
Estimating Processing Tomato Water Consumption, Leaf Area Index, and Height Using Sentinel-2 and VENµS Imagery

 ,
,  ,
,  and
and
Abstract
1. Introduction
2. Materials and Methods
2.1. Test Sites and Field Measurements
2.2. Agro-Meteorological Measurements
2.3. Satellite Imagery
2.4. Vegetation Indices and Model Validation
3. Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index Name | Formula | Reference | |
|---|---|---|---|
| 1 | Normalised Difference Vegetation Index (NDVI) | [61] | |
| 2 | Global Environmental Monitoring Index (GEMI) | where ή = | [62] |
| 3 | Weighted Difference Vegetation Index (WDVI) | where: S is the slope of the soil line. | [63] |
| 4 | Green Normalized Difference Vegetation Index (GNDVI) | [64] | |
| 5 | Modified Soil Adjusted Vegetation Index (MSAVI) | where: L = where s is the slope of the soil line from a plot of red versus near infrared brightness values | [65] |
| 6 | Difference Vegetation Index (DVI) | [61] | |
| 7 | MERIS terrestrial chlorophyll index (MTCI) | [66] | |
| 8 | Infrared Percentage Vegetation Index (IPVI) | [67] | |
| 9 | Inverted Red Edge Chlorophyll Index (IRECI) | [68] | |
| 10 | Sentinel-2 Red Edge Position (S2REP) | [68] | |
| 11 | Red Edge In-flection Point (REIP) | [69] | |
| 12 | Soil Adjusted Vegetation Index (SAVI) | [70] | |
| 13 | Transformed Normalized Difference Vegetation Index (TNDVI) | [71] |
Appendix B
| Vegetation Index | Dataset | LAI | Height | Kc | |||
|---|---|---|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE (cm) | R2 | RMSE | ||
| NDVI | Sentinel-2 Gadash 2018 | 9 | |||||
| Sentinel-2 Gadash 2019 | 1.5 | 11 | 0.0919 | ||||
| Sentinel-2 Gadot 2019 | 1.5 | 5 | 0.0961 | ||||
| Sentinel-2 Gadot 2020 | 1.2 | 9 | 0.0558 | ||||
| All seasons | 0.6594 | 1.4 | 0.6387 | 9 | 0.7524 | 0.0826 | |
| MTCI | Sentinel-2 Gadash 2018 | 12 | |||||
| Sentinel-2 Gadash 2019 | 2.0 | 11 | 0.1608 | ||||
| Sentinel-2 Gadot 2019 | 2.6 | 11 | 0.1804 | ||||
| Sentinel-2 Gadot 2020 | 2.1 | 8 | 0.0724 | ||||
| All seasons | 0.16 | 2.3 | 0.5216 | 10 | 0.2653 | 0.1433 | |
| IPVI | Sentinel-2 Gadash 2018 | 9 | |||||
| Sentinel-2 Gadash 2019 | 1.5 | 11 | 0.0919 | ||||
| Sentinel-2 Gadot 2019 | 1.5 | 5 | 0.0961 | ||||
| Sentinel-2 Gadot 2020 | 1.2 | 9 | 0.0558 | ||||
| All seasons | 0.6594 | 1.4 | 0.6387 | 9 | 0.7524 | 0.0826 | |
| IRECI | Sentinel-2 Gadash 2018 | 9 | |||||
| Sentinel-2 Gadash 2019 | 1.1 | 8 | 0.1084 | ||||
| Sentinel-2 Gadot 2019 | 1.7 | 6 | 0.1646 | ||||
| Sentinel-2 Gadot 2020 | 1.2 | 6 | 0.0674 | ||||
| All seasons | 0.6927 | 1.4 | 0.7688 | 7 | 0.4636 | 0.1233 | |
| S2REP | Sentinel-2 Gadash 2018 | 11 | |||||
| Sentinel-2 Gadash 2019 | 2.1 | 12 | 0.1619 | ||||
| Sentinel-2 Gadot 2019 | 2.5 | 10 | 0.1750 | ||||
| Sentinel-2 Gadot 2020 | 2.1 | 9 | 0.0730 | ||||
| All seasons | 0.1642 | 2.3 | 0.5359 | 10 | 0.2893 | 0.1411 | |
| REIP | Sentinel-2 Gadash 2018 | 16 | |||||
| Sentinel-2 Gadash 2019 | 2.1 | 14 | 0.1619 | ||||
| Sentinel-2 Gadot 2019 | 2.5 | 8 | 0.1750 | ||||
| Sentinel-2 Gadot 2020 | 2.1 | 10 | 0.0730 | ||||
| All seasons | 0.1642 | 2.3 | 0.3176 | 12 | 0.2893 | 0.1411 | |
| GNDVI | Sentinel-2 Gadash 2018 | 10 | |||||
| Sentinel-2 Gadash 2019 | 1.6 | 12 | 0.1138 | ||||
| Sentinel-2 Gadot 2019 | 1.6 | 6 | 0.1287 | ||||
| Sentinel-2 Gadot 2020 | 1.4 | 9 | 0.0660 | ||||
| All seasons | 0.6093 | 1.5 | 0.6314 | 9 | 0.6048 | 0.1059 | |
| TNDVI | Sentinel-2 Gadash 2018 | 9 | |||||
| Sentinel-2 Gadash 2019 | 1.6 | 12 | 0.0955 | ||||
| Sentinel-2 Gadot 2019 | 1.5 | 6 | 0.0931 | ||||
| Sentinel-2 Gadot 2020 | 1.3 | 9 | 0.0538 | ||||
| All seasons | 0.6456 | 1.5 | 0.6222 | 9 | 0.7572 | 0.0818 | |
Appendix C
| Vegetation Index | Dataset | LAI | Height | Kc | |||
|---|---|---|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE (cm) | R2 | RMSE | ||
| NDVI | Sentinel-2 Gadash 2018 | 9 | |||||
| VENµS Gadash 2018 | 9 | ||||||
| Sentinel-2 Gadash 2019 | 1.5 | 11 | 0.0939 | ||||
| VENµS Gadash 2019 | 1.0 | 10 | 0.0718 | ||||
| Sentinel-2 Gadot 2019 | 1.5 | 5 | 0.0887 | ||||
| VENµS Gadot 2019 | 1.6 | 8 | 0.1115 | ||||
| Sentinel-2 Gadot 2020 | 1.2 | 9 | 0.0700 | ||||
| VENµS Gadot 2020 | 1.2 | 8 | 0.0844 | ||||
| All seasons | 0.8099 | 1.4 | 0.6885 | 9 | 0.7009 | 0.0905 | |
| MTCI | Sentinel-2 Gadash 2018 | 17 | |||||
| VENµS Gadash 2018 | 11 | ||||||
| Sentinel-2 Gadash 2019 | 1.6 | 6 | 0.1439 | ||||
| VENµS Gadash 2019 | 2.1 | 13 | 0.1869 | ||||
| Sentinel-2 Gadot 2019 | 2.8 | 14 | 0.2325 | ||||
| VENµS Gadot 2019 | 2.8 | 10 | 0.1845 | ||||
| Sentinel-2 Gadot 2020 | 2.4 | 10 | 0.0869 | ||||
| VENµS Gadot 2020 | 2.1 | 11 | 0.1559 | ||||
| All seasons | 0.0804 | 2.4 | 0.4062 | 12 | 0.2945 | 0.1750 | |
| IPVI | Sentinel-2 Gadash 2018 | 9 | |||||
| VENµS Gadash 2018 | 9 | ||||||
| Sentinel-2 Gadash 2019 | 1.5 | 11 | 0.0939 | ||||
| VENµS Gadash 2019 | 1.0 | 10 | 0.0718 | ||||
| Sentinel-2 Gadot 2019 | 1.5 | 5 | 0.0887 | ||||
| VENµS Gadot 2019 | 1.6 | 8 | 0.1114 | ||||
| Sentinel-2 Gadot 2020 | 1.2 | 9 | 0.0701 | ||||
| VENµS Gadot 2020 | 1.2 | 8 | 0.0841 | ||||
| All seasons | 0.7012 | 1.4 | 0.687 | 9 | 0.8103 | 0.0904 | |
| IRECI | Sentinel-2 Gadash 2018 | 10 | |||||
| VENµS Gadash 2018 | 9 | ||||||
| Sentinel-2 Gadash 2019 | 1.0 | 7 | 0.0964 | ||||
| VENµS Gadash 2019 | 0.9 | 7 | 0.1378 | ||||
| Sentinel-2 Gadot 2019 | 1.8 | 7 | 0.1753 | ||||
| VENµS Gadot 2019 | 1.7 | 6 | 0.1605 | ||||
| Sentinel-2 Gadot 2020 | 1.0 | 5 | 0.0670 | ||||
| VENµS Gadot 2020 | 1.7 | 9 | 0.1493 | ||||
| All seasons | 0.661 | 1.5 | 0.7684 | 7 | 0.5179 | 0.1447 | |
| S2REP | Sentinel-2 Gadash 2018 | 12 | |||||
| VENµS Gadash 2018 | 10 | ||||||
| Sentinel-2 Gadash 2019 | 1.9 | 9 | 0.1456 | ||||
| VENµS Gadash 2019 | 2.0 | 11 | 0.1538 | ||||
| Sentinel-2 Gadot 2019 | 2.8 | 15 | 0.2199 | ||||
| VENµS Gadot 2019 | 2.7 | 9 | 0.1752 | ||||
| Sentinel-2 Gadot 2020 | 2.1 | 8 | 0.0790 | ||||
| VENµS Gadot 2020 | 2.0 | 10 | 0.1514 | ||||
| All seasons | 0.1541 | 2.3 | 0.5588 | 10 | 0.4066 | 0.1616 | |
| REIP | Sentinel-2 Gadash 2018 | 14 | |||||
| VENµS Gadash 2018 | 13 | ||||||
| Sentinel-2 Gadash 2019 | 2.5 | 18 | 0.2019 | ||||
| VENµS Gadash 2019 | 1.8 | 8 | 0.1307 | ||||
| Sentinel-2 Gadot 2019 | 2.4 | 8 | 0.1611 | ||||
| VENµS Gadot 2019 | 2.8 | 11 | 0.1940 | ||||
| Sentinel-2 Gadot 2020 | 2.1 | 13 | 0.1398 | ||||
| VENµS Gadot 2020 | 2.0 | 9 | 0.1235 | ||||
| All seasons | 0.1509 | 2.3 | 0.4815 | 11 | 0.4223 | 0.1591 | |
| GNDVI | Sentinel-2 Gadash 2018 | 11 | |||||
| VENµS Gadash 2018 | 9 | ||||||
| Sentinel-2 Gadash 2019 | 1.3 | 10 | 0.0963 | ||||
| VENµS Gadash 2019 | 1.0 | 9 | 0.0779 | ||||
| Sentinel-2 Gadot 2019 | 1.9 | 7 | 0.1411 | ||||
| VENµS Gadot 2019 | 1.7 | 7 | 0.1048 | ||||
| Sentinel-2 Gadot 2020 | 1.3 | 8 | 0.0752 | ||||
| VENµS Gadot 2020 | 1.5 | 8 | 0.1075 | ||||
| All seasons | 0.6477 | 1.5 | 0.6934 | 9 | 0.7631 | 0.1014 | |
| TNDVI | Sentinel-2 Gadash 2018 | 9 | |||||
| VENµS Gadash 2018 | 9 | ||||||
| Sentinel-2 Gadash 2019 | 1.6 | 12 | 0.0992 | ||||
| VENµS Gadash 2019 | 1.1 | 10 | 0.0711 | ||||
| Sentinel-2 Gadot 2019 | 1.5 | 6 | 0.0849 | ||||
| VENµS Gadot 2019 | 1.6 | 8 | 0.1101 | ||||
| Sentinel-2 Gadot 2020 | 1.3 | 9 | 0.0675 | ||||
| VENµS Gadot 2020 | 1.1 | 8 | 0.1006 | ||||
| All seasons | 0.6899 | 1.4 | 0.6706 | 9 | 0.7978 | 0.0934 | |
Appendix D
| Vegetation Index | Dataset | LAI | Height | Kc | |||
|---|---|---|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE (cm) | R2 | RMSE | ||
| NDVI | Sentinel-2 Gadash 2018 | 7 | |||||
| VENµS Gadash 2018 | 12 | ||||||
| Sentinel-2 Gadash 2019 | 2.0 | 14 | 0.1223 | ||||
| VENµS Gadash 2019 | 1.0 | 9 | 0.0665 | ||||
| Sentinel-2 Gadot 2019 | 1.2 | 5 | 0.0662 | ||||
| VENµS Gadot 2019 | 2.0 | 10 | 0.1461 | ||||
| Sentinel-2 Gadot 2020 | 1.4 | 10 | 0.0926 | ||||
| VENµS Gadot 2020 | 1.2 | 8 | 0.0863 | ||||
| All seasons | 0.623 | 1.5 | 0.6156 | 10 | 0.743 | 0.1053 | |
| MTCI | Sentinel-2 Gadash 2018 | 12 | |||||
| VENµS Gadash 2018 | 14 | ||||||
| Sentinel-2 Gadash 2019 | 2.1 | 12 | 0.1649 | ||||
| VENµS Gadash 2019 | 1.5 | 6 | 0.1368 | ||||
| Sentinel-2 Gadot 2019 | 2.6 | 10 | 0.1802 | ||||
| VENµS Gadot 2019 | 2.7 | 11 | 0.1823 | ||||
| Sentinel-2 Gadot 2020 | 2.0 | 9 | 0.0906 | ||||
| VENµS Gadot 2020 | 2.0 | 12 | 0.1561 | ||||
| All seasons | 0.2094 | 2.2 | 0.5212 | 11 | 0.4222 | 0.1583 | |
| IPVI | Sentinel-2 Gadash 2018 | 7 | |||||
| VENµS Gadash 2018 | 11 | ||||||
| Sentinel-2 Gadash 2019 | 2.1 | 14 | 0.1253 | ||||
| VENµS Gadash 2019 | 0.7 | 7 | 0.0906 | ||||
| Sentinel-2 Gadot 2019 | 1.2 | 5 | 0.0635 | ||||
| VENµS Gadot 2019 | 1.9 | 9 | 0.1431 | ||||
| Sentinel-2 Gadot 2020 | 1.5 | 10 | 0.0971 | ||||
| VENµS Gadot 2020 | 1.2 | 8 | 0.0904 | ||||
| All seasons | 0.646 | 1.5 | 0.6454 | 9 | 0.7233 | 0.1092 | |
| IRECI | Sentinel-2 Gadash 2018 | 7 | |||||
| VENµS Gadash 2018 | 11 | ||||||
| Sentinel-2 Gadash 2019 | 1.4 | 10 | 0.0916 | ||||
| VENµS Gadash 2019 | 0.8 | 7 | 0.1394 | ||||
| Sentinel-2 Gadot 2019 | 1.4 | 6 | 0.1527 | ||||
| VENµS Gadot 2019 | 1.9 | 8 | 0.1713 | ||||
| Sentinel-2 Gadot 2020 | 1.9 | 11 | 0.1588 | ||||
| VENµS Gadot 2020 | 1.3 | 5 | 0.1125 | ||||
| All seasons | 0.6527 | 1.5 | 0.7349 | 8 | 0.5139 | 0.1453 | |
| S2REP | Sentinel-2 Gadash 2018 | 9 | |||||
| VENµS Gadash 2018 | 12 | ||||||
| Sentinel-2 Gadash 2019 | 2.3 | 16 | 0.1905 | ||||
| VENµS Gadash 2019 | 1.7 | 7 | 0.1186 | ||||
| Sentinel-2 Gadot 2019 | 2.5 | 8 | 0.1636 | ||||
| VENµS Gadot 2019 | 2.7 | 10 | 0.1556 | ||||
| Sentinel-2 Gadot 2020 | 2.1 | 11 | 0.1208 | ||||
| VENµS Gadot 2020 | 1.9 | 8 | 0.0978 | ||||
| All seasons | 0.1992 | 2.3 | 0.5893 | 10 | 0.5709 | 0.1366 | |
| REIP | Sentinel-2 Gadash 2018 | 11 | |||||
| VENµS Gadash 2018 | 15 | ||||||
| Sentinel-2 Gadash 2019 | 2.8 | 22 | 0.2433 | ||||
| VENµS Gadash 2019 | 1.6 | 7 | 0.1249 | ||||
| Sentinel-2 Gadot 2019 | 2.4 | 10 | 0.1658 | ||||
| VENµS Gadot 2019 | 2.8 | 11 | 0.1785 | ||||
| Sentinel-2 Gadot 2020 | 2.3 | 14 | 0.1563 | ||||
| VENµS Gadot 2020 | 2.1 | 9 | 0.0887 | ||||
| All seasons | 0.1446 | 2.3 | 0.4117 | 12 | 0.4658 | 0.1529 | |
| GNDVI | Sentinel-2 Gadash 2018 | 7 | |||||
| VENµS Gadash 2018 | 12 | ||||||
| Sentinel-2 Gadash 2019 | 2.3 | 16 | 0.1527 | ||||
| VENµS Gadash 2019 | 0.6 | 7 | 0.1004 | ||||
| Sentinel-2 Gadot 2019 | 1.3 | 5 | 0.0980 | ||||
| VENµS Gadot 2019 | 2.1 | 10 | 0.1518 | ||||
| Sentinel-2 Gadot 2020 | 1.8 | 11 | 0.1216 | ||||
| VENµS Gadot 2020 | 1.4 | 7 | 0.0952 | ||||
| All seasons | 0.5782 | 1.6 | 0.6342 | 9 | 0.6596 | 0.1216 | |
| TNDVI | Sentinel-2 Gadash 2018 | 7 | |||||
| VENµS Gadash 2018 | 11 | ||||||
| Sentinel-2 Gadash 2019 | 2.2 | 15 | 0.1303 | ||||
| VENµS Gadash 2019 | 0.7 | 8 | 0.0858 | ||||
| Sentinel-2 Gadot 2019 | 1.2 | 5 | 0.0588 | ||||
| VENµS Gadot 2019 | 1.9 | 9 | 0.1379 | ||||
| Sentinel-2 Gadot 2020 | 1.5 | 10 | 0.0940 | ||||
| VENµS Gadot 2020 | 1.2 | 8 | 0.0849 | ||||
| All seasons | 0.6401 | 1.5 | 0.6354 | 9 | 0.7432 | 0.1052 | |
Appendix E
| Vegetation Index | Dataset | LAI | Height | Kc | |||
|---|---|---|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE (cm) | R2 | RMSE | ||
| NDVI | Sentinel-2 Gadash 2018 | −2 | |||||
| VENµS Gadash 2018 | 3 | ||||||
| Sentinel-2 Gadash 2019 | 0.5 | 3 | 0.0284 | ||||
| VENµS Gadash 2019 | 0.0 | 0 | −0.0054 | ||||
| Sentinel-2 Gadot 2019 | −0.3 | 0 | −0.0226 | ||||
| VENµS Gadot 2019 | 0.4 | 2 | 0.0346 | ||||
| Sentinel-2 Gadot 2020 | 0.2 | 1 | 0.0226 | ||||
| VENµS Gadot 2020 | 0.0 | 0 | 0.0019 | ||||
| All seasons | −0.1869 * | 0.2 | −0.0729 * | 1 | 0.0421 * | 0.0147 | |
| MTCI | Sentinel-2 Gadash 2018 | −6 | |||||
| VENµS Gadash 2018 | 3 | ||||||
| Sentinel-2 Gadash 2019 | 0.5 | 6 | 0.0210 | ||||
| VENµS Gadash 2019 | −0.6 | −7 | −0.0501 | ||||
| Sentinel-2 Gadot 2019 | −0.1 | −5 | −0.0523 | ||||
| VENµS Gadot 2019 | −0.1 | 1 | −0.0022 | ||||
| Sentinel-2 Gadot 2020 | −0.4 | −1 | 0.0038 | ||||
| VENµS Gadot 2020 | −0.1 | 1 | 0.0002 | ||||
| All seasons | 0.129 * | −0.2 | 0.115 * | −1 | 0.1277 * | −0.0166 | |
| IPVI | Sentinel-2 Gadash 2018 | −2 | |||||
| VENµS Gadash 2018 | 2 | ||||||
| Sentinel-2 Gadash 2019 | 0.6 | 3 | 0.0314 | ||||
| VENµS Gadash 2019 | −0.4 | −2 | 0.0188 | ||||
| Sentinel-2 Gadot 2019 | −0.3 | 0 | −0.0252 | ||||
| VENµS Gadot 2019 | 0.3 | 2 | 0.0317 | ||||
| Sentinel-2 Gadot 2020 | 0.2 | 1 | 0.0270 | ||||
| VENµS Gadot 2020 | 0.0 | 0 | 0.0063 | ||||
| All seasons | −0.0552 * | 0.1 | −0.0416 * | 1 | −0.087 * | 0.0188 | |
| IRECI | Sentinel-2 Gadash 2018 | −3 | |||||
| VENµS Gadash 2018 | 3 | ||||||
| Sentinel-2 Gadash 2019 | 0.4 | 3 | −0.0048 | ||||
| VENµS Gadash 2019 | −0.1 | 0 | 0.0016 | ||||
| Sentinel-2 Gadot 2019 | −0.4 | −1 | −0.0225 | ||||
| VENµS Gadot 2019 | 0.2 | 2 | 0.0108 | ||||
| Sentinel-2 Gadot 2020 | 0.8 | 7 | 0.0917 | ||||
| VENµS Gadot 2020 | −0.4 | −3 | −0.0368 | ||||
| All seasons | −0.0083 | 0.0 | −0.0335 | 1 | −0.004 | 0.0006 | |
| S2REP | Sentinel-2 Gadash 2018 | -3 | |||||
| VENµS Gadash 2018 | 2 | ||||||
| Sentinel-2 Gadash 2019 | 0.5 | 7 | 0.0449 | ||||
| VENµS Gadash 2019 | −0.3 | −3 | −0.0352 | ||||
| Sentinel-2 Gadot 2019 | −0.3 | −6 | −0.0563 | ||||
| VENµS Gadot 2019 | 0.0 | 1 | −0.0196 | ||||
| Sentinel-2 Gadot 2020 | 0.0 | 3 | 0.0418 | ||||
| VENµS Gadot 2020 | 0.0 | −2 | −0.0536 | ||||
| All seasons | 0.0451 | −0.1 | 0.0305 | 0 | 0.1643 * | −0.0250 | |
| REIP | Sentinel-2 Gadash 2018 | −3 | |||||
| VENµS Gadash 2018 | 2 | ||||||
| Sentinel-2 Gadash 2019 | 0.3 | 4 | 0.0414 | ||||
| VENµS Gadash 2019 | −0.2 | −1 | −0.0058 | ||||
| Sentinel-2 Gadot 2019 | 0.0 | 3 | 0.0047 | ||||
| VENµS Gadot 2019 | 0.0 | 1 | −0.0155 | ||||
| Sentinel-2 Gadot 2020 | 0.1 | 1 | 0.0164 | ||||
| VENµS Gadot 2020 | 0.1 | 0 | −0.0347 | ||||
| All seasons | −0.0063 | 0.0 | −0.0698 * | 1 | 0.0435 | −0.0062 | |
| GNDVI | Sentinel-2 Gadash 2018 | −5 | |||||
| VENµS Gadash 2018 | 3 | ||||||
| Sentinel-2 Gadash 2019 | 1.0 | 6 | 0.0564 | ||||
| VENµS Gadash 2019 | −0.4 | −3 | 0.0225 | ||||
| Sentinel-2 Gadot 2019 | −0.6 | −2 | −0.0431 | ||||
| VENµS Gadot 2019 | 0.4 | 3 | 0.0470 | ||||
| Sentinel-2 Gadot 2020 | 0.4 | 2 | 0.0464 | ||||
| VENµS Gadot 2020 | −0.1 | 0 | −0.0123 | ||||
| All seasons | −0.0695 | 0.1 | −0.0592 | 1 | −0.1035 * | 0.0202 | |
| TNDVI | Sentinel-2 Gadash 2018 | −2 | |||||
| VENµS Gadash 2018 | 2 | ||||||
| Sentinel-2 Gadash 2019 | 0.5 | 3 | 0.0311 | ||||
| VENµS Gadash 2019 | −0.4 | −2 | 0.0147 | ||||
| Sentinel-2 Gadot 2019 | −0.3 | 0 | −0.0260 | ||||
| VENµS Gadot 2019 | 0.3 | 2 | 0.0278 | ||||
| Sentinel-2 Gadot 2020 | 0.2 | 1 | 0.0266 | ||||
| VENµS Gadot 2020 | 0.1 | 0 | −0.0158 | ||||
| All seasons | −0.0498 | 0.1 | −0.0352 | 0 | −0.0546 * | 0.0118 | |
References
- Shtull-Trauring, E.; Cohen, A.; Ben-Hur, M.; Tanny, J.; Bernstein, N. Reducing salinity of treated waste water with large scale desalination. Water Res. 2020, 186, 116322. [Google Scholar] [CrossRef]
- Pimentel, D.; Berger, B.; Filiberto, D.; Newton, M.; Wolfe, B.; Karabinakis, E.; Nandagopal, S. Water resources: Agricultural and environmental issues. Bioscience 2004, 54, 909–918. [Google Scholar] [CrossRef]
- Allen, R.G.; Pereira, L.S.; Dirk, R.; Smith, M. Crop Evapotranspiration-Guidelines for Computing Crop Water Requirements-FAO Irrigation and Drainage Paper 56. FAO Rome 1998, 300, D05109. [Google Scholar]
- Pereira, L.; Paredes, P.; Hunsaker, D.; López-Urrea, R.; Shad, Z.M. Standard single and basal crop coefficients for field crops. Updates and advances to the FAO56 crop water requirements method. Agric. Water Manag. 2021, 243, 106466. [Google Scholar] [CrossRef]
- Beeri, O.; Pelta, R.; Shilo, T.; Mey-Tal, S.; Tanny, J. Accuracy of crop coefficient estimation methods based on satellite imagery. Precis. Agric. 2019, 19, 9. [Google Scholar]
- De Oliveira, T.C.; Ferreira, E.; Dantas, A.A.A. Temporal variation of normalized difference vegetation index (NDVI) and calculation of the crop coefficient (Kc ) from NDVI in areas cultivated with irrigated soybean. Ciência Rural 2016, 46, 1683–1688. [Google Scholar] [CrossRef][Green Version]
- Navarro, A.; Rolim, J.; Miguel, I.; Catalão, J.; Silva, J.; Painho, M.; Vekerdy, Z. Crop Monitoring Based on SPOT-5 Take-5 and Sentinel-1A Data for the Estimation of Crop Water Requirements. Remote Sens. 2016, 8, 525. [Google Scholar] [CrossRef]
- Johnson, L.F.; Trout, T.J. Satellite NDVI Assisted Monitoring of Vegetable Crop Evapotranspiration in California’s San Joaquin Valley. Remote Sens. 2012, 4, 439–455. [Google Scholar] [CrossRef]
- Corbari, C.; Ravazzani, G.; Galvagno, M.; Cremonese, E.; Mancini, M. Assessing Crop Coefficients for Natural Vegetated Areas Using Satellite Data and Eddy Covariance Stations. Sensors 2017, 17, 2664. [Google Scholar] [CrossRef]
- Rozenstein, O.; Haymann, N.; Kaplan, G.; Tanny, J. Estimating cotton water consumption using a time series of Sentinel-2 imagery. Agric. Water Manag. 2018, 207, 44–52. [Google Scholar] [CrossRef]
- Park, J.; Baik, J.; Choi, M. Satellite-based crop coefficient and evapotranspiration using surface soil moisture and vegetation indices in Northeast Asia. Catena 2017, 156, 305–314. [Google Scholar] [CrossRef]
- Li, H.; Luo, Y.; Zhao, C.; Yang, G. Remote sensing of regional crop transpiration of winter wheat based on MODIS data and FAO-56 crop coefficient method. Intell. Autom. Soft Comput. 2013, 19, 285–294. [Google Scholar] [CrossRef]
- Mateos, L.; González-Dugo, M.; Testi, L.; Villalobos, F. Monitoring evapotranspiration of irrigated crops using crop coefficients derived from time series of satellite images. I. Method validation. Agric. Water Manag. 2013, 125, 81–91. [Google Scholar] [CrossRef]
- Rozenstein, O.; Haymann, N.; Kaplan, G.; Tanny, J. Validation of the cotton crop coefficient estimation model based on Sentinel-2 imagery and eddy covariance measurements. Agric. Water Manag. 2019, 223, 105715. [Google Scholar] [CrossRef]
- Martínez, L.J. Relationship between crop nutritional status, spectral measurements and Sentinel 2 images. Agron. Colomb. 2017, 35, 205–215. [Google Scholar] [CrossRef]
- Flood, N. Continuity of Reflectance Data between Landsat-7 ETM+ and Landsat-8 OLI, for Both Top-of-Atmosphere and Surface Reflectance: A Study in the Australian Landscape. Remote Sens. 2014, 6, 7952–7970. [Google Scholar] [CrossRef]
- Sabzchi-Dehkharghani, H.; Nazemi, A.H.; Sadraddini, A.A.; Majnooni-Heris, A.; Biswas, A. Recognition of different yield potentials among rain-fed wheat fields before harvest using remote sensing. Agric. Water Manag. 2021, 245, 106611. [Google Scholar] [CrossRef]
- Research Developments in Saline Agriculture. Research Developments in Saline Agriculture; Springer: Berlin/Heidelberg, Germany, 2019. [Google Scholar] [CrossRef]
- Singh, R.K.; Khand, K.; Kagone, S.; Schauer, M.; Senay, G.B.; Wu, Z. A novel approach for next generation water-use mapping using Landsat and Sentinel-2 satellite data. Hydrol. Sci. J. 2020, 65, 2508–2519. [Google Scholar] [CrossRef]
- Ghosh, S.; Behera, D.; Jayakumar, S.; Das, P. Comparison of Sentinel-2 Multispectral Imager (MSI) and Landsat 8 Operational Land Imager (OLI) for Vegetation Monitoring. In Spatial Modeling in Forest Resources Management; Springer: Berlin/Heidelberg, Germany, 2020; pp. 175–192. [Google Scholar]
- Mourad, R.; Jaafar, H.; Anderson, M.; Gao, F. Assessment of Leaf Area Index Models Using Harmonized Landsat and Sentinel-2 Surface Reflectance Data over a Semi-Arid Irrigated Landscape. Remote Sens. 2020, 12, 3121. [Google Scholar] [CrossRef]
- Padró, J.-C.; Pons, X.; Aragonés, D.; Díaz-Delgado, R.; García, D.; Bustamante, J.; Pesquer, L.; Domingo-Marimon, C.; González-Guerrero, Ò.; Cristóbal, J.; et al. Radiometric Correction of Simultaneously Acquired Landsat-7/Landsat-8 and Sentinel-2A Imagery Using Pseudoinvariant Areas (PIA): Contributing to the Landsat Time Series Legacy. Remote Sens. 2017, 9, 1319. [Google Scholar] [CrossRef]
- Manivasagam, V.; Kaplan, G.; Rozenstein, O. Developing Transformation Functions for VENμS and Sentinel-2 Surface Reflectance over Israel. Remote Sens. 2019, 11, 1710. [Google Scholar] [CrossRef]
- Harel, D.; Sofer, M.; Broner, M.; Zohar, D.; Gantz, S. Growth-Stage-Specific Kc of Greenhouse Tomato Plants Grown in Semi-Arid Mediterranean Region. J. Agric. Sci. 2014, 6, 132–142. [Google Scholar] [CrossRef]
- Čerekovic, N.; Todorovic, M.; Snyder, R.L.; Boari, F.; Pace, B.; Cantore, V. Evaluation of the crop coefficients for tomato crop grown in a Mediterranean climate. Options Méditerranéennes Séries A Mediterr. Semin. 2010, 94, 91–94. [Google Scholar]
- Rosa, R.; Dicken, U.; Tanny, J. Estimating evapotranspiration from processing tomato using the surface renewal technique. Biosyst. Eng. 2013, 114, 406–413. [Google Scholar] [CrossRef]
- Hanson, B.R.; May, D.M. Crop evapotranspiration of processing tomato in the San Joaquin Valley of California, USA. Irrig. Sci. 2005, 24, 211–221. [Google Scholar] [CrossRef]
- Vanino, S.; Nino, P.; De Michele, C.; Bolognesi, S.F.; D’Urso, G.; Di Bene, C.; Pennelli, B.; Vuolo, F.; Farina, R.; Pulighe, G.; et al. Capability of Sentinel-2 data for estimating maximum evapotranspiration and irrigation requirements for tomato crop in Central Italy. Remote Sens. Environ. 2018, 215, 452–470. [Google Scholar] [CrossRef]
- Williams, J.R. The EPIC Model, Computer Models of Watershed Hydrology; Water Resources Publications: Highlands Ranch, CO, USA, 1995; pp. 909–1000. ISBN 0918334918. [Google Scholar]
- Duchemin, B.; Hadria, R.; Er-Raki, S.; Boulet, G.; Maisongrande, P.; Chehbouni, A.; Escadafal, R.; Ezzahar, J.; Hoedjes, J.C.B.; Kharrou, M.H.; et al. Monitoring wheat phenology and irrigation in Central Morocco: On the use of relationships between evapotranspiration, crops coefficients, leaf area index and remotely-sensed vegetation indices. Agric. Water Manag. 2006, 79, 1–27. [Google Scholar] [CrossRef]
- Sadeh, Y.; Zhu, X.; Dunkerley, D.; Walker, J.P.; Zhang, Y.; Rozenstein, O.; Manivasagam, V.; Chenu, K. Fusion of Sentinel-2 and PlanetScope time-series data into daily 3 m surface reflectance and wheat LAI monitoring. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 102260. [Google Scholar] [CrossRef]
- Farg, E.; Abutaleb, K.A.; Arafat, S.M.; El Sharkawy, M.M.; Nabil, M. Assessment of Sentinel-2 data capabilities for vegetation physiological parameters retrieving in the Nile Delta. Biosci. Res. 2020, 17, 467–478. [Google Scholar]
- Papadavid, G.; Hadjimitsis, D.; Toulios, L.; Michaelides, S. Mapping potato crop height and leaf area index through vegetation indices using remote sensing in Cyprus. J. Appl. Remote Sens. 2011, 5, 053526. [Google Scholar] [CrossRef]
- Thenkabail, P.S.; Ward, A.D.; Lyon, J.G. Landsat-5 Thematic Mapper models of soybean and corn crop characteristics. Int. J. Remote Sens. 1994, 15, 49–61. [Google Scholar] [CrossRef]
- Kamble, B.; Kilic, A.; Hubbard, K.G. Estimating Crop Coefficients Using Remote Sensing-Based Vegetation Index. Remote Sens. 2013, 5, 1588–1602. [Google Scholar] [CrossRef]
- Jackson, R.D.; Idso, S.B.; Reginato, R.J.; Pinter, P.J. Remotely Sensed Crop Temperatures and Reflectances as Inputs to Irrigation Scheduling; American Association of Agricultural Engineers: New York, NY, USA, 1980; pp. 390–397. [Google Scholar]
- Ewert, F. Modelling Plant Responses to Elevated CO2: How Important is Leaf Area Index? Ann. Bot. 2004, 93, 619–627. [Google Scholar] [CrossRef] [PubMed]
- Herrmann, I.; Pimstein, A.; Karnieli, A.; Cohen, Y.; Alchanatis, V.; Bonfil, D. LAI assessment of wheat and potato crops by VENμS and Sentinel-2 bands. Remote Sens. Environ. 2011, 115, 2141–2151. [Google Scholar] [CrossRef]
- Nguy-Robertson, A.L.; Peng, Y.; Gitelson, A.A.; Arkebauer, T.J.; Pimstein, A.; Herrmann, I.; Karnieli, A.; Rundquist, D.C.; Bonfil, D.J. Estimating green LAI in four crops: Potential of determining optimal spectral bands for a universal algorithm. Agric. For. Meteorol. 2014, 192–193, 140–148. [Google Scholar] [CrossRef]
- Heuvelink, E.; Bakker, M.; Elings, A.; Kaarsemaker, R.; Marcelis, L. Effect of leaf area on tomato yield. Acta Hortic. 2005, 691, 43–50. [Google Scholar] [CrossRef]
- Sun, Y.; Qin, Q.; Ren, H.; Zhang, T.; Chen, S. Red-Edge Band Vegetation Indices for Leaf Area Index Estimation From Sentinel-2/MSI Imagery. IEEE Trans. Geosci. Remote Sens. 2020, 58, 826–840. [Google Scholar] [CrossRef]
- Weiss, M.; Baret, F. S2ToolBox Level 2 Products: LAI, FAPAR, FCOVER. Available online: http://step.esa.int/docs/extra/ATBD_S2ToolBox_L2B_V1.1.pdf (accessed on 21 February 2021).
- Beeri, O.; Netzer, Y.; Munitz, S.; Mintz, D.F.; Pelta, R.; Shilo, T.; Horesh, A.; Mey-Tal, S. Kc and LAI Estimations Using Optical and SAR Remote Sensing Imagery for Vineyards Plots. Remote Sens. 2020, 12, 3478. [Google Scholar] [CrossRef]
- Revill, A.; Florence, A.; MacArthur, A.; Hoad, S.; Rees, R.; Williams, M. Quantifying Uncertainty and Bridging the Scaling Gap in the Retrieval of Leaf Area Index by Coupling Sentinel-2 and UAV Observations. Remote Sens. 2020, 12, 1843. [Google Scholar] [CrossRef]
- Richardson, A.J.; Wiegand, C.L. Distinguishing vegetation from soil background information. Photogramm. Eng. Remote Sens. 1977, 43, 1541–1552. [Google Scholar]
- Dedieu, G.; Karnieli, A.; Hagolle, O.; Jeanjean, H.; Cabot, F.; Ferrier, P.; Yaniv, Y. A Joint Israeli—French Earth Observation Scientific Mission with High Spatial and Temporal Resolution Capabilities. In Proceedings of the 4th ESA CHRIS/Proba Work, Frascati, Italy, 19–21 September 2006; pp. 19–21. [Google Scholar]
- Steiger, J.H. Tests for comparing elements of a correlation matrix. Psychol. Bull. 1980, 87, 245–251. [Google Scholar] [CrossRef]
- Fisher, R.A. On the Probable Error of a Coefficient of Correlation Deduced from a Small Sample. Metron 1921, 1, 1–32. [Google Scholar]
- Čereković, N.; Todorović, M.; Snyder, R.L. The Relationship Between Leaf Area Index and Crop Coefficient for Tomato Crop Grown in Southern Italy. Euroinvent 2010, 1, 3–10. [Google Scholar]
- Johnstone, P.; Hartz, T.; LeStrange, M.; Nunez, J.; Miyao, E. Managing Fruit Soluble Solids with Late-season Deficit Irrigation in Drip-irrigated Processing Tomato Production. HortScience 2005, 40, 1857–1861. [Google Scholar] [CrossRef]
- Aksic, M.; Gudzic, S.; Deletic, N.; Gudzic, N.; Stojkovic, S. Tomato fruit yield and evapotranspiration in the conditions of South Serbia. Bulg. J. Agric. Sci. 2011, 17, 150–157. [Google Scholar]
- Huang, W.; Luo, J.; Zhang, J.; Zhao, J.; Zhao, C.; Wang, J.; Yang, G.; Huang, M.; Huang, L.; Du, L.H.A.S. Crop Disease and Pest Monitoring by Remote Sensing. Remote Sens. Appl. 2012, 37–76. [Google Scholar] [CrossRef]
- Gogoi, N.; Deka, B.; Bora, L. Remote sensing and its use in detection and monitoring plant diseases: A review. Agric. Rev. 2018, 39, 307–313. [Google Scholar] [CrossRef]
- Choubey, V.K. Detection and delineation of waterlogging by remote sensing techniques. J. Indian Soc. Remote Sens. 1997, 25, 123–135. [Google Scholar] [CrossRef]
- Hassan, M.S.; Mahmud-ul-islam, S. Detection of Water—Logging Areas Based on Passive Remote Sensing Data in Jessore District of Khulna Division, Bangladesh. Int. J. Sci. Res. Publ. 2014, 4, 1–7. [Google Scholar]
- Ennouri, K.; Kallel, A. Remote Sensing: An Advanced Technique for Crop Condition Assessment. Math. Probl. Eng. 2019, 2019, 1–8. [Google Scholar] [CrossRef]
- Lanfri, S. Vegetation analysis using remote sensing. Argent. Spat. Agency Cordoba Natl. Univ. Veg. 2010, 1–58. [Google Scholar]
- Fan, L.; Gao, Y.; Brück, H.; Bernhofer, C. Investigating the relationship between NDVI and LAI in semi-arid grassland in Inner Mongolia using in-situ measurements. Theor. Appl. Clim. 2008, 95, 151–156. [Google Scholar] [CrossRef]
- Pasqualotto, N.; Delegido, J.; Van Wittenberghe, S.; Rinaldi, M.; Moreno, J. Multi-Crop Green LAI Estimation with a New Simple Sentinel-2 LAI Index (SeLI). Sensors 2019, 19, 904. [Google Scholar] [CrossRef]
- Xavier, A.C.; Vettorazzi, C.A. Mapping leaf area index through spectral vegetation indices in a subtropical watershed. Int. J. Remote Sens. 2004, 25, 1661–1672. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- Pinty, B.; Verstraete, M.M. GEMI: A non-linear index to monitor global vegetation from satellites. Vegetatio 1992, 101, 15–20. [Google Scholar] [CrossRef]
- Clevers, J. Application of a weighted infrared-red vegetation index for estimating leaf Area Index by Correcting for Soil Moisture. Remote Sens. Environ. 1989, 29, 25–37. [Google Scholar] [CrossRef]
- Gitelson, A.A.; Merzlyak, M.N. Remote sensing of chlorophyll concentration in higher plant leaves. Adv. Space Res. 1998, 22, 689–692. [Google Scholar] [CrossRef]
- Qi, J.; Chehbouni, A.; Huete, A.R.; Kerr, Y.H.; Sorooshian, S. A modified soil adjusted vegetation index. Remote Sens. Environ. 1994, 48, 119–126. [Google Scholar] [CrossRef]
- Dash, J.; Curran, P. Evaluation of the MERIS terrestrial chlorophyll index (MTCI). Adv. Space Res. 2007, 39, 100–104. [Google Scholar] [CrossRef]
- Crippen, R. Calculating the vegetation index faster. Remote Sens. Environ. 1990, 34, 71–73. [Google Scholar] [CrossRef]
- Frampton, W.J.; Dash, J.; Watmough, G.; Milton, E.J. Evaluating the capabilities of Sentinel-2 for quantitative estimation of biophysical variables in vegetation. ISPRS J. Photogramm. Remote Sens. 2013, 82, 83–92. [Google Scholar] [CrossRef]
- Bosanquet, B. VII.—CRITICAL NOTICES. Mind 1898, VII, 101–108. [Google Scholar] [CrossRef]
- Huete, A. A soil-adjusted vegetation index (SAVI). Remote Sens. Environ. 1988, 25, 295–309. [Google Scholar] [CrossRef]
- Deering, D.W.; Rouse, J.W.; Haas, R.H.; Schell, J.A. Measuring "Forage Production" of Grazing Units From Landsat Mss Data; ERIM: Ann Arbor, MI, USA, 1975; Volume 2, pp. 1169–1178. [Google Scholar]




| Site | Period * | # Crop Height Measurements | # LAI Measurements | Polygon Size (# Sentinel-2 Pixels) | ET0 Data Source | Distance and Bearing To The Meteorological Station |
|---|---|---|---|---|---|---|
| Gadash | 9-May-18 30-Jul-18 | 8 | - | - | - | - |
| Gadash | 3-May-19 24-Jul-19 | 7 | 6 | 425 | Gadash | 250 m SE |
| Gadot | 25-Apr-19 14-Aug-19 | 11 | 11 | 249 | Gadot | 1.5 km SW |
| Gadot | 7-May-20 3-Aug-20 | 9 | 6 | 332 | Kavul | 7 km NNW |
| Band | Sentinel-2A | Sentinel-2B | VENµS | |||
|---|---|---|---|---|---|---|
| Central Wavelength (nm) | Bandwidth (nm) | Central Wavelength (nm) | Bandwidth (nm) | Central Wavelength (nm) | Bandwidth (nm) | |
| Blue | 492.4 | 66 | 492.1 | 66 | 491.9 | 40 |
| Green | 559.8 | 36 | 559.0 | 36 | 555 | 40 |
| Red | 664.6 | 31 | 664.9 | 31 | 666.2 | 30 |
| Red Edge | 704.1 | 15 | 703.8 | 16 | 702 | 24 |
| 740.5 | 15 | 739.1 | 15 | 741.1 | 16 | |
| 782.8 | 20 | 779.7 | 20 | 782.2 | 16 | |
| NIR | 832.8 | 106 | 832.9 | 106 | ||
| 864.7 | 21 | 864.0 | 22 | 861.1 | 40 | |
| Site | Satellite | Tomato Kc Models | Tomato LAI Models | Tomato Height Models | |||
|---|---|---|---|---|---|---|---|
| Period * | Number of Images | Period * | Number of Images | Period * | Number of Images | ||
| Gadash 2018 | Sentinel-2 | - | - | - | - | 16 May 2018 15 Jul 2018 | 11 |
| Gadash 2018 | VENµS | - | - | - | - | 15 Jun 2018 08 Aug 2018 | 17 |
| Gadash 2019 | Sentinel-2 | 16 May 2019 20 Jul 2019 | 8−9 ** | 21 May 2019 25 Jul 2019 | 8−9 ** | 16 May 2019 25 Jul 2019 | 9−10 ** |
| Gadash 2019 | VENµS | 11 May 2019 24 Jul 2019 | 28 | 17 May 2019 24 Jul 2019 | 25 | 03 May 2019 24 Jul 2019 | 30 |
| Gadot 2019 | Sentinel-2 | 01 May 2019 14 Aug 2019 | 13−14 ** | 21 May 2019 14 Aug 2019 | 12−13 ** | 21 May 2019 14 Aug 2019 | 12−13 ** |
| Gadot 2019 | VENµS | 01 May 2019 13 Aug 2019 | 39 | 17 May 2019 13 Aug 2019 | 34 | 17 May 2019 13 Aug 2019 | 34 |
| Gadot 2020 | Sentinel-2 | 20 May 2020 03 Aug 2020 | 14 | 20 May 2020 19 Jul 2020 | 11 | 20 May 2020 03 Aug 2020 | 14 |
| Gadot 2020 | VENµS | 11 May 2020 03 Aug 2020 | 29 | 21 May 2020 20 Jul 2020 | 22 | 13 May 2020 03 Aug 2020 | 28 |
| Bands (Central Wavelength) | Slope | Intercept | |
|---|---|---|---|
| 10 m | Blue (490 nm) | 1.0307 | 0.0194 |
| Green (560 nm) | 1.0035 | 0.0271 | |
| Red (665 nm) | 0.9588 | 0.0287 | |
| NIR (842 nm) | 0.8082 | 0.0768 | |
| 20 m | Red edge 1 (705 nm) | 0.9589 | 0.0481 |
| Red edge 2 (740 nm) | 0.8632 | 0.0648 | |
| Red edge 3 (783 nm) | 0.8347 | 0.0796 | |
| NIR (865 nm) | 0.7841 | 0.0980 |
| Vegetation Index | Dataset | LAI | Height | Kc | |||
|---|---|---|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE (cm) | R2 | RMSE | ||
| GEMI | Sentinel-2 Gadash 2018 | 9 | |||||
| Sentinel-2 Gadash 2019 | 1.3 | 11 | 0.0727 | ||||
| Sentinel-2 Gadot 2019 | 1.2 | 6 | 0.1102 | ||||
| Sentinel-2 Gadot 2020 | 1.3 | 9 | 0.0576 | ||||
| All seasons | 0.7444 | 1.3 | 0.651 | 9 | 0.7424 | 0.0855 | |
| DVI | Sentinel-2 Gadash 2018 | 8 | |||||
| Sentinel-2 Gadash 2019 | 1.1 | 9 | 0.0705 | ||||
| Sentinel-2 Gadot 2019 | 1.4 | 4 | 0.1122 | ||||
| Sentinel-2 Gadot 2020 | 0.9 | 6 | 0.0635 | ||||
| All seasons | 0.7677 | 1.2 | 0.7727 | 7 | 0.7244 | 0.0872 | |
| WDVI | Sentinel-2 Gadash 2018 | 5 | |||||
| Sentinel-2 Gadash 2019 | 1.1 | 8 | 0.0739 | ||||
| Sentinel-2 Gadot 2019 | 1.4 | 5 | 0.1135 | ||||
| Sentinel-2 Gadot 2020 | 0.9 | 6 | 0.0632 | ||||
| All seasons | 0.7636 | 1.2 | 0.8237 | 6 | 0.7165 | 0.0884 | |
| SAVI | Sentinel-2 Gadash 2018 | 9 | |||||
| Sentinel-2 Gadash 2019 | 1.2 | 10 | 0.0720 | ||||
| Sentinel-2 Gadot 2019 | 1.5 | 5 | 0.1016 | ||||
| Sentinel-2 Gadot 2020 | 1.0 | 8 | 0.0583 | ||||
| All seasons | 0.7322 | 1.3 | 0.7168 | 8 | 0.7627 | 0.0809 | |
| MSAVI | Sentinel-2 Gadash 2018 | 8 | |||||
| Sentinel-2 Gadash 2019 | 1.2 | 10 | 0.0705 | ||||
| Sentinel-2 Gadot 2019 | 1.4 | 4 | 0.1070 | ||||
| Sentinel-2 Gadot 2020 | 1.0 | 7 | 0.0601 | ||||
| All seasons | 0.7456 | 1.2 | 0.7382 | 8 | 0.746 | 0.0837 | |
| Biophysical | Sentinel-2 Gadash 2019 | 1.5 | |||||
| Processor | Sentinel-2 Gadot 2019 | 2.9 | |||||
| Sentinel-2 Gadot 2020 | 2.1 | ||||||
| All seasons | 0.5299 | 2.3 | |||||
| Vegetation Index | Dataset | LAI | Height | Kc | |||
|---|---|---|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE (cm) | R2 | RMSE | ||
| GEMI | Sentinel-2 Gadash 2018 | 9 | |||||
| VENµS Gadash 2018 | 9 | ||||||
| Sentinel-2 Gadash 2019 | 1.2 | 11 | 0.0638 | ||||
| VENµS Gadash 2019 | 1.1 | 10 | 0.0732 | ||||
| Sentinel-2 Gadot 2019 | 1.3 | 6 | 0.1094 | ||||
| VENµS Gadot 2019 | 1.4 | 6 | 0.1031 | ||||
| Sentinel-2 Gadot 2020 | 1.3 | 9 | 0.0734 | ||||
| VENµS Gadot 2020 | 1.1 | 6 | 0.0801 | ||||
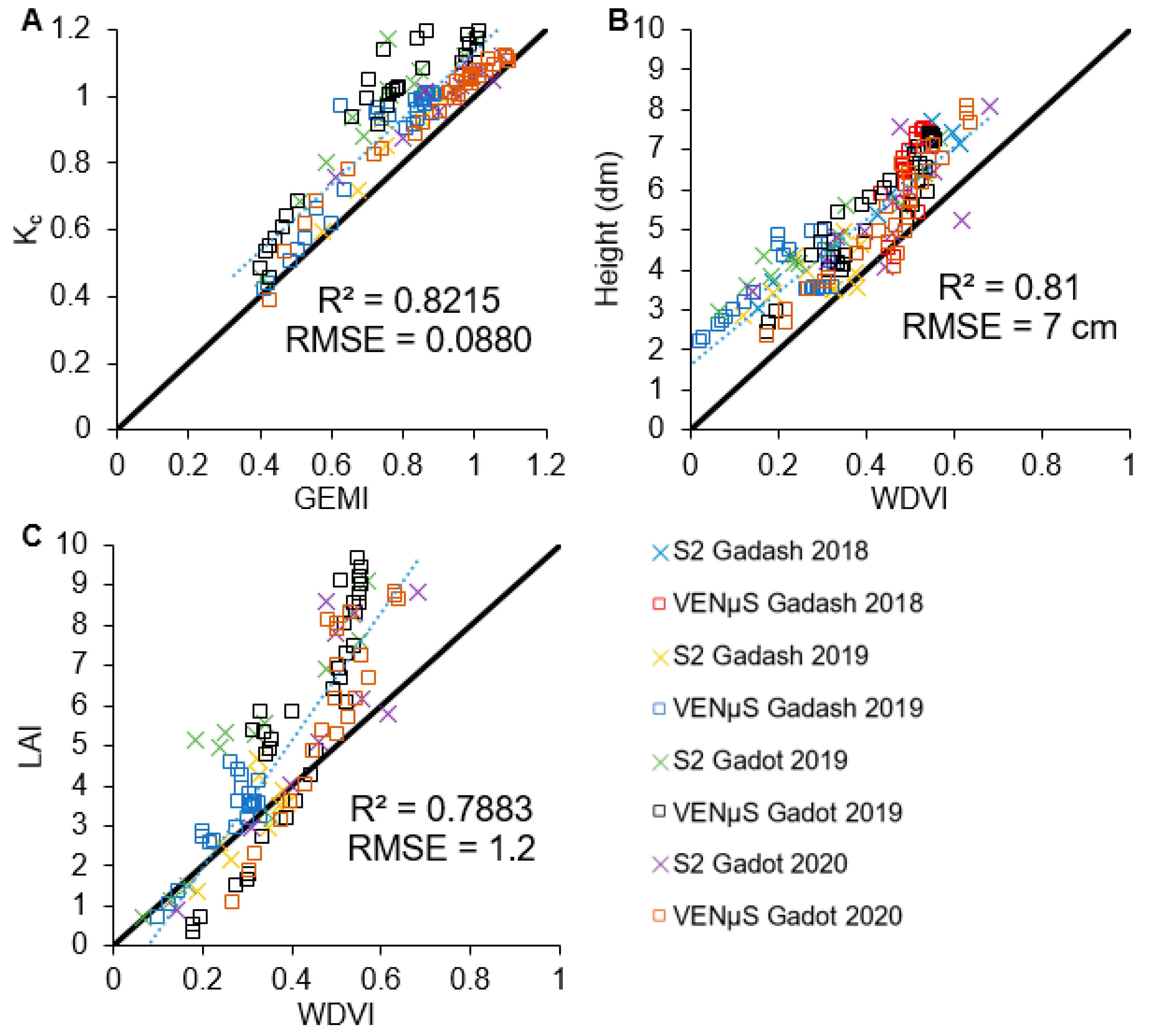
| All seasons | 0.7544 | 1.2 | 0.7033 | 8 | 0.8215 | 0.0880 | |
| DVI | Sentinel-2 Gadash 2018 | 9 | |||||
| VENµS Gadash 2018 | 8 | ||||||
| Sentinel-2 Gadash 2019 | 1.0 | 9 | 0.0568 | ||||
| VENµS Gadash 2019 | 0.9 | 9 | 0.0795 | ||||
| Sentinel-2 Gadot 2019 | 1.5 | 4 | 0.1155 | ||||
| VENµS Gadot 2019 | 1.3 | 6 | 0.1161 | ||||
| Sentinel-2 Gadot 2020 | 1.4 | 9 | 0.0864 | ||||
| VENµS Gadot 2020 | 1.0 | 6 | 0.0963 | ||||
| All seasons | 0.776 | 1.2 | 0.7681 | 7 | 0.7756 | 0.0984 | |
| WDVI | Sentinel-2 Gadash 2018 | 8 | |||||
| VENµS Gadash 2018 | 8 | ||||||
| Sentinel-2 Gadash 2019 | 0.7 | 7 | 0.0718 | ||||
| VENµS Gadash 2019 | 1.2 | 10 | 0.0887 | ||||
| Sentinel-2 Gadot 2019 | 2.1 | 9 | 0.1622 | ||||
| VENµS Gadot 2019 | 1.2 | 5 | 0.1087 | ||||
| Sentinel-2 Gadot 2020 | 0.9 | 6 | 0.0674 | ||||
| VENµS Gadot 2020 | 1.1 | 6 | 0.1039 | ||||
| All seasons | 0.7418 | 1.3 | 0.7627 | 7 | 0.7431 | 0.1052 | |
| SAVI | Sentinel-2 Gadash 2018 | 9 | |||||
| VENµS Gadash 2018 | 8 | ||||||
| Sentinel-2 Gadash 2019 | 1.2 | 10 | 0.0627 | ||||
| VENµS Gadash 2019 | 1.0 | 9 | 0.0678 | ||||
| Sentinel-2 Gadot 2019 | 1.5 | 5 | 0.1019 | ||||
| VENµS Gadot 2019 | 1.4 | 7 | 0.1089 | ||||
| Sentinel-2 Gadot 2020 | 1.0 | 8 | 0.0718 | ||||
| VENµS Gadot 2020 | 1.1 | 7 | 0.0886 | ||||
| All seasons | 0.7637 | 1.2 | 0.7437 | 8 | 0.8138 | 0.0896 | |
| MSAVI | Sentinel-2 Gadash 2018 | 9 | |||||
| VENµS Gadash 2018 | 8 | ||||||
| Sentinel-2 Gadash 2019 | 1.1 | 9 | 0.0590 | ||||
| VENµS Gadash 2019 | 0.9 | 9 | 0.0737 | ||||
| Sentinel-2 Gadot 2019 | 1.5 | 5 | 0.1087 | ||||
| VENµS Gadot 2019 | 1.4 | 6 | 0.1136 | ||||
| Sentinel-2 Gadot 2020 | 1.0 | 7 | 0.0737 | ||||
| VENµS Gadot 2020 | 1.1 | 6 | 0.0948 | ||||
| All seasons | 0.7739 | 1.2 | 0.7612 | 8 | 0.7932 | 0.0944 | |
| Vegetation Index | Dataset | LAI | Height | Kc | |||
|---|---|---|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE (cm) | R2 | RMSE | ||
| GEMI | Sentinel-2 Gadash 2018 | 7 | |||||
| VENµS Gadash 2018 | 9 | ||||||
| Sentinel-2 Gadash 2019 | 1.6 | 13 | 0.0798 | ||||
| VENµS Gadash 2019 | 0.9 | 9 | 0.0714 | ||||
| Sentinel-2 Gadot 2019 | 1.0 | 6 | 0.0944 | ||||
| VENµS Gadot 2019 | 1.5 | 7 | 0.1183 | ||||
| Sentinel-2 Gadot 2020 | 1.5 | 10 | 0.1120 | ||||
| VENµS Gadot 2020 | 1.0 | 7 | 0.0713 | ||||
| All seasons | 0.7502 | 1.3 | 0.7101 | 8 | 0.7956 | 0.0942 | |
| DVI | Sentinel-2 Gadash 2018 | 7 | |||||
| VENµS Gadash 2018 | 9 | ||||||
| Sentinel-2 Gadash 2019 | 1.3 | 10 | 0.0609 | ||||
| VENµS Gadash 2019 | 0.8 | 8 | 0.0868 | ||||
| Sentinel-2 Gadot 2019 | 1.3 | 4 | 0.0996 | ||||
| VENµS Gadot 2019 | 1.4 | 7 | 0.1266 | ||||
| Sentinel-2 Gadot 2020 | 1.3 | 8 | 0.1225 | ||||
| VENµS Gadot 2020 | 1.0 | 6 | 0.0832 | ||||
| All seasons | 0.7731 | 1.2 | 0.7725 | 7 | 0.755 | 0.1028 | |
| WDVI | Sentinel-2 Gadash 2018 | 5 | |||||
| VENµS Gadash 2018 | 8 | ||||||
| Sentinel-2 Gadash 2019 | 0.9 | 8 | 0.0531 | ||||
| VENµS Gadash 2019 | 0.6 | 7 | 0.1038 | ||||
| Sentinel-2 Gadot 2019 | 1.6 | 6 | 0.1286 | ||||
| VENµS Gadot 2019 | 1.3 | 5 | 0.1167 | ||||
| Sentinel-2 Gadot 2020 | 0.9 | 4 | 0.0901 | ||||
| VENµS Gadot 2020 | 1.2 | 8 | 0.1161 | ||||
| All seasons | 0.7883 | 1.2 | 0.81 | 7 | 0.7214 | 0.1096 | |
| SAVI | Sentinel-2 Gadash 2018 | 7 | |||||
| VENµS Gadash 2018 | 10 | ||||||
| Sentinel-2 Gadash 2019 | 1.7 | 12 | 0.0843 | ||||
| VENµS Gadash 2019 | 0.8 | 8 | 0.0791 | ||||
| Sentinel-2 Gadot 2019 | 1.2 | 4 | 0.0774 | ||||
| VENµS Gadot 2019 | 1.6 | 8 | 0.1255 | ||||
| Sentinel-2 Gadot 2020 | 1.4 | 9 | 0.1195 | ||||
| VENµS Gadot 2020 | 1.0 | 6 | 0.0742 | ||||
| All seasons | 0.7383 | 1.2831 | 0.7317 | 8 | 0.7765 | 0.0982 | |
| MSAVI | Sentinel-2 Gadash 2018 | 6 | |||||
| VENµS Gadash 2018 | 9 | ||||||
| Sentinel-2 Gadash 2019 | 1.6 | 12 | 0.0755 | ||||
| VENµS Gadash 2019 | 0.8 | 8 | 0.0846 | ||||
| Sentinel-2 Gadot 2019 | 1.3 | 4 | 0.0865 | ||||
| VENµS Gadot 2019 | 1.6 | 7 | 0.1290 | ||||
| Sentinel-2 Gadot 2020 | 1.4 | 9 | 0.1238 | ||||
| VENµS Gadot 2020 | 1.0 | 6 | 0.0787 | ||||
| All seasons | 0.7484 | 1.3 | 0.7456 | 8 | 0.7585 | 0.1020 | |
| Vegetation Index | Dataset | LAI | Height | Kc | |||
|---|---|---|---|---|---|---|---|
| R2 | RMSE | R2 | RMSE (cm) | R2 | RMSE | ||
| GEMI | Sentinel-2 Gadash 2018 | −2 | |||||
| VENµS Gadash 2018 | 1 | ||||||
| Sentinel-2 Gadash 2019 | 0.4 | 2 | 0.0159 | ||||
| VENµS Gadash 2019 | −0.2 | −2 | −0.0018 | ||||
| Sentinel-2 Gadot 2019 | −0.3 | 0 | −0.0151 | ||||
| VENµS Gadot 2019 | 0.1 | 1 | 0.0152 | ||||
| Sentinel-2 Gadot 2020 | 0.2 | 1 | 0.0386 | ||||
| VENµS Gadot 2020 | −0.1 | 0 | −0.0088 | ||||
| All seasons | −0.0042 | 0.0 | 0.0068 | 0 | −0.0259 * | 0.0062 | |
| DVI | Sentinel-2 Gadash 2018 | −2 | |||||
| VENµS Gadash 2018 | 1 | ||||||
| Sentinel-2 Gadash 2019 | 0.3 | 2 | 0.0041 | ||||
| VENµS Gadash 2019 | −0.1 | −1 | 0.0073 | ||||
| Sentinel-2 Gadot 2019 | −0.2 | 0 | −0.0158 | ||||
| VENµS Gadot 2019 | 0.1 | 1 | 0.0105 | ||||
| Sentinel-2 Gadot 2020 | −0.2 | −1 | 0.0360 | ||||
| VENµS Gadot 2020 | 0.0 | 0 | −0.0131 | ||||
| All seasons | −0.0029 | 0.0 | 0.0044 | 0 | −0.0206 | 0.0044 | |
| WDVI | Sentinel-2 Gadash 2018 | −3 | |||||
| VENµS Gadash 2018 | 0 | ||||||
| Sentinel-2 Gadash 2019 | 0.2 | 2 | −0.0187 | ||||
| VENµS Gadash 2019 | −0.6 | −3 | 0.0151 | ||||
| Sentinel-2 Gadot 2019 | −0.5 | −3 | −0.0336 | ||||
| VENµS Gadot 2019 | 0.1 | 0 | 0.0080 | ||||
| Sentinel-2 Gadot 2020 | 0.0 | −2 | 0.0227 | ||||
| VENµS Gadot 2020 | 0.1 | 1 | 0.0122 | ||||
| All seasons | 0.0465 | −0.1 | 0.0473* | −1 | −0.0217 | 0.0044 | |
| SAVI | Sentinel-2 Gadash 2018 | −3 | |||||
| VENµS Gadash 2018 | 1 | ||||||
| Sentinel-2 Gadash 2019 | 0.5 | 3 | 0.0216 | ||||
| VENµS Gadash 2019 | −0.2 | −1 | 0.0113 | ||||
| Sentinel-2 Gadot 2019 | −0.3 | 0 | −0.0244 | ||||
| VENµS Gadot 2019 | 0.2 | 1 | 0.0166 | ||||
| Sentinel-2 Gadot 2020 | 0.4 | 2 | 0.0477 | ||||
| VENµS Gadot 2020 | −0.1 | −1 | −0.0144 | ||||
| All seasons | −0.0254 | 0.1 | −0.012 | 0 | −0.0373 * | 0.0086 | |
| MSAVI | Sentinel-2 Gadash 2018 | −3 | |||||
| VENµS Gadash 2018 | 1 | ||||||
| Sentinel-2 Gadash 2019 | 0.5 | 3 | 0.0165 | ||||
| VENµS Gadash 2019 | −0.2 | −1 | 0.0109 | ||||
| Sentinel-2 Gadot 2019 | −0.3 | 0 | −0.0222 | ||||
| VENµS Gadot 2019 | 0.2 | 1 | 0.0154 | ||||
| Sentinel-2 Gadot 2020 | 0.4 | 2 | 0.0501 | ||||
| VENµS Gadot 2020 | −0.1 | −1 | −0.0160 | ||||
| All seasons | −0.0255 | 0.1 | −0.0156 | 0 | −0.0347 * | 0.0076 | |
| Kc Prediction by Height | Kc Prediction by LAI | |
|---|---|---|
| Measurements | 24 | 21 |
| R2 | 0.7467 | 0.6629 |
| RMSE | 0.0948 | 0.1024 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kaplan, G.; Fine, L.; Lukyanov, V.; Manivasagam, V.S.; Malachy, N.; Tanny, J.; Rozenstein, O. Estimating Processing Tomato Water Consumption, Leaf Area Index, and Height Using Sentinel-2 and VENµS Imagery. Remote Sens. 2021, 13, 1046. https://doi.org/10.3390/rs13061046
Kaplan G, Fine L, Lukyanov V, Manivasagam VS, Malachy N, Tanny J, Rozenstein O. Estimating Processing Tomato Water Consumption, Leaf Area Index, and Height Using Sentinel-2 and VENµS Imagery. Remote Sensing. 2021; 13(6):1046. https://doi.org/10.3390/rs13061046
Chicago/Turabian StyleKaplan, Gregoriy, Lior Fine, Victor Lukyanov, V. S. Manivasagam, Nitzan Malachy, Josef Tanny, and Offer Rozenstein. 2021. "Estimating Processing Tomato Water Consumption, Leaf Area Index, and Height Using Sentinel-2 and VENµS Imagery" Remote Sensing 13, no. 6: 1046. https://doi.org/10.3390/rs13061046
APA StyleKaplan, G., Fine, L., Lukyanov, V., Manivasagam, V. S., Malachy, N., Tanny, J., & Rozenstein, O. (2021). Estimating Processing Tomato Water Consumption, Leaf Area Index, and Height Using Sentinel-2 and VENµS Imagery. Remote Sensing, 13(6), 1046. https://doi.org/10.3390/rs13061046