



A Space–Time–Range Joint Adaptive Focusing and Detection Method for Multiple Input Multiple Output Radar
Abstract
:1. Introduction
- (1)
- The technique effectively improves the matching mismatch problem caused by Doppler frequency shift;
- (2)
- The technique has good clutter- and noise-suppression effects;
- (3)
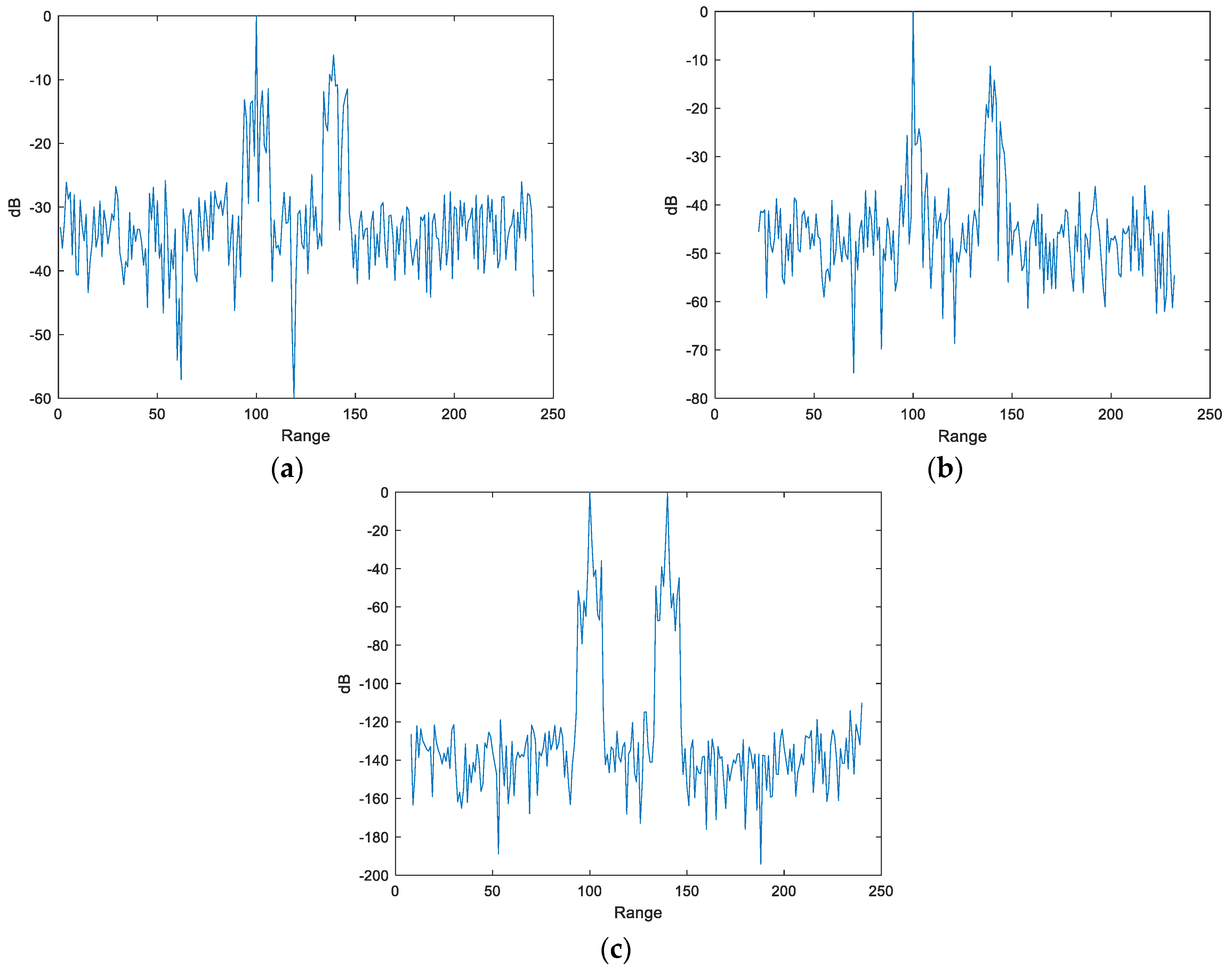
- The technique has good sidelobe-suppression effects (range sidelobes, Doppler sidelobes, and angle sidelobes);
- (4)
- The technique is capable of efficiently segregating waveforms;
- (5)
- The technique is not affected by coherent source cancellation;
- (6)
- The technique necessitates a minimal amount of data.
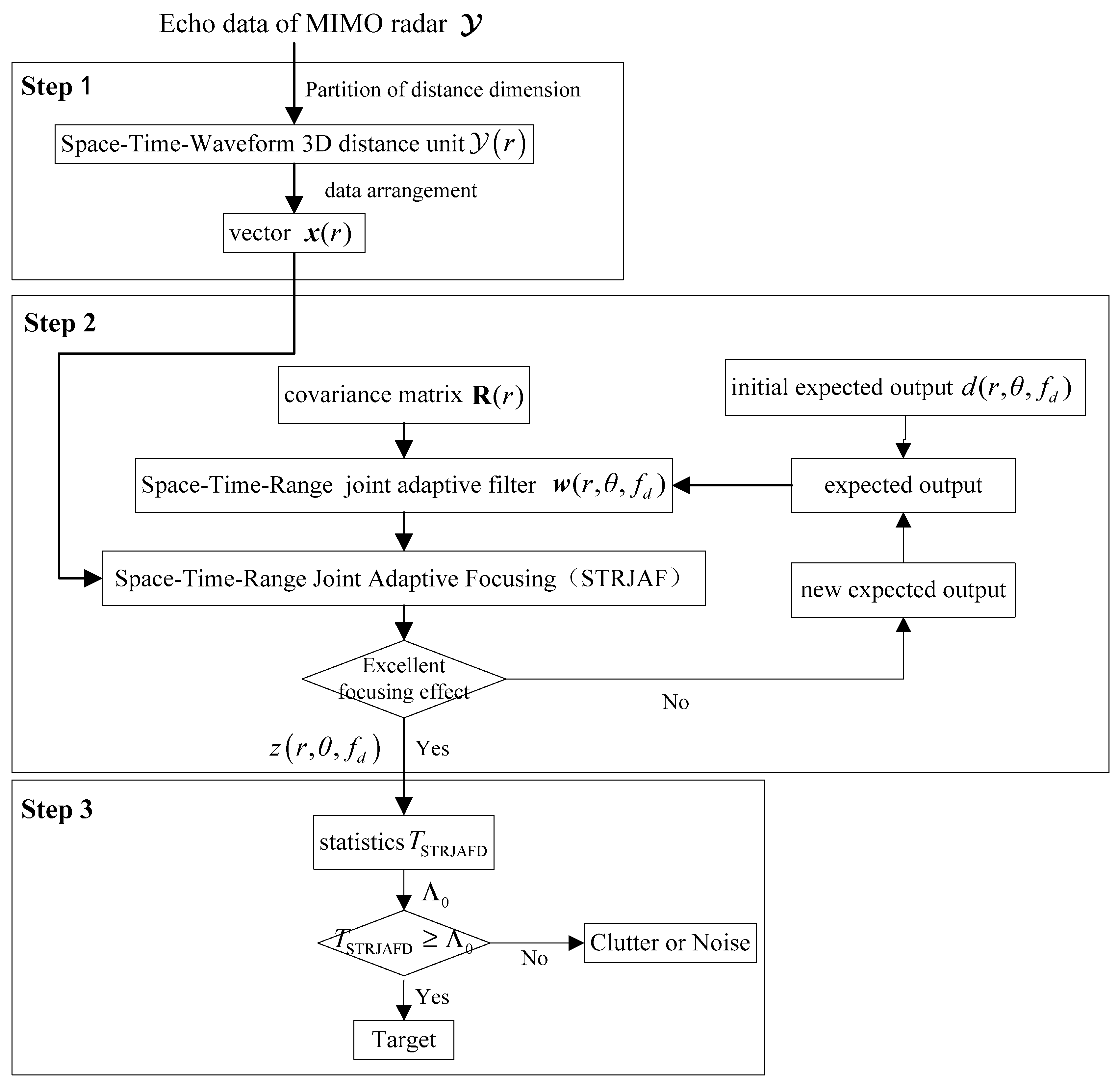
2. Space–Time–Range Joint Adaptive Focusing and Detection Method
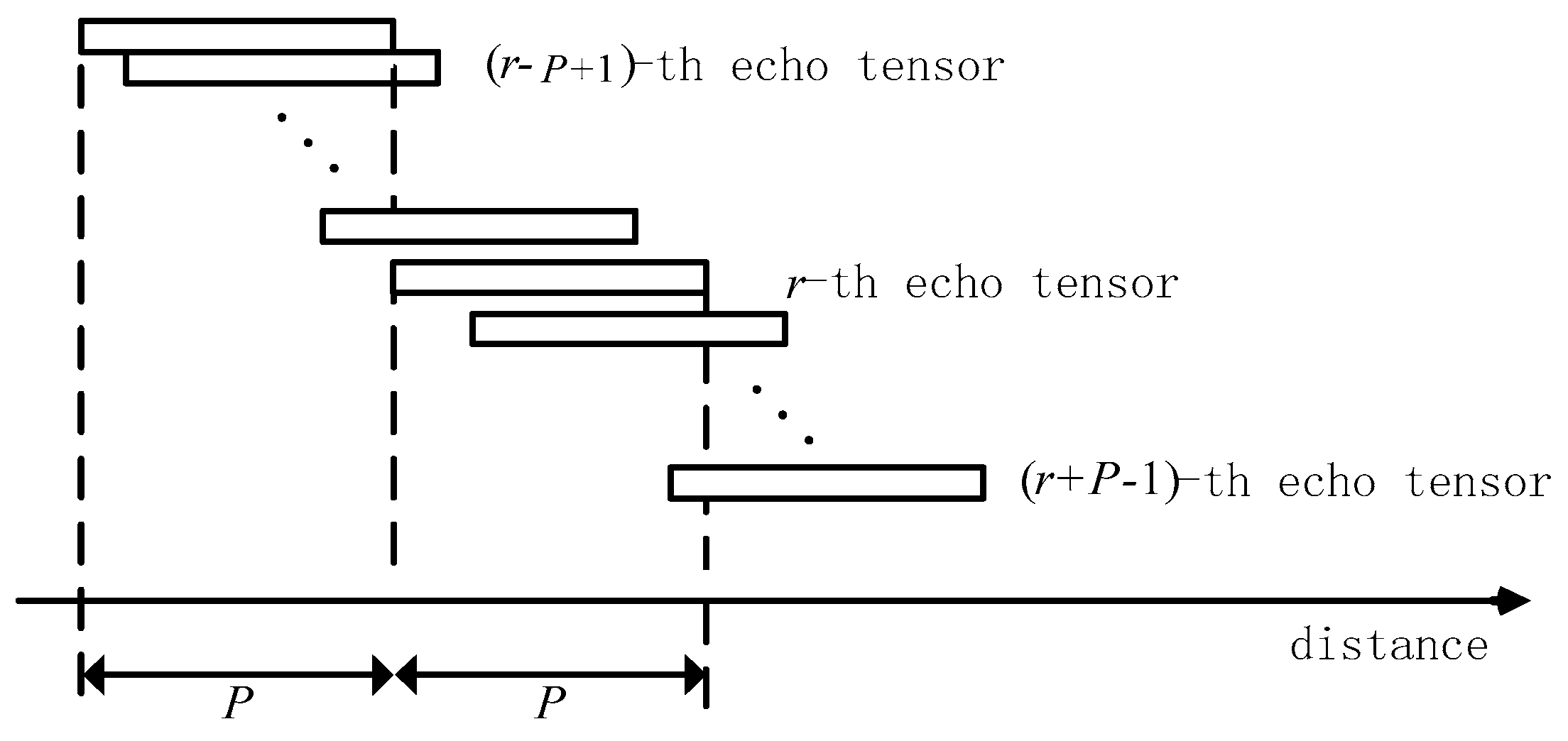
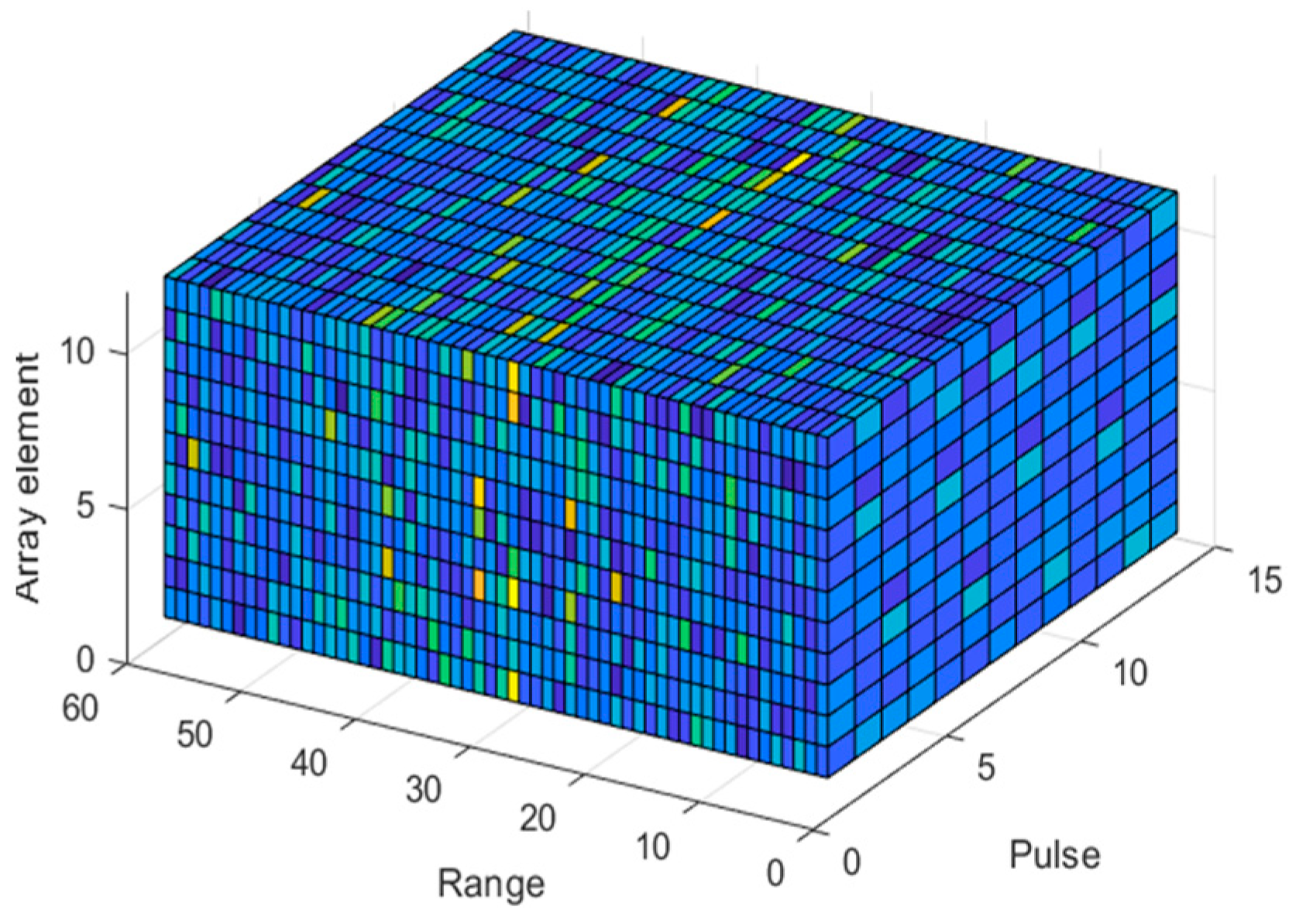
2.1. Space–Time–Range Model of MIMO Radar Echo Signal
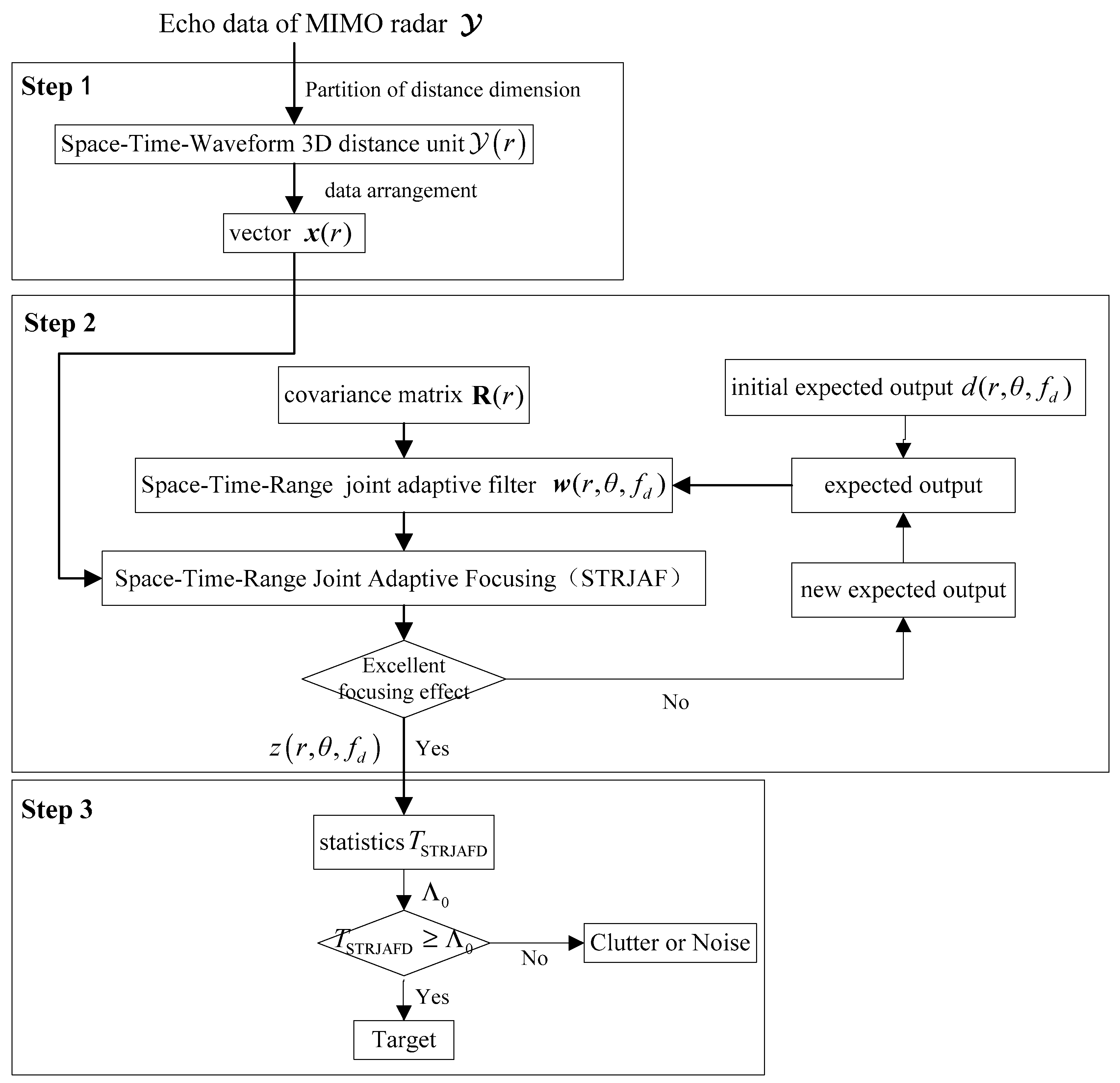
2.2. The Principle of Space–Time–Range Joint Adaptive Focusing and Detection Algorithm
3. Results
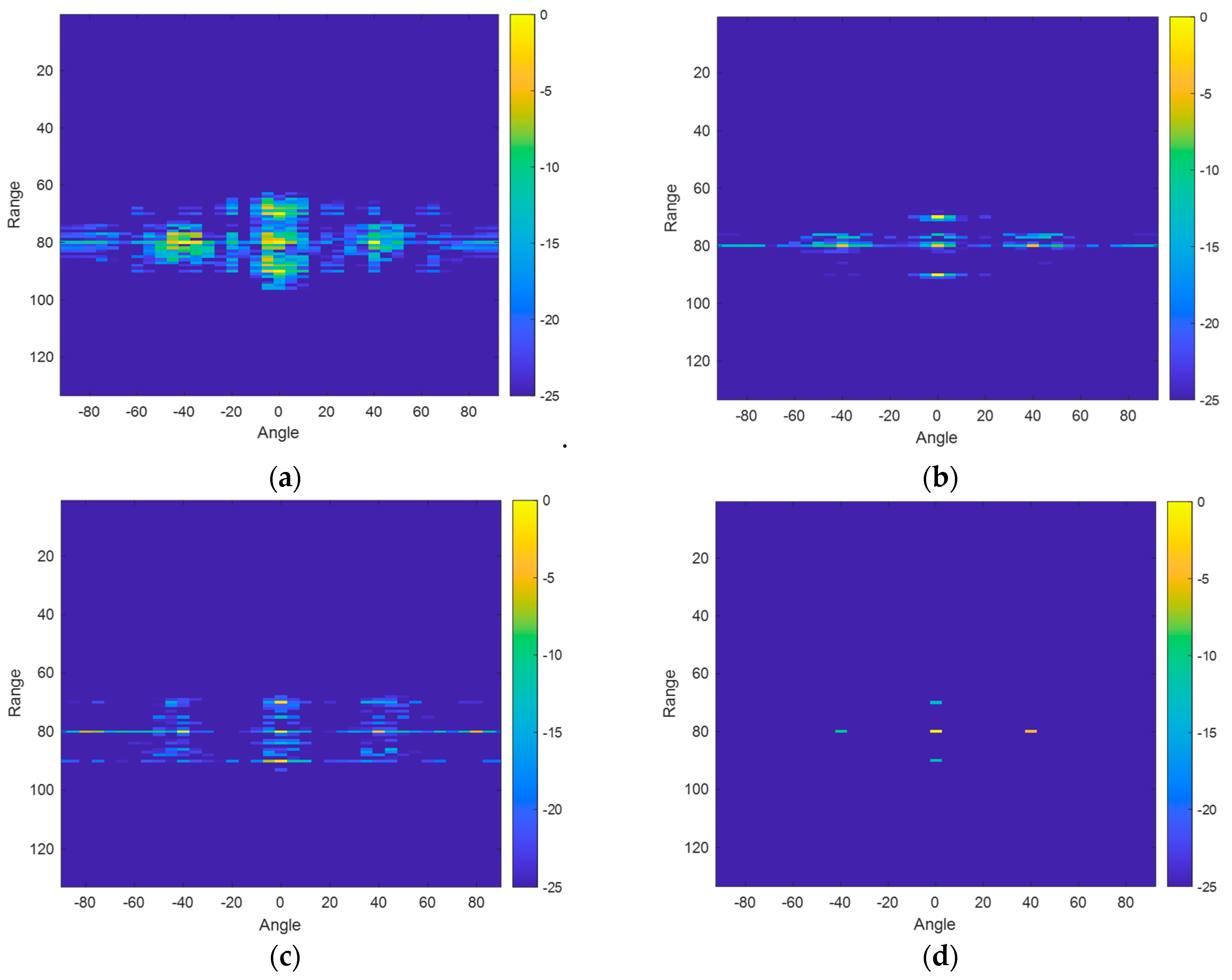
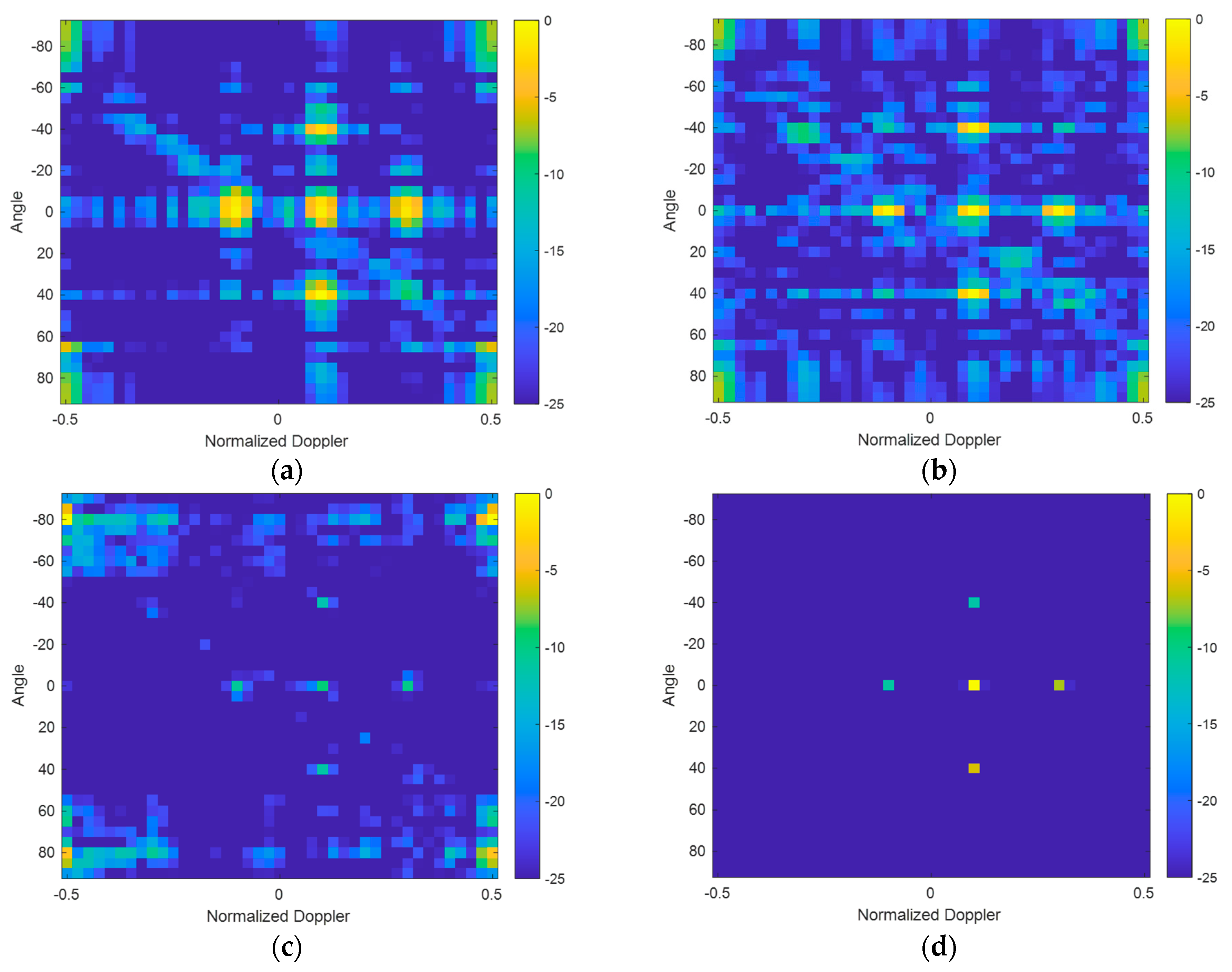
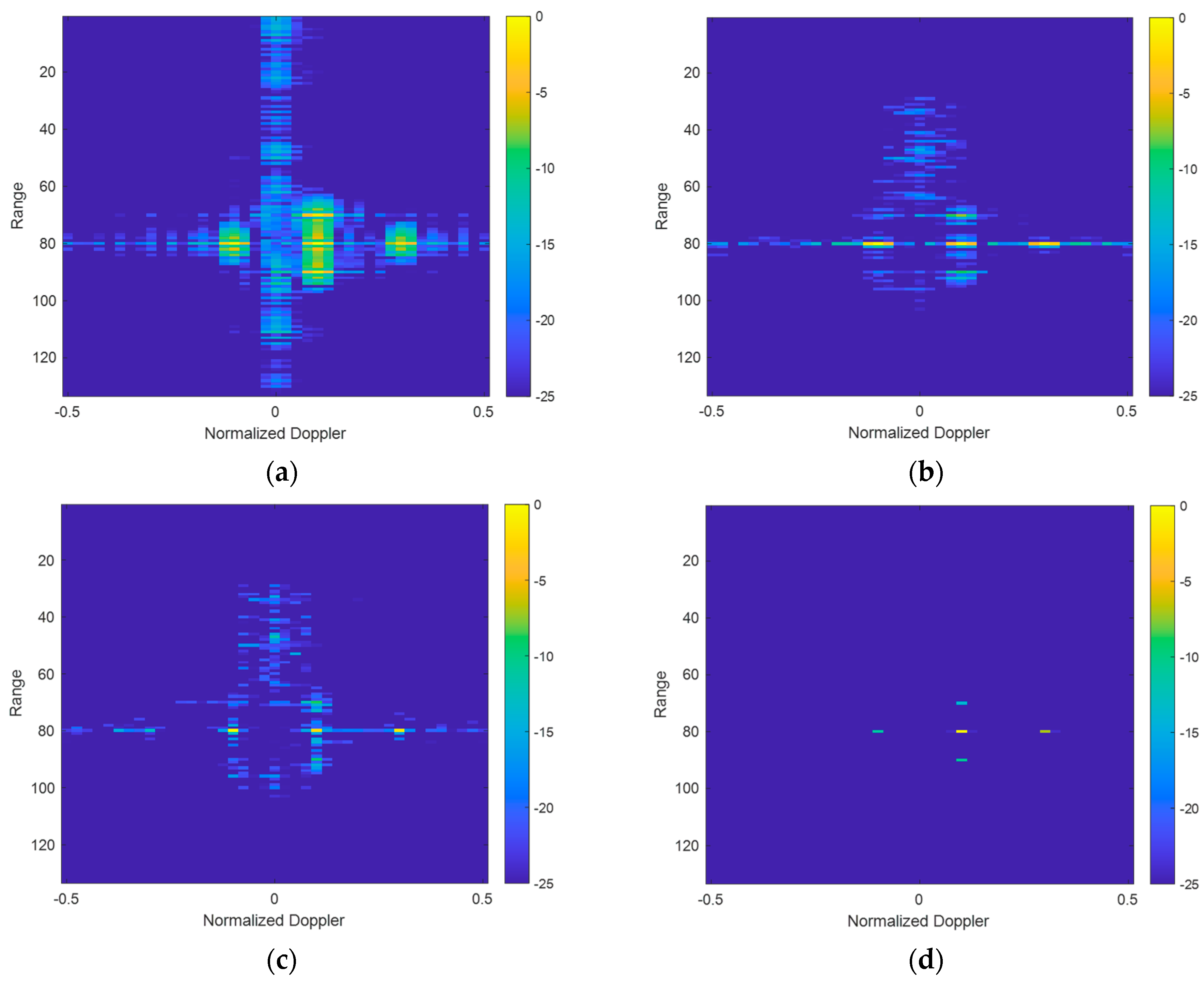
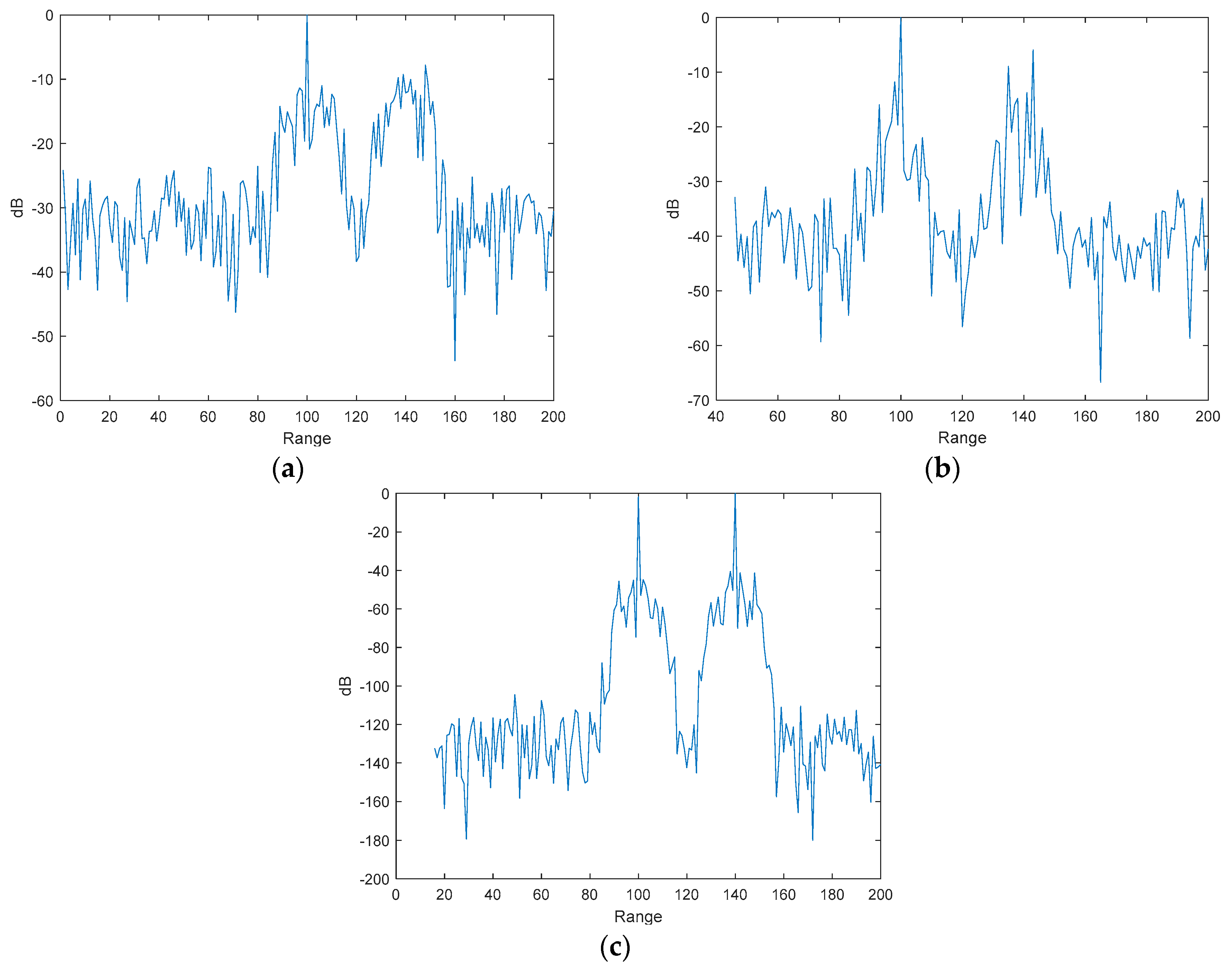
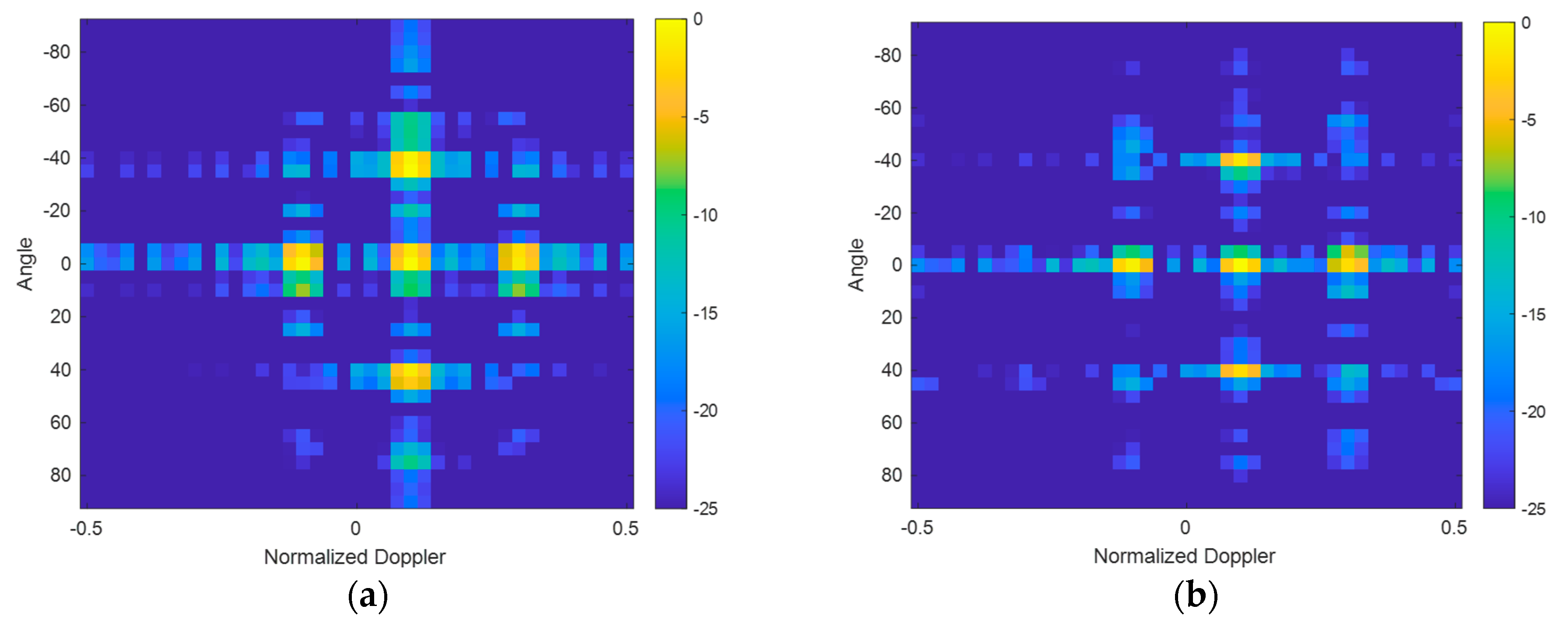
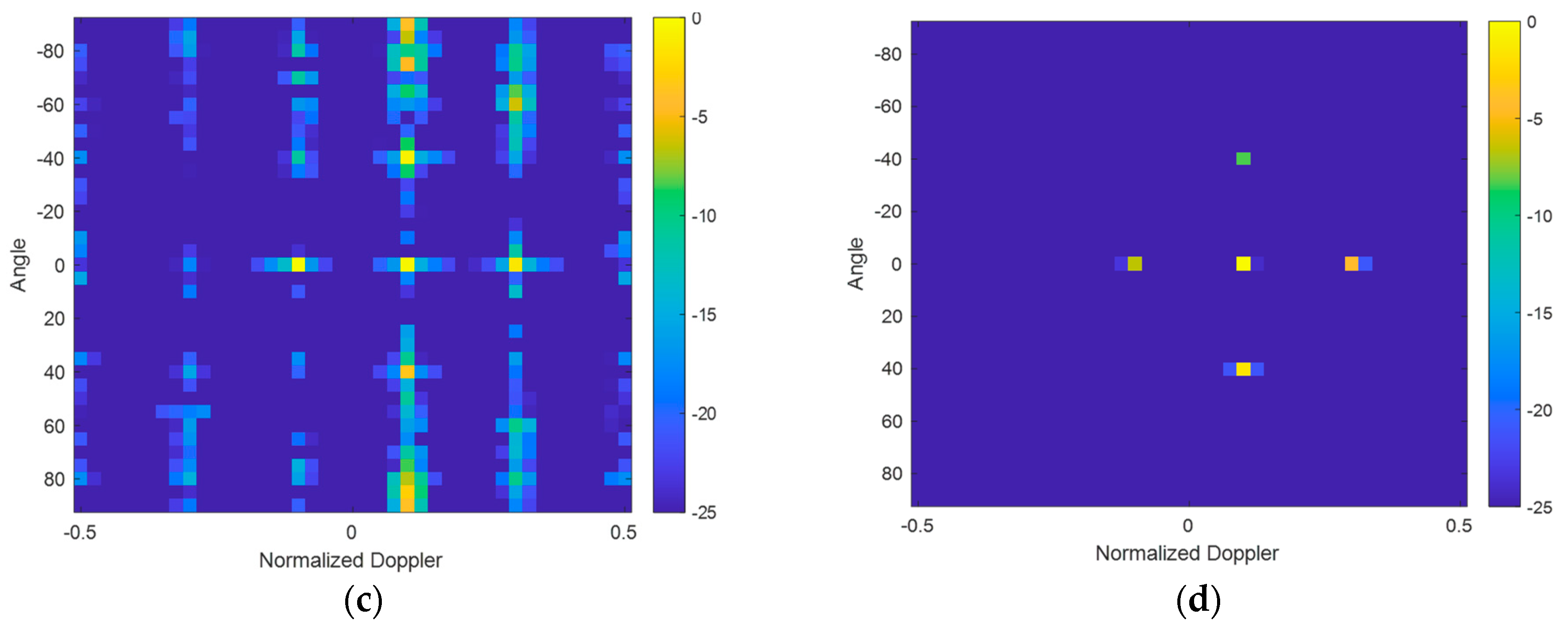
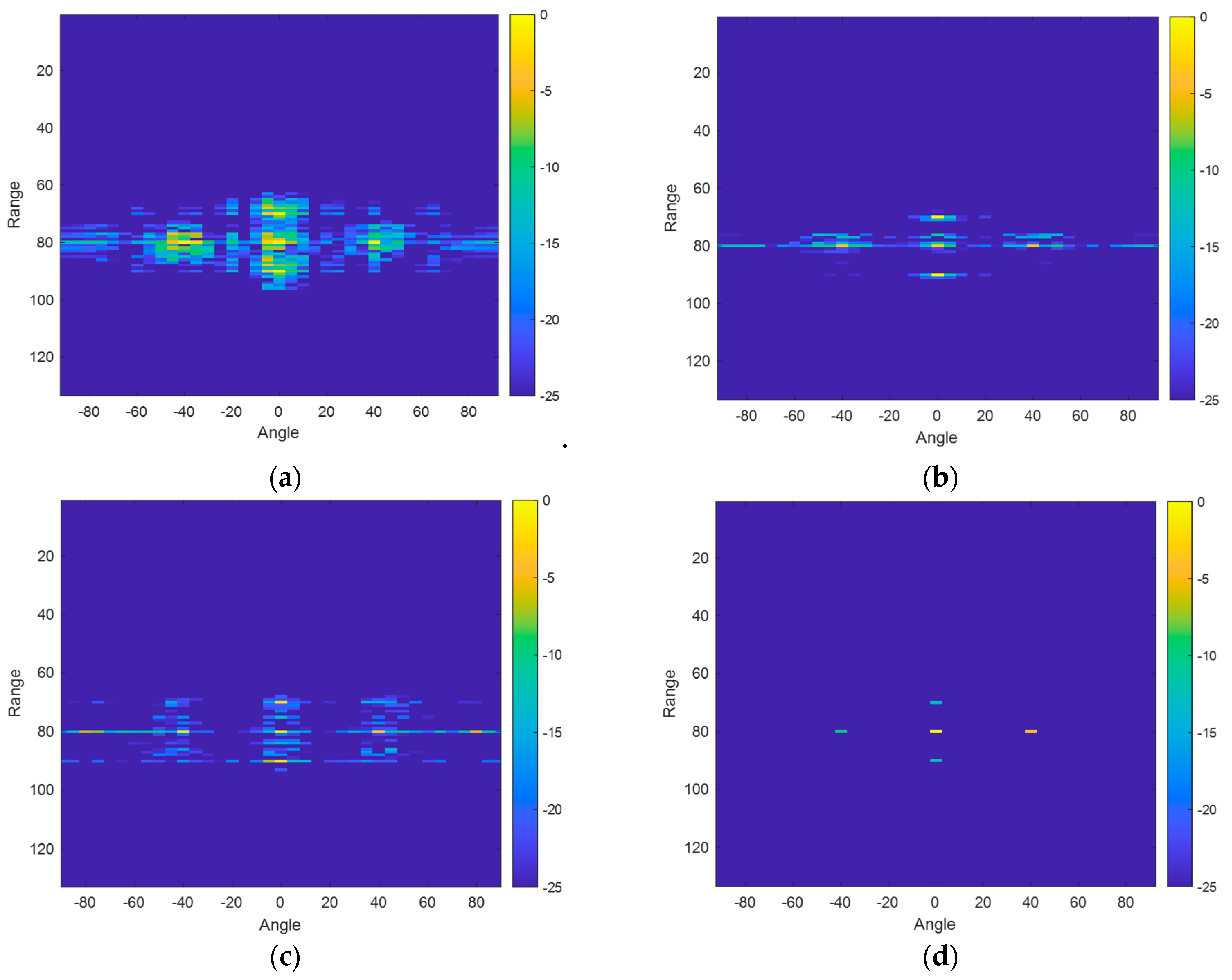
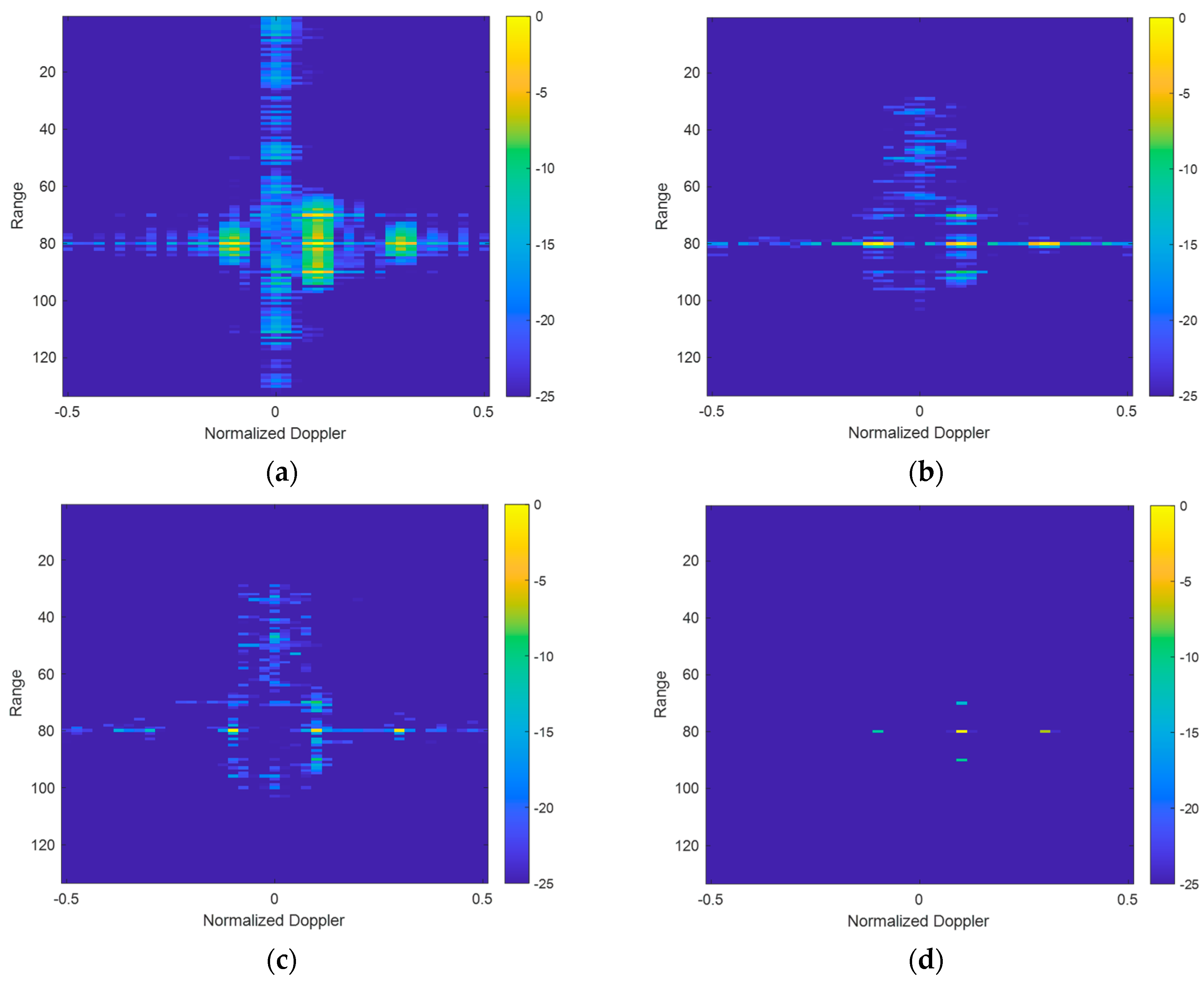
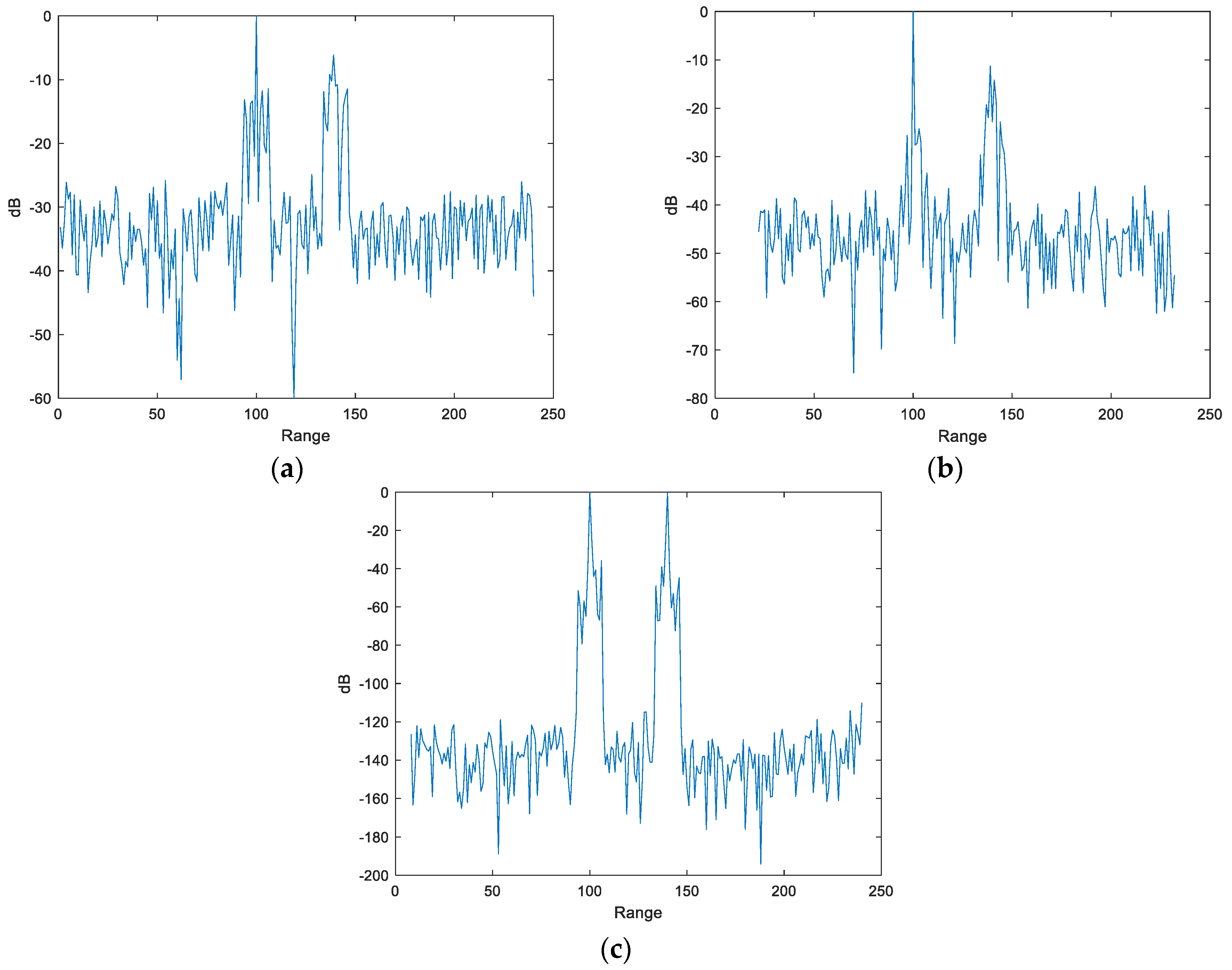
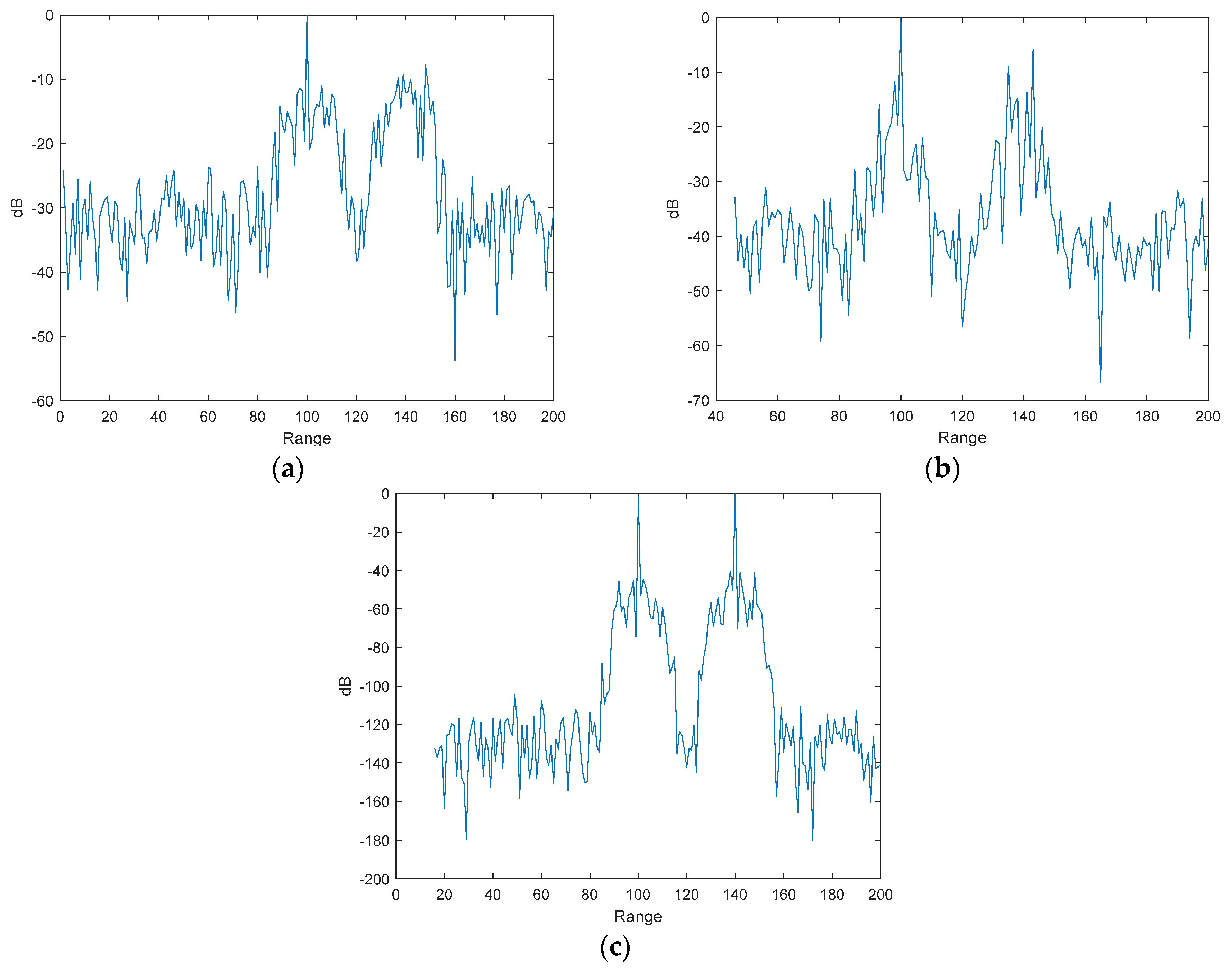
3.1. Focusing Results with Cluttered and Noisy Backgrounds
3.1.1. Focusing Results with Noisy Background
3.1.2. Focusing Results with Cluttered Background
3.2. The Influence of Intra-Pulse Doppler Frequency Shift
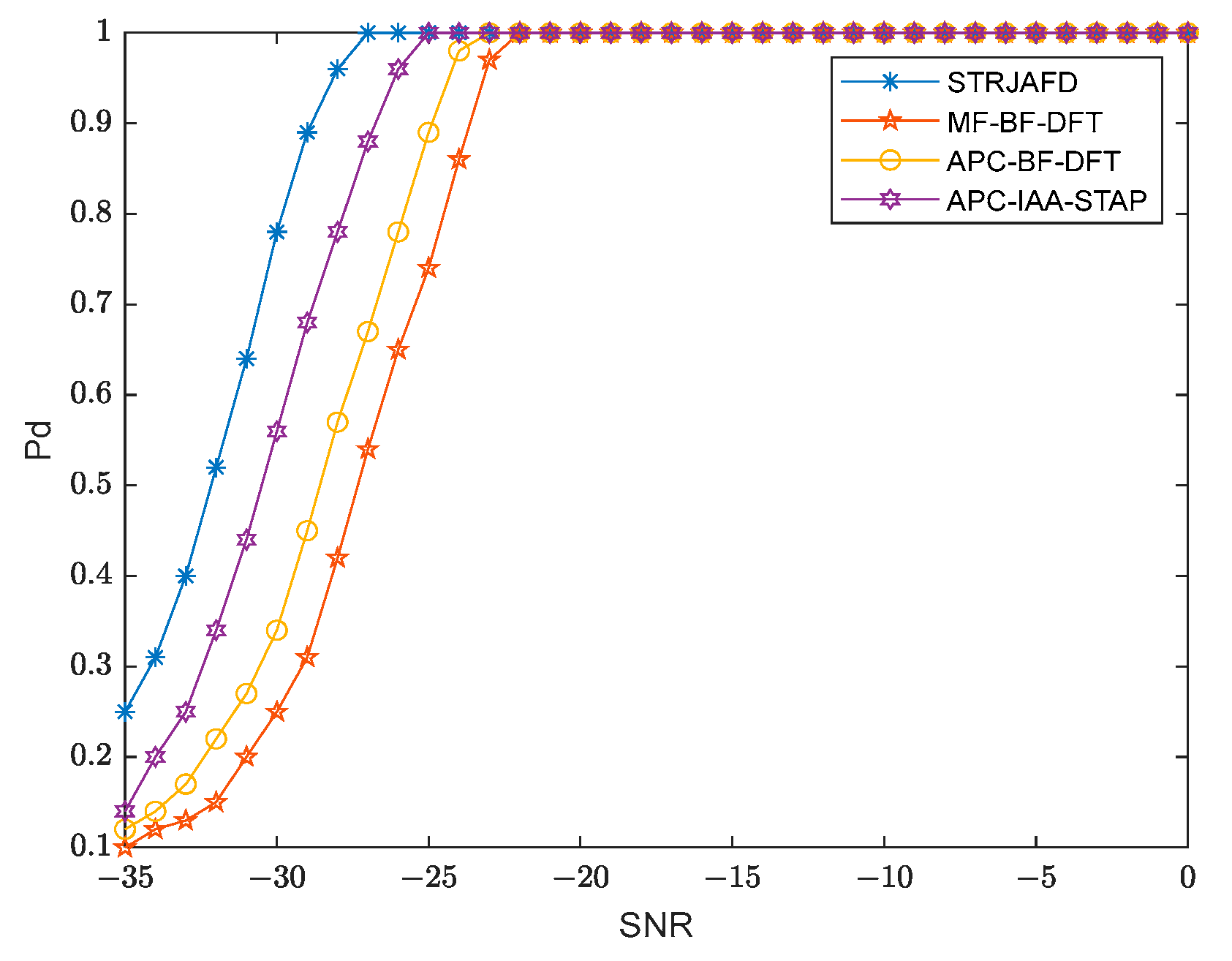
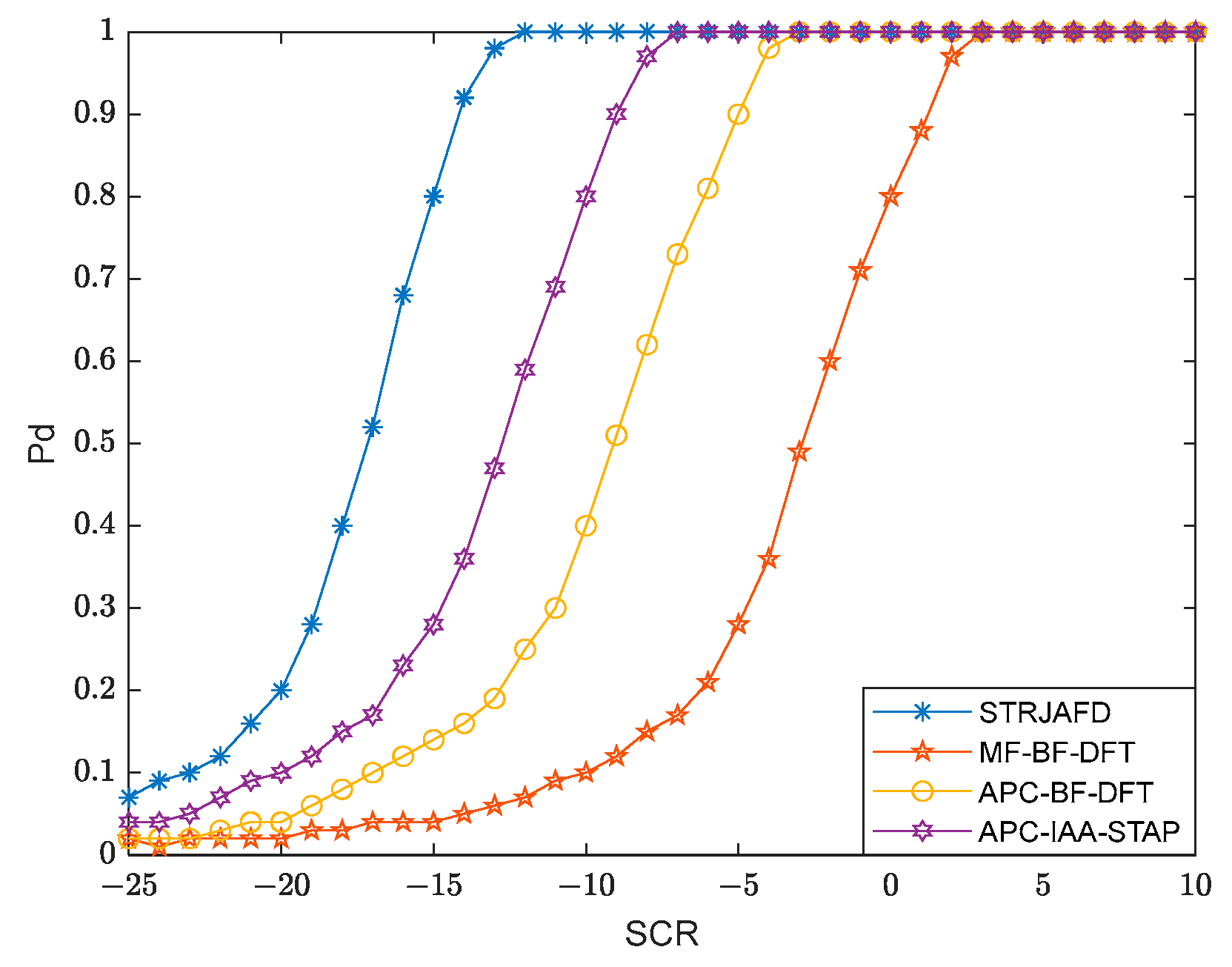
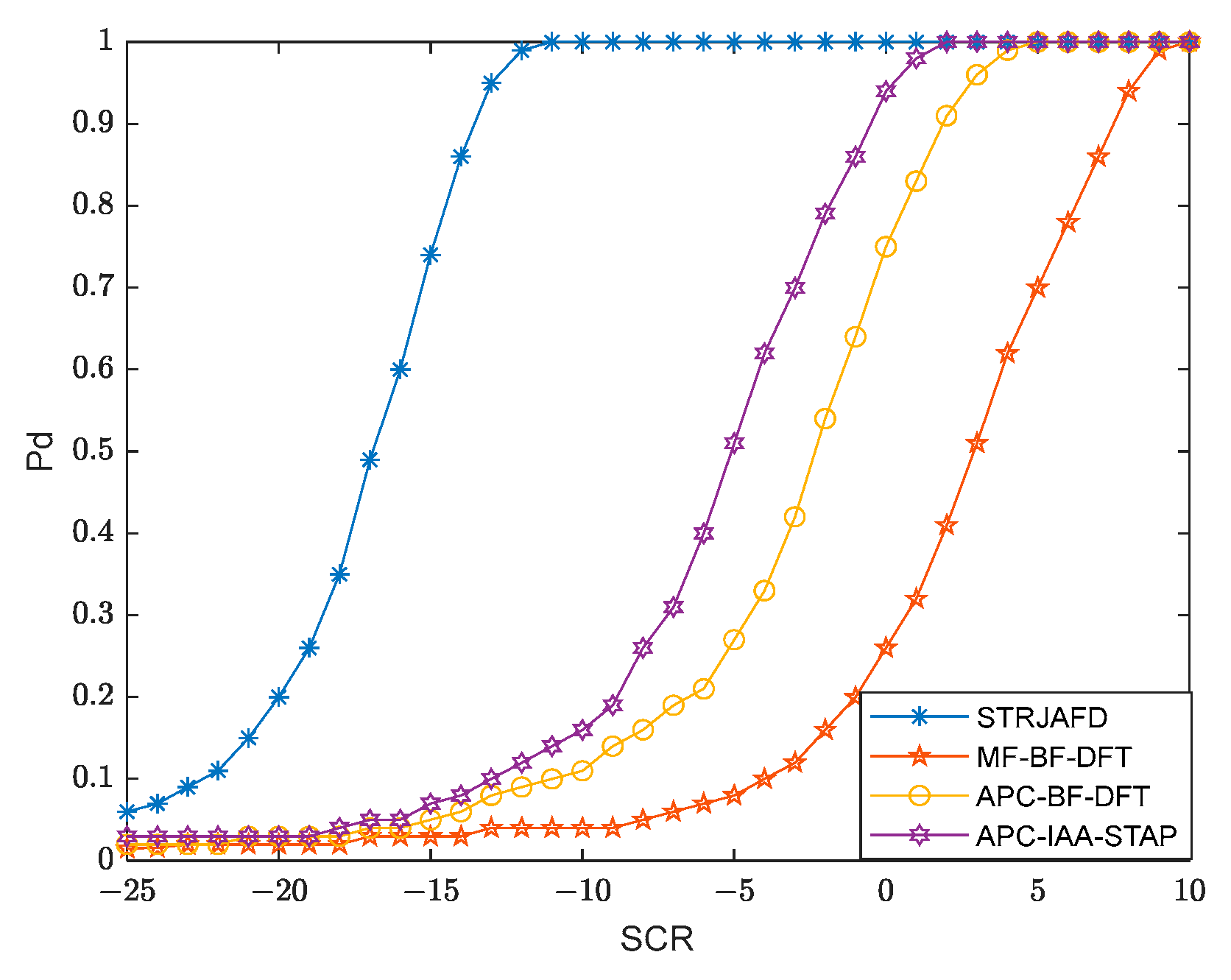
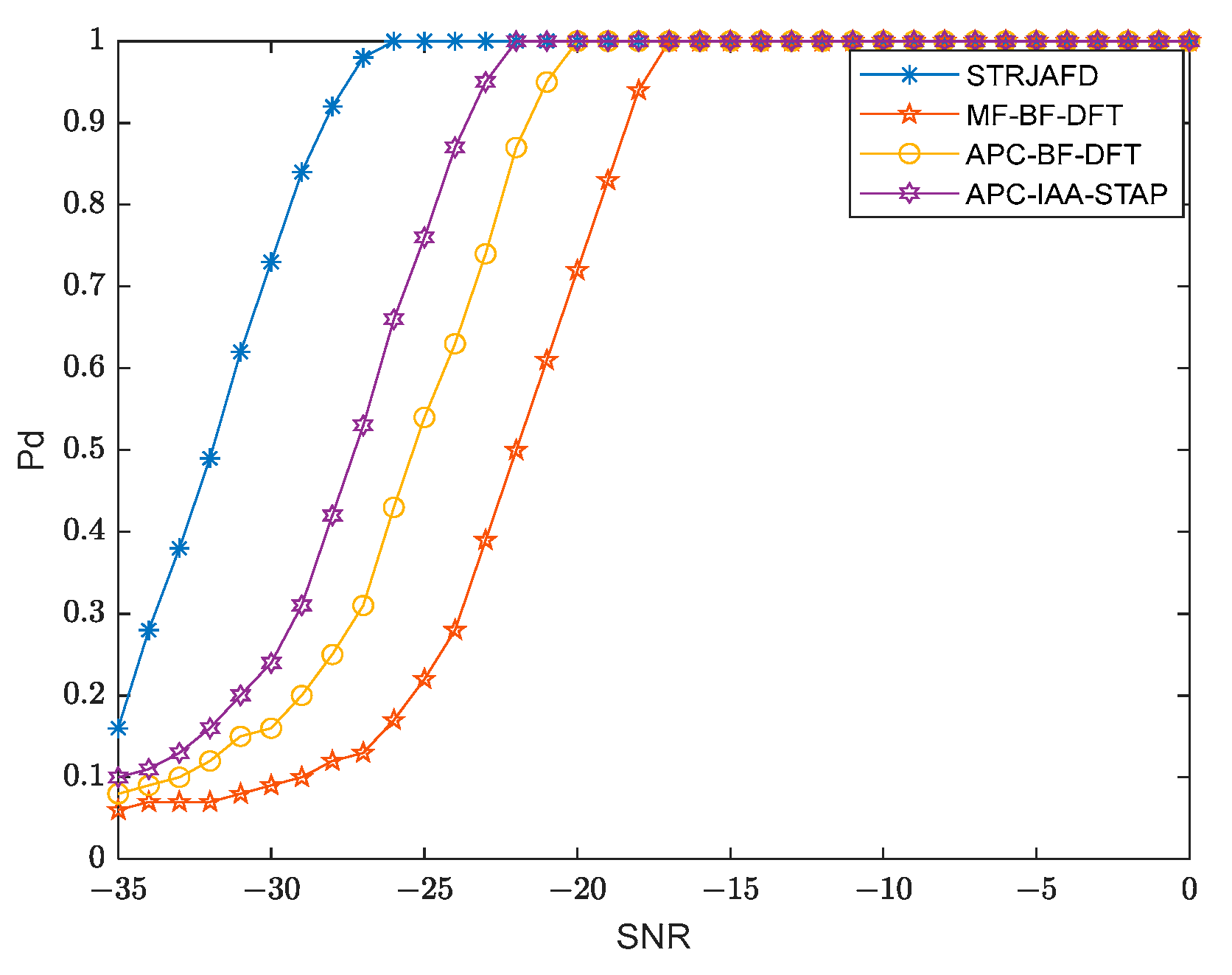
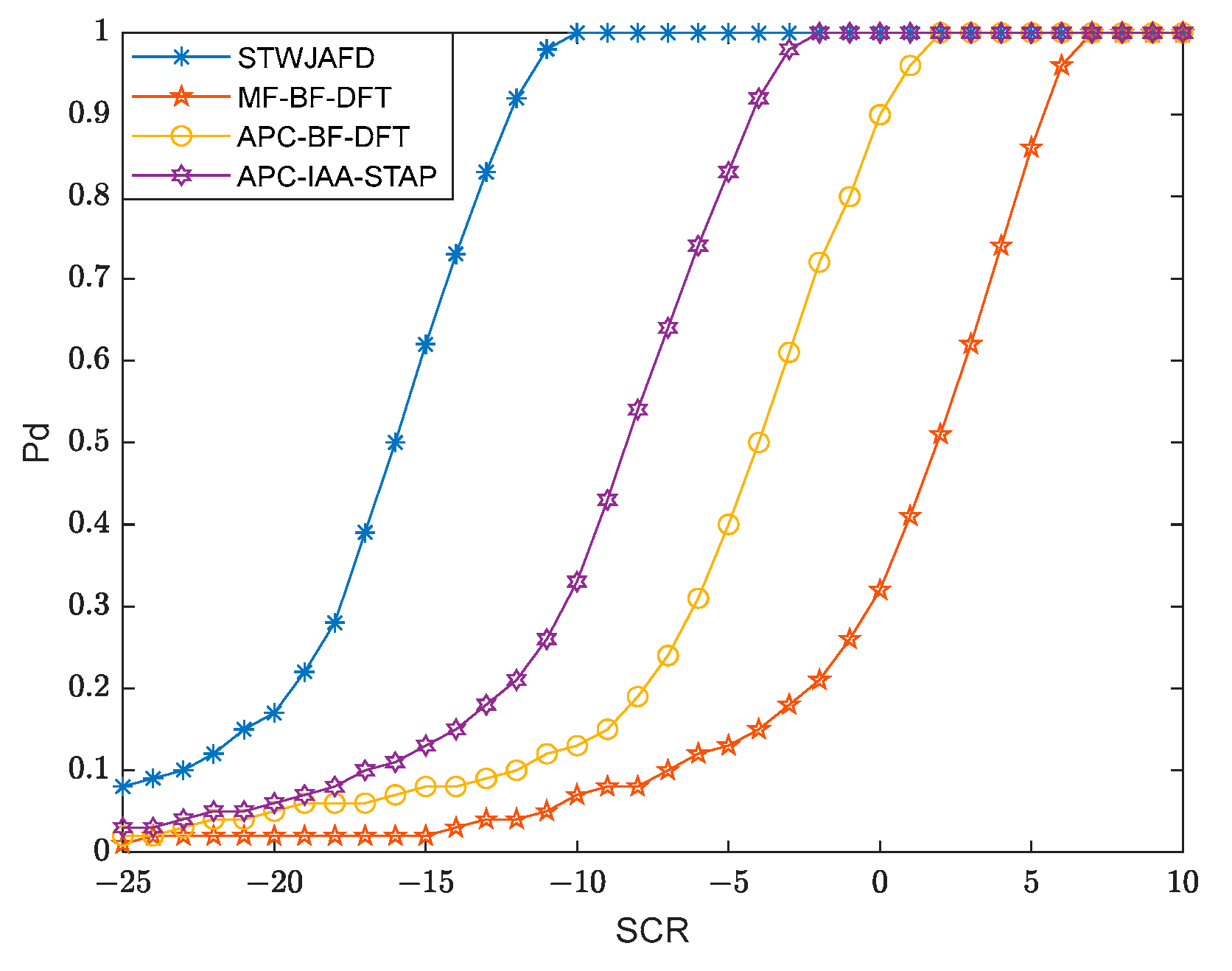
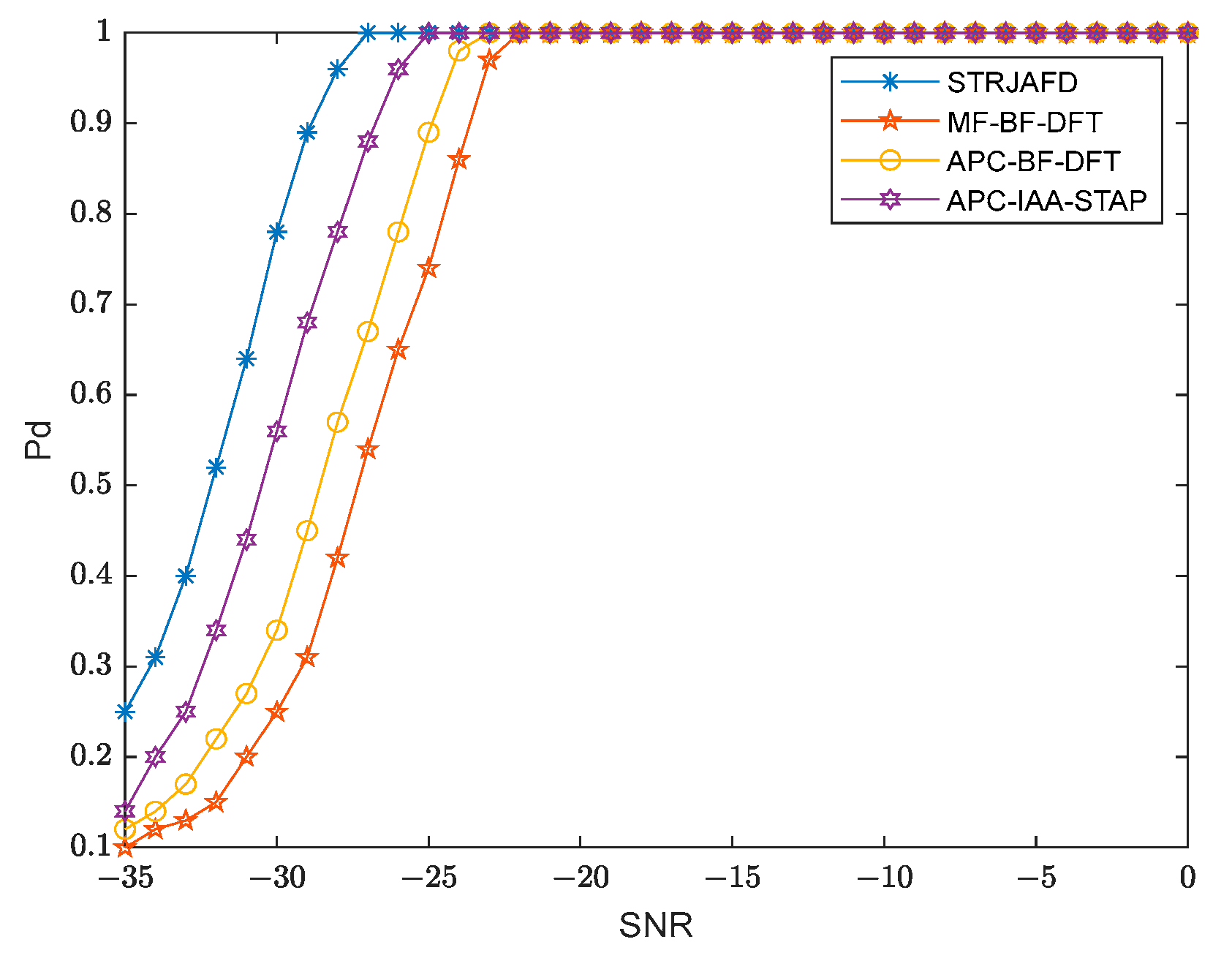
3.3. Detection Results with Noisy and Cluttered Backgrounds
3.3.1. The Effect of Intra-Pulse Doppler Frequency Shift on Detection Performance
3.3.2. The impact of Interference Targets on Detection Performance
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lin, B.; Yang, X.; Wang, J.; Wang, Y.; Wang, K.; Zhang, X. A Robust Space Target Detection Algorithm Based on Target Characteristics. IEEE Geosci. Remote Sens. Lett. 2022, 19, 8012405. [Google Scholar] [CrossRef]
- Ye, S.; He, Q.; Wang, X. MIMO Radar Moving Target Detection in Clutter Using Supervised Learning. In Proceedings of the 2021 IEEE Radar Conference (RadarConf21), Atlanta, GA, USA, 7–14 May 2021; pp. 1–5. [Google Scholar]
- Chen, X.; Chen, B.; Guan, J.; Huang, Y.; He, Y. Space-Range-Doppler Focus-Based Low-observable Moving Target Detection Using Frequency Diverse Array MIMO Radar. IEEE Access 2018, 6, 43892–43904. [Google Scholar] [CrossRef]
- Li, J.; Stoica, P. MIMO Radar with Colocated Antennas. IEEE Signal Process. Mag. 2007, 24, 106–114. [Google Scholar] [CrossRef]
- Fishler, E.; Haimovich, A.; Blum, R.; Chizhik, D.; Cimini, L.; Valenzuela, R. MIMO radar: An idea whose time has come. In Proceedings of the 2004 IEEE Radar Conference (IEEE Cat. No. 04CH37509), Philadelphia, PA, USA, 29 April 2004; pp. 71–78. [Google Scholar]
- Zhou, J.; Li, H.; Cui, W. Low-Complexity Joint Transmit and Receive Beamforming for MIMO Radar with Multi-Targets. IEEE Signal Process. Lett. 2020, 27, 1410–1414. [Google Scholar] [CrossRef]
- Wang, M.; Gao, F.; Jin, S.; Lin, H. An Overview of Enhanced Massive MIMO with Array Signal Processing Techniques. IEEE J. Sel. Top. Signal Process. 2019, 13, 886–901. [Google Scholar] [CrossRef]
- Zoltowski, M.; Shuman, M.; Rangaswamy, M. Virtual Waveform Diversity with Phase-Coded Radar Waveforms. In Proceedings of the 2021 55th Asilomar Conference on Signals, Systems, and Computers, Pacific Grove, CA, USA, 31 October–3 November 2021; pp. 1048–1052. [Google Scholar]
- Davis, R.M.; Fante, R.L.; Perry, R.P. Phase-coded waveforms for radar. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 401–408. [Google Scholar] [CrossRef]
- Qureshi, T.R.; Zoltowski, M.D.; Calderbank, R. A novel approach to Doppler compensation and estimation for multiple targets in MIMO radar with unitary waveform matrix scheduling. In Proceedings of the 2012 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Kyoto, Japan, 25–30 March 2012; pp. 2473–2476. [Google Scholar]
- Wang, H.; Zhu, X. The parameter estimation of transmit diversity MIMO radar with iteratively adaptive pulse compression and Doppler compensation. In Proceedings of the 2015 International Conference on Wireless Communications & Signal Processing (WCSP), Nanjing, China, 15–17 October 2015; pp. 1–5. [Google Scholar]
- Zhu, J.; Song, Y.; Jiang, N.; Xie, Z.; Fan, C.; Huang, X. Enhanced Doppler Resolution and Sidelobe Suppression Performance for Golay Complementary Waveforms. Remote Sens. 2023, 15, 2452. [Google Scholar] [CrossRef]
- Guan, J.; Pei, J.; Huang, Y.; Chen, X.; Chen, B. Time-Range Adaptive Focusing Method Based on APC and Iterative Adaptive Radon-Fourier Transform. Remote Sens. 2022, 14, 6182. [Google Scholar] [CrossRef]
- Cui, N.; Duan, K.; Xing, K.; Yu, Z. Beam-Space Reduced-Dimension 3D-STAP for Nonside-Looking Airborne Radar. IEEE Geosci. Remote Sens. Lett. 2022, 19, 3506505. [Google Scholar] [CrossRef]
- Wen, C.; Huang, Y.; Peng, J.; Wu, J.; Zheng, G.; Zhang, Y. Slow-Time FDA-MIMO Technique with Application to STAP Radar. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 74–95. [Google Scholar] [CrossRef]
- Yardibi, T.; Li, J.; Stoica, P.; Xue, M.; Baggeroer, A.B. Source Localization and Sensing: A Nonparametric Iterative Adaptive Approach Based on Weighted Least Squares. IEEE Trans. Aerosp. Electron. Syst. 2010, 46, 425–443. [Google Scholar] [CrossRef]
- Tian, J.; Zhang, B.; Li, K.; Cui, W.; Wu, S. Low-Complexity Iterative Adaptive Approach Based on Range–Doppler Matched Filter Outputs. IEEE Trans. Aerosp. Electron. Syst. 2023, 59, 125–139. [Google Scholar] [CrossRef]
- Chen, C.Y.; Vaidyanathan, P.P. MIMO Radar Space–Time Adaptive Processing Using Prolate Spheroidal Wave Functions. IEEE Trans. Signal Process. 2008, 56, 623–635. [Google Scholar] [CrossRef]
- Reed, I.S.; Mallett, J.D.; Brennan, L.E. Rapid Convergence Rate in Adaptive Arrays. IEEE Trans. Aerosp. Electron. Syst. 1974, AES-10, 853–863. [Google Scholar] [CrossRef]
- Brigui, F.; Boizard, M.; Ginolhac, G.; Pascal, F. New Low-Rank Filters for MIMO-STAP Based on an Orthogonal Tensorial Decomposition. IEEE Trans. Aerosp. Electron. Syst. 2018, 54, 1208–1220. [Google Scholar] [CrossRef]
- Feng, W.; Zhang, Y.; He, X. Clutter Rank Estimation for Reduce-Dimension Space-Time Adaptive Processing MIMO Radar. IEEE Sens. J. 2017, 17, 238–239. [Google Scholar] [CrossRef]
- Feng, W.; Guo, Y.; He, X.; Liu, H.; Gong, J. Jointly Iterative Adaptive Approach Based Space Time Adaptive Processing Using MIMO Radar. IEEE Access 2018, 6, 26605–26616. [Google Scholar] [CrossRef]
- Rytel-Andrianik, R. Efficient matched filtering and beamforming for coherent MIMO radar. In Proceedings of the 2016 IEEE International Symposium on Phased Array Systems and Technology (PAST), Waltham, MA, USA, 18–21 October 2016; pp. 1–6. [Google Scholar]
- Malik, H.; Burki, J.; Mumtaz, M.Z. Adaptive Pulse Compression for Sidelobes Reduction in Stretch Processing Based MIMO Radars. IEEE Access 2022, 10, 93231–93244. [Google Scholar] [CrossRef]
- Gao, Z.; Wang, X.; Huang, P.; Xu, W.; Zhang, Z. Arc Array Radar IAA-STAP Algorithm Based on Sparse Constraint. In Proceedings of the 2020 International Conference on Information Science, Parallel and Distributed Systems (ISPDS), Xi’an, China, 14–16 August 2020; pp. 277–282. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Target Number | Angle–Doppler–Distance |
|---|---|
| 1 | (0°, 0.3, 80) |
| 2 | (0°, −0.1, 80) |
| 3 | (0°, 0.1, 80) |
| 4 | (40°, 0.1, 80) |
| 5 | (−40°, 0.1, 80) |
| 6 | (0°, 0.1, 70) |
| 7 | (0°, 0.1, 90) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guan, J.; Mu, X.; Huang, Y.; Chen, B.; Liu, N.; Chen, X. A Space–Time–Range Joint Adaptive Focusing and Detection Method for Multiple Input Multiple Output Radar. Remote Sens. 2023, 15, 4509. https://doi.org/10.3390/rs15184509
Guan J, Mu X, Huang Y, Chen B, Liu N, Chen X. A Space–Time–Range Joint Adaptive Focusing and Detection Method for Multiple Input Multiple Output Radar. Remote Sensing. 2023; 15(18):4509. https://doi.org/10.3390/rs15184509
Chicago/Turabian StyleGuan, Jian, Xiaoqian Mu, Yong Huang, Baoxin Chen, Ningbo Liu, and Xiaolong Chen. 2023. "A Space–Time–Range Joint Adaptive Focusing and Detection Method for Multiple Input Multiple Output Radar" Remote Sensing 15, no. 18: 4509. https://doi.org/10.3390/rs15184509
APA StyleGuan, J., Mu, X., Huang, Y., Chen, B., Liu, N., & Chen, X. (2023). A Space–Time–Range Joint Adaptive Focusing and Detection Method for Multiple Input Multiple Output Radar. Remote Sensing, 15(18), 4509. https://doi.org/10.3390/rs15184509