
Rapid-DEM: Rapid Topographic Updates through Satellite Change Detection and UAS Data Fusion

 , , , and
, , , and 
Abstract
:
1. Introduction
2. Methods
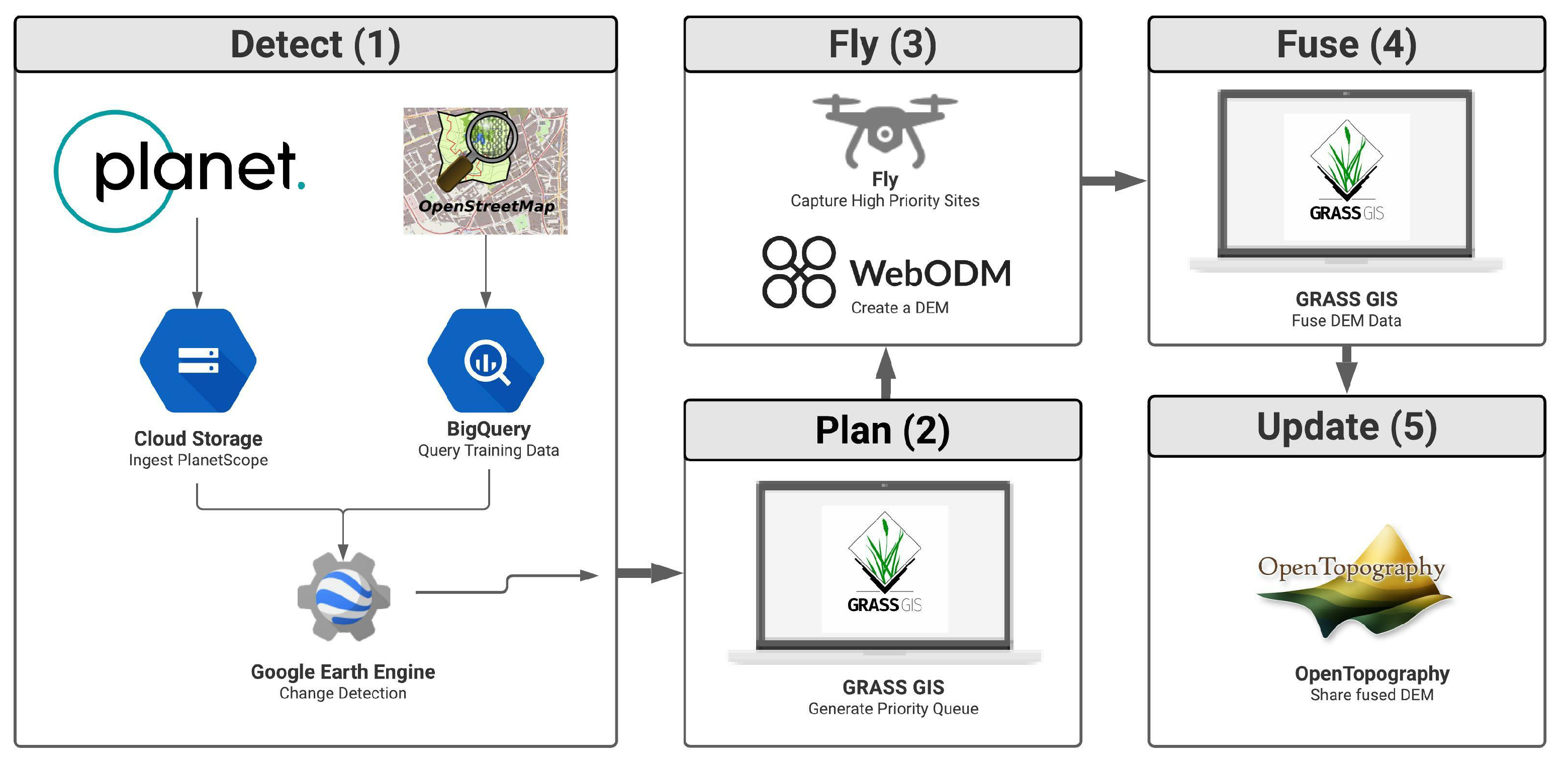
2.1. Rapid-DEM
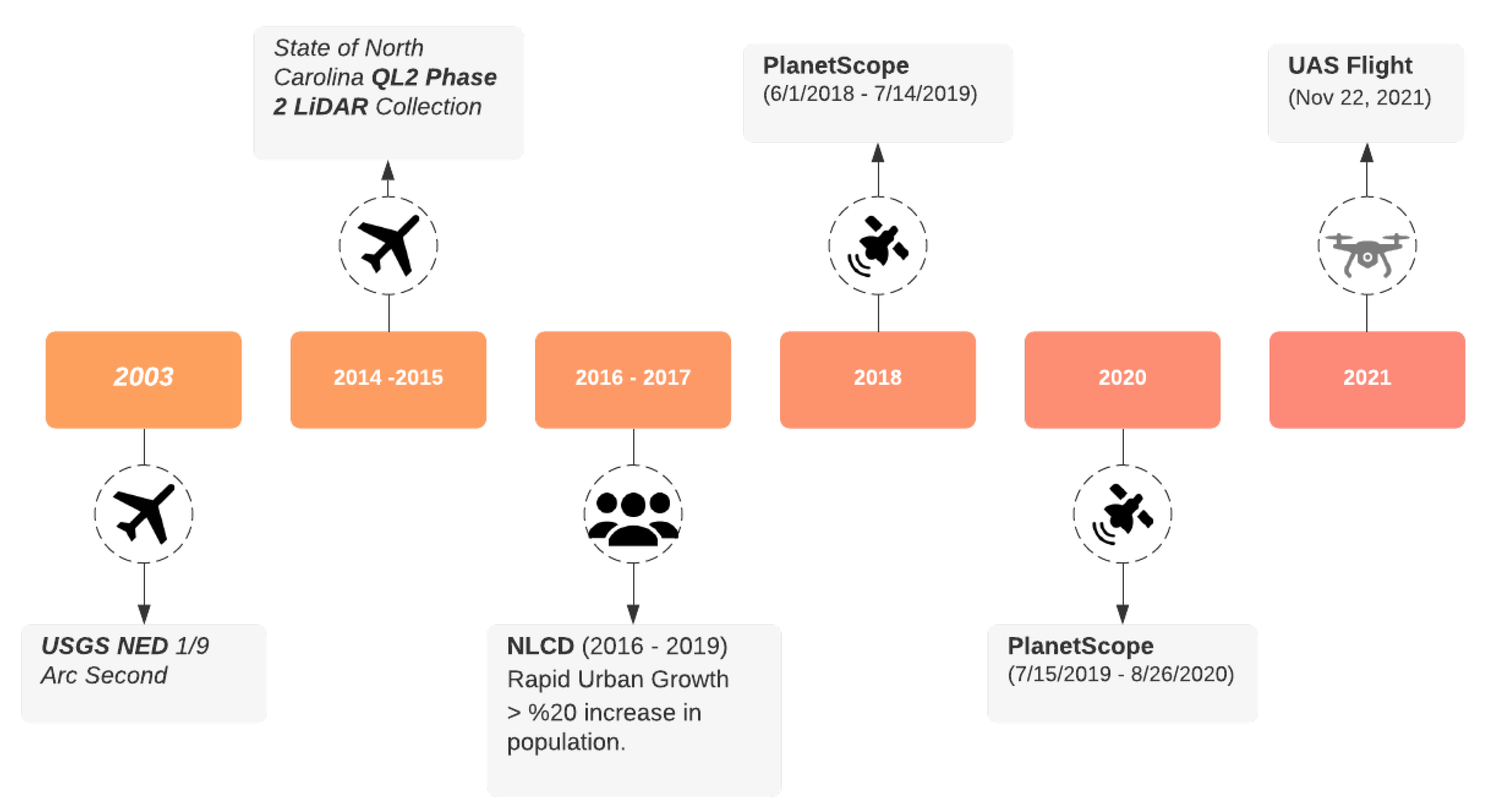
2.1.1. Data
2.1.2. Land Cover Classification and Change Detection
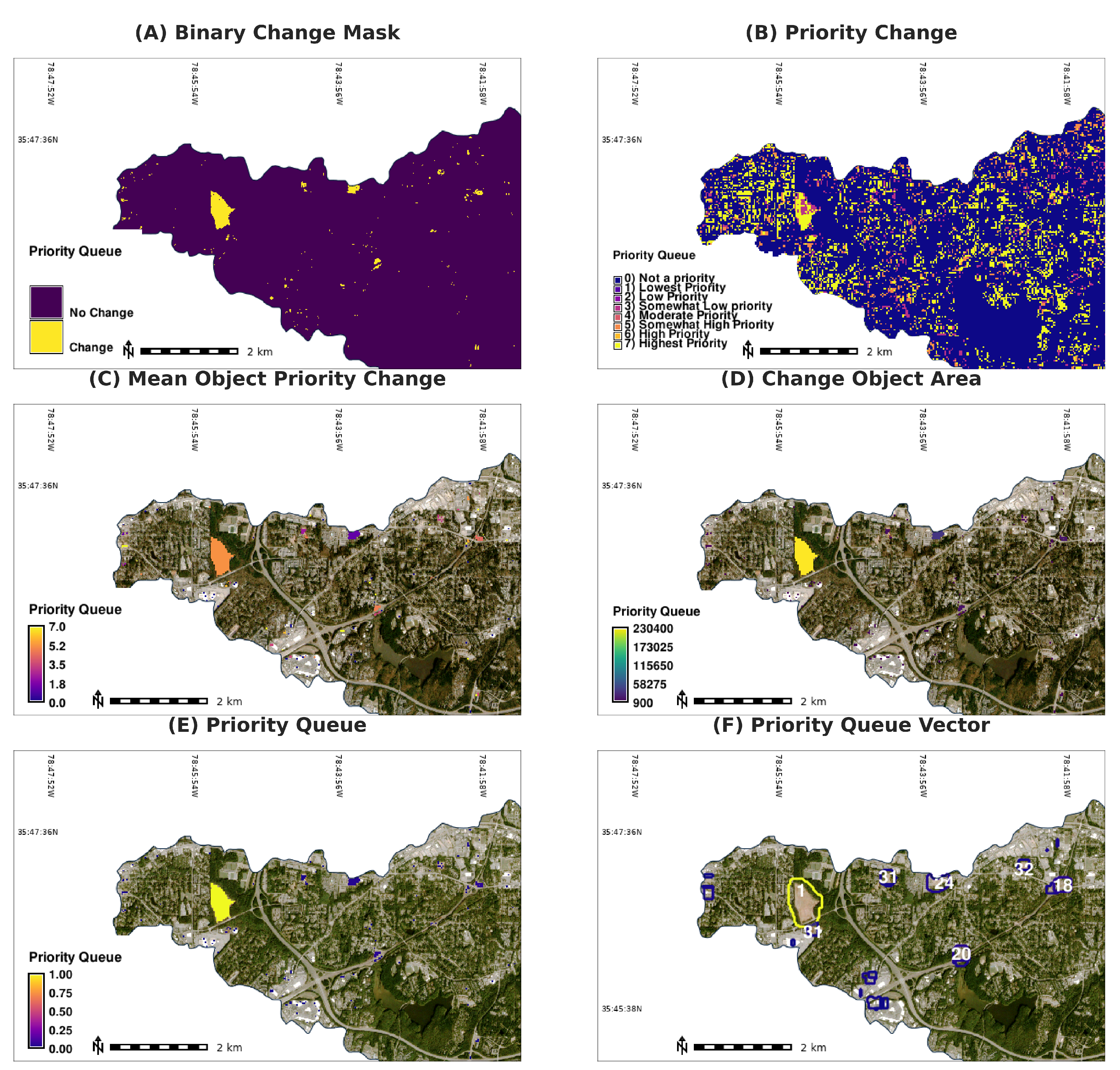
2.1.3. Prioritizing and Contextualization
- Create a new Priority Change (PC) map from date 1 and date 2 thematic classifications using priority change table expression
- Create Mean Object Priority Change (MOPC) map by calculating the weighted mean for each labeled object in the PC map
- Create Change Object Area (COA) map
- (a)
- Create Object Size (OS) map by counting the number of pixels per object
- (b)
- Create Object Pixel Area (OPA) map by calculating the area per pixel for the resolution
- (c)
- Calculate the Object Area (COA) map as OPA x OS
- Create Priority (P) map as COA x MOPC
- Generate Priority Queue (PQ) by normalizing the P map to real numbers between [0.0, 1.0] (Equation (2)).
- Export PQ to a vector polygon Vector Priority Queue (VPQ)
- Sort queue in descending order DESC (VPQ)
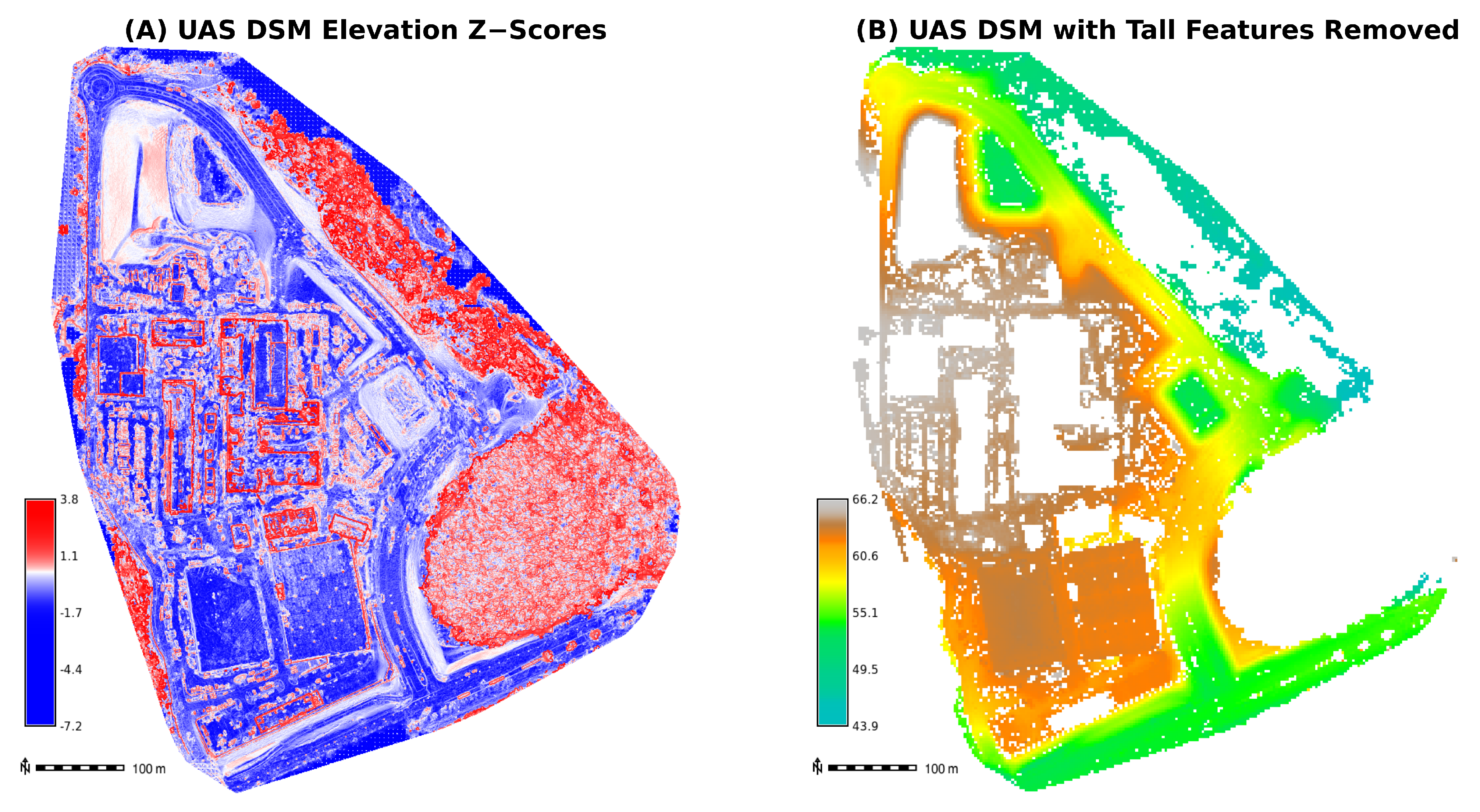
2.1.4. UAS Data Acquisition and Processing
2.1.5. DEM Fusion
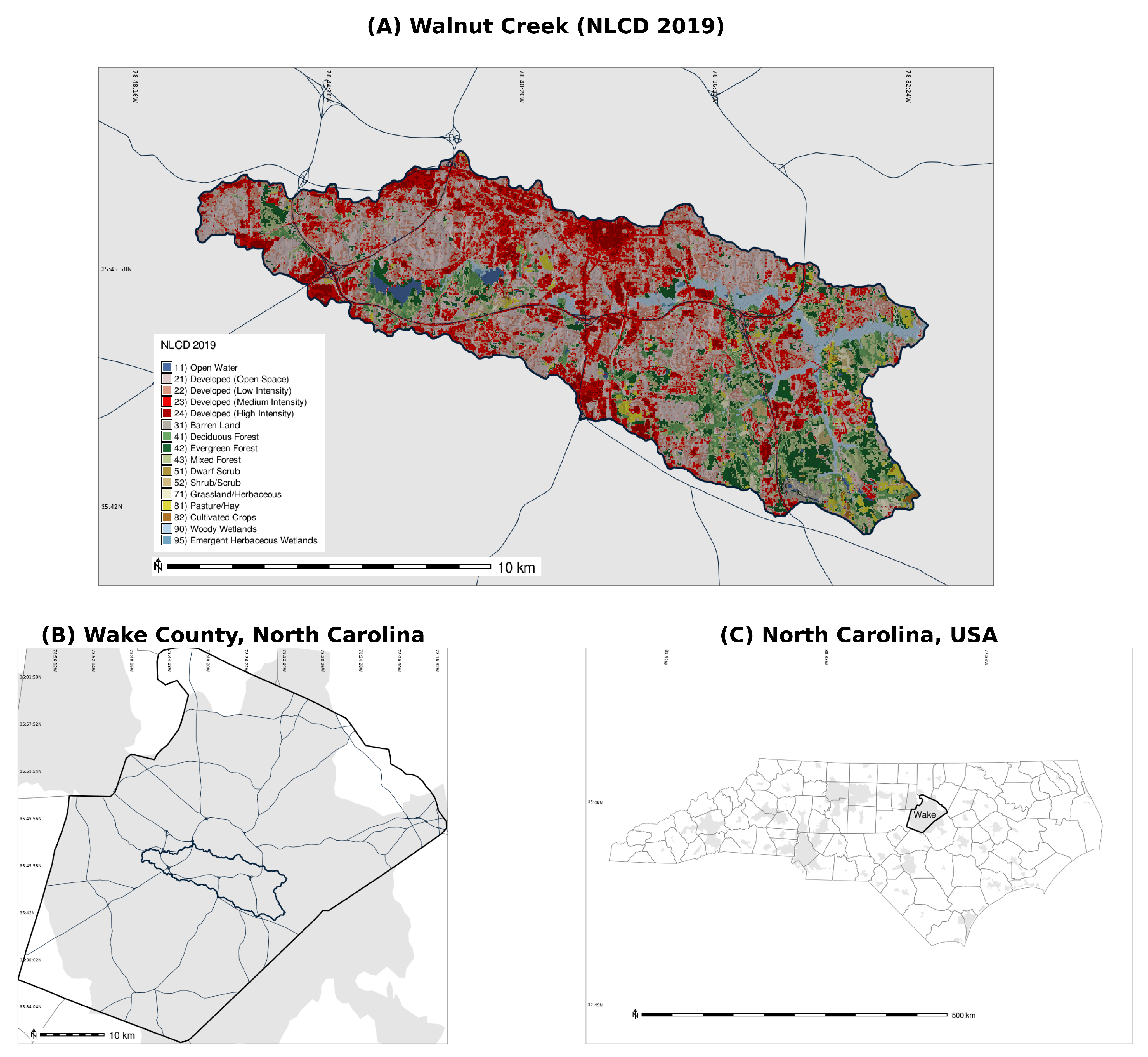
2.2. Case Study
2.2.1. Priority Queue Data
2.2.2. UAS Flight Data and Fusion

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Data Name | Data Type | Spatial Resolution | Acquisition Data | Spatial Extent | Source |
|---|---|---|---|---|---|
| USGS NED DEM | raster | 1/9 arc-second | 2001–2003 | Walnut Creek Watershed | [25,53] |
| PlanetScope | raster | 3 m | 2018–2020 | Walnut Creek Watershed | [9] |
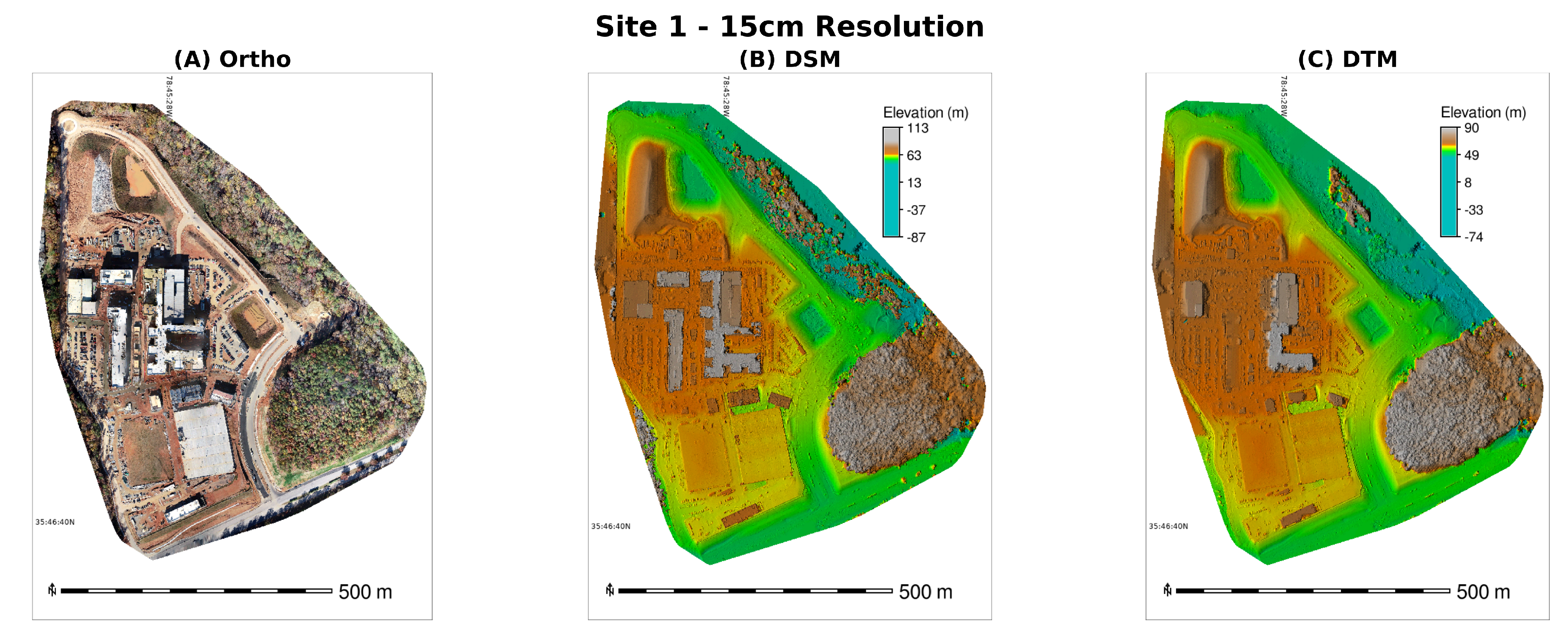
| UAS DEM | raster | 15 cm | 22 November 2021 | Local | |
| Stormwater Inlets | vector | NA | 29 January 2022 | Town of Cary, NC | [52] |
2.2.3. Assessment of the Change Impacts
3. Results
3.1. Land Cover Classification and Change Detection
3.2. Priority Queue
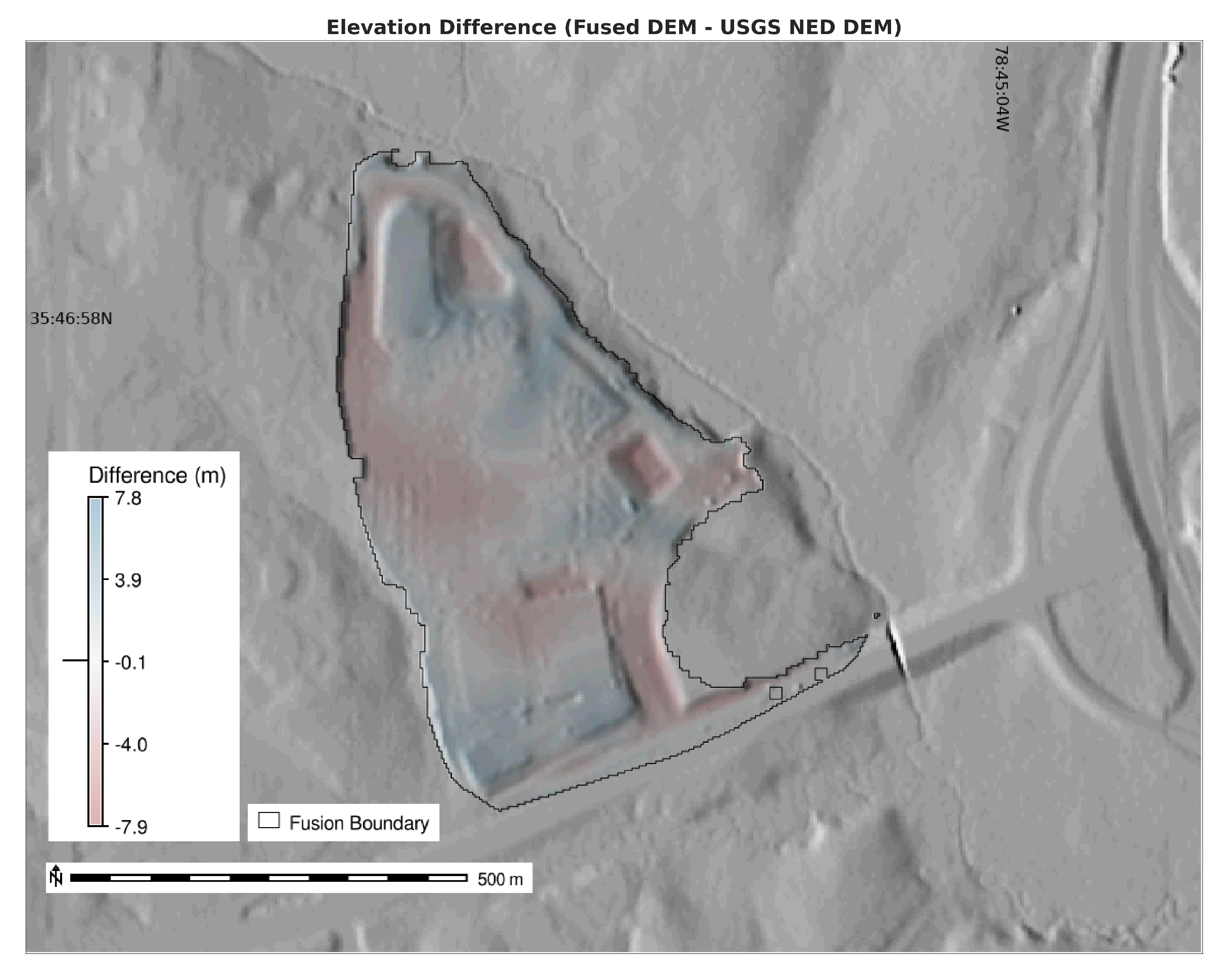
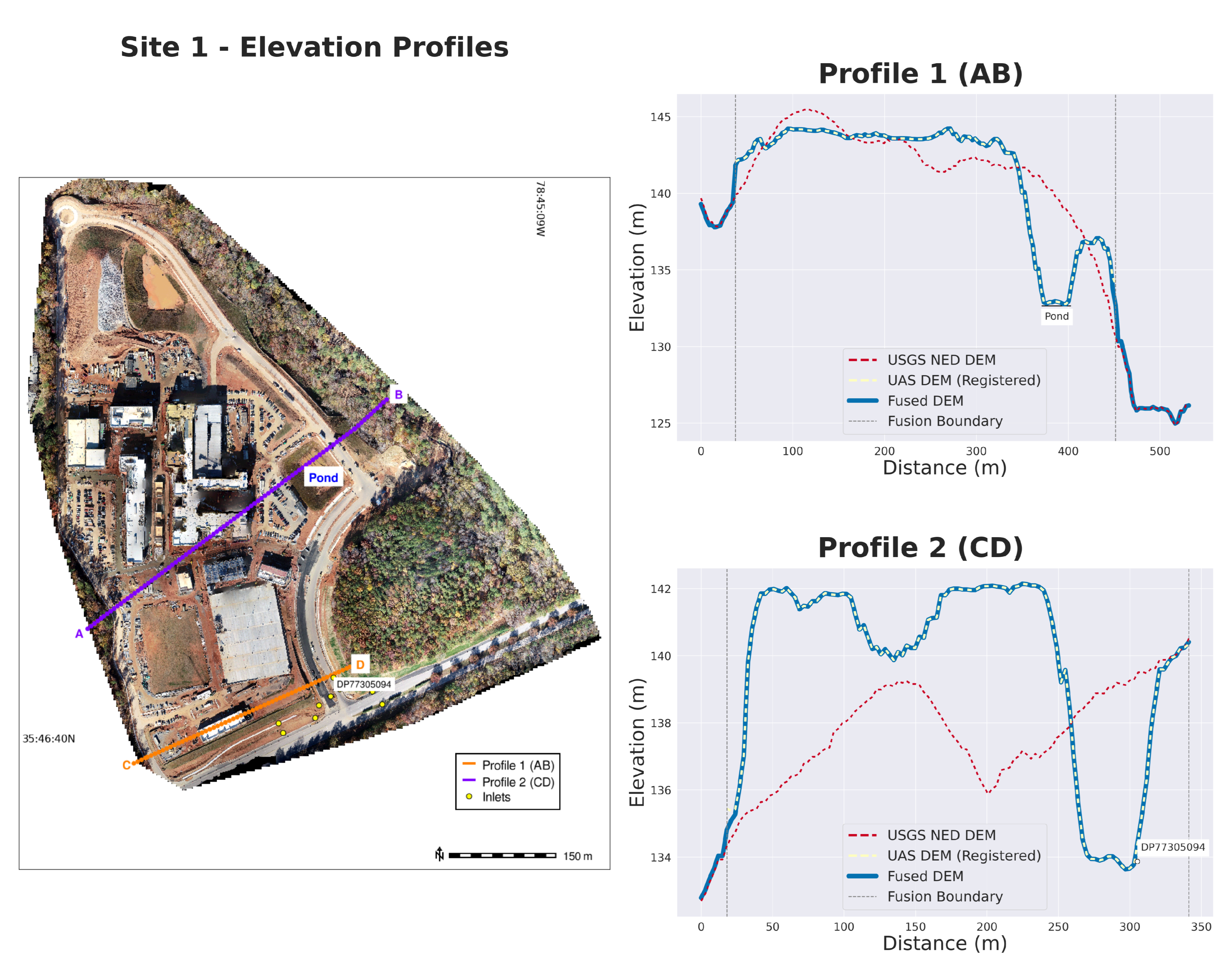
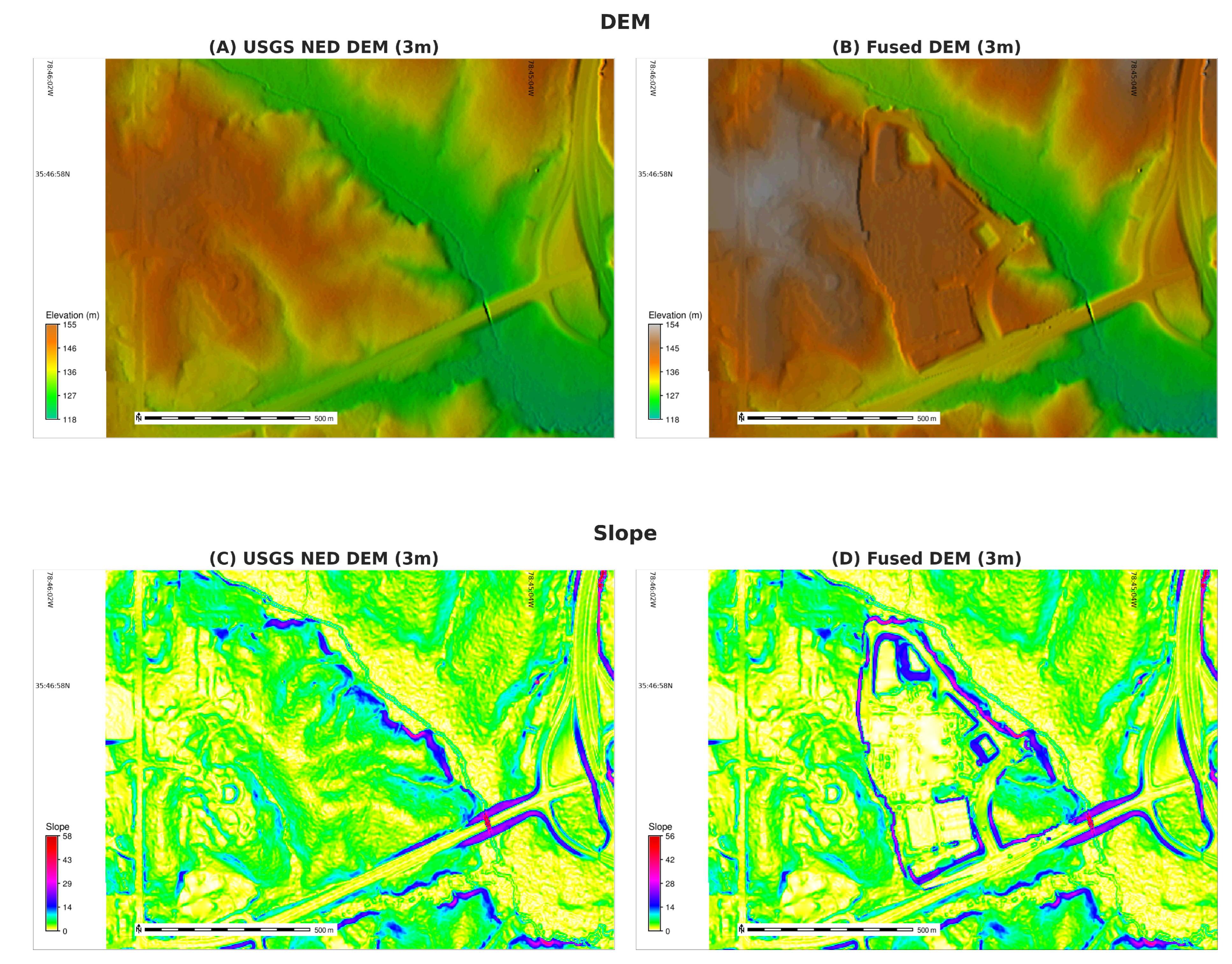
3.3. Updated DEM
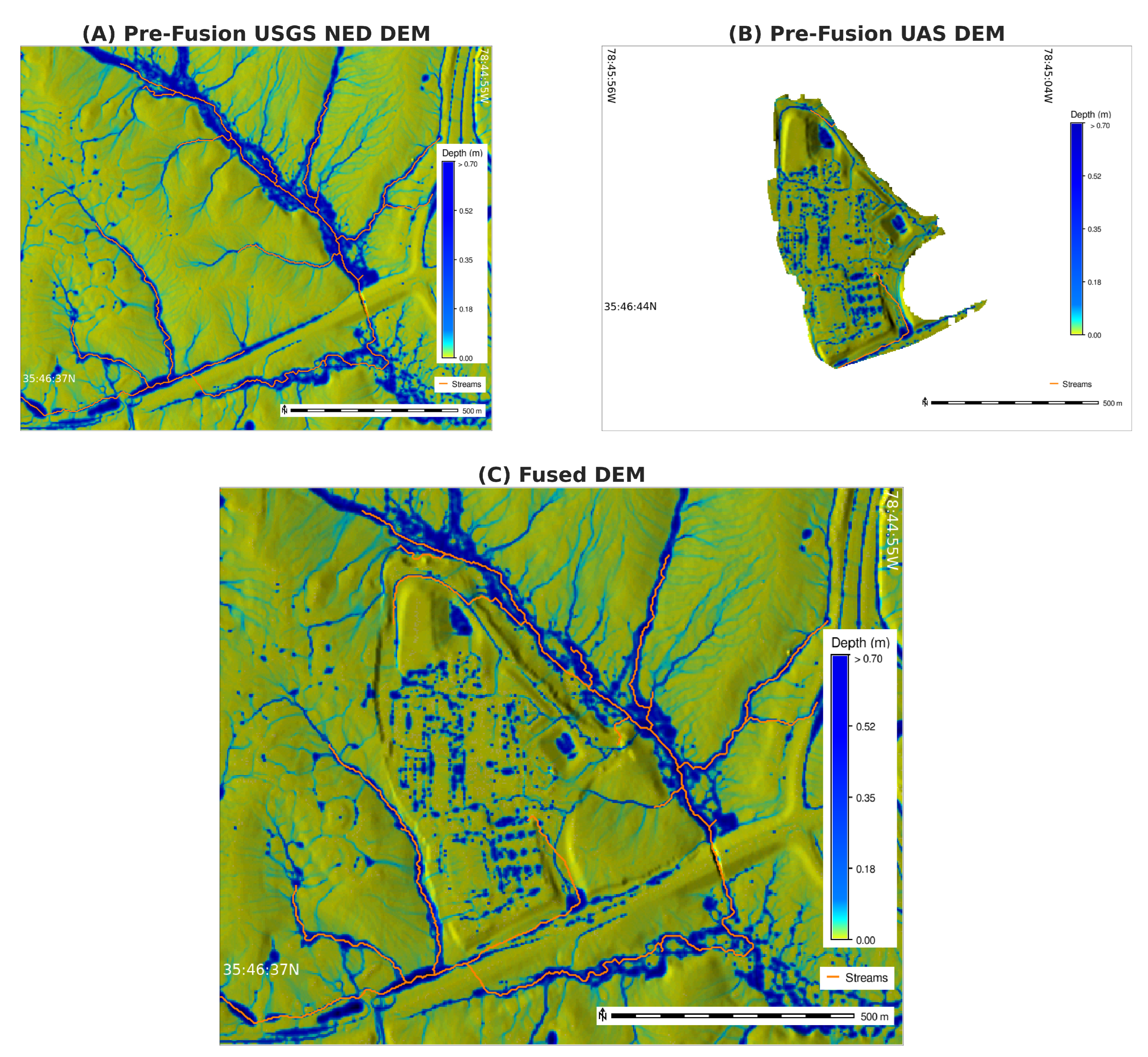
3.4. Impacts of Urban Topographic Change on Surface Water Runoff
4. Discussion
4.1. Land Cover Classification and Change Detection
4.2. Priority Queue
4.3. Data Acquisition and Fusion
4.4. DEM Updates
4.5. Additional Applications of Rapid-DEM
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| UAS | Unmanned Aerial System |
| DEM | Digital Elevation Model |
| DSM | Digital Surface Model |
| DTM | Digital Terrain Model |
| GCP | Ground Control Point |
| SfM | Structure from Motion |
| OSM | OpenStreetMap |
| ODM | Open Drone Map |
| GBQ | Google BigQuery |
| GCS | Google Cloud Storage |
| GEE | Google Earth Engine |
Appendix A
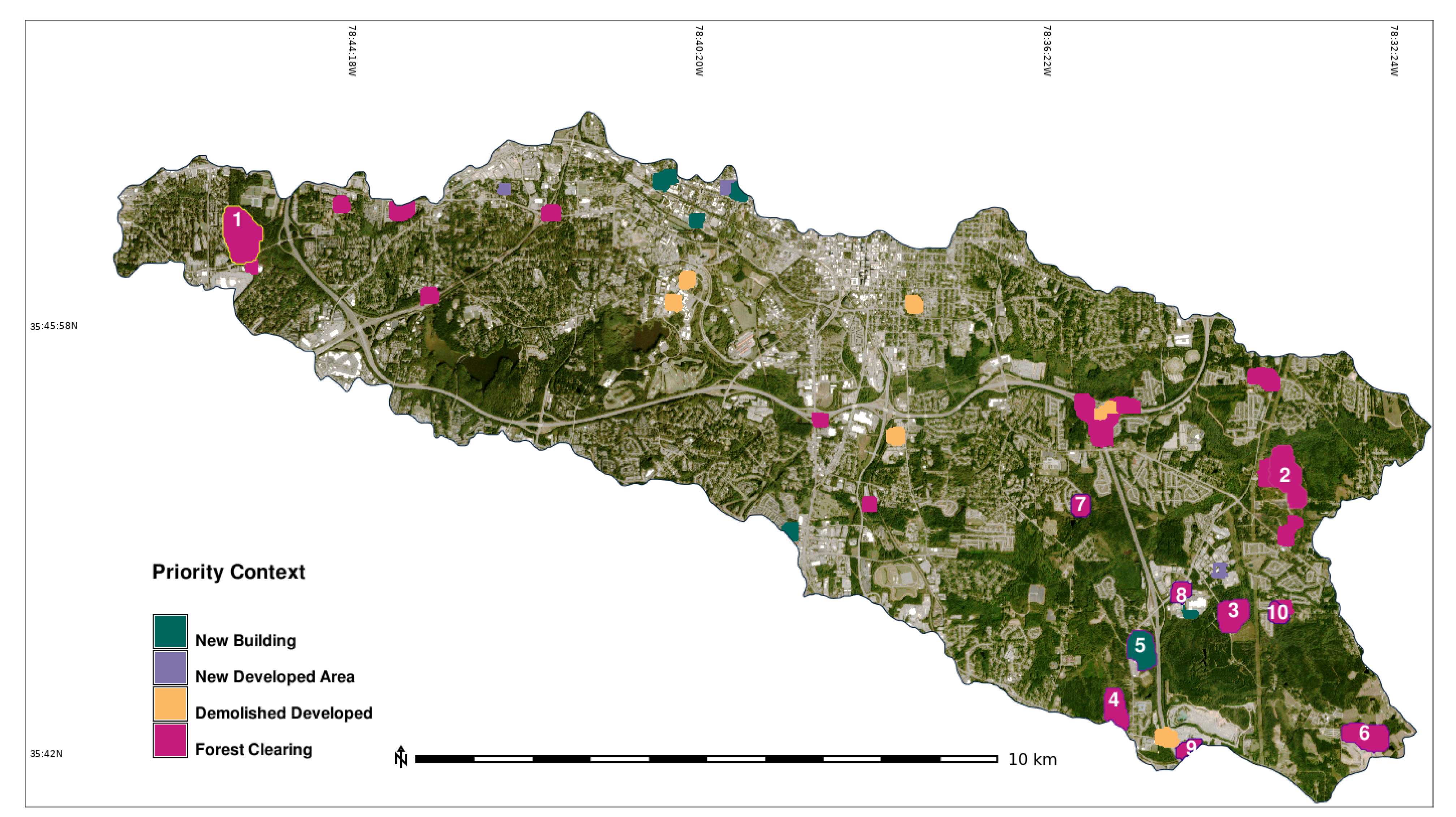
Appendix A.1. Priority Context Table
| From/To | Road | Building | Developed | Barren | Grass | Forest |
|---|---|---|---|---|---|---|
| Road | NA | NA | NA | NA | NA | NA |
| Building | NA | NA | Noise | Demolished Building | NA | NA |
| Developed | New Road | New Building | NA | Demolished Development | NA | NA |
| Barren | New Road | New Building | New Developed Area | NA | NA | NA |
| Grass | NA | New Building | New Developed Area | Field/Barren | NA | NA |
| Forest | NA | NA | Forest Clearing | Forest Clearing | NA | NA |
Appendix A.2. WebODM Processing Parameters
| Parameter | Value |
|---|---|
| dem-gapfill-steps | 5 |
| dem-resolution | 15 |
| depthmap-resolution | 1280 |
| feature-quality | ultra |
| ignore-gsd | true |
| pc-classify | true |
| pc-geometric | true |
| pc-quality | ultra |
| pc-rectify | true |
| pc-sample | 0.3 |
| smrf-scalar | 3 |
| smrf-slope | 1.2 |
| smrf-threshold | 2 |
| smrf-window | 400 |
Appendix A.3. UAS DSM to UAS DEM Processing Steps
Appendix A.4. Stormwater Rim Elevations Table
| FACILITYID | Inlet Elev | USGS DEM | Diff | UAS DEM | Diff | Fused DEM | Diff |
|---|---|---|---|---|---|---|---|
| DP77305061 | 132.66 | 133.52 | −0.86 | 133.45 | −0.79 | 133.45 | −0.79 |
| DP77306010 | 133.38 | 138.39 | −5.01 | 134.14 | −0.75 | 134.14 | −0.75 |
| DP77306019 | 134.50 | 133.87 | 0.63 | 134.36 | 0.15 | 134.36 | 0.15 |
| DP77305094 | 133.87 | 139.08 | −5.21 | 133.66 | 0.22 | 133.66 | 0.22 |
| DP77306020 | 133.61 | 138.39 | −4.78 | 133.63 | −0.02 | 133.63 | −0.02 |
| DP77305095 | 133.74 | 137.71 | −3.97 | 133.77 | −0.04 | 133.77 | −0.04 |
| DP77305096 | 133.58 | 136.83 | −3.25 | 133.79 | −0.21 | 133.79 | −0.21 |
| DP77305093 | 132.96 | 135.74 | −2.78 | 133.78 | −0.82 | 133.78 | −0.82 |
| RMSE | 3.71 m | m | m |
References
- UN. Secretary-General. In Progress towards the Sustainable Development Goals: Report of the Secretary-General; UN: New York, NY, USA, 2019. [Google Scholar]
- Vogler, J.B.; Vukomanovic, J. Trends in United States Human Footprint Revealed by New Spatial Metrics of Urbanization and Per Capita Land Change. Sustainability 2021, 13, 12852. [Google Scholar] [CrossRef]
- Zhu, C.; Li, Y. Long-Term Hydrological Impacts of Land Use/Land Cover Change from 1984 to 2010 in the Little River Watershed, Tennessee. Int. Soil Water Conserv. Res. 2014, 2, 11–21. [Google Scholar] [CrossRef] [Green Version]
- White, C.T.; Mitasova, H.; BenDor, T.K.; Foy, K.; Pala, O.; Vukomanovic, J.; Meentemeyer, R.K. Spatially Explicit Fuzzy Cognitive Mapping for Participatory Modeling of Stormwater Management. Land 2021, 10, 1114. [Google Scholar] [CrossRef]
- Eggimann, S.; Mutzner, L.; Wani, O.; Schneider, M.Y.; Spuhler, D.; Moy de Vitry, M.; Beutler, P.; Maurer, M. The Potential of Knowing More: A Review of Data-Driven Urban Water Management. Environ. Sci. Technol. 2017, 51, 2538–2553. [Google Scholar] [CrossRef] [Green Version]
- Zhang, J. Multi-source remote sensing data fusion: Status and trends. Int. J. Image Data Fusion 2010, 1, 5–24. [Google Scholar] [CrossRef] [Green Version]
- Pohl, C.; Van Genderen, J.L. Review article Multisensor image fusion in remote sensing: Concepts, methods and applications. Int. J. Remote Sens. 1998, 19, 823–854. [Google Scholar] [CrossRef] [Green Version]
- You, Y.; Cao, J.; Zhou, W. A Survey of Change Detection Methods Based on Remote Sensing Images for Multi-Source and Multi-Objective Scenarios. Remote Sens. 2020, 12, 2460. [Google Scholar] [CrossRef]
- Planet Team. Planet Application Program Interface: In Space for Life on Earth; Planet Team: San Francisco, CA, USA, 2017. [Google Scholar]
- Frazier, A.E.; Hemingway, B.L. A Technical Review of Planet Smallsat Data: Practical Considerations for Processing and Using PlanetScope Imagery. Remote Sens. 2021, 13, 3930. [Google Scholar] [CrossRef]
- Luo, N.; Wan, T.; Hao, H.; Lu, Q. Fusing High-Spatial-Resolution Remotely Sensed Imagery and OpenStreetMap Data for Land Cover Classification Over Urban Areas. Remote Sens. 2019, 11, 88. [Google Scholar] [CrossRef] [Green Version]
- Wan, T.; Lu, H.; Lu, Q.; Luo, N. Classification of High-Resolution Remote-Sensing Image Using OpenStreetMap Information. IEEE Geosci. Remote Sens. Lett. 2017, 14, 2305–2309. [Google Scholar] [CrossRef]
- Li, W.; He, C.; Fang, J.; Zheng, J.; Fu, H.; Yu, L. Semantic Segmentation-Based Building Footprint Extraction Using Very High-Resolution Satellite Images and Multi-Source GIS Data. Remote Sens. 2019, 11, 403. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.Y.; Park, T.; Isola, P.; Efros, A.A. Unpaired Image-to-Image Translation using Cycle-Consistent Adversarial Networks. arXiv 2020, arXiv:1703.10593. [Google Scholar]
- Albrecht, C.M.; Zhang, R.; Cui, X.; Freitag, M.; Hamann, H.F.; Klein, L.J.; Finkler, U.; Marianno, F.; Schmude, J.; Bobroff, N.; et al. Change Detection from Remote Sensing to Guide OpenStreetMap Labeling. ISPRS Int. J. Geo-Inf. 2020, 9, 427. [Google Scholar] [CrossRef]
- Stoker, J.; Miller, B. The Accuracy and Consistency of 3D Elevation Program Data: A Systematic Analysis. Remote Sens. 2022, 14, 940. [Google Scholar] [CrossRef]
- Jeziorska, J.; Mitasova, H.; Petrasova, A.; Petras, V.; Divakaran, D.; Zajkowski, T. Overland Flow Analysis Using Time Series Of SUAS-Derived Elevation Models. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, III-8, 159–166. [Google Scholar] [CrossRef] [Green Version]
- Petrasova, A.; Mitasova, H.; Petras, V.; Jeziorska, J. Fusion of high-resolution DEMs for water flow modeling. Open Geospat. Data Softw. Stand. 2017, 2, 6. [Google Scholar] [CrossRef] [Green Version]
- Sampson, C.C.; Smith, A.M.; Bates, P.D.; Neal, J.C.; Trigg, M.A. Perspectives on Open Access High Resolution Digital Elevation Models to Produce Global Flood Hazard Layers. Front. Earth Sci. 2016, 3, 85. [Google Scholar] [CrossRef] [Green Version]
- Wessels, K.; van den Bergh, F.; Roy, D.; Salmon, B.; Steenkamp, K.; MacAlister, B.; Swanepoel, D.; Jewitt, D. Rapid Land Cover Map Updates Using Change Detection and Robust Random Forest Classifiers. Remote Sens. 2016, 8, 888. [Google Scholar] [CrossRef] [Green Version]
- Sidhu, N.; Pebesma, E.; Câmara, G. Using Google Earth Engine to detect land cover change: Singapore as a use case. Eur. J. Remote Sens. 2018, 51, 486–500. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Reckling, W.; Mitasova, H.; Wegmann, K.; Kauffman, G.; Reid, R. Efficient Drone-Based Rare Plant Monitoring Using a Species Distribution Model and AI-Based Object Detection. Drones 2021, 5, 110. [Google Scholar] [CrossRef]
- OpenDroneMap Authors WebODM; WebODM. 2020. Available online: https://www.opendronemap.org/webodm/ (accessed on 11 February 2022).
- GRASS Development Team. Geographic Resources Analysis Support System (GRASS GIS) Software, Version 8.0. Open Source Geospatial Foundation. 2021. Available online: https://grass.osgeo.org (accessed on 28 February 2022).
- Krishnan, S.; Crosby, C.; Nandigam, V.; Phan, M.; Cowart, C.; Baru, C.; Arrowsmith, R. OpenTopography: A services oriented architecture for community access to LIDAR topography. In Proceedings of the 2nd International Conference on Computing for Geospatial Research & Applications, COM.Geo ’11, Washington, DC, USA, 23–25 May 2011; Association for Computing Machinery: New York, NY, USA, 2011; pp. 1–8. [Google Scholar] [CrossRef]
- Planet Team. Planet Imagery Product Specifications; Planet Labs Inc. 2018. Available online: https://assets.planet.com/docs/ (accessed on 8 February 2019).
- Planet Development Team. Planet API—Python Client—Planet API Client 1.4.6 Documentation. 2019. Available online: https://planetlabs.github.io/planet-client-python/index.html (accessed on 11 February 2022).
- Barrington-Leigh, C.; Millard-Ball, A. The world’s user-generated road map is more than 80% complete. PLoS ONE 2017, 12, e0180698. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yang, D.; Fu, C.S.; Smith, A.C.; Yu, Q. Open land-use map: A regional land-use mapping strategy for incorporating OpenStreetMap with earth observations. Geo-Spat. Inf. Sci. 2017, 20, 269–281. [Google Scholar] [CrossRef] [Green Version]
- Crawford, B.; Swanson, E.; Schultz-Fellenz, E.; Collins, A.; Dann, J.; Lathrop, E.; Milazzo, D. A New Method for High Resolution Surface Change Detection: Data Collection and Validation of Measurements from UAS at the Nevada National Security Site, Nevada, USA. Drones 2021, 5, 25. [Google Scholar] [CrossRef]
- Jensen, J.R. Introductory Digital Image Processing: A Remote Sensing Perspective, 4th ed.; Prentice Hall Press: Upper Saddle River, NJ, USA, 2015. [Google Scholar]
- Rosin, P.L. Thresholding for Change Detection. Comput. Vis. Image Underst. 2002, 86, 79–95. [Google Scholar] [CrossRef]
- Rogerson, P.A. Change detection thresholds for remotely sensed images. J. Geogr. Syst. 2002, 4, 85–97. [Google Scholar] [CrossRef]
- Jamalabad, M.; Abkar, A. Forest Canopy Density Monitoring, Using Satellite Images. In Proceedings of the 20th ISPRS Congress, International Society for Photogrammetry and Remote Sensing, Istanbul, Turkey, 12–23 July 2004; pp. 12–23. [Google Scholar]
- Rouse, J.W.; Haas, R.H.; Schell, J.A.; Deering, D.W. Monitoring Vegetation Systems in the Great Plains with ERTS; Technical Presentations. NASA SP-351; NASA, Goddard Space Flight Center: Greenbelt, MD, USA, 1974; Volume 1. [Google Scholar]
- Goward, S.N.; Markham, B.; Dye, D.G.; Dulaney, W.; Yang, J. Normalized difference vegetation index measurements from the advanced very high resolution radiometer. Remote Sens. Environ. 1991, 35, 257–277. [Google Scholar] [CrossRef]
- Huang, X.; Weng, C.; Lu, Q.; Feng, T.; Zhang, L. Automatic Labelling and Selection of Training Samples for High-Resolution Remote Sensing Image Classification over Urban Areas. Remote Sens. 2015, 7, 16024–16044. [Google Scholar] [CrossRef] [Green Version]
- Gislason, P.O.; Benediktsson, J.A.; Sveinsson, J.R. Random Forests for land cover classification. Pattern Recognit. Lett. 2006, 27, 294–300. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I. Textural Features for Image Classification. IEEE Trans. Syst. Man Cybern. 1973, 6, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Farda, N.M. Multi-temporal Land Use Mapping of Coastal Wetlands Area using Machine Learning in Google Earth Engine. IOP Conf. Ser. Earth Environ. Sci. 2017, 98, 012042. [Google Scholar] [CrossRef]
- Stehman, S.V. Sampling designs for accuracy assessment of land cover. Int. J. Remote Sens. 2009, 30, 5243–5272. [Google Scholar] [CrossRef]
- DroneDeploy Team. Drone & UAV Mapping Platform; DroneDeploy. 2020. Available online: https://www.dronedeploy.com/ (accessed on 28 September 2020).
- Stott, E.; Williams, R.D.; Hoey, T.B. Ground Control Point Distribution for Accurate Kilometre-Scale Topographic Mapping Using an RTK-GNSS Unmanned Aerial Vehicle and SfM Photogrammetry. Drones 2020, 4, 55. [Google Scholar] [CrossRef]
- Rogers, S.R.; Manning, I.; Livingstone, W. Comparing the Spatial Accuracy of Digital Surface Models from Four Unoccupied Aerial Systems: Photogrammetry versus LiDAR. Remote Sens. 2020, 12, 2806. [Google Scholar] [CrossRef]
- OpenDroneMap. ODM—A Command Line Toolkit to Generate Maps, Point Clouds, 3D Models and DEMs from Drone, Balloon or Kite Images. Available online: https://github.com/OpenDroneMap/ODM (accessed on 11 February 2022).
- Pell, T.; Li, J.Y.Q.; Joyce, K.E. Demystifying the Differences between Structure-from-MotionSoftware Packages for Pre-Processing Drone Data. Drones 2022, 6, 24. [Google Scholar] [CrossRef]
- Dewitz, J.; U.S. Geological Survey. National Land Cover Database (NLCD) 2019 Products (ver. 2.0, July 2020). U.S. Geological Survey Data Release. Available online: https://doi.org/10.5066/P96HHBIE (accessed on 1 July 2020).
- Homer, C.; Dewitz, J.; Jin, S.; Xian, G.; Costello, C.; Danielson, P.; Gass, L.; Funk, M.; Wickham, J.; Stehman, S.; et al. Conterminous United States land cover change patterns 2001–2016 from the 2016 National Land Cover Database. ISPRS J. Photogramm. Remote Sens. 2020, 162, 184–199. [Google Scholar] [CrossRef]
- Krautwurst, Z.; Petrasova, A.; Petras, V.; GRASS Development Team 2021; r.in.usgs. Geographic Resources Analysis Support System (GRASS) Software, Version 8.0. Open Source Geospatial Foundation. Available online: https://grass.osgeo.org/grass80/manuals/addons/r.in.usgs.html (accessed on 17 December 2021).
- Town of Cary. Storm Inlets; Wake County Open Data. Available online: https://maps.townofcary.org/arcgis/rest/services/Infrastructure/StormwaterNetwork/MapServer/35 (accessed on 30 January 2022).
- Gesch, D.B.; Evans, G.A.; Oimoen, M.J.; Arundel, S. The National Elevation Dataset. In Digital Elevation Model Technologies and Applications, 3rd ed.; The DEM Users Manual; American Society for Photogrammetry and Remote Sensing: Bethesda, MD, USA, 2018; pp. 83–110. [Google Scholar]
- Mitasova, H.; Thaxton, C.; Hofierka, J.; McLaughlin, R.; Moore, A.; Mitas, L. Path sampling method for modeling overland water flow, sediment transport, and short term terrain evolution in Open Source GIS. In Developments in Water Science; Elsevier: Chapel Hill, NC, USA, 2004; Volume 55, pp. 1479–1490. [Google Scholar] [CrossRef]
- Phan, T.N.; Kuch, V.; Lehnert, L.W. Land Cover Classification using Google Earth Engine and Random Forest Classifier—The Role of Image Composition. Remote Sens. 2020, 12, 2411. [Google Scholar] [CrossRef]
- Xie, S.; Liu, L.; Zhang, X.; Yang, J.; Chen, X.; Gao, Y. Automatic Land-Cover Mapping using Landsat Time-Series Data based on Google Earth Engine. Remote Sens. 2019, 11, 3023. [Google Scholar] [CrossRef] [Green Version]
- Talebi, H.; Peeters, L.J.M.; Otto, A.; Tolosana-Delgado, R. A Truly Spatial Random Forests Algorithm for Geoscience Data Analysis and Modelling. Math. Geosci. 2022, 54, 1–22. [Google Scholar] [CrossRef]
- Achanta, R.; Süsstrunk, S. Superpixels and Polygons Using Simple Non-iterative Clustering. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 4895–4904. [Google Scholar] [CrossRef] [Green Version]
- Sulla-Menashe, D.; Gray, J.M.; Abercrombie, S.P.; Friedl, M.A. Hierarchical mapping of annual global land cover 2001 to present: The MODIS Collection 6 Land Cover product. Remote Sens. Environ. 2019, 222, 183–194. [Google Scholar] [CrossRef]
- Panagiotou, E.; Chochlakis, G.; Grammatikopoulos, L.; Charou, E. Generating Elevation Surface from a Single RGB Remotely Sensed Image Using Deep Learning. Remote Sens. 2020, 12, 2002. [Google Scholar] [CrossRef]
- Ghuffar, S. DEM Generation from Multi Satellite PlanetScope Imagery. Remote Sens. 2018, 10, 1462. [Google Scholar] [CrossRef] [Green Version]
- Nuhu, S.K.; Manan, Z.A.; Wan Alwi, S.R.; Md Reba, M.N. Roles of geospatial technology in eco-industrial park site selection: State–of–the-art review. J. Clean. Prod. 2021, 309, 127361. [Google Scholar] [CrossRef]
- U.S. Geological Survey. USGS NED ned19_n36x00_w078x75_nc_statewide_2003 1/9 arc-second 2012 15 × 15 Minute IMG. 2012. Available online: https://www.sciencebase.gov/catalog/item/581d2892e4b08da350d5ff30 (accessed on 7 February 2022).
- Floodplain Mapping Program, North Carolina Division of Emergency Management. 2002. Available online: https://fris.nc.gov/fris/Download.aspx (accessed on 7 February 2022).
- Neteler, M.; Gbbert, S.; Tawalika, C.; Bettge, A.; Benelcadi, H.; Löw, F.; Adams, T.; Paulsen, H. Actinia: Cloud Based Geoprocessing (Version 1). In Proceedings of the 2019 Conference on Big Data from Space (BiDS’2019), Munich, Germany, 19–21 February 2019; Publications Office of the European Union 5: Luxembourg, 2019; pp. 41–44. [Google Scholar] [CrossRef]
- White, C.T.; Petrasova, A.; Reckling, W.; Mitasova, H. Rapid-DEM. OSF. 25 March. Available online: http://doi.org/10.17605/OSF.IO/YG6H8 (accessed on 12 February 2022).




| Data Name | Data Type | Spatial Resolution | Temporal Resolution | Spatial Extent | Data Access |
|---|---|---|---|---|---|
| PlanetScope | raster | 3 m | Daily | Global | GEE |
| Lidar-based DEM | raster | Variable | >Annually | Variable | GEE |
| UAS-based DEM | raster | Variable | NA | Local | Local |
| OpenStreetMap | vector | NA | Regularly Updated | Global | GBQ |
| Land Cover | OSM Tag | OSM Value(s) |
|---|---|---|
| Water | Natural | Water |
| Roads | Highway | Residential, Motorway, Trunk, Primary |
| Developed | Parking | Surface |
| Buildings | Building | House, Residential, Retail, Public |
| Barren | Surface | Sand, Dirt |
| Grass | Surface | Grass |
| Grass | Landuse | Grass, Meadow |
| Grass | Natural | Grassland |
| Forest | Natural | Wood |
| Feature | Bands | Kernel | Source | Equation |
|---|---|---|---|---|
| Original | B, NIR | - | - | |
| Median | B, NIR | Square-5 pixels | - | |
| Minimum | B, NIR | Square-5 pixels | - | |
| Maximum | B, NIR | Square-5 pixels | - | |
| NDVI | - | - | [36] | |
| NDWI | - | - | [40] | |
| BSI | - | - | [35] | |
| GLCM | R | Square - 3 pixels | [41] |
| From/To | Road | Building | Developed | Barren | Grass | Forest | Water |
|---|---|---|---|---|---|---|---|
| Road | NA | 7 | 4 | 4 | 1 | 1 | 0 |
| Building | 1 | NA | 5 | 7 | 3 | 3 | 0 |
| Developed | 3 | 7 | NA | 7 | 3 | 3 | 0 |
| Barren | 3 | 7 | 5 | NA | 2 | 2 | 0 |
| Grass | 3 | 7 | 5 | 3 | NA | 3 | 0 |
| Forest | 3 | 7 | 7 | 7 | 3 | NA | 0 |
| Water | 0 | 0 | 0 | 0 | 0 | 0 | NA |
| Type | Cloud Cover | GSD | Sun Azimuth | Sun Elevation | View Angle |
|---|---|---|---|---|---|
| count | 500 | 500 | 500 | 500 | 500 |
| mean | 0.01 | 3.78 | 131.96 | 44.37 | 0.59 |
| std | 0.01 | 0.17 | 18.12 | 15.79 | 0.54 |
| min | 0.00 | 3.50 | 89.90 | 15.90 | 0.00 |
| 25% | 0.01 | 3.60 | 113.65 | 27.70 | 0.10 |
| 50% | 0.01 | 3.80 | 132.05 | 45.50 | 0.40 |
| 75% | 0.02 | 3.90 | 149.53 | 60.73 | 1.00 |
| max | 0.05 | 4.70 | 160.80 | 70.40 | 1.90 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
White, C.T.; Reckling, W.; Petrasova, A.; Meentemeyer, R.K.; Mitasova, H. Rapid-DEM: Rapid Topographic Updates through Satellite Change Detection and UAS Data Fusion. Remote Sens. 2022, 14, 1718. https://doi.org/10.3390/rs14071718
White CT, Reckling W, Petrasova A, Meentemeyer RK, Mitasova H. Rapid-DEM: Rapid Topographic Updates through Satellite Change Detection and UAS Data Fusion. Remote Sensing. 2022; 14(7):1718. https://doi.org/10.3390/rs14071718
Chicago/Turabian StyleWhite, Corey T., William Reckling, Anna Petrasova, Ross K. Meentemeyer, and Helena Mitasova. 2022. "Rapid-DEM: Rapid Topographic Updates through Satellite Change Detection and UAS Data Fusion" Remote Sensing 14, no. 7: 1718. https://doi.org/10.3390/rs14071718
APA StyleWhite, C. T., Reckling, W., Petrasova, A., Meentemeyer, R. K., & Mitasova, H. (2022). Rapid-DEM: Rapid Topographic Updates through Satellite Change Detection and UAS Data Fusion. Remote Sensing, 14(7), 1718. https://doi.org/10.3390/rs14071718