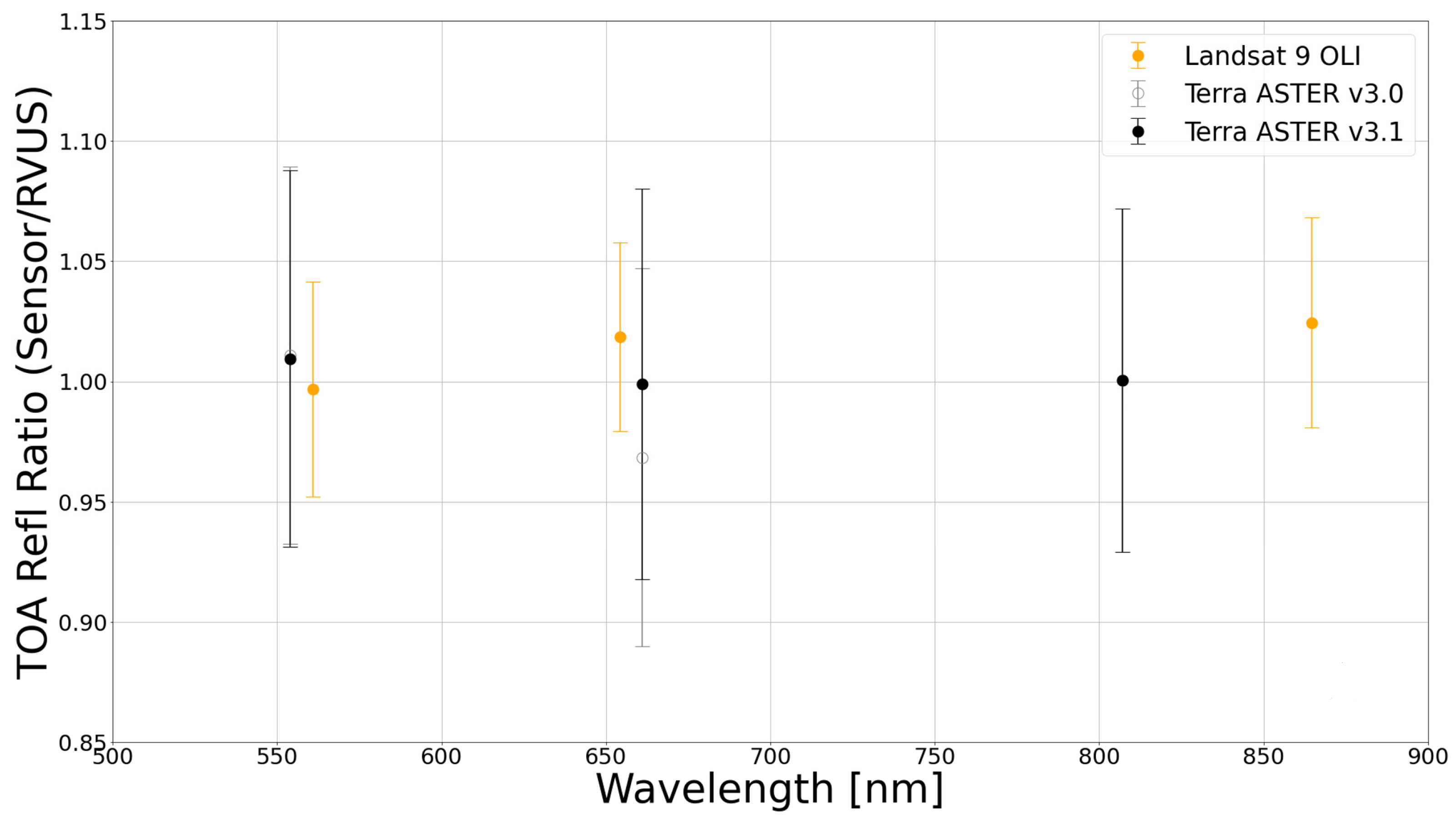
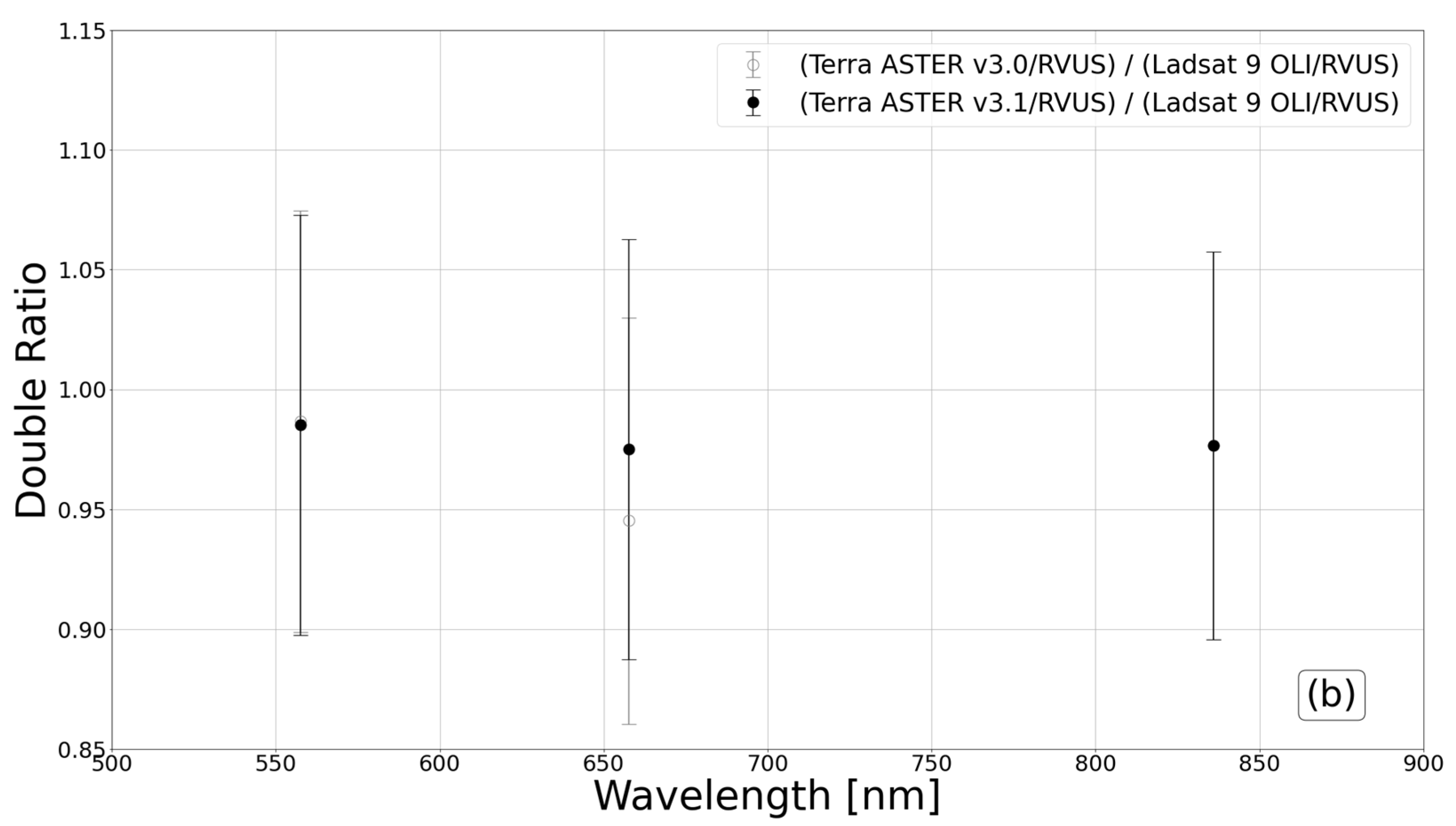
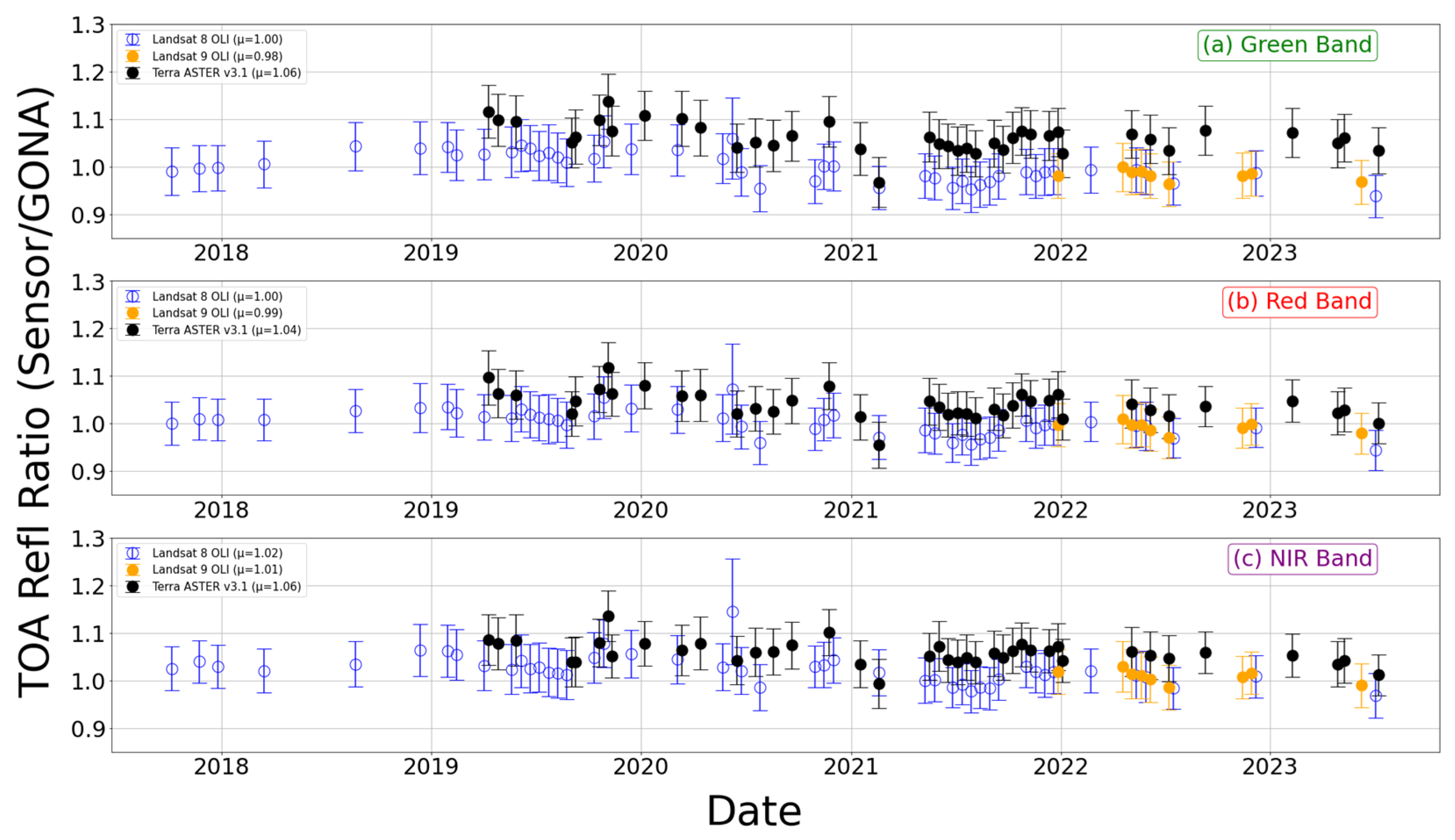
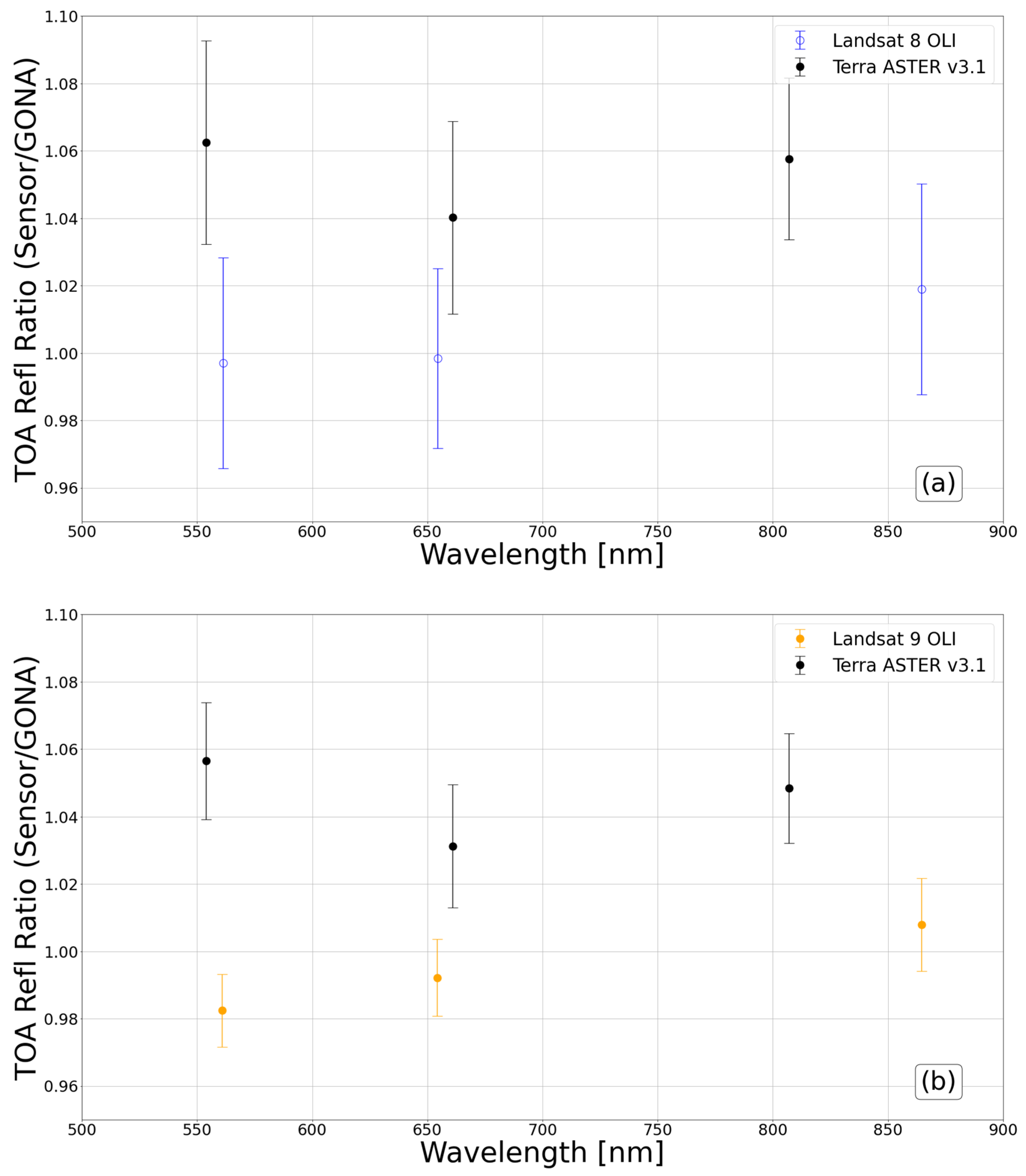
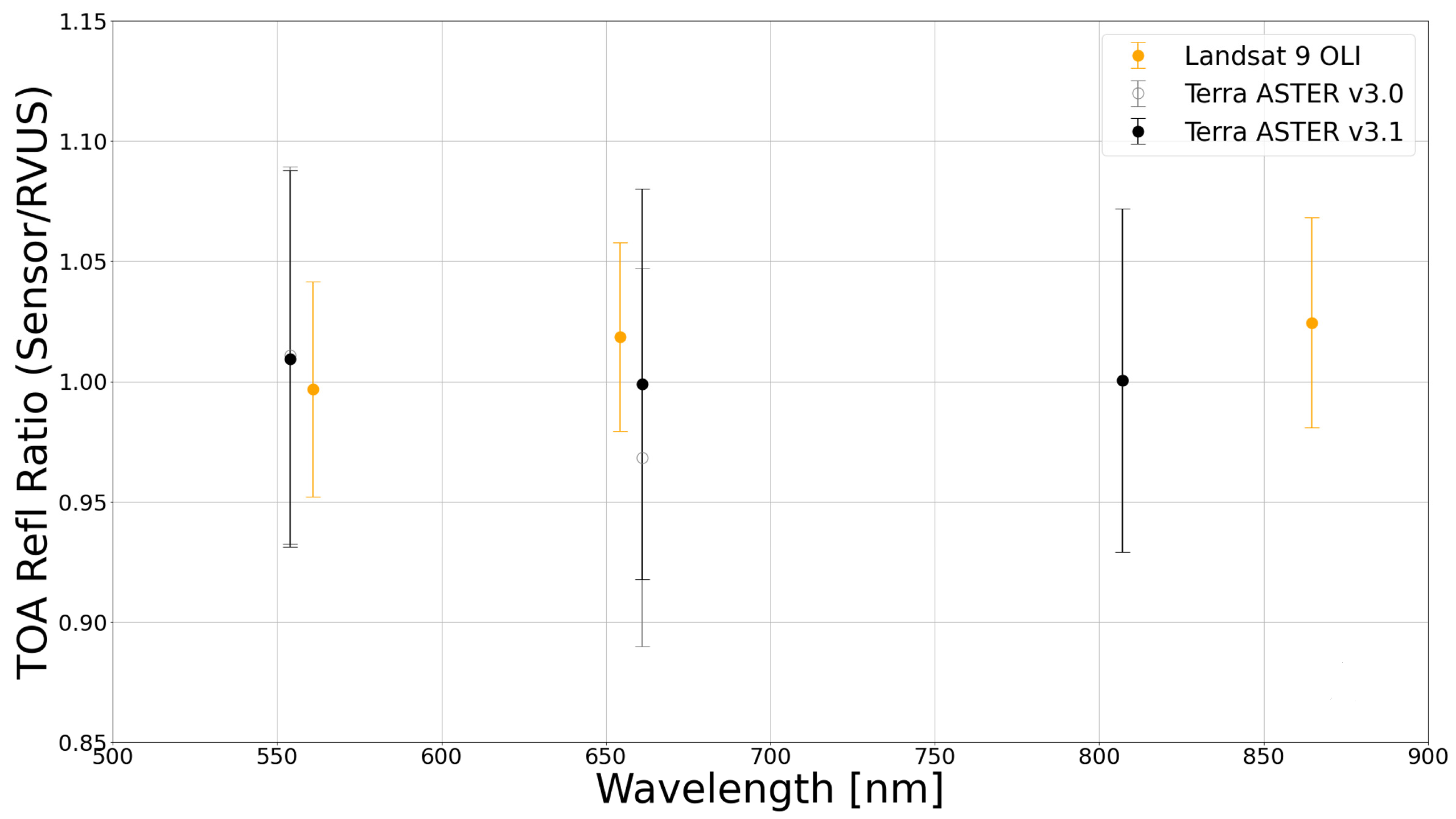
A benefit of this study is that it shows that the ASTER sensor’s radiometric calibration remained stable across the orbit-lowering maneuver that took place in October 2022. The results also show that both the v3.0 and the updated v3.1 ASTER data agree with the RadCalNet results, and it is recommended that users rely on the v3.1 since it provides an improved consistency in the red band with the other two ASTER bands. The temporal results from the RadCalNet comparisons show that neither the ASTER nor the L8 OLI or L9 OLI data products are changing in time in a systematic fashion, which indicates that the radiometric calibration of both sensors is well understood by their respective instrument teams. Comparisons of the 10-year averages of the ratio to RVUS RadCalNet indicate that OLI and ASTER agree to within 7% in all spectral bands and 4% in the closely matched green, red, and near-infrared bands. Similar results are obtained with the much shorter time history of L9 OLI, indicating that a sufficient number of data sets can be obtained within 18 months to develop a reliable comparison between multiple sensors using RadCalNet data. In summary, RadCalNet has been shown to play a crucial role in the intercomparison, calibration, and validation of remote sensing sensors, and users can be confident that applications relying on ASTER, L8 OLI, and L9 OLI will not be affected by absolute radiometric calibration differences between sensors.

 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}