
An Image Quality Improvement Method in Side-Scan Sonar Based on Deconvolution


Abstract
:1. Introduction
- (1)
- A high-quality imaging method suitable for a sonar system is proposed. To overcome the limitations of conventional pulse compression techniques, in which the distance resolution and “main lobe to side lobe ratio” are hard to improve, a deconvolution-based method is adopted to improve the imaging quality of side-scan sonar. There are two main benefits. Firstly, this method improves distance resolution under certain bandwidth and array length conditions. Secondly, it improves the “main lobe to side lobe ratio”, thereby improving imaging clarity.
- (2)
- An improved deconvolution method is proposed based on the frequency response function of the sonar system. Based on the characteristics of the operating frequency response curve of actual sonar systems, an optimal reception response function suitable for sonar systems is proposed, which improves the practical adaptability of the method.
- (3)
- In order to verify the effectiveness of the proposed method, we used simulation and sea trial datasets. Firstly, the performance of this method under different signal-to-noise ratios and strong interference conditions was analyzed through numerical simulation. Then, by processing the sea trial data, the impact of this method on the imaging quality of large-scale imaging and small underwater targets, as well as on the imaging and autonomous segmentation of small underwater targets, was analyzed. Autonomous segmentation is an important component of autonomous detection. Good image quality helps to achieve high-precision object segmentation, which has positive significance for autonomous detection in downstream applications.
2. Methods
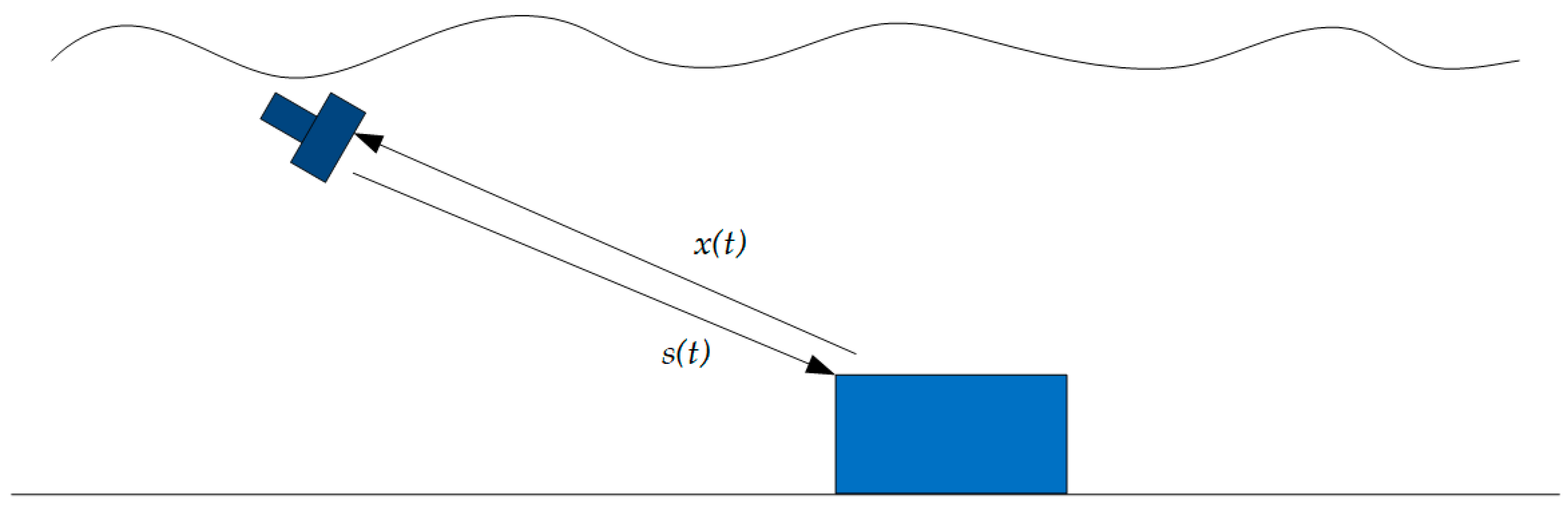
2.1. Range Resolution in Side-Scan Sonar Imaging
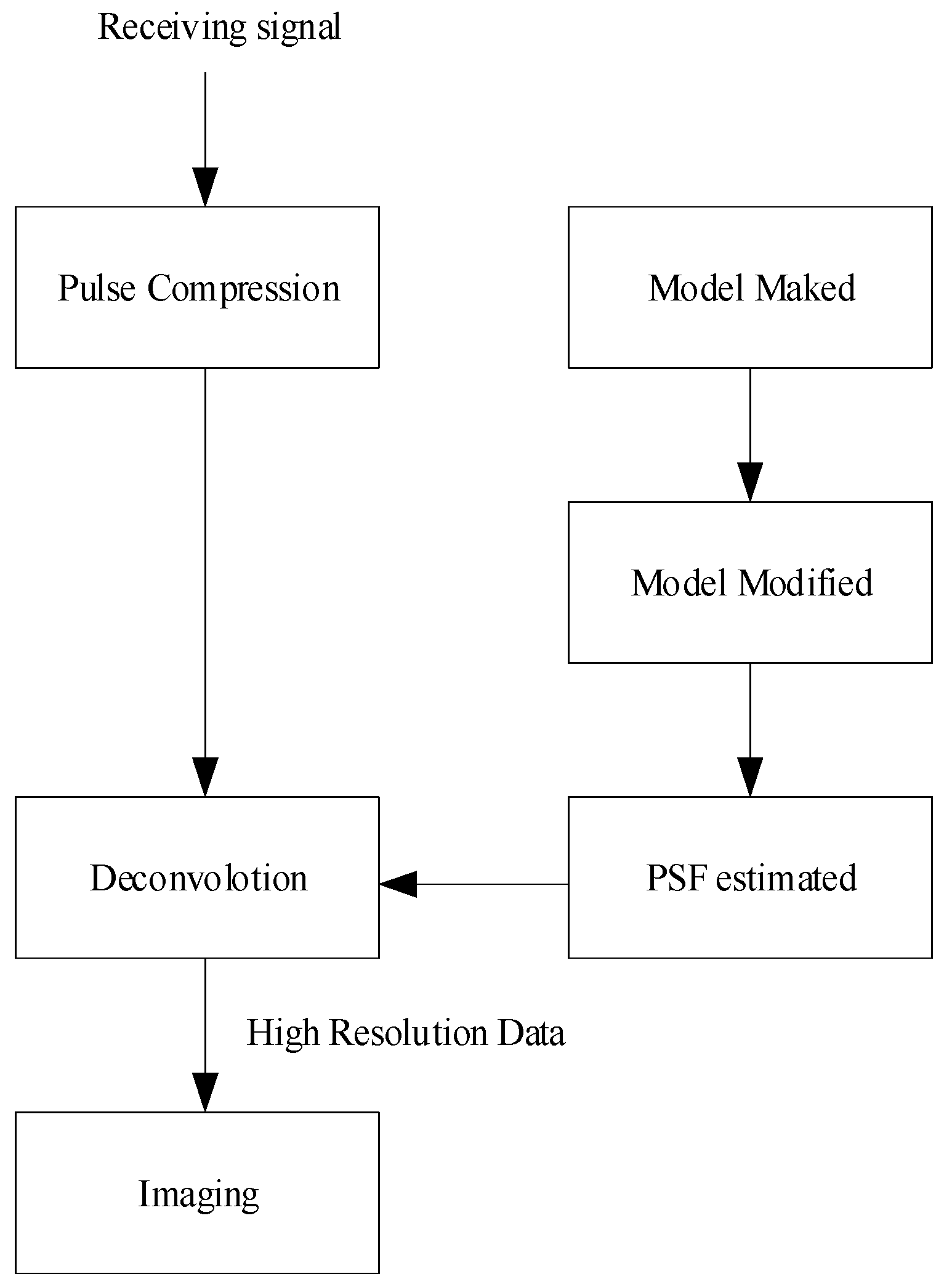
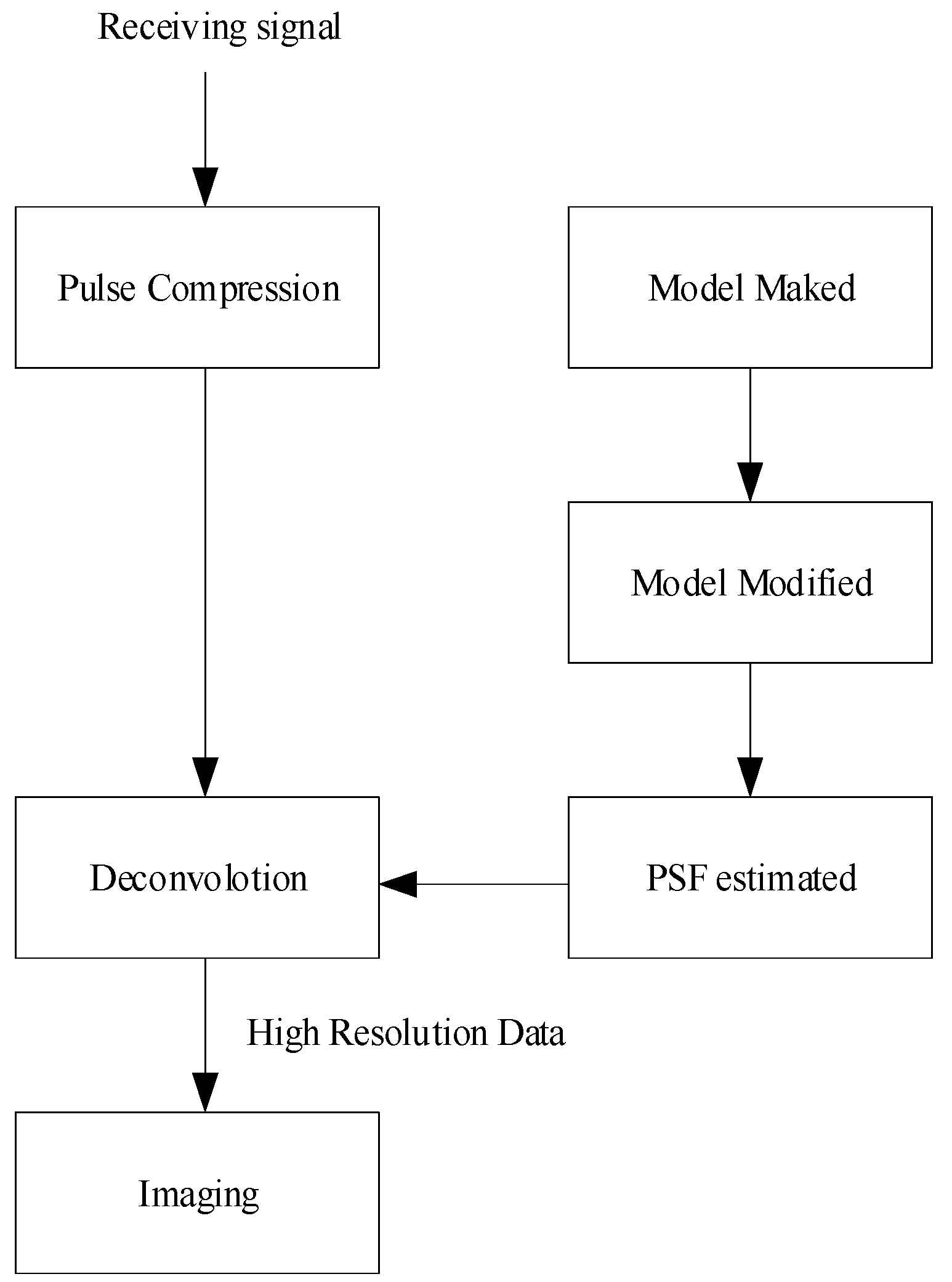
2.2. High-Resolution Pulse Compression Technology Based on Deconvolution
2.3. Calculation of Deconvolution
3. Results
3.1. Numerical Simulation
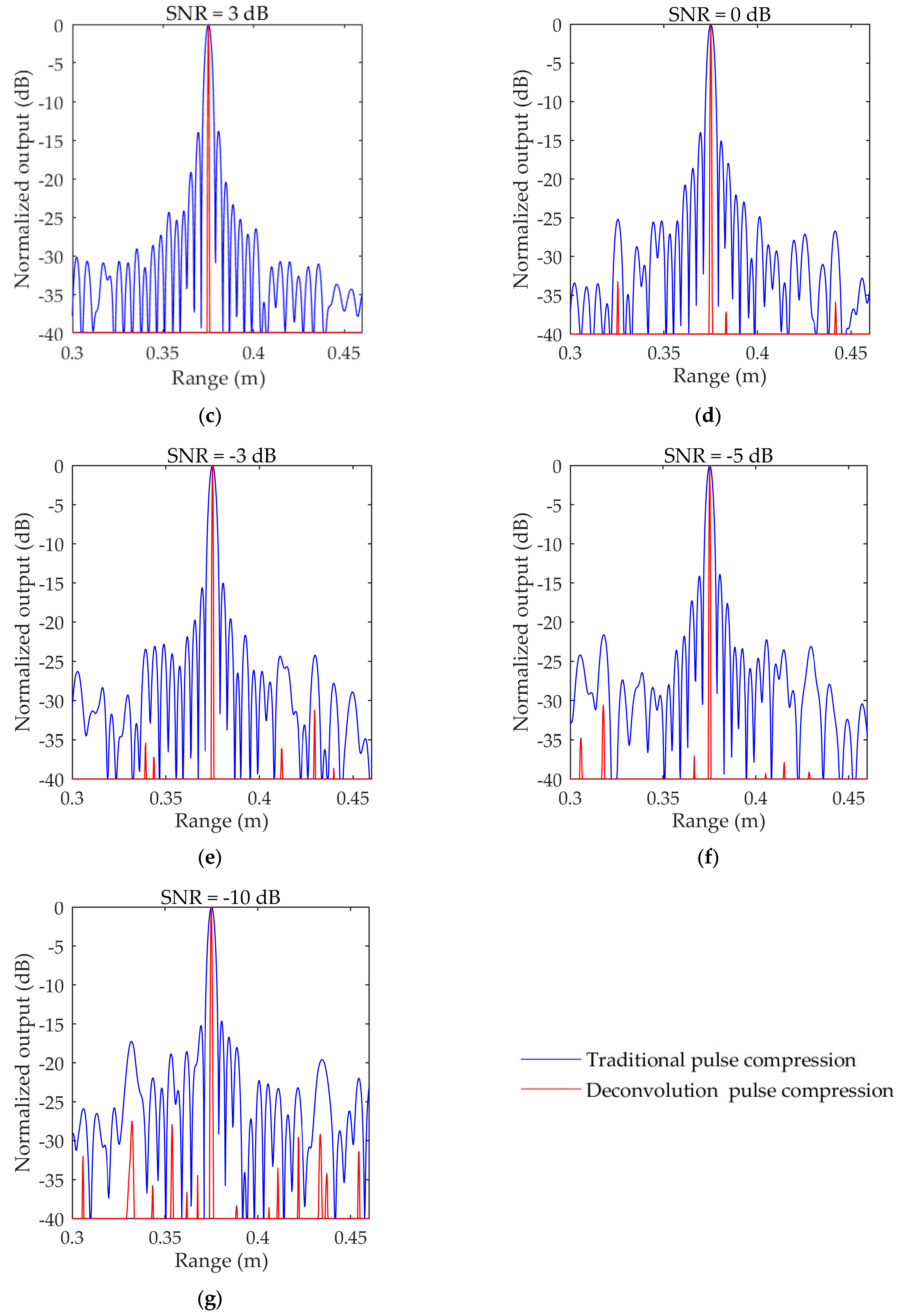
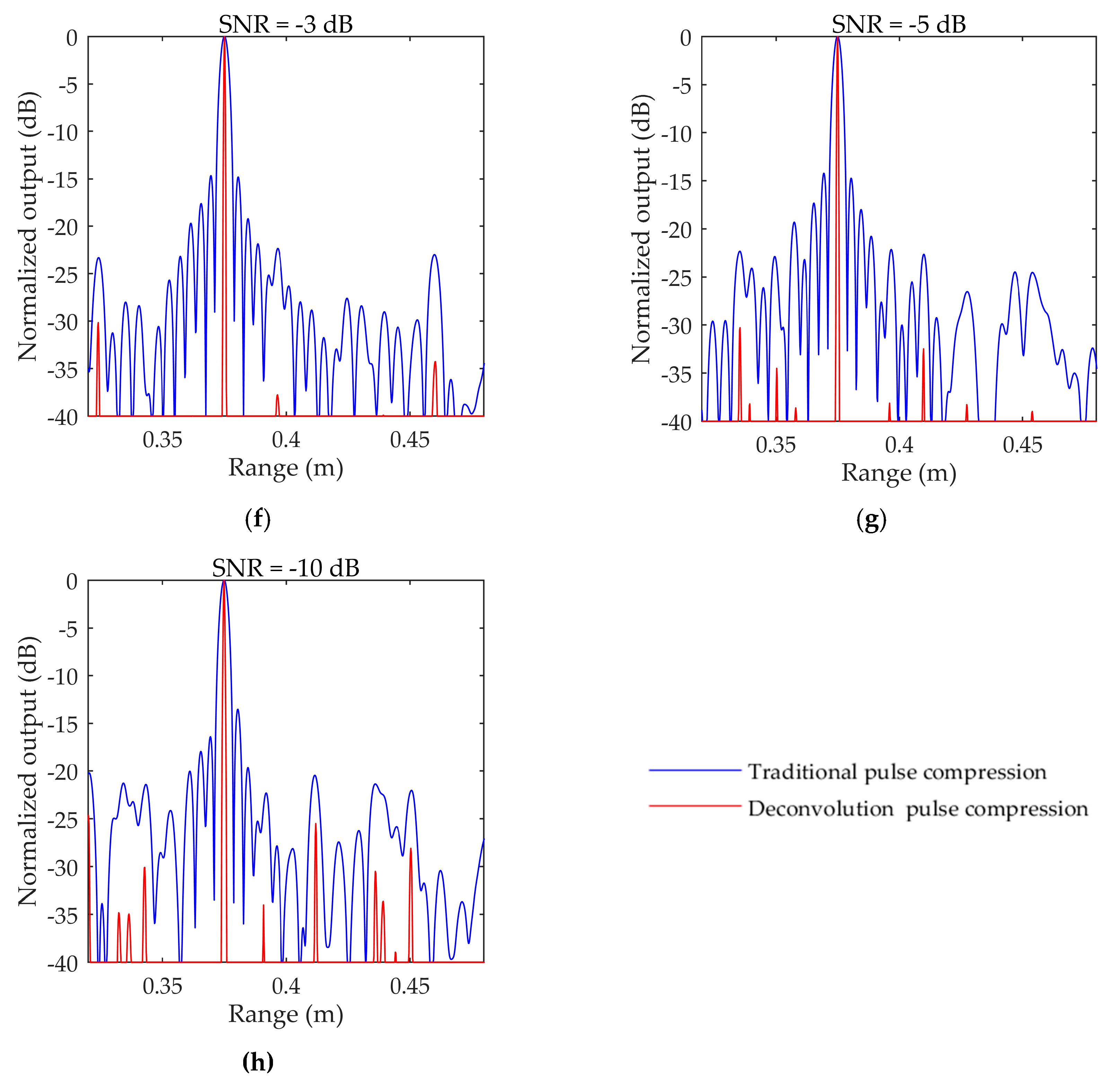
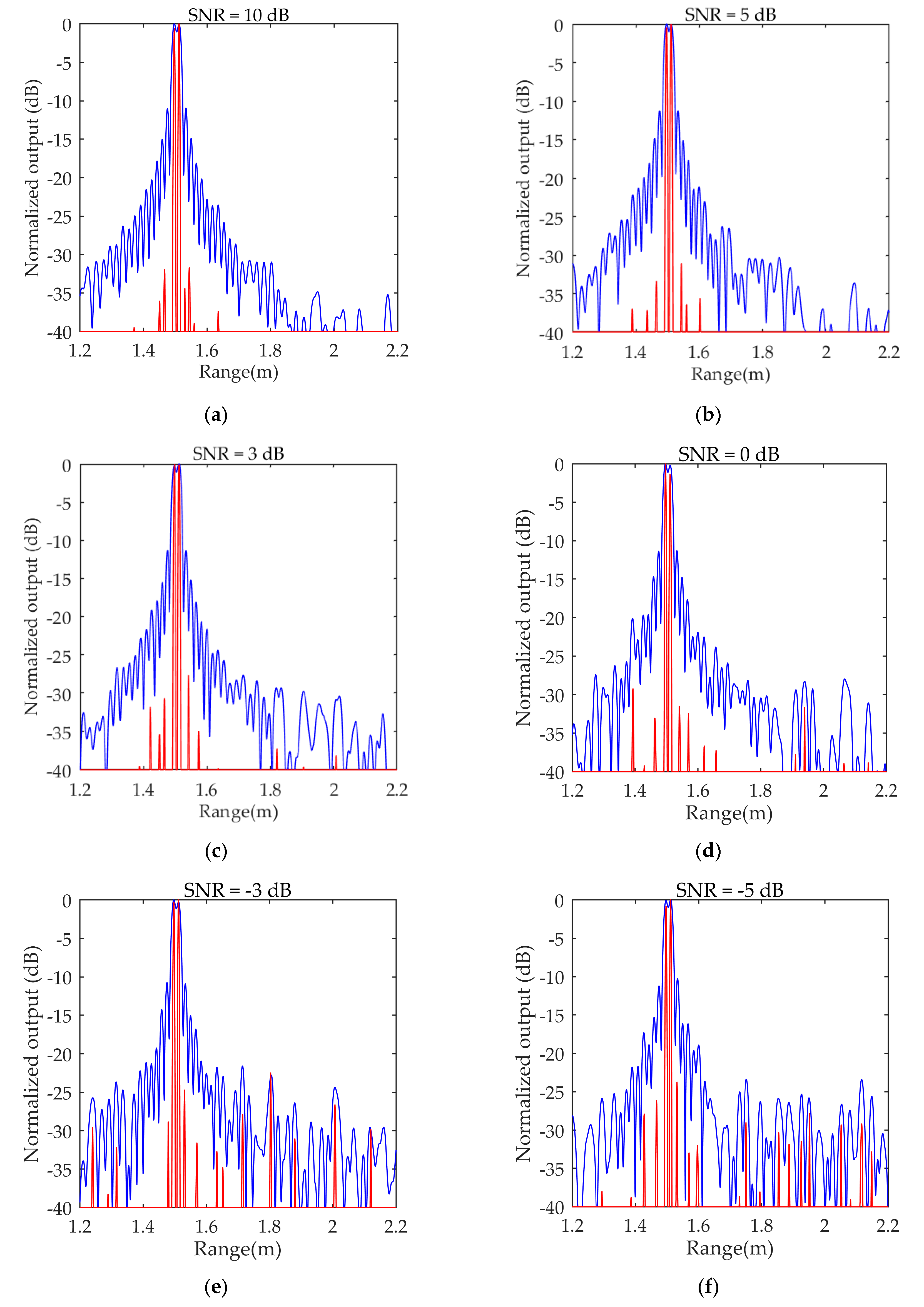
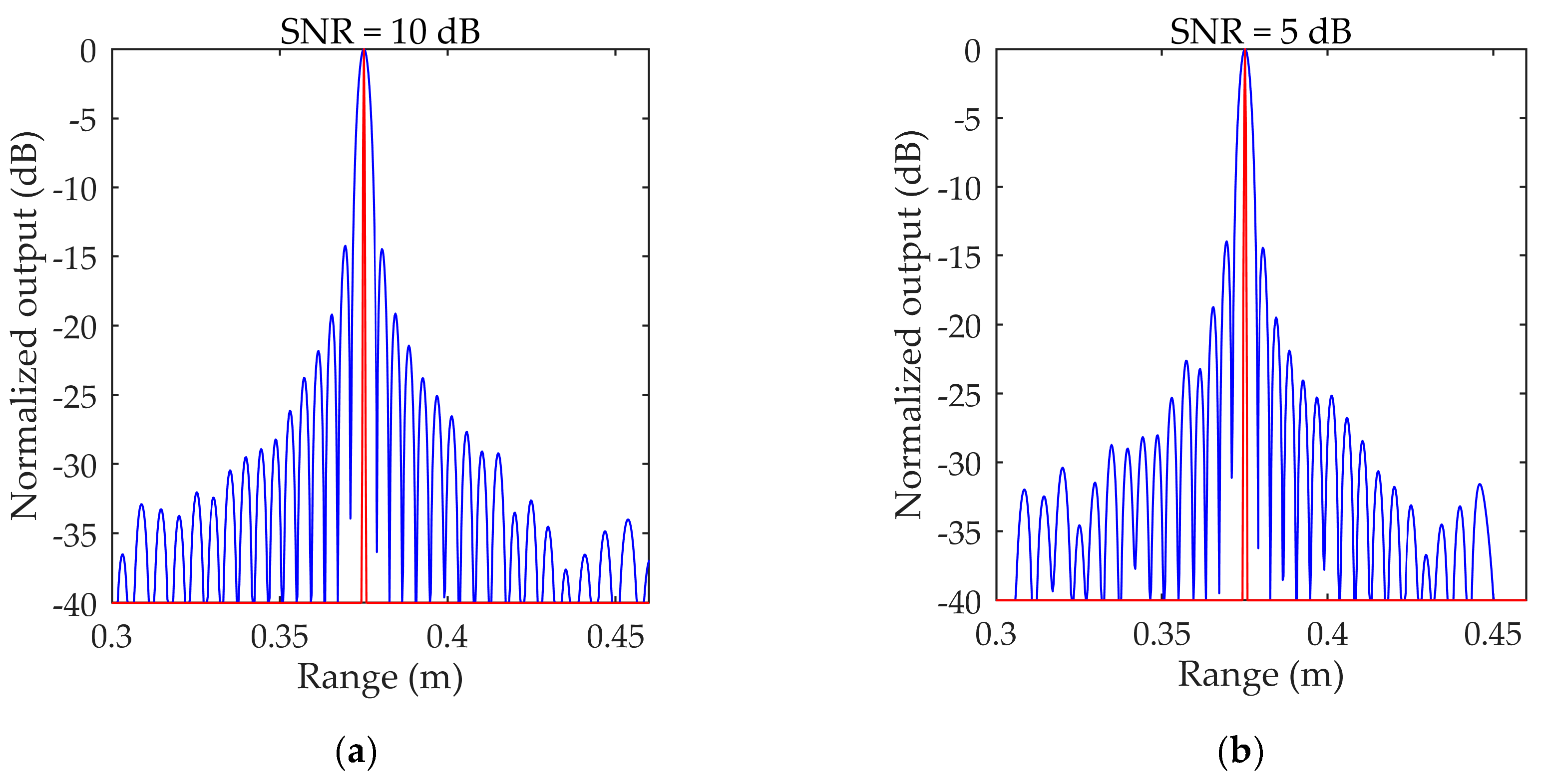
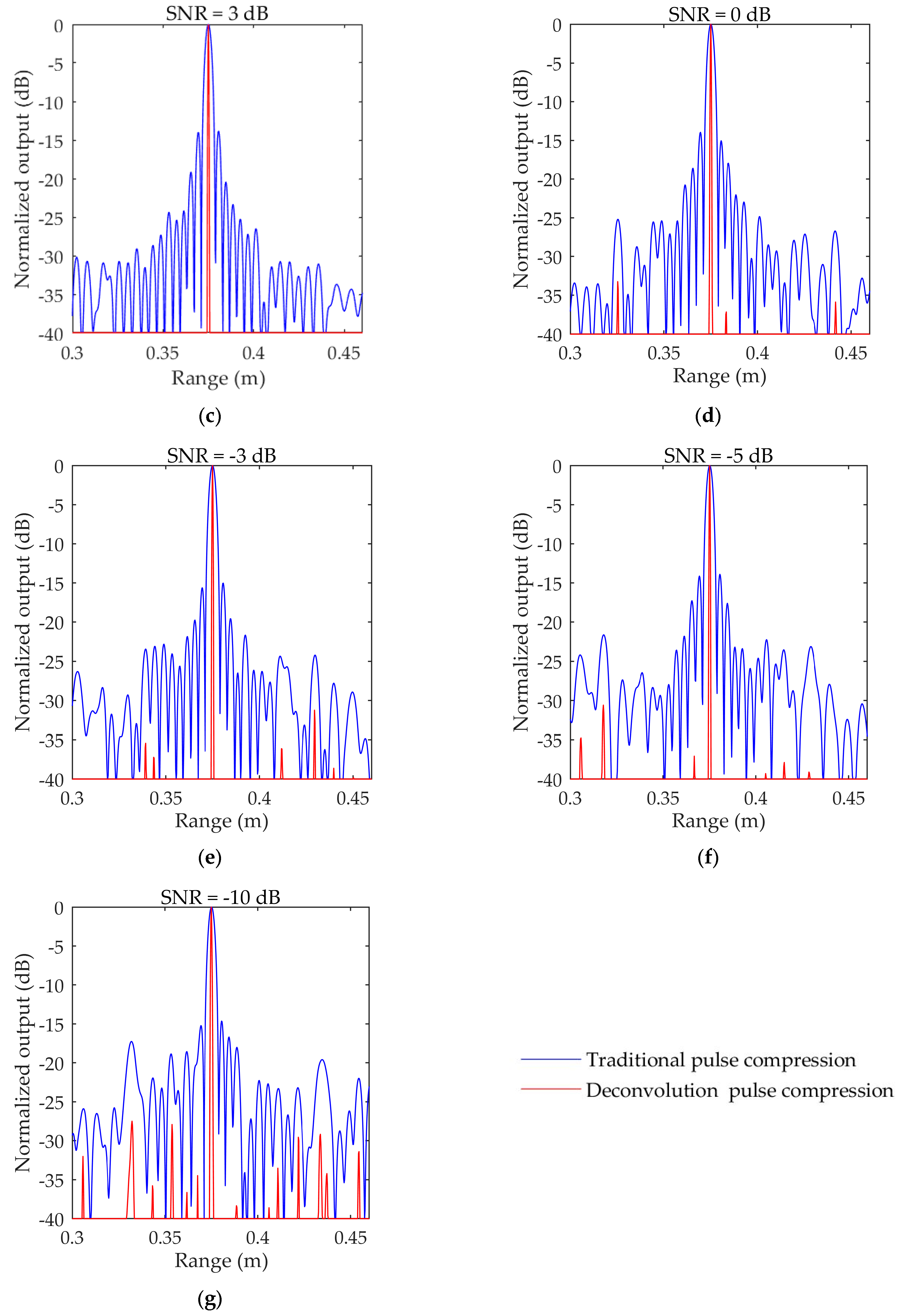
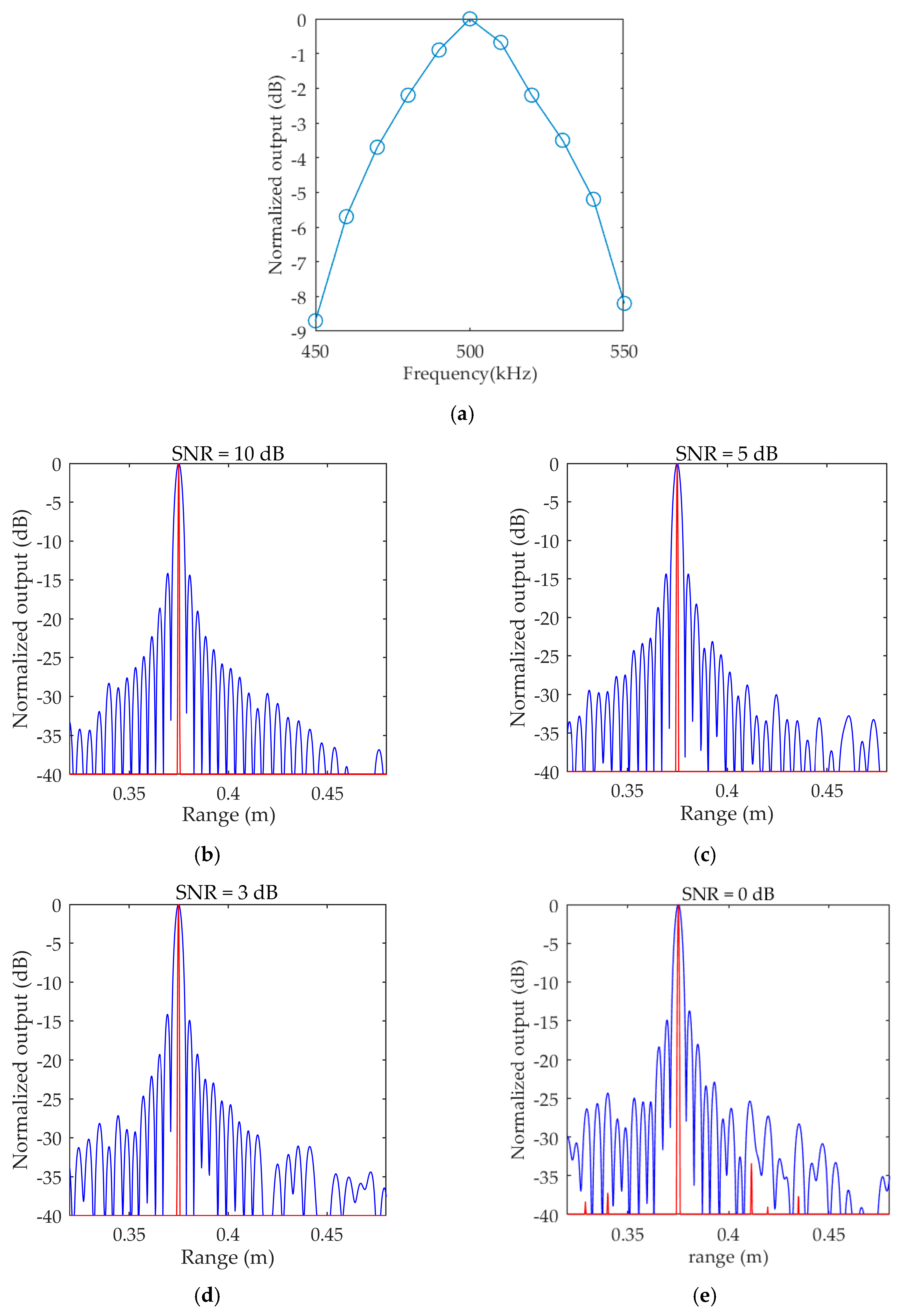
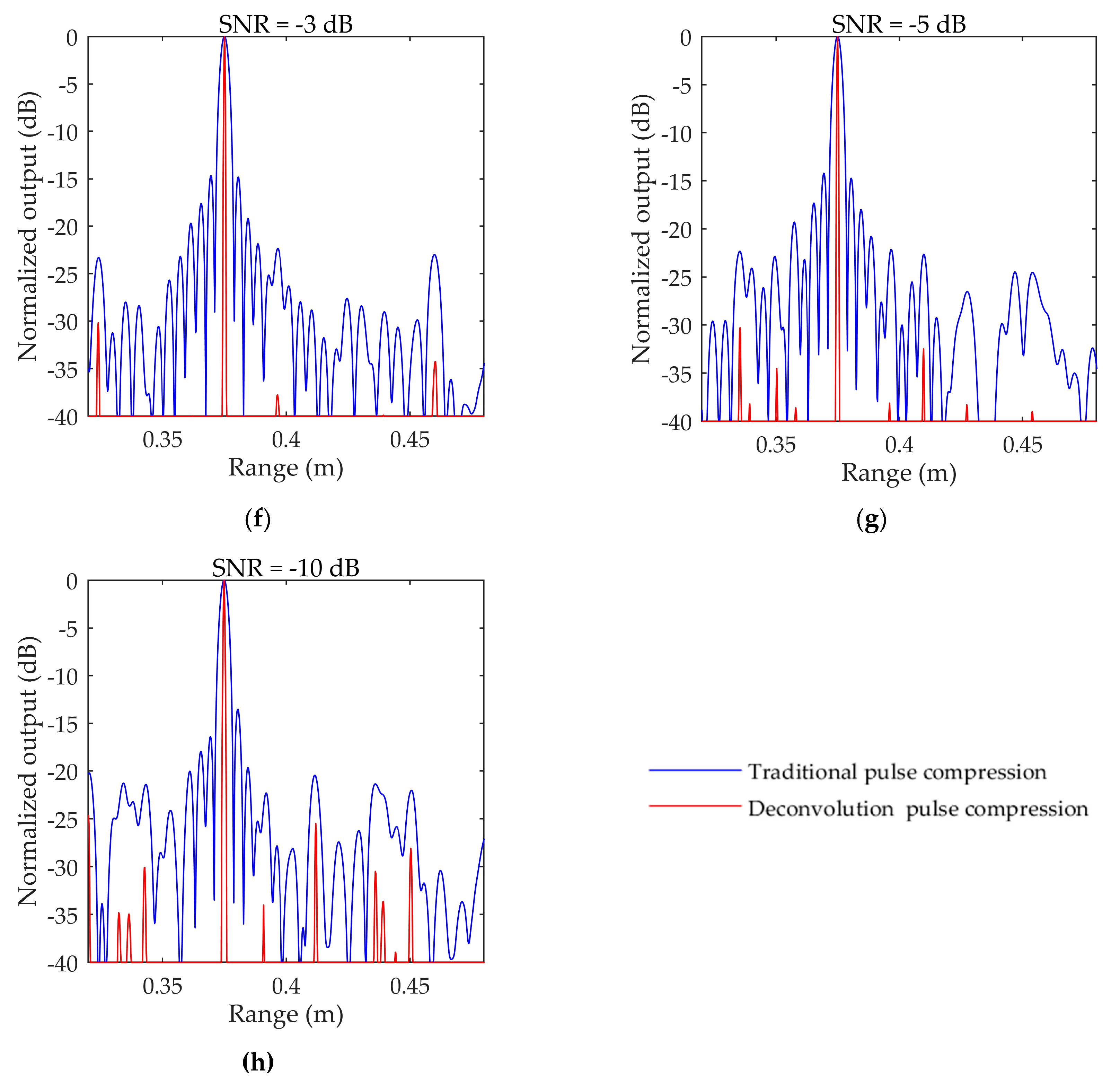
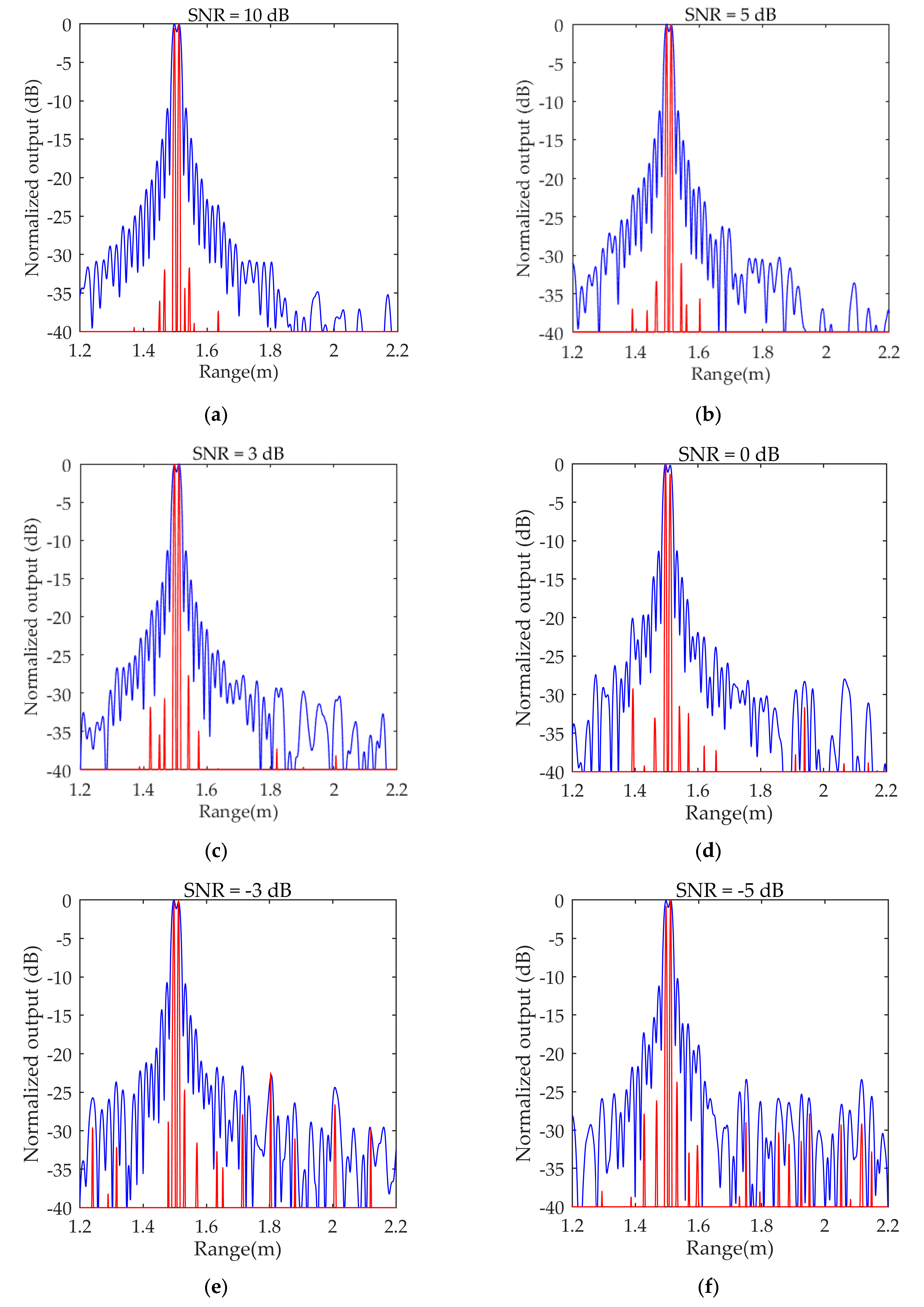
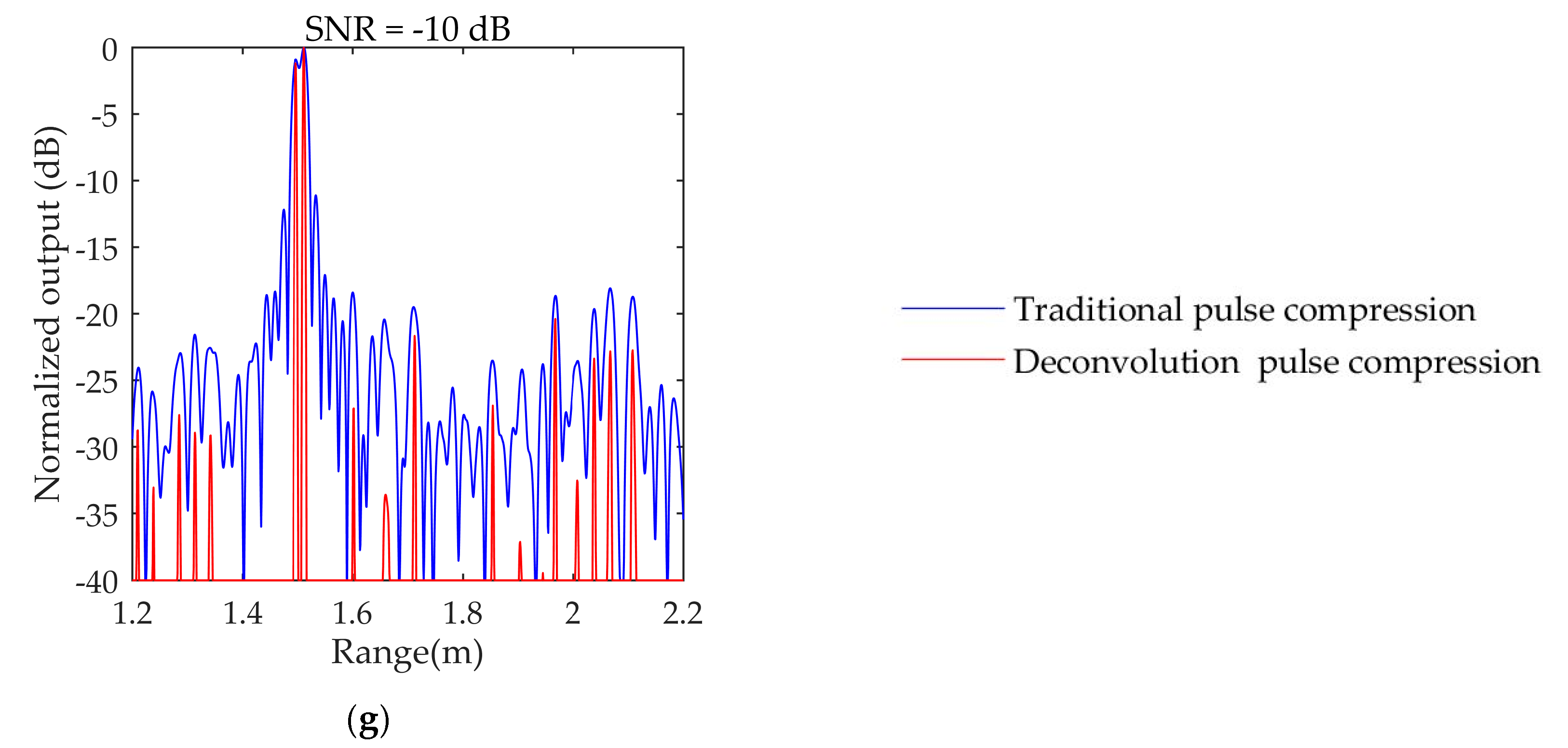
3.1.1. The Influence of Different SNRs
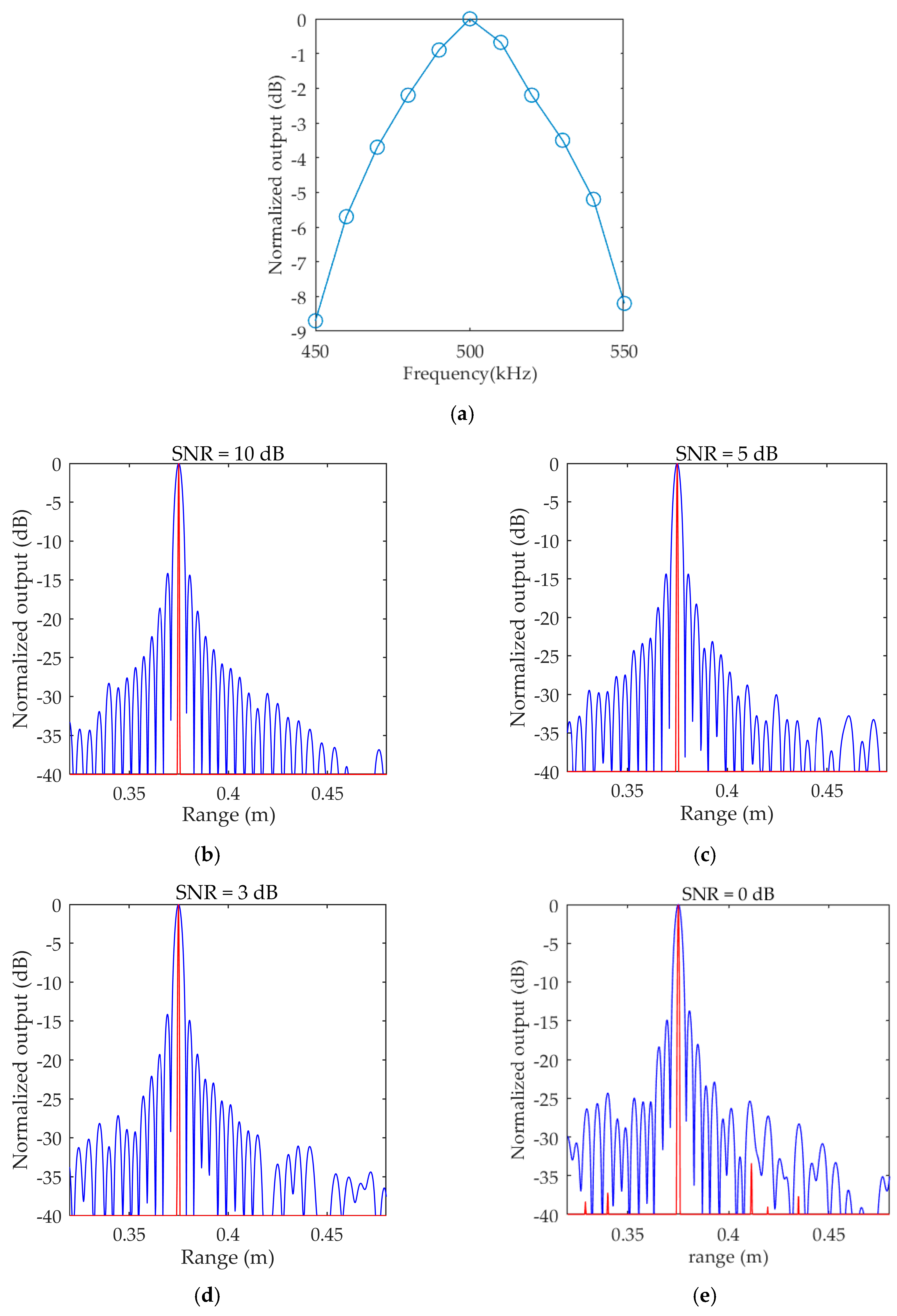
3.1.2. Considering the Influence of Sonar Parameters
3.1.3. The Impact on Strong Interference
3.1.4. The Impact on Imaging
3.2. Sea Experiment
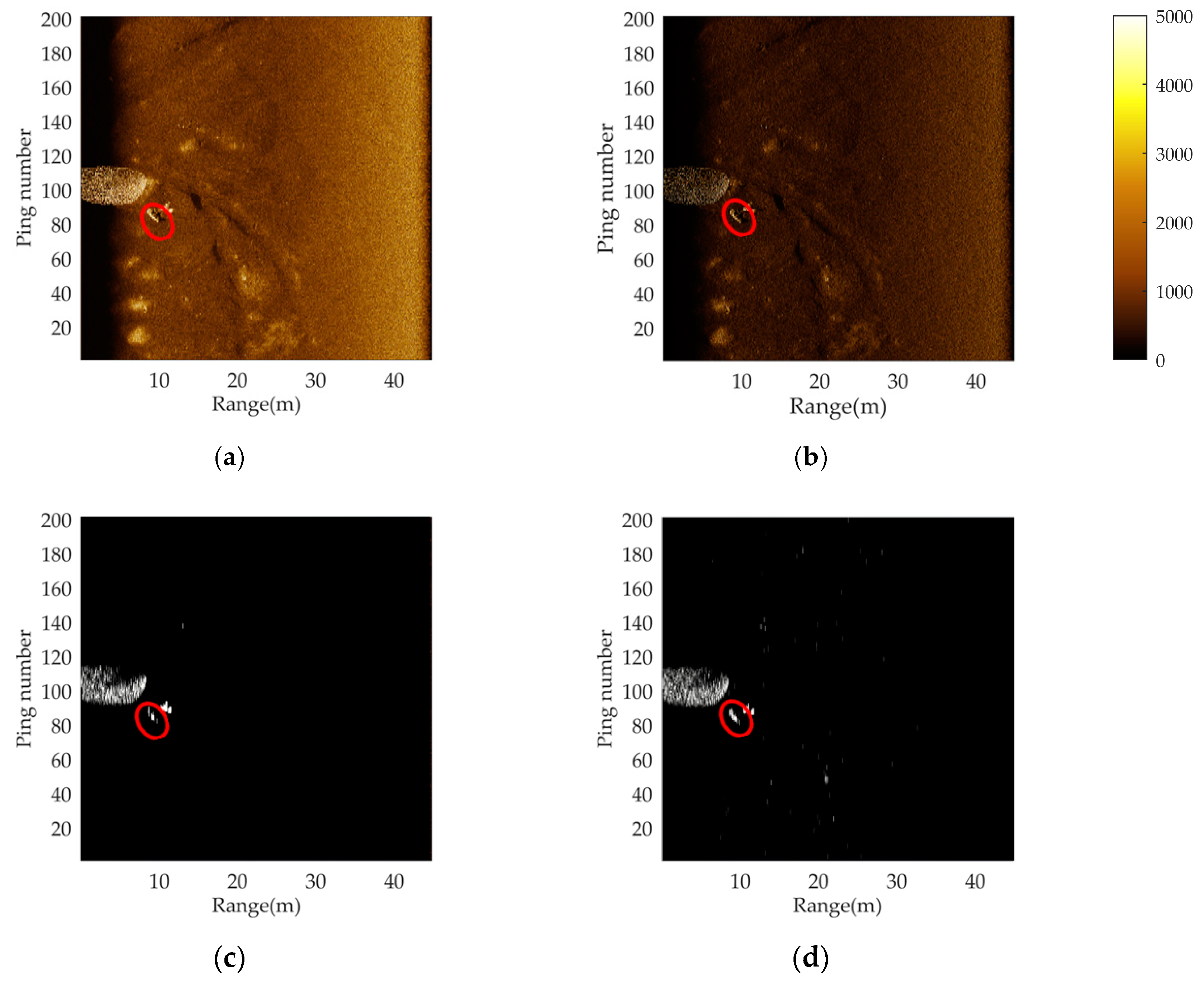
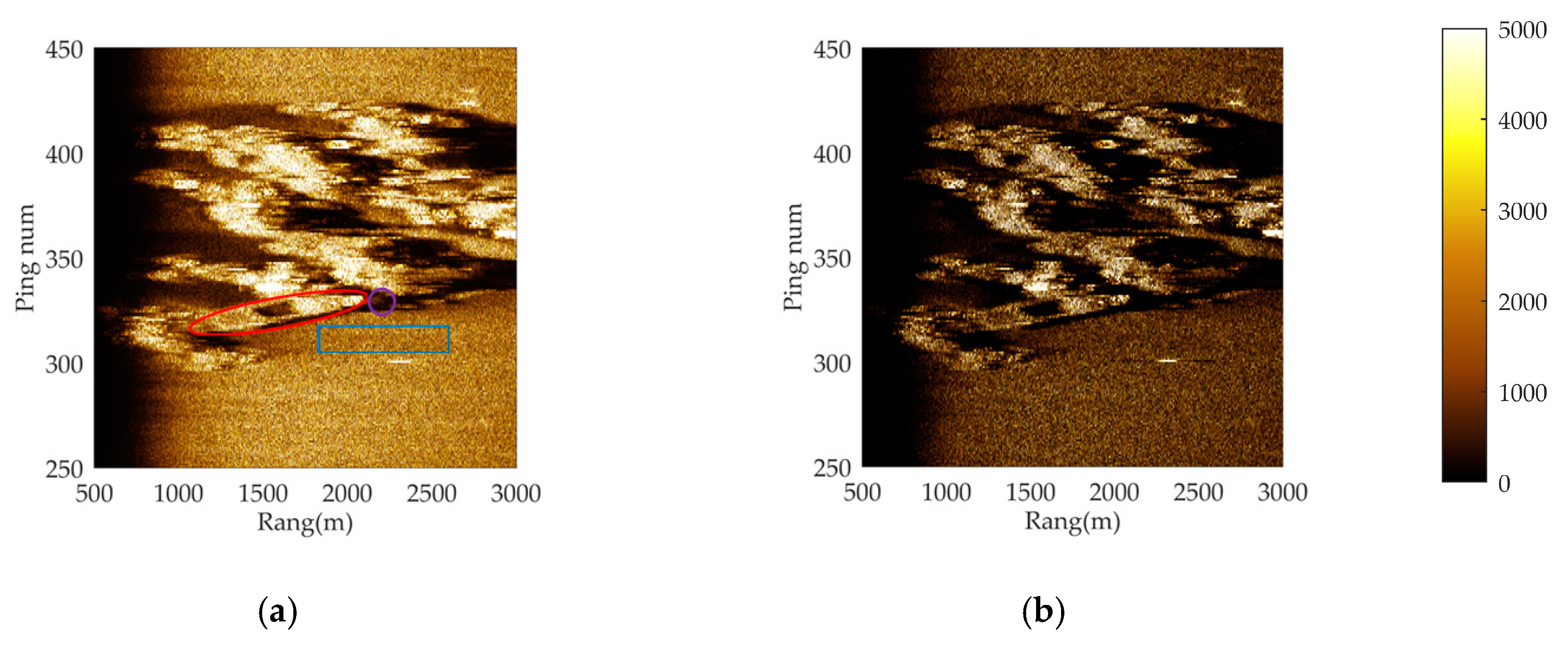
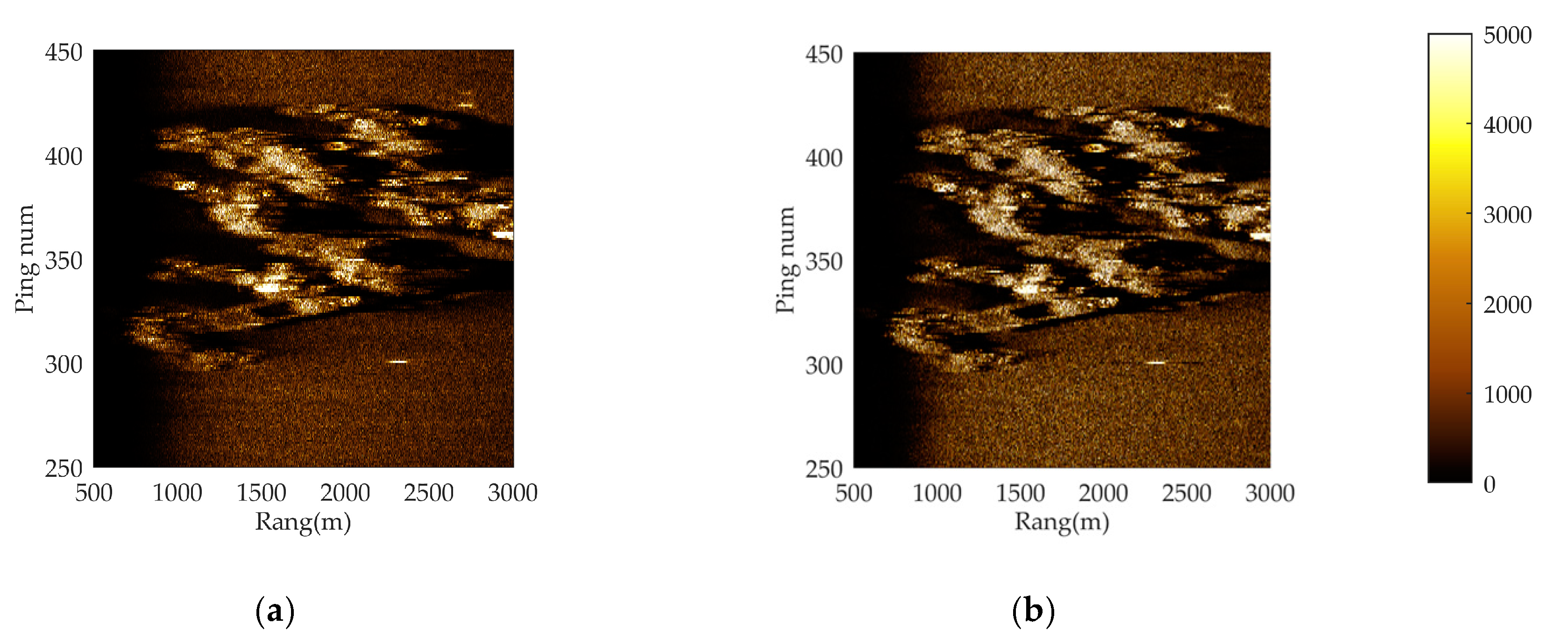
3.2.1. The Influence of the Algorithm on Seabed Imaging
Evaluation Indicators
Comparative Analysis of Imaging Quality
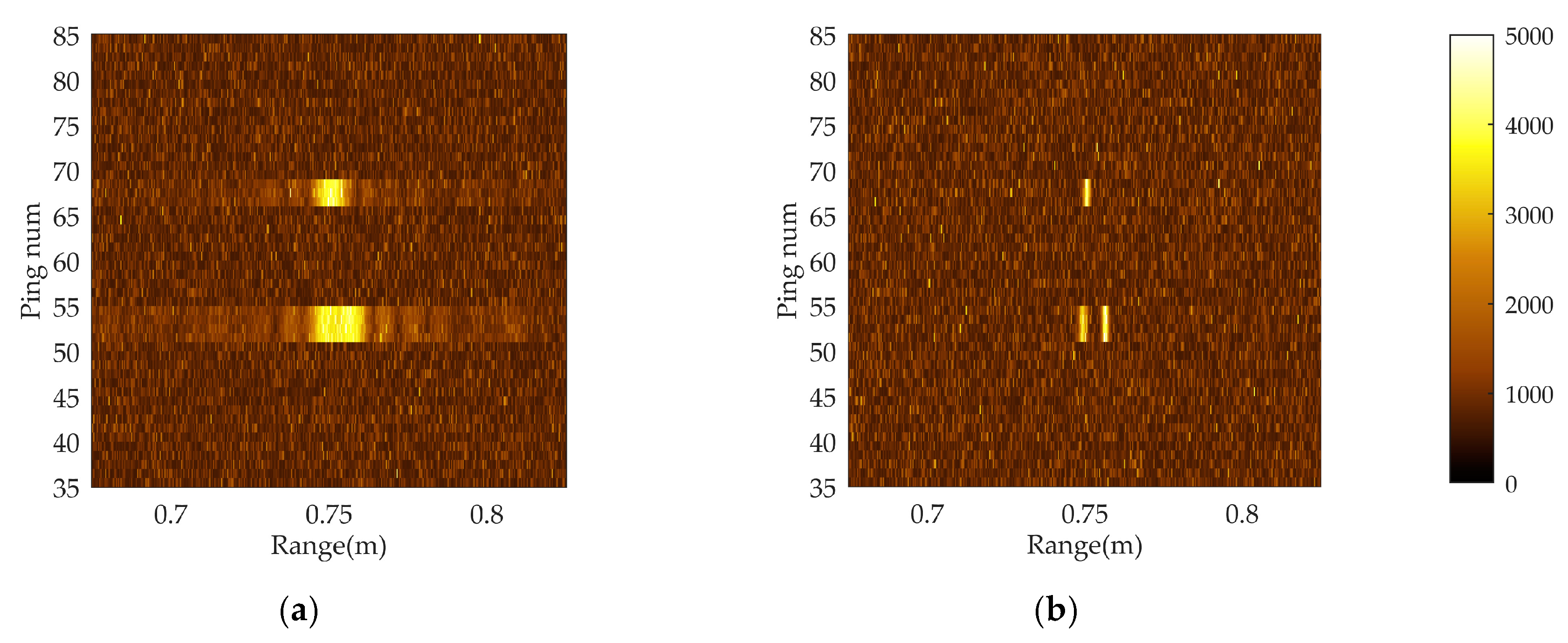
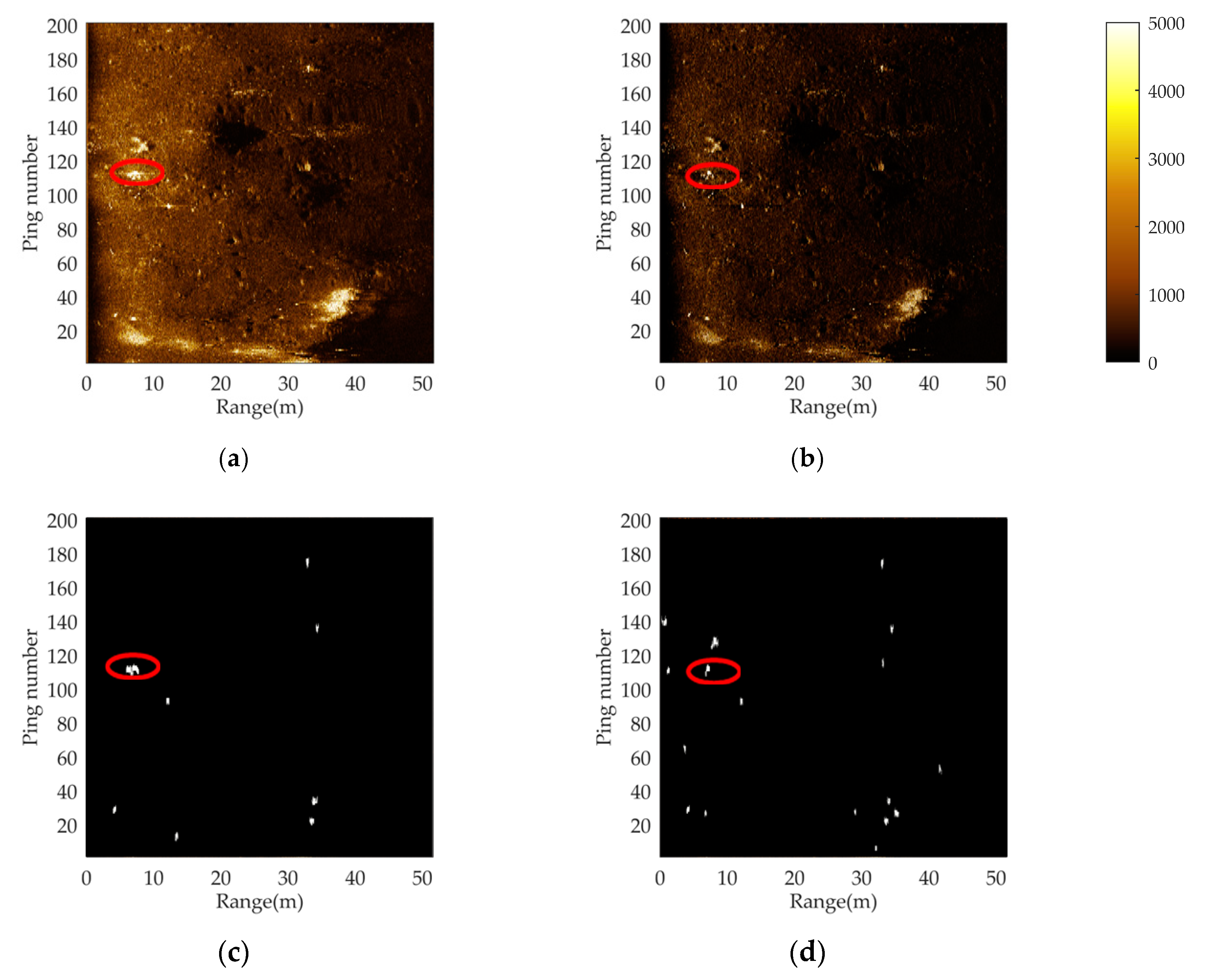
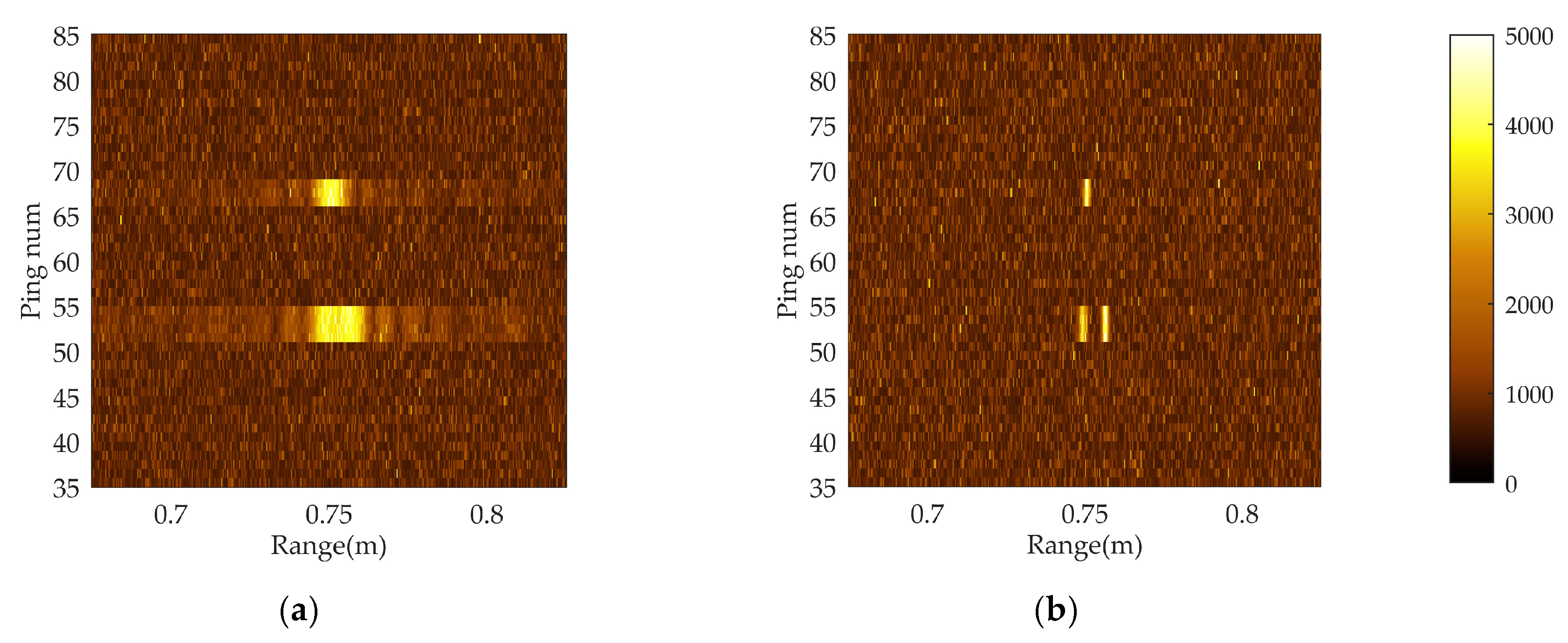
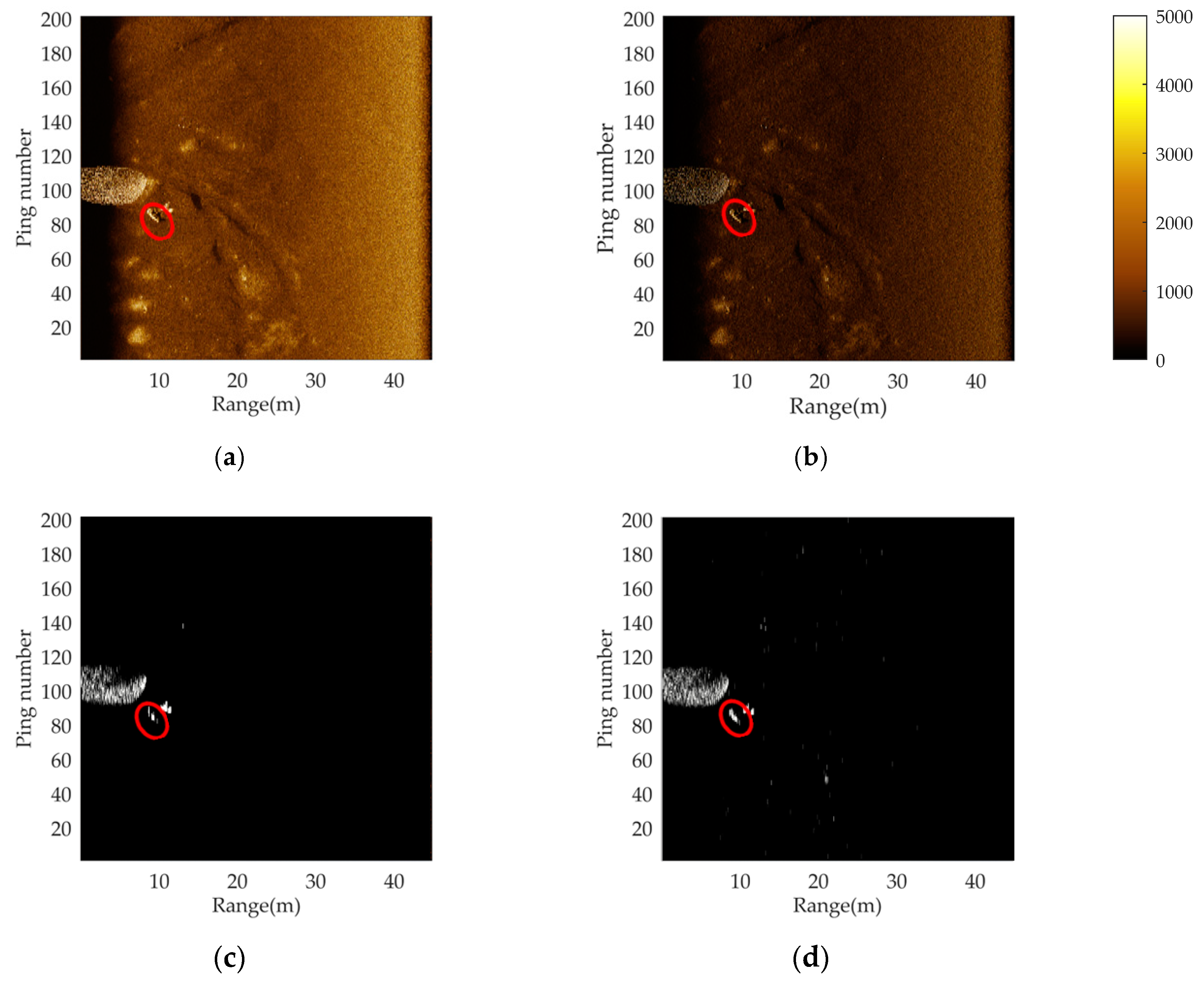
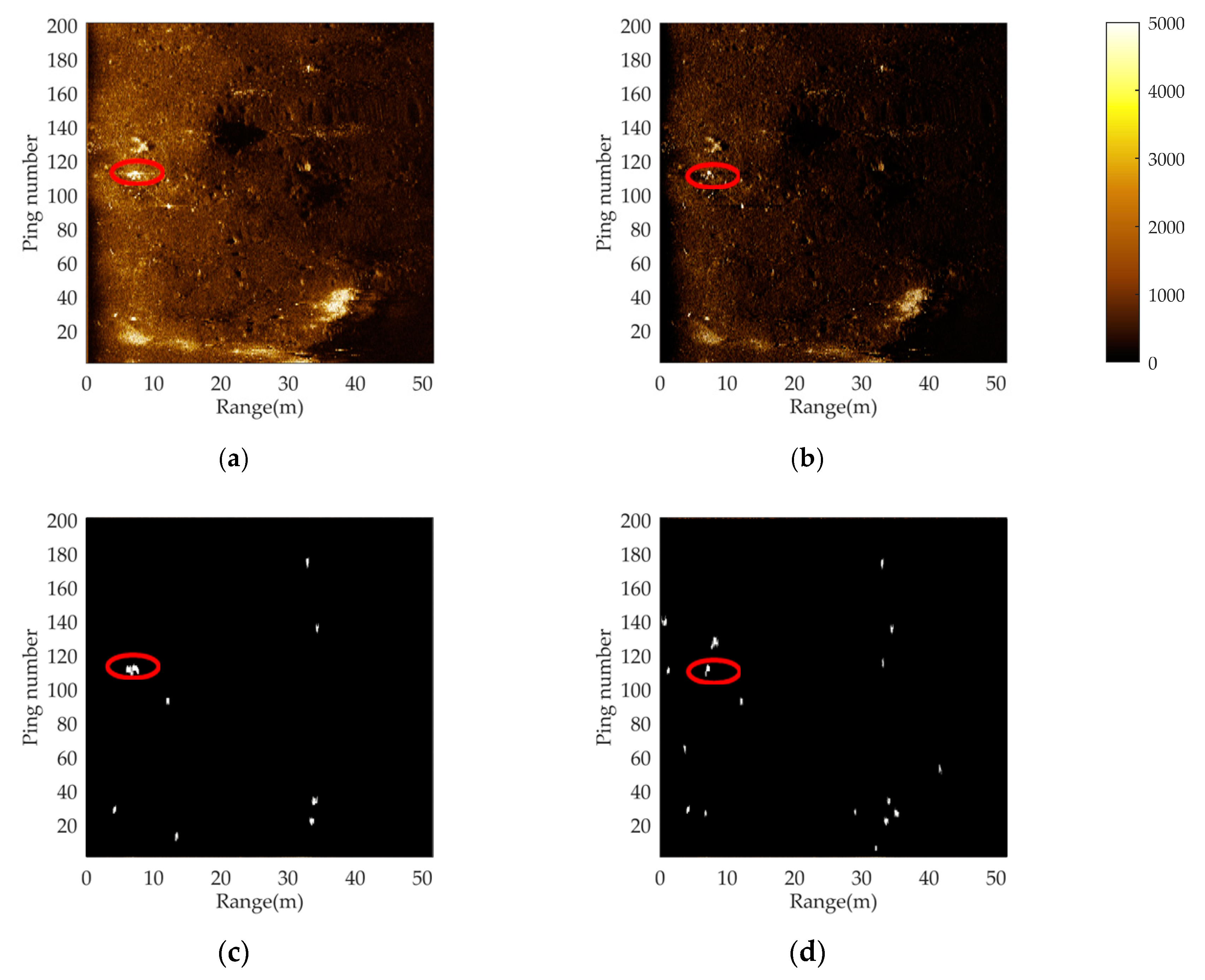
3.2.2. The Influence of the Algorithm on Target Imaging
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Nguyen, V.D.; Luu, N.M.; Nguyen, Q.K.; Nguyen, T.-D. Estimation of the Acoustic Transducer Beam Aperture by Using the Geometric Backscattering Model for Side-Scan Sonar Systems. Sensors 2023, 23, 2190. [Google Scholar] [CrossRef]
- Meng, X.; Xu, W.; Shen, B.; Guo, X. A High–Efficiency Side–Scan Sonar Simulator for High–Speed Seabed Mapping. Sensors 2023, 23, 3083. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, S.; Gross, L.; Zhang, C.; Wang, B. Fused Adaptive Receptive Field Mechanism and Dynamic Multiscale Dilated Convolution for Side-Scan Sonar Image Segmentation. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5116817. [Google Scholar] [CrossRef]
- Zhu, H.H.; Cui, Z.Q.; Liu, J.; Liu, X.; Wang, J.H. A Method for Inverting Shallow Sea Acoustic Parameters Based on the Backward Feedback Neural Network Model. J. Mar. Sci. Eng. 2023, 11, 1340. [Google Scholar] [CrossRef]
- Borrelli, M.; Smith, T.L.; Mague, S.T. Vessel-Based, Shallow Water Mapping with a Phase-Measuring Sidescan Sonar. Estuaries Coast. 2022, 45, 961–979. [Google Scholar] [CrossRef]
- Zheng, G.; Zhang, H.; Li, Y.; Zhao, J. A Universal Automatic Bottom Tracking Method of Side Scan Sonar Data Based on Semantic Segmentation. Remote Sens. 2021, 13, 1945. [Google Scholar] [CrossRef]
- Cheng, Z.; Huo, G.; Li, H. A Multi-Domain Collaborative Transfer Learning Method with Multi-Scale Repeated Attention Mechanism for Underwater Side-Scan Sonar Image Classification. Remote Sens. 2022, 14, 355. [Google Scholar] [CrossRef]
- Shang, X.; Zhao, J.; Zhang, H. Automatic Overlapping Area Determination and Segmentation for Multiple Side Scan Sonar Images Mosaic. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2021, 14, 2886–2900. [Google Scholar] [CrossRef]
- Brown, D.C.; Gerg, I.D.; Blanford, T.E. Interpolation Kernels for Synthetic Aperture Sonar Along-Track Motion Estimation. IEEE J. Ocean. Eng. 2020, 45, 1497–1505. [Google Scholar] [CrossRef]
- Tuladhar, S.R.; Buck, J.R. Unit Circle Rectification of the Minimum Variance Distortionless Response Beamformer. IEEE J. Ocean. Eng. 2020, 45, 500–510. [Google Scholar] [CrossRef]
- Wang, Q.L.; Zhu, H.H.; Chai, Z.G.; Cui, Z.Q.; Wang, Y.F. Analysis of VLF Wave Field Components and Characteristics Based on Finite Element Time-Domain Method. J. Sensors. 2023, 2023, 7702342. [Google Scholar] [CrossRef]
- Elbir, A.M. DeepMUSIC: Multiple Signal Classification via Deep Learning. IEEE Sens. Lett. 2020, 4, 7001004. [Google Scholar] [CrossRef]
- Yang, X.B.; Wang, K.; Zhou, P.Y.; Xu, L.; Liu, J.L.; Sun, P.P.; Su, Z.Q. Ameliorated-multiple signal classification (Am-MUSIC) for damage imaging using a sparse sensor network. Mech. Syst. Signal Process. 2022, 163, 108154. [Google Scholar] [CrossRef]
- Yin, J.W.; Guo, K.; Han, X.; Yu, G. Fractional Fourier transform based underwater multi-targets direction-of-arrival estimation using wideband linear chirps. Appl. Acoust. 2020, 169, 107477. [Google Scholar] [CrossRef]
- Thanh Le, H.; Phung, S.L.; Chapple, P.B.; Bouzerdoum, A.; Ritz, C.H.; Tran, L.C. Deep Gabor Neural Network for Automatic Detection of Mine-Like Objects in Sonar Imagery. IEEE Access. 2020, 8, 94126–94139. [Google Scholar] [CrossRef]
- Zhu, H.H.; Xue, Y.Y.; Ren, Q.Y.; Liu, X. Inversion of shallow seabed structure and geoacoustic parameters with waveguide characteristic impedance based on Bayesian approach. Front. Mar. Sci. 2023, 10, 1104570. [Google Scholar] [CrossRef]
- Yu, Y.C.; Zhao, J.H.; Gong, Q.H.; Huang, C.; Zheng, G.; Ma, J. Real-time underwater maritime object detection in side-scan sonar images based on transformer-YOLOv5. Remote Sens. 2021, 13, 3555. [Google Scholar] [CrossRef]
- Połap, D.; Wawrzyniak, N.; Włodarczyk-Sielicka, M. Side-scan sonar analysis using roi analysis and deep neural networks. IEEE Trans. Geosci. Remote Sens. 2022, 60, 4206108. [Google Scholar] [CrossRef]
- Sun, Y.; Liu, Q.; Cai, J.; Long, T. A Novel Weighted Mismatched Filter for Reducing. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 1450–1460. [Google Scholar] [CrossRef]
- Xia, D.; Zhang, L.; Wu, T.; Hu, W. An interference suppression algorithm for cognitive bistatic airborne radars. J. Syst. Eng. Electron. 2022, 33, 585–593. [Google Scholar] [CrossRef]
- Lønmo, T.I.B.; Austeng, A.; Hansen, R.E. Improving swath sonar water column imagery and bathymetry with adaptive beamforming. IEEE J. Ocean. Eng. 2020, 45, 1552–1563. [Google Scholar] [CrossRef]
- Guan, C.Y.; Zhou, Z.M.; Zeng, X.W. A phase-coded sequence design method for active sonar. Sensors 2020, 20, 4659. [Google Scholar] [CrossRef] [PubMed]
- Zhang, X.; Ying, W.; Dai, X. High-resolution imaging for the multireceiver SAS. J. Eng. Technol. 2019, 19, 6057–6062. [Google Scholar] [CrossRef]
- Zeng, X.; Liu, J.; Gao, B. Three-dimensional Imaging Sonar Signal Processing System Based on Blade Server. J. Phys. Conf. Ser. 2019, 1213, 042061. [Google Scholar] [CrossRef]
- Sun, D.; Ma, C.; Mei, J.; Shi, W. Improving the resolution of underwater acoustic image measurement by deconvolution. Appl. Acoust. 2020, 165, 107292. [Google Scholar] [CrossRef]
- Bai, C.; Liu, C.; Jia, H. Compressed blind deconvolution and denoising for complementary beam subtraction light-sheet fluorescence microscopy. IEEE. Trans. Biomed. Eng. 2019, 66, 2979–2989. [Google Scholar] [CrossRef]
- Xue, Y.Y.; Zhu, H.H.; Wang, X.H. Bayesian geoacoustic parameters inversion for multi-layer seabed in shallow sea using underwater acoustic field. Front. Mar. Sci. 2023, 10, 1058542. [Google Scholar] [CrossRef]
- Wang, P.; Chi, C.; Ji, Y.Q.; Huang, Y.; Huang, H.N. Two-dimensional deconvoled beamforming for the high-resolution underwater three-dimensional acoustical imaging. Acta Acust. 2019, 44, 613–625. [Google Scholar]
- Zhu, J.H.; Song, Y.P.; Jiang, N.; Xie, Z.; Fan, C.Y.; Huang, X.T. Enhanced Doppler Resolution and Sidelobe Suppression Per-formance for Golay Complementary Waveforms. Remote Sens. 2023, 15, 2452. [Google Scholar] [CrossRef]
- Zhang, X.B.; Yang, P.X.; Sun, H.X. An omega-k algorithm for multireceiver synthetic aperture sonar. Electron. Lett. 2023, 59, e12859. [Google Scholar] [CrossRef]
- Mei, J.D.; Shi, W.P.; Ma, C.; Sun, D.J. Near-field beamforming acoustic image measurement based on decovolution. Acta Acust. 2020, 45, 15–28. [Google Scholar]
- Teng, T.T.; Liu, H.M.; Sun, D.S.; Xi, J.C.; Qu, G.Y.; Yang, S. Active sonar de-convolution matched filtering method. In Proceedings of the 2018 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Qingdao, China, 14–16 September 2018. [Google Scholar]
- Shang, Z.G.; Qu, X.H.; Qiao, G.; Hao, C.P. Localizing mixed far- and near-field sources using beamforming deconvolution techniques. Acta Acust. 2023, 48, 447–458. [Google Scholar]
- Guo, W.; Piao, S.C.; Yang, T.C.; Guo, J.Y.; Iqbal, K. High-resolution power spectral estimation method using deconvolution. IEEE J. Ocean. Eng. 2020, 45, 489–499. [Google Scholar] [CrossRef]
- Yang, T.C. Deconvolved conventional beamforming for a horization line array. IEEE J. Ocean. Eng. 2018, 43, 160–172. [Google Scholar] [CrossRef]
- Sun, D.J.; Ma, C.; Yang, T.C.; Mei, J.D.; Shi, W.P. Improving the performance of a vector sensor line array by deconvolution. IEEE J. Ocean. Eng. 2020, 45, 1063–1077. [Google Scholar] [CrossRef]
- Liu, X.H.; Fan, J.H.; Sun, C.; Yang, Y.X.; Zhuo, J. High-resolution and low-sidelobe forward-look sonar imaging using deconvolution. Appl. Acoust. 2021, 178, 107986. [Google Scholar] [CrossRef]
- Liu, X.H.; Shi, R.W.; Sun, C.; Yang, Y.X.; Zhuo, J. Using deconvolution to suppress range sidelobes for MIMO sonar imaging. Appl. Acoust. 2022, 186, 108491. [Google Scholar] [CrossRef]
- Richardson, W.H. Bayesian-based iterative method of image restoration. J. Opt. Soc. Am. 1972, 62, 55–59. [Google Scholar] [CrossRef]
- Lucy, L.B. An iterative technique for the rectification of observed distributions. Astron. J. 1974, 79, 745–754. [Google Scholar] [CrossRef]
- Fish, D.A.; Brinicomde, A.M.; Pike, E.R. Blind deconvolution by means of the Richards-Lucy algorithm. J. Opt. Soc. Am. 1995, 12, 58–65. [Google Scholar] [CrossRef]
- Yang, L.; Yang, Y.; Hasna, M.O. Coverage, probability of SNR gain, and DOR analysis of RIS-aided communication systems. IEEE Wireless Commun. Lett. 2020, 9, 1268–1272. [Google Scholar] [CrossRef]
- Wang, X.Y.; Wang, L.Y.; Li, G.L.; Xie, X. A robust and fast method for sidescan sonar image segmentation based on region growing. Sensors 2021, 21, 6960. [Google Scholar] [CrossRef] [PubMed]
- Li, J.; Jiang, P.; Zhu, H. A local region-based level set method with Markov random field for side-scan sonar image multi-level segmentation. IEEE Sens. J. 2020, 21, 510–519. [Google Scholar] [CrossRef]
- Wang, H.; Gao, N.; Xiao, Y. Image feature extraction based on improved FCN for UUV side-scan sonar. Mar. Geophys. Res. 2020, 41, 18. [Google Scholar] [CrossRef]
- Wang, Z.; Guo, J.; Huang, W. Side-scan sonar image segmentation based on multi-channel fusion convolution neural networks. IEEE Sens. J. 2022, 22, 5911–5928. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| SNR | Method | Main Lobe Width | MSLR |
|---|---|---|---|
| 10 dB | Traditional pulse pressure | 3 mm | −14 dB |
| Deconvolutional pulse pressure | 0.4 mm | −40 dB | |
| 5 dB | Traditional pulse pressure | 3 mm | −14 dB |
| Deconvolutional pulse pressure | 0.4 mm | −40 dB | |
| 3 dB | Traditional pulse pressure | 3 mm | −14 dB |
| Deconvolutional pulse pressure | 0.4 mm | −40 dB | |
| 0 dB | Traditional pulse pressure | 3 mm | −14 dB |
| Deconvolutional pulse pressure | 0.4 mm | −36 dB | |
| −3 dB | Traditional pulse pressure | 3 mm | −14 dB |
| Deconvolutional pulse pressure | 0.5 mm | −30 dB | |
| −5 dB | Traditional pulse pressure | 3 mm | −14 dB |
| Deconvolutional pulse pressure | 0.5 mm | −28 dB | |
| −10 dB | Traditional pulse pressure | 3 mm | −14 dB |
| Deconvolutional pulse pressure | 0.5 mm | −24 dB |
| Method | SNR | CR | CSR |
|---|---|---|---|
| Conventional Pulse Compression | 18.7 | 1.6 | 4.8 |
| Proposed Method | 24.7 | 1.88 | 25.8 |
| Ratio of Improvement | 32% | 12.5% | 437% |
| Method | MSE | PSNR | SSIM |
|---|---|---|---|
| Common Sharpening Method | 3.34 | 12.83 | 0.59 |
| Proposed Method | 1.52 | 16.30 | 0.79 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, J.; Pang, Y.; Yan, L.; Zhu, H. An Image Quality Improvement Method in Side-Scan Sonar Based on Deconvolution. Remote Sens. 2023, 15, 4908. https://doi.org/10.3390/rs15204908
Liu J, Pang Y, Yan L, Zhu H. An Image Quality Improvement Method in Side-Scan Sonar Based on Deconvolution. Remote Sensing. 2023; 15(20):4908. https://doi.org/10.3390/rs15204908
Chicago/Turabian StyleLiu, Jia, Yan Pang, Lengleng Yan, and Hanhao Zhu. 2023. "An Image Quality Improvement Method in Side-Scan Sonar Based on Deconvolution" Remote Sensing 15, no. 20: 4908. https://doi.org/10.3390/rs15204908
APA StyleLiu, J., Pang, Y., Yan, L., & Zhu, H. (2023). An Image Quality Improvement Method in Side-Scan Sonar Based on Deconvolution. Remote Sensing, 15(20), 4908. https://doi.org/10.3390/rs15204908