


Assessment of the Declining Degree of Farmland Shelterbelts in a Desert Oasis Based on LiDAR and Hyperspectral Imagery
Abstract
:1. Introduction
2. Materials and Methods
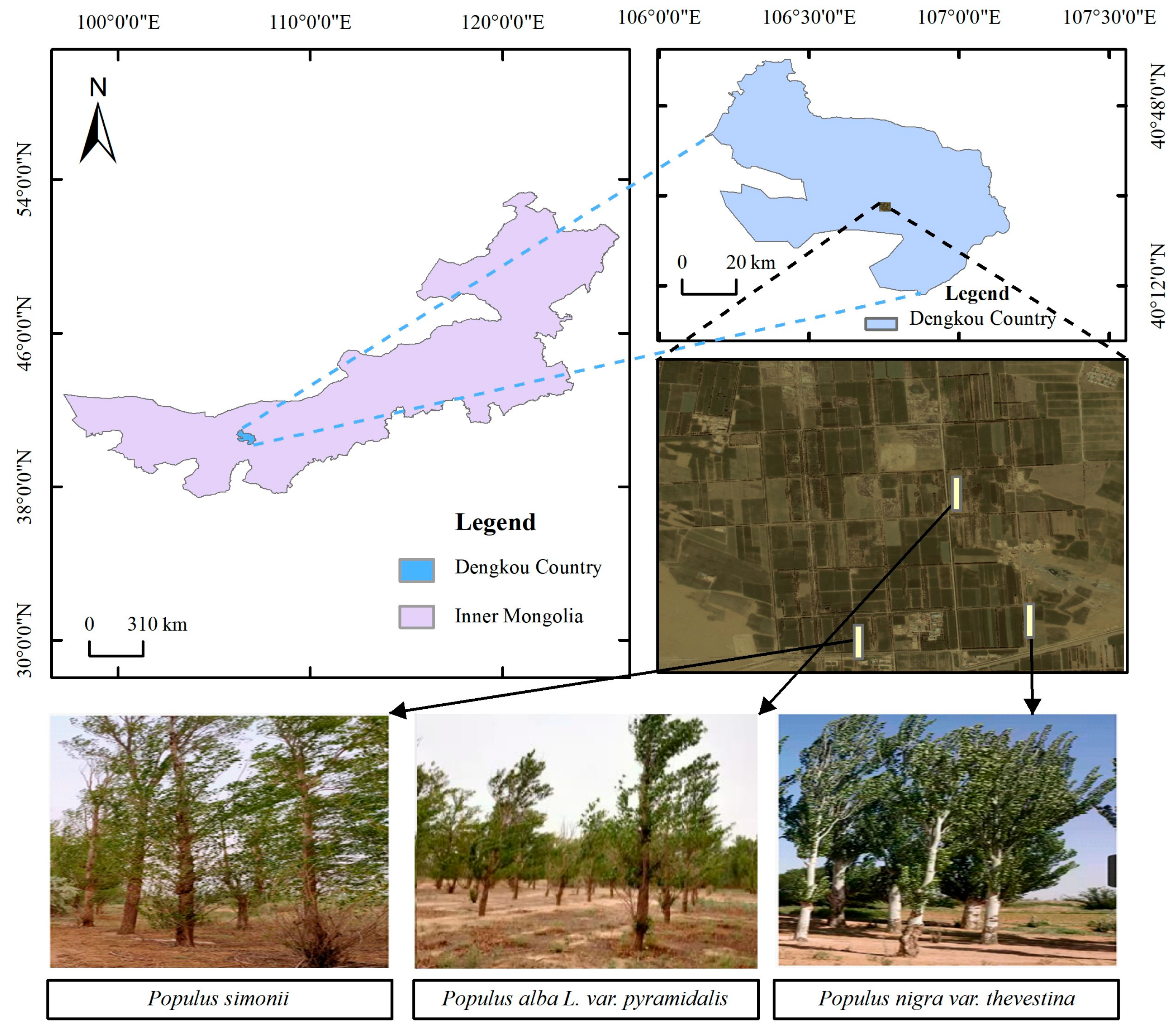
2.1. Study Area
2.2. Data
2.2.1. Field Survey Data
2.2.2. LiDAR Data Acquisition and Processing
2.2.3. Hyperspectral Imagery Acquisition and Processing
2.3. Construction of the Identification Model of Tree Decline Degree
2.4. Accuracy Evaluation
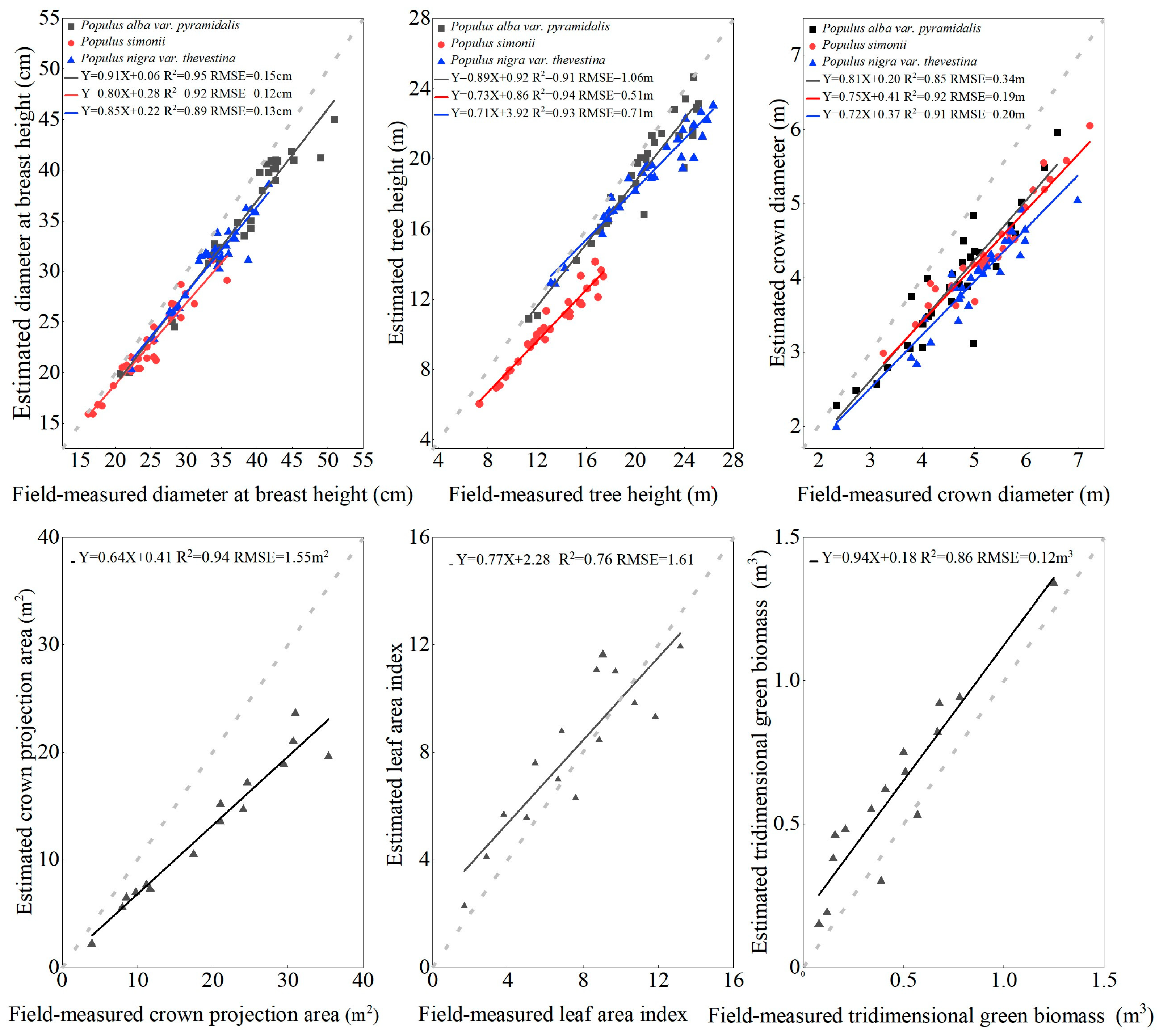
2.4.1. Accuracy Calculation of Structure Parameters Extracted by TLS
2.4.2. Calculation of the Accuracy of the Decline Degree Identification Model
3. Results
3.1. Accuracy Analysis of Extracting Forest Structure Parameters by TLS
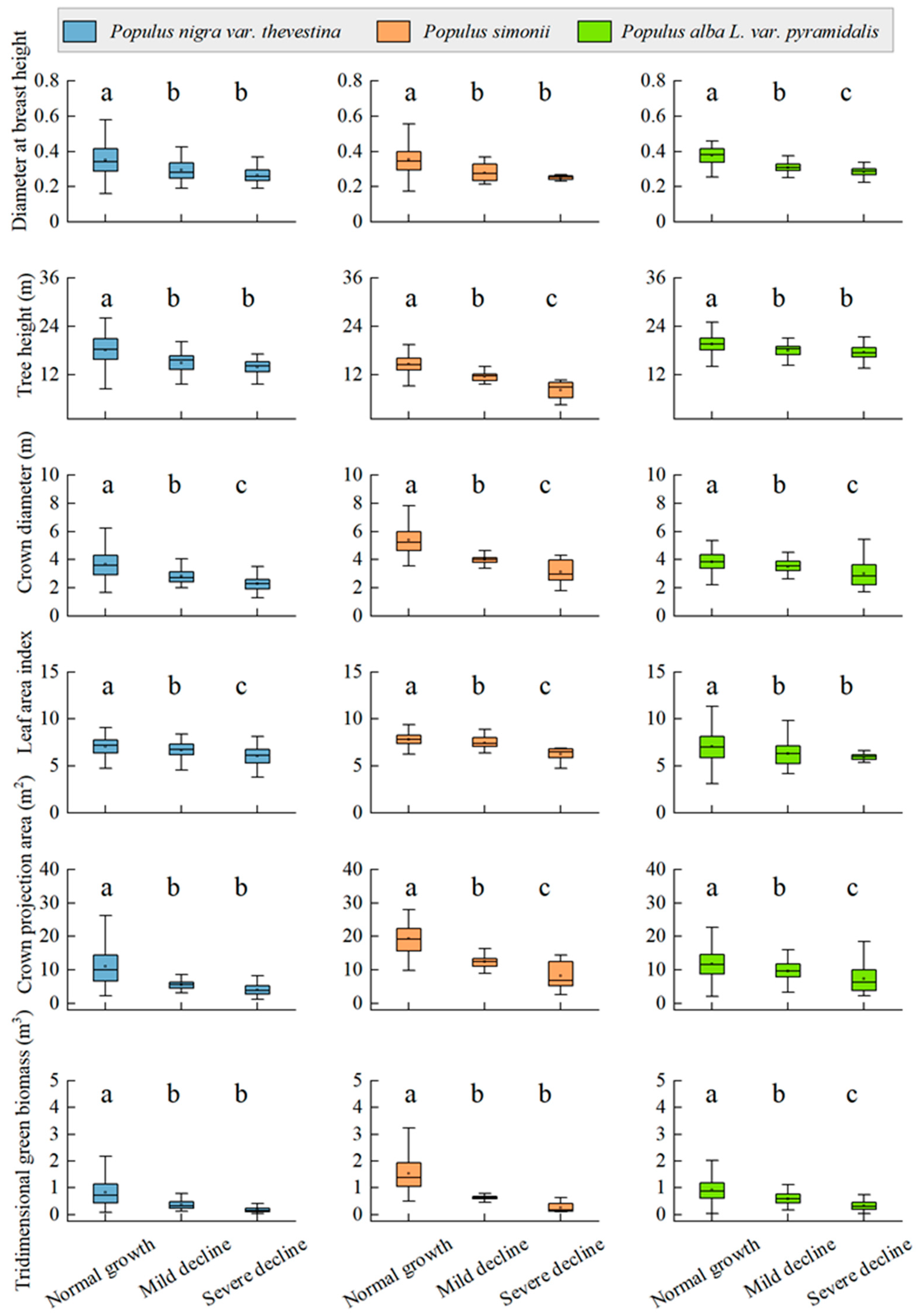
3.2. Structural Characteristics of Forest Trees with Different Degrees of Decline
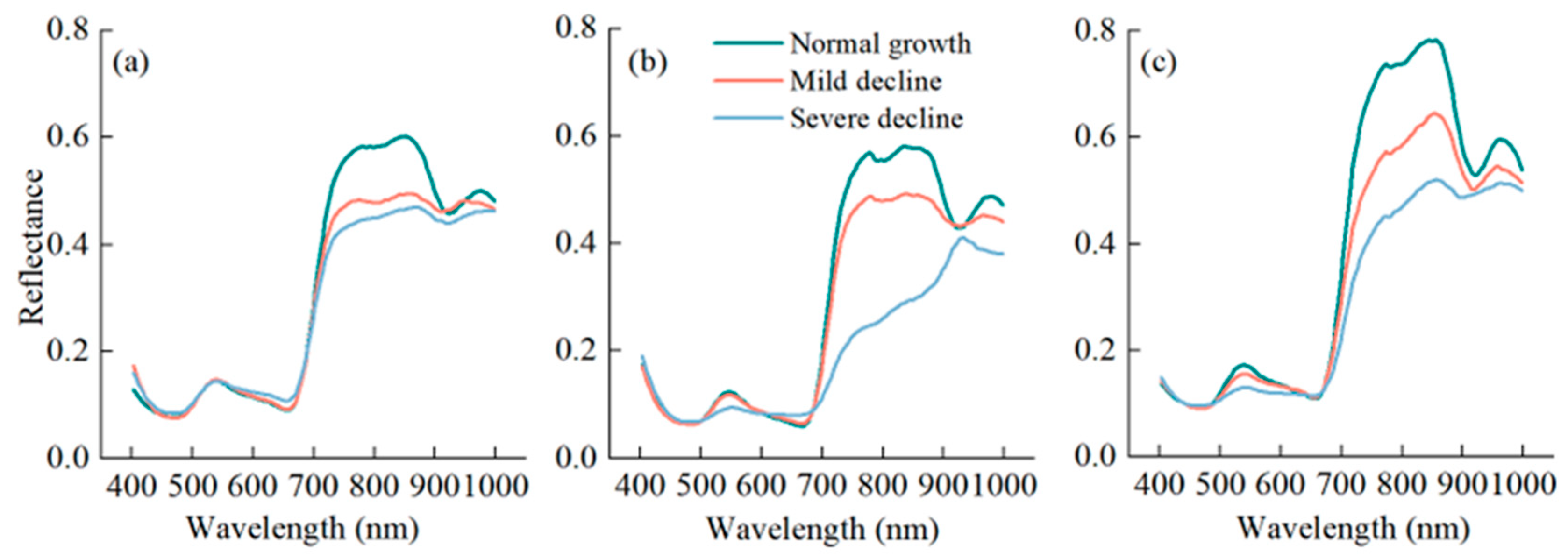
3.3. Spectral Characteristics of Forest Trees with Different Degrees of Decline
3.3.1. Raw Spectral Characteristics of Trees
3.3.2. First-Order Derivative Spectral Characteristics of Trees
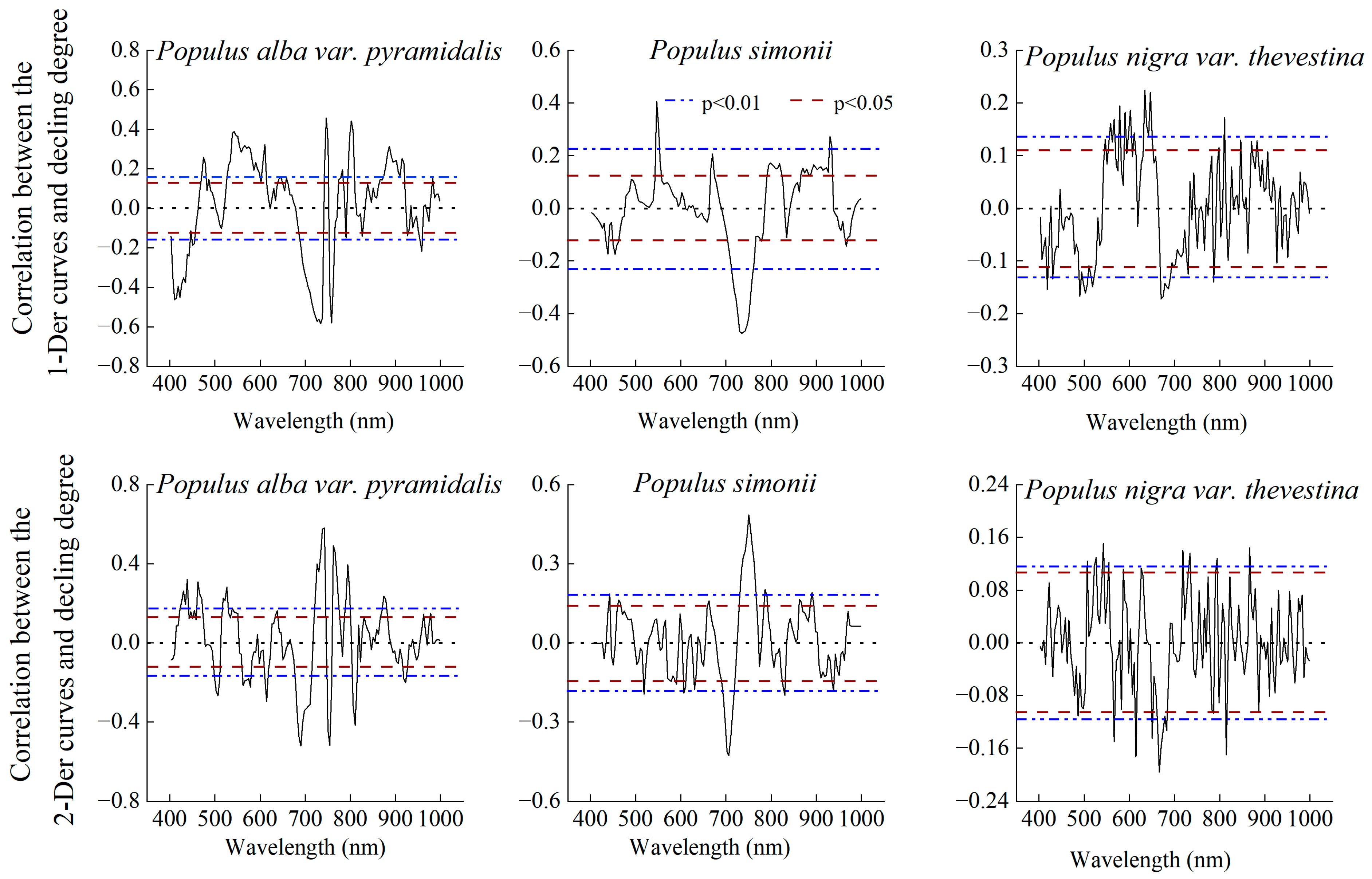
3.3.3. Correlation between the Degree of Decline and Spectral Reflectance
3.4. Screening of Parameters Characterizing Forest Decline
3.4.1. Characteristic Parameters Based on TLS
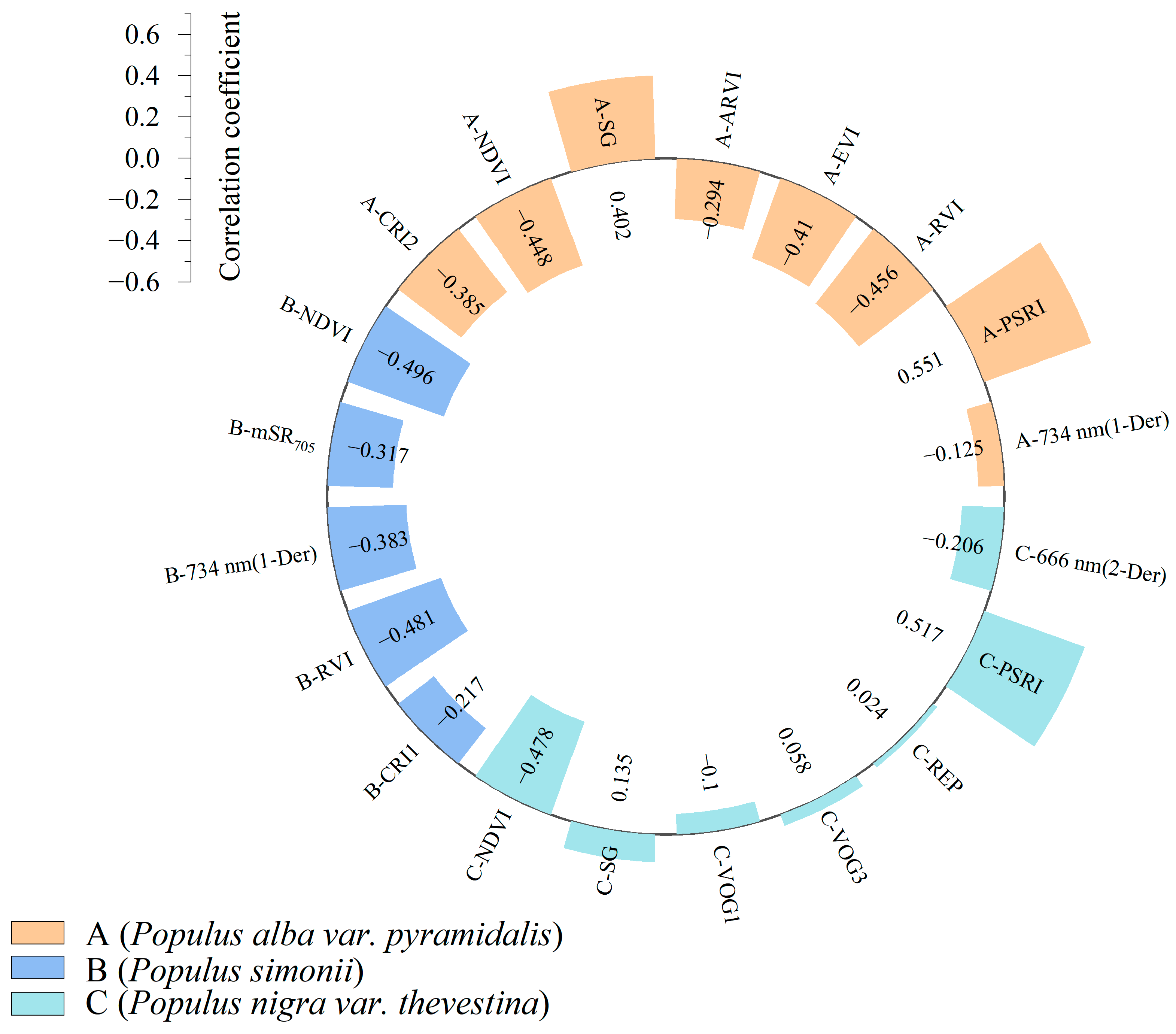
3.4.2. Characteristic Parameters Based on AHI
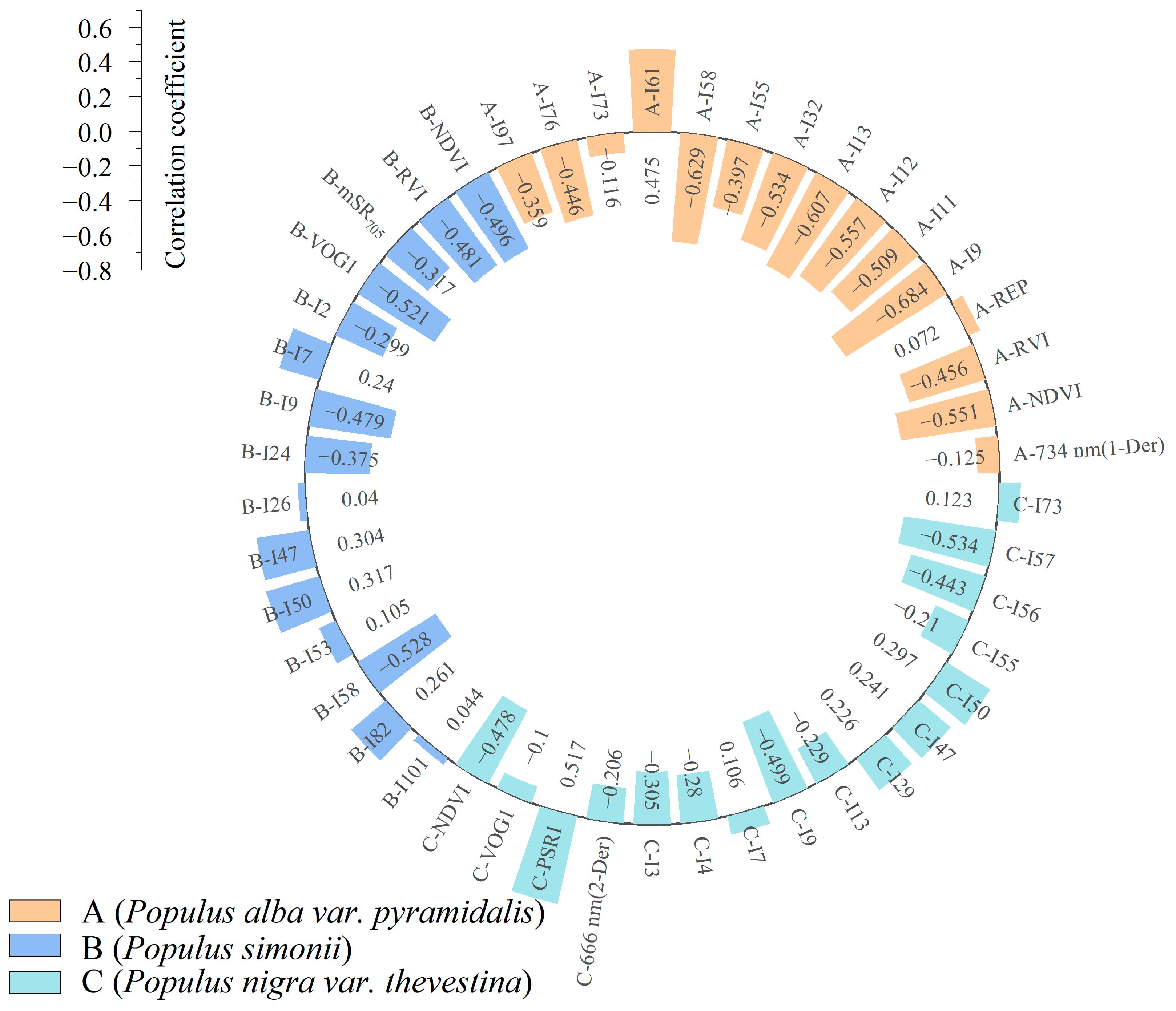
3.4.3. Characteristic Parameters Combining AHI and TLS
3.5. Construction and Accuracy Evaluation of a Model for Identifying the Degree of Trees Decline
3.5.1. Models for Identifying Tree Decline Degree Based on TLS
3.5.2. Models for Identifying Tree Decline Degree Based on AHI
3.5.3. Models for Identifying the Degree of Tree Decline Based on Features Combined TLS and AHI
4. Discussion
4.1. The Accuracy of Parameters Extracted by TLS and the Characteristics of Structural Parameters of Different Declining Trees
4.2. Hyperspectral Characteristics of Trees with Different Declining Degrees
4.3. Characterization Parameters and Classification Model of Forest Decay Degree
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Cheng, G.; Zhu, M.; Zhang, X.; Guo, Y.; Yang, Y.; Yun, C.; Wu, Y.; Wang, Q.; Wang, W.; Wang, H. Northeastern China shelterbelt-farmland glomalin differences depend on geo-climates, soil depth, and microbial interaction: Carbon sequestration, nutrient retention and implication. Appl. Soil Ecol. 2023, 191, 105068. [Google Scholar] [CrossRef]
- Li, X.; Liu, L.; Xie, J.; Wang, Z.; Li, Y. Optimizing the quantity and spatial patterns of farmland shelter forests increases cotton productivity in arid lands. Agric. Ecosyst. Environ. 2020, 292, 106832. [Google Scholar] [CrossRef]
- Du, J.; Wang, X.; Huo, Z.; Guan, H.; Huang, G. Response of shelterbelt transpiration to shallow groundwater in arid areas. J. Hydrol. 2020, 592, 125611. [Google Scholar] [CrossRef]
- Liu, Z.; Jia, G.; Yu, X. Variation of water uptake in degradation agroforestry shelterbelts on the North China Plain. Agric. Ecosyst. Environ. 2020, 287, 106697. [Google Scholar] [CrossRef]
- Saunders, A.; Drew, D.M.; Brink, W. Machine learning models perform better than traditional empirical models for stomatal conductance when applied to multiple tree species across different forest biomes—ScienceDirect. Trees For. People 2021, 6, 100139. [Google Scholar] [CrossRef]
- Gao, Y.; Skutsch, M.; Rodríguez, D.L.J.; Solórzano, J.V. Identifying Variables to Discriminate between Conserved and Degraded Forest and to Quantify the Differences in Biomass. Forests 2020, 11, 1020. [Google Scholar] [CrossRef]
- Qu, F.; Zhang, Q.; Lu, Z.; Zhao, C.; Yang, C. Land subsidence and ground fissures in Xi’an, China 2005–2012 revealed by multi-band InSAR time-series analysis. Remote Sens. Environ. 2014, 155, 366–376. [Google Scholar] [CrossRef]
- Prodhan, F.A.; Zhang, J.; Bai, Y.; Sharma, T.P.P.; Koju, U.A. Monitoring of Drought Condition and Risk in Bangladesh Combined Data From Satellite and Ground Meteorological Observations. IEEE Access 2020, 8, 93264–93282. [Google Scholar] [CrossRef]
- Hosoi, F.; Omasa, K. Voxel-Based 3-D Modeling of Individual Trees for Estimating Leaf Area Density Using High-Resolution Portable Scanning Lidar. IEEE Trans. Geosci. Remote 2006, 44, 3610–3618. [Google Scholar] [CrossRef]
- Xun, L.; Zhang, J.; Cao, D.; Yang, S.; Yao, F. A novel cotton mapping index combining Sentinel-1 SAR and Sentinel-2 multispectral imagery. ISPRS-J. Photogramm. Remote Sens. 2021, 181, 148–166. [Google Scholar] [CrossRef]
- Korhonen, L.; Korpela, I.; Heiskanen, J.; Maltamo, M. Airborne discrete-return LIDAR data in the estimation of vertical canopy cover, angular canopy closure and leaf area index. Remote Sens. Environ. 2011, 115, 1065–1080. [Google Scholar] [CrossRef]
- Onojeghuo, A.O.; Blackburn, G.A. Optimising the use of hyperspectral and LiDAR data for mapping reedbed habitats. Remote Sens. Environ. 2011, 115, 2025–2034. [Google Scholar] [CrossRef]
- Monika, M.L.; Guang, Z. Retrieving Forest Inventory Variables with Terrestrial Laser Scanning (TLS) in Urban Heterogeneous Forest. Remote Sens. 2011, 4, 1–20. [Google Scholar]
- Wilson, N.; Bradstock, R.; Bedward, M. Detecting the effects of logging and wildfire on forest fuel structure using terrestrial laser scanning (TLS). For. Ecol. Manag. 2021, 488, 119037. [Google Scholar] [CrossRef]
- Meunier, F.; Moorthy, S.M.K.; Deurwaerder, H.P.T.D.; Kreus, R.; Verbeeck, H. Within-Site Variability of Liana Wood Anatomical Traits: A Case Study in Laussat, French Guiana. Forests 2020, 11, 523. [Google Scholar] [CrossRef]
- Othmani, A.; Voon, L.F.C.L.Y.; Stolz, C.; Piboule, A. Single tree species classification from Terrestrial Laser Scanning data for forest inventory. Pattern Recognit. Lett. 2013, 34, 2144–2150. [Google Scholar] [CrossRef]
- Kumazaki, R. Application of 3D tree modeling using point cloud data by terrestrial laser scanner. J. Jpn. Inst. Landsc. Archit. 2021, 84, 527–530. [Google Scholar] [CrossRef]
- Fan, G.; Nan, L.; Dong, Y.; Su, X.; Chen, F. AdQSM: A New Method for Estimating Above-Ground Biomass from TLS Point Clouds. Remote Sens. 2020, 12, 3089. [Google Scholar] [CrossRef]
- Valbuena, R.; Maltamo, M.; Packalen, P. Classification of multilayered forest development classes from low-density national airborne lidar datasets. Forestry. 2016, 89, 392–401. [Google Scholar] [CrossRef]
- Hosoi, F.; Nakabayashi, K.; Omasa, K. 3-D Modeling of Tomato Canopies Using a High-Resolution Portable Scanning Lidar for Extracting Structural Information. Sensors 2011, 11, 2166–2174. [Google Scholar] [CrossRef]
- Näsi, R.; Honkavaara, E.; Lyytikäinen-Saarenmaa, P.; Blomqvist, M.; Litkey, P.; Hakala, T.; Viljanen, N.; Kantola, T.; Tandhuapää, T.; Holopainen, M. Using UAV-Based Photogrammetry and Hyperspectral Imaging for Mapping Bark Beetle Damage at Tree-Level. Remote Sens. 2015, 7, 15467–15493. [Google Scholar] [CrossRef]
- Yuanyong, D.; Zengyuan, L.; Yong, P. Spectral and Texture Features Combined for Forest Tree species Classification with Airborne Hyperspectral Imagery. J. Indian Soc. Remote Sens. 2015, 43, 101–107. [Google Scholar]
- Shaokui Ge, M.X.G.L. Estimating Yellow Starthistle (Centaurea solstitialis) Leaf Area Index and Aboveground Biomass with the Use of Hyperspectral Data. Weed Sci. 2007, 55, 671–678. [Google Scholar]
- Ren, L. Three-Dimensional Convolutional Neural Network Model for Early Detection of Pine Wilt Disease Using UAV-Based Hyperspectral Images. Remote Sens. 2021, 13, 4065. [Google Scholar]
- Meng, R.; Dennison, P.E.; Zhao, F.; Shendryk, I.; Rickert, A.; Hanavan, R.P.; Cook, B.D.; Serbin, S.P. Mapping canopy defoliation by herbivorous insects at the individual tree level using bi-temporal airborne imaging spectroscopy and LiDAR measurements. Remote Sens. Environ. 2018, 215, 170–183. [Google Scholar] [CrossRef]
- Chi, D.; Degerickx, J.; Yu, K.; Somers, B. Urban Tree Health Classification Across Tree Species by Combining Airborne Laser Scanning and Imaging Spectroscopy. Remote Sens. 2020, 12, 2435. [Google Scholar] [CrossRef]
- Iordache, M.D.; Mantas, V.; Baltazar, E.; Lewyckyj, N. A Machine Learning Approach to Detecting Pine Wilt Disease Using Airborne Spectral Imagery. Remote Sens. 2020, 101, 102363. [Google Scholar] [CrossRef]
- Wang, Y.; Wei, J.; Zhou, M.; Liu, Y.; Sun, Y.; Zhao, X.; Guo, J. Ecological of Stoichiometric Characteristics of Populus davidiana forests with Different Growth and Decline Degrees in Southern Daxing’anling. Chin. J. Soil Sci. 2021, 52, 854–864. [Google Scholar]
- Zhang, W.; Qi, J.; Wan, P.; Wang, H.; Xie, D.; Wang, X.; Yan, G. An Easy-to-Use Airborne LiDAR Data Filtering Method Based on Cloth Simulation. Remote Sens. 2016, 8, 501. [Google Scholar] [CrossRef]
- Wang, D.; Momo, T.S.; Casella, E. LeWoS: A universal leaf-wood classification method to facilitate the 3D modelling of large tropical trees using terrestrial LiDAR. Methods Ecol. Evol. 2020, 11, 376–389. [Google Scholar] [CrossRef]
- Terryn, L.; Calders, K.; Bartholomeus, H.; Bartolo, R.E.; Brede, B.; D’Hont, B.; Disney, M.; Herold, M.; Lau, A.; Shenkin, A. Quantifying tropical forest structure through terrestrial and UAV laser scanning fusion in Australian rainforests. Remote Sens. Environ. 2022, 271, 112912. [Google Scholar] [CrossRef]
- Calders, K.; Newnham, G.; Burt, A.; Murphy, S.; Raumonen, P.; Herold, M.; Culvenor, D.; Avitabile, V.; Disney, M.; Armston, J.; et al. Nondestructive estimates of above-ground biomass using terrestrial laser scanning. Methods Ecol. Evol. 2015, 6, 198–208. [Google Scholar] [CrossRef]
- Chen, J. A simple method for reconstructing a high-quality NDVI time-series data set based on the Savitzky–Golay filter. Remote Sens. Environ. 2004, 91, 332–344. [Google Scholar] [CrossRef]
- Sidle, G.D. Using Multi-Class Machine Learning Methods to Predict Major League Baseball Pitches; North Carolina State University ProQuest Dissertations Publishing: Raleigh, NC, USA, 2017. [Google Scholar]
- Meng, H.; Li, C.; Zheng, X.; Gong, Y.; Liu, Y.; Pan, Y. Research on Extraction of Camellia Oleifera by Integrating Spectral, Texture and Time Sequence Remote Sensing Information. Spectrosc. Spectr. Anal. 2023, 43, 1589–1597. [Google Scholar]
- Zheng, G.; Moskal, L.M. Computational-Geometry-Based Retrieval of Effective Leaf Area Index Using Terrestrial Laser Scanning. IEEE Trans. Geosci. Remote Sens. 2012, 50, 3958–3969. [Google Scholar] [CrossRef]
- Sun, L.; Chang, X.; Yu, X.; Jia, G.; Chen, L.; Liu, Z.; Zhu, X. Precipitaion and soil water thresholds associated with drought-induced mortality of farmland shelter forests in a semi-arid area. Agric. Ecosyst. Environ. 2019, 284, 106595. [Google Scholar] [CrossRef]
- Liu, C.; Guo, J.; Cui, Y.; Lü, T.; Zhang, X.; Shi, G. Effects of cadmium and salicylic acid on growth, spectral reflectance and photosynthesis of castor bean seedlings. Plant Soil 2011, 344, 131–141. [Google Scholar] [CrossRef]
- Zhong, L.B.; Wiktorsson, B.; Ryberg, M.; Sundqvist, C. The Shibata shift; effects of in vitro conditions on the spectral blue-shift of chlorophyllide in irradiated isolated prolamellar bodies. J. Photochem. Photobiol. B Biol. 1996, 36, 263–270. [Google Scholar] [CrossRef]
- Wang, H.; Shi, L.; Ma, Y.; Shu, Q.; Liao, H.; Du, T. Research of Damage Monitoring Models and Judgment Rules of Pinus yunnanensis with Tomicus yunnanensis. For. Res. 2018, 31, 53–60. [Google Scholar]
- Ma, Y.; Yang, B.; Zhao, N.; Zhang, X. Classification Diagnosis on the Damage Degree of Tomicus yunnanensis to Pinus yunnanensis Based on Hyperspectral and Airborne LiDAR. J. Southwest For. Univ. 2022, 42, 80–89. [Google Scholar]
- Degerickx, J.; Roberts, D.A.; Mcfadden, J.P.; Hermy, M.; Somers, B. Urban tree health assessment using airborne hyperspectral and LiDAR imagery. Int. J. Appl. Earth Obs. Geoinf. 2018, 73, 26–38. [Google Scholar] [CrossRef]
- Huo, L.; Zhang, N.; Zhang, X.; Wu, Y. Tree defoliation classification based on point distribution features derived from single-scan terrestrial laser scanning data. Ecol. Indic. 2019, 103, 782–790. [Google Scholar] [CrossRef]
- Parker, G.G.; Russ, M.E. The canopy surface and stand development: Assessing forest canopy structure and complexity with near-surface altimetry. For. Ecol. Manag. 2004, 189, 307–315. [Google Scholar] [CrossRef]
- Lin, Q.; Huang, H.; Wang, J.; Huang, K.; Liu, Y. Detection of Pine Shoot Beetle (PSB) Stress on Pine Forests at Individual Tree Level using UAV-Based Hyperspectral Imagery and Lidar. Remote Sens. 2019, 11, 2540. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Species | Row | Age (a) | Shelterbelt Length and Width (m) | Spacing (m) | Direction | Number |
|---|---|---|---|---|---|---|
| Populus alba var. pyramidalis | 5 | 28 | 450 × 20 | 4.5 × 5 | north-south | 450 |
| Populus simonii | 4 | 35 | 196 × 15 | 4 × 5 | north-south | 192 |
| Populus nigra var. thevestina | 8 | 33 | 390 × 35 | 5 × 5 | north-south | 378 |
| Label | Index | Description |
|---|---|---|
| I1 | Diameter at breast height | Diameter of the tree trunk at 1.3 m above ground level |
| I2 | Tree height | Distance from the top of the stand vertically to the ground |
| I3 | Crown diameter | Diameter of each tree crown |
| I4 | Crown projection area | Area of the forest canopy projected vertically on the ground |
| I5 | Tridimensional green biomass | Volume of space occupied by total plant stems and leaves |
| I6 | Leaf area index | Ratio of the total leaf area per unit land area to the land area |
| I7 | Gap fraction | Probability of light passing through the canopy and reaching the surface without being intercepted |
| Labels | Indices | Description |
|---|---|---|
| I8 | Haad | Average absolute deviation of the height of the tree points: mean(abs(H − Havg)) |
| I9 | Hccr | Canopy relief ratio of tree points: (Havg − Hmin)/(Hmax − Hmin) |
| I10–I24 | Hcuh1-Hcuh99 | Cumulative height percentiles (i.e., 1, 5, …, 99) of tree points |
| I25 | Hcv | Coefficient of variation of the height of the tree points |
| I26 | Hkur | Kurtosis of the height of the tree points |
| I27 | Hmad | Median absolute deviation of the height of the tree points: median(abs(H − Hp50)) |
| I28 | Hmax | Maximum height of the tree points |
| I29 | Hmin | Minimum height of the tree points |
| I30 | Havg | Average height of the tree points |
| I31 | Hmed | Median height of the tree points |
| I32–I46 | Hhei1-Hhei99 | Height percentiles (i.e., 1, 5, …, 99) of tree points |
| I47 | Hske | Skewness of the height of the tree points |
| I48 | Hstd | Standard deviation of the height of the tree points |
| I49 | Hvar | Variance of the height of the tree points |
| I50–I59 | Dsp1-Dsp10 | 1st, 2nd… 10th slices point cloud density |
| I60 | Iaad | Average absolute deviation of intensity of tree laser returns: mean(abs(I − Iavg)) |
| I61 | Icv | Coefficient of variation of intensity of tree laser returns |
| I62–I76 | Icip1-Icip99 | Cumulative intensity percentiles (i.e., 1, 10, …, 99) of tree laser returns |
| I77 | Ikur | Kurtosis of intensity of tree laser returns |
| I78 | Imad | Median absolute deviation of intensity of tree laser returns: median(abs(I − Ip50)) |
| I79 | Imax | Maximum intensity of tree laser returns |
| I80 | Imed | Median intensity of tree laser returns |
| I81 | Iavg | Average intensity of tree laser returns |
| I82 | Imin | Minimum intensity of tree laser returns |
| I83 | Iske | Skewness of intensity of tree laser returns |
| I84 | Ivar | Variance of intensity of tree laser returns |
| I85 | Istd | Standard deviation of intensity of tree laser returns |
| I86–I100 | Ip1–Ip99 | Intensity percentiles (i.e., 1, 5, …, 99) of tree laser returns |
| I101 | Iipr | Inter-percentile range of intensity of tree laser returns: Ip75–Ip25 |
| Indices | Formula |
|---|---|
| Normalized difference vegetation index (NDVI) | (RNIR − Rred)/(RNIR + Rr) |
| Simple ratio index (RVI) | RNIR/Rred |
| Enhanced vegetation index (EVI) | 2.5(RNIR − Rred)/[RNIR + 6Rred − 7.5Rblue + 1) |
| Atmospherically resistant vegetation index (ARVI) | [RNIR − 2(Rred − Rblue)]/[RNIR + 2(Rred − Rblue)] |
| Red-edge normalized difference vegetation index (NDVI705) | (R750 − R705)/(R750 + R705) |
| Modified red-edge simple ratio index (mSR705) | (R750 − R445)/(R705 + R445) |
| Modified red edge normalized difference vegetation index (mNDVI705) | (R750 − R705)/(R750 + R705 − 2R445) |
| Sum green index (SGI) | |
| Vogelmann red-edge index 1 (VOG1) | R740/R720 |
| Vogelmann red-edge index 2 (VOG2) | (R734 − R747)/(R715 + R726) |
| Vogelmann red-edge index 3 (VOG3) | (R734 − R747)/(R715 + R720) |
| Red-edge position index (REP) | |
| Photochemical reflectance index (PRI) | (R531 − R570)/(R531 + R570) |
| Structure insensitive pigment index (SIPI) | (R800 − R445)/(R800 + R680) |
| Red green ratio index (RG) | |
| Plant senescence reflectance index (PSRI) | (R680 − R500)/R750 |
| Carotenoid reflectance index 1 (CRI1) | (1/R510)− (1/R550) |
| Carotenoid reflectance index 2 (CRI2) | (1/R510) − (1/R700) |
| Anthocyanin reflectance index 1 (ARI1) | (1/R550) − (1/R700) |
| Anthocyanin reflectance index 2 (ARI2) | R800 [(1/R550) − (1/R700)] |
| Water band index (WBI) | R900/R970 |
| Species | Classification Model | OA | Kc |
|---|---|---|---|
| Populus alba var. pyramidalis | RF | 0.85 | 0.78 |
| ANN | 0.87 | 0.81 | |
| KNN | 0.75 | 0.62 | |
| SVM | 0.83 | 0.79 | |
| LightGBM | 0.84 | 0.76 | |
| MLP | 0.84 | 0.76 | |
| Mean value | 0.83 a | 0.75 a | |
| Populus simonii | RF | 0.73 | 0.60 |
| ANN | 0.81 | 0.72 | |
| KNN | 0.80 | 0.70 | |
| SVM | 0.84 | 0.82 | |
| LightGBM | 0.72 | 0.58 | |
| MLP | 0.79 | 0.68 | |
| Mean value | 0.78 a | 0.68 a | |
| Populus nigra var. thevestina | RF | 0.72 | 0.58 |
| ANN | 0.65 | 0.44 | |
| KNN | 0.69 | 0.48 | |
| SVM | 0.61 | 0.40 | |
| LightGBM | 0.74 | 0.62 | |
| MLP | 0.72 | 0.58 | |
| Mean value | 0.69 b | 0.52 b |
| Species | Classification Model | OA | Kc |
|---|---|---|---|
| Populus alba var. pyramidalis | RF | 0.67 | 0.46 |
| ANN | 0.58 | 0.37 | |
| KNN | 0.65 | 0.44 | |
| SVM | 0.61 | 0.42 | |
| LightGBM | 0.68 | 0.52 | |
| MLP | 0.57 | 0.35 | |
| Mean value | 0.63 a | 0.43 a | |
| Populus simonii | RF | 0.67 | 0.46 |
| ANN | 0.62 | 0.43 | |
| KNN | 0.60 | 0.40 | |
| SVM | 0.65 | 0.44 | |
| LightGBM | 0.59 | 0.38 | |
| MLP | 0.50 | 0.25 | |
| Mean value | 0.61 a | 0.39 a | |
| Populus nigra var. thevestina | RF | 0.66 | 0.44 |
| ANN | 0.65 | 0.44 | |
| KNN | 0.56 | 0.38 | |
| SVM | 0.55 | 0.33 | |
| LightGBM | 0.61 | 0.41 | |
| MLP | 0.55 | 0.33 | |
| Mean value | 0.60 a | 0.39 a |
| Species | Classification Model | OA | Kc |
|---|---|---|---|
| Populus alba var. pyramidalis | RF | 0.89 | 0.84 |
| ANN | 0.89 | 0.85 | |
| KNN | 0.63 | 0.44 | |
| SVM | 0.88 | 0.82 | |
| LightGBM | 0.90 | 0.85 | |
| MLP | 0.79 | 0.69 | |
| Mean value | 0.83 a | 0.75 a | |
| Populus simonii | RF | 0.92 | 0.88 |
| ANN | 0.88 | 0.82 | |
| KNN | 0.71 | 0.53 | |
| SVM | 0.80 | 0.71 | |
| LightGBM | 0.88 | 0.82 | |
| MLP | 0.86 | 0.78 | |
| Mean value | 0.84 a | 0.76 a | |
| Populus nigra var. thevestina | RF | 0.80 | 0.71 |
| ANN | 0.83 | 0.72 | |
| KNN | 0.78 | 0.68 | |
| SVM | 0.64 | 0.45 | |
| LightGBM | 0.86 | 0.74 | |
| MLP | 0.72 | 0.68 | |
| Mean value | 0.77 a | 0.66 a |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, C.; Yang, Y.; Xin, Z.; Li, J.; Jia, X.; Fan, G.; Zhu, J.; Song, J.; Wang, Z.; Xiao, H. Assessment of the Declining Degree of Farmland Shelterbelts in a Desert Oasis Based on LiDAR and Hyperspectral Imagery. Remote Sens. 2023, 15, 4508. https://doi.org/10.3390/rs15184508
Luo C, Yang Y, Xin Z, Li J, Jia X, Fan G, Zhu J, Song J, Wang Z, Xiao H. Assessment of the Declining Degree of Farmland Shelterbelts in a Desert Oasis Based on LiDAR and Hyperspectral Imagery. Remote Sensing. 2023; 15(18):4508. https://doi.org/10.3390/rs15184508
Chicago/Turabian StyleLuo, Chengwei, Yuli Yang, Zhiming Xin, Junran Li, Xiaoxiao Jia, Guangpeng Fan, Junying Zhu, Jindui Song, Zhou Wang, and Huijie Xiao. 2023. "Assessment of the Declining Degree of Farmland Shelterbelts in a Desert Oasis Based on LiDAR and Hyperspectral Imagery" Remote Sensing 15, no. 18: 4508. https://doi.org/10.3390/rs15184508
APA StyleLuo, C., Yang, Y., Xin, Z., Li, J., Jia, X., Fan, G., Zhu, J., Song, J., Wang, Z., & Xiao, H. (2023). Assessment of the Declining Degree of Farmland Shelterbelts in a Desert Oasis Based on LiDAR and Hyperspectral Imagery. Remote Sensing, 15(18), 4508. https://doi.org/10.3390/rs15184508