

Tree Stem Detection and Crown Delineation in a Structurally Diverse Deciduous Forest Combining Leaf-On and Leaf-Off UAV-SfM Data
 ,
,  , ,
, , 
Abstract
:1. Introduction
1.1. UAV Imagery Processing Using Structure from Motion
1.2. UAV-Data-Based Products for Tree Crown Delineation
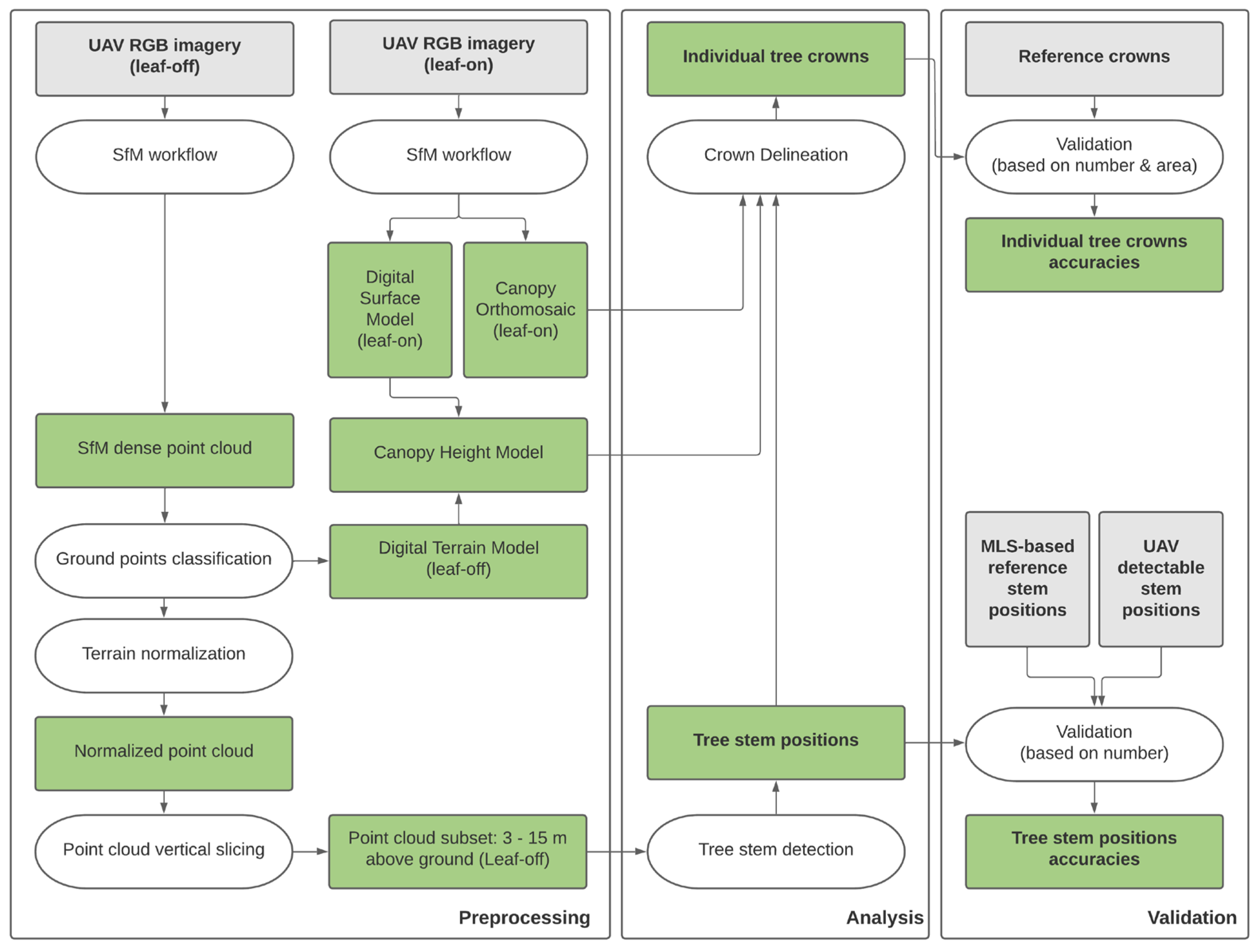
2. Materials and Methods
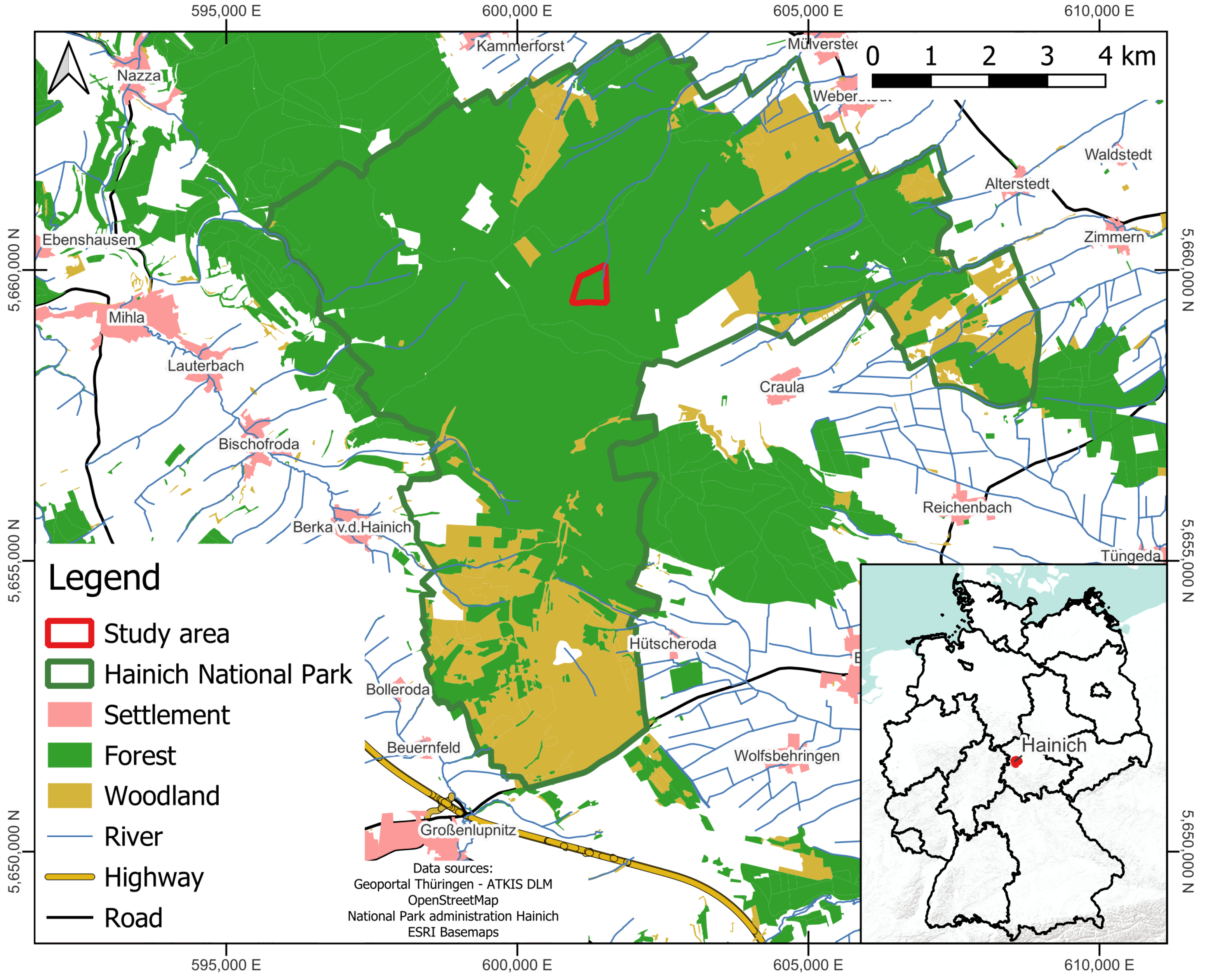
2.1. Study Site Hainich National Park
2.2. Acquisition and Preprocessing of UAV Imagery
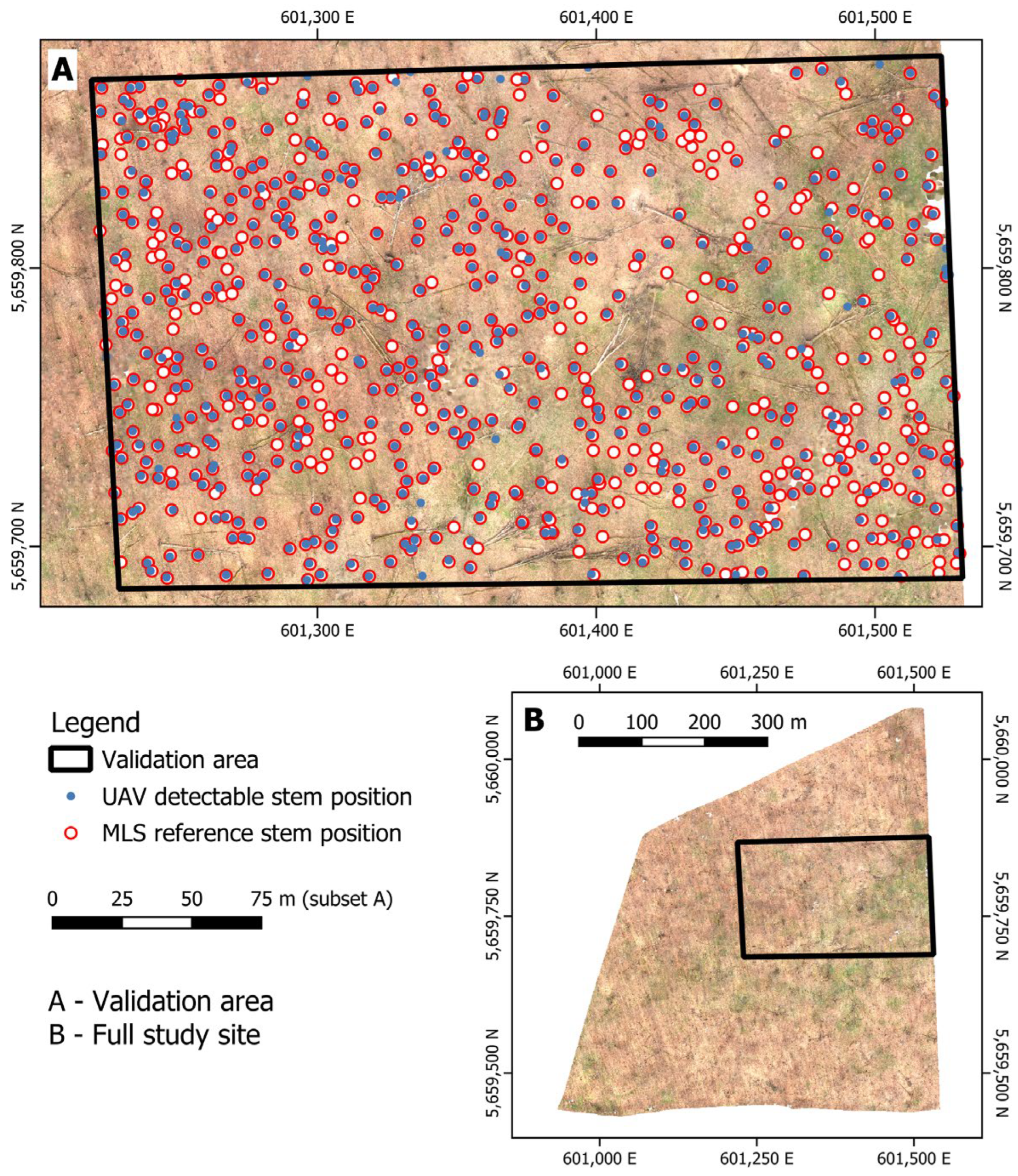
2.3. Reference Data
- (a)
- Inventory by the Hainich National Park administration
- (b)
- Stem co-ordinates
- (c)
- Crown shapes
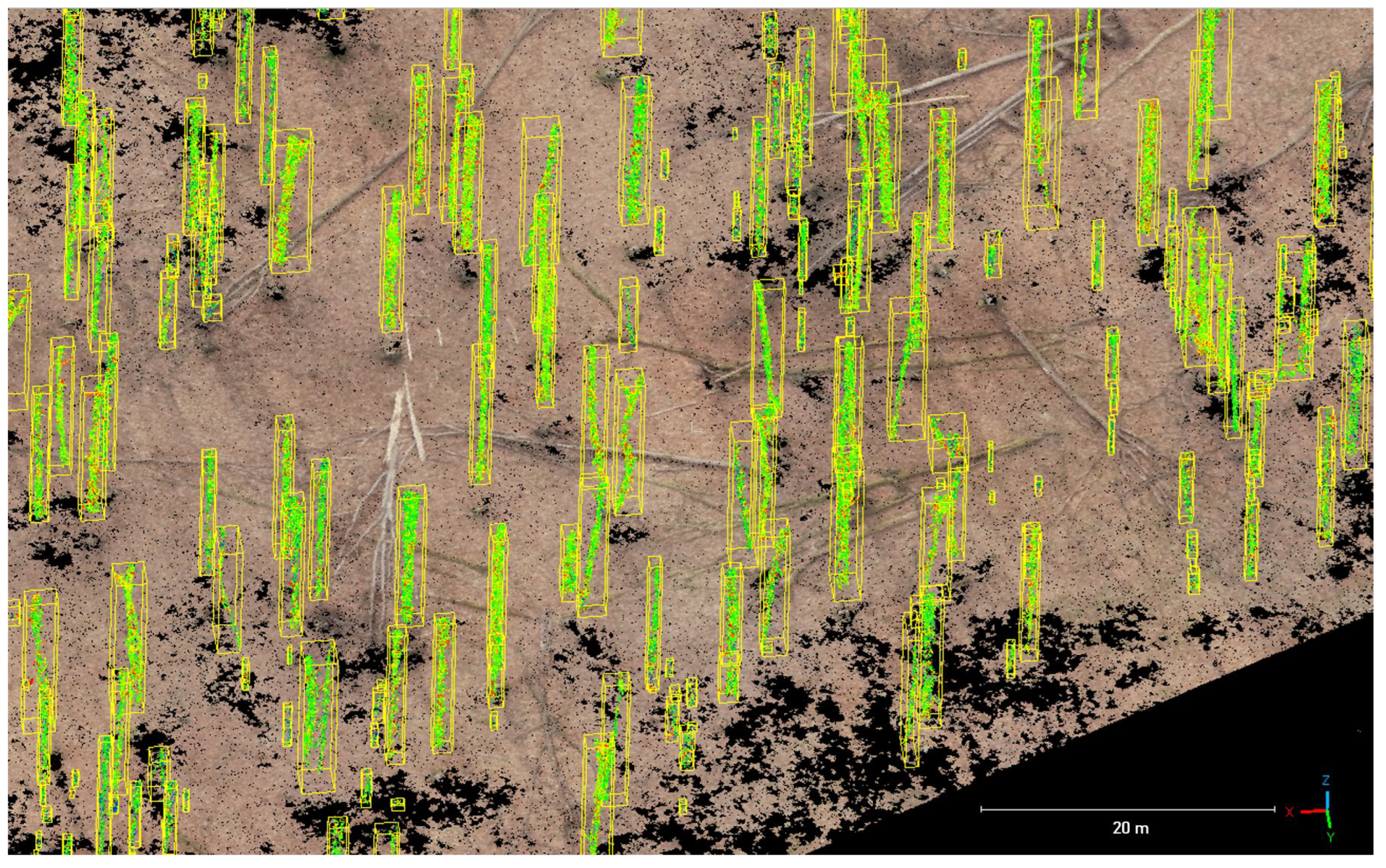
2.4. Method for Automatic Detection of Stem Coordinates
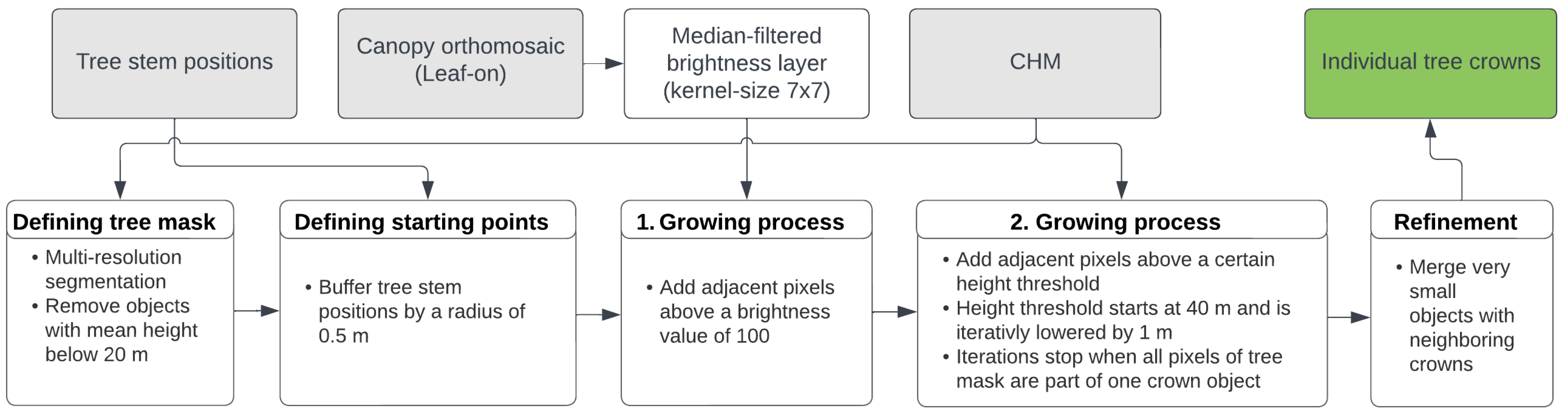
2.5. Method for Automatic Delineation of Tree Crown Shapes
2.6. Accuracy Assessment
- (a)
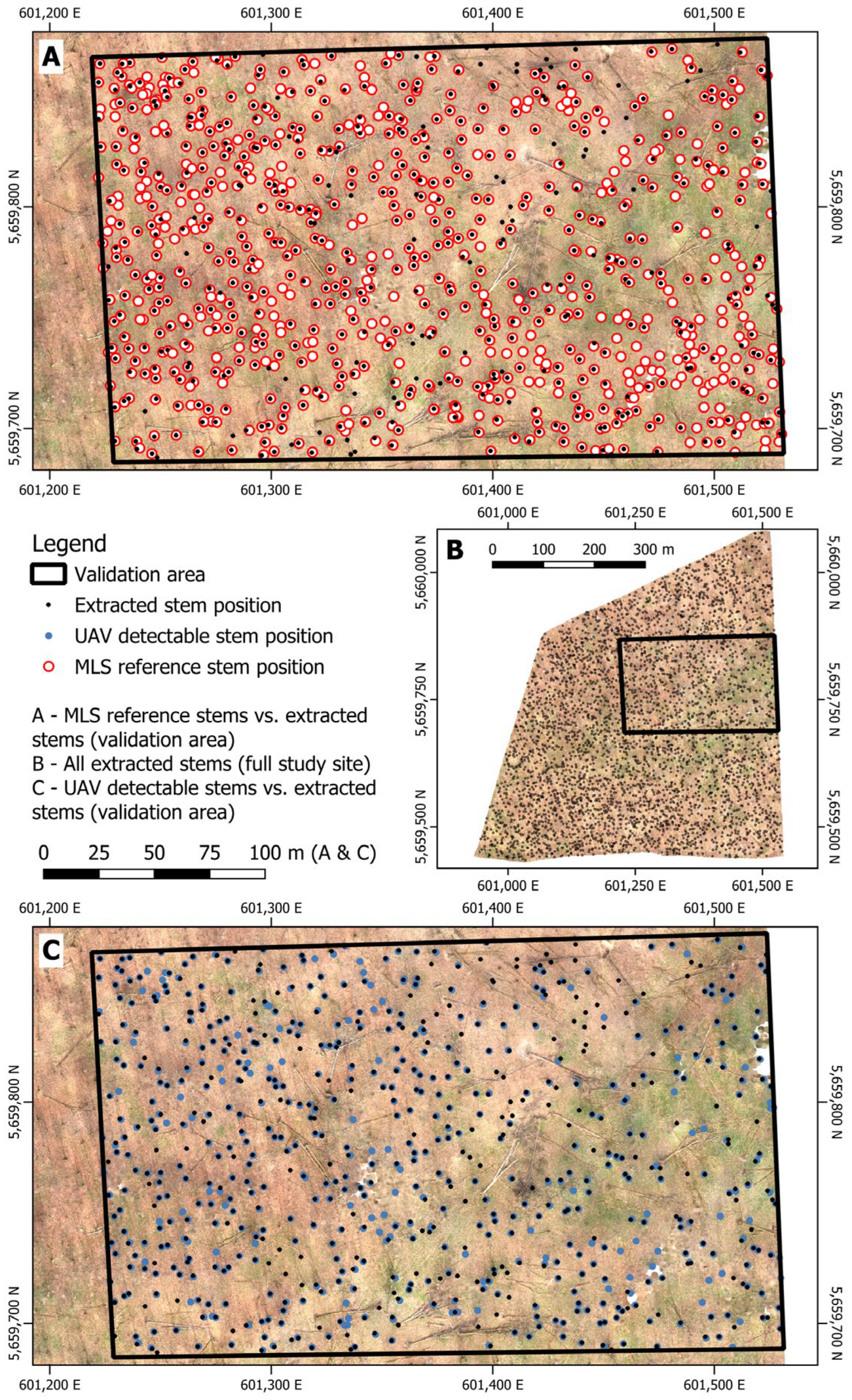
- Stem detection
- (b)
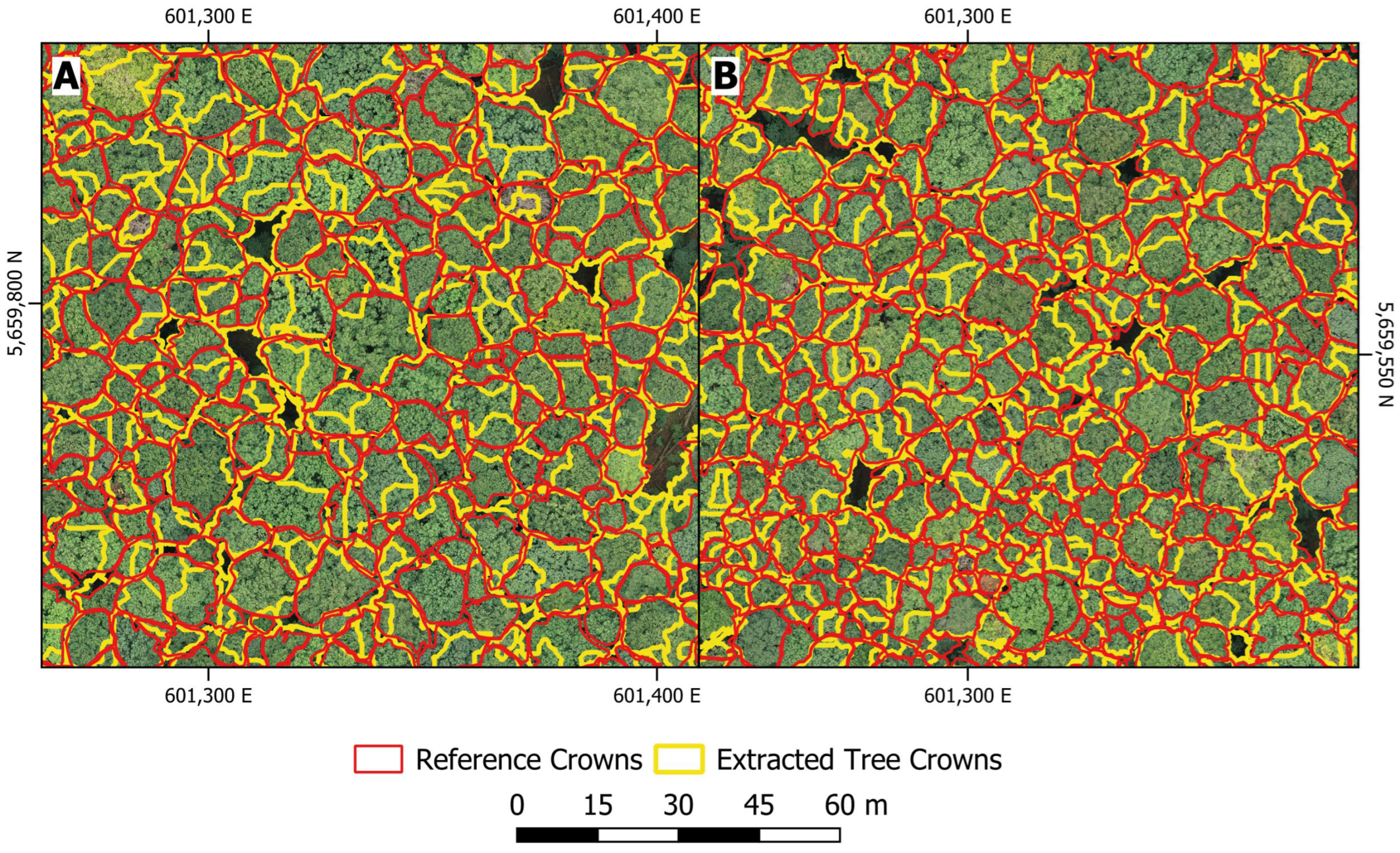
- Crown delineation
3. Results
3.1. Stem Detection
3.2. Crown Delineation
4. Discussion
4.1. Stem Detection
4.2. Crown Delineation
4.3. Combination of Leaf-off and Leaf-on UAV Data to Model Forest Structure
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AMS | Adaptive-kernel bandwidth Mean-Shift |
| CHM | Canopy Height Model |
| CNN | Convolutional Neural Network |
| DBH | Diameter at Breast Height |
| DSM | Digital Surface Model |
| DTM | Digital Terrain Model |
| FMS | Fixed-kernel bandwidth Mean-Shift |
| FN | False Negative |
| FP | False Positive |
| IoU | Intersection over Union |
| ISO | International Organization for Standardization |
| ITCD | Individual Tree Crown Delineation |
| LCC | Label Connected Components |
| LiDAR | Light Detection and Ranging |
| MLS | Mobile Laser Scanning |
| RGB | Red Green Blue |
| RMSE | Root Mean Square Error |
| RTK | Real-Time Kinematic |
| SfM | Structure from Motion |
| SOR | Statistical Outlier Filter |
| SSD | Single Shot Detector |
| TP | True Positive |
| UAV | Unoccupied Aerial Vehicle |
| VWF | Variable Window Filter |
References
- Fassnacht, F.E.; White, J.C.; Wulder, M.A.; Næsset, E. Remote sensing in forestry: Current challenges, considerations and directions. For. Int. J. For. Res. 2023, cpad024. [Google Scholar] [CrossRef]
- Hansen, M.C.; Potapov, P.V.; Moore, R.; Hancher, M.; Turubanova, S.A.; Tyukavina, A.; Thau, D.; Stehman, S.V.; Goetz, S.J.; Loveland, T.R.; et al. High-resolution global maps of 21st-century forest cover change. Science 2013, 342, 850–853. [Google Scholar] [CrossRef]
- Thonfeld, F.; Gessner, U.; Holzwarth, S.; Kriese, J.; da Ponte, E.; Huth, J.; Kuenzer, C. A First Assessment of Canopy Cover Loss in Germany’s Forests after the 2018–2020 Drought Years. Remote Sens. 2022, 14, 562. [Google Scholar] [CrossRef]
- Zuidema, P.A.; van der Sleen, P. Seeing the forest through the trees: How tree-level measurements can help understand forest dynamics. New Phytol. 2022, 234, 1544–1546. [Google Scholar] [CrossRef]
- Almeida, C.; Maurano, L.; Valeriano, D.; Câmara, G.; Vinhas, L.; Gomes, A.; Monteiro, A.; Souza, A.; Rennó, C.; e Silva, D.; et al. Methodology for Forest Monitoring Used in PRODES and DETER Projects; Instituto Nacional de Pesquisas Espaciais (INPE): São José dos Campos, Brazil, 2021. [Google Scholar]
- De Conto, T.; Olofsson, K.; Görgens, E.B.; Rodriguez, L.C.E.; Almeida, G. Performance of stem denoising and stem modelling algorithms on single tree point clouds from terrestrial laser scanning. Comput. Electron. Agric. 2017, 143, 165–176. [Google Scholar] [CrossRef]
- Yépez-Rincón, F.D.; Luna-Mendoza, L.; Ramírez-Serrato, N.L.; Hinojosa-Corona, A.; Ferriño-Fierro, A.L. Assessing vertical structure of an endemic forest in succession using terrestrial laser scanning (TLS). Case study: Guadalupe Island. Remote Sens. Environ. 2021, 263, 112563. [Google Scholar] [CrossRef]
- Kuželka, K.; Slavík, M.; Surový, P. Very High Density Point Clouds from UAV Laser Scanning for Automatic Tree Stem Detection and Direct Diameter Measurement. Remote Sens. 2020, 12, 1236. [Google Scholar] [CrossRef]
- Chen, Q.; Gao, T.; Zhu, J.; Wu, F.; Li, X.; Lu, D.; Yu, F. Individual Tree Segmentation and Tree Height Estimation Using Leaf-Off and Leaf-On UAV-LiDAR Data in Dense Deciduous Forests. Remote Sens. 2022, 14, 2787. [Google Scholar] [CrossRef]
- Yao, H.; Qin, R.; Chen, X. Unmanned Aerial Vehicle for Remote Sensing Applications—A Review. Remote Sens. 2019, 11, 1443. [Google Scholar] [CrossRef]
- Thiel, C.; Müller, M.M.; Berger, C.; Cremer, F.; Dubois, C.; Hese, S.; Baade, J.; Klan, F.; Pathe, C. Monitoring Selective Logging in a Pine-Dominated Forest in Central Germany with Repeated Drone Flights Utilizing a Low Cost RTK Quadcopter. Drones 2020, 4, 11. [Google Scholar] [CrossRef]
- Johansen, K.; Raharjo, T.; McCabe, M. Using Multi-Spectral UAV Imagery to Extract Tree Crop Structural Properties and Assess Pruning Effects. Remote Sens. 2018, 10, 854. [Google Scholar] [CrossRef]
- Dainelli, R.; Toscano, P.; Di Gennaro, S.F.; Matese, A. Recent Advances in Unmanned Aerial Vehicle Forest Remote Sensing—A Systematic Review. Part I: A General Framework. Forests 2021, 12, 327. [Google Scholar] [CrossRef]
- Torresan, C.; Berton, A.; Carotenuto, F.; Di Gennaro, S.F.; Gioli, B.; Matese, A.; Miglietta, F.; Vagnoli, C.; Zaldei, A.; Wallace, L. Forestry applications of UAVs in Europe: A review. Int. J. Remote Sens. 2017, 38, 2427–2447. [Google Scholar] [CrossRef]
- Ahmadi, P.; Mansor, S.; Farjad, B.; Ghaderpour, E. Unmanned Aerial Vehicle (UAV)-Based Remote Sensing for Early-Stage Detection of Ganoderma. Remote Sens. 2022, 14, 1239. [Google Scholar] [CrossRef]
- Jiang, S.; Jiang, C.; Jiang, W. Efficient structure from motion for large-scale UAV images: A review and a comparison of SfM tools. ISPRS J. Photogramm. Remote Sens. 2020, 167, 230–251. [Google Scholar] [CrossRef]
- Schonberger, J.L.; Frahm, J.-M. Structure-from-Motion Revisited. In Proceedings of the 29th IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2016, Las Vegas, NV, USA, 26 June–1 July 2016; pp. 4104–4113, ISBN 978-1-4673-8851-1. [Google Scholar]
- Deluzet, M.; Erudel, T.; Briottet, X.; Sheeren, D.; Fabre, S. Individual Tree Crown Delineation Method Based on Multi-Criteria Graph Using Geometric and Spectral Information: Application to Several Temperate Forest Sites. Remote Sens. 2022, 14, 1083. [Google Scholar] [CrossRef]
- Zhen, Z.; Quackenbush, L.; Zhang, L. Trends in Automatic Individual Tree Crown Detection and Delineation—Evolution of LiDAR Data. Remote Sens. 2016, 8, 333. [Google Scholar] [CrossRef]
- Ke, Y.; Quackenbush, L.J. A review of methods for automatic individual tree-crown detection and delineation from passive remote sensing. Int. J. Remote Sens. 2011, 32, 4725–4747. [Google Scholar] [CrossRef]
- Wang, L.; Gong, P.; Biging, G.S. Individual Tree-Crown Delineation and Treetop Detection in High-Spatial-Resolution Aerial Imagery. Photogramm. Eng. Remote Sens. 2004, 70, 351–357. [Google Scholar] [CrossRef]
- Tochon, G.; Féret, J.B.; Valero, S.; Martin, R.E.; Knapp, D.E.; Salembier, P.; Chanussot, J.; Asner, G.P. On the use of binary partition trees for the tree crown segmentation of tropical rainforest hyperspectral images. Remote Sens. Environ. 2015, 159, 318–331. [Google Scholar] [CrossRef]
- Workie, T.G. Estimating forest above-ground carbon using object-based analysis of very high spatial resolution satellite images. Afr. J. Environ. Sci. Technol. 2017, 11, 587–600. [Google Scholar] [CrossRef]
- Lindberg, E.; Holmgren, J. Individual Tree Crown Methods for 3D Data from Remote Sensing. Curr. Forestry Rep. 2017, 3, 19–31. [Google Scholar] [CrossRef]
- Erikson, M.; Olofsson, K. Comparison of three individual tree crown detection methods. Mach. Vis. Appl. 2005, 16, 258–265. [Google Scholar] [CrossRef]
- Hirschmugl, M.; Ofner, M.; Raggam, J.; Schardt, M. Single tree detection in very high resolution remote sensing data. Remote Sens. Environ. 2007, 110, 533–544. [Google Scholar] [CrossRef]
- Ottoy, S.; Tziolas, N.; van Meerbeek, K.; Aravidis, I.; Tilkin, S.; Sismanis, M.; Stavrakoudis, D.; Gitas, I.Z.; Zalidis, G.; de Vocht, A. Effects of Flight and Smoothing Parameters on the Detection of Taxus and Olive Trees with UAV-Borne Imagery. Drones 2022, 6, 197. [Google Scholar] [CrossRef]
- Wulder, M.; Niemann, K.; Goodenough, D.G. Local Maximum Filtering for the Extraction of Tree Locations and Basal Area from High Spatial Resolution Imagery. Remote Sens. Environ. 2000, 73, 103–114. [Google Scholar] [CrossRef]
- Gougeon, F.A. A Crown-Following Approach to the Automatic Delineation of Individual Tree Crowns in High Spatial Resolution Aerial Images. Can. J. Remote Sens. 1995, 21, 274–284. [Google Scholar] [CrossRef]
- Gougeon, F.A.; Leckie, D.G. The Individual Tree Crown Approach Applied to Ikonos Images of a Coniferous Plantation Area. Photogramm. Eng. Remote Sens. 2006, 72, 1287–1297. [Google Scholar] [CrossRef]
- Beucher, S.; Lantuéjoul, C. Use of Watersheds in Contour Detection. In Proceedings of the International Workshop on Image Processing: Real-time Edge and Motion Detection/Estimation, Rennes, France, 17–21 September 1979. [Google Scholar]
- Derivaux, S.; Forestier, G.; Wemmert, C.; Lefèvre, S. Supervised image segmentation using watershed transform, fuzzy classification and evolutionary computation. Pattern Recognit. Lett. 2010, 31, 2364–2374. [Google Scholar] [CrossRef]
- Olofsson, K.; Wallerman, J.; Holmgren, J.; Olsson, H. Tree species discrimination using Z/I DMC imagery and template matching of single trees. Scand. J. For. Res. 2006, 21, 106–110. [Google Scholar] [CrossRef]
- Zhao, H.; Morgenroth, J.; Pearse, G.; Schindler, J. A Systematic Review of Individual Tree Crown Detection and Delineation with Convolutional Neural Networks (CNN). Curr. Forestry Rep. 2023, 9, 149–170. [Google Scholar] [CrossRef]
- Yu, K.; Hao, Z.; Post, C.J.; Mikhailova, E.A.; Lin, L.; Zhao, G.; Tian, S.; Liu, J. Comparison of Classical Methods and Mask R-CNN for Automatic Tree Detection and Mapping Using UAV Imagery. Remote Sens. 2022, 14, 295. [Google Scholar] [CrossRef]
- Freudenberg, M.; Magdon, P.; Nölke, N. Individual tree crown delineation in high-resolution remote sensing images based on U-Net. Neural Comput. Applic. 2022, 34, 22197–22207. [Google Scholar] [CrossRef]
- Dalponte, M.; Frizzera, L.; Gianelle, D. Individual tree crown delineation and tree species classification with hyperspectral and LiDAR data. PeerJ 2019, 6, e6227. [Google Scholar] [CrossRef] [PubMed]
- Weiser, H.; Schäfer, J.; Winiwarter, L.; Krašovec, N.; Fassnacht, F.E.; Höfle, B. Individual tree point clouds and tree measurements from multi-platform laser scanning in German forests. Earth Syst. Sci. Data 2022, 14, 2989–3012. [Google Scholar] [CrossRef]
- Chen, X.; Jiang, K.; Zhu, Y.; Wang, X.; Yun, T. Individual Tree Crown Segmentation Directly from UAV-Borne LiDAR Data Using the PointNet of Deep Learning. Forests 2021, 12, 131. [Google Scholar] [CrossRef]
- Xiao, W.; Zaforemska, A.; Smigaj, M.; Wang, Y.; Gaulton, R. Mean Shift Segmentation Assessment for Individual Forest Tree Delineation from Airborne Lidar Data. Remote Sens. 2019, 11, 1263. [Google Scholar] [CrossRef]
- Qi, C.R.; Su, H.; Mo, K.; Guibas, L.J. PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. arXiv 2016, arXiv:1612.00593. [Google Scholar]
- Swayze, N.C.; Tinkham, W.T.; Vogeler, J.C.; Hudak, A.T. Influence of flight parameters on UAS-based monitoring of tree height, diameter, and density. Remote Sens. Environ. 2021, 263, 112540. [Google Scholar] [CrossRef]
- Miraki, M.; Sohrabi, H.; Fatehi, P.; Kneubuehler, M. Individual tree crown delineation from high-resolution UAV images in broadleaf forest. Ecol. Inform. 2021, 61, 101207. [Google Scholar] [CrossRef]
- Guerra-Hernández, J.; Cosenza, D.N.; Rodriguez, L.C.E.; Silva, M.; Tomé, M.; Díaz-Varela, R.A.; González-Ferreiro, E. Comparison of ALS- and UAV(SfM)-derived high-density point clouds for individual tree detection in Eucalyptus plantations. Int. J. Remote Sens. 2018, 39, 5211–5235. [Google Scholar] [CrossRef]
- Young, D.J.N.; Koontz, M.J.; Weeks, J. Optimizing aerial imagery collection and processing parameters for drone-based individual tree mapping in structurally complex conifer forests. Methods Ecol. Evol. 2022, 13, 1447–1463. [Google Scholar] [CrossRef]
- Mohan, M.; Leite, R.V.; Broadbent, E.N.; Wan Mohd Jaafar, W.S.; Srinivasan, S.; Bajaj, S.; Dalla Corte, A.P.; do Amaral, C.H.; Gopan, G.; Saad, S.N.M.; et al. Individual tree detection using UAV-lidar and UAV-SfM data: A tutorial for beginners. Open Geosci. 2021, 13, 1028–1039. [Google Scholar] [CrossRef]
- Komárek, J.; Klápště, P.; Hrach, K.; Klouček, T. The Potential of Widespread UAV Cameras in the Identification of Conifers and the Delineation of Their Crowns. Forests 2022, 13, 710. [Google Scholar] [CrossRef]
- Mohan, M.; Silva, C.; Klauberg, C.; Jat, P.; Catts, G.; Cardil, A.; Hudak, A.; Dia, M. Individual Tree Detection from Unmanned Aerial Vehicle (UAV) Derived Canopy Height Model in an Open Canopy Mixed Conifer Forest. Forests 2017, 8, 340. [Google Scholar] [CrossRef]
- Lei, L.; Yin, T.; Chai, G.; Li, Y.; Wang, Y.; Jia, X.; Zhang, X. A novel algorithm of individual tree crowns segmentation considering three-dimensional canopy attributes using UAV oblique photos. Int. J. Appl. Earth Obs. Geoinf. 2022, 112, 102893. [Google Scholar] [CrossRef]
- Pleșoianu, A.-I.; Stupariu, M.-S.; Șandric, I.; Pătru-Stupariu, I.; Drăguț, L. Individual Tree-Crown Detection and Species Classification in Very High-Resolution Remote Sensing Imagery Using a Deep Learning Ensemble Model. Remote Sens. 2020, 12, 2426. [Google Scholar] [CrossRef]
- Chadwick, A.J.; Goodbody, T.R.H.; Coops, N.C.; Hervieux, A.; Bater, C.W.; Martens, L.A.; White, B.; Röeser, D. Automatic Delineation and Height Measurement of Regenerating Conifer Crowns under Leaf-Off Conditions Using UAV Imagery. Remote Sens. 2020, 12, 4104. [Google Scholar] [CrossRef]
- Qin, H.; Zhou, W.; Yao, Y.; Wang, W. Individual tree segmentation and tree species classification in subtropical broadleaf forests using UAV-based LiDAR, hyperspectral, and ultrahigh-resolution RGB data. Remote Sens. Environ. 2022, 280, 113143. [Google Scholar] [CrossRef]
- Wang, Y.; Yang, X.; Zhang, L.; Fan, X.; Ye, Q.; Fu, L. Individual tree segmentation and tree-counting using supervised clustering. Comput. Electron. Agric. 2023, 205, 107629. [Google Scholar] [CrossRef]
- Copernicus Land Monitoring Service. Tree Cover Density. 2018. Available online: https://land.copernicus.eu/pan-european/high-resolution-layers/forests/tree-cover-density (accessed on 12 December 2022).
- Huss, J.; Butler-Manning, D. Entwicklungsdynamik eines buchendominierten „Naturwald“-Dauerbeobachtungsbestands auf Kalk im Nationalpark Hainich/Thüringen. Wald. Online 2006, 3, 67–81. [Google Scholar]
- Fritzlar, D.; Henkel, A.; Profft, I. Einführung in den Naturraum. In Exkursionsführer. Wissenschaft im Hainich; Hainich-Tagung, Bad Langensalza, 27–29 April; Nationalparkverwaltung Hainich: Gotha, Germany, 2016; pp. 5–11. [Google Scholar]
- Schramm, H. Naturräumliche Gliederung der Exkursionsgebiete. In Exkursionsführer zur Tagung der AG Forstliche Standorts- und Vegetationskunde vom 18. bis 21. Mai 2005 in Thüringen; Thüringer Landesanstalt für Wald, Jagd und Fischerei: Gotha, Germany, 2005; pp. 8–19. [Google Scholar]
- Nationale Naturlandschaften. Thüringer Gesetz über den Nationalpark Hainich: ThürNPHG; Nationale Naturlandschaften: Berlin, Germany, 1997. [Google Scholar]
- Biehl, R. Der Nationalpark Hainich "Urwald mitten in Deutschland". In Exkursionsführer zur Tagung der AG Forstliche Standorts- und Vegetationskunde vom 18. bis 21. Mai 2005 in Thüringen; Thüringer Landesanstalt für Wald, Jagd und Fischerei: Gotha, Germany, 2005; pp. 44–47. [Google Scholar]
- Henkel, A.; Hese, S.; Thiel, C. Erhöhte Buchenmortalität im Nationalpark Hainich? AFZ—Der Wald. 2021, 3, 26–29. [Google Scholar]
- DJI. DJI Phantom 4 RTK: User Manual v1.4; DJI: Shenzen, China, 2018. [Google Scholar]
- Knohl, A.; Schulze, E.-D.; Kolle, O.; Buchmann, N. Large carbon uptake by an unmanaged 250-year-old deciduous forest in Central Germany. Agric. For. Meteorol. 2003, 118, 151–167. [Google Scholar] [CrossRef]
- Thiel, C.; Mueller, M.M.; Epple, L.; Thau, C.; Hese, S.; Voltersen, M.; Henkel, A. UAS Imagery-Based Mapping of Coarse Wood Debris in a Natural Deciduous Forest in Central Germany (Hainich National Park). Remote Sens. 2020, 12, 3293. [Google Scholar] [CrossRef]
- Kraft, G. Beiträge zur Lehre von den Durchforstungen, Schlagstellungen und Lichtungshieben; Klindworth: Hannover, Germany, 1884. [Google Scholar]
- Ye, Z.; Wei, J.; Lin, Y.; Guo, Q.; Zhang, J.; Zhang, H.; Deng, H.; Yang, K. Extraction of Olive Crown Based on UAV Visible Images and the U2-Net Deep Learning Model. Remote Sens. 2022, 14, 1523. [Google Scholar] [CrossRef]
- Braga, G.J.R.; Peripato, V.; Dalagnol, R.; Ferreira, P.M.; Tarabalka, Y.; Aragão, O.C.L.E.; de Campos Velho, F.H.; Shiguemori, E.H.; Wagner, F.H. Tree Crown Delineation Algorithm Based on a Convolutional Neural Network. Remote Sens. 2020, 12, 1288. [Google Scholar] [CrossRef]
- Weinstein, B.G.; Marconi, S.; Bohlman, S.; Zare, A.; White, E. Individual Tree-Crown Detection in RGB Imagery Using Semi-Supervised Deep Learning Neural Networks. Remote Sens. 2019, 11, 1309. [Google Scholar] [CrossRef]
- Hese, S. Oblique and Cross-Grid UAV Imaging Flight Plans—A Sneak Preview of the Analysis of Resulting 3D Point Cloud Properties for Deciduous Forest Surfaces—Low Cost 3D Mapping with the Phantom 4R (RTK). 2022. Available online: https://jenacopterlabs.de/?p=1711 (accessed on 10 July 2023).
- Harikumar, A.; D’Odorico, P.; Ensminger, I. Combining Spectral, Spatial-Contextual, and Structural Information in Multispectral UAV Data for Spruce Crown Delineation. Remote Sens. 2022, 14, 2044. [Google Scholar] [CrossRef]
- Thiel, C.; Schmullius, C. Comparison of UAV photograph-based and airborne lidar-based point clouds over forest from a forestry application perspective. Int. J. Remote Sens. 2017, 38, 2411–2426. [Google Scholar] [CrossRef]
- Ghanbari Parmehr, E.; Amati, M. Individual Tree Canopy Parameters Estimation Using UAV-Based Photogrammetric and LiDAR Point Clouds in an Urban Park. Remote Sens. 2021, 13, 2062. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Malenovský, Z.; Turner, D.; Vopěnka, P. Assessment of Forest Structure Using Two UAV Techniques: A Comparison of Airborne Laser Scanning and Structure from Motion (SfM) Point Clouds. Forests 2016, 7, 62. [Google Scholar] [CrossRef]
- Lassalle, G.; Ferreira, M.P.; La Rosa, L.E.C.; de Souza Filho, C.R. Deep learning-based individual tree crown delineation in mangrove forests using very-high-resolution satellite imagery. ISPRS J. Photogramm. Remote Sens. 2022, 189, 220–235. [Google Scholar] [CrossRef]
- Ni, W.; Dong, J.; Sun, G.; Zhang, Z.; Pang, Y.; Tian, X.; Li, Z.; Chen, E. Synthesis of Leaf-on and Leaf-off Unmanned Aerial Vehicle (UAV) Stereo Imagery for the Inventory of Aboveground Biomass of Deciduous Forests. Remote Sens. 2019, 11, 889. [Google Scholar] [CrossRef]
- Nasiri, V.; Darvishsefat, A.A.; Arefi, H.; Pierrot-Deseilligny, M.; Namiranian, M.; Le Bris, A. Unmanned aerial vehicles (UAV)-based canopy height modeling under leaf-on and leaf-off conditions for determining tree height and crown diameter (case study: Hyrcanian mixed forest). Can. J. For. Res. 2021, 51, 962–971. [Google Scholar] [CrossRef]
- Moudrý, V.; Gdulová, K.; Fogl, M.; Klápště, P.; Urban, R.; Komárek, J.; Moudrá, L.; Štroner, M.; Barták, V.; Solský, M. Comparison of leaf-off and leaf-on combined UAV imagery and airborne LiDAR for assessment of a post-mining site terrain and vegetation structure: Prospects for monitoring hazards and restoration success. Appl. Geogr. 2019, 104, 32–41. [Google Scholar] [CrossRef]
- Kuželka, K.; Surový, P. Mapping Forest Structure Using UAS inside Flight Capabilities. Sensors 2018, 18, 2245. [Google Scholar] [CrossRef] [PubMed]
- Krisanski, S.; Taskhiri, M.; Turner, P. Enhancing Methods for Under-Canopy Unmanned Aircraft System Based Photogrammetry in Complex Forests for Tree Diameter Measurement. Remote Sens. 2020, 12, 1652. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Paper | Forest Characteristics | UAV Imagery Type | Camera Angle | Tree Detection Algorithm | Crown Delineation Algorithm | Description |
|---|---|---|---|---|---|---|
| [42] | Dry conifer forest, low tree density | DJI Phantom 4 Pro (RGB) | Nadir & oblique | Local maxima on CHM | - | Various flight altitudes, patterns, and camera angles were tested, and better accuracy values were achieved by combining crosshatch flight patterns with nadir camera angles. The maximum F-score values ranged between 0.429 and 0.771. |
| [43] | Broadleaf forest, test sites with different stand densities | DJI Phantom 4 Pro (RGB) | Nadir | Local maxima on CHM | Region growing + inverse watershed segmentation | The highest overall accuracy (F-score = 0.79) was obtained for the low-density stand by applying a region growing algorithm on the CHM. Accuracy also varied among different tree species, with the best results obtained for Caspian poplar and the lowest for Persian ironwood. In high-density stands, the crown delineation results could be improved by applying weak gaussian filtering to the CHM. |
| [44] | Mixed conifer forest, open canopy | DJI Phantom 3 (RGB) | Nadir | Local maxima on CHM | - | Fixed window sizes were used in the local maxima filter, and it was observed that accuracy decreased as the filter sizes exceeded 1 × 1 m. Challenges in tree detection were specifically noted in steep areas and regions with high canopy closure. DTMs obtained through SfM tended to overestimate height in dense vegetation in comparison to DTMs derived from airborne laser scanning. |
| [45] | Mixed-conifer forest, moderate density | DJI Phantom 4 (RGB) | Nadir, oblique & composite | Variable window filter (VWF), 3D point cloud-based algorithms | - | Different flight parameters (altitude, camera angle, and image overlap), SfM processing settings (depth filtering, alignment, and dense cloud quality), and tree detection algorithms (CHM smoothing, VWF parameters, and point-cloud-based methods) were investigated. Higher accuracies were achieved at high flight altitudes (120 m) and with high image overlap (90%). The combination of nadir and oblique imagery resulted in detection rates worse than using only nadir data. CHM-based VWF methods produced the most accurate results, with F-scores up to 0.664 (trees > 10 m) and 0.826 (trees > 20 m). |
| [46] | Pine tree plantations | DJI Mavic Pro (RGB) | Oblique | Local maxima on CHM | - | Prior to tree detection using local maxima, the CHM was mean-filtered with a user-defined filter size. Accuracy of up to 0.78 (F-score) was achieved. |
| [47] | Spruce-pine forest | DJI Phantom 4 Pro, Parrot Disco-Pro Ag & DJI Matrice 210 (RGB & multispectral) | Nadir | Local maxima on CHM | Watershed segmentation | Using consumer-grade cameras yielded higher tree detection rates and more accurate crown diameters compared to multispectral cameras. Cameras with higher spatial resolution performed better at higher flight altitudes, whereas the opposite was observed for cameras with lower resolution. The best results were achieved with the DJI Phantom 4 RGB drone, detecting 84% of the trees correctly. The mean absolute error of crown diameters derived was 0.79–0.99 m (Phantom 4, RGB) and 0.88–1.16 m (Zenmuse X5S). |
| [48] | Mixed conifer forest, open canopy | DJI Phantom 3 (RGB) | Nadir | Local maxima on CHM | - | Different window sizes for local maxima detection were tested, and the performance of smoothed and non-smoothed CHM was compared. Lower window sizes for local maxima and smoothing proved to be more successful in detecting trees. The overall F-score value was 0.86. |
| [49] | Forest plantations, high canopy density | DJI M600 Pro (5-lens oblique) | Oblique | Adaptive-/fixed-kernel bandwidth mean-shift (AMS/FMS), region growing on CHM | AMS, FMS, region growing on CHM | Kernel bandwidth was defined based on canopy properties and applied to the mean-shift tree detection and delineation algorithm. The AMS method outperformed FMS and seed-based region growing methods, achieving an overall accuracy of ≥0.72 for tree detection and a relative RMSE of ≤0.13 for crown width. |
| [50] | Orchard yard/naturally wooded pasture/urban trees, low tree density | DJI Phantom 4 (RGB) | Single shot detector (SSD) deep learning model on raster data (returning bounding boxes around tree position) | Several additional datasets were derived from the RGB and DSM and were used for training purpose. SSD was used for tree detection and species classification. Ensembled models with different input datasets generally demonstrated higher performance compared to models based on only one type of input data. | ||
| [51] | Conifer and mixed regenerating forest stands, low tree density | DJI Phantom 4 Pro (RGB) | Nadir | - | Mask R-CNN on raster data | Mask R-CNN were trained using manually delineated crowns; pretrained networks were also incorporated. An average F1-score of 0.91 was achieved. ITCD remained more challenging for heterogeneous and denser forest stands, as well as for smaller crowns. |
| [35] | Conifer plantation, moderate tree densities | DJI Phantom 4 (multispectral) | Local maxima on RGB and CHM | Marker-controlled watershed segmentation, Mask R-CNN on raster data | The performance of local maxima, marker-controlled watershed segmentation and Mask R-CNN were compared. Local maxima and watershed algorithms scored the best results when applied to the CHM. Overall, Mask R-CNN outperformed the classic algorithms. | |
| [52] | Subtropical broadleaf forest, moderate tree density | DJI Matrice 600 (RGB & hyperspectral) | - | Watershed-spectral-texture-controlled normalized cut | An extension was made to the CHM-based watershed segmentation to reduce over-segmentation. Objects segmented by the watershed algorithm were clustered based on the normalized cut criterion, considering both spectral and textural information. | |
| Parameter | 4 August 2021 | 29 March 2022 |
|---|---|---|
| Time (UTC + 1) Of First Shot | 12:53 a.m. | 12:34 a.m. |
| Wind Speed | 5.0–6.1 km/h | 3.2–6.5 km/h |
| Clouds | overcast (8/8) | overcast (8/8) |
| Mission Duration | 40 min | 120 min |
| No. Images | 573 | 1842 |
| Image Overlap (Front/Side) | 85%/80% | 85%/80% |
| Flight Speed | 5.9 m/s | 5.0–6.0 m/s |
| Shutter Speed | 1/320 s (shutter speed priority) | 1/320 s (shutter speed priority) |
| Distortion Correction | yes | yes |
| Gimbal Angle | −90° (nadir) | 1 × −90° (nadir) 2 × −70° (oblique) |
| Flight Altitude Over Tower | 110 m | 110 m |
| ISO Sensitivity | ISO200 | ISO400 |
| Aperture | F/5.0 (exposure value −0.66) | F6.3–F/7.1 (exposure value 0) |
| Geometric Resolution (Ground) | 3.56 cm | 4.29 cm |
| Area Covered | 0.518 km2 | 0.533 km2 |
| Parameter | 4 August 2021 | 29 March 2022 |
|---|---|---|
| Photo alignment accuracy | High (original image resolution) | High (original image resolution) |
| Image preselection | Generic/Reference | Generic/Reference |
| Key/tie point limit | 40,000/10,000 | 40,000/4000 |
| Detected tie points | 1,261,536 | 415,144 |
| Aligned cameras | 573/573 | 1839/1842 |
| Adaptive camera model fitting | Off | Off |
| Optimize camera alignment | No | No |
| Average error of camera position (x, y, z) | 0.98, 1.10, 2.37 cm | 0.16, 0.06, 1.62 cm |
| Effective reprojection error | 0.893 pix | 1.25 pix |
| Dense cloud quality | High | Ultra-high (original image resolution) |
| Depth filtering | Mild | Mild |
| Number of points (dense cloud) | approx. 158 million | approx. 174 million |
| Validation | Extracted | No. Validation Trees | No. Extracted Trees | TP | FN | FP | Precision | Recall | F1-Score | |
|---|---|---|---|---|---|---|---|---|---|---|
| (a) | UAV detectable | Prop. Method | 578 | 626 | 482 | 96 | 144 | 0.770 | 0.834 | 0.801 |
| (b) | Reference (MLS) | UAV detectable | 802 | 578 | 552 | 232 | 26 | 0.955 | 0.704 | 0.811 |
| (c) | Reference (MLS) | Prop. Method | 802 | 626 | 543 | 236 | 83 | 0.867 | 0.697 | 0.773 |
| Type of Validation Tree (UAV-Detectable Dataset) | No. Validation Trees | No. Extracted Trees | TP | FN | FP | Precision | Recall | F1-Score | |
|---|---|---|---|---|---|---|---|---|---|
| (a) | Only overstory trees | 578 | 626 | 482 | 96 | 144 | 0.770 | 0.834 | 0.801 |
| (b) | Overstory + understory trees | 671 | 626 | 543 | 120 | 83 | 0.867 | 0.819 | 0.843 |
| (c) | (b) + unclassified trees | 731 | 626 | 583 | 140 | 43 | 0.931 | 0.806 | 0.864 |
| (d) | (c) + tree stump and tilted trees | 804 | 626 | 611 | 183 | 15 | 0.976 | 0.770 | 0.861 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dietenberger, S.; Mueller, M.M.; Bachmann, F.; Nestler, M.; Ziemer, J.; Metz, F.; Heidenreich, M.G.; Koebsch, F.; Hese, S.; Dubois, C.; et al. Tree Stem Detection and Crown Delineation in a Structurally Diverse Deciduous Forest Combining Leaf-On and Leaf-Off UAV-SfM Data. Remote Sens. 2023, 15, 4366. https://doi.org/10.3390/rs15184366
Dietenberger S, Mueller MM, Bachmann F, Nestler M, Ziemer J, Metz F, Heidenreich MG, Koebsch F, Hese S, Dubois C, et al. Tree Stem Detection and Crown Delineation in a Structurally Diverse Deciduous Forest Combining Leaf-On and Leaf-Off UAV-SfM Data. Remote Sensing. 2023; 15(18):4366. https://doi.org/10.3390/rs15184366
Chicago/Turabian StyleDietenberger, Steffen, Marlin M. Mueller, Felix Bachmann, Maximilian Nestler, Jonas Ziemer, Friederike Metz, Marius G. Heidenreich, Franziska Koebsch, Sören Hese, Clémence Dubois, and et al. 2023. "Tree Stem Detection and Crown Delineation in a Structurally Diverse Deciduous Forest Combining Leaf-On and Leaf-Off UAV-SfM Data" Remote Sensing 15, no. 18: 4366. https://doi.org/10.3390/rs15184366
APA StyleDietenberger, S., Mueller, M. M., Bachmann, F., Nestler, M., Ziemer, J., Metz, F., Heidenreich, M. G., Koebsch, F., Hese, S., Dubois, C., & Thiel, C. (2023). Tree Stem Detection and Crown Delineation in a Structurally Diverse Deciduous Forest Combining Leaf-On and Leaf-Off UAV-SfM Data. Remote Sensing, 15(18), 4366. https://doi.org/10.3390/rs15184366