
A Novel Deep Multi-Image Object Detection Approach for Detecting Alien Barleys in Oat Fields Using RGB UAV Images


 , ,
, ,
Abstract
1. Introduction
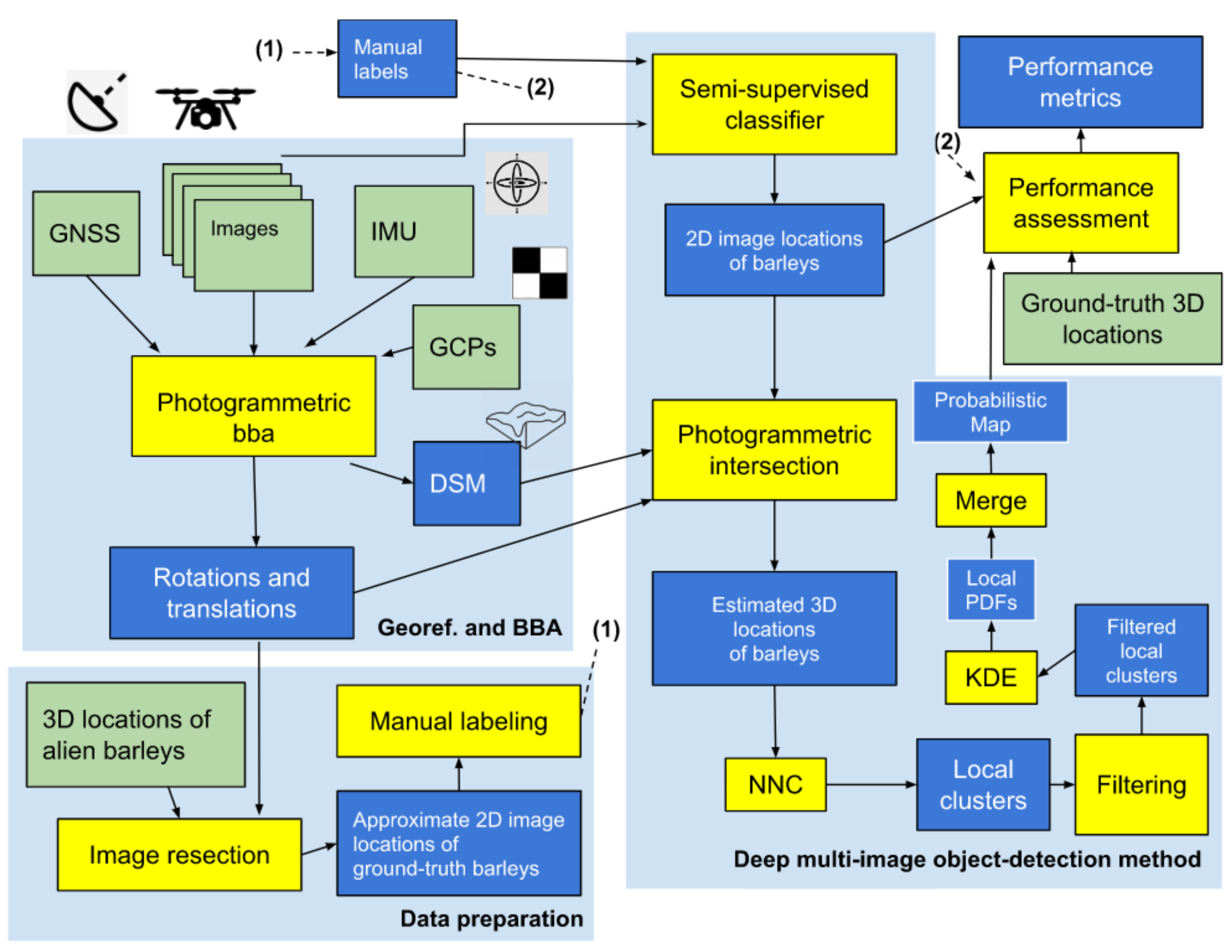
- Proposing a complete pipeline for detecting the 3D positions of alien barley ears in an oat stand as a probabilistic map;
- Demonstrating the efficiency of the proposed semi-supervised classifier in detecting barley ears at the image and ground levels;
- Coupling the image-level estimates with a clustering approach to form a probability density function (PDF) of barley plants as a reliable and robust estimate;
- Demonstrating the effectiveness of the complete pipeline proposed by applying it to a completely unseen dataset.
2. Deep Multi-Image Object Detection Method
2.1. Georeferencing
2.2. Annotation
2.3. Deep Multi-Image Object Detection
2.3.1. Semi-Supervised Method: Unbiased Teacher v2
2.3.2. Automatic Labeling and 3D-Position Estimation of Unlabeled Barley Plants
- Constituting a linear relationship between an image point and its corresponding focal points of the underlying images;
- Estimating 3D positions of alien barley plants based on spatial intersection between lines and the DSM. Iterative approach (Figure 3):
- Considering an approximate plane with a height equal to the average height of the DSM.
- Finding the intersection between the plane and the line passing by the image point.
- Projecting back the estimated point on the DSM and estimating a new height.
- Repeating until the difference between the estimation and the projection becomes small.
- Intersecting 3D positions on all images to find all possible correspondences for each alien barley plant;
- Clustering nearby detected positions of each alien barley plant in all images;
- Filtering out weak clusters based on a criterion such as the number of intersected rays, or acceptable image residuals. The inner part of the mentioned algorithm is depicted in Figure 3.
2.3.3. Clustering Approaches
2.3.4. Kernel Density Estimation (KDE)
3. Materials and Method
3.1. Study Area and Reference Data
3.2. Drone Data
3.3. Labeling and Classification
- -
- 3463 labeled patches;
- -
- 72,000 unlabeled patches;
- -
- 274 labeled patches reserved as a test set.
3.4. Implementation Details
3.5. Performance Metrics
4. Results
4.1. Image-Level Detection
4.2. Object-Level Detection at Trial Site
4.3. Object-Level Detection at the Test Site
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Butt, M.S.; Tahir-Nadeem, M.; Khan, M.K.I.; Shabir, R.; Butt, M.S. Oat: Unique among the Cereals. Eur. J. Nutr. 2008, 47, 68–79. [Google Scholar] [CrossRef]
- Varma, P.; Bhankharia, H.; Bhatia, S. Oats: A Multi-Functional Grain. J. Clin. Prev. Cardiol. 2016, 5, 9. [Google Scholar] [CrossRef]
- Stevens, E.J.; Armstrong, K.W.; Bezar, H.J.; Griffin, W.B.; Hampton, J.G. Fodder Oats an Overview. Fodd. Oats World Overv. 2004, 33, 11–18. [Google Scholar]
- Production of Oats Worldwide 2022/2023. Available online: https://www.statista.com/statistics/1073536/production-of-oats-worldwide/ (accessed on 11 May 2023).
- Leading Oats Producers Worldwide 2022 | Statista. Available online: https://www.statista.com/statistics/1073550/global-leading-oats-producers/ (accessed on 11 May 2023).
- Rosle, R.; Che’Ya, N.N.; Ang, Y.; Rahmat, F.; Wayayok, A.; Berahim, Z.; Fazlil Ilahi, W.F.; Ismail, M.R.; Omar, M.H. Weed Detection in Rice Fields Using Remote Sensing Technique: A Review. Appl. Sci. 2021, 11, 10701. [Google Scholar] [CrossRef]
- Green, P.H.; Cellier, C. Celiac Disease. N. Engl. J. Med. 2007, 357, 1731–1743. [Google Scholar] [CrossRef] [PubMed]
- Fasano, A.; Araya, M.; Bhatnagar, S.; Cameron, D.; Catassi, C.; Dirks, M.; Mearin, M.L.; Ortigosa, L.; Phillips, A. Federation of International Societies of Pediatric Gastroenterology, Hepatology, and Nutrition Consensus Report on Celiac Disease. J. Pediatr. Gastroenterol. Nutr. 2008, 47, 214–219. [Google Scholar] [CrossRef] [PubMed]
- Akter, S. Formulation of Gluten-Free Cake for Gluten Intolerant Individuals and Evaluation of Nutritional Quality. PhD Thesis, Chattogram Veterinary and Animal Sciences University, Chattogram, Bangladesh, 2020. [Google Scholar]
- Erkinbaev, C.; Henderson, K.; Paliwal, J. Discrimination of Gluten-Free Oats from Contaminants Using near Infrared Hyperspectral Imaging Technique. Food Control 2017, 80, 197–203. [Google Scholar] [CrossRef]
- Wang, T.; Thomasson, J.A.; Isakeit, T.; Yang, C.; Nichols, R.L. A Plant-by-Plant Method to Identify and Treat Cotton Root Rot Based on UAV Remote Sensing. Remote Sens. 2020, 12, 2453. [Google Scholar] [CrossRef]
- Hennessy, A.; Clarke, K.; Lewis, M. Hyperspectral Classification of Plants: A Review of Waveband Selection Generalisability. Remote Sens. 2020, 12, 113. [Google Scholar] [CrossRef]
- da Silva, A.R.; Demarchi, L.; Sikorska, D.; Sikorski, P.; Archiciński, P.; Jóźwiak, J.; Chormański, J. Multi-Source Remote Sensing Recognition of Plant Communities at the Reach Scale of the Vistula River, Poland. Ecol. Indic. 2022, 142, 109160. [Google Scholar] [CrossRef]
- Jurišić, M.; Radočaj, D.; Šiljeg, A.; Antonić, O.; Živić, T. Current Status and Perspective of Remote Sensing Application in Crop Management. J. Cent. Eur. Agric. 2021, 22, 156–166. [Google Scholar] [CrossRef]
- Leminen Madsen, S.; Mathiassen, S.K.; Dyrmann, M.; Laursen, M.S.; Paz, L.-C.; Jørgensen, R.N. Open Plant Phenotype Database of Common Weeds in Denmark. Remote Sens. 2020, 12, 1246. [Google Scholar] [CrossRef]
- Zhao, J.; Zhang, X.; Yan, J.; Qiu, X.; Yao, X.; Tian, Y.; Zhu, Y.; Cao, W. A Wheat Spike Detection Method in UAV Images Based on Improved YOLOv5. Remote Sens. 2021, 13, 3095. [Google Scholar] [CrossRef]
- Gerke, M.; Przybilla, H.-J. Accuracy Analysis of Photogrammetric UAV Image Blocks: Influence of Onboard RTK-GNSS and Cross Flight Patterns. Photogramm. Fernerkund. Geoinf. PFG 2016, 1, 17–30. [Google Scholar] [CrossRef]
- Rossi, P.; Mancini, F.; Dubbini, M.; Mazzone, F.; Capra, A. Combining Nadir and Oblique UAV Imagery to Reconstruct Quarry Topography: Methodology and Feasibility Analysis. Eur. J. Remote Sens. 2017, 50, 211–221. [Google Scholar] [CrossRef]
- Nesbit, P.R.; Hugenholtz, C.H. Enhancing UAV–SFM 3D Model Accuracy in High-Relief Landscapes by Incorporating Oblique Images. Remote Sens. 2019, 11, 239. [Google Scholar] [CrossRef]
- Aicardi, I.; Chiabrando, F.; Grasso, N.; Lingua, A.M.; Noardo, F.; Spanò, A. Uav Photogrammetry with Oblique Images: First Analysis on Data Acquisition and Processing. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 41, 835–842. [Google Scholar] [CrossRef]
- De Castro, A.I.; Torres-Sánchez, J.; Peña, J.M.; Jiménez-Brenes, F.M.; Csillik, O.; López-Granados, F. An Automatic Random Forest-OBIA Algorithm for Early Weed Mapping between and within Crop Rows Using UAV Imagery. Remote Sens. 2018, 10, 285. [Google Scholar] [CrossRef]
- Sa, I.; Popović, M.; Khanna, R.; Chen, Z.; Lottes, P.; Liebisch, F.; Nieto, J.; Stachniss, C.; Walter, A.; Siegwart, R. WeedMap: A Large-Scale Semantic Weed Mapping Framework Using Aerial Multispectral Imaging and Deep Neural Network for Precision Farming. Remote Sens. 2018, 10, 1423. [Google Scholar] [CrossRef]
- Liu, Y.-C.; Ma, C.-Y.; Kira, Z. Unbiased Teacher v2: Semi-Supervised Object Detection for Anchor-Free and Anchor-Based Detectors. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, LA, USA, 18–24 June 2022; pp. 9819–9828. [Google Scholar]
- Silverman, B.W. Using Kernel Density Estimates to Investigate Multimodality. J. R. Stat. Soc. Ser. B Methodol. 1981, 43, 97–99. [Google Scholar] [CrossRef]
- Štroner, M.; Urban, R.; Reindl, T.; Seidl, J.; Brouček, J. Evaluation of the Georeferencing Accuracy of a Photogrammetric Model Using a Quadrocopter with Onboard GNSS RTK. Sensors 2020, 20, 2318. [Google Scholar] [CrossRef] [PubMed]
- Tian, Z.; Shen, C.; Chen, H.; He, T. Fcos: Fully Convolutional One-Stage Object Detection. In Proceedings of the IEEE/CVF International Conference On Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9627–9636. [Google Scholar]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster R-Cnn: Towards Real-Time Object Detection with Region Proposal Networks. Adv. Neural Inf. Process. Syst. 2015, 28. [Google Scholar] [CrossRef]
- Bochkovskiy, A.; Wang, C.-Y.; Liao, H.-Y.M. Yolov4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Girshick, R.; Donahue, J.; Darrell, T.; Malik, J. Region-Based Convolutional Networks for Accurate Object Detection and Segmentation. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 38, 142–158. [Google Scholar] [CrossRef] [PubMed]
- Karras, G.E.; Patias, P.; Petsa, E. Digital Monoplotting and Photo-Unwrapping of Developable Surfaces in Architectural Photogrammetry. Int. Arch. Photogramm. Remote Sens. 1996, 31, 290–294. [Google Scholar]
- Likas, A.; Vlassis, N.; Verbeek, J.J. The Global K-Means Clustering Algorithm. Pattern Recognit. 2003, 36, 451–461. [Google Scholar] [CrossRef]
- Kohonen, T. The Self-Organizing Map. Proc. IEEE 1990, 78, 1464–1480. [Google Scholar] [CrossRef]
- Reynolds, D.A. Gaussian Mixture Models. Encycl. Biom. 2009, 741, 659–663. [Google Scholar]
- Fu, A.W.; Chan, P.M.; Cheung, Y.-L.; Moon, Y.S. Dynamic Vp-Tree Indexing for n-Nearest Neighbor Search given Pair-Wise Distances. VLDB J. 2000, 9, 154–173. [Google Scholar] [CrossRef]
- Results of Official Variety Trials 2015–2022. Available online: https://px.luke.fi:443/PxWebPxWeb/pxweb/en/maatalous/maatalous__lajikekokeet__julkaisuvuosi_2022__sato__kaura/150100sato_kaura.px/ (accessed on 30 May 2023).
- Viljelykasvien Sato Muuttujina Vuosi, ELY-Keskus, Tieto, Tuotantotapa Ja Kasvilaji. Available online: https://statdb.luke.fi/PxWeb/pxweb/fi/LUKE/LUKE__02%20Maatalous__04%20Tuotanto__14%20Satotilasto/01_Viljelykasvien_sato.px/ (accessed on 30 May 2023).
- Cutugno, M.; Robustelli, U.; Pugliano, G. Structure-from-Motion 3d Reconstruction of the Historical Overpass Ponte Della Cerra: A Comparison between Micmac® Open Source Software and Metashape®. Drones 2022, 6, 242. [Google Scholar] [CrossRef]
- Markomanolis, G.S.; Alpay, A.; Young, J.; Klemm, M.; Malaya, N.; Esposito, A.; Heikonen, J.; Bastrakov, S.; Debus, A.; Kluge, T. Evaluating GPU Programming Models for the LUMI Supercomputer. In Proceedings of the Supercomputing Frontiers: 7th Asian Conference, SCFA 2022, Singapore, 1–3 March 2022; Springer International Publishing: Cham, Switzerland, 2022; pp. 79–101. [Google Scholar]
- Iserte, S.; Prades, J.; Reaño, C.; Silla, F. Increasing the Performance of Data Centers by Combining Remote GPU Virtualization with Slurm. In Proceedings of the 2016 16th IEEE/ACM International Symposium on Cluster, Cloud and Grid Computing (CCGrid), Cartagena, Colombia, 16–19 May 2016; pp. 98–101. [Google Scholar]
- Warmerdam, F. The Geospatial Data Abstraction Library. In Open Source Approaches in Spatial Data Handling; Spinger: Berlin/Heidelberg, Germany, 2008; pp. 87–104. [Google Scholar]
- Grandini, M.; Bagli, E.; Visani, G. Metrics for Multi-Class Classification: An Overview. arXiv 2020, arXiv:200805756. [Google Scholar]
- Henderson, P.; Ferrari, V. End-to-End Training of Object Class Detectors for Mean Average Precision. In Proceedings of the Computer Vision–ACCV 2016: 13th Asian Conference on Computer Vision, Taipei, Taiwan, 20–24 November 2016, Revised Selected Papers, Part V 13; Springer: Berlin/Heidelberg, Germany, 2017; pp. 198–213. [Google Scholar]
- Zhang, C.; Cheng, J.; Tian, Q. Unsupervised and Semi-Supervised Image Classification with Weak Semantic Consistency. IEEE Trans. Multimed. 2019, 21, 2482–2491. [Google Scholar] [CrossRef]
- Liu, B.; Yu, X.; Zhang, P.; Tan, X.; Yu, A.; Xue, Z. A Semi-Supervised Convolutional Neural Network for Hyperspectral Image Classification. Remote Sens. Lett. 2017, 8, 839–848. [Google Scholar] [CrossRef]
- GitHub—Ultralytics/Ultralytics: NEW—YOLOv8 🚀 in PyTorch > ONNX > CoreML > TFLite. Available online: https://github.com/ultralytics/ultralytics (accessed on 30 May 2023).




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Unlabeled Data | AP50 | AR50 |
|---|---|---|---|
| Train | No | 95.2% | 99.6% |
| Train | Yes | 97.7% | 100.0% |
| Test | No | 94.5% | 98.0% |
| Test | Yes | 95.8% | 98.3% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Khoramshahi, E.; Näsi, R.; Rua, S.; Oliveira, R.A.; Päivänsalo, A.; Niemeläinen, O.; Niskanen, M.; Honkavaara, E. A Novel Deep Multi-Image Object Detection Approach for Detecting Alien Barleys in Oat Fields Using RGB UAV Images. Remote Sens. 2023, 15, 3582. https://doi.org/10.3390/rs15143582
Khoramshahi E, Näsi R, Rua S, Oliveira RA, Päivänsalo A, Niemeläinen O, Niskanen M, Honkavaara E. A Novel Deep Multi-Image Object Detection Approach for Detecting Alien Barleys in Oat Fields Using RGB UAV Images. Remote Sensing. 2023; 15(14):3582. https://doi.org/10.3390/rs15143582
Chicago/Turabian StyleKhoramshahi, Ehsan, Roope Näsi, Stefan Rua, Raquel A. Oliveira, Axel Päivänsalo, Oiva Niemeläinen, Markku Niskanen, and Eija Honkavaara. 2023. "A Novel Deep Multi-Image Object Detection Approach for Detecting Alien Barleys in Oat Fields Using RGB UAV Images" Remote Sensing 15, no. 14: 3582. https://doi.org/10.3390/rs15143582
APA StyleKhoramshahi, E., Näsi, R., Rua, S., Oliveira, R. A., Päivänsalo, A., Niemeläinen, O., Niskanen, M., & Honkavaara, E. (2023). A Novel Deep Multi-Image Object Detection Approach for Detecting Alien Barleys in Oat Fields Using RGB UAV Images. Remote Sensing, 15(14), 3582. https://doi.org/10.3390/rs15143582