
RAP-MAC: A Robust and Adaptive Pipeline MAC Protocol for Underwater Acoustic String Networks

 ,
,  ,
,
Abstract
1. Introduction
- In order to establish a practical UA-SN in real-world scenarios, taking into consideration the network features, channel characteristics and physical layer parameters, a systematic cross-layer optimized RAP-MAC is proposed. The RAP-MAC protocol design is characterized by four key highlights: parallel transmission method to prevent conflicts and improve network throughput, network regulation strategy to enhance the controllability of the network, cross-layer optimized rate adaptation algorithm to improve the adaptability to ever-changing ocean environment, and fault recovery algorithms to increase the network robustness. The comparative analysis with PMAC [16] through simulations confirmed the adaptive ability to environment changes and the fault recovery ability of RAP-MAC.
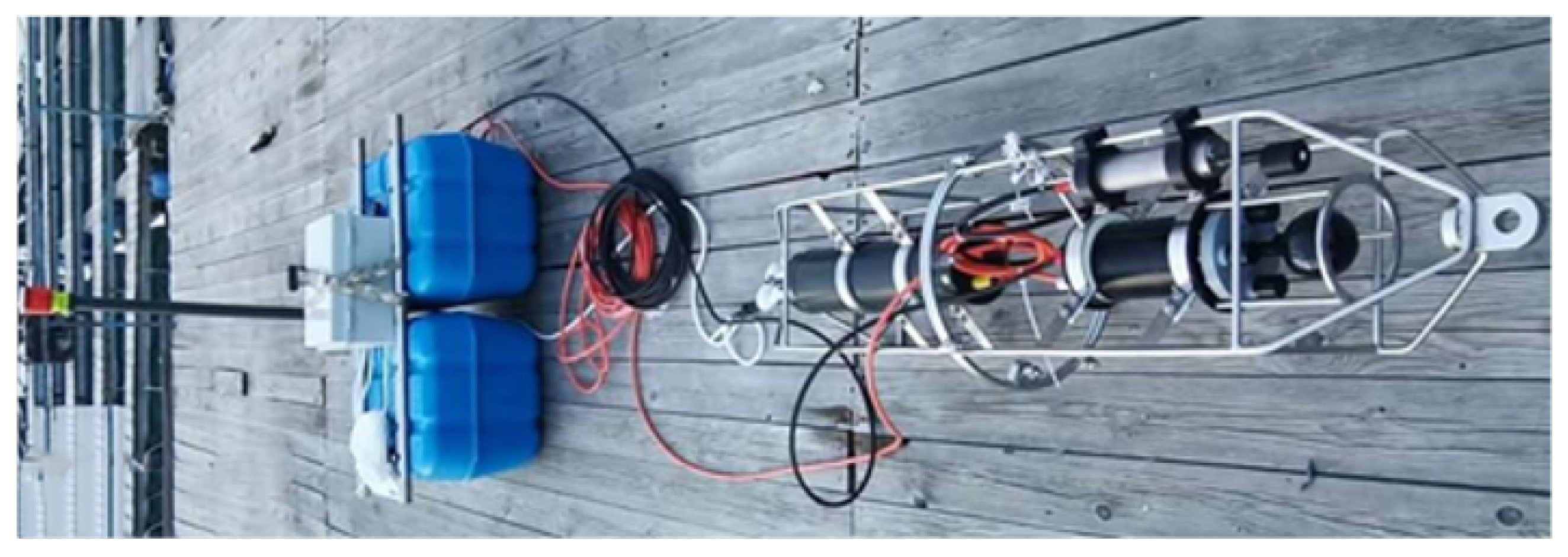
- Many existing research works on underwater networks are simulation-based, with few network systems conducting experiments in real ocean environments. In order to further validate the practicability of RAP-MAC, we established the UA-SN with 21 nodes in the selected areas of the North Sea and the South Sea of China for experiments respectively. The sea trial verification took nearly a month, during which we mobilized more than 40 people and 25 boats. Through a great deal of effort, the experimental results from two sea areas fully demonstrated good performance of the UA-SN using RAP-MAC from the abovementioned four aspects.
- The experiment result of a communication distance of 87 km and a throughput of 601.6 bps for UA-SNs is unparalleled. In our best effort, no other network systems in the current published research have achieved such a communication distance with such a comparable throughput. Furthermore, this achievement exceeds the recognized upper limit of underwater acoustic communication test performance by 40 km·kbps.
2. Related Work
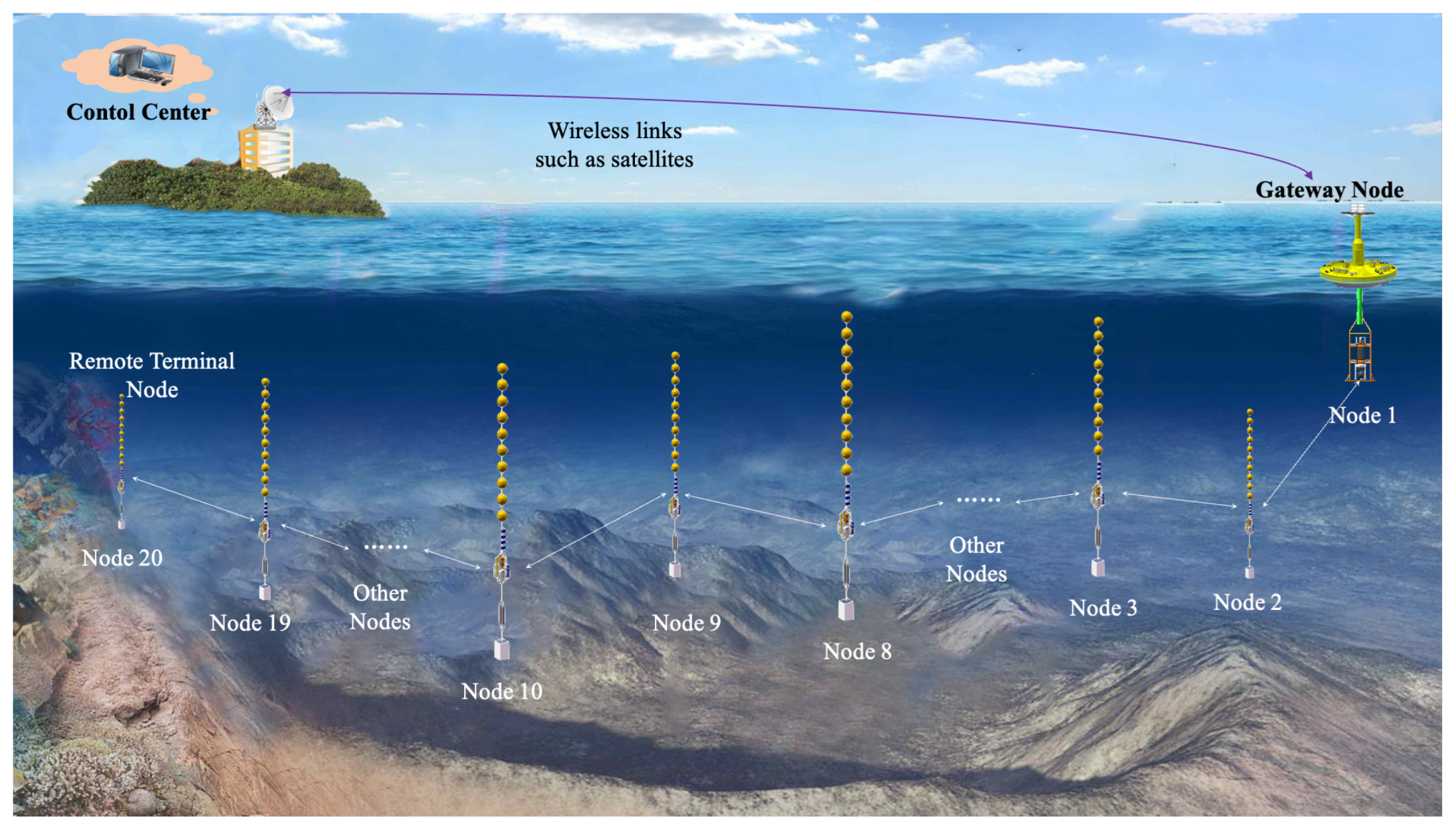
3. Application Scenario and Network Architecture
- Efficiency: how to effectively organize the data transmission of each node to avoid data conflicts, while maximizing network throughput;
- Reconfigurability: how to improve the network’s flexibility, scalability, and controllability;
- Adaptability: how to enhance the network’s adaptability to different underwater environments;
- Robustness: how to ensure network connectivity in the event of node failures or link interruptions.
4. Design of RAP-MAC
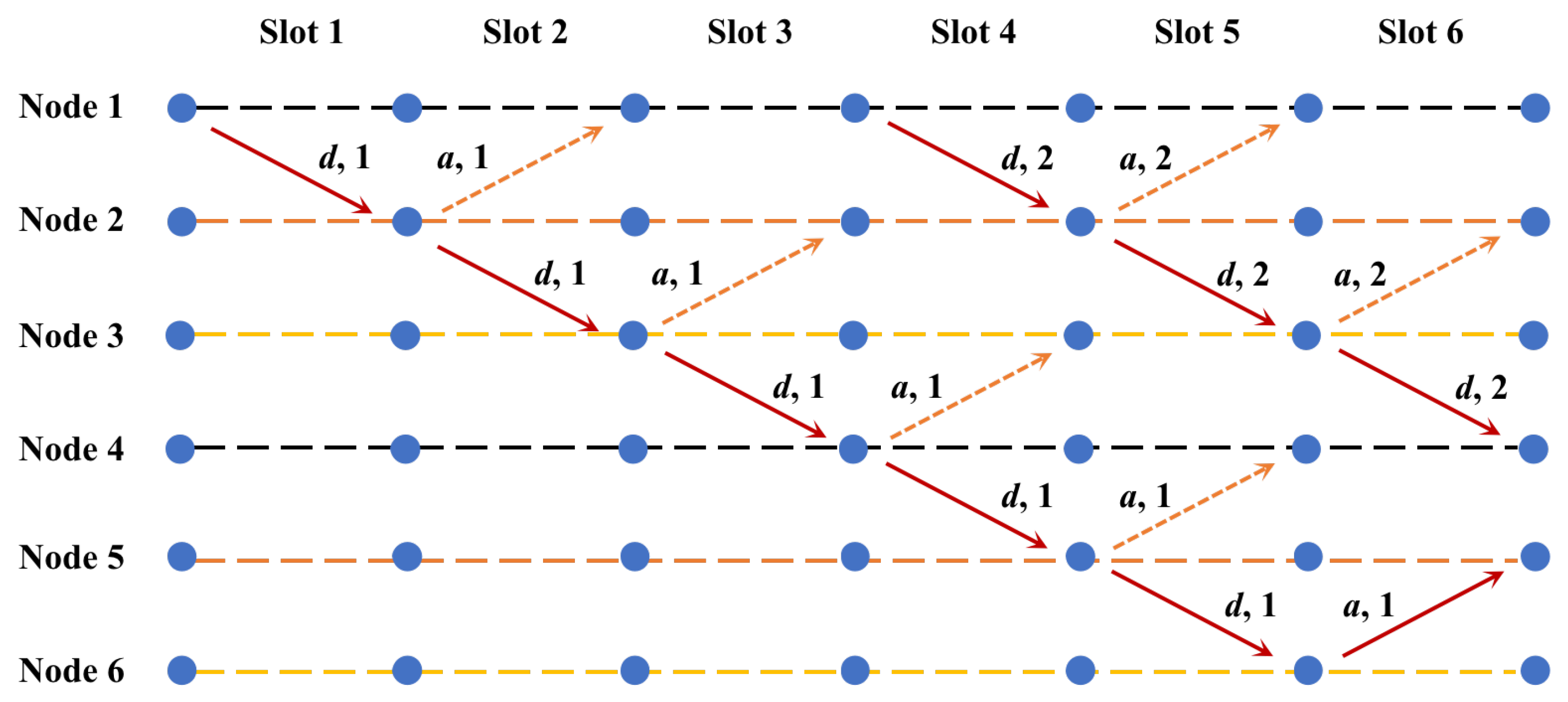
4.1. Efficient, Reliable, and Conflict-Free Data Transmission Strategies
4.2. Strategies to Improve the Reconfigurability
4.3. Strategies to Enhance Adaptability to Dynamic Environments
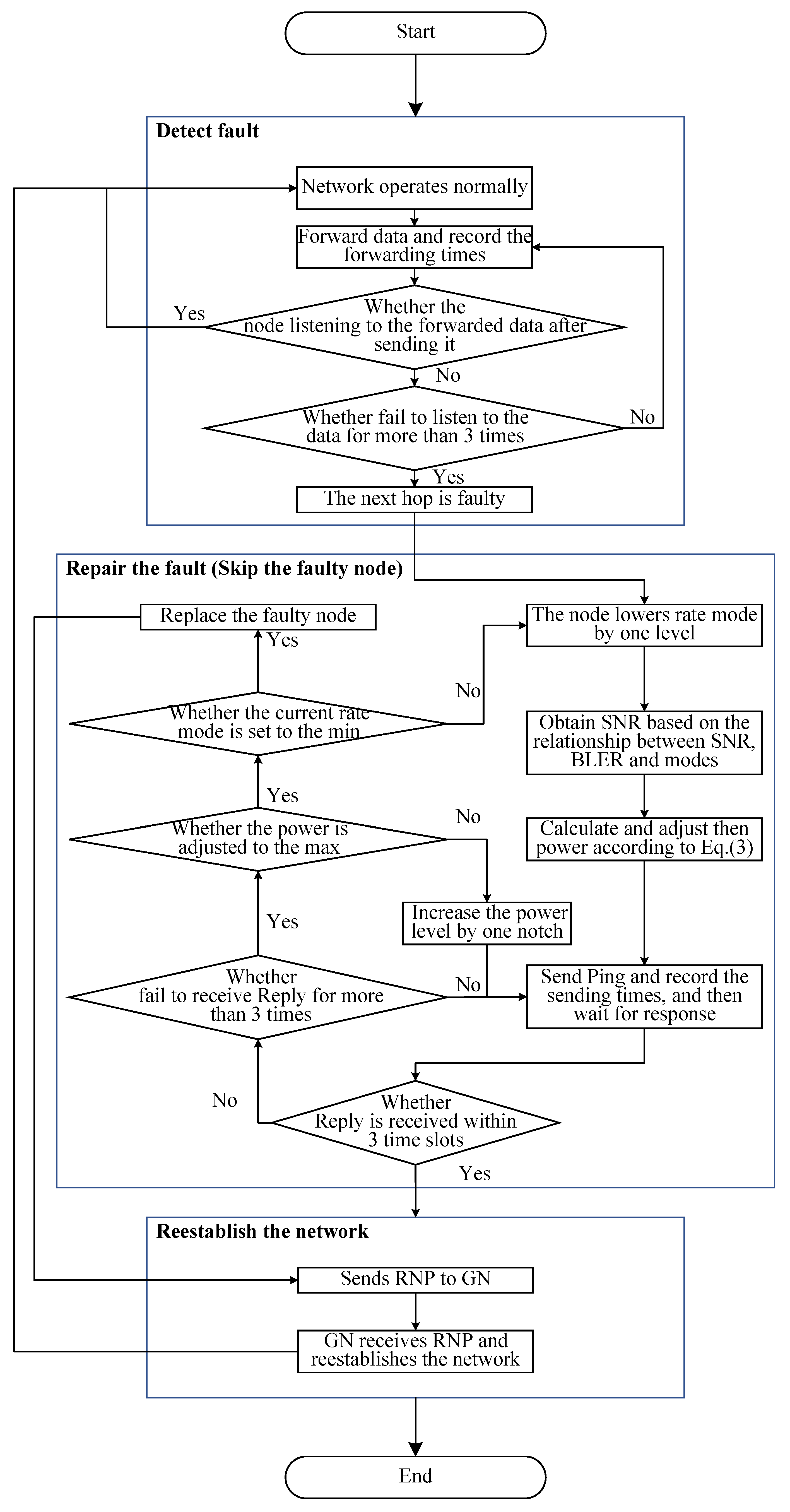
4.4. Strategies to Improve Robustness
5. Experiments and Results
5.1. Performance Metrics
5.2. Simulation Experiments
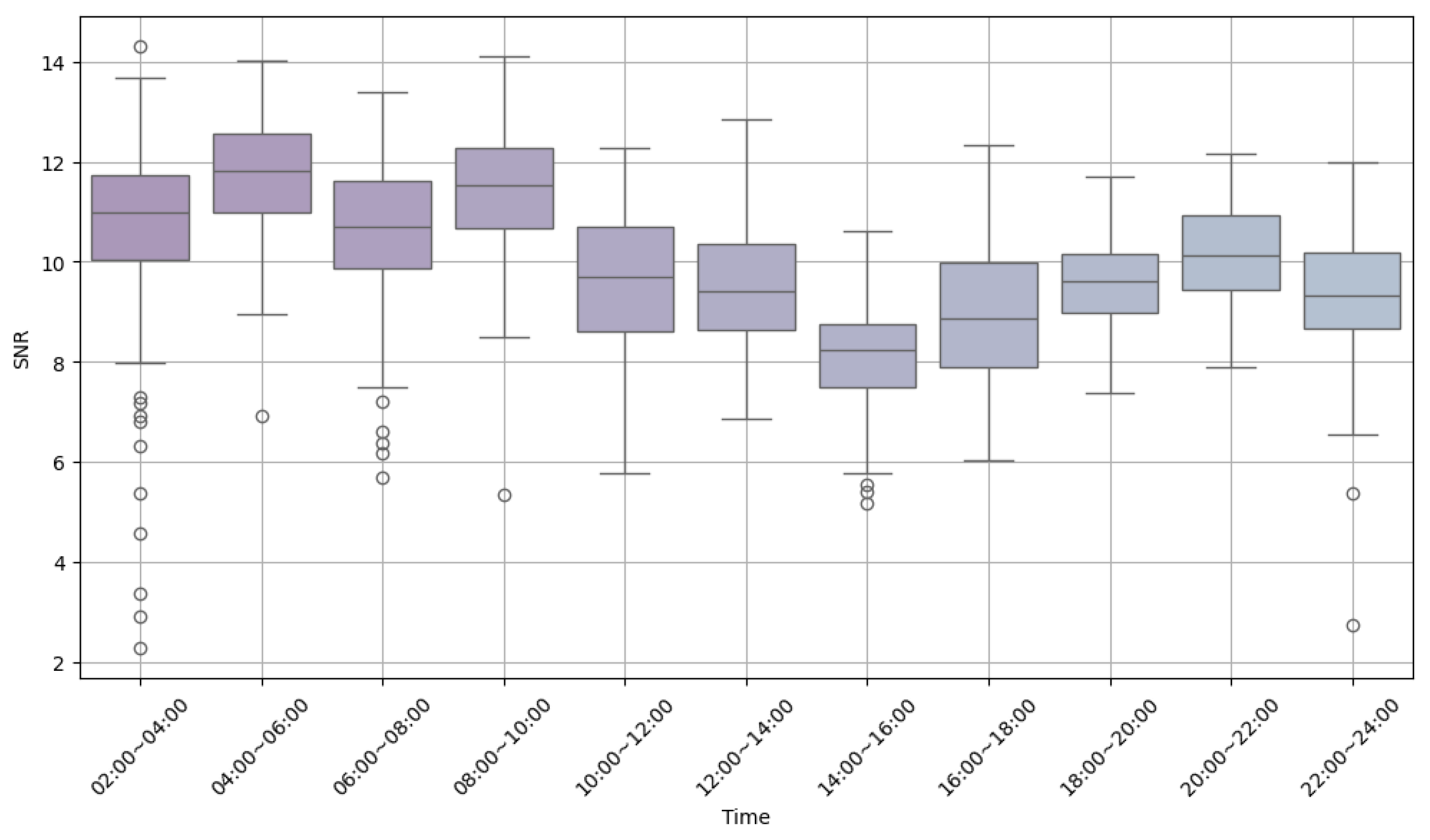
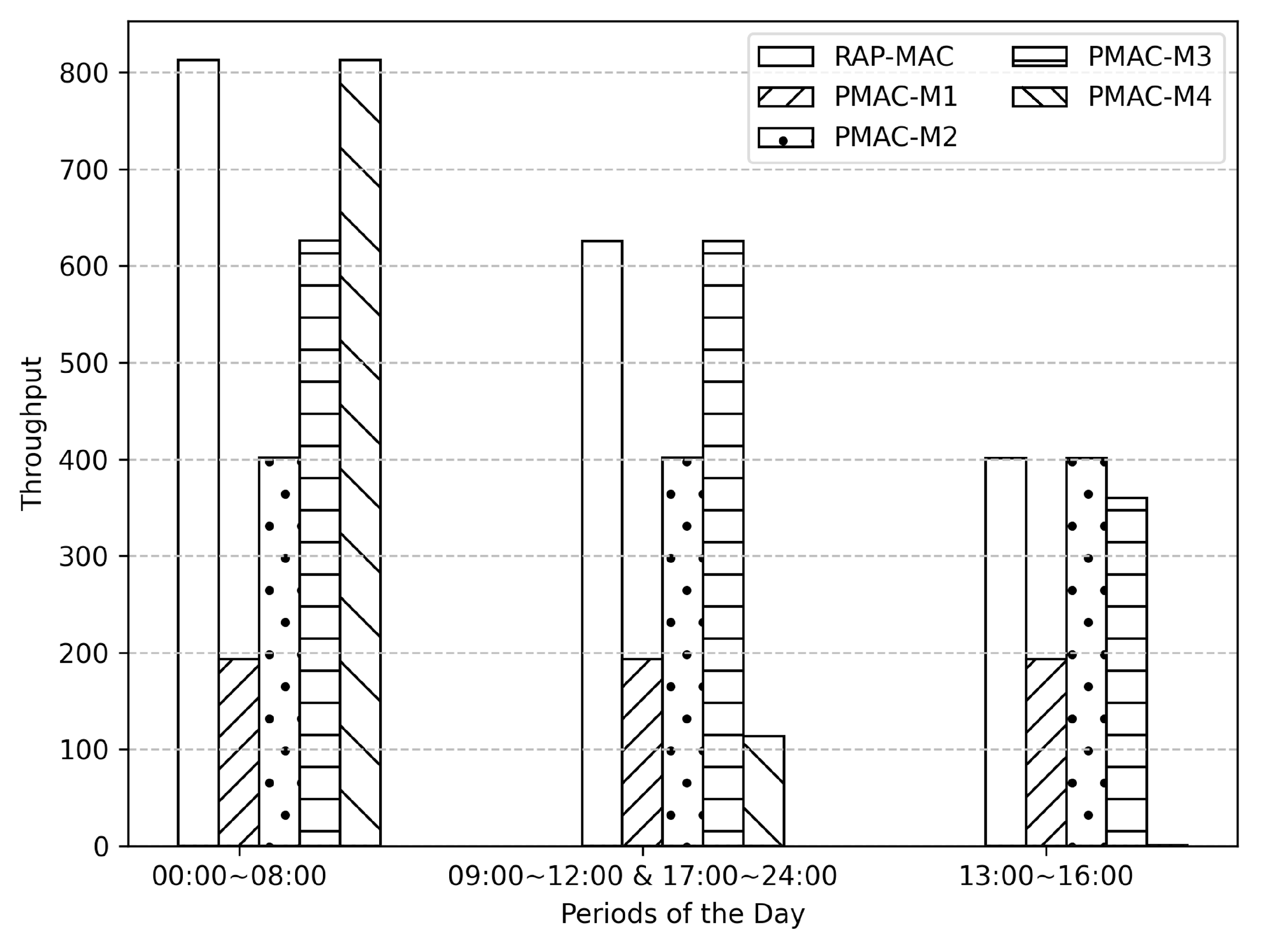
- The simulation platform based on MATLAB is more flexible and allows for convenient parameter adjustments. The communication parameters at the physical layer are set based on the five rate modes provided in Section 4. The channel parameters are configured based on statistical data from sea trials. The main purpose of this simulation platform is to confirm the adaptability of the UA-SN using the RAP-MAC protocol in different underwater environments.
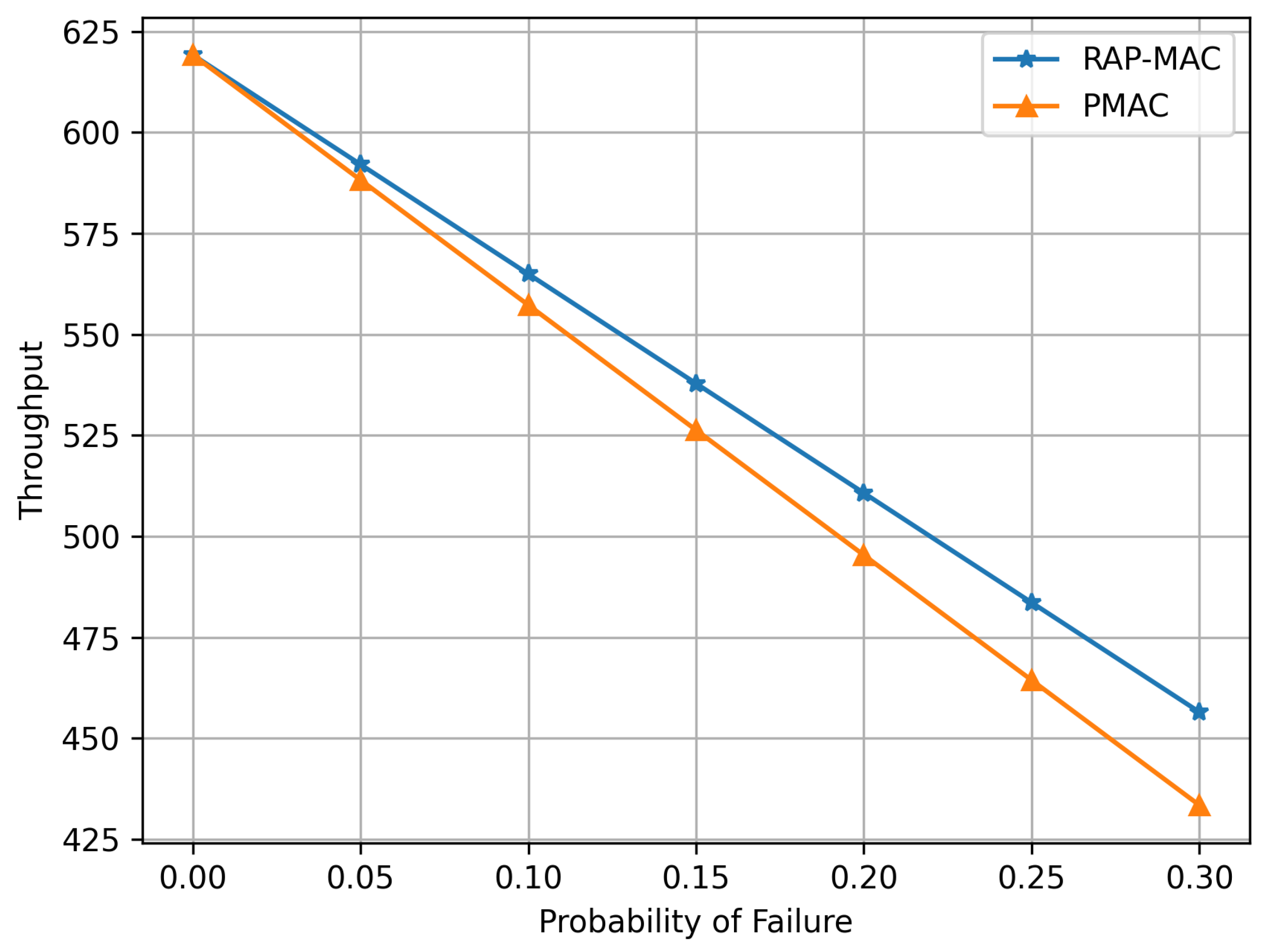
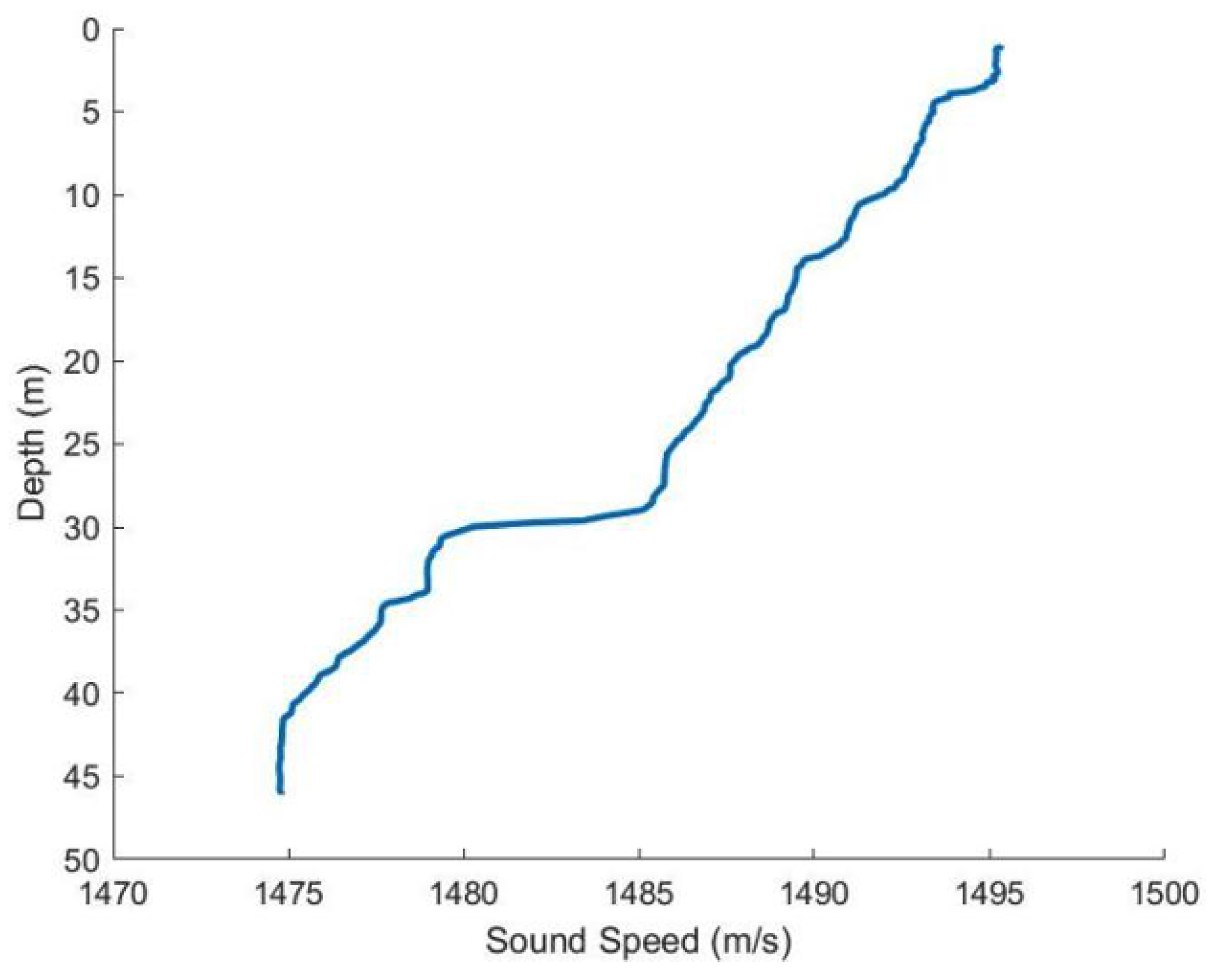
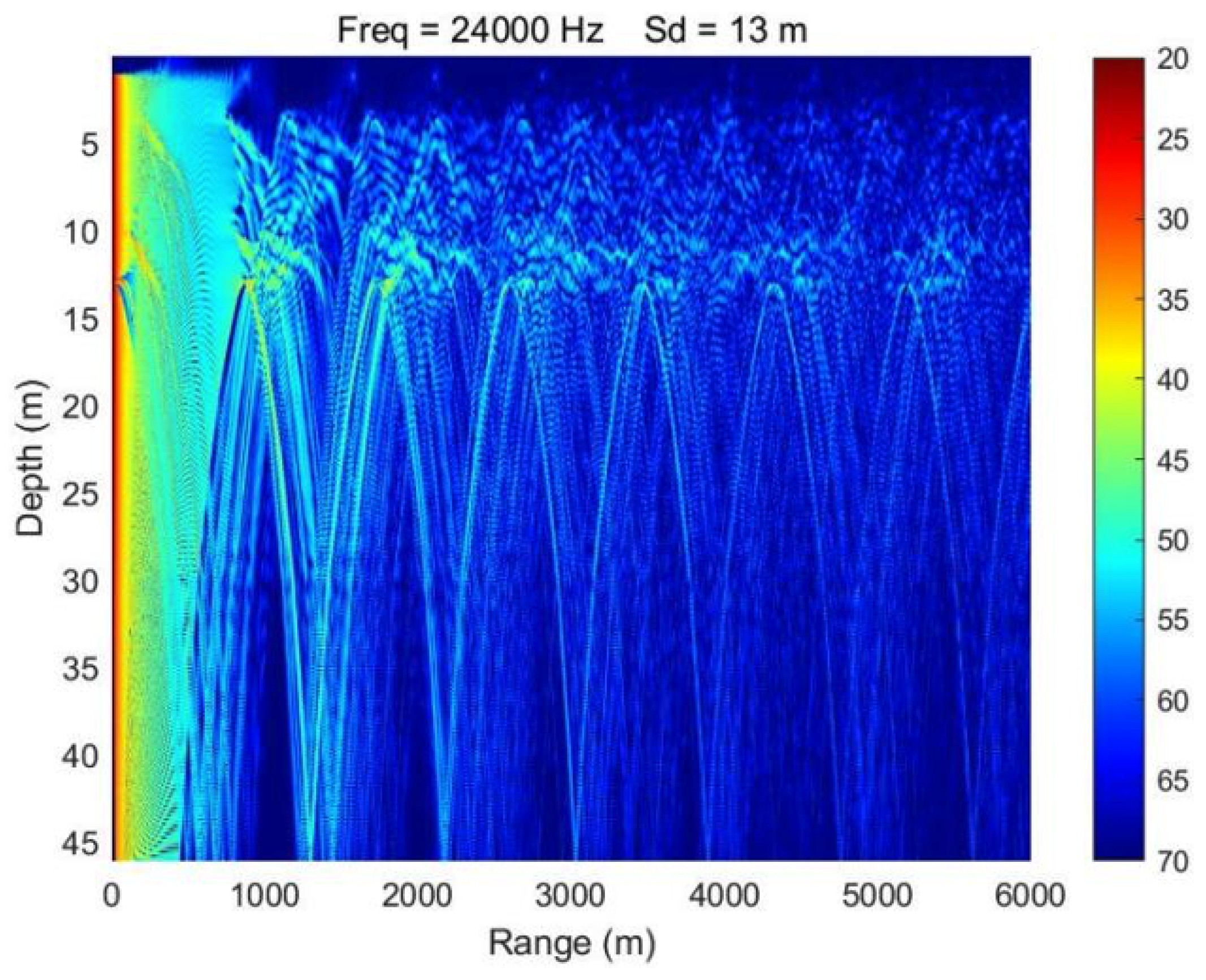
- The Aqua-Net Mate simulation platform based on the Bellhop model is specifically designed for underwater acoustic networks. We embed the Bellhop-based underwater acoustic channel model into this platform, using actual channel parameters and hydrological environments from field trials as inputs to make the simulation closer to real-world conditions. This simulation platform is primarily used to verify the fault recovery capability of the UA-SN using the RAP-MAC protocol.
5.3. Ocean Experiments
5.4. Discussions
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Chaudhary, M.; Goyal, N.; Benslimane, A.; Awasthi, L.K.; Alwadain, A.; Singh, A. Underwater wireless sensor networks: Enabling technologies for node deployment and data collection challenges. IEEE Internet Things J. 2022, 10, 3500–3524. [Google Scholar] [CrossRef]
- Li, J.; Wu, J.; Li, C.; Yang, W.; Bashir, A.K.; Li, J.; Al-Otaibi, Y.D. Information-centric wireless sensor networking scheme with water-depth-awareness content caching for underwater IoT. IEEE Internet Things J. 2021, 9, 858–867. [Google Scholar] [CrossRef]
- Haque, K.F.; Kabir, K.H.; Abdelgawad, A. Advancement of routing protocols and applications of underwater wireless sensor network (UWSN)—A survey. J. Sens. Actuator Netw. 2020, 9, 19. [Google Scholar] [CrossRef]
- Fattah, S.; Gani, A.; Ahmedy, I.; Idris, M.Y.I.; Targio Hashem, I.A. A survey on underwater wireless sensor networks: Requirements, taxonomy, recent advances, and open research challenges. Sensors 2020, 20, 5393. [Google Scholar] [CrossRef] [PubMed]
- Murad, M.; Sheikh, A.A.; Manzoor, M.A.; Felemban, E.; Qaisar, S. A survey on current underwater acoustic sensor network applications. Int. J. Comput. Theory Eng. 2015, 7, 51. [Google Scholar] [CrossRef]
- Kumar, P.; Kumar, P.; Priyadarshini, P.; Srija. Underwater acoustic sensor network for early warning generation. In Proceedings of the 2012 Oceans, Hampton Roads, VA, USA, 14–19 October 2012; pp. 1–6. [Google Scholar]
- Kerfoot, W.C.; Hobmeier, M.M.; Swain, G.; Regis, R.; Raman, V.K.; Brooks, C.N.; Grimm, A.; Cook, C.; Shuchman, R.; Reif, M. Coastal Remote Sensing: Merging Physical, Chemical, and Biological Data as Tailings Drift onto Buffalo Reef, Lake Superior. Remote Sens. 2021, 13, 2434. [Google Scholar] [CrossRef]
- Felemban, E.; Shaikh, F.K.; Qureshi, U.M.; Sheikh, A.A.; Qaisar, S.B. Underwater sensor network applications: A comprehensive survey. Int. J. Distrib. Sens. Netw. 2015, 11, 896832. [Google Scholar] [CrossRef]
- Ali, S.; Ashraf, A.; Qaisar, S.B.; Afridi, M.K.; Saeed, H.; Rashid, S.; Felemban, E.A.; Sheikh, A.A. SimpliMote: A wireless sensor network monitoring platform for oil and gas pipelines. IEEE Syst. J. 2016, 12, 778–789. [Google Scholar] [CrossRef]
- Du, X.; Liu, X.; Su, Y. Underwater acoustic networks testbed for ecological monitoring of Qinghai Lake. In Proceedings of the OCEANS 2016-Shanghai, Shanghai, China, 10–13 April 2016; pp. 1–4. [Google Scholar]
- Jiang, S. State-of-the-art medium access control (MAC) protocols for underwater acoustic networks: A survey based on a MAC reference model. IEEE Commun. Surv. Tutorials 2017, 20, 96–131. [Google Scholar] [CrossRef]
- Chen, W.; Guan, Q.; Yu, H.; Ji, F.; Chen, F. Medium access control under space-time coupling in underwater acoustic networks. IEEE Internet Things J. 2021, 8, 12398–12409. [Google Scholar] [CrossRef]
- Qiao, G.; Yang, J.; Ma, X.; Zhang, Y.; Dong, H. Simulation and experimental verification of MAC protocols for underwater acoustic communication networks. In Proceedings of the 8th International Conference on Underwater Networks & Systems, Kaohsiung, Taiwan, 11–13 November 2013; pp. 1–5. [Google Scholar]
- Cui, J.H.; Kong, J.; Gerla, M.; Zhou, S. The challenges of building mobile underwater wireless networks for aquatic applications. IEEE Netw. 2006, 20, 12–18. [Google Scholar]
- Cui, J.H.; Kong, J.; Gerla, M.; Zhou, S. Challenges: Building scalable and distributed Underwater Wireless Sensor Networks (UWSNs) for aquatic applications. Channels 2005, 45, 22–35. [Google Scholar]
- Le, S.N.; Zhu, Y.; Peng, Z.; Cui, J.H.; Jiang, Z. PMAC: A real-world case study of underwater MAC. In Proceedings of the 8th International Conference on Underwater Networks & Systems, Kaohsiung, Taiwan, 11–13 November 2013; pp. 1–8. [Google Scholar]
- Al Guqhaiman, A.; Akanbi, O.; Aljaedi, A.; Chow, C.E. A survey on MAC protocol approaches for underwater wireless sensor networks. IEEE Sens. J. 2020, 21, 3916–3932. [Google Scholar] [CrossRef]
- Chen, K.; Ma, M.; Cheng, E.; Yuan, F.; Su, W. A survey on MAC protocols for underwater wireless sensor networks. IEEE Commun. Surv. Tutorials 2014, 16, 1433–1447. [Google Scholar] [CrossRef]
- Luque-Nieto, M.Á.; Moreno-Roldán, J.M.; Otero, P.; Poncela, J. Optimal scheduling and fair service policy for STDMA in underwater networks with acoustic communications. Sensors 2018, 18, 612. [Google Scholar] [CrossRef] [PubMed]
- Lmai, S.; Chitre, M.; Laot, C.; Houcke, S. Throughput-efficient super-TDMA MAC transmission schedules in ad hoc linear underwater acoustic networks. IEEE J. Ocean. Eng. 2016, 42, 156–174. [Google Scholar] [CrossRef]
- Yang, J.; Qiao, G.; Hu, Q.; Zhang, J.; Du, G. A dual channel medium access control (MAC) protocol for underwater acoustic sensor networks based on directional antenna. Symmetry 2020, 12, 878. [Google Scholar] [CrossRef]
- Bai, W.; Motani, M.; Wang, H. On the throughput of linear unicast underwater networks. In Proceedings of the GLOBECOM 2017—2017 IEEE Global Communications Conference, Singapore, 4–8 December 2017; pp. 1–6. [Google Scholar]
- Peng, Z.; Zhou, Z.; Cui, J.H.; Shi, Z.J. Aqua-Net: An underwater sensor network architecture: Design, implementation, and initial testing. In Proceedings of the OCEANS 2009, Biloxi, MS, USA, 26–29 October 2009; pp. 1–8. [Google Scholar]
- Mo, H.; Pu, L.; Zhu, Y.; Peng, Z.; Jiang, Z.; Cui, J.H. Evaluating selective ARQ and slotted handshake based access in real world underwater networks. In Proceedings of the Wireless Algorithms, Systems, and Applications: 8th International Conference, WASA 2013, Zhangjiajie, China, 7–10 August 2013; Proceedings 8. Springer: Berlin/Heidelberg, Germany, 2013; pp. 206–220. [Google Scholar]
- Pu, L.; Luo, Y.; Mo, H.; Le, S.; Peng, Z.; Cui, J.H.; Jiang, Z. Comparing underwater MAC protocols in real sea experiments. Comput. Commun. 2015, 56, 47–59. [Google Scholar] [CrossRef]
- Rice, J.; Creber, B.; Fletcher, C.; Baxley, P.; Rogers, K.; McDonald, K.; Rees, D.; Wolf, M.; Merriam, S.; Mehio, R.; et al. Evolution of seaweb underwater acoustic networking. In Proceedings of the OCEANS 2000 MTS/IEEE Conference and Exhibition. Conference Proceedings (Cat. No. 00CH37158), Providence, RI, USA, 11–14 September 2000; Volume 3, pp. 2007–2017. [Google Scholar]
- Rice, J.; Green, D. Underwater acoustic communications and networks for the us navy’s seaweb program. In Proceedings of the 2008 Second International Conference on Sensor Technologies and Applications (Sensorcomm 2008), Cap Esterel, France, 25–31 August 2008; pp. 715–722. [Google Scholar]
- Grund, M.; Freitag, L.; Preisig, J.; Ball, K. The PLUSNet underwater communications system: Acoustic telemetry for undersea surveillance. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–21 September 2006; pp. 1–5. [Google Scholar]
- Ma, L.; Qiao, G.; Liu, S. Heu OFDM-modem for underwater acoustic communication and networking. In Proceedings of the 9th International Conference on Underwater Networks & Systems, Rome, Italy, 12–14 November 2014; pp. 1–5. [Google Scholar]
- Nguyen, N.T.; Heldal, R.; Lima, K.; Oyetoyan, T.D.; Pelliccione, P.; Kristensen, L.M.; Hoydal, K.W.; Reiersgaard, P.A.; Kvinnsland, Y. Engineering Challenges of Stationary Wireless Smart Ocean Observation Systems. IEEE Internet Things J. 2023, 10, 14712–14724. [Google Scholar] [CrossRef]
- Zhu, Y.; Le, S.; Pu, L.; Lu, X.; Peng, Z.; Cui, J.H.; Zuba, M. Aqua-Net Mate: A real-time virtual channel/modem simulator for Aqua-Net. In Proceedings of the 2013 MTS/IEEE OCEANS-Bergen, Bergen, Norway, 10–14 June 2013; pp. 1–6. [Google Scholar]
- Le, S.N.; Peng, Z.; Cui, J.H.; Zhou, H.; Liao, J. Sealinx: A multi-instance protocol stack architecture for underwater networking. In Proceedings of the 8th International Conference on Underwater Networks & Systems, Kaohsiung, Taiwan, 11–13 November 2013; pp. 1–5. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Rate Mode | 1 | 2 | 3 | 4 | 5 | |
|---|---|---|---|---|---|---|
| 1 | 2 | 2 | 4 | 4 | ||
| 1/2 | 1/2 | 3/4 | 1/2 | 3/4 | ||
| (kbps) | 50 ms | 1.522 | 3.045 | 4.568 | 6.090 | 9.136 |
| 100 ms | 1.241 | 2.482 | 3.724 | 4.965 | 7.447 | |
| 150 ms | 1.047 | 2.095 | 3.143 | 4.191 | 6.287 | |
| Time Period | RAP-MAC | PMAC-m1 | PMAC-m2 | PMAC-m3 | PMAC-m4 |
|---|---|---|---|---|---|
| 0:00–8:00 | 99.2% | 99.9% | 99.9% | 99.9% | 99.2% |
| 9:00–12:00 & 17:00–24:00 | 99.9% | 99.9% | 99.9% | 99.9% | 15.2% |
| 13:00–16:00 | 99.9% | 99.9% | 99.9% | 98.2% | 1.3% |
| A | B | C | ||
|---|---|---|---|---|
| GPS | Longitude | 121°38.402E | 121°40.500E | 121°41.823E |
| Latitude | 38°51.424N | 38°51.444N | 38°51.387N | |
| Distance | – | 3.03 km | 4.94 km | |
| Fault Node ID | Time of Fault Occurrence | Fault Location | Network Recovery |
|---|---|---|---|
| 17 | 14:37:35 | 14:47:35 | 15:01:47 |
| Parameters | The Number of Nodes | One-Hop Distance | End-to-End Distance | Mode | Throughput | |
|---|---|---|---|---|---|---|
| Location | North China Sea | 21 | 2 km | 40 km | 1 | 191.6 bps |
| South China Sea | 21 | 4.35 km | 87 km | 3 | 601.6 bps | |
| Communication Distance (km) | Average SNR | BLER | Mode | Rate (bps) |
|---|---|---|---|---|
| 5 | 5.0 | 0.07 | 1 | 1047 |
| 3 | 8.5 | 0.05 | 2 | 2095 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Pan, X.; Liu, M.; Zhu, J.; Huo, L.; Peng, Z.; Liu, J.; Cui, J.-H. RAP-MAC: A Robust and Adaptive Pipeline MAC Protocol for Underwater Acoustic String Networks. Remote Sens. 2024, 16, 2195. https://doi.org/10.3390/rs16122195
Pan X, Liu M, Zhu J, Huo L, Peng Z, Liu J, Cui J-H. RAP-MAC: A Robust and Adaptive Pipeline MAC Protocol for Underwater Acoustic String Networks. Remote Sensing. 2024; 16(12):2195. https://doi.org/10.3390/rs16122195
Chicago/Turabian StylePan, Xiaohe, Mengzhuo Liu, Jifeng Zhu, Lipeng Huo, Zheng Peng, Jun Liu, and Jun-Hong Cui. 2024. "RAP-MAC: A Robust and Adaptive Pipeline MAC Protocol for Underwater Acoustic String Networks" Remote Sensing 16, no. 12: 2195. https://doi.org/10.3390/rs16122195
APA StylePan, X., Liu, M., Zhu, J., Huo, L., Peng, Z., Liu, J., & Cui, J.-H. (2024). RAP-MAC: A Robust and Adaptive Pipeline MAC Protocol for Underwater Acoustic String Networks. Remote Sensing, 16(12), 2195. https://doi.org/10.3390/rs16122195