


A Seagrass Mapping Toolbox for South Pacific Environments

 ,
,
Abstract
1. Introduction
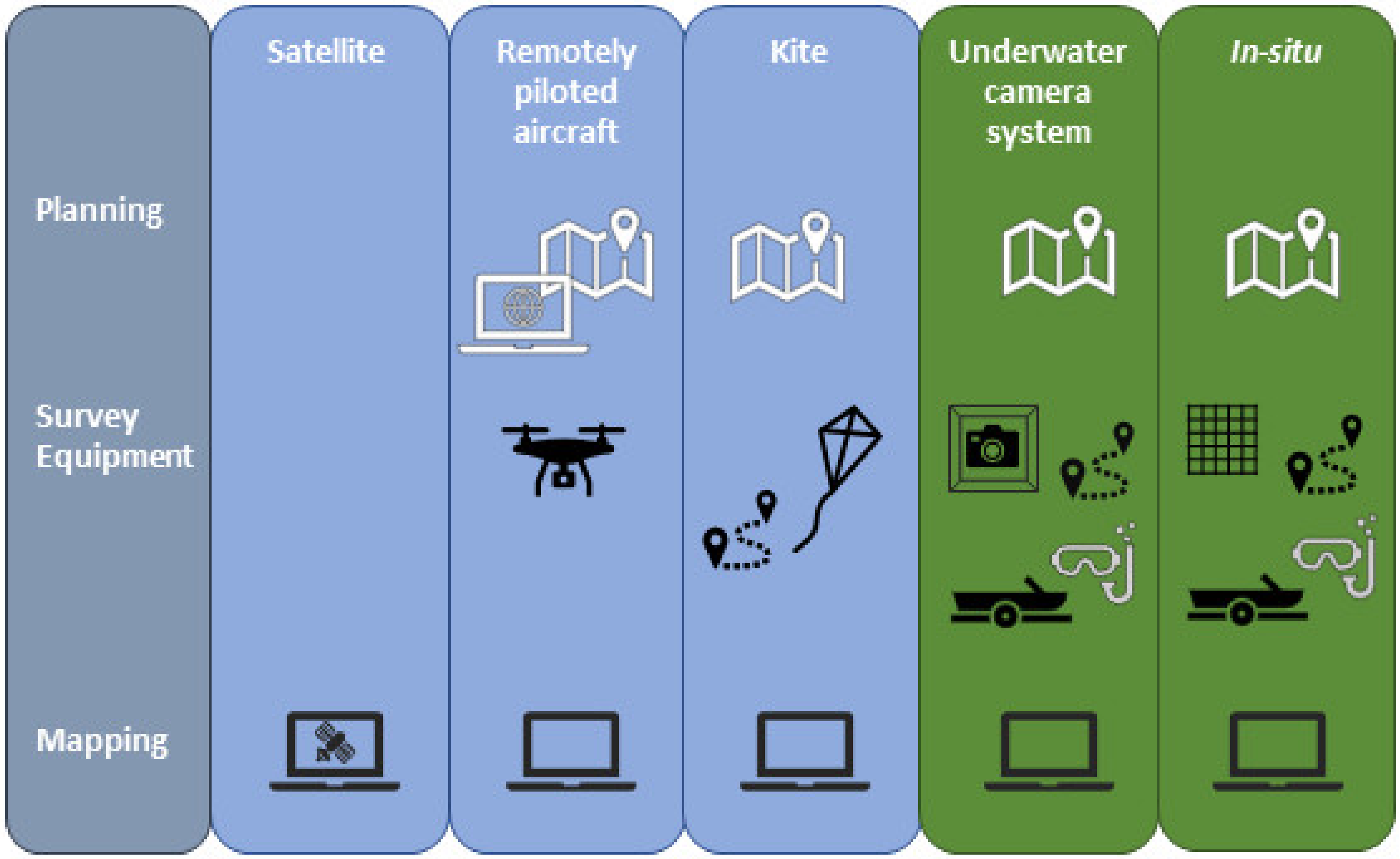
2. Seagrass Monitoring Tools
2.1. Remote Sensing Techniques
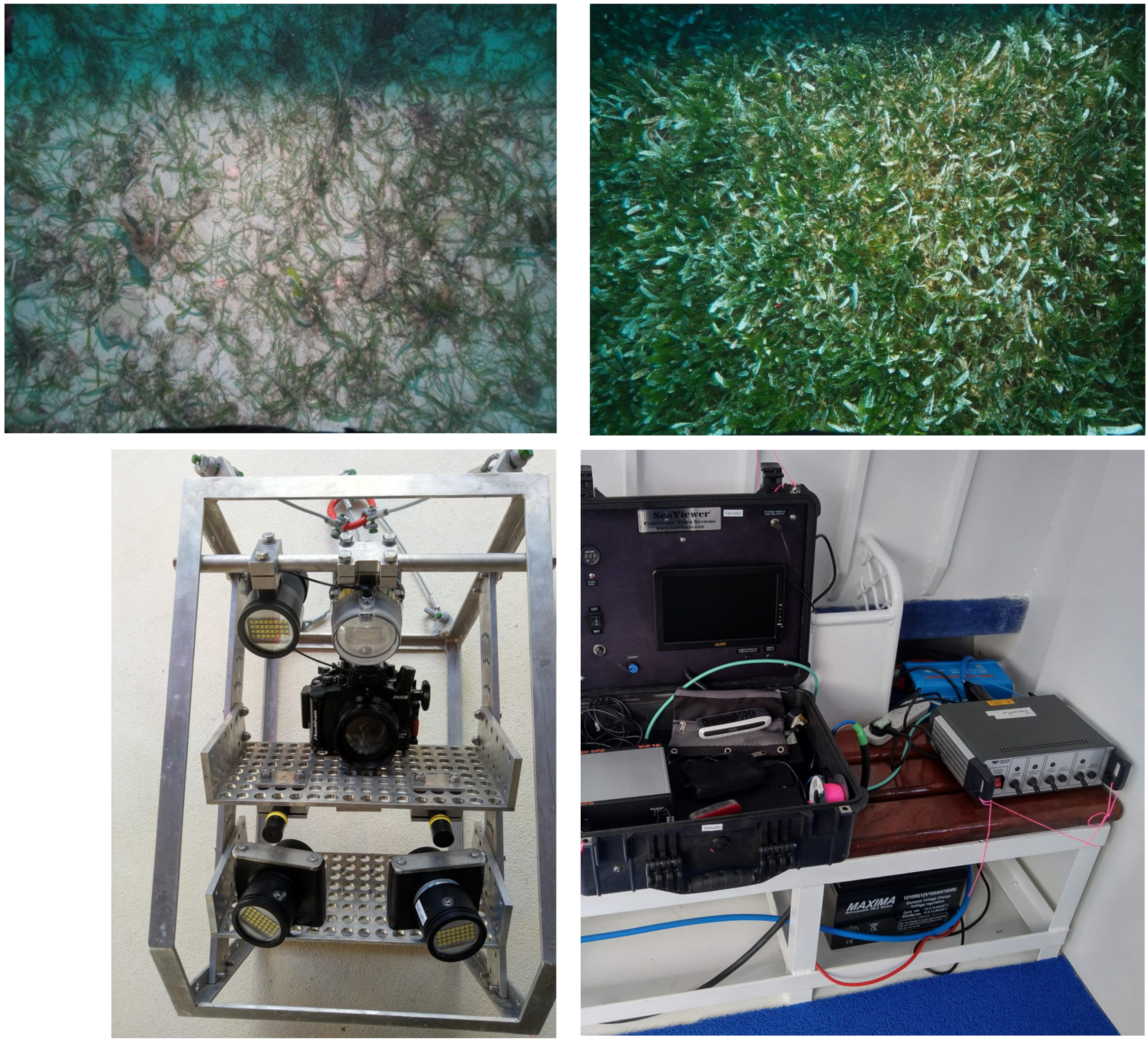
2.2. In Situ Techniques
3. The South Pacific Seagrass Mapping Toolbox
3.1. Selecting Tools
- Spatial scale and resolution. Tools that map larger scales can fill data gaps quickly and effectively. Mapping over large spatial scales often means mapping at low-resolution, which can come at the cost of accuracy, thus mapping at smaller scale is important in the context of monitoring change at specific locations.
- Cost. Large Ocean States can be economically disadvantaged compared to more prosperous nations, with comparatively smaller budgets to spend on ecological monitoring, and so decisions should consider the economic cost of purchase and ongoing maintenance of equipment and of technical training).
- Maintenance and storage. Some of the monitoring techniques use tools that require little in the way of maintenance, but others are complex pieces of equipment requiring calibration, a power source, ongoing maintenance and troubleshooting. If survey teams lack the necessary skills, support, storage space or means to purchase replacement components, this equipment can become a burden.
- Expertise. The level of expertise needed to operate monitoring equipment and undertake mapping processes is relevant to tool selection; the greater the complexity of the method, the greater the skills need and training burden.
- Accessibility. Intertidal and shallow coastal environments can be unsafe places to access for surveying and water safety is of particular concern in nations where swimming skills are not widespread (Udagedara, S., Blue Resources Trust Sri Lanka; pers. comm.). Moreover, the South Pacific is made up of thousands of small and isolated islands.
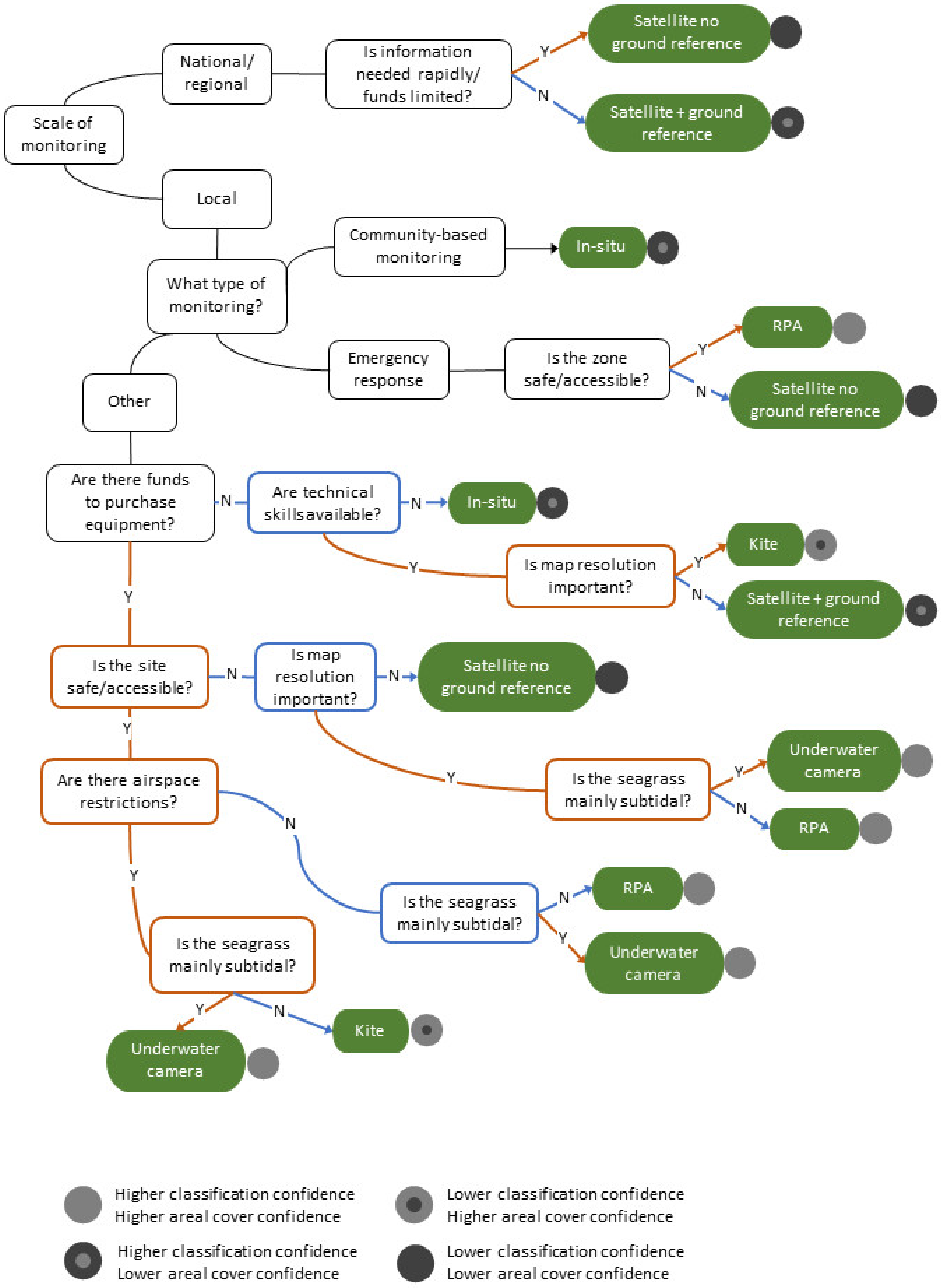
3.2. The Toolbox Decision Tree
- the size and accessibility of the area to be mapped;
- the purpose of the mapping;
- the speed with which the information is needed;
- the finances available for monitoring;
- the skills and experience of the monitoring team;
- the accuracy and level of detail required.
3.2.1. National and Regional Monitoring
3.2.2. Local-Scale Monitoring
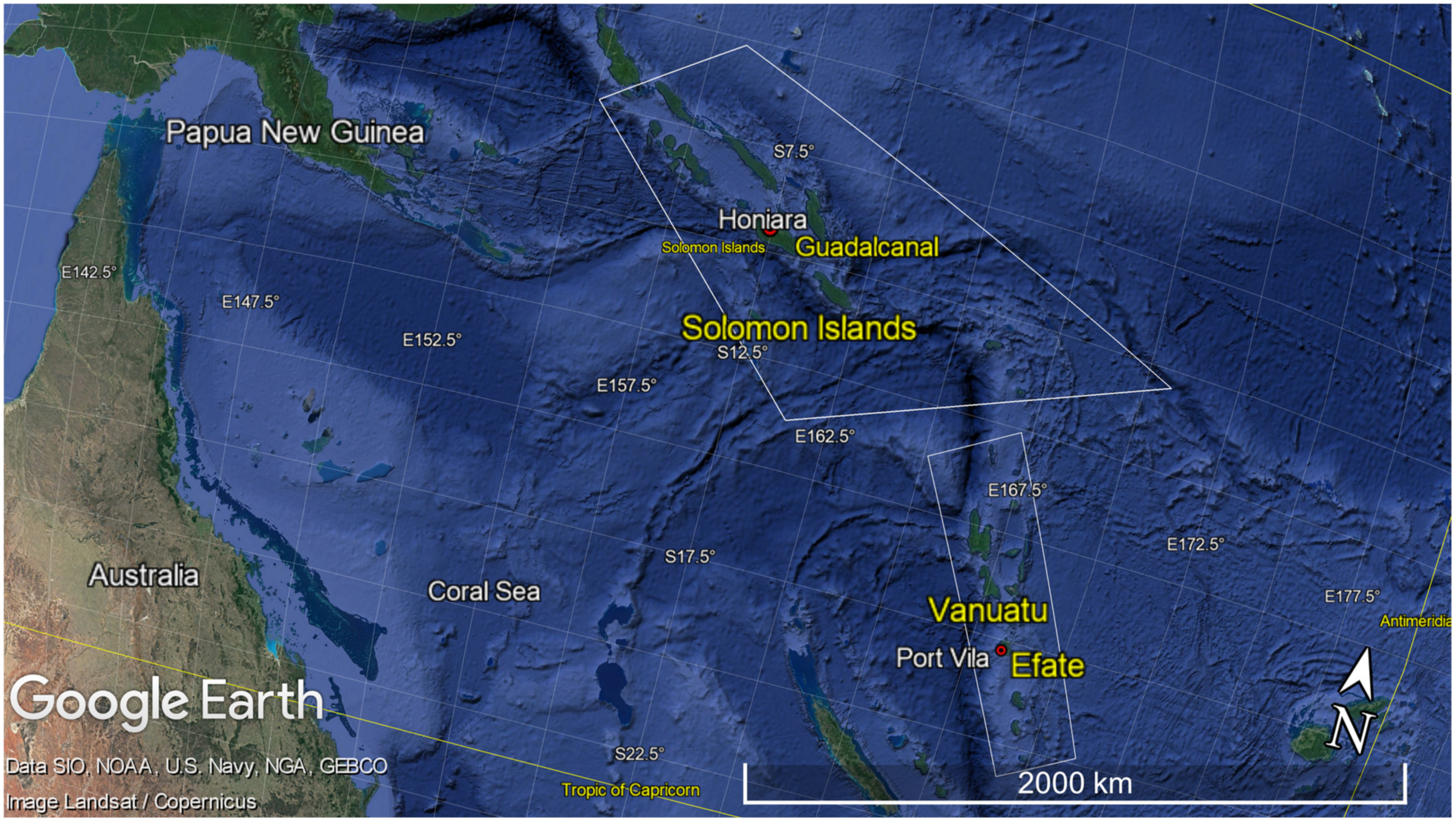
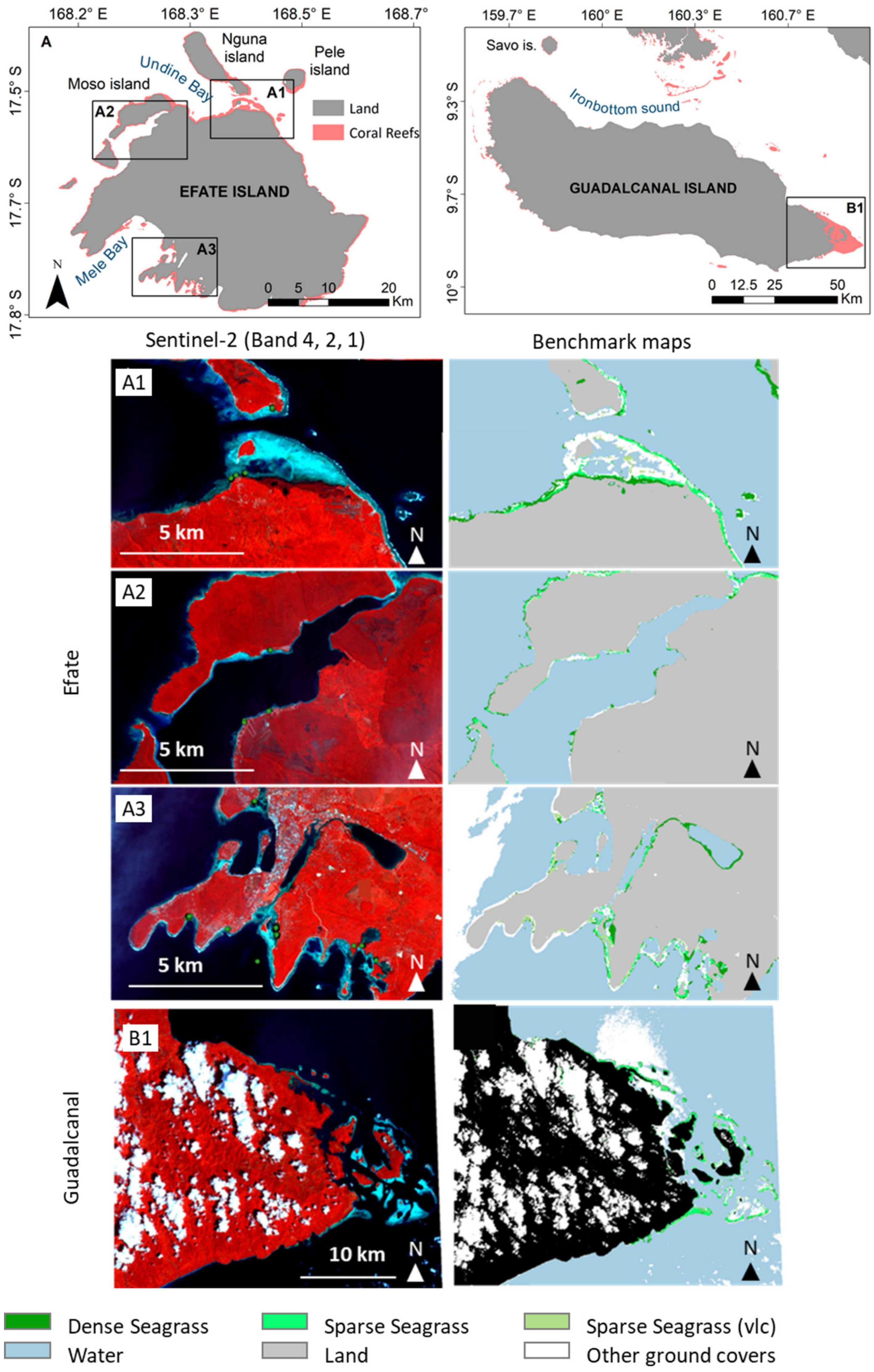
3.3. Example Application of the Tools
4. Discussion
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
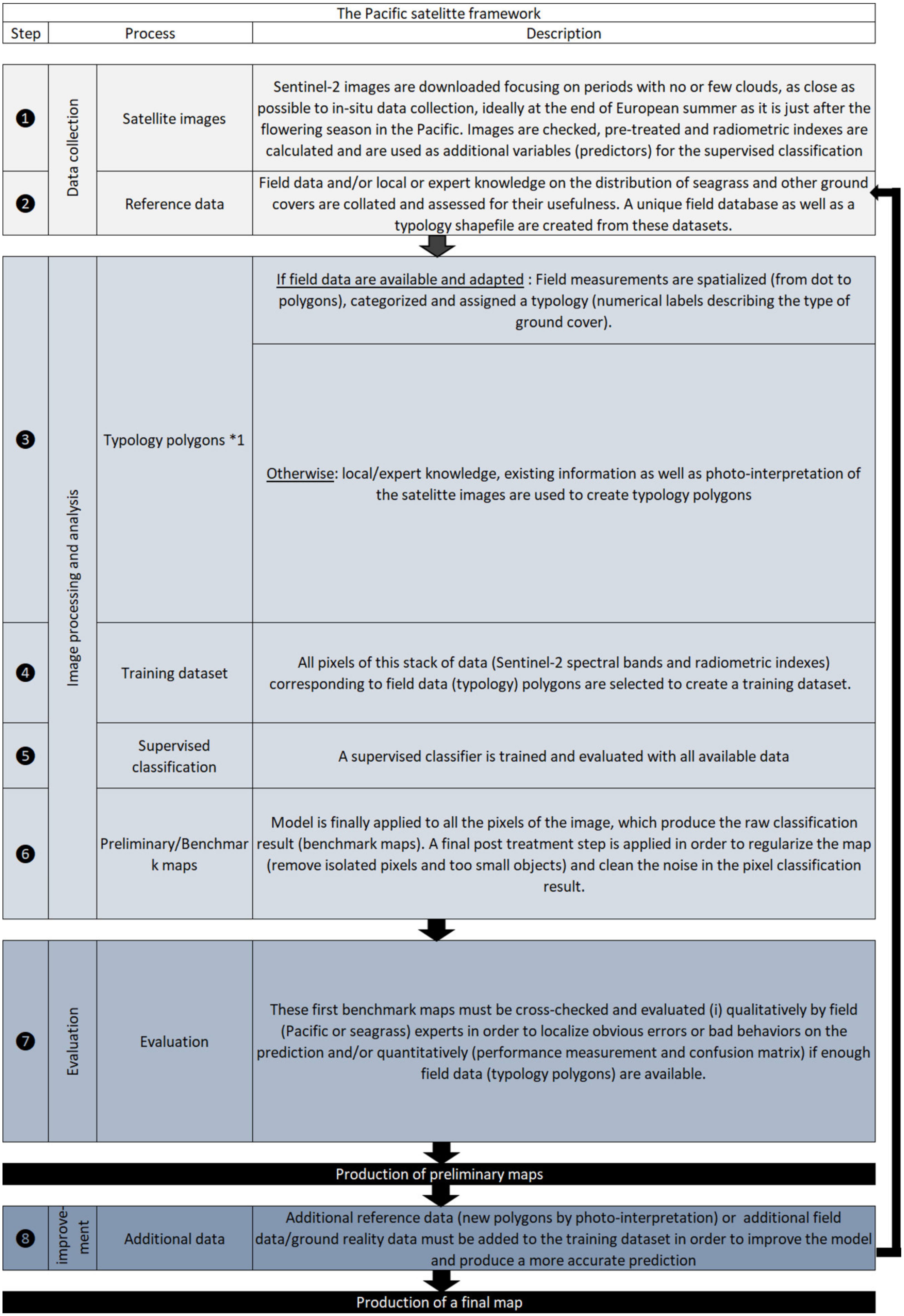
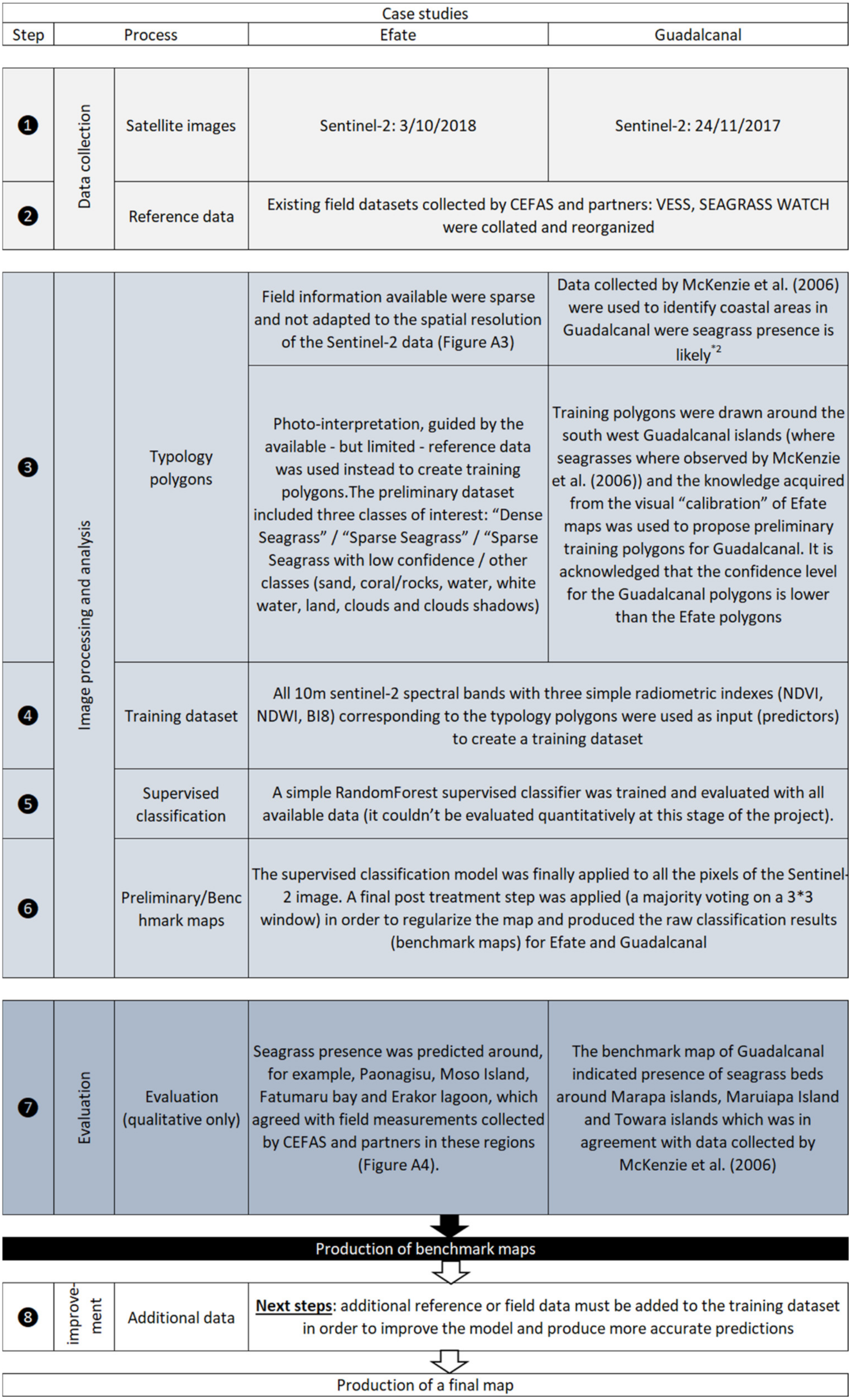
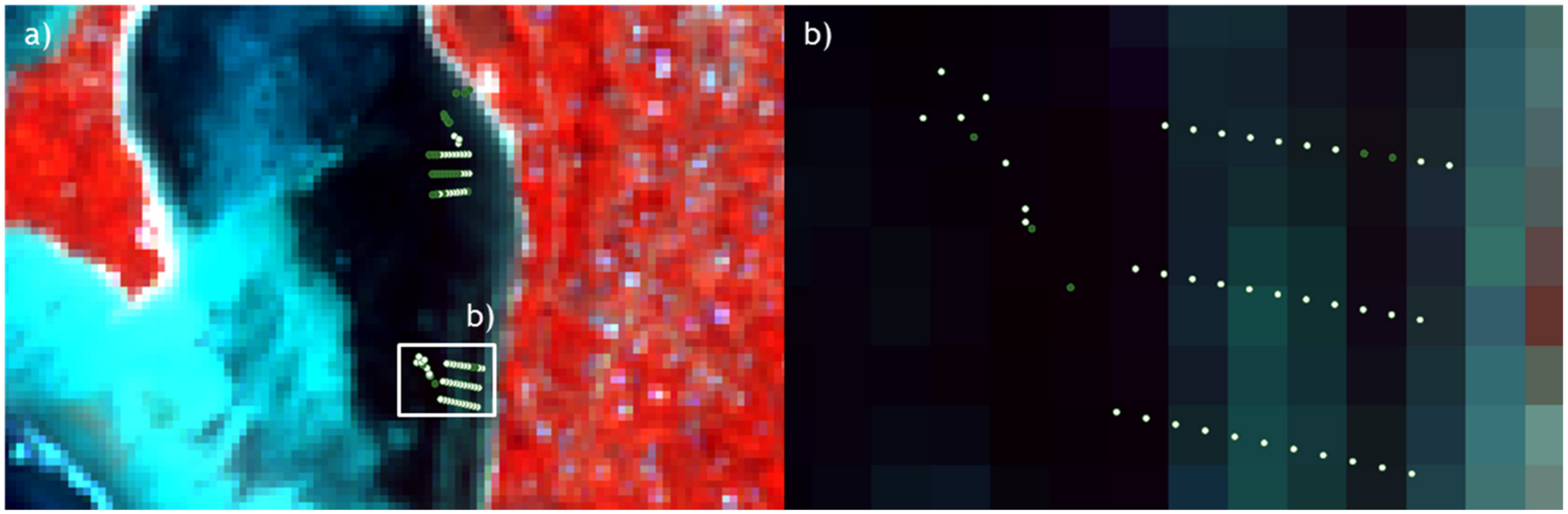
Appendix A. Satellite Mapping of Vanuatu and Solomon Islands




References
- Fourqurean, J.W.; Duarte, C.M.; Kennedy, H.; Marbà, N.; Holmer, M.; Mateo, M.A.; Apostolaki, E.T.; Kendrick, G.A.; Krause-Jensen, D.; McGlathery, K.J.; et al. Seagrass Ecosystems as a Globally Significant Carbon Stock. Nat. Geosci. 2012, 5, 505–509. [Google Scholar] [CrossRef]
- Cullen-Unsworth, L.; Unsworth, R. Seagrass Meadows, Ecosystem Services, and Sustainability. Environ. Sci. Policy Sustain. Dev. 2013, 55, 14–28. [Google Scholar] [CrossRef]
- Nordlund, L.M.; Koch, E.W.; Barbier, E.B.; Creed, J.C. Seagrass Ecosystem Services and Their Variability across Genera and Geographical Regions. PLoS ONE 2016, 11, e0163091. [Google Scholar] [CrossRef] [PubMed]
- Costanza, R.; Limburg, K.; de Groot, R.; Farber, S.; Grasso, M.; Hannon, B.; Limburg, K.; Haeem, S.; O’Neill, R.V.; Paruelo, J.; et al. The Value of the World’s Ecosystem Services and Natural Capital. Nature 1997, 387, 253–260. [Google Scholar] [CrossRef]
- Brodie, G.; Brodie, J.; Maata, M.; Peter, M.; Otiawa, T.; Devlin, M.J. Seagrass Habitat in Tarawa Lagoon, Kiribati: Service Benefits and Links to National Priority Issues. Mar. Pollut. Bull. 2020, 155, 111099. [Google Scholar] [CrossRef] [PubMed]
- Marsh, H.; O’Shea, T.J.; Reynolds, J.E.R. Ecology and Conservation of the Sirenia: Dugongs and Manatees; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- McKenzie, L.J.; Yoshida, R.L.; Aini, J.W.; Andréfouet, S.; Colin, P.L.; Cullen-Unsworth, L.C.; Hughes, A.T.; Payri, C.E.; Rota, M.; Shaw, C.; et al. Seagrass Ecosystem Contributions to People’s Quality of Life in the Pacific Island Countries and Territories. Mar. Pollut. Bull. 2021, 167, 112307. [Google Scholar] [CrossRef] [PubMed]
- Trundle, A. Resilient Cities in a Sea of Islands: Informality and Climate Change in the South Pacific. Cities 2020, 97, 102496. [Google Scholar] [CrossRef]
- Dennison, W.C.; Orth, R.J.; Moore, K.A.; Stevenson, J.C.; Carter, V.; Kollar, S.; Bergstrom, P.W.; Batiuk, R.A. Assessing Water Quality with Submersed Aquatic Vegetation. BioScience 1993, 43, 86–94. [Google Scholar] [CrossRef]
- Waycott, M.; Duarte, C.M.; Carruthers, T.J.B.; Orth, R.J.; Dennison, W.C.; Olyarnik, S.; Calladine, A.; Fourqurean, J.W.; Heck, K.L., Jr.; Hughes, A.R.; et al. Accelerating Loss of Seagrasses across the Globe Threatens Coastal Ecosystems. Proc. Natl. Acad. Sci. USA 2009, 106, 12377–12381. [Google Scholar] [CrossRef] [PubMed]
- Brodie, G.; de Ramon N’Yeurt, A. Effects of Climate Change on Seagrasses and Seagrass Habitats Relevant to the Pacific Islands. Prof. Tech. Rep. 2018, 112–131. [Google Scholar]
- Duarte, C.M. The Future of Seagrass Meadows. Environ. Conserv. 2002, 29, 192–206. [Google Scholar] [CrossRef]
- Unsworth, R.K.F.; Cullen, L.C. Recognising the Necessity for Indo-Pacific Seagrass Conservation. Conserv. Lett. 2010, 3, 63–73. [Google Scholar] [CrossRef]
- Howes, E.L.; Birchenough, S.; Lincoln, S. Effects of Climate Change Relevant to the Pacific Islands. In Pacific Marine Climate Change Report Card Science Review; Cefas: UK, 2018; pp. 1–19. [Google Scholar]
- UNESCO. Phoenix Islands Protected Area. Available online: https://whc.unesco.org/en/list/1325/ (accessed on 4 February 2022).
- UNESCO. Lagoons of New Caledonia: Reef Diversity and Associated Ecosystems. Available online: https://whc.unesco.org/en/list/1115/ (accessed on 4 February 2022).
- UNESCO. Henderson Island. Available online: https://whc.unesco.org/en/list/487/ (accessed on 4 February 2022).
- UNESCO. East Rennell. Available online: https://whc.unesco.org/en/list/854/ (accessed on 4 February 2022).
- McKenzie, L.J.; Yoshida, R.L. Over a Decade Monitoring Fiji’s Seagrass Condition Demonstrates Resilience to Anthropogenic Pressures and Extreme Climate Events. Mar. Pollut. Bull. 2020, 160, 111636. [Google Scholar] [CrossRef]
- McKenzie, L.J.; Yoshida, R.L.; Aini, J.W.; Andréfouet, S.; Colin, P.L.; Cullen-Unsworth, L.C.; Hughes, A.T.; Payri, C.E.; Rota, M.; Shaw, C.; et al. Seagrass Ecosystems of the Pacific Island Countries and Territories: A Global Bright Spot. Mar. Pollut. Bull. 2021, 167, 112308. [Google Scholar] [CrossRef]
- Hossain, M.S.; Bujang, J.S.; Zakaria, M.H.; Hashim, M. The Application of Remote Sensing to Seagrass Ecosystems: An Overview and Future Research Prospects. Int. J. Remote Sens. 2015, 36, 61–114. [Google Scholar] [CrossRef]
- Veettil, B.K.; Ward, R.D.; Lima, M.D.A.C.; Stankovic, M.; Hoai, P.N.; Quang, N.X. Opportunities for Seagrass Research Derived from Remote Sensing: A Review of Current Methods. Ecol. Indic. 2020, 117, 106560. [Google Scholar] [CrossRef]
- Hossain, M.S.; Hashim, M. Potential of Earth Observation (EO) Technologies for Seagrass Ecosystem Service Assessments. Int. J. Appl. Earth Obs. Geoinf. 2019, 77, 15–29. [Google Scholar] [CrossRef]
- Andréfouet, S.; Derville, S.; Buttin, J.; Dirberg, G.; Wabnitz, C.C.C.; Garrigue, C.; Payri, C.E. Nation-Wide Hierarchical and Spatially-Explicit Framework to Characterize Seagrass Meadows in New-Caledonia, and Its Potential Application to the Indo-Pacific. Mar. Pollut. Bull. 2021, 173, 113036. [Google Scholar] [CrossRef]
- McKenzie, L.J.; Langlois, L.A.; Roelfsema, C.M. Improving Approaches to Mapping Seagrass within the Great Barrier Reef: From Field to Spaceborne Earth Observation. Remote Sens. 2022, 14, 2604. [Google Scholar] [CrossRef]
- McKenzie, L.; Campbell, S.; Lasi, F. Solomon Islands Marine Assessment: Technical Report of Survey Conducted May 13 to June 17, 2004; The Nature Conservancy Indo-Pacific Resource Centre: Queensland, Australia, 2006. [Google Scholar]
- Pan, Z.; Glennie, C.; Fernandez-Diaz, J.C.; Starek, M. Comparison of Bathymetry and Seagrass Mapping with Hyperspectral Imagery and Airborne Bathymetric Lidar in a Shallow Estuarine Environment. Int. J. Remote Sens. 2016, 37, 516–536. [Google Scholar] [CrossRef]
- Bryson, M.; Johnson-Roberson, M.; Murphy, R.J.; Bongiorno, D. Kite Aerial Photography for Low-Cost, Ultra-High Spatial Resolution Multi-Spectral Mapping of Intertidal Landscapes. PLoS ONE 2013, 8, e73550. [Google Scholar] [CrossRef]
- Wang, D.; Xing, S.; He, Y.; Yu, J.; Xu, Q.; Li, P. Evaluation of a New Lightweight UAV-Borne Topo-Bathymetric LiDAR for Shallow Water Bathymetry and Object Detection. Sensors 2022, 22, 1379. [Google Scholar] [CrossRef]
- Hannam, M.; Moskal, L.M. Terrestrial Laser Scanning Reveals Seagrass Microhabitat Structure on a Tideflat. Remote Sens. 2015, 7, 3037–3055. [Google Scholar] [CrossRef]
- Valle, M.; Borja, Á.; Chust, G.; Galparsoro, I.; Garmendia, J.M. Modelling Suitable Estuarine Habitats for Zostera Noltii, Using Ecological Niche Factor Analysis and Bathymetric LiDAR. Estuar. Coast. Shelf Sci. 2011, 94, 144–154. [Google Scholar] [CrossRef]
- Rende, S.F.; Irving, A.D.; Bacci, T.; Parlagreco, L.; Bruno, F.; De Filippo, F.; Montefalcone, M.; Penna, M.; Trabucco, B.; Di Mento, R.; et al. Advances in Micro-Cartography: A Two-Dimensional Photo Mosaicing Technique for Seagrass Monitoring. Estuar. Coast. Shelf Sci. 2015, 167, 475–486. [Google Scholar] [CrossRef]
- Hamad, I.Y.; Staehr, P.A.U.; Rasmussen, M.B.; Sheikh, M. Drone-Based Characterization of Seagrass Habitats in the Tropical Waters of Zanzibar. Remote Sens. 2022, 14, 680. [Google Scholar] [CrossRef]
- Mogstad, A.A.; Johnsen, G.; Ludvigsen, M. Shallow-Water Habitat Mapping Using Underwater Hyperspectral Imaging from an Unmanned Surface Vehicle: A Pilot Study. Remote Sens. 2019, 11, 685. [Google Scholar] [CrossRef]
- Ventura, D.; Mancini, G.; Casoli, E.; Pace, D.S.; Lasinio, G.J.; Belluscio, A.; Ardizzone, G. Seagrass Restoration Monitoring and Shallow-Water Benthic Habitat Mapping through a Photogrammetry-Based Protocol. J. Environ. Manag. 2022, 304, 114262. [Google Scholar] [CrossRef]
- Barrell, J.; Grant, J.; Hanson, A.; Mahoney, M. Evaluating the Complementarity of Acoustic and Satellite Remote Sensing for Seagrass Landscape Mapping. Int. J. Remote Sens. 2015, 36, 4069–4094. [Google Scholar] [CrossRef]
- McKenzie, L.J.; Campbell, S.J.; Roder, C.A. Seagrass-Watch: Manual for Mapping and Monitoring:Seagrass Resources by Community (Citizen) Volunteers; Queensland Government-Department of Primary Industries-Marine Plant Ecology Group: Cairns, Australia, 2003; ISBN 978-0-9579741-1-1. [Google Scholar]
- Water Framework Directive-United Kingdom Technical Advisory Group (WFD-UKTAG). Water Framework Directive Development of Classification Tools for Ecological Assessment: Angiosperm. In Intertidal Seagrass Tool; Scottish Environment Protection Agency (SEPA): Stirling, UK, 2014; p. 25. [Google Scholar]
- Lincoln, S.; Vannoni, M.; Benson, L.; Engelhard, G.H.; Tracey, D.; Shaw, C.; Molisa, V. Assessing Intertidal Seagrass Beds Relative to Water Quality in Vanuatu, South Pacific. Mar. Pollut. Bull. 2021, 163, 111936. [Google Scholar] [CrossRef]
- Jones, B.L.; Unsworth, R.K.F. The Perilous State of Seagrass in the British Isles. R. Soc. Open Sci. 2016, 3, 150596. [Google Scholar] [CrossRef] [PubMed]
- Winters, G.; Edelist, D.; Shem-Tov, R.; Beer, S.; Rilov, G. A Low Cost Field-Survey Method for Mapping Seagrasses and Their Potential Threats: An Example from the Northern Gulf of Aqaba, Red Sea. Aquat. Conserv. Mar. Freshw. Ecosyst. 2017, 27, 324–339. [Google Scholar] [CrossRef]
- McKenzie, L.J.; Finkbeiner, M.A.; Kirkman, H. Methods for Mapping Seagrass Distribution. In Global Seagrass Research Methods; Elsevier: Amsterdam, The Netherlands, 2001; pp. 101–121. ISBN 978-0-444-50891-1. [Google Scholar]
- Johnson, J.E.; Hooper, E.; Welch, D.J. Community Marine Monitoring Toolkit: A Tool Developed in the Pacific to Inform Community-Based Marine Resource Management. Mar. Pollut. Bull. 2020, 159, 111498. [Google Scholar] [CrossRef] [PubMed]
- McKenzie, L.; Long, W.; Coles, R.; Roder, C. Seagrass-Watch: Community Based Monitoring of Seagrass Resources. Biol. Mar. Mediterr. 2000, 7, 393–396. [Google Scholar]
- Foody, G.M. Status of Land Cover Classification Accuracy Assessment. Remote Sens. Environ. 2002, 80, 185–201. [Google Scholar] [CrossRef]
- Roberts, C.; Mcclean, C.; Veron, J.; Hawkins, J.; Allen, G.; McAllister, D.; Mittermeier, C.; Schueler, F.; Spalding, M.; Wells, F.; et al. Marine Biodiversity Hotspots and Conservation Priorities for Tropical Reefs. Science 2002, 295, 1280–1284. [Google Scholar] [CrossRef] [PubMed]
- Guannel, G.; Arkema, K.; Ruggiero, P.; Verutes, G. The Power of Three: Coral Reefs, Seagrasses and Mangroves Protect Coastal Regions and Increase Their Resilience. PLoS ONE 2016, 11, e0158094. [Google Scholar] [CrossRef] [PubMed]
- Albert, S.; Kvennefors, C.; Jacob, K.; Kera, J.; Grinham, A. Environmental Change in a Modified Catchment Downstream of a Gold Mine, Solomon Islands. Environ. Pollut. 2017, 231, 942–953. [Google Scholar] [CrossRef] [PubMed]
- Boboria, D.; Maata, M.; Mani, F.S. Metal Pollution in Sediments and Bivalves in Marovo Lagoon, Solomon Islands. Mar. Pollut. Bull. 2021, 164, 112026. [Google Scholar] [CrossRef] [PubMed]
- Smith, A.J.; Barber, J.; Davis, S.; Jones, C.; Kotra, K.K.; Losada, S.; Lyons, B.P.; Mataki, M.; Potter, K.D.; Devlin, M.J. Aquatic Contaminants in Solomon Islands and Vanuatu: Evidence from Passive Samplers and Microtox Toxicity Assessment. Mar. Pollut. Bull. 2021, 165, 112118. [Google Scholar] [CrossRef]
- Devlin, M.; Smith, A.; Graves, C.A.; Petus, C.; Tracey, D.; Maniel, M.; Hooper, E.; Kotra, K.; Samie, E.; Loubser, D.; et al. Baseline Assessment of Coastal Water Quality, in Vanuatu, South Pacific: Insights Gained from in-Situ Sampling. Mar. Pollut. Bull. 2020, 160, 111651. [Google Scholar] [CrossRef]
- Sentinel-2 Operations. Available online: https://www.esa.int/Enabling_Support/Operations/Sentinel-2_operations (accessed on 4 February 2022).
- Colefax, A.P.; Butcher, P.A.; Kelaher, B.P. The Potential for Unmanned Aerial Vehicles (UAVs) to Conduct Marine Fauna Surveys in Place of Manned Aircraft. ICES J. Mar. Sci. 2018, 75, 1–8. [Google Scholar] [CrossRef]
- Wang, D.; Shao, Q.; Yue, H. Surveying Wild Animals from Satellites, Manned Aircraft and Unmanned Aerial Systems (UASs): A Review. Remote Sens. 2019, 11, 1308. [Google Scholar] [CrossRef]
- Yang, B.; Hawthorne, T.L.; Hessing-Lewis, M.; Duffy, E.J.; Reshitnyk, L.Y.; Feinman, M.; Searson, H. Developing an Introductory UAV/Drone Mapping Training Program for Seagrass Monitoring and Research. Drones 2020, 4, 70. [Google Scholar] [CrossRef]
- Hobley, B.; Arosio, R.; French, G.; Bremner, J.; Dolphin, T.; Mackiewicz, M. Semi-Supervised Segmentation for Coastal Monitoring Seagrass Using RPA Imagery. Remote Sens. 2021, 13, 1741. [Google Scholar] [CrossRef]
- Torres-Pulliza, D.; Wilson, J.; Darmawan, A.; Campbell, S.; Andréfouët, S. Ecoregional Scale Seagrass Mapping: A Tool to Support Resilient MPA Network Design in the Coral Triangle. Ocean. Coast. Manag. 2013, 80, 55–64. [Google Scholar] [CrossRef]
- Anon. Republic of Kiribati Intended Nationally Determined Contribution; Government of Kiribati: Kiribati, 2015. [Google Scholar]
- Archer-Rand, S.; Whomersley, P.; O’Connor, J.; Dosell, A. Rapid Assessment of Seabed Habitats Around Pitcairn Island in Aid of Activity Management During the COVID-19 Global Pandemic. Front. Mar. Sci. 2021, 8, 640505. [Google Scholar] [CrossRef]
- van der Ploeg, J.; Ratu, F.; Viravira, J.; Brien, M.; Wood, C.; Zama, M.; Gomese, C.; Hurutarau, J. Human-Crocodile Conflict in Solomon Islands; Programme Report 2019-02; WorldFish: Penang, Malaysia, 2019. [Google Scholar]
- Moseby, K.E.; Daniels, A.; Duri, V.; Tropa, W.; Welma, S.; Bero, A.; Soapi, K. Community-Based Monitoring Detects Catastrophic Earthquake and Tsunami Impacts on Seagrass Beds in the Solomon Islands. Mar. Pollut. Bull. 2020, 150, 110444. [Google Scholar] [CrossRef]
- Mellors, J.E.; McKenzie, L.J.; Coles, R.G. Seagrass-Watch: Engaging Torres Strait Islanders in Marine Habitat Monitoring. Cont. Shelf Res. 2008, 28, 2339–2349. [Google Scholar] [CrossRef]
- Tsujimoto, R.; Terauchi, G.; Sasaki, H.; Sakamoto, S.X.; Sawayama, S.; Sasa, S.; Yagi, H.; Komatsu, T. Damage to Seagrass and Seaweed Beds in Matsushima Bay, Japan, Caused by the Huge Tsunami of the Great East Japan Earthquake on 11 March 2011. Int. J. Remote Sens. 2016, 37, 5843–5863. [Google Scholar] [CrossRef]
- Gritti, C.; Beguet, B.; Robert, J.; Sirvent, L. Cartographie d’habitats Par Télédétection En Méditerranée: L’exemple Du Site Natura 2000 “Complexe Lagunaire de Salses-Leucate”. In Proceedings of the Conference Journée Intelligence Artificielle et Biodiversité, Montpellier, France, 30 March 2021. [Google Scholar]
- Casella, E.; Collin, A.; Harris, D.; Ferse, S.; Bejarano, S.; Parravicini, V.; Hench, J.L.; Rovere, A. Mapping Coral Reefs Using Consumer-Grade Drones and Structure from Motion Photogrammetry Techniques. Coral Reefs 2017, 36, 269–275. [Google Scholar] [CrossRef]
- Seagrass-Watch. Global Seagrass Observing Network. Available online: https://www.seagrasswatch.org/ (accessed on 4 February 2022).
- Rende, S.F.; Bosman, A.; Di Mento, R.; Bruno, F.; Lagudi, A.; Irving, A.D.; Dattola, L.; Giambattista, L.D.; Lanera, P.; Proietti, R.; et al. Ultra-High-Resolution Mapping of Posidonia Oceanica (L.) Delile Meadows through Acoustic, Optical Data and Object-Based Image Classification. JMSE 2020, 8, 647. [Google Scholar] [CrossRef]
- Carter, A.B.; McKenna, S.A.; Rasheed, M.A.; Collier, C.; McKenzie, L.; Pitcher, R.; Coles, R. Synthesizing 35 Years of Seagrass Spatial Data from the Great Barrier Reef World Heritage Area, Queensland, Australia. Limnol. Oceanogr. Lett. 2021, 6, 216–226. [Google Scholar] [CrossRef]
- Postlethwaite, V.R.; McGowan, A.E.; Kohfeld, K.E.; Robinson, C.L.K.; Pellatt, M.G. Low Blue Carbon Storage in Eelgrass (Zostera Marina) Meadows on the Pacific Coast of Canada. PLoS ONE 2018, 13, e0198348. [Google Scholar] [CrossRef]
- Magalhães, K.M.; de Barros, K.V.S.; de Lima, M.C.S.; de Rocha-Barreira, C.A.; Filho, J.S.R.; de Soares, M.O. Oil Spill + COVID-19: A Disastrous Year for Brazilian Seagrass Conservation. Sci. Total Environ. 2021, 764, 142872. [Google Scholar] [CrossRef] [PubMed]
- Alves, R.M.S.; Van Colen, C.; Rabaut, M.; De Wulf, A.; Vincx, M.; Stal, C. Cost-Effective Coastal Habitat Mapping: Detecting Intertidal Polychaete Aggregations with Low-Altitude Photogrammetry. Photogramm. Eng. Remote Sens. 2019, 85, 899–905. [Google Scholar] [CrossRef]
- Currier, K. Mapping with Strings Attached: Kite Aerial Photography of Durai Island, Anambas Islands, Indonesia. J. Maps 2015, 11, 589–597. [Google Scholar] [CrossRef]
- Carter, M.; Goodsir, F.; Cundall, P.; Devlin, M.; Fuller, S.; Jeffery, B.; Hil, G.; Talouli, A. Ticking Ecological Time Bombs: Risk Characterisation and Management of Oil Polluting World War II Shipwrecks in the Pacific Ocean. Mar. Pollut. Bull. 2021, 164, 112087. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Tool | Advantages | Disadvantages | |
|---|---|---|---|
| (a) Remote sensing | Objective, accurate, safe | Moderate to steep learning curve, need for ground-reference data | |
| Aerial remote sensing | Map entire features, mapping can be automated | Limited by atmospheric and water conditions and ground-reference data, challenging in deeper or turbid water due to light attenuation and water clarity | |
| Optical satellite | Map entire regions over multiple scales/resolutions, allows repeat coverage, some data are free, no access constraints | Less accurate for small beds, limited by cloud, less control over image timing, higher-resolution data can be expensive | |
| Crewed aircraft (Optical or LiDAR) | Map multiple beds at a time, higher-resolution than satellite | Less accurate for finer features, limited by cloud/fog (optical), greater reliance on ground-reference as no photographs (LiDAR), expensive | |
| Remotely piloted aircraft | Can be low-priced, highly resolved maps, speedy | Multiple flights needed for large beds; limited by wind and fog, needs near-site access, travel costs | |
| Kite aerial photography | Can be low-priced, highly resolved maps | Multiple flights needed for large beds; very limited by wind and fog, navigational control affects map quality, needs site access, travel costs | |
| Underwater remote sensing | Avoids interference from atmospheric conditions | Can require water ingress (e.g., scuba diver) or at-sea boat surveys | |
| Optical camera systems | Direct mapping or ground-reference for other tools, intertidal and subtidal cover, range of simple to complex systems | Can be more complicated and expensive than aerial, limited by light attenuation and water clarity, positioning harder, constraints on site coverage, needs site access, travel/boat costs | |
| Acoustic systems (e.g., side-scan sonar, multibeam echosounder) | No issues of light Attenuation, good areal coverage | Greater reliance on ground-reference as no photographs, travel/boat costs | |
| (b) In situ survey | Simple, effective, short learning curve | Can be low data coverage, safety concerns in remote or difficult terrain and costs of travel to remote sites | |
| Boundary- tracking | Outer boundary is delineated | Does not consider patchiness so may overestimate cover | |
| Grid/transect/random quadrat | Identify variability in cover within a bed | Interpolation between samples reduces overall accuracy |
| Tool | Scale | Max. Spatial Resolution | Equipment Cost (Relative) | Maintenance | Expertise | Site Access |
|---|---|---|---|---|---|---|
| In situ | Local | mm | Minimal (quadrats, camera, snorkelling kit) | Negligible | Species identification, otherwise little needed | Each survey |
| Satellite | International to local | m | Some satellite data free | None | Specialist data analysis * | Only for reference data |
| Crewed aircraft | National/ regional | m | High cost for purchase or hire | Onerous if purchased (less if hired) | Specialist planning, piloting and data analysis * | Only for reference data |
| Remotely piloted aircraft | Local | mm | Low to moderate upfront cost (aircraft, sensor(s), GPS) | Low | Basic piloting skills, specialist data analysis * | For reference data; flight base can be inland |
| Kites | Local | mm | Low to moderate upfront cost (kite, sensor(s), GPS) | Low | Some specialist skill for flying, specialist data analysis skills * | Each survey |
| Underwater acoustics | Local | mm | High cost for equipment, vessel hire/purchase | Moderate; requires calibration | Specialist operation and data analysis skills | At sea for each survey (vessel) |
| Underwater camera systems | Local | mm | Equipment cheap to expensive, vessel hire/purchase if used | Low to high (depending on model) | Some specialist operating skills, specialist data analysis skills * | At sea for each survey (vessel/ hand-held) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bremner, J.; Petus, C.; Dolphin, T.; Hawes, J.; Beguet, B.; Devlin, M.J. A Seagrass Mapping Toolbox for South Pacific Environments. Remote Sens. 2023, 15, 834. https://doi.org/10.3390/rs15030834
Bremner J, Petus C, Dolphin T, Hawes J, Beguet B, Devlin MJ. A Seagrass Mapping Toolbox for South Pacific Environments. Remote Sensing. 2023; 15(3):834. https://doi.org/10.3390/rs15030834
Chicago/Turabian StyleBremner, Julie, Caroline Petus, Tony Dolphin, Jon Hawes, Benoît Beguet, and Michelle J. Devlin. 2023. "A Seagrass Mapping Toolbox for South Pacific Environments" Remote Sensing 15, no. 3: 834. https://doi.org/10.3390/rs15030834
APA StyleBremner, J., Petus, C., Dolphin, T., Hawes, J., Beguet, B., & Devlin, M. J. (2023). A Seagrass Mapping Toolbox for South Pacific Environments. Remote Sensing, 15(3), 834. https://doi.org/10.3390/rs15030834