1. Introduction
With the development of computational electromagnetic (CEM), the electromagnetic (EM) scattering characteristics and Doppler characteristics of random rough surface have received a great deal of attention in recent years from a range of applications, such as radar imaging, surface remote sensing, and ocean wave spectra estimation. Thus far, several methods have been proposed to evaluate the EM scattering from a rough surface. For example, the method of moments (MoM) combined with Rao–Wilton–Glisson (RWG) basis functions and Poggio–Miller–Chang–Harrington–Wu (PMCHW) integral equations is proposed and utilized to solve EM scattering from a rough surface in [
1]. The multilevel fast multipole algorithm (MLFMA), together with the impedance boundary conditions (IBC) and the self-dual integral equation, is applied to calculate the backscattering from a rough sea surface under low grazing incidence [
2]. A stochastic solution of the EM scattering from a penetrable, randomly rough surface is derived by using the vector-based-finite-element method (FEM) in [
3]. Li et al. combined the Finite-Difference Time-Domain (FDTD) approach with the uniaxial perfectly matched layer (UPML) absorbing boundary to solve the EM scattering problems of 1-D rough sea surfaces [
4], 2-D rough sea surfaces [
5], and two-layered rough surfaces [
6]. The time domain integral equation (TDIE) is applied to simulate the transient scattering from the ocean surface with ship wake in [
7]. In [
8], a second stochastic degree iterative algorithm with sparse matrix (SM) and Chebyshev approximation is proposed to calculate the fully polarimetric bistatic scattering behavior that resulted from the interaction of an EM wave with all scales of ocean waves. Saddek Afifi uses the first-order small slope approximation (SSA-I) and the first-order small perturbation method (SPM-I) to study the EM scattering from a 2-D random rough surface that separates the vacuum from a perfect electromagnetic conductor (PEMC) [
9]. The second-order small slope approximation (SSA-II) is applied to solve the bis- and mono-static scattering from linear and non-linear rough sea surfaces in [
10,
11,
12]. The second-order small perturbation method (SPM-II) is applied to solve the EM scattering from layered mediums with rough interfaces by Hasan Zamani [
13,
14] and R. J. Burkholder [
15]. A semi-deterministic facet model (SDFM) is proposed in [
16] to simulate the EM scattering from an ocean-like surface. In [
17], the advanced integral equation model (AIEM) is applied to predict the backscattering, bistatic scattering, and emission of rough soil surfaces. Wang and Tong proposed an improved facet-based model derived from a two-scale model (TSM) to evaluate the scattering strength of an electrically large ocean surface [
18]. In [
19,
20,
21,
22,
23], the first-order SSA and TSM models are utilized to solve monostatic and bistatic scattering from randomly rough surfaces (sea surface covered with or without oil film, ground surface) in different frequency bands.
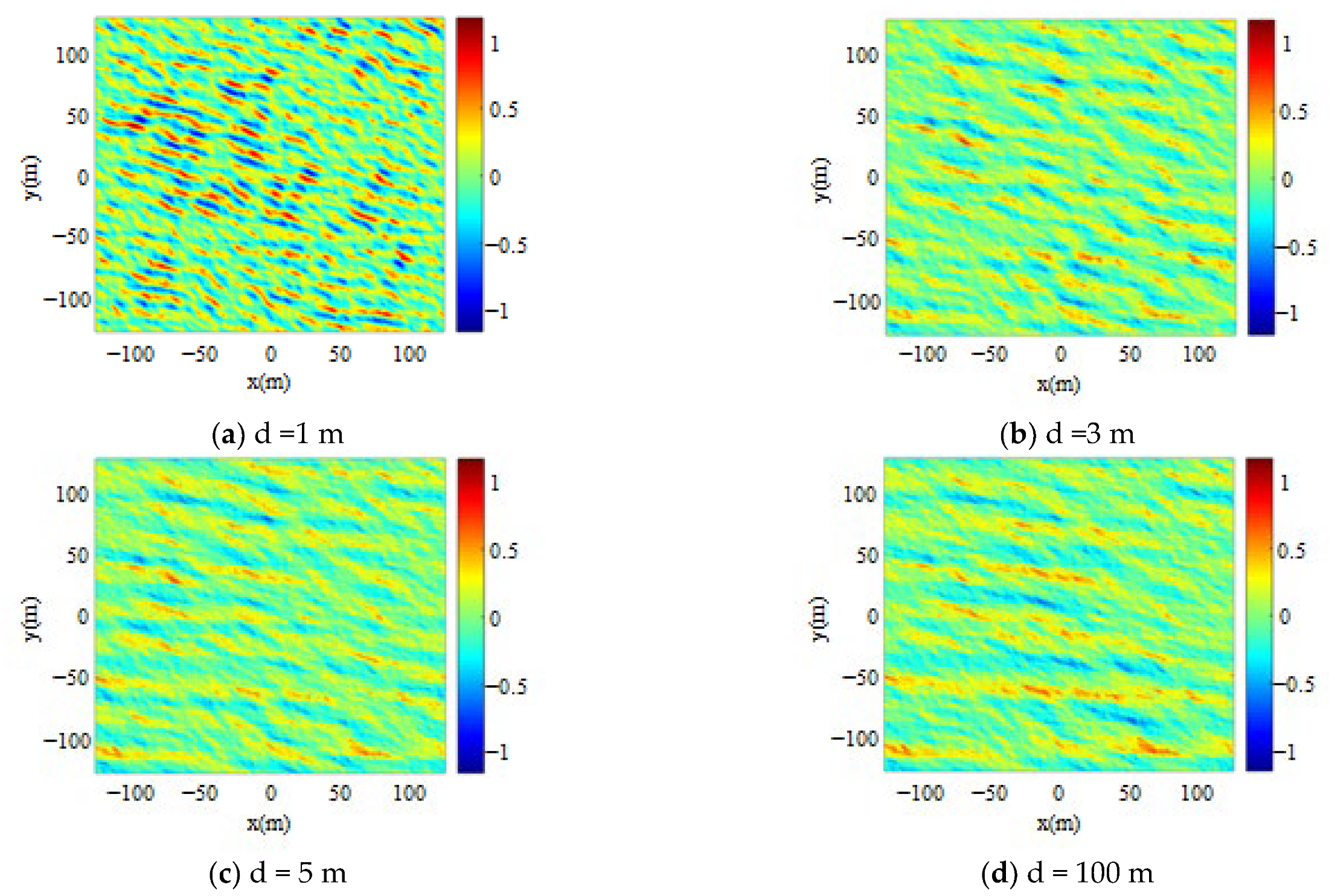
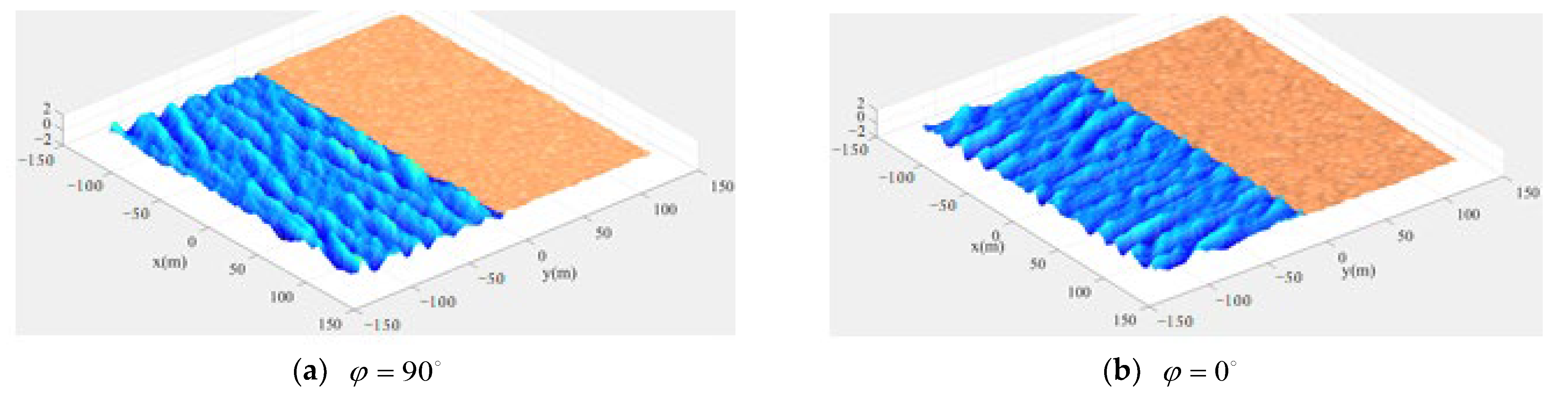
However, in all of the literature mentioned above, the processed rough surface is the sea surface or ground surface, which contains only one type of background surface and one power spectrum. It is possible that both the sea surface and ground surface exist in one beam in the real radar detection. Due to the difference in the dielectric parameters and the surface profile between the land–sea junction composite rough surface and the sea (ground) surface, the EM scattering characteristics of the land–sea junction composite rough surface are correspondingly different from those of the sea surface and those of the ground surface. Motivated by the reasons illustrated above, our focus in this paper is on the influence of land–sea interface factors on radar cross-section (RCS) and Doppler spectra of EM scattered echoes of the land–sea junction composite rough surface, which has a frozen land surface and a time-evolving sea surface. The research in this paper is potentially valuable for remote sensing, target detection in land–sea junction areas, etc. Due to desirable properties such as analytical tractability and numerical efficiency, in this paper the nonlinear hydrodynamic model of the JONSWAP spectrum combined with an experiment-verified shoaling coefficient is used to model a finite-depth sea surface, and the exponential correlation function is adopted to model the ground surface. A weighted arctangent function is introduced to smoothly connect the sea surface and the ground surface, and to model the land–sea junction composite rough surface. Compared with the classical models such as Kirchhoff approximation (KA), TSM, and SPM, SSA-II takes into account facets’ tilt modulation and second-order Bragg scattering and is thus capable of reasonably predicting the RCS and Doppler spectra. Therefore, the SSA-II is employed to evaluate the RCS and Doppler spectra of radar echoes from sea surfaces and land–sea junction composite rough surfaces in this study.
In [
24,
25,
26,
27,
28], several methods have been proposed to solve electromagnetic scattering from a land–sea junction composite rough surface or a target located above a coastal environment. This paper has advantages over the literature cited previously. First, the SSA-II is applied as the electromagnetic scattering kernel since it is more accurate than the techniques in the aforementioned literature and can account for second-order Bragg scattering. Second, this paper focuses on the analysis of Doppler characteristics of the land–sea junction composite rough surface, which is not involved in the prior literature. The weighted arctangent function was originally introduced in [
29] to generate a land–sea junction composite rough surface, but there are several differences between [
29] and this paper. First, although the weighted arctangent function has been introduced both in [
29] and the manuscript under review, the two functions have different forms. Second, the Modified Equivalent Current Approximation (MECA) is used to calculate the EM scattering fields from the composite rough surface in [
29], which can only take into account the specular reflection effect. In this paper, the SSA-II is applied as the electromagnetic scattering kernel, which is more accurate than MECA and can take into account second-order Bragg scattering. Third, the EM scattering from a target located in the land–sea junction area is the primary issue addressed in [
29]. In this paper, the RCS and Doppler spectra of the land–sea junction composite rough surface are calculated and discussed in detail.
The remainder of this paper is organized as follows: in
Section 2, the weighted arctangent function is introduced, and the modeling of the land–sea junction composite rough surface is presented.
Section 3 presents the SSA-II EM scattering model with tapered wave incidence for evaluating the RCS of rough surfaces (sea surface and land–sea junction composite rough surface). A comparison of the numerical results of the RCS and Doppler spectra for finite-depth sea surface and land–sea junction composite rough surfaces is presented and discussed in
Section 4.
Section 5 is devoted to the conclusions of this paper.
3. SSA-II Model for EM Scattering from Land–Sea Junction Composite Rough Surface
The SSA proposed by Voronovich consists of a basic approximation of theory (SSA-I) and a second-order correction to it (SSA-II). The SSA-I only contains first-order Bragg scattering, which results in the fact that the SSA-I cannot predict the depolarization of wave scattering from a rough surface in the plane of incidence. Compared with other classical models (such as KA, TSM, and SPM), the SSA-II has its own advantages: (1) it takes into account the mutual transformation of the two linear polarization states caused by facets’ tilts; (2) it takes into account the second-order Bragg scattering and is thus capable of reasonably predicting the depolarized scattering from rough surfaces both in and outside the plane of incidence; and (3) a continuous spectrum of roughness is required, and it is not necessary to divide roughness into large- and small-scale components (just like it is in TSM). Due to the advantages mentioned above, the SSA-II model is used to evaluate the bistatic RCS, monostatic RCS, and Doppler spectra of the land–sea junction composite rough surface.
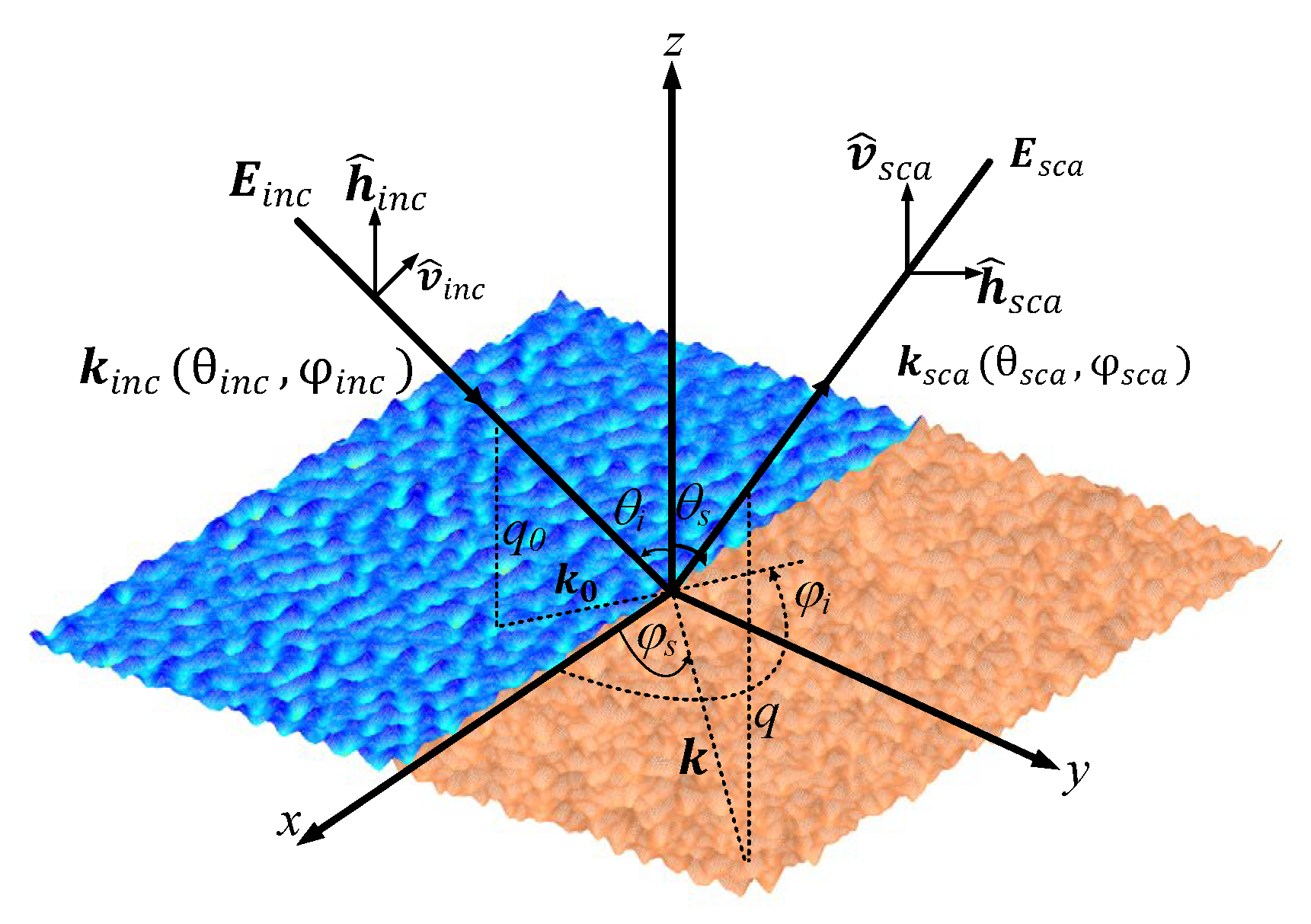
The SSA is based on the transformation properties of scattering amplitude (SA) with respect to vertical shifts. It claims that the slope of roughness is generally the only small parameter underlying this theory. Consider a tapered plane wave illuminated on a land–sea junction composite rough surface to reduce the edge effect caused by the limited surface size of
, which can be expressed as
where
in which
represents the tapered wave factor, which is set as
in the following simulations.
and
denote the incident angle and incident azimuth angle, respectively.
The geometry of the scattering problem and corresponding notation are shown in
Figure 6.
and
denote the scattering angle and scattering azimuth angle of the receiver, respectively.
and
are the incident wave vector and scattering wave vector, respectively;
and
denote the horizontal components of incident wave vector and scattering wave vector; and
and
are the vertical components of incident wave vector and scattering wave vector.
and
represent the polarizations of incident and scattering waves.
Thus, after introducing the tapered plane incident wave, the SA of the SSA-II model can be expressed as
where
represents the Fourier transform of the surface elevation.
denotes the incident wave power captured by the rough surface. The kernel functions
and
are
matrices describing transitions of the EM waves of various polarizations into each other, which are mainly dependent on the configuration angles, polarizations, boundary conditions, and the permittivity of the lower medium. In fact, Bragg’s scattering is described by function
in SSA, and the term relates to the function
proportional to the slopes of a rough surface rather than to the elevations themselves. The corresponding details of these two kernel functions can be found in [
31]. Thus, the average scattering coefficient can be expressed as
where the angle brackets denote the ensemble average over random surface realizations. Furthermore, the Doppler spectrum can be defined as the power spectral density of the random time-varying scattering amplitude and can be evaluated by utilizing a standard spectral estimation technique by the following equation
where
is the backscattering amplitude from rough surface at time
. It should be noted that when calculating the Doppler spectra of the land–sea junction composite rough surface, the sea surface is time-evolving, whereas the ground surface is constant and time-independent.
To quantitatively measure the Doppler spectrum, the Doppler shift
, that is, the spectral centroid, and the bandwidth of the Doppler spectrum
can be defined as
where
represents the horizontal motion between ocean waves and observation radar, which can be used to invert the propulsion velocity of ocean waves.
is mainly caused by the up-and-down motion of the points on the sea surface profile.
4. Numerical Results and Discussion
To validate SSA-II, a comparison of monostatic scattering coefficients of the sea surface derived from SSA-II with those from 3 months of Seasat microwave scatterometer (SASS) measurements [
32] is performed and shown in
Figure 7 under wind speed
and
for Ku-band (14.6 GHz) to validate SSA-II. According to the Debye expression [
33], the relative permittivity of sea water is
at sea water temperature of 20 °C and a salinity of 30 parts per thousand. The sampling interval is
, where
is electromagnetic wavelength. The size of the sea surface is
. The wind fetch is 100 km and 300 km. The wind direction is set as
, and the tapered incident wave is illuminated upwind to the sea surface with tapering parameter
. The final monostatic scattering coefficient is an ensemble average of 50 realizations of sea surface.
It can be seen in
Figure 7 that SSA-II is very consistent with the experimental data for both HH and VV polarizations. Additionally, the VV polarization has more accurate results than that of the HH polarization, especially at
. It is because the nonlinear effect of the sea surface is more obvious under HH polarization.
In the following, numerical simulations are performed at a frequency of . The relative permittivity of sea surface and ground surface are and , respectively. The length of three types of rough surfaces (sea surface, ground surface, and land–sea junction composite rough surface) is , with sampling interval of . The tapering parament is set to be . The water depth and wind fetch are fixed at 5 m and 30 km, respectively. For the ground surface, the correlation length and root mean square height are and , respectively. All numerical results are derived by averaging 50 surface realizations.
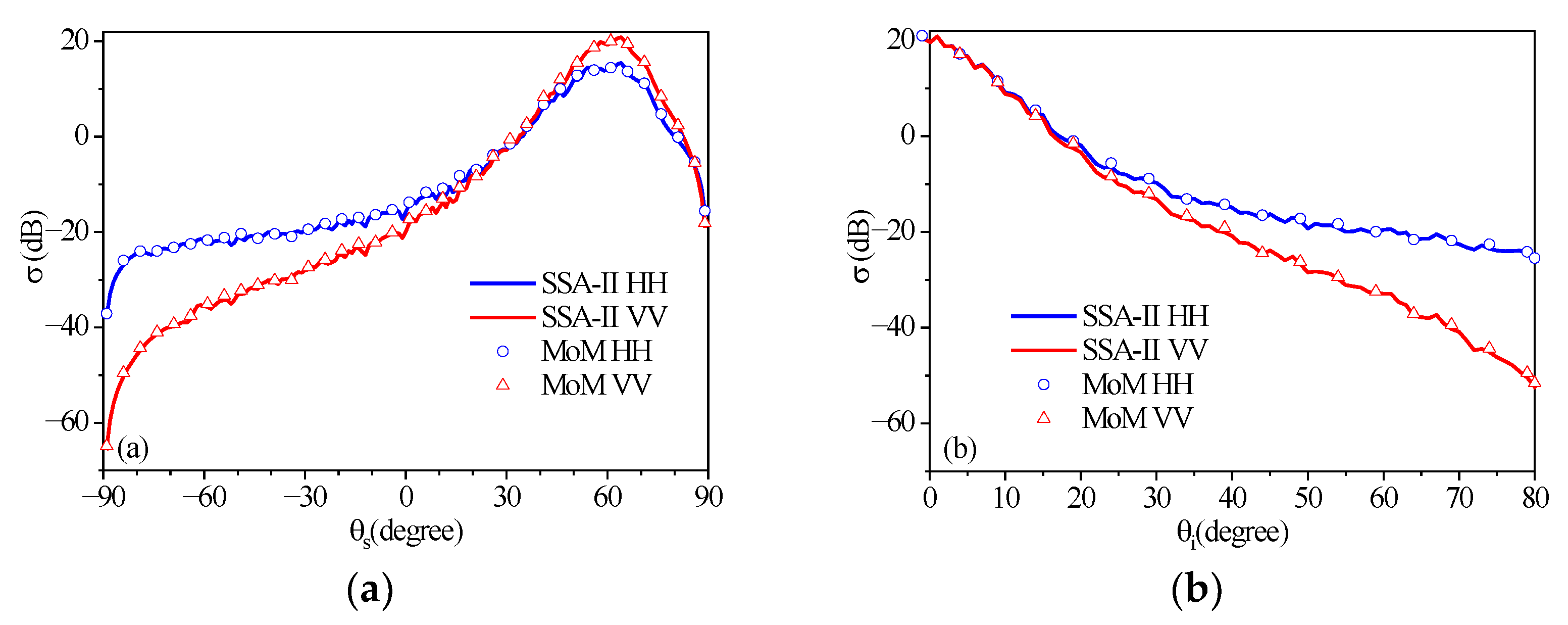
Figure 8 is a comparison of the bistatic and monostatic scattering coefficients of the land–sea junction composite rough surface derived by SSA-II and MoM. In the simulation, the wind speed is
in an upwind direction. The incident angle is
, and the incident azimuth angle and scattering azimuth angle are both set to
. It can be seen from
Figure 8 that the scattering coefficient lines evaluated by SSA-II and MoM show a rather good agreement in both bistatic and monostatic scattering problems.
Figure 9 shows the comparison of the bistatic scattering coefficients of the finite-depth sea surface, the ground surface, and the land–sea junction composite rough surface. The wind speed, incident angle, and incident (scattering) azimuth angle are the same as those in
Figure 8.
Figure 9 shows that under HH and VV polarizations, the bistatic scattering coefficients of three different types of rough surfaces exhibit spikes in the mirror direction of the incident wave. Regardless of polarization, the bistatic scattering coefficient of a land–sea junction composite rough surface is similar to but smaller than that of a finite-depth sea surface. The bistatic scattering coefficient of the ground surface is much smaller than that of the sea surface and that of the land–sea junction composite rough surface’s overall scattering angles. This is because the ground surface is much flatter than the sea surface in this simulation.
Figure 10 depicts a comparison of the monostatic scattering coefficients of the finite-depth sea surface, the ground surface, and the land–sea junction composite rough surface. The parameters used in the simulation are the same as those in
Figure 9. A similar conclusion can be derived from
Figure 9 and
Figure 10.
The comparison of the bistatic scattering coefficients of a land–sea junction composite rough surface with different root mean square heights is shown in
Figure 11. The simulating parameters are the same as those in
Figure 9, except that the root mean square of the ground region is set at 0.1 m, 0.3 m, and 0.5 m. From
Figure 11, it can be seen that the peak value of the bistatic scattering coefficient decreases with the increase of the root mean square of ground for HH and VV polarizations. However, for HH and VV polarizations, the bistatic scattering coefficient increases with the increase of the root mean square of the ground at the moderate and large scattering angles (
and
). This is because as the root mean square increases, so does the degree of ground fluctuation, and more energy is scattered rather than reflected. It can also be found that the scattering coefficient increases with the increase of the root mean square of the ground when the scattering angle
for cross-polarization.
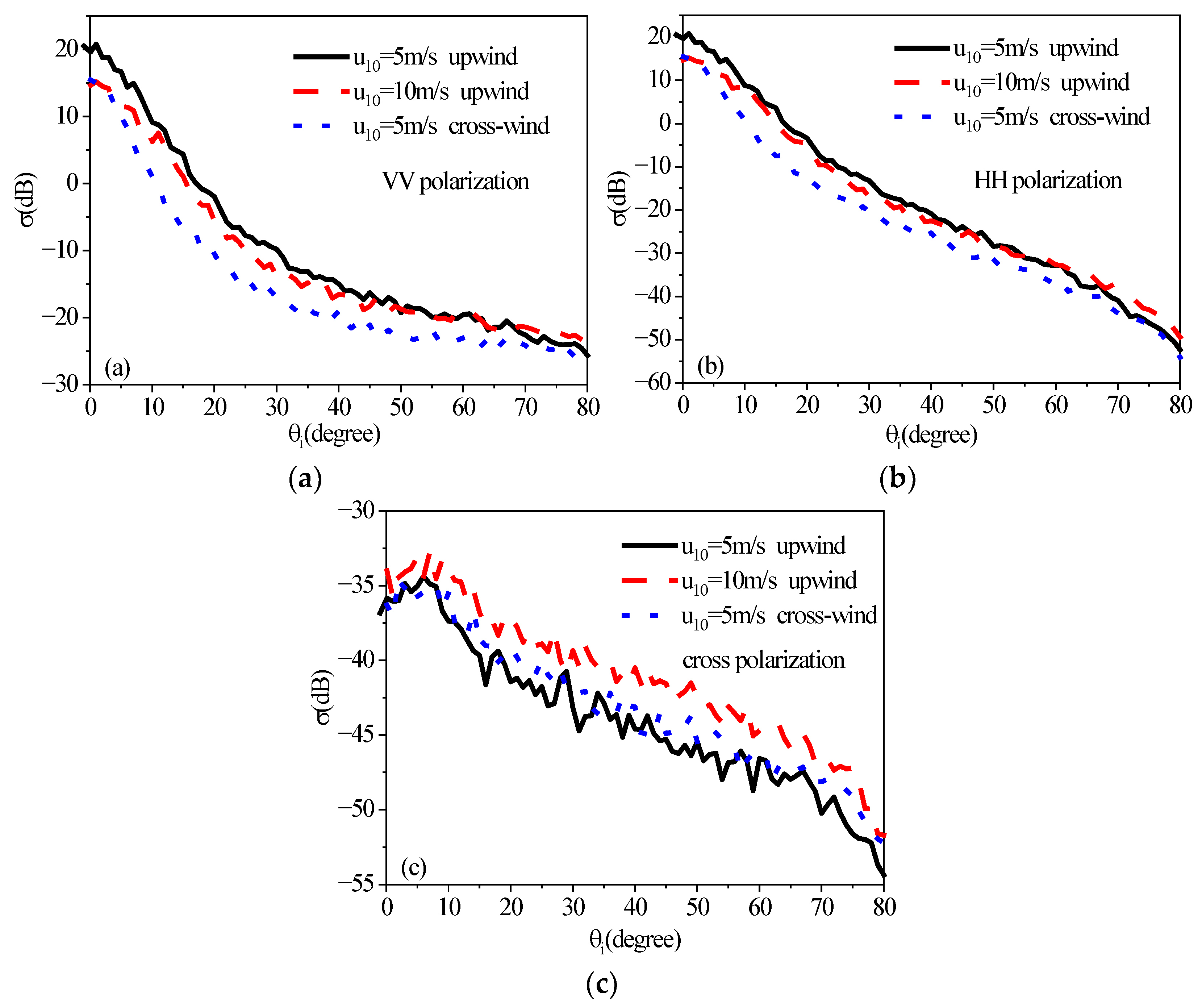
The monostatic scattering coefficients of the land–sea junction composite rough surface versus different wind speeds and wind directions are illustrated in
Figure 12. The simulating parameters are the same as in
Figure 9, except that the wind speed is set at 5m/s and 10 m/s in upwind and crosswind directions, respectively. As shown in
Figure 12, the monostatic scattering coefficient of the land–sea junction composite rough surface decreases with the increase of the wind speed at moderate and small incident angles (
) and increases with the increase of the wind speed at large incident angles (
) under HH and VV polarizations. However, for cross-polarization, the monostatic scattering coefficient increases with the increase in wind speed over all incident angles. It can also be found that the monostatic scattering coefficient under cross wind is smaller than that under upwind for co-polarization and is greater than that under upwind for cross-polarization.
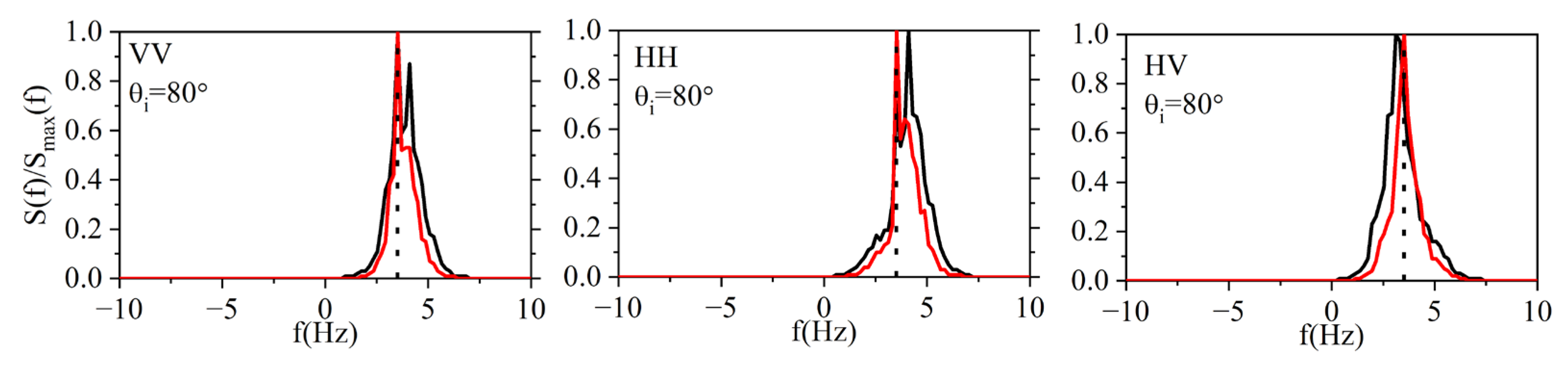
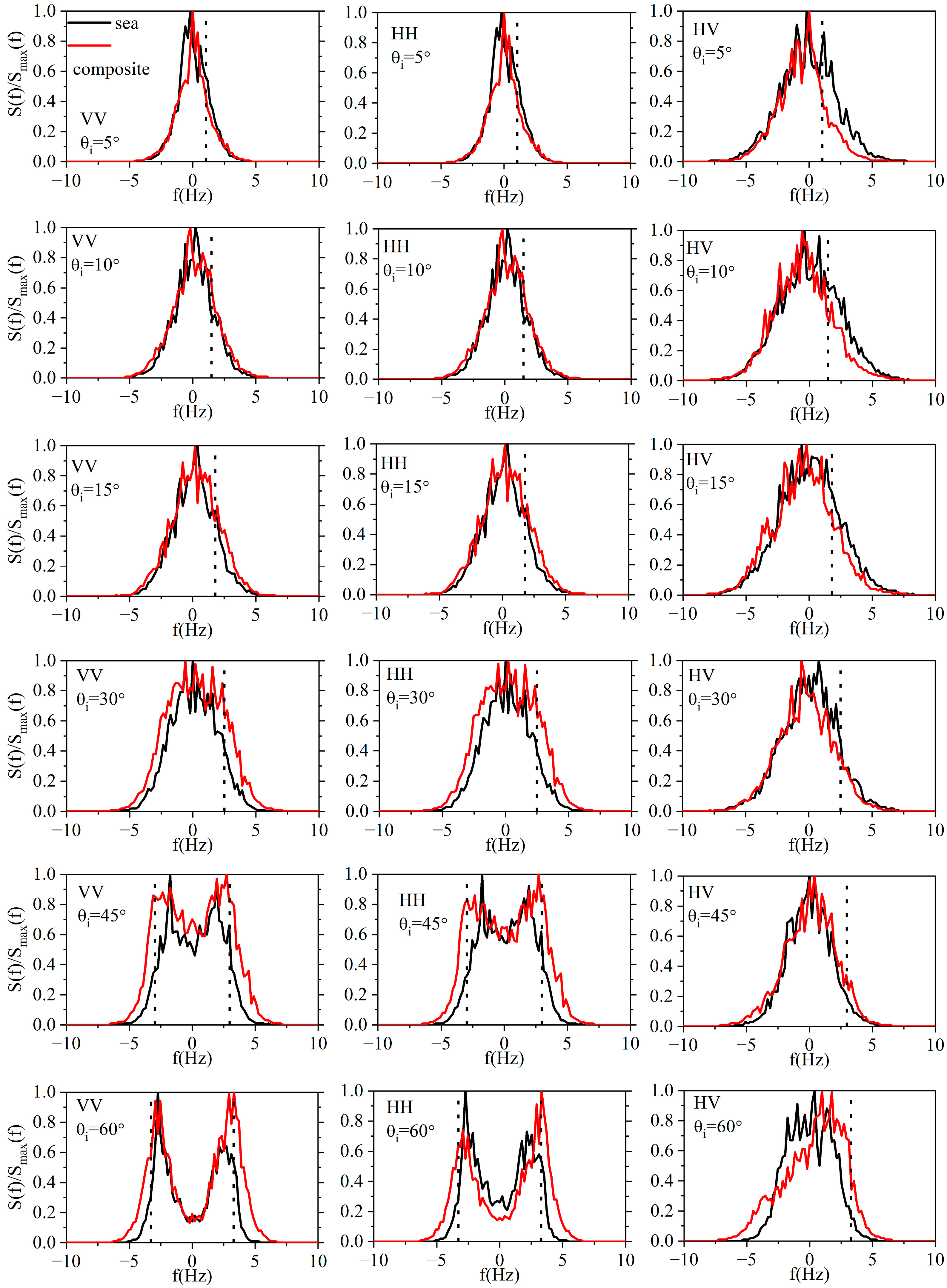
Figure 13 and
Figure 14 show the average Doppler spectra of backscattered echoes from the finite-depth sea surface and the land–sea junction composite rough surface. The surface area, the corresponding sample interval, and the incident wave frequency are the same as those in the aforementioned scattering coefficient simulation. The wind speeds are
and
in
Figure 13 and
Figure 14, respectively. The radar is looking upwind, with the incident angle changing from
to
. All of the results were averaged over 50 realizations of rough surfaces. Both co-polarization and cross-polarization results are presented. Due to the reciprocity of HV polarization and VH polarization in backscattering, only HV polarized Doppler spectra are presented. The corresponding Bragg frequencies
are also plotted in
Figure 13 and
Figure 14 with vertical short-dotted lines.
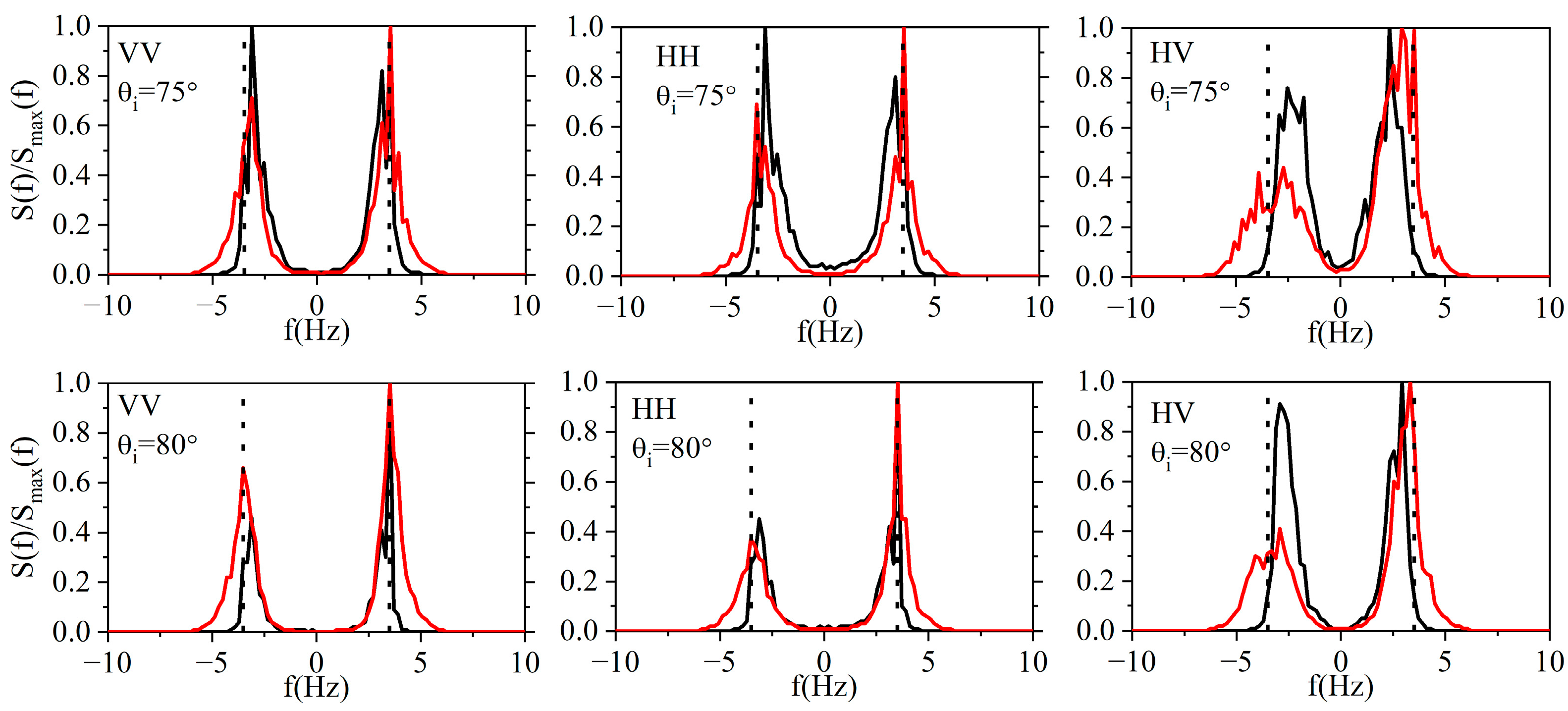
Figure 13 and
Figure 14 show that as the incident angle increases, the bandwidth of the Doppler spectrum widens first and then narrows, and the spectral peak moves closer to the corresponding Bragg frequency for both the finite-depth sea surface and the land–sea junction composite rough surface. Compared with co-polarization, the cross-polarized Doppler spectra are much closer to the corresponding Bragg frequency. This attributes to the fact that the specular reflection plays a leading role in small and moderate incident angles, whereas the Bragg scattering is the primary scattering mechanism in large incident angles. It can also be observed that the Doppler spectra of the land–sea junction composite rough surface are narrower than those of the finite-depth sea surface for both co-polarization and cross-polarization. In addition, it is readily observed that the movement tendency of the Doppler spectral peak is different between co-polarization and cross-polarization. For the co-polarization case, the corresponding frequency of the Doppler spectral peak of the land–sea junction composite rough surface is smaller than that of the finite-depth sea surface, while for the cross-polarization case, the corresponding frequency of the Doppler spectral peak of the land–sea junction composite rough surface is greater than that of the finite-depth sea surface.
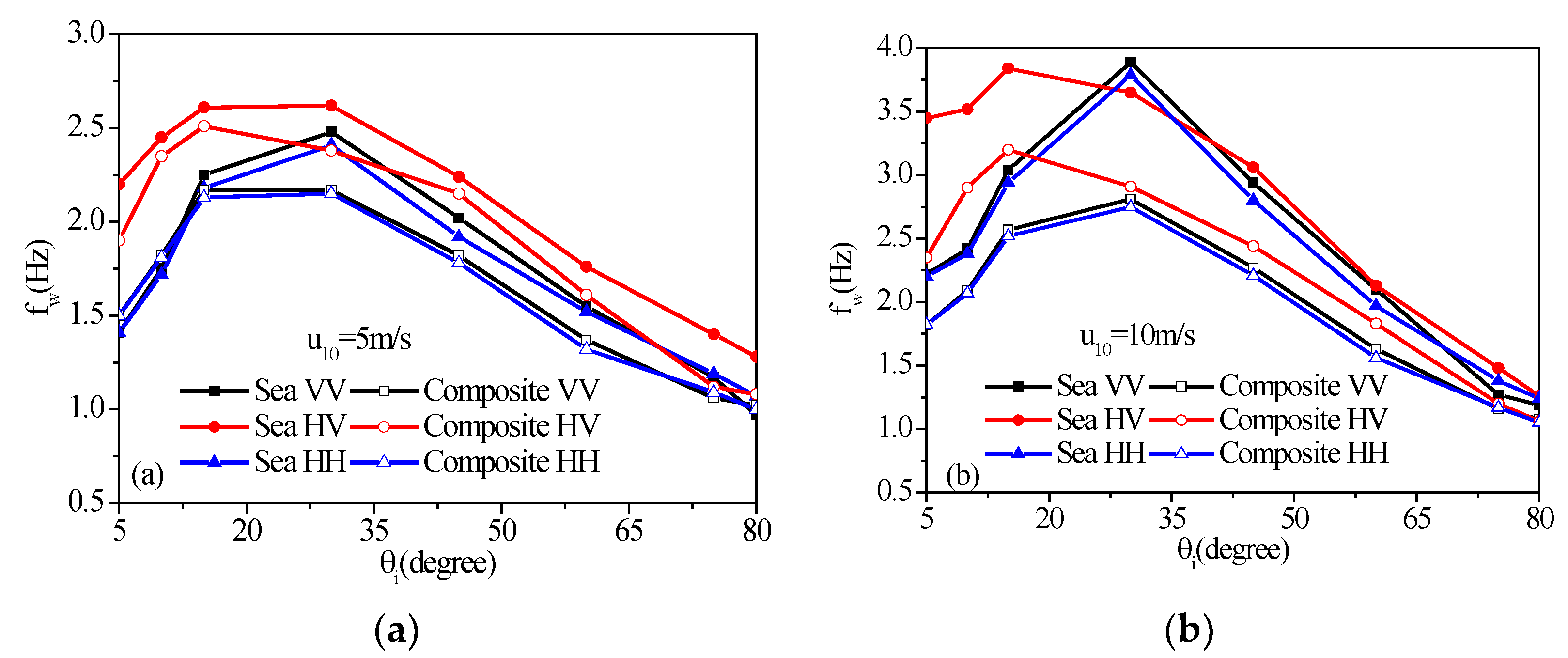
A quantitative comparison of the Doppler shifts (calculated by Equation (16)) and Doppler spectral bandwidths (calculated by Equation (16)) between the finite-depth sea surface and the land–sea junction composite rough surface is shown in
Figure 15 and
Figure 16, respectively. Similar conclusions can be derived from
Figure 15 and
Figure 16 as those derived from
Figure 13 and
Figure 14.
A comparison of average Doppler spectra of backscattered echoes from finite-depth sea surface and land–sea junction composite rough surface under cross wind is shown in
Figure 17. The simulating parameters are the same as those in
Figure 13, except that the wind direction is set to
, which indicates that the radar is looking crosswind. It can be readily observed that only one peak appears when the incident angle is smaller than
under co-polarization and smaller than
under cross-polarization. However, with the increase in incident angle, two distinct peaks appear for both co- and cross-polarization. These two peaks correspond to the fact that the ocean waves are moving toward and away from the radar. Different from
Figure 13,
Figure 14,
Figure 15 and
Figure 16, it can be obviously observed from
Figure 17 that the Doppler spectra of the land–sea junction composite rough surface is wider than that of the finite-depth sea surface. In addition, the Doppler spectral peak of the land–sea junction composite rough surface shifts to anhigher frequency relative to that of the finite-depth sea surface.


 ,
, 

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}