1. Introduction
Floods are the most frequent and costly natural hazard worldwide, causing fatalities and significant economic damage in both rural and urban environments [
1]. According to the Emergency Events Database, floods were the most common natural hazards in 2022, with 176 large events occurring worldwide, approximately 8000 deaths, and more than 57 million people affected [
2]. Unfortunately, global temperature increases are generating widespread shifts in weather systems, making events such as floods more frequent, intense, and unpredictable [
3]. The timely detection and monitoring of flood-prone areas are crucial for effective disaster management and response [
4]. In recent years, remote sensing (RS) technologies have emerged as powerful tools for flood monitoring, with Synthetic Aperture Radar (SAR) at the forefront [
5].
SAR imagery has indeed proven to be a powerful and effective approach for flood mapping [
6,
7,
8]. Unlike optical sensors, SAR can penetrate clouds, rain, and vegetation, providing all-weather and all-day imaging capabilities [
9], thus allowing for the detection and characterization (extent, dynamics, and severity) of flooded areas at high spatial resolution [
10,
11,
12,
13].
The main limitation, especially in the past, of using SAR data for flood detection and monitoring purposes, namely their low temporal resolution, has been recently addressed by the implementation of several constellations of satellites sharing the same payload and orbit with a phase shift that allows for at least half of the temporal resolution when two satellites are present [
14]. An example of such a constellation is represented by the Sentinel-1A (S-1A) and Sentinel-1B (S-1AB) satellites, which belong to the European Space Agency (ESA) Copernicus program and are equipped with a SAR system operating in the C-band (5.6 GHz) [
15]. Each SAR has a spatial resolution of 10 m, while the nominal temporal resolution of each of the two S1 satellites is 12 days, which is reduced to six days when the two satellites are working together. This resolution increases at higher latitudes and over Europe, which are sampled more frequently than other locations in the world [
14].
Various approaches have been employed for flood mapping using SAR imagery [
8,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21]. One commonly employed method is image differencing, which involves comparing pre- and post-flood SAR images to identify changes in the backscattering characteristics [
12,
13,
16]. This approach was recently used by Hung and Jin [
22], who analyzed multi-temporal Sentinel 1 data and highlighted the relevance of temporal analysis for effectively detecting and mapping floods. However, it is important to note that flood-affected pixels may exhibit signals similar to other features, such as high-altitude regions or shadows [
18]. Thresholding is another approach in which a threshold value is set to distinguish between flooded and non-flooded areas based on the SAR image intensity values. Pixels above the threshold are classified as flooded, while those below are classified as non-flooded. This technique was recently applied to the historical Sentinel 1 data by Uddin et al. [
23] for rapid flood mapping. However, this method has limitations when it comes to detecting water through dense vegetation [
18]. Machine learning and data fusion techniques have been employed for flood mapping using Sentinel-1 data. Hitouri et al. [
24] used training algorithms to classify flooded and non-flooded areas based on a combination of SAR data, ancillary data, and historical flood information. Another study by Gebrehiwot et al. [
25] presented a method for flood extent mapping using an ensemble CNN model, further illustrating the use of advanced machine-learning techniques for flood detection. However, training these models requires large amounts of labelled data, which can be difficult to obtain.
This work introduces the SAR-Based Robust Satellite Technique-FLOOD (SAR-RST-FLOOD), a novel approach that utilizes SAR data to enable the accurate and timely detection of flooded areas. RST-FLOOD has been successfully applied to optical sensors data, such as those acquired by the Advanced Very High Resolution Radiometer (AVHRR), Moderate Resolution Imaging Spectroradiometer (MODIS), and Visible Infrared Imaging Radiometer Suite (VIIRS), to detect and monitor flood events by exploiting the typical behavior of water in the visible–near-infrared spectral region [
26,
27,
28]. It is a multi-temporal approach aimed at the preliminary characterization of the investigated signal at the pixel level in unperturbed conditions, and then the identification of any signal transient as statistical deviation from these “normal” conditions [
29]. In this study, the RST algorithm was applied for the first time to SAR data, particularly to backscattered signals, to identify flooded areas. One of the key advantages of the RST approach is its robustness against various environmental factors such as vegetation, topography, and weather conditions. On the other hand, one of the main limitations that has hampered the application of RST to SAR data so far is the computational effort, in terms of both data storage and processing, needed to analyze long-term series of backscatter signals over large areas.
In this study, we addressed this issue by leveraging the remarkable capabilities of the Google Earth Engine (GEE) cloud-based geospatial processing platform [
30], which allowed us to implement our methodology in a streamlined and efficient manner. GEE revolutionizes the field of geospatial analysis by offering an intuitive and user-friendly interface, allowing us to explore and process data with ease while obtaining results at both regional and global scales [
30,
31,
32,
33]. One of the key advantages of GEE is its ability to handle massive datasets, thereby facilitating informed decision-making and comprehensive analysis [
26]. A remarkable feature of GEE is its vast geospatial data repository, which includes constantly updated Sentinel-1 GRD (“Ground Range Detected”) data [
14]. The availability of analysis-ready SAR datasets in GEE has greatly simplified the complex SAR pre-processing procedures, opening new avenues for SAR-based geospatial analysis.
SAR-RST-FLOOD was implemented in GEE, allowing us to develop an automatic method that can be applied anywhere. To validate the effectiveness of the proposed algorithm, extensive experimental evaluations were conducted using Sentinel-1 SAR data from different satellite missions, including the Copernicus Emergency Management System (CEMS) Mapping database [
34]. The results demonstrate that the algorithm is highly accurate in detecting flooded areas and can provide timely information to aid disaster response and management efforts.
4. The RST Approach
The RST algorithm is an automatic multi-temporal change-detection method that has been extensively tested for detecting various environmental hazards [
29,
50]. The method is based on the preliminary identification of “normal” (i.e., unperturbed) values of the investigated signal that should be compared with the signal at hand for the detection of any significant, from a statistical point of view, anomalies. Such an analysis is performed at the pixel level and requires the preliminary generation of a homogeneous long-term satellite database. Homogeneity in the spatial domain is ensured by always considering the same area (and pixels), whereas homogeneity in the temporal domain is ensured by collecting data belonging to the same calendar month and acquired at the same time of day (or in the same orbit). The change detection step is performed by implementing the Absolutely Local Index of Change of Environment (ALICE) index (1), as in the following [
50]:
where
V(
x,
y,
t) is the signal measured at time t for each pixel (
x,
y) of the analyzed satellite scene, and
µV(
x,
y) and
σV(
x,
y) represent the temporal mean and standard deviation, respectively, which are computed by processing the above-mentioned homogeneous multi-temporal dataset of the collected satellite data [
29]. The Alice index, by its inherent design, is intended to be a standardized variable that exhibits Gaussian behavior, with a mean close to 0 and a standard deviation close to 1. Consequently, a higher absolute value of the index indicates a lower probability of its occurrence [
50].
In its first implementation on SAR data, performed in this work, the signal under investigation is the backscatter measured by Sentinel 1, with the prescriptions for the used data indicated as follows. It is worth mentioning that the backscatter intensities are influenced by the characteristics of the surface, including its roughness, composition, and presence of water. In the absence of flooded areas, these characteristics can be considered constant if the same pixel is viewed with the same geometry during the same period of the year. Therefore, in the absence of any other perturbations, signal anomalies, if detected, can be related to the presence of flooded areas. Considering the incidence angle, its similarity along the temporal series accounts for shadowing and layover effects, enabling accurate differentiation between flooded and non-flooded regions [
51]. As already mentioned, the RST approach implementation requires computational capability to increase on the basis of the spatiotemporal and resolution of the investigated data, as well as on the length of the historical series analyzed. These factors, together with the limited accessibility of radar data, have prevented the application of RST to raw SAR data. This study represents the first attempt to analyze a historical series of backscatter values following RST prescriptions and exploit its inherent advantages.
5. The Methodology
The workflow followed in this study was implemented using the Google Earth Engine platform and deploying the JavaScript programming language. The workflow was divided into five stages (
Figure 2), described in the following, to ensure a systematic and comprehensive approach to flood detection (
Figure 2).
5.1. Sentinel-1 Data Selection and Pre-Processing
The main features of the used Sentinel-1A and 1B have already been mentioned. By exploiting the GEE platform, IW GRD scenes with VH polarization were selected for the areas under investigation. Temporal selection was performed by focusing on the month/s of event/s analyzed in a multi-temporal framework. To ensure the reliability of our results, we implemented a filtering process to exclude poor-quality images from the collection. This step was crucial to avoid potential inaccuracies and inconsistencies in the data used in the analysis. A total of 475 images stratified based on the calendar month of event occurrence were analyzed.
Several pre-processing steps were automatically executed within the GEE platform to enhance SAR image quality. These steps include thermal noise removal, data calibration, multi-looking, and range Doppler terrain correction. However, to further improve SAR data quality, additional pre-processing steps are necessary. The Committee on Earth Observation Society (CEOS) Analysis-Ready-Data for Land (CARD4L) recommends several supplementary pre-processing techniques, including border noise removal, speckle filtering, and radiometric terrain correction [
52]. For speckle filtering, we employed the Refined Lee filter [
53], which was originally introduced by [
54], and we used this filter at a kernel size of 7 × 7. To address the influence of topography on SAR backscatter, we implemented radiometric terrain correction based on the approach proposed by Hoekman and Reiche [
55], as implemented by [
56,
57]. This approach incorporates an angular-based correction that considers the angular relationships between the SAR image and terrain geometry. We utilized the SRTM dataset at a resolution of 1 arc-second (30 m), which is readily available in GEE [
58]. The latter was replaced by our DEM with a higher resolution of 10 m, where it was available. The primary objectives of these pre-processing steps are to mask and exclude pixels located in the active layover and shadow areas of the image [
55,
59]. Following the completion of the pre-processing steps, we converted the output to a logarithmic scale of dB. This conversion facilitates clearer visualization and enhances image interpretability.
5.2. RST Methodology Implementation
The historical series of S1-GRD images with VH polarization was used as the input to implement the RST methodology. As described above, such an activity encompasses two main steps: (i) the identification of the expected values at the pixel level (i.e., temporal mean and standard deviation) for the investigated signal (i.e., the backscattering σ0); (ii) and the ALICE index computation for all the S1 images useful to characterize the analyzed flood events.
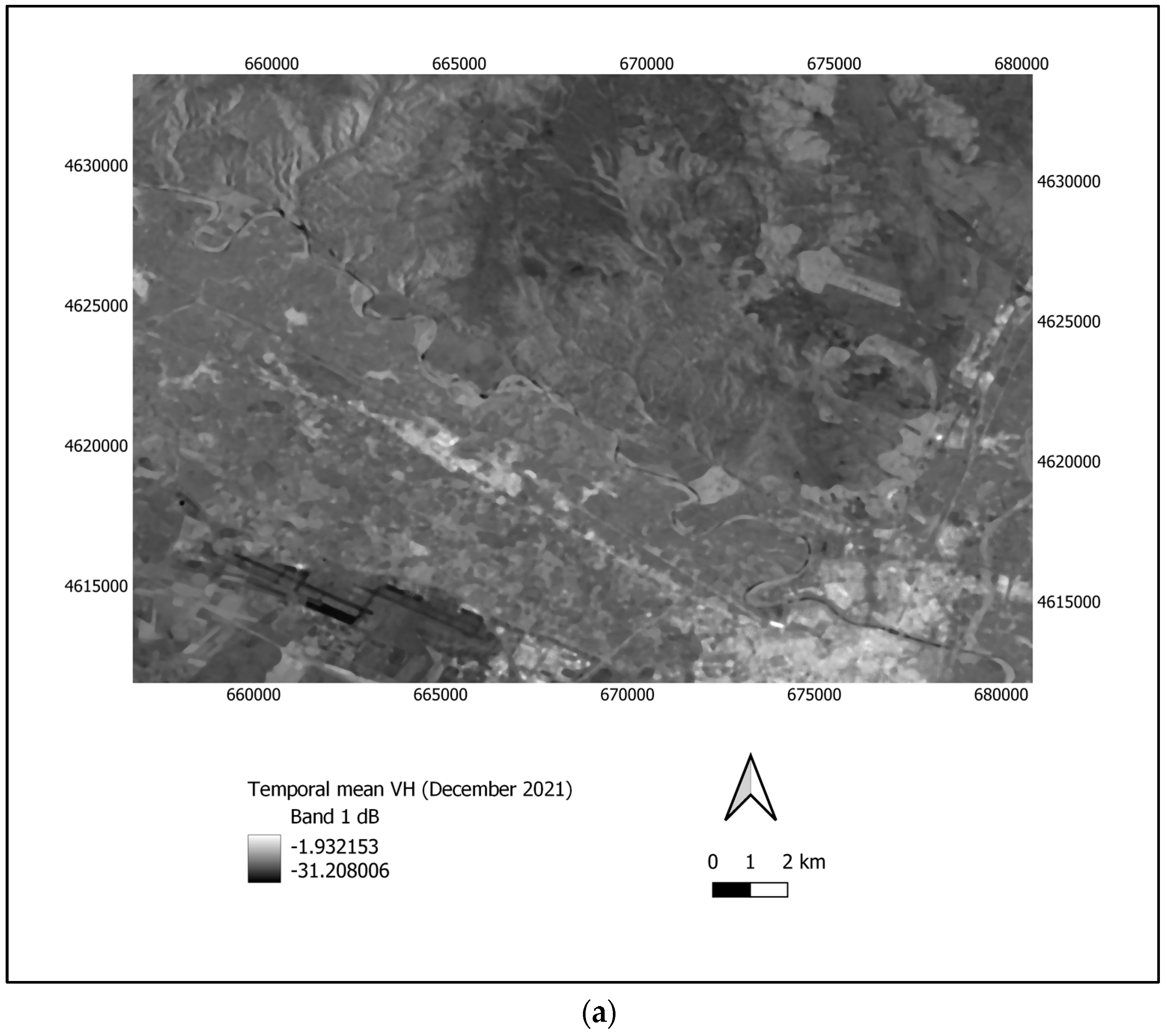
In
Figure 3, two examples of the ten maps (one temporal mean map plus one standard deviation map for five events) produced in the first step are shown. These maps refer to the two outputs produced for analyzing the Zaragozza Ebro River event (December 2021). They were obtained by analyzing at the pixel levels all S1 GRD IW data collected in the calendar month of December from 2014 to 2023. Similar maps, which are not shown for the sake of brevity, were produced for all other events.
Using these maps as reference signals, the ALICE maps for all images in
Table 2 were computed, highlighting values higher than two, whose probability of occurrence was less than 3% for inherent construction [
29,
50]. These maps were used as inputs in the next step to produce the final flood maps.
5.3. Post-Processing
To enhance the quality of the flood extent layer and reduce the number of false positives, we used additional datasets and applied post-processing steps. First, we used the global surface water dataset (GSW) [
40] to distinguish between permanent and semi-permanent water bodies. This dataset provides comprehensive maps of surface water location and temporal distribution and offers valuable statistics on the extent and changes in water surfaces over time. To identify areas with permanent or semi-permanent water bodies, we used the seasonality band within the dataset. This band provides information on seasonality, ranging from 0 to 12 months, allowing us to effectively mask out areas with consistent water presence throughout the year. By leveraging this dataset and incorporating seasonality information, we aimed to accurately delineate and analyze the distribution of permanent and semi-permanent water bodies, contributing to a better understanding of global surface water dynamics.
We then employed topographic filtering techniques based on the elevation data from the DEM obtained from the HydroSHEDS dataset [
39]. By setting a threshold slope percentage, we identified areas where the slope exceeded a certain value. These steep areas were considered unsuitable for flooding because water naturally flows away from them. By filtering these incorrectly flooded pixels, we aimed to improve the accuracy of our flood detection analysis. The inclusion of topographic information through the DEM allowed us to refine the flood mapping process and focus on areas where flooding is more likely to occur, enhancing the reliability of our results.
Additionally, we used information provided by the MERIT hydro dataset [
41]. To detect permanent water bodies, we focused on the “wet” band, where land areas are represented by 0 and permanent water bodies by 1. Furthermore, using this dataset, we implemented a 2 km buffer to specifically highlight rivers while eliminating any false positive water detections. This approach allowed us to accurately identify and visualize river networks while ensuring the exclusion of non-river water features.
5.4. Validation
The final step of this study involved validating the processed flood extent maps generated in previous stages. The accuracy of the SAR-RST-FLOOD approach was assessed using various methods and a range of reference datasets, including reliable flood information from CEMS.
We assessed the accuracy of the flood maps by comparing them with the same Sentinel-1 imagery taken on the same date using another approach, such as the automatic threshold method provided by the CEMS. In cases where we were unable to find a Sentinel 1 image for the same date, we assessed the accuracy of the flood maps by comparing them with different types of images, including ESRI World Imagery, COSMO-SkyMed, Radarsat-2, and other satellite images, and then with the provided ground truth information regarding floods in the TIF files containing flood extents. Through these rigorous validation processes, we aimed to ensure the reliability and precision of the flood mapping results obtained using the SAR-RST-FLOOD approach.
The agreement between the two mapping approaches was assessed using a confusion matrix that served as a concise summary of the classification model predictions, indicating the numbers of correct and incorrect predictions. By analyzing the values in the confusion matrix, various metrics were calculated to assess the agreement between the two mapping approaches ([
18], such as the user’s (UA), producer’s (PA) and overall accuracy (OA), as well as the Kappa index (K), as described in the following.
where
A is the number of pixels considered flooded by both the RST and the reference map,
B and
C are the “False” negative or positive RST detection (considering the reference map as the true), and
D represents the pixels that were not recognized as flooded by both methods. In Equations (2) and (4),
f is for “flooded”, whereas in Equations (3) and (5),
nf is for “not flooded”.
7. Discussion
SAR data have been largely used for flood detection purposes owing to their capability to provide detailed all-day and all-weather information. The Copernicus program, as well as the Cosmo Sky Med mission [
65] have facilitated the acquisition of data with good temporal resolution, owing to the presence of several satellites sharing the same payload. One residual limitation related to the intensive computational tasks related to the pre-processing of SAR data, especially when long-term series are analyzed, has been recently faced thanks to the availability of advanced computing platforms, such as Google Earth Engine.
In this study, GEE has facilitated the implementation of a multi-temporal approach, RST-FLOOD, on a historical series of S1 data to map different flooding events that have occurred in Europe in recent years. Among the dozen events available, whose analysis would have clearly not been feasible and out of the scope of the study, we selected five flood episodes representative of a wider range of characteristics in terms of the area affected, precipitation, and damage. Moreover, detailed reference data were available for these events, making them useful in terms of assessing the accuracy of the proposed methodology. To this end, in the absence of in situ data, we used other maps and information made available by the Copernicus Emergency Mapping System. In any case, it is worth saying that accurate ground measurements of flood extent are difficult to obtain because of meteorological and safety conditions [
66], and they are usually collected with a time delay with respect to satellite acquisition, which could lead to misclassification due to flood dynamics [
18]. Therefore, using remote sensing data/products as reference maps, such as those provided by the CEMS, still represents a viable alternative [
14,
17,
18,
67], even if also these products may lack accuracy depending on the quality and sensitivity of the considered data and method of analysis.
The obtained results, when compared with CEMS maps/information, indicate the feasibility of the proposed approach. In more detail, considering all the analyzed events together, a Kappa index value of 0.78 and an overall accuracy of 0.96 were found, suggesting the good reliability of the method. Similar confirmations arose from the analysis of the Uaf and Paf mean values, equal to 0.78 and 0.90, respectively. Such good results have been obtained notwithstanding several issues typically affecting the accuracy of flood disaster information [
18], such as the high heterogeneity (spatial resolution, date of acquisition, etc.) of the considered reference maps, ranging from S1 images to S2, RADARSAT, and ground data, as well as the methods used for detecting flooded pixels. In any case, other events should be investigated in the future to further confirm such results. Owing to its implementation within the GEE platform, where all other ancillary data used to increase the quality of the results are also present, the proposed approach can be easily applied on a global scale and can provide crucial information for remote areas characterized by the presence of ungauged and/or poorly instrumented basins. In these areas, as well as for those where a violent and/or extreme event, such as a flood, can destroy the ground monitoring system, satellite data can represent the only source of information available [
68]. Furthermore, the processing of dense SAR time series is performed in a short time, allowing for the rapid production of results. The technique is completely automatic and unsupervised and does not require a preliminary selection of a baseline or human support.
Once the accuracy of the proposed approach in mapping flood events was assessed, its potential for monitoring purposes was investigated. To this end, we analyzed the last of the considered test cases in greater detail, i.e., the Ebro River event that occurred around Zaragozza in December 2021. Two other S1 images were available after the one of 16 December 2021, already analyzed (
Figure 8). The first one was acquired on 17 December 2021 by S1A and the second on 22 December 2021 by S1B. The results of the RST-SAR-FLOOD application for these two images are shown in
Figure 9a,b.
A clear reduction in the flooded areas is evident in the two maps, especially in the second one, highlighting the zones most affected by the flood, whose presence was still evident one week after the first detection. This information, typically acquired when a meteorological perturbation is still present and hence prevents optical data acquisition, is fundamental to better manage recovery actions, as well as to delineate clear flooding scenarios useful for implementing future mitigation activities.
The availability of more images, together with other information acquired remotely or in situ, such as the measurement of rainfall spatial and temporal variability, is fundamental for modelling and reconstructing catastrophic flooding events [
68]. The integration of human observations (crowdsourced data) may further help to validate complex flooding events in data-scarce areas with unavailable gauged records [
68,
69,
70]. Finally, it should be stressed that accurate indications about the areas affected by a flood event are fundamental to developing flood hazard maps that are useful for risk-aware analyses and designs [
71]. In this context, the development of probabilistic approaches and stochastic techniques for flood hazard assessment may improve the definition of flood risk scenarios [
71].
The implementation of the proposed methodology was made possible by the concurrence of two factors. The European Union’s choice to make all the data collected within the Copernicus program open and freely available represents an innovative idea that has allowed for the growing use of these data in the everyday life of each kind of potential stakeholder, from local regional authorities to the general public [
72], as well as the development of several downstream applications. This has been facilitated and accelerated by the development of cloud computing systems, such as GEE, which permits “easy” access to and processing of these data [
33], overcoming one of the main barriers to a more systematic use of Copernicus data/products [
72].
The potential limitations of the RST-SAR-FLOOD method may be represented by a reduced capability to investigate floods occurring in urban areas, mountainous regions, and coastal zones, where the discrimination between flooded pixels and others showing similar characteristics could be more complicated [
18]. Another issue of the proposed approach is represented by the current temporal resolution of Sentinel 1 data. S1B, launched in April 2016, stopped working on 23 December 2021, soon after the acquisition of the image analyzed in
Figure 9, due to a failure of the electronic power supply to the instruments [
54]. The ESA is currently working on the launch of Sentinel-1C as soon as possible to re-establish the satellites constellation [
73]. Until S1C will not be operational, the nominal temporal resolution of S1 mission will remain 12 days, limiting the capability of such a system in providing timely information about processes in progress on the surface of the Earth.
8. Conclusions
In this study, the RST-FLOOD method, which has already proven successful in detecting and monitoring flood events using optical data, was applied to Synthetic Aperture Radar (SAR) data for the first time. Sentinel 1 data, freely provided by the Copernicus program, were used for this aim, exploiting the potential of the Google Earth Engine platform. Five test cases were evaluated by comparing the results of the SAR-RST-FLOOD method with those provided by the Copernicus Emergency Mapping System. The user accuracy values ranged from 0.58 to 0.97, with an average value of 0.78, producing accuracy values from 0.69 to 0.98, with an average value of 0.90, and the K values ranged from 0.68 to 0.87, with an average value of 0.78.
These satisfactory results, achieved notwithstanding the discrepancies in terms of spatial resolution, time of acquisition, and method used between the two datasets, indicate the good performance of the proposed approach. Moreover, they highlight the main advantage of a multi-temporal approach, such as the one presented here, with respect to traditional techniques, namely its capability to automatically define local (i.e., at the pixel level) adaptive thresholds useful for the robust identification of flooded areas, reducing the occurrence of false detections. In addition, the strong capability of providing useful information about flood dynamics due to the good temporal resolution provided by the S1 constellation, when fully operational, was also demonstrated. Frequently updated and accurate indications about flood extent during crises are crucial to overcoming the issues related to the poor accessibility of the areas affected by the event, as well as the potentially bad functionality of ground monitoring systems.
The high computing potential of the Google Earth Engine platform allows for the rapid generation of results, making the proposed approach suitable for near real-time activities in support of disaster monitoring and management activities. Timely and accurate information about flood extent and evolution is fundamental not only during the emergency phase, when they can allow for better management of the crisis by decision makers, but also in the recovery phase, to develop accurate flood hazard maps that are useful for mitigating the flooding risk for the areas affected by the flood. Considering that the developed system is already filled with all the information useful for its implementation, its potential to be applied on a global scale as well as to support the management of ungauged or remote basins are evident. Local and regional public authorities and institutions can take advantage of our research by integrating the information provided with those by traditional approaches to obtain a clearer understanding of the event in progress.
Future analysis will focus on assessing the capability of the SAR-RST-FLOOD approach to detect floods in urban areas, mountainous regions, and coastal zones, trying to implement a method that can be applied everywhere with a constant level of accuracy.



 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}