1. Introduction
At present, landslides have not only imposed huge direct economic losses on industrial and agricultural production and the safety of human lives and properties but have also resulted in incalculable indirect losses due to the suspension of amphibious transportation. Therefore, it is urgent to conduct effective early-warning research on landslides, where the reliability of slope stability analysis has been an important prerequisite. However, various categories of inevitable uncertainties (e.g., the boundary conditions uncertainty, geological model uncertainty, soil parameter uncertainty, and external trigger uncertainty) may pose an important influence on accurate slope reliability, where the soil properties uncertainty accounts for a major contribution to the probability of failure [
1,
2,
3,
4,
5,
6,
7].
To offer a rational and convincing assessment of slope stability, scholars have made numerous efforts to integrate probability and statistic theories with the traditional slope reliability assessment approaches with consideration of the subsurface uncertainties [
8,
9,
10,
11,
12,
13]. For example, Low et al., (1997) developed a new method with the application of spreadsheets to calculate the Hasofer–Lind second moment [
14]. Cho (2013) adopted a first-order reliability method (FORM) to evaluate the slope stability considering multiple failure modes [
10]. Jiang et al., (2015) studied the slope stability with a low probability of failure in spatially variable soils based on MCS [
15]. However, the above-mentioned methods are only effective in the case that the issues have explicit limit state function. Although MCS had proven its ability to address cases with implicit limit state function or a low probability of failure [
16,
17,
18,
19,
20,
21], it might encounter some limitations such as substantial computational efforts and a complicated procedure, particularly for issues with a low probability of failure.
Agent model-based response surface methods (RSMs) [
22,
23,
24,
25,
26,
27] can make compensations for the shortcomings of MCS. Cho (2009), Li et al., (2013), and Kang et al., (2015, 2016, 2017) proposed a procedure by integrating numerical analyses such as FEM and LEM into the reliability analysis for complicated slopes [
22,
28,
29,
30,
31]. They employed an artificial neural network (ANN), SVR, and extreme learning machine (ELM)-based RSMs to substitute the real performance function. The failure probability was obtained from the agent model in connection with MCS. Unfortunately, these studies paid extensive attention to the uncertainty of soil properties but lacked investigations on the probabilistic characteristics of the water table level, which may greatly contribute to the probability of slope failure. In reality, the usual practice considers the water table level as a constant and proceeds with probabilistic analysis. This practice, which neglects such uncertainty, may produce an obvious deviation concerning the slope reliability, especially for complex landslides with an unknown water table level in high mountainous areas where people and instruments find it difficult to access. More importantly, extensive data are required to construct a sufficiently accurate RSM. For instance, for ANN-based RSM, 20 training samples were used to accurately establish the RSM for slope with three random variables, whereas 150 samples were needed for issues with four random variables [
28]. Although the training samples adopted to establish an effective SVM and ELM-based RSMs [
22,
26] were reduced to fifteen times the random variables considered, the sample size generated was still large.
Alternatively, the GPR agent model offers a better choice. The merits of this technique over the other machine-learning techniques had been extensively discussed by Seeger (2008); Su et al., (2009); Kang et al., (2017) [
30,
32,
33]. Furthermore, this study will illustrate that limited samples are able to construct a sufficiently accurate GPR-based RSM, which is much smaller than that needed by ANN, SVM, or ELM [
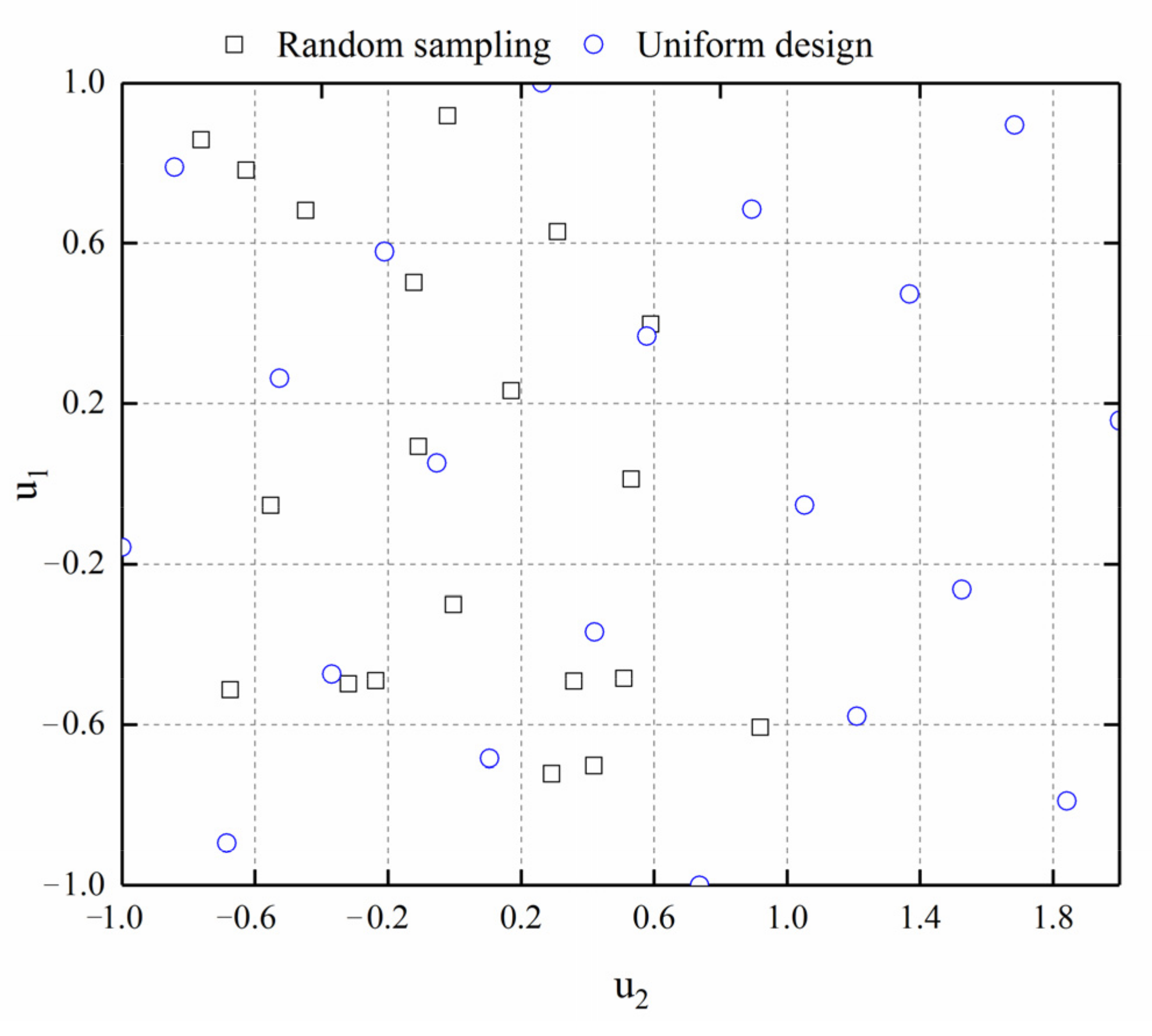
34]. Nonetheless, the samples are frequently generated by a random approach [
35], which may not ensure that the selected samples scatter in the domain uniformly. More importantly, most of the RSMs in the available literature are constructed only based on training samples extracted once, which may, in turn, lower the accuracy of the constructed method, and even increase the computational effort when the sample size is small or the extrapolated testing samples exceed the training sample space.
Further, the hyper-parameters of the covariance function for GPR play an important role in model performance, which depends on the extent of parameter optimization. The conjugate gradient method is often used to search the hyper-parameters. However, it may encounter several limitations, such as over-dependence on the initial value, difficulty in determining the number of iterations, and local optimization [
36]. The issues may be extremely severe since the best parameters for GPR are customarily unavailable.
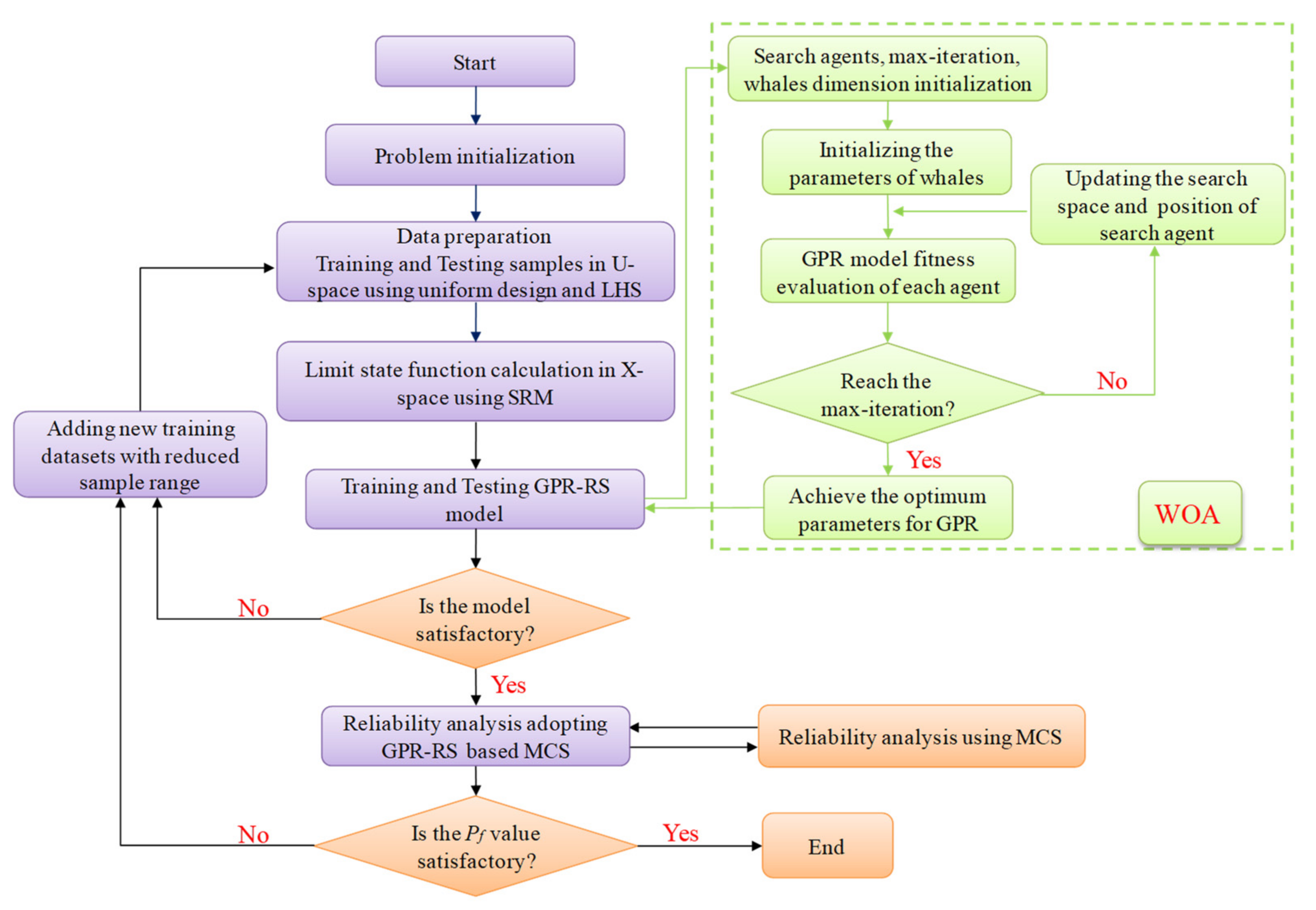
Hence, to address the aforementioned issues, this study develops a practical procedure, i.e., a dynamic WOA-GPR RSM based on a uniform design that considers the uncertainty of the water table level [
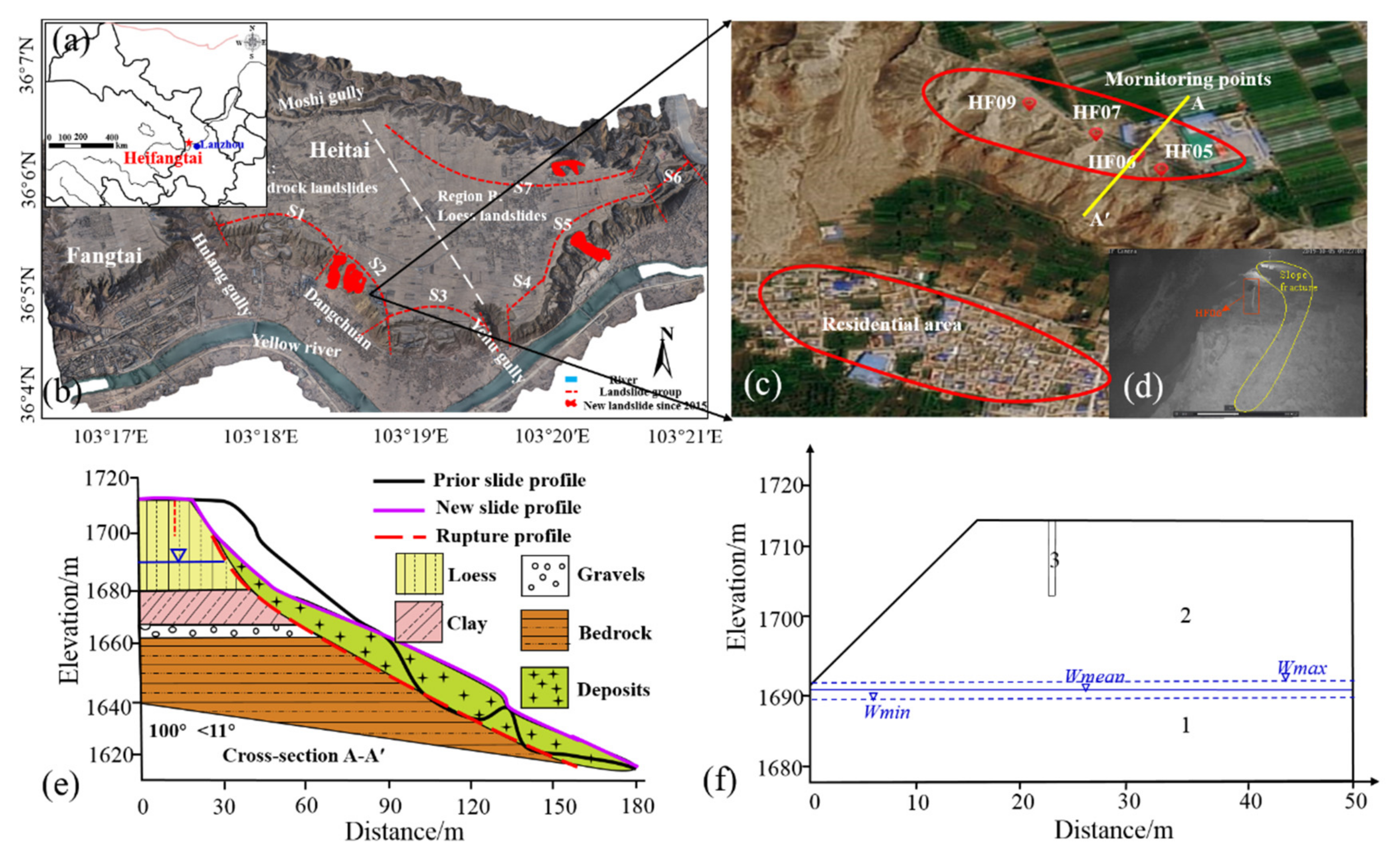
37]. One of the main purposes of this research is to investigate the significance and benefits of considering such uncertainty in slope reliability analysis, particularly for high mountainous areas where people and instruments find it hard to reach, and to improve the model performance and efficiency through iteration. This study is also devoted to improving the accuracy and efficiency of the current RSMs. Two practical slopes are selected as the case studies, which have been reported by several researchers [
38,
39,
40]. Accordingly, sufficient field monitoring data are available to compare and verify the slope stability analysis. Conventional methods such as MCS,
v-SVR, and GRNN are adopted for comparison [
41,
42]. The results demonstrate that with the consideration of the uncertainty of the water table level, the developed model obtains a reasonable probability of failure. At the same time, the application of an iterative algorithm has reduced the number of representative samples selected by the uniform design and consequently improved the accuracy and efficiency of GPR RSM. WOA, which is able to jump out of the local optimum, is adopted to achieve the optimal hyper-parameters for GPR. In conclusion, this dynamic WOA-GPR-based RSM with consideration of the water table level uncertainty, which has not been investigated previously by other researchers, offers an effective way for complicated slope reliability analysis.
4. Discussion
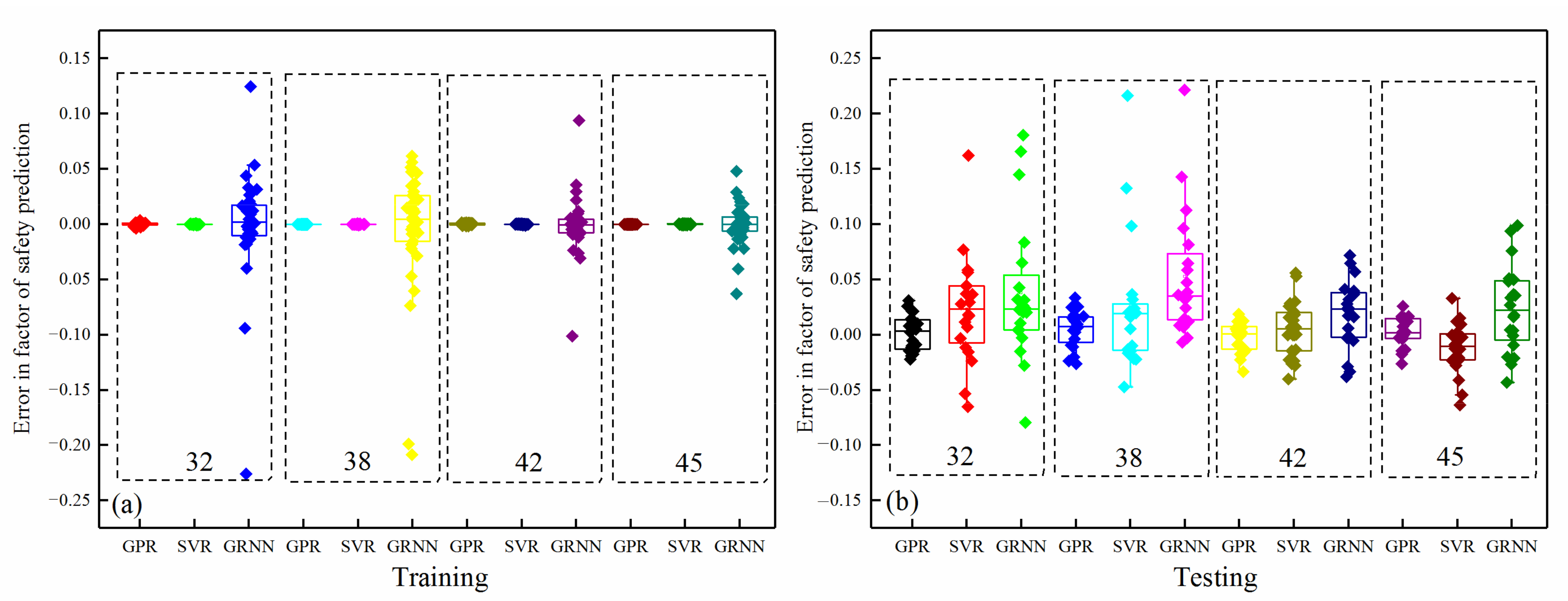
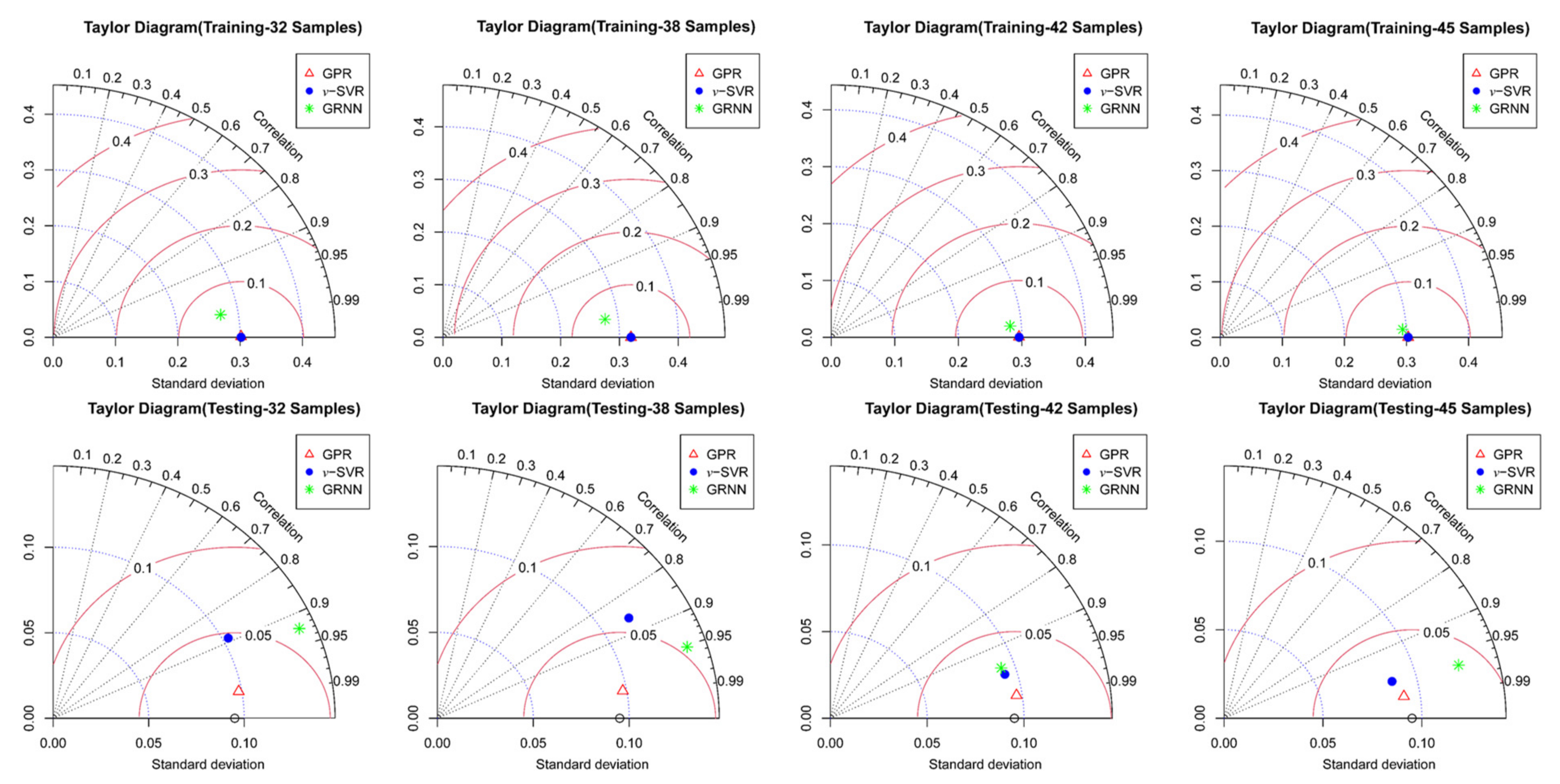
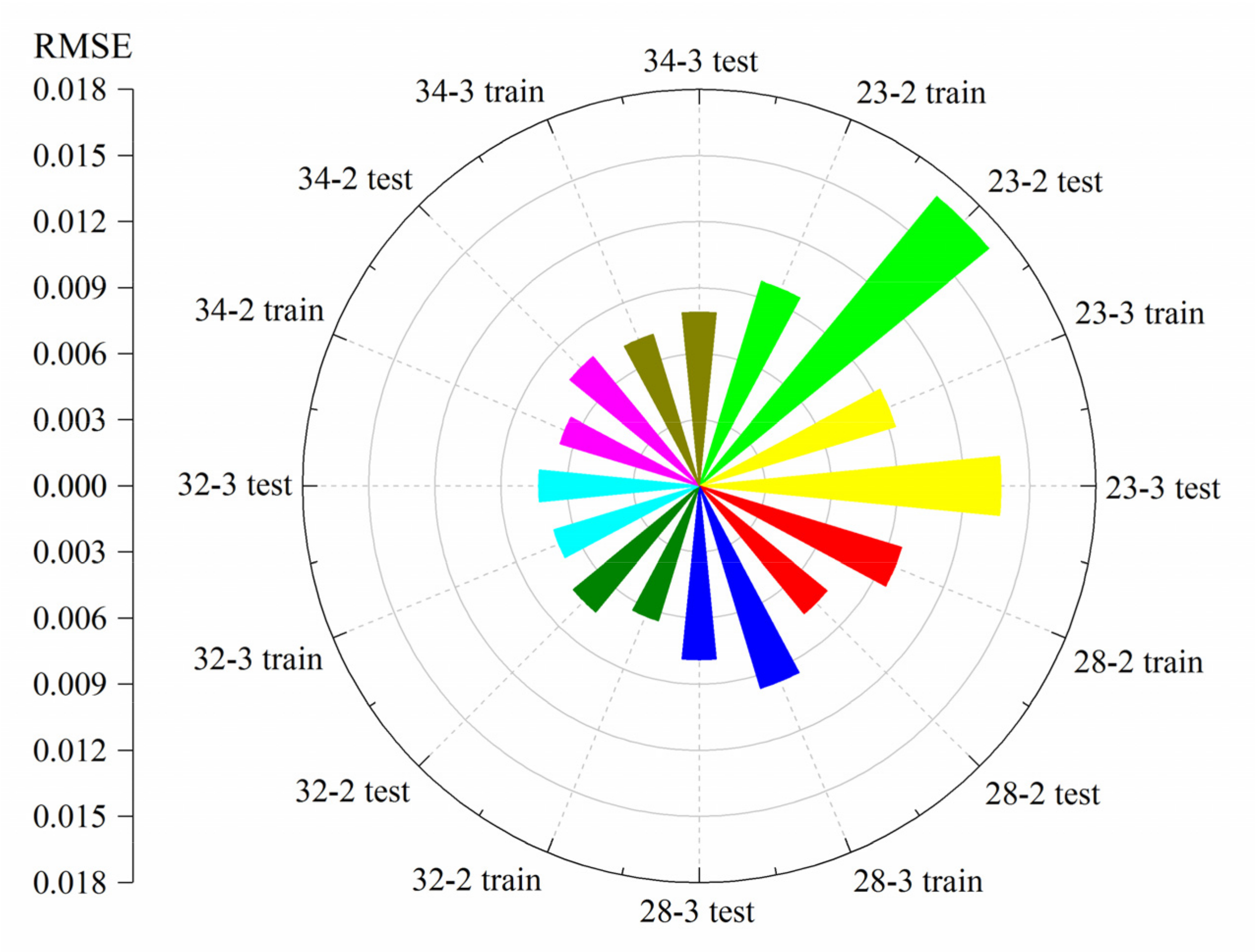
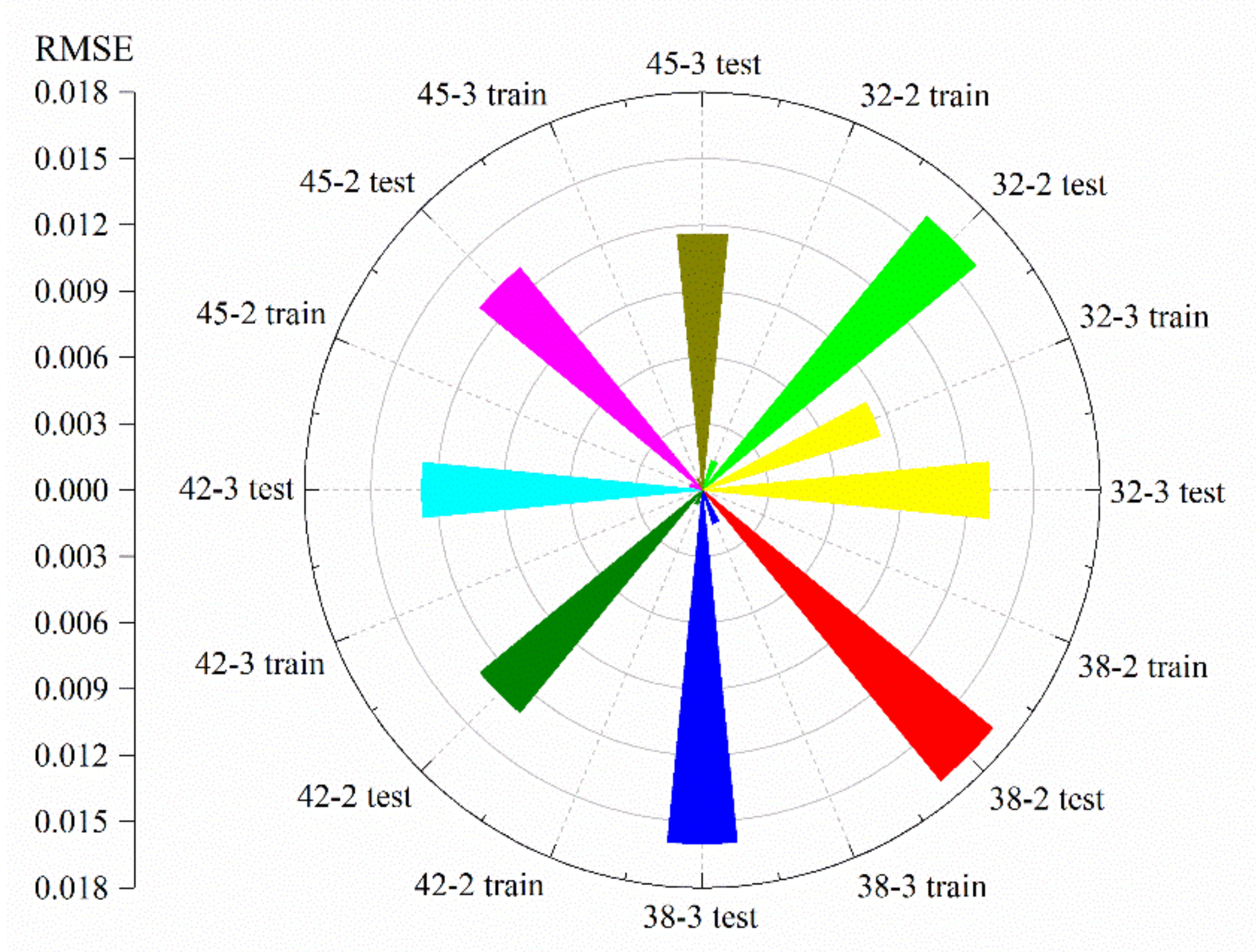
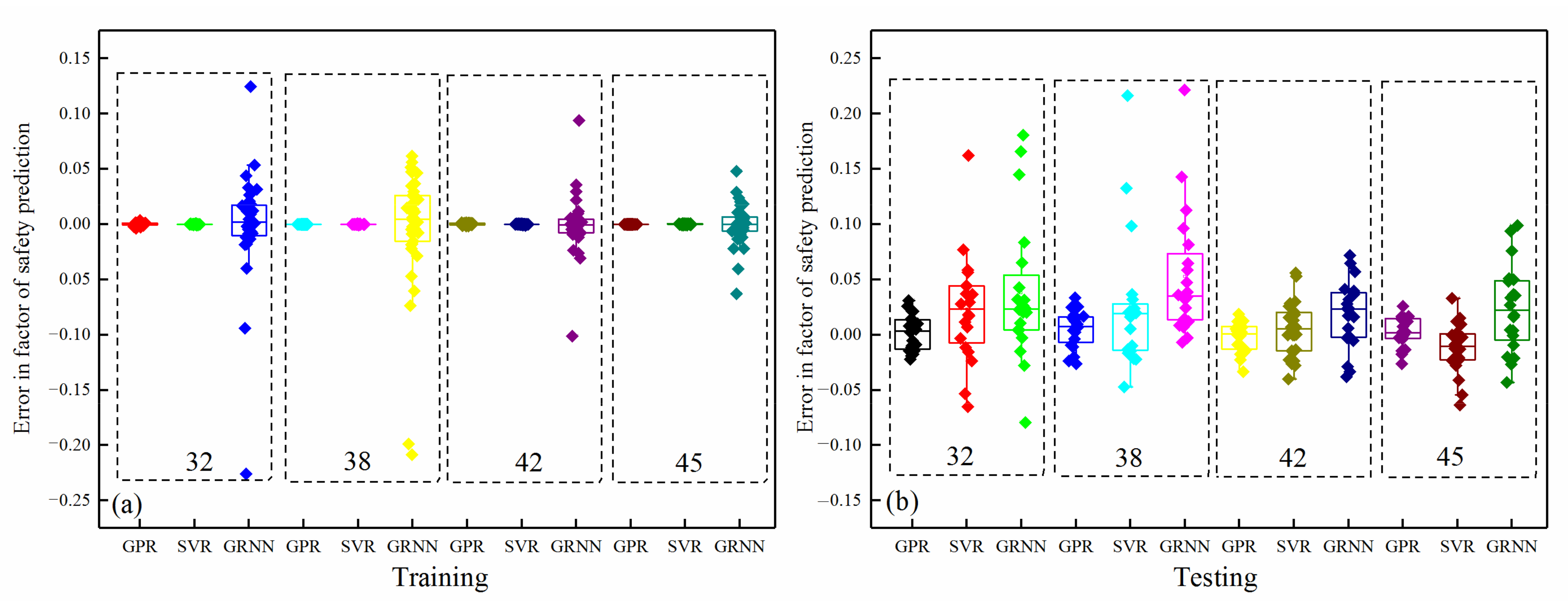
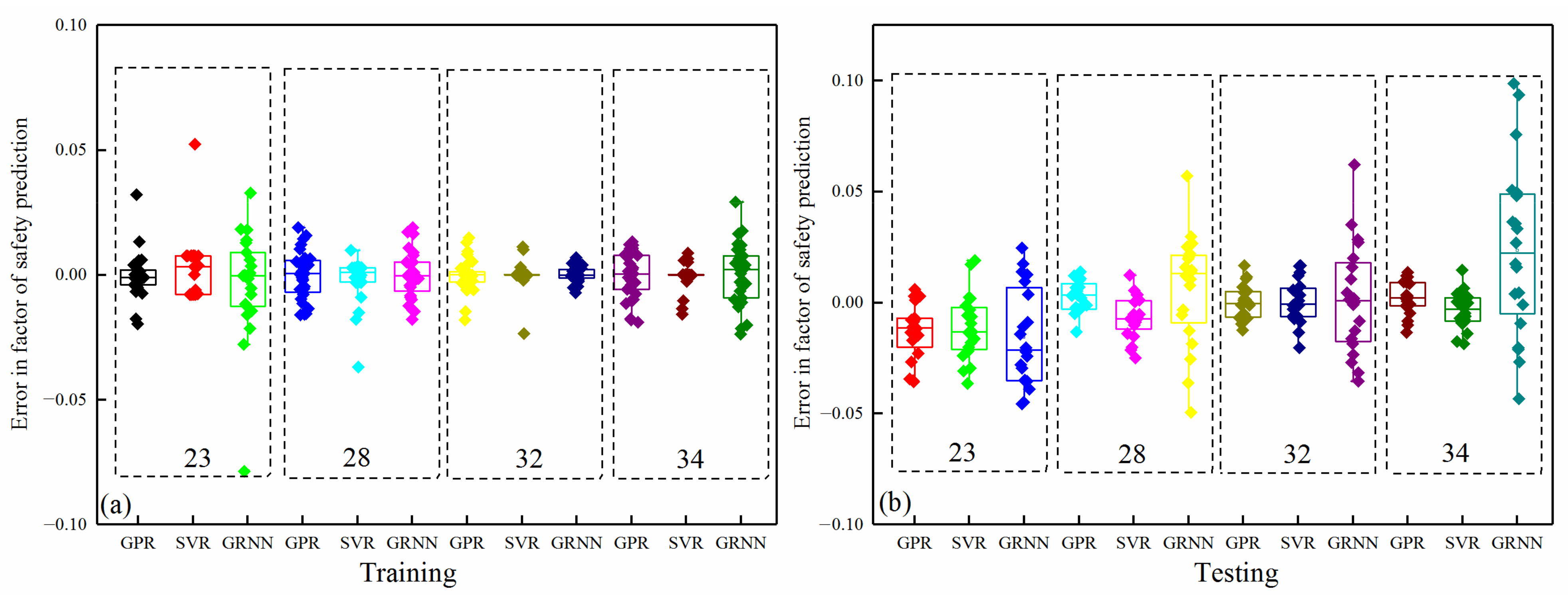
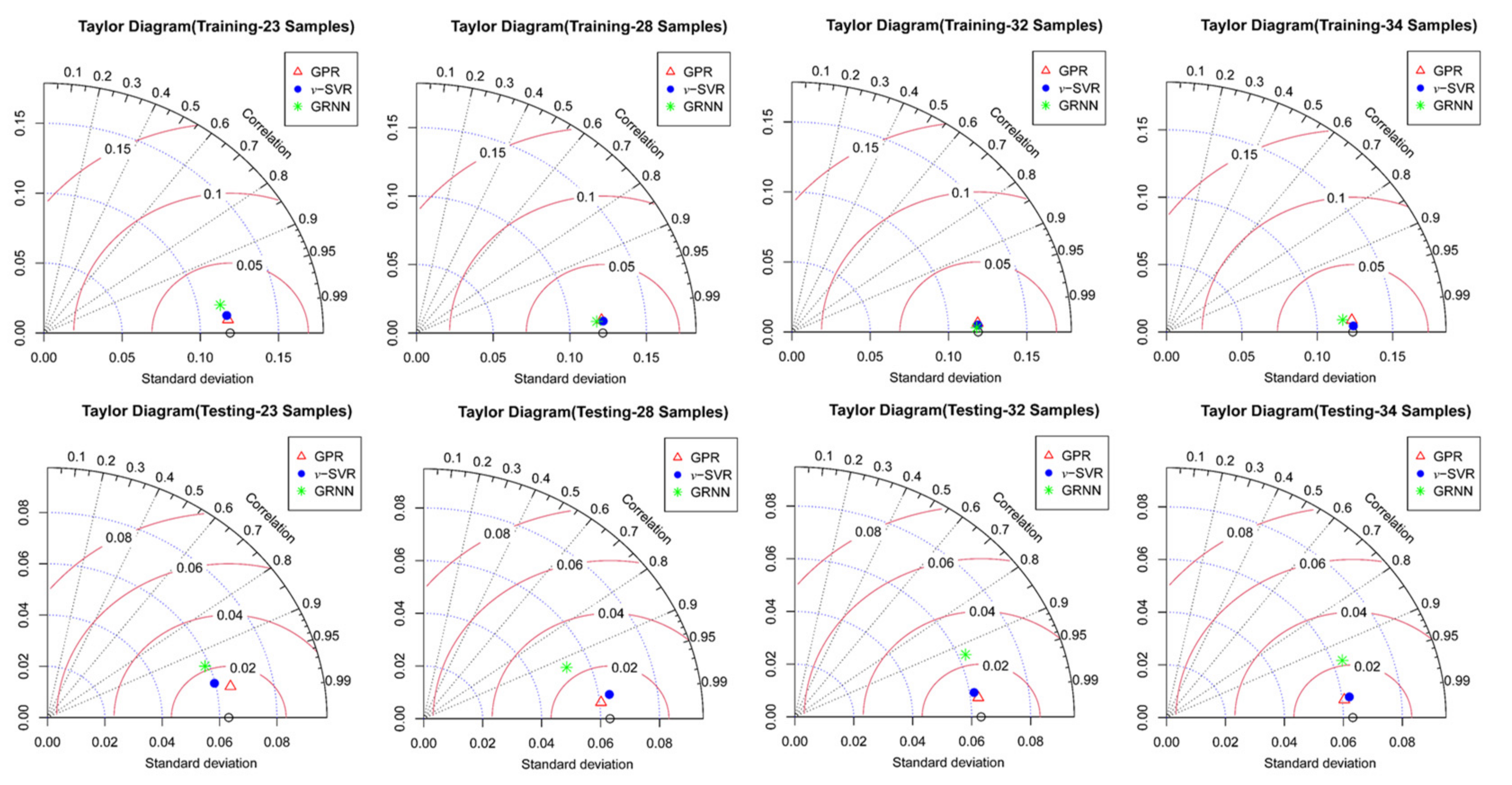
Achieving a precise RSM for a complicated slope has been a hot topic in recent decades. Machine-learning-based RSMs are demonstrating promising applicability in addressing such issues with the development of artificial intelligence. Accordingly, we present a dynamic WOA-GPR RSM to analyze landslide reliability in this study. An iterative procedure based on uniform design is adopted to reduce the number of sampling points. Then we implement an extensive comparison (over seven indices) to assess the performances of GRNN,
v-SVR, and GPR-based RSMs through two practical landslides. As shown in
Table 4 and
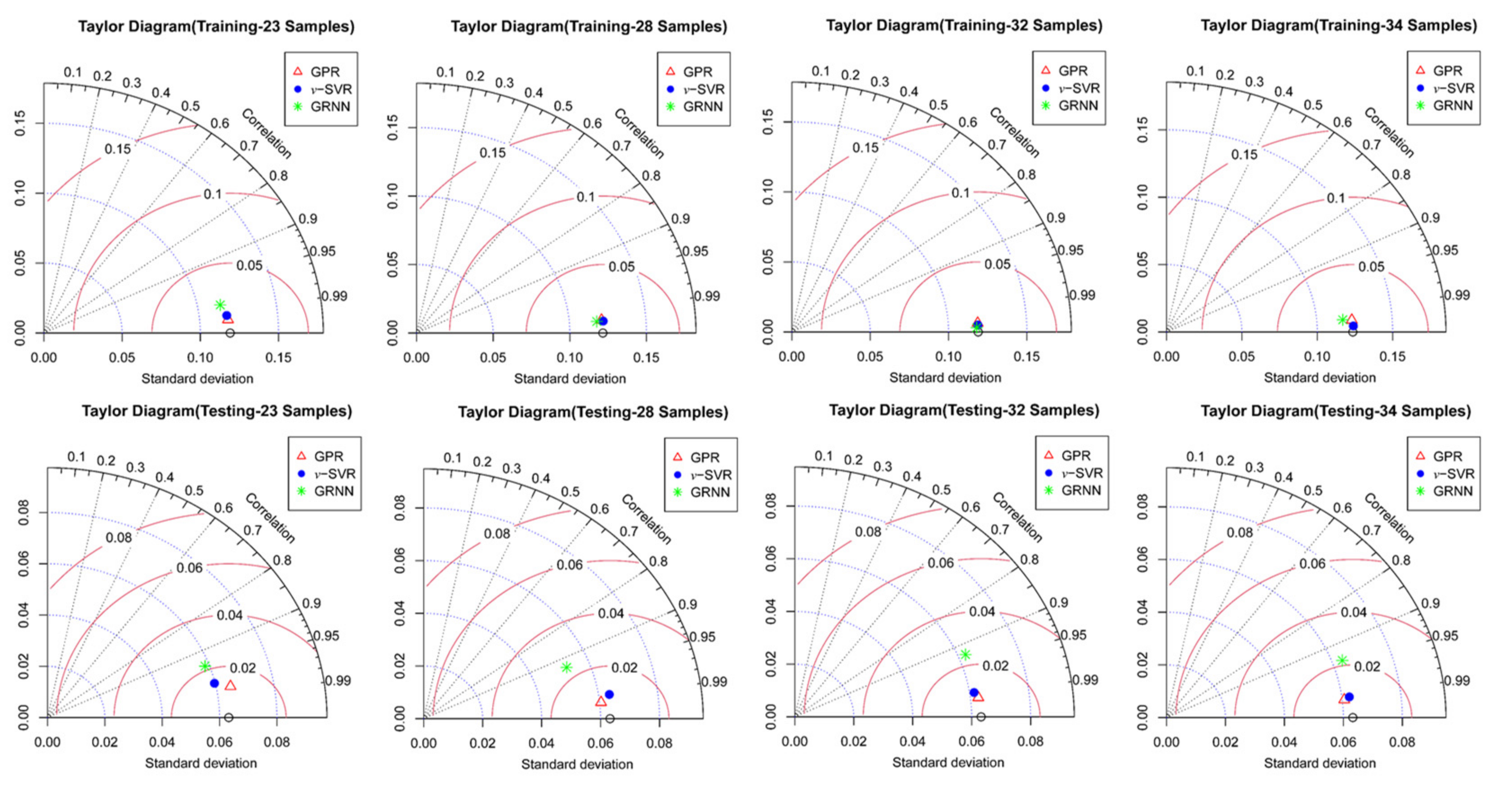
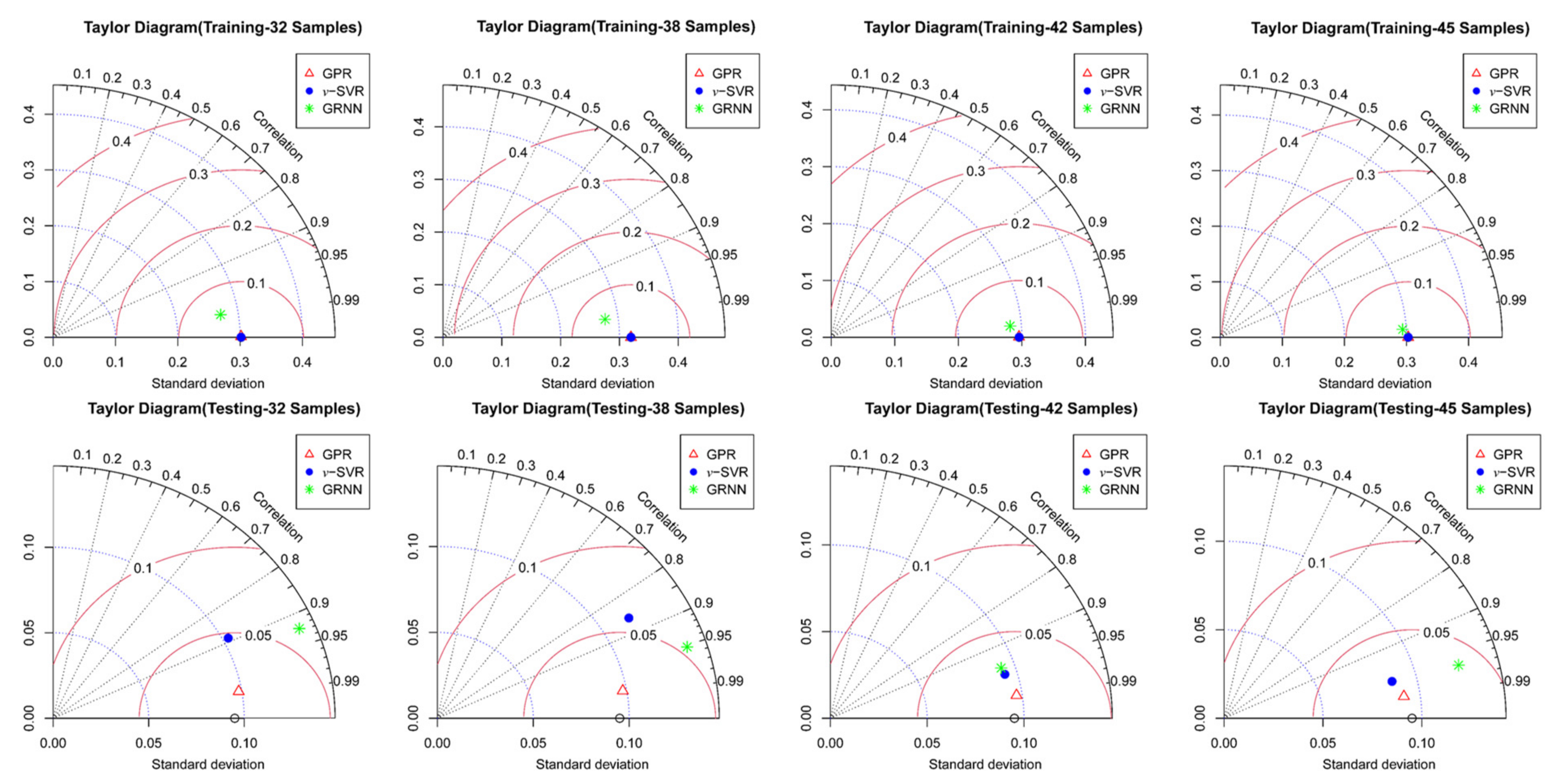
Table 9, it is clear that the presented technique performs better compared to the other two techniques in terms of the indices illustrated in Equation (23) to Equation (29). At the same time, the Taylor diagram, which offers the degree of approximation between the actual and predicted data in terms of standard deviation and their correlation, is also plotted for training and testing datasets as illustrated in
Figure 8 and
Figure 13. According to the results and analysis in
Section 3, the WOA-GPR-based RSM yields the best predictions as compared with the GRNN and
v-SVR-based models. Besides, slight deviations in failure probability obtained from our method and MCS are reported in both cases. In summary, our approach is superior to the other models discussed with respect to accuracy.
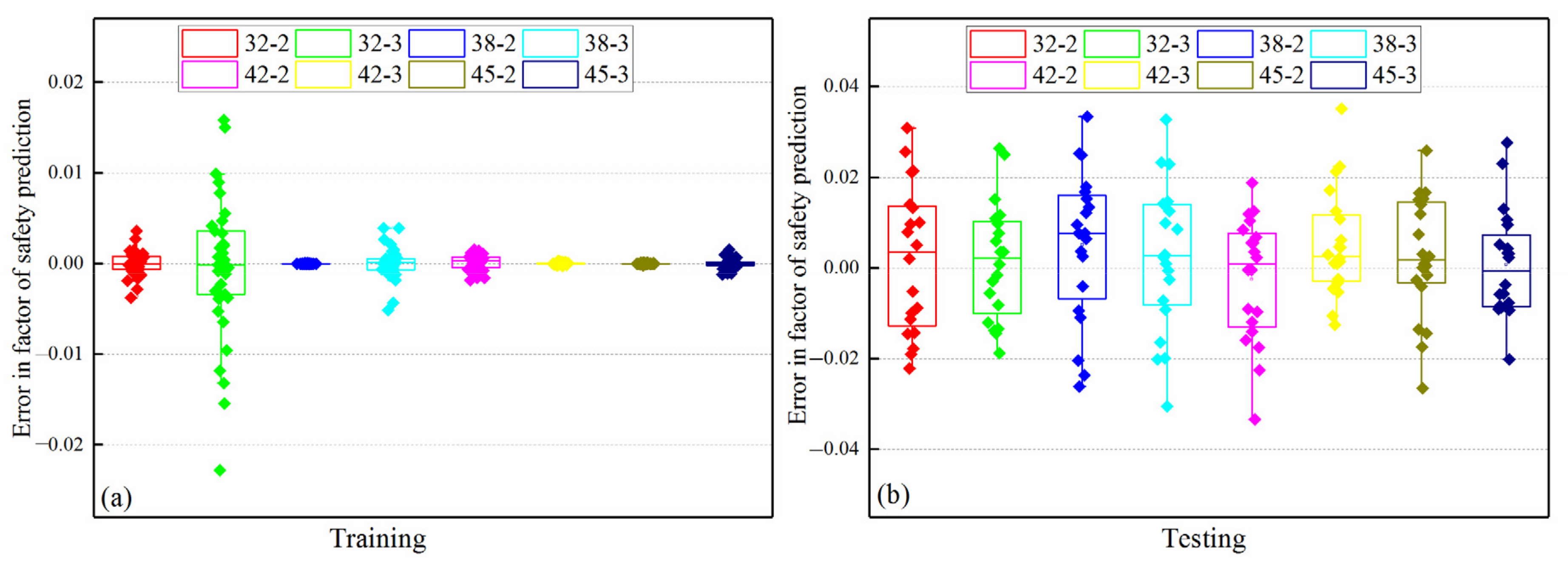
To achieve rapid results, we implement an iterative algorithm based on a uniform design. Notably, the results of the two cases show that the number of training samples is reduced to a relatively small level, i.e., 42 samples for Case 1 and 28 samples for Case 2. This means that for issues with three and four random variables, our study reduces 17 and 18 samples as compared to the studies in [
22,
26,
29,
30,
42], which need 45 and 60 samples to construct an accurate RSM, respectively. Accordingly, the iterative procedure can effectively improve the efficiency of our method. Besides, considering the approximate accuracy, our model requires much fewer sampling points to establish an accurate RSM for both cases. This demonstrates that the WOA-GPR model is efficient for landslide reliability analysis. From what has been discussed above, we can reasonably conclude that our approach performs better in comparison with the GRNN and
v-SVR models in terms of computation effort.
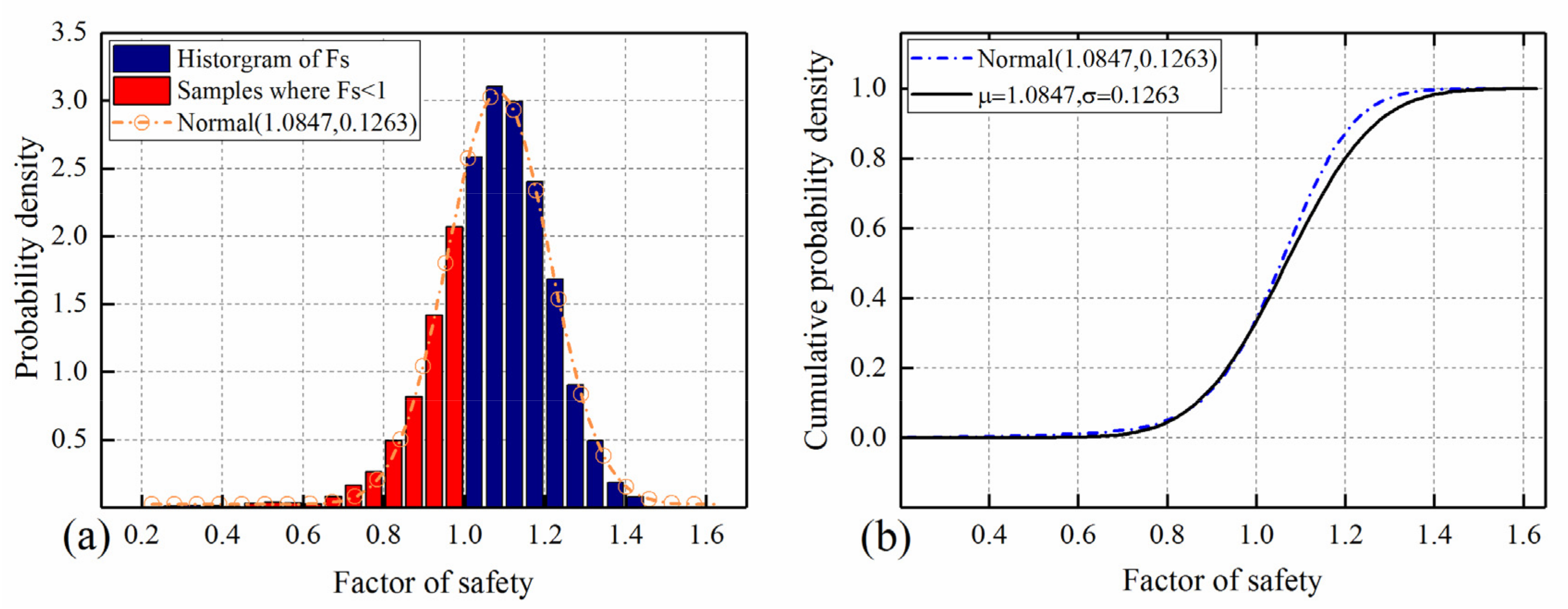
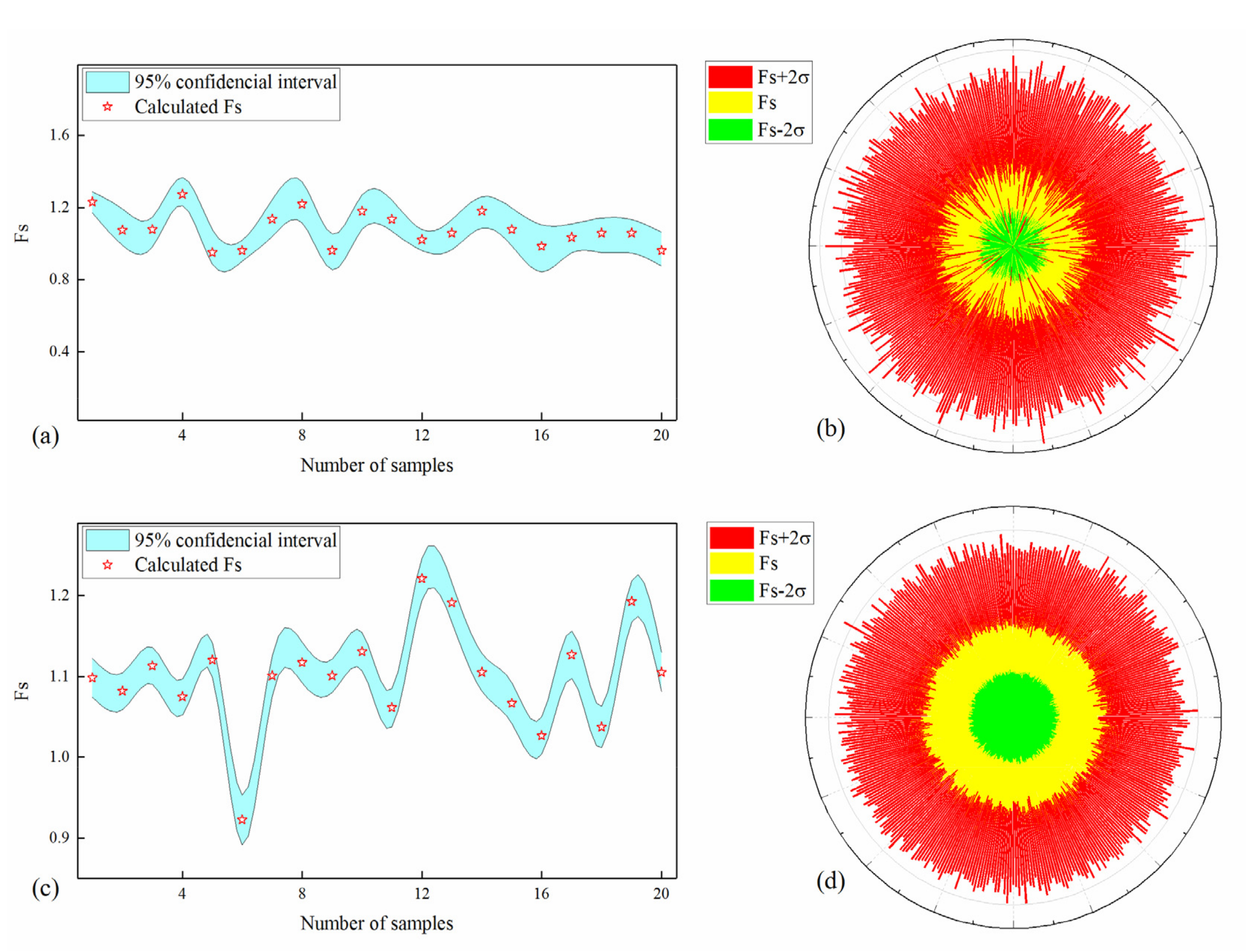
Further, as compared with the other methods, our study can not only provide the factor of safety, but also offers sufficient confidence levels.
Figure 16a,c shows the factor of safety (
) calculated from SRM and 95% confidence levels of
obtained from dynamic WOA-GPR RSM for the two landslides.
Figure 16b,d presents the
Fs and the corresponding 95% confidential level determined by the proposed model when combined with MCS with 5000 samples for both cases. As shown, all the values of
Fs fall into the 95% confidential interval obtained from the dynamic WOA-GPR RSM using the uniform design.
Additionally, the uncertainty in the water table level appears to have a larger contribution to the increase in failure probability in our case studies. In other words, a small failure probability is achieved in the absence of water table level uncertainty, which is in agreement with the previous literature reported in [
59]. We may obtain an optimistic assessment of landslide stability and fail to predict future landslide occurrence. Hence, for slopes in which it is hard to determine their water table level, it is reliable to consider such uncertainty, especially in high mountainous areas where people and equipment find it hard to reach.
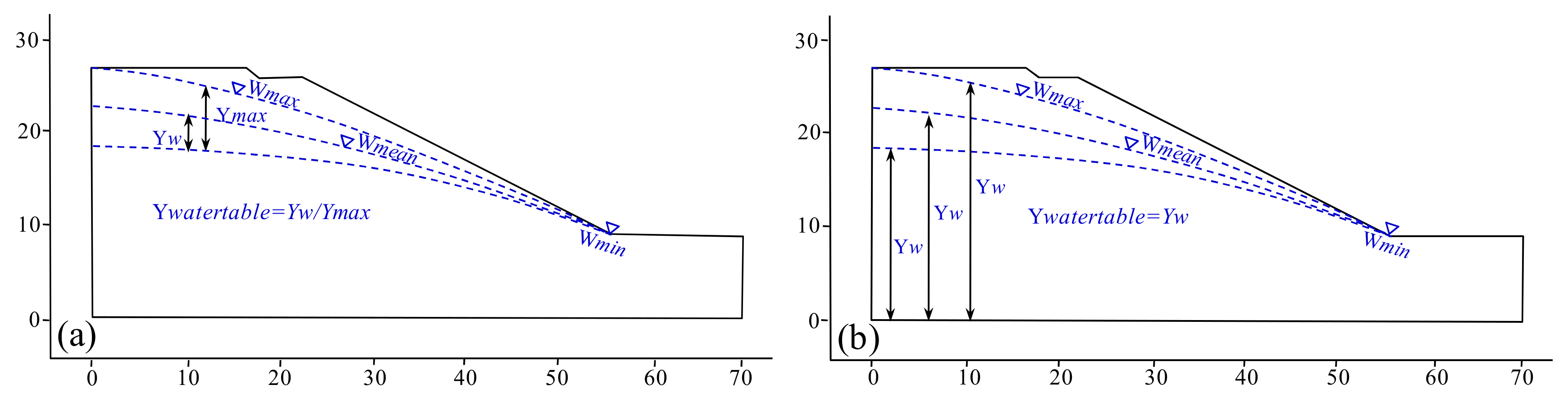
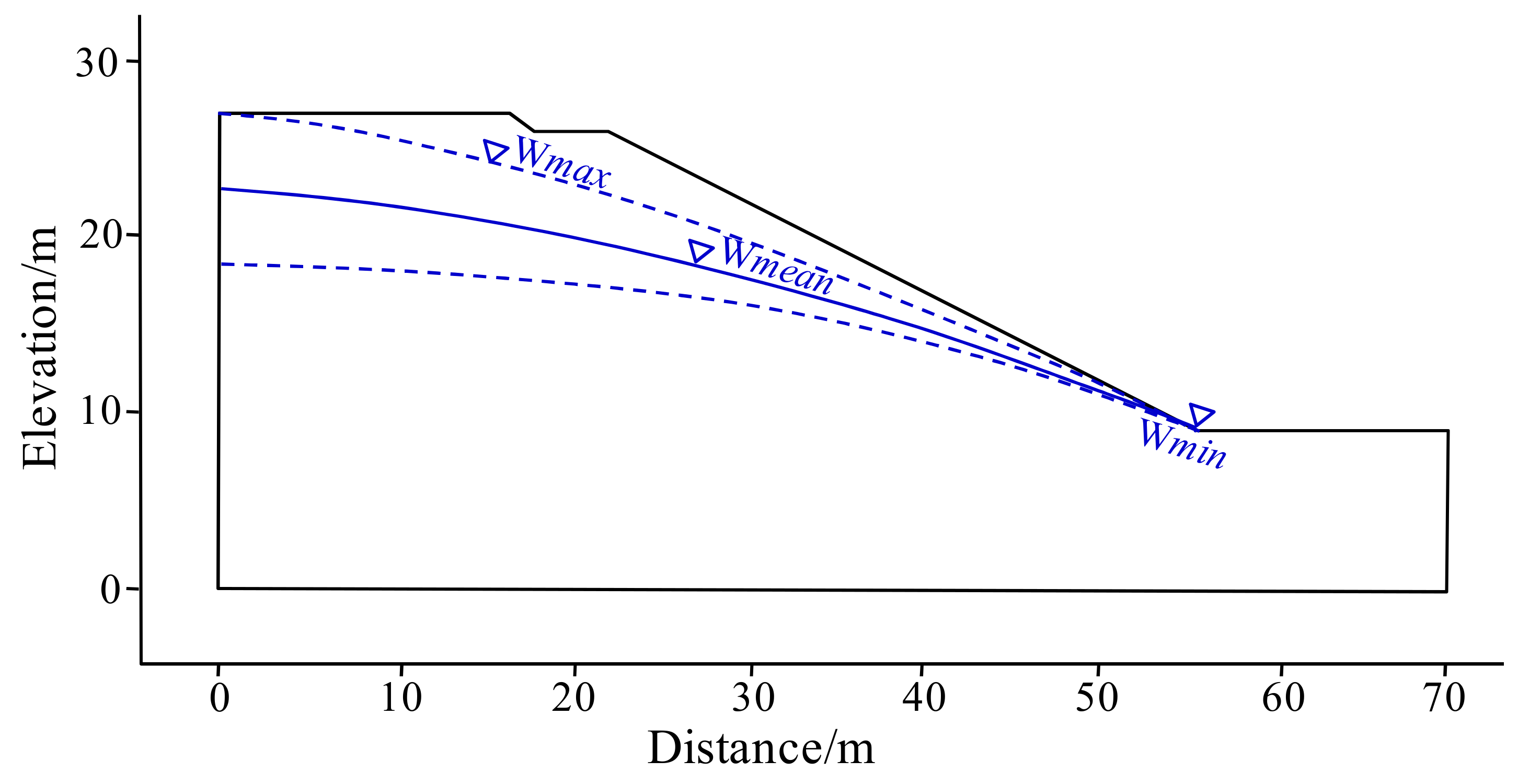
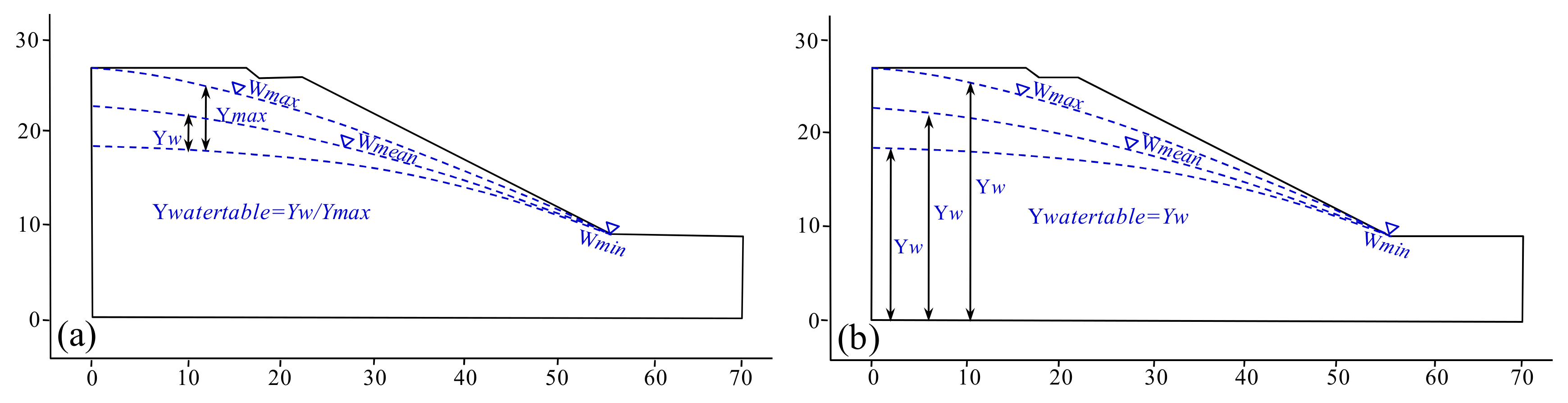
Besides, the failure probability of the Lodalen slope achieved in this paper is slightly higher than the value of 26.06% determined by Shadabfar et al., (2020) [
59]. This might be ascribed to the factor of safety obtained from different methods of Simplified Bishop and SRM, or to the dissimilar application of the water table level as shown in
Figure 17.
We also investigate the impact of the type of groundwater level distribution on failure probability.
Table 12 shows the values for the water table level with assumed distribution functions for both slopes. Results obtained from our model with a uniform distribution are different from those determined by the other three distribution functions. Besides, the approximate failure probability is determined by the proposed method with the normal, lognormal, and triangular distribution functions, where the result with a normal distribution offers a more optimistic assessment of the landslide stability.
In this study, since the reliability evaluation based on MCS is independent of the factor of slope safety using SRM, other available methods such as LEM and the Simplified Bishop can also be adopted to implement the developed technique. Besides, the required samples are found to be 42 for Case 1 with four random variables, and the samples are 28 for Case 2 with three random variables. For problems with more than five random variables, experimental results show that it is quite possible to increase the times of cycles to implement probabilistic analysis, which will be further studied in the future.
5. Conclusions
Accurate and efficient slope stability analysis can improve the accuracy of landslide early warnings, thus reducing the casualties and damage to properties from such disasters. For decades, machine-learning-based RSMs have been developed for probabilistic analysis of landslides, including ANN, SVM, KELM, and so on. However, it is still a challenging task to determine an efficient method from the machine-learning-based RSMs, which would help researchers accurately analyze slope reliability and thus help benefit human lives and property safety. Besides, most studies rarely consider the uncertainty in the underground water table, which has become a crucial element absent in slope stability assessment.
One of the contributions of this study is the development of a new method that adds the uncertainty in groundwater level to existing approaches of slope reliability analysis and facilitates the researcher to uncover the hidden patterns and regularities in the deformation of landslides. We adopted a uniform design to construct a dynamic WOA-GPR-based RSM model. Two practical landslides, i.e., the Lodalen slope and Dangchuan landslide, were chosen to verify the applicability of the developed technique. For the case studies illustrated in the study, we found that the water table level uncertainty made higher contributions to offering reliable results. Besides, with the aid of a uniform design and a new iterative dynamic RSM, we are able to save large amounts of time in terms of reducing the samples generated for the construction of the WOA-GPR-based RSM. We are also able to reduce the number of iterative times the RSM is established. Considering the overall performance, our method has proven to be the best model, since it produced higher results with lower computation time, and significantly outperformed the GRNN and v-SVR-based RSMs. The technique developed in this research is a new hybrid approach for landslide stability analysis, which combines the merits of uniform design and WOA and GPR models. The results in this paper show the potential usability of the developed method in evaluating the stability of slopes that are difficult in terms of determining their underground water levels, especially in high mountainous areas where people and equipment find it hard to reach. The novel technique can also be applied to similar geological scenarios for landslide risk reduction.
In conclusion, machine-learning-based RSMs show promising applicability in landslide reliability analysis. The assessment of such hazards is vital for landslide mitigation and prevention. The results achieved can help researchers to better understand the influences of different types of uncertainties encountered in landslides, and thus help disaster emergency management departments to implement effective measures to reduce the potential risks to an acceptable degree. In the future, methods to address problems with more than five random variables still need to be validated through different cases by investigating proper measures such as the increase in iterations. In addition, in order to realize early landslide warnings, real-time monitoring data of a higher resolution will be integrated into the WOA-GPR framework in the future.














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}