
Using Time Series Sentinel-1 Images for Object-Oriented Crop Classification in Google Earth Engine

 ,
, 
Abstract

1. Introduction
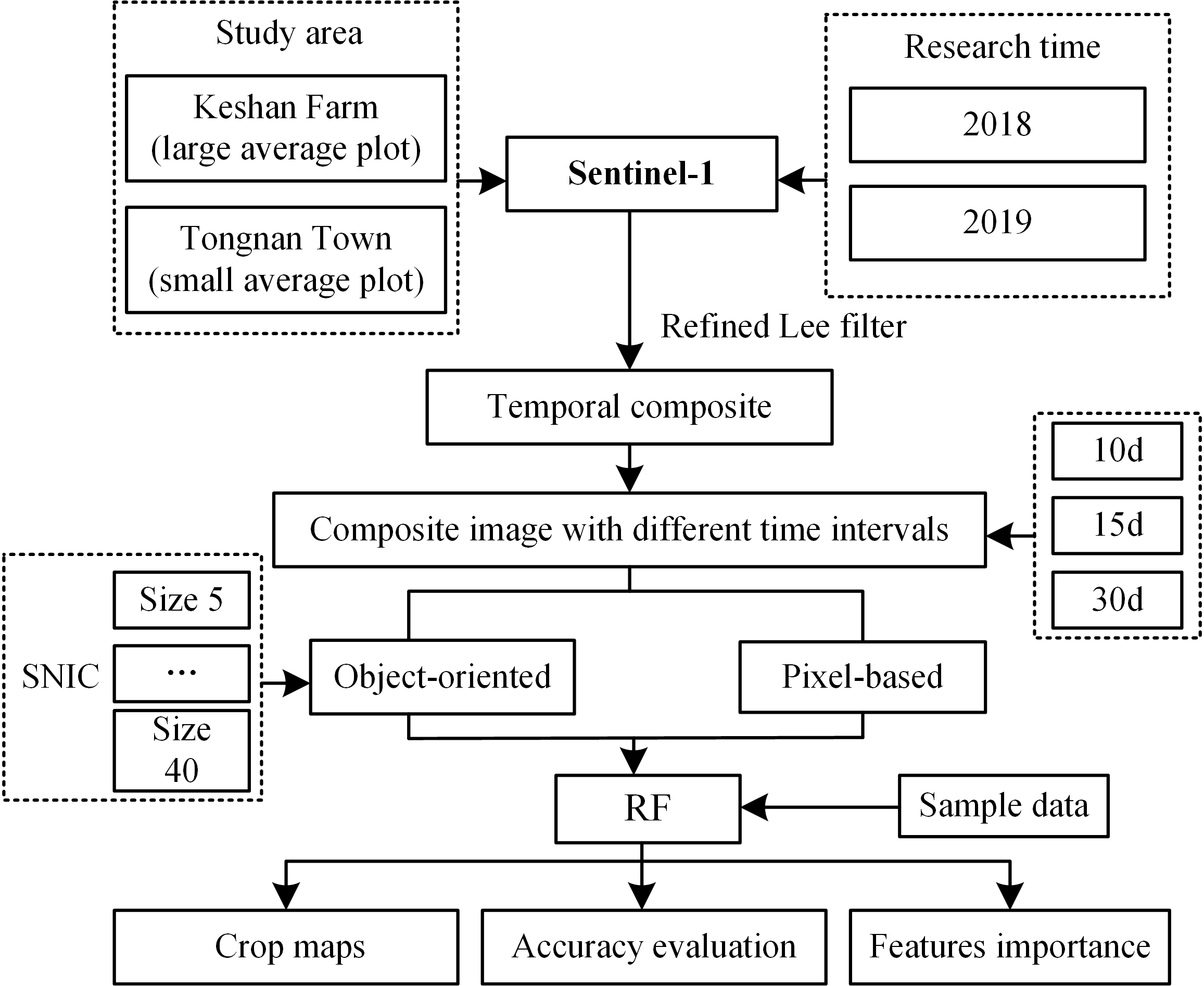
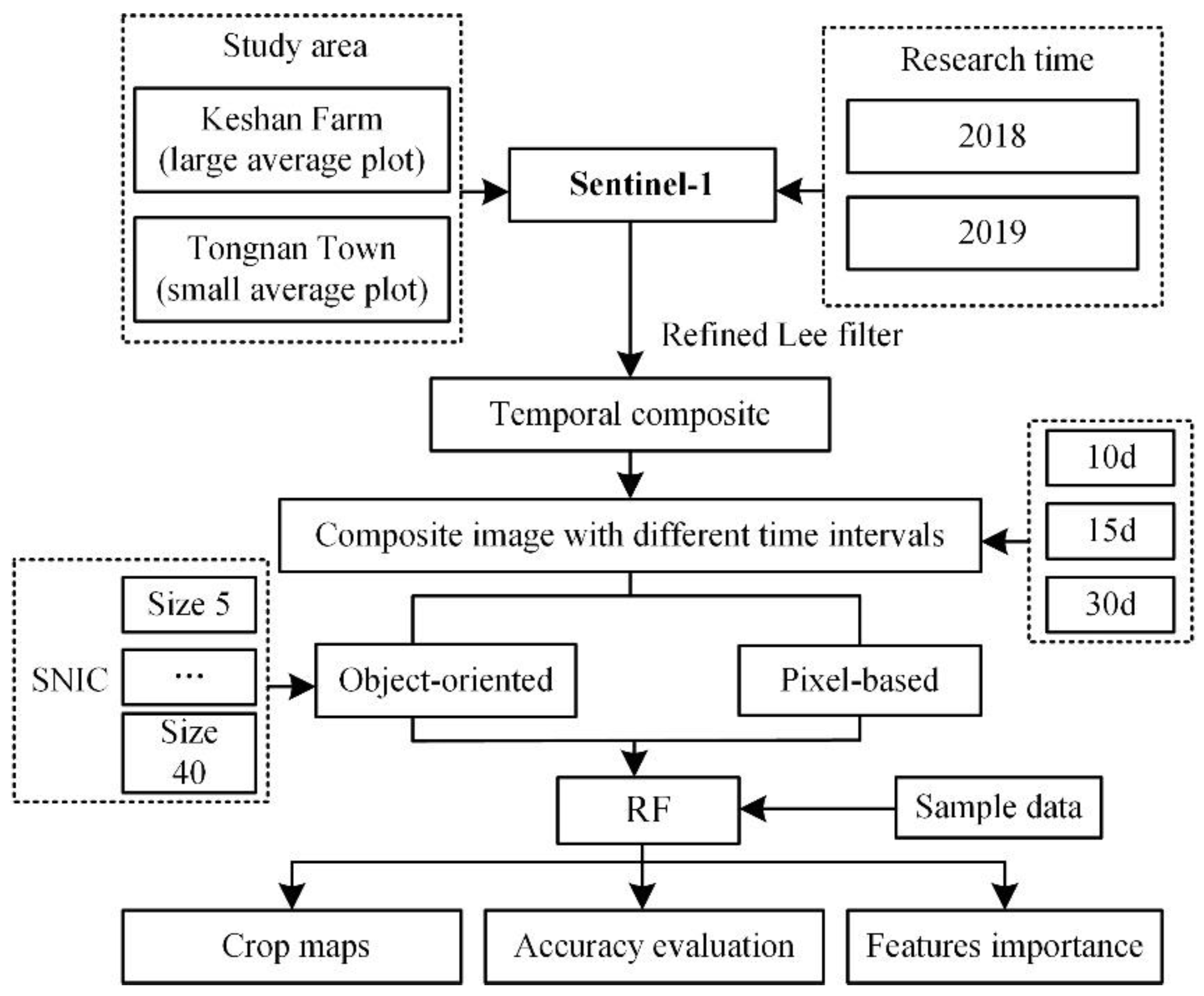
2. Materials and Methods
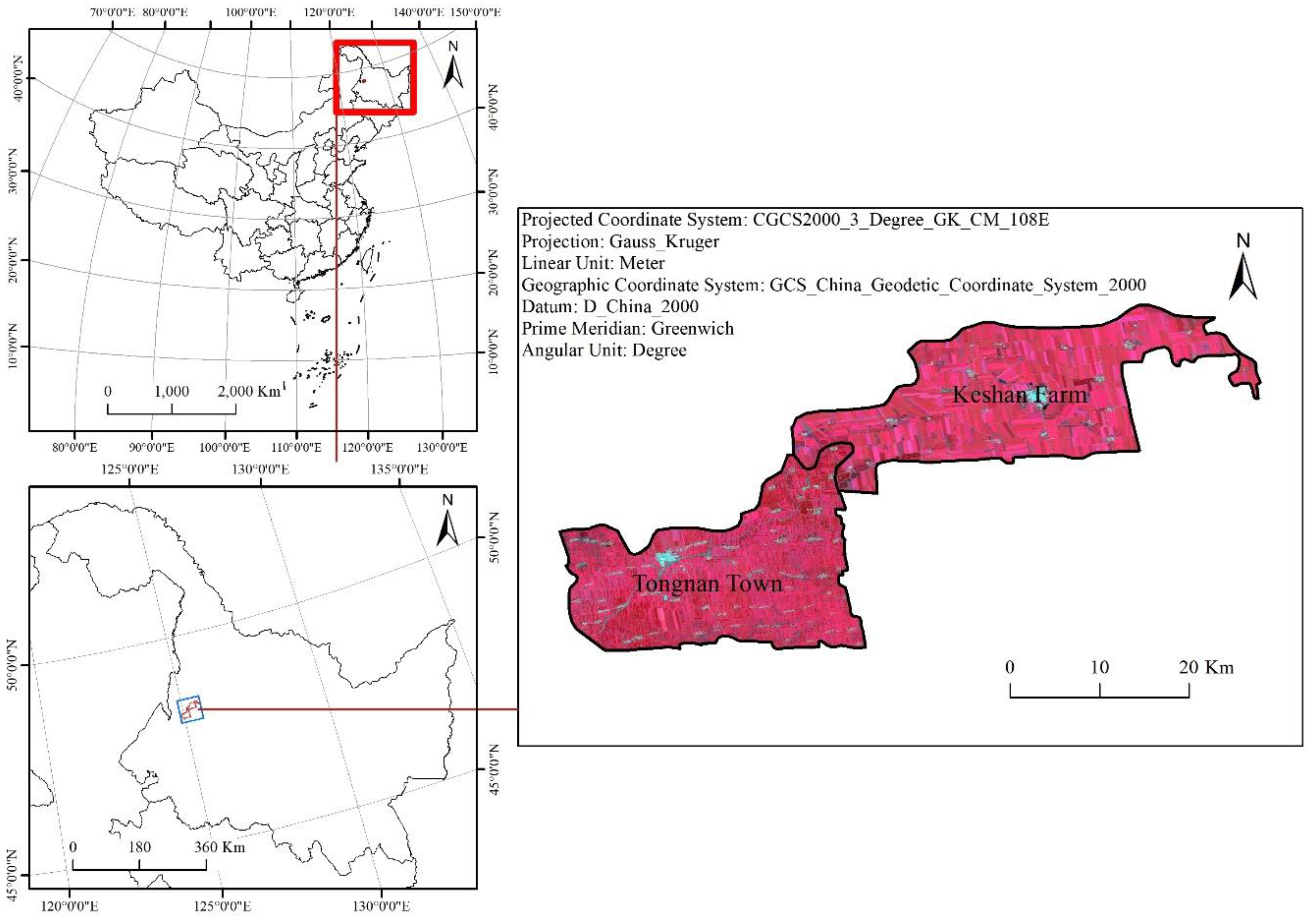
2.1. Study Area
2.2. Data Selection and Preprocessing
2.2.1. Sentinel-1 SAR Image and Preprocessing
2.2.2. Reference Data
2.3. Image Segmentation
2.4. Random Forest
2.5. Accuracy Verification
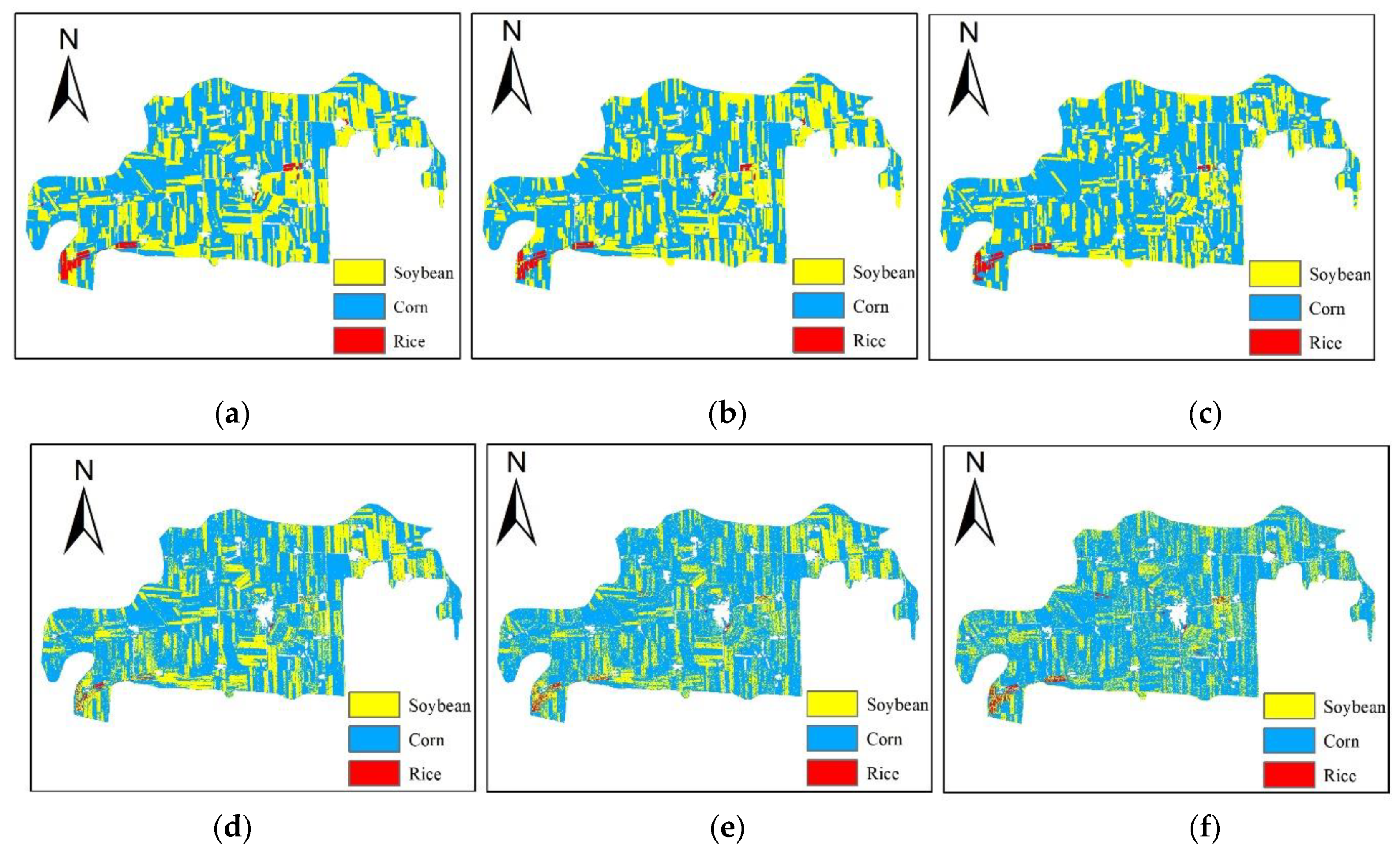
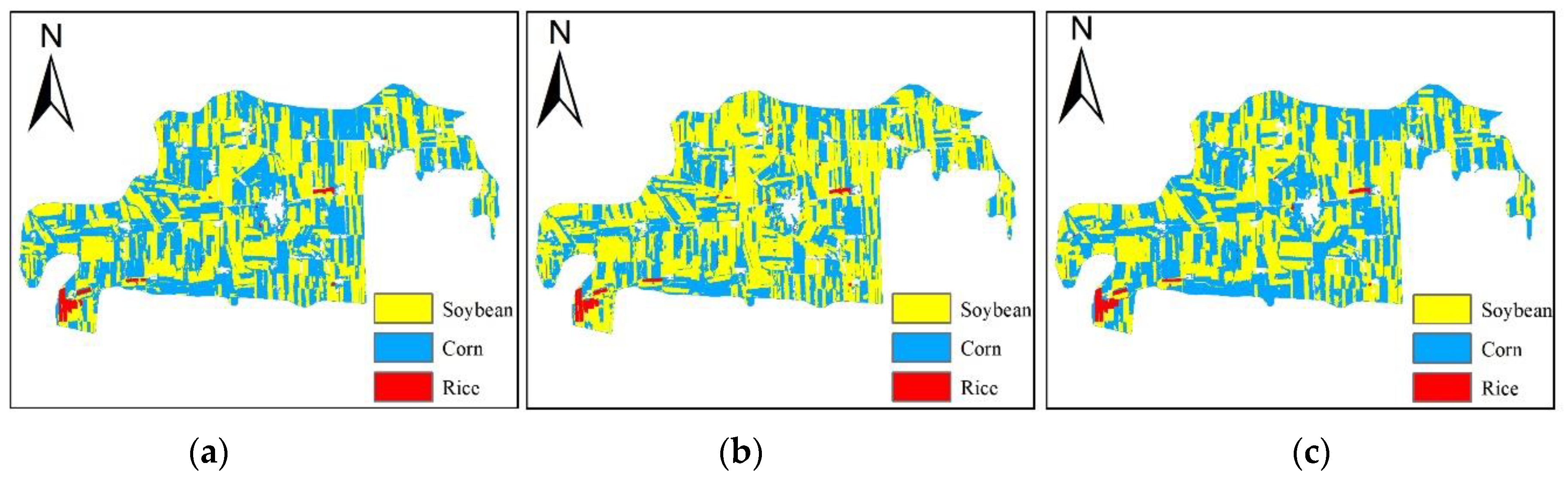
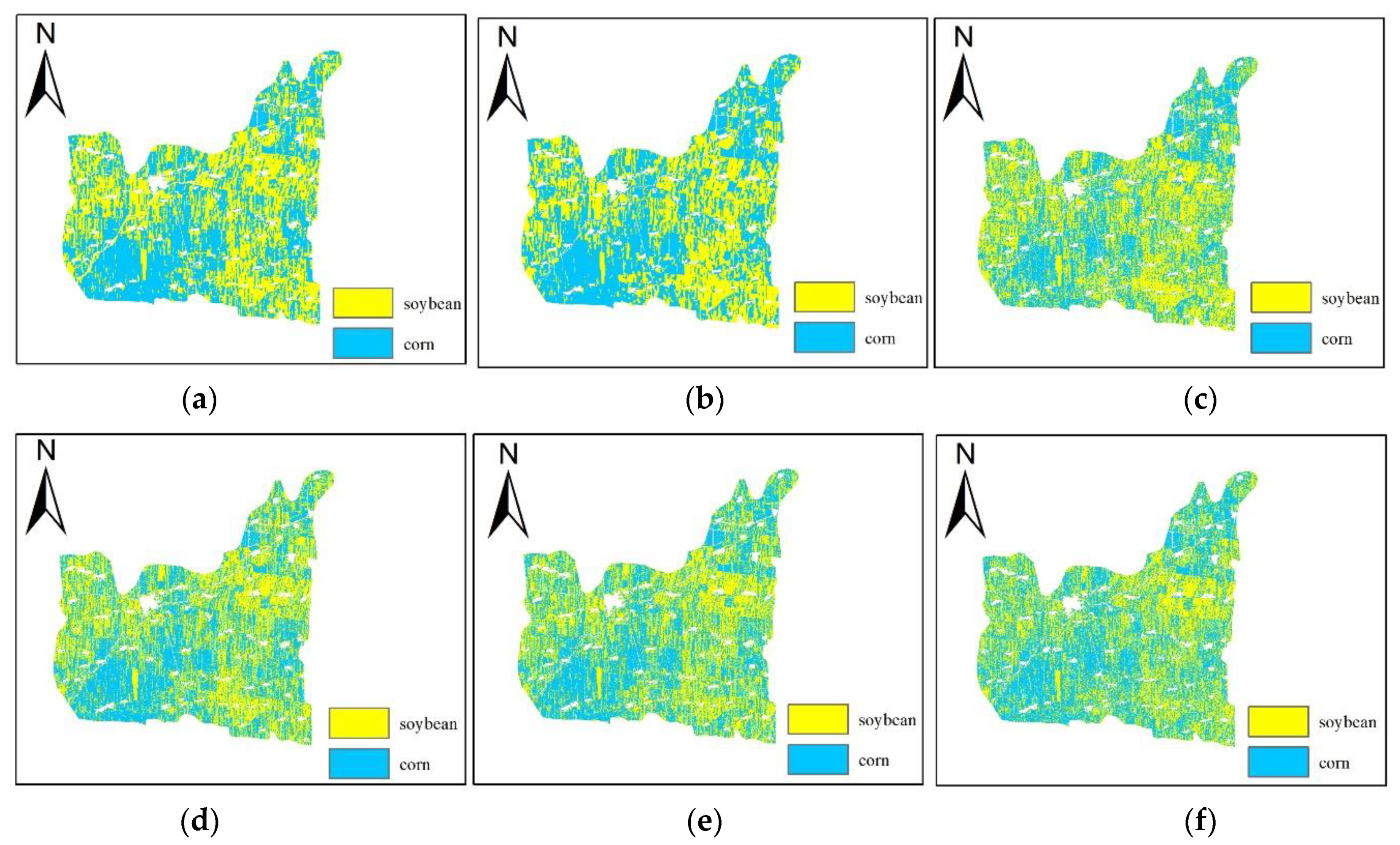
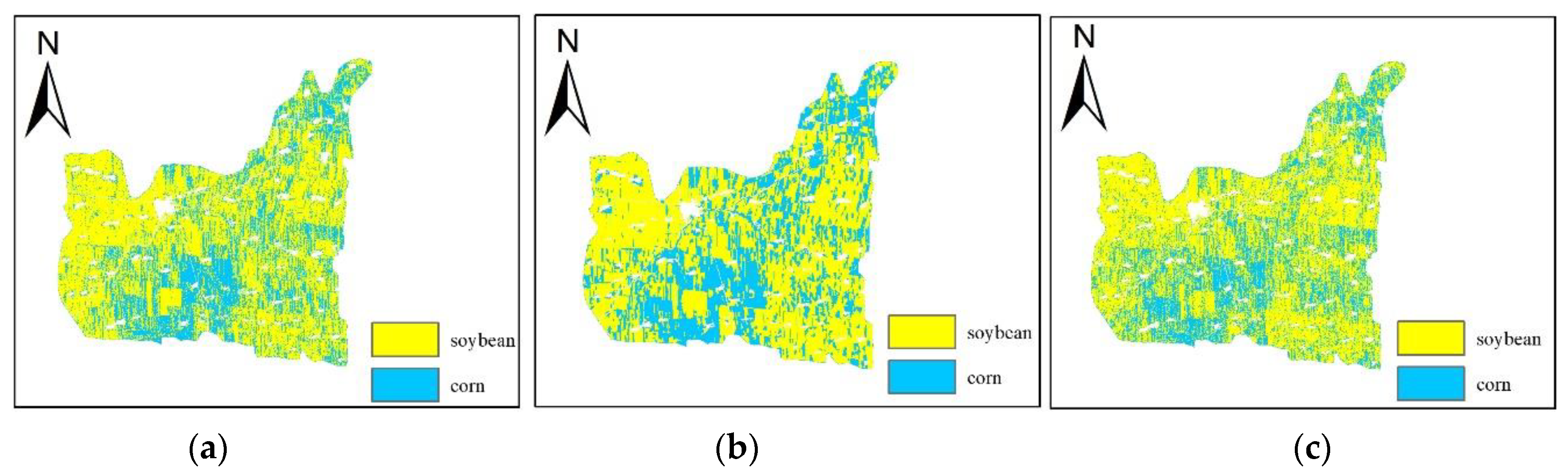
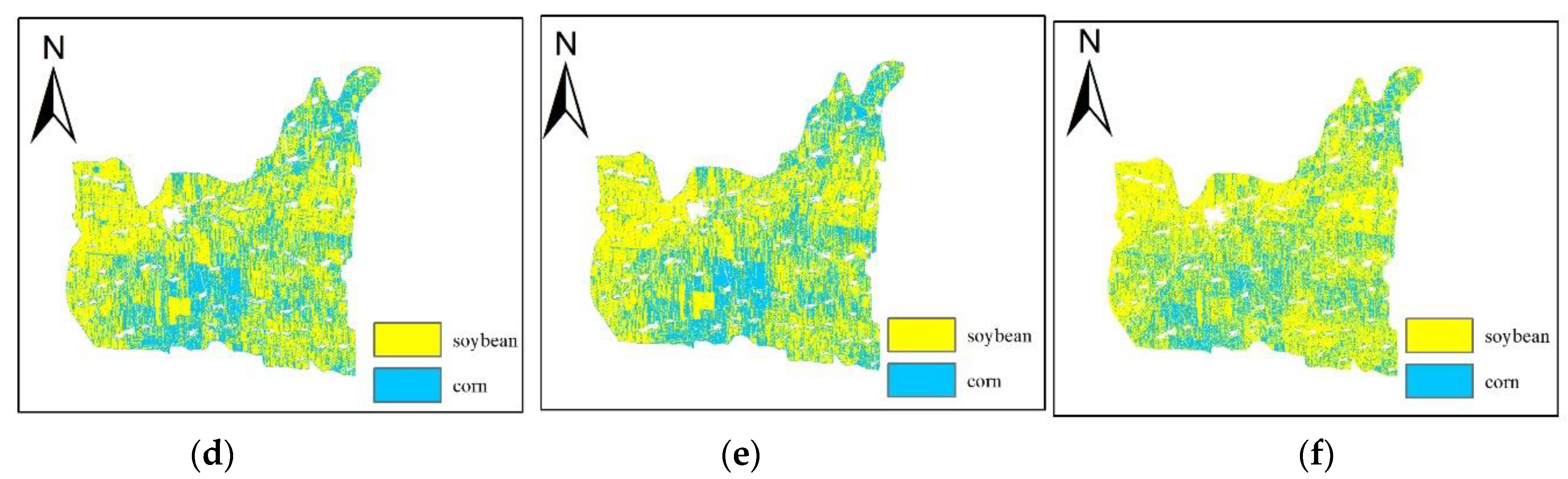
3. Results
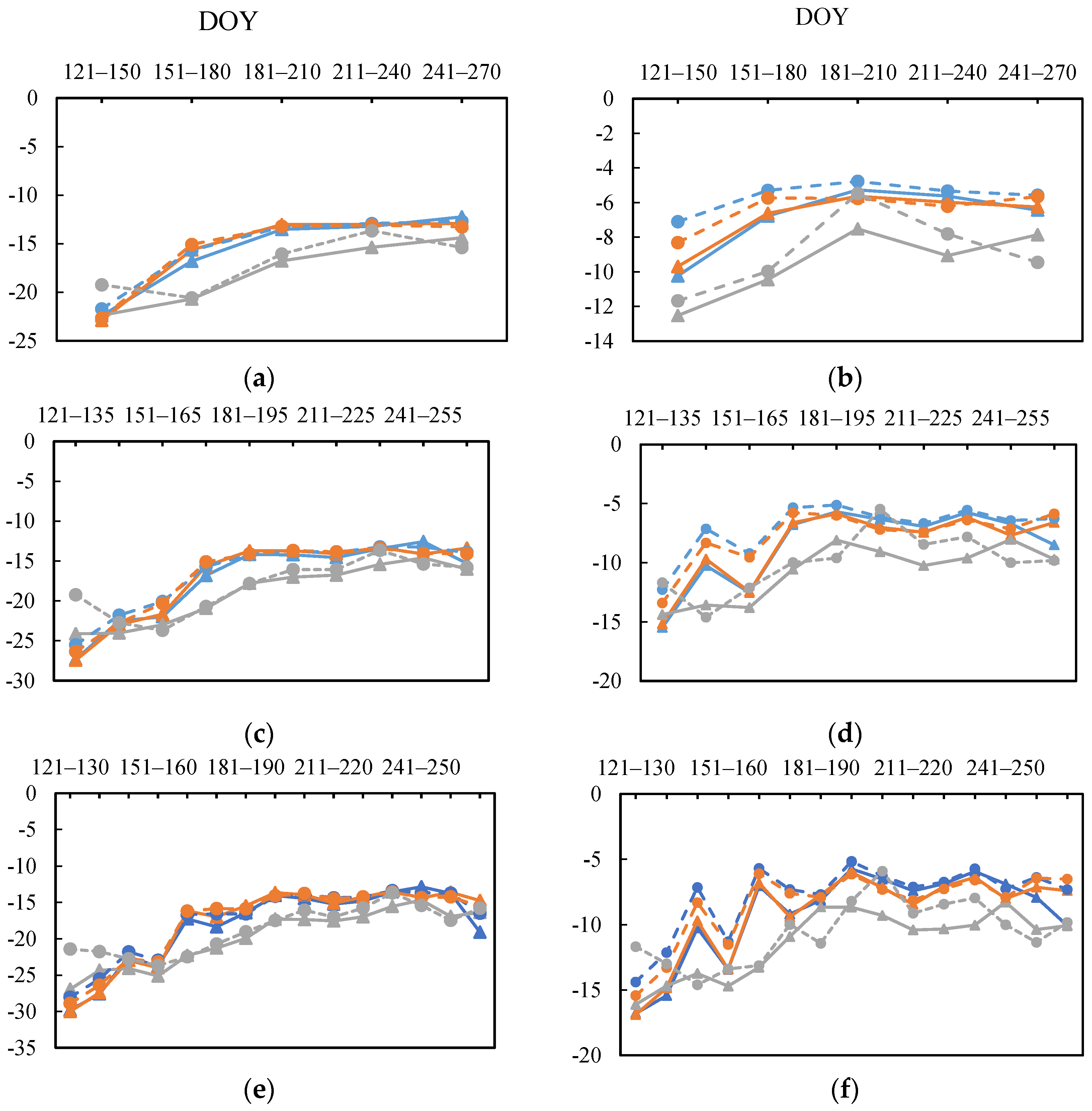
3.1. Sentinel-1 Time Series
3.2. Overall Accuracy Assessment
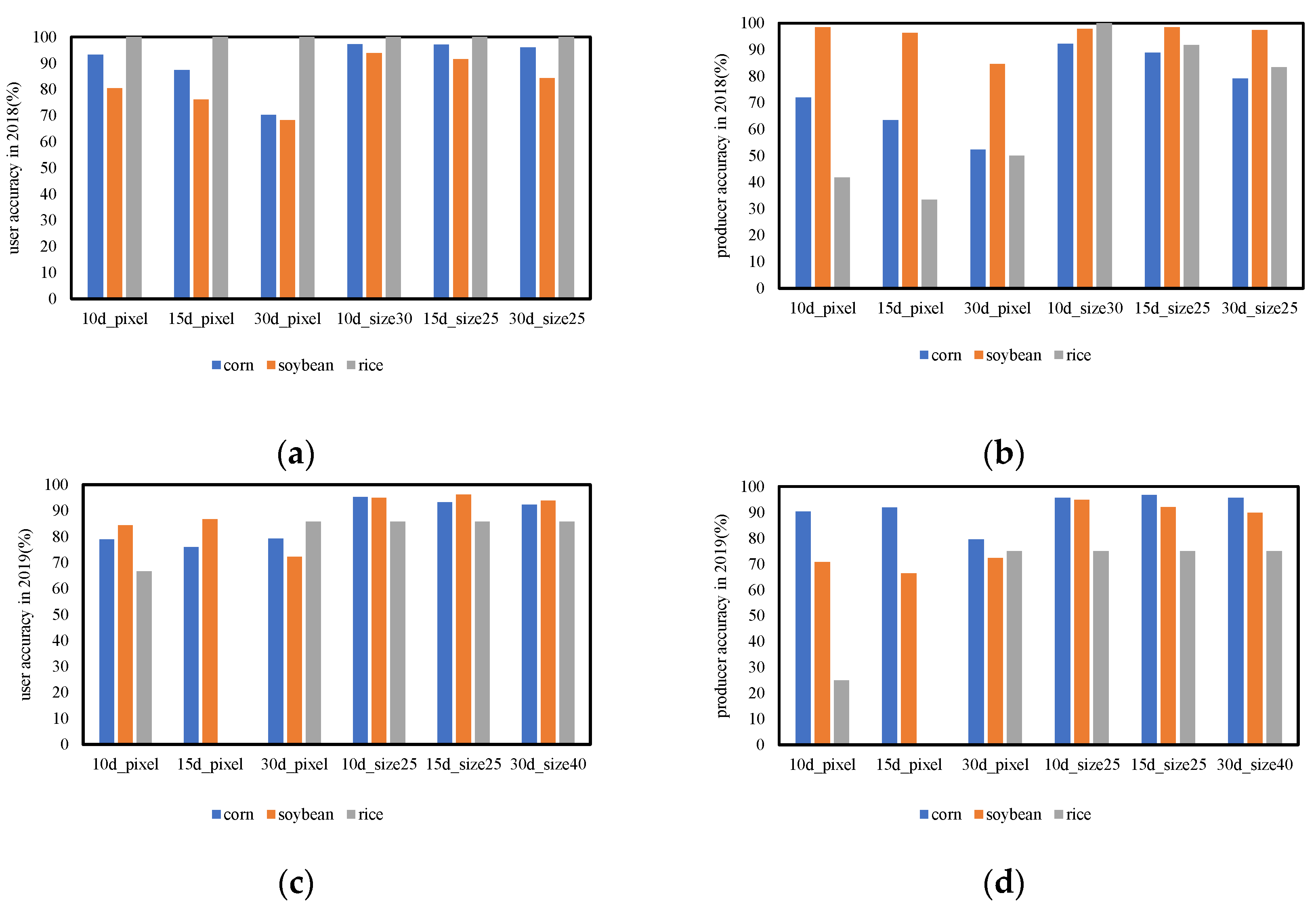
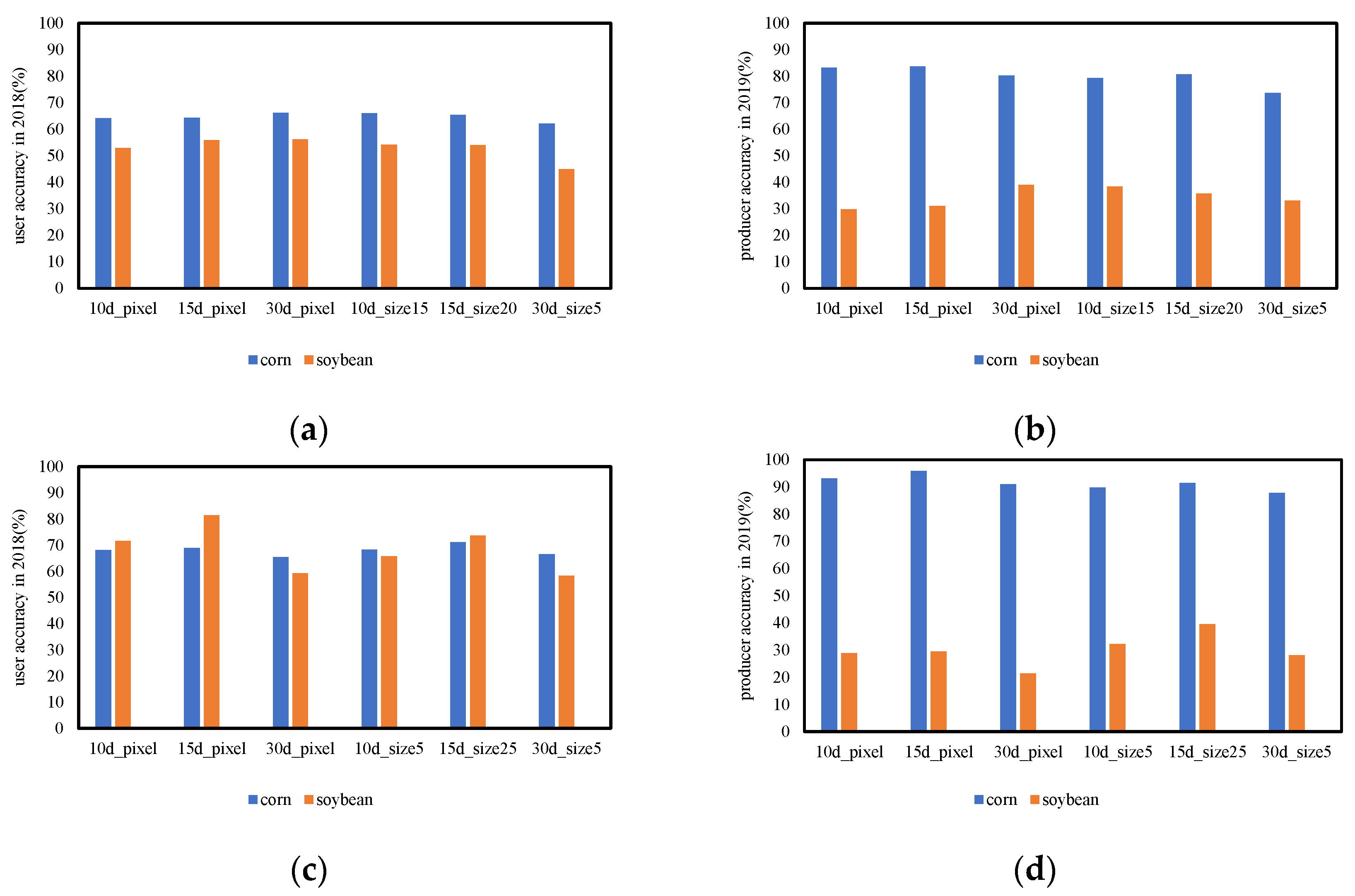
3.3. User Accuracy and Producer Accuracy
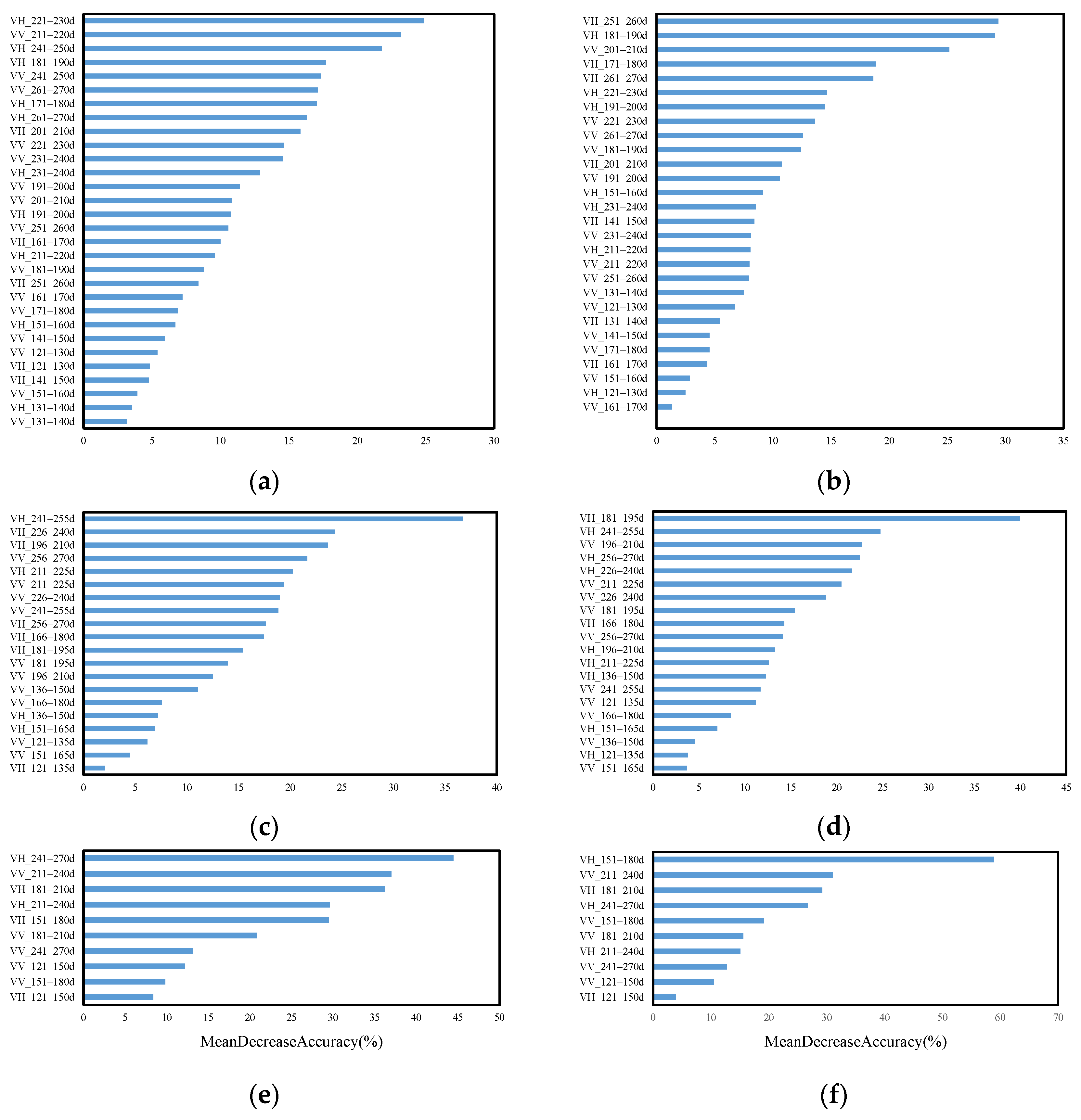
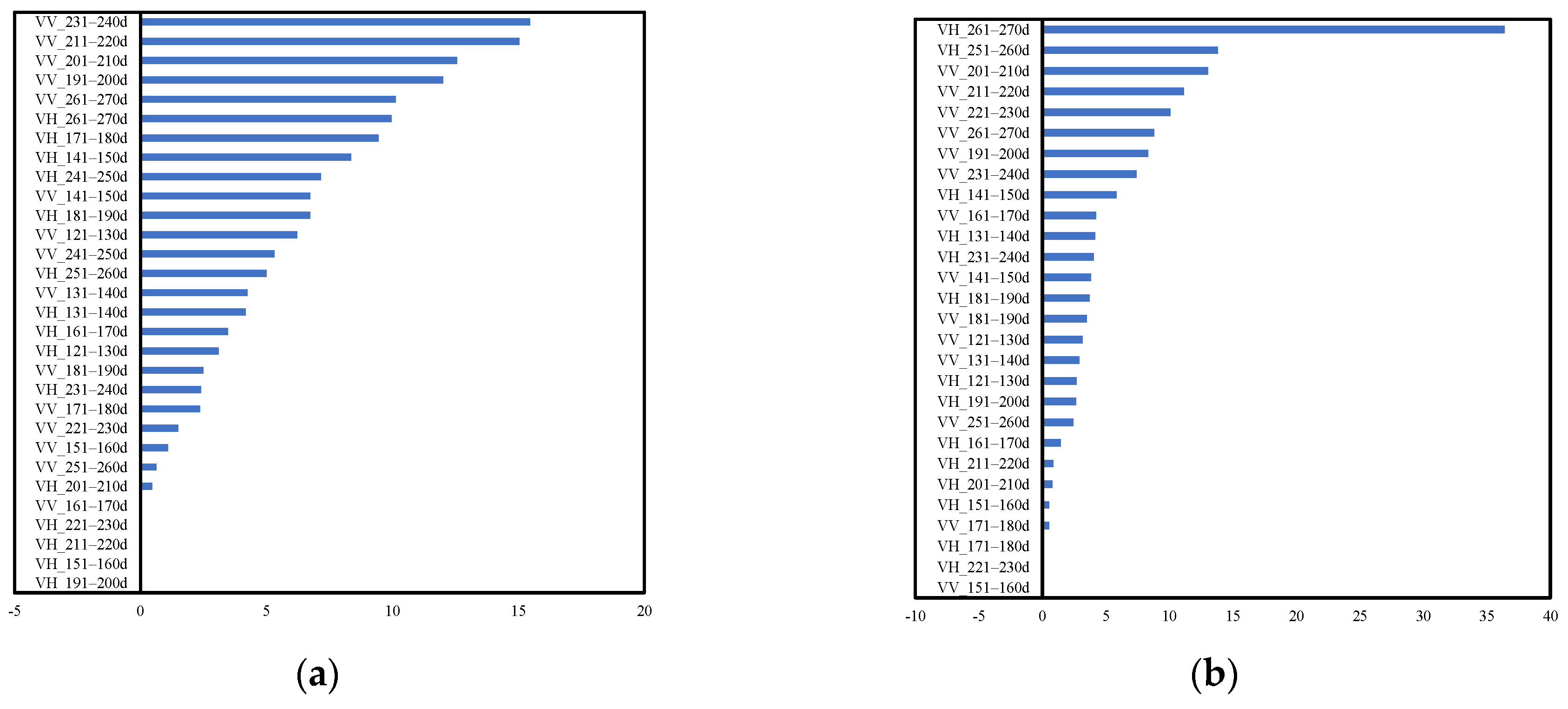
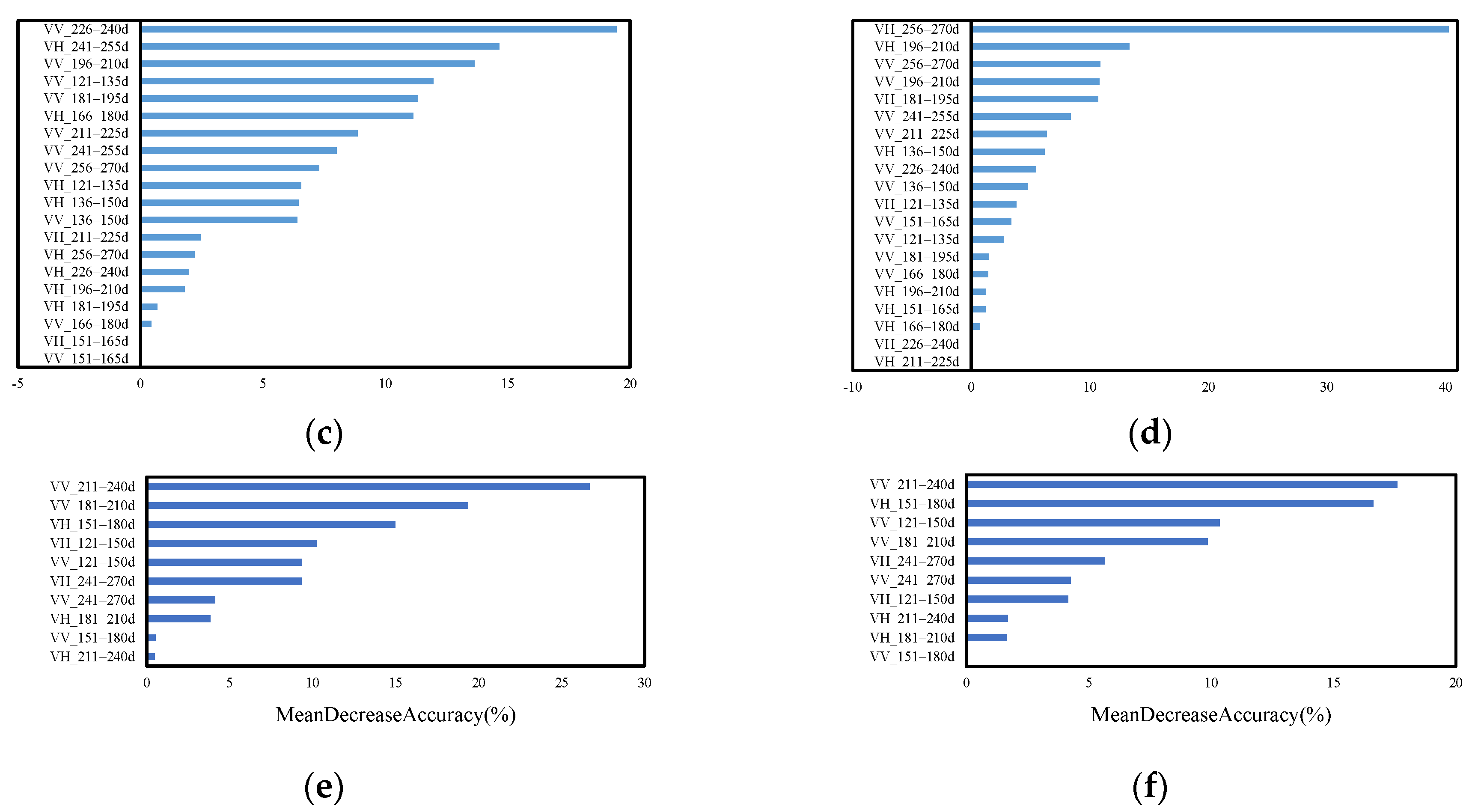
3.4. Features Importance Assessment
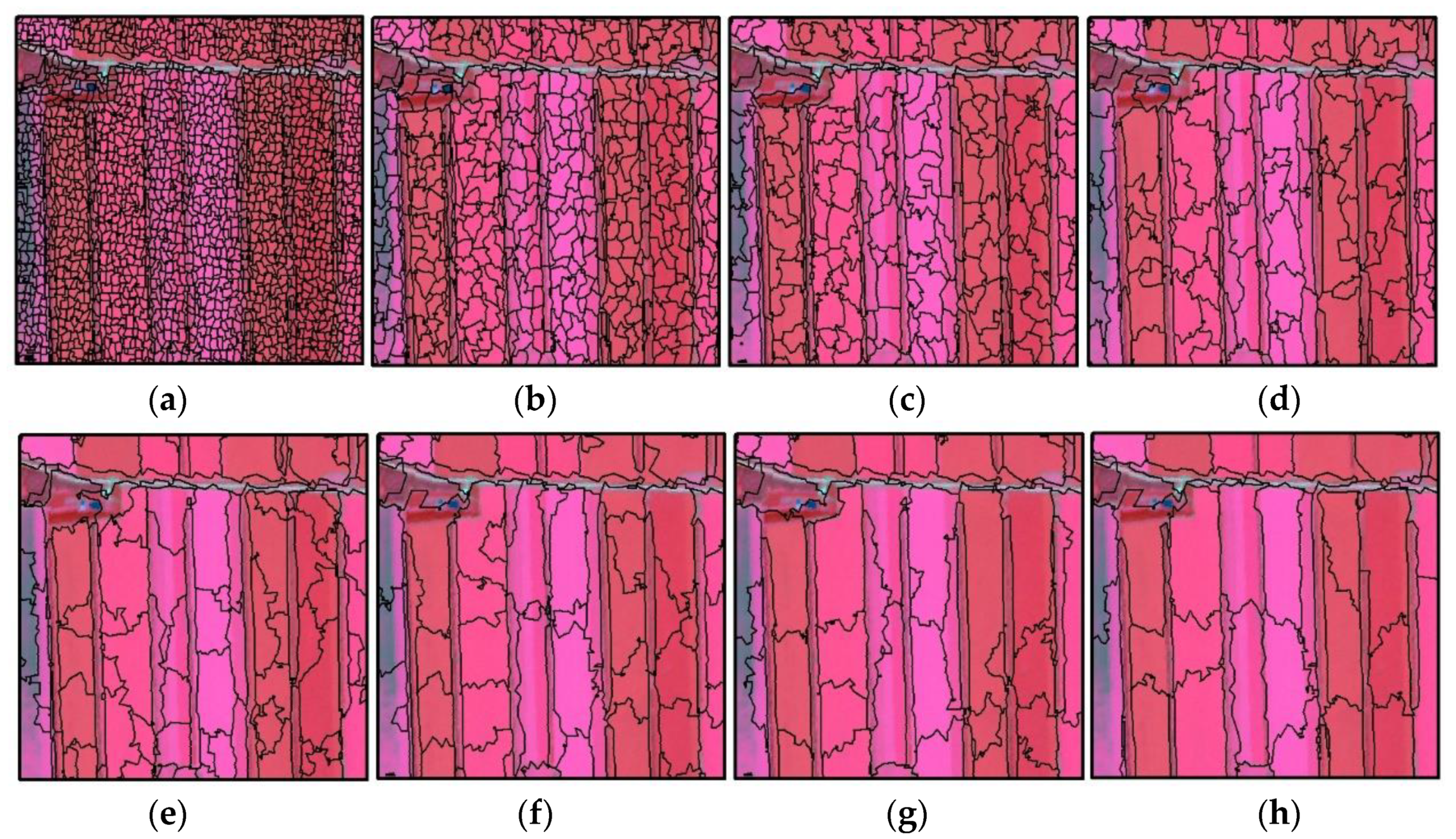
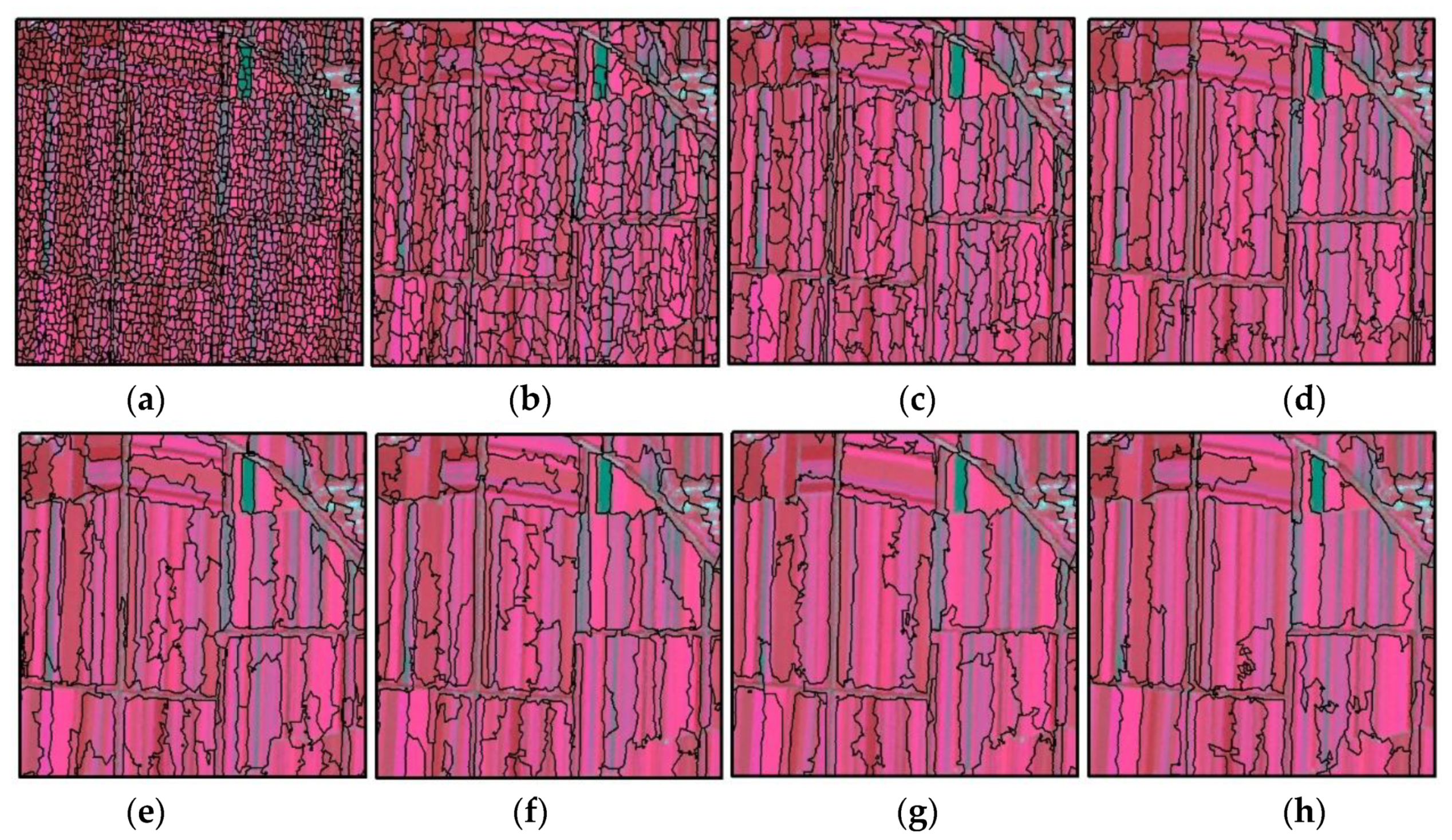
3.5. Determination of the Optimal Segmentation Size
4. Discussion
4.1. Advantages of Using Time Series Sentinel-1 Images Combined with Object-Oriented Classification Methods
4.2. Advantages of Using GEE
4.3. The Relationship between Image Resolution and Optimal Segmentation Size
4.4. Uncertainty of the Method
4.5. Future Research Directions
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Carvalho, F.P. Agriculture, pesticides, food security and food safety. Environ. Sci. Policy 2006, 9, 685–692. [Google Scholar] [CrossRef]
- McMichael, P. The power of food. Agric. Hum. Values 2000, 17, 21–33. [Google Scholar] [CrossRef]
- Schmidhuber, J.; Tubiello, F.N. Global food security under climate change. Proc. Natl. Acad. Sci. USA 2007, 104, 19703–19708. [Google Scholar] [CrossRef]
- Garnett, T.; Appleby, M.C.; Balmford, A.; Bateman, I.J.; Benton, T.G.; Bloomer, P.; Burlingame, B.; Dawkins, M.; Dolan, L.; Fraser, D. Sustainable intensification in agriculture: Premises and policies. Science 2013, 341, 33–34. [Google Scholar] [CrossRef] [PubMed]
- Godfray, H.C.J.; Crute, I.R.; Haddad, L.; Lawrence, D.; Muir, J.F.; Nisbett, N.; Pretty, J.; Robinson, S.; Toulmin, C.; Whiteley, R. The future of the global food system. Philos. Trans. R Soc. Lond. B Biol. Sci. 2010, 365, 2769–2777. [Google Scholar] [CrossRef] [PubMed]
- Opara, L.U. Traceability in agriculture and food supply chain: A review of basic concepts, technological implications, and future prospects. J. Food Agric. Environ. 2003, 1, 101–106. [Google Scholar]
- Davis, K.F.; Rulli, M.C.; Seveso, A.; D’Odorico, P. Increased food production and reduced water use through optimized crop distribution. Nat. Geosci. 2017, 10, 919. [Google Scholar] [CrossRef]
- Rockström, J.; Williams, J.; Daily, G.; Noble, A.; Matthews, N.; Gordon, L.; Wetterstrand, H.; DeClerck, F.; Shah, M.; Steduto, P. Sustainable intensification of agriculture for human prosperity and global sustainability. AMBIO 2017, 46, 4–17. [Google Scholar] [CrossRef]
- Pervez, M.S.; Brown, J.F. Mapping irrigated lands at 250-m scale by merging MODIS data and national agricultural statistics. Remote Sens. 2010, 2, 2388–2412. [Google Scholar] [CrossRef]
- Gumma, M.K.; Thenkabail, P.S.; Maunahan, A.; Islam, S.; Nelson, A. Mapping seasonal rice cropland extent and area in the high cropping intensity environment of Bangladesh using MODIS 500 m data for the year 2010. ISPRS J. Photogramm. Remote Sens. 2014, 91, 98–113. [Google Scholar] [CrossRef]
- Joshi, N.; Baumann, M.; Ehammer, A.; Fensholt, R.; Grogan, K.; Hostert, P.; Jepsen, M.R.; Kuemmerle, T.; Meyfroidt, P.; Mitchard, E.T. A review of the application of optical and radar remote sensing data fusion to land use mapping and monitoring. Remote Sens. 2016, 8, 70. [Google Scholar] [CrossRef]
- Huang, Y.; Chen, Z.-x.; Tao, Y.; Huang, X.-z.; Gu, X.-f. Agricultural remote sensing big data: Management and applications. J. Integr. Agric. 2018, 17, 1915–1931. [Google Scholar] [CrossRef]
- Kussul, N.; Lemoine, G.; Gallego, F.J.; Skakun, S.V.; Lavreniuk, M.; Shelestov, A.Y. Parcel-based crop classification in ukraine using landsat-8 data and sentinel-1A data. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2500–2508. [Google Scholar] [CrossRef]
- Kussul, N.; Lavreniuk, M.; Skakun, S.; Shelestov, A. Deep learning classification of land cover and crop types using remote sensing data. IEEE Geosci. Remote Sens. Lett. 2017, 14, 778–782. [Google Scholar] [CrossRef]
- Belgiu, M.; Csillik, O. Sentinel-2 cropland mapping using pixel-based and object-based time-weighted dynamic time warping analysis. Remote Sens. Environ. 2018, 204, 509–523. [Google Scholar] [CrossRef]
- Griffiths, P.; Nendel, C.; Hostert, P. Intra-annual reflectance composites from Sentinel-2 and Landsat for national-scale crop and land cover mapping. Remote Sens. Environ. 2019, 220, 135–151. [Google Scholar] [CrossRef]
- Foga, S.; Scaramuzza, P.L.; Guo, S.; Zhu, Z.; Dilley Jr, R.D.; Beckmann, T.; Schmidt, G.L.; Dwyer, J.L.; Hughes, M.J.; Laue, B. Cloud detection algorithm comparison and validation for operational Landsat data products. Remote Sens. Environ. 2017, 194, 379–390. [Google Scholar] [CrossRef]
- Zhu, Z.; Wang, S.; Woodcock, C.E. Improvement and expansion of the Fmask algorithm: Cloud, cloud shadow, and snow detection for Landsats 4–7, 8, and Sentinel 2 images. Remote Sens. Environ. 2015, 159, 269–277. [Google Scholar] [CrossRef]
- Blaes, X.; Vanhalle, L.; Defourny, P. Efficiency of crop identification based on optical and SAR image time series. Remote Sens. Environ. 2005, 96, 352–365. [Google Scholar] [CrossRef]
- Ndikumana, E.; Ho Tong Minh, D.; Baghdadi, N.; Courault, D.; Hossard, L. Deep recurrent neural network for agricultural classification using multitemporal SAR Sentinel-1 for Camargue, France. Remote Sens. 2018, 10, 1217. [Google Scholar] [CrossRef]
- Xu, L.; Zhang, H.; Wang, C.; Zhang, B.; Liu, M. Crop Classification Based on Temporal Information Using Sentinel-1 SAR Time-Series Data. Remote Sens. 2019, 11, 53. [Google Scholar] [CrossRef]
- Fu, W.; Ma, J.; Chen, P.; Chen, F. Remote Sensing Satellites for Digital Earth. In Manual of Digital Earth; Springer: Berlin, Germany, 2020; pp. 55–123. [Google Scholar]
- Agrawal, S.; Raghavendra, S.; Kumar, S.; Pande, H. Geospatial Data for the Himalayan Region: Requirements, Availability, and Challenges. In Remote Sensing of Northwest Himalayan Ecosystems; Springer: Berlin, Germany, 2019; pp. 471–500. [Google Scholar]
- Liu, C.-A.; Chen, Z.-X.; Yun, S.; Chen, J.-S.; Hasi, T.; Pan, H.-Z. Research advances of SAR remote sensing for agriculture applications: A review. J. Integr. Agric. 2019, 18, 506–525. [Google Scholar] [CrossRef]
- Huang, X.; Wang, J.; Shang, J.; Liao, C.; Liu, J. Application of polarization signature to land cover scattering mechanism analysis and classification using multi-temporal C-band polarimetric RADARSAT-2 imagery. Remote Sens. Environ. 2017, 193, 11–28. [Google Scholar] [CrossRef]
- Jiao, X.; Kovacs, J.M.; Shang, J.; McNairn, H.; Walters, D.; Ma, B.; Geng, X. Object-oriented crop mapping and monitoring using multi-temporal polarimetric RADARSAT-2 data. Isprs J. Photogramm. Remote Sens. 2014, 96, 38–46. [Google Scholar] [CrossRef]
- Satalino, G.; Balenzano, A.; Mattia, F.; Davidson, M.W. C-band SAR data for mapping crops dominated by surface or volume scattering. IEEE Geosci. Remote Sens. Lett. 2013, 11, 384–388. [Google Scholar] [CrossRef]
- Nagraj, G.M.; Karegowda, A.G. Crop Mapping using SAR Imagery: An Review. Int. J. Adv. Res. Comput. Sci. 2016, 7, 47–52. [Google Scholar]
- Salehi, B.; Daneshfar, B.; Davidson, A.M. Accurate crop-type classification using multi-temporal optical and multi-polarization SAR data in an object-based image analysis framework. Int. J. Remote Sens. 2017, 38, 4130–4155. [Google Scholar] [CrossRef]
- Tomppo, E.; Antropov, O.; Praks, J. Cropland Classification Using Sentinel-1 Time Series: Methodological Performance and Prediction Uncertainty Assessment. Remote Sens. 2019, 11, 2480. [Google Scholar] [CrossRef]
- Gorelick, N.; Hancher, M.; Dixon, M.; Ilyushchenko, S.; Thau, D.; Moore, R. Google Earth Engine: Planetary-scale geospatial analysis for everyone. Remote Sens. Environ. 2017, 202, 18–27. [Google Scholar] [CrossRef]
- Dong, J.; Xiao, X.; Menarguez, M.A.; Zhang, G.; Qin, Y.; Thau, D.; Biradar, C.; Moore III, B. Mapping paddy rice planting area in northeastern Asia with Landsat 8 images, phenology-based algorithm and Google Earth Engine. Remote Sens. Environ. 2016, 185, 142–154. [Google Scholar] [CrossRef]
- Luo, C.; Liu, H.-j.; Fu, Q.; Guan, H.-x.; Ye, Q.; Zhang, X.-l.; Kong, F.-c. Mapping the fallowed area of paddy fields on Sanjiang Plain of Northeast China to assist water security assessments. J. Integr. Agric. 2020, 19, 1885–1896. [Google Scholar] [CrossRef]
- Zurqani, H.A.; Post, C.J.; Mikhailova, E.A.; Cope, M.P.; Allen, J.S.; Lytle, B.A. Evaluating the integrity of forested riparian buffers over a large area using LiDAR data and Google Earth Engine. Sci. Rep. 2020, 10, 14096. [Google Scholar] [CrossRef] [PubMed]
- Jia, M.; Wang, Z.; Mao, D.; Ren, C.; Wang, C.; Wang, Y. Rapid, robust, and automated mapping of tidal flats in China using time series Sentinel-2 images and Google Earth Engine. Remote Sens. Environ. 2021, 255, 112285. [Google Scholar] [CrossRef]
- Malenovský, Z.; Rott, H.; Cihlar, J.; Schaepman, M.E.; García-Santos, G.; Fernandes, R.; Berger, M. Sentinels for science: Potential of Sentinel-1,-2, and-3 missions for scientific observations of ocean, cryosphere, and land. Remote Sens. Environ. 2012, 120, 91–101. [Google Scholar] [CrossRef]
- You, N.; Dong, J. Examining earliest identifiable timing of crops using all available Sentinel 1/2 imagery and Google Earth Engine. ISPRS J. Photogramm. Remote Sens. 2020, 161, 109–123. [Google Scholar] [CrossRef]
- Torres, R.; Snoeij, P.; Geudtner, D.; Bibby, D.; Davidson, M.; Attema, E.; Potin, P.; Rommen, B.; Floury, N.; Brown, M.; et al. GMES Sentinel-1 mission. Remote Sens. Environ. 2012, 120, 9–24. [Google Scholar] [CrossRef]
- Sun, Z.; Luo, J.; Yang, J.; Yu, Q.; Zhang, L.; Xue, K.; Lu, L. Nation-Scale Mapping of Coastal Aquaculture Ponds with Sentinel-1 SAR Data Using Google Earth Engine. Remote Sens. 2020, 12, 3086. [Google Scholar] [CrossRef]
- Hu, L.; Xu, N.; Liang, J.; Li, Z.; Chen, L.; Zhao, F. Advancing the Mapping of Mangrove Forests at National-Scale Using Sentinel-1 and Sentinel-2 Time-Series Data with Google Earth Engine: A Case Study in China. Remote Sens. 2020, 12, 3120. [Google Scholar] [CrossRef]
- Gašparović, M.; Dobrinić, D. Comparative assessment of machine learning methods for urban vegetation mapping using multitemporal sentinel-1 imagery. Remote Sens. 2020, 12, 1952. [Google Scholar] [CrossRef]
- Lee, J.-S.; Wen, J.-H.; Ainsworth, T.L.; Chen, K.-S.; Chen, A.J.J.I.T.o.G.; Sensing, R. Improved sigma filter for speckle filtering of SAR imagery. IEEE Trans. Geosci. Remote Sens. 2008, 47, 202–213. [Google Scholar]
- Yommy, A.S.; Liu, R.; Wu, S. SAR image despeckling using refined Lee filter. In Proceedings of the 2015 7th International Conference on Intelligent Human-Machine Systems and Cybernetics, Hangzhou, China, 26–27 August 2015; pp. 260–265. [Google Scholar]
- Achanta, R.; Susstrunk, S. Superpixels and polygons using simple non-iterative clustering. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, San Juan, PR, USA, 17–19 June 1997; pp. 4651–4660. [Google Scholar]
- Mahdianpari, M.; Salehi, B.; Mohammadimanesh, F.; Homayouni, S.; Gill, E. The first wetland inventory map of newfoundland at a spatial resolution of 10 m using sentinel-1 and sentinel-2 data on the google earth engine cloud computing platform. Remote Sens. 2019, 11, 43. [Google Scholar] [CrossRef]
- Liaw, A.; Wiener, M. Classification and regression by randomForest. R News 2002, 2, 18–22. [Google Scholar]
- Pal, M. Random forest classifier for remote sensing classification. Int. J. Remote Sens. 2005, 26, 217–222. [Google Scholar] [CrossRef]
- Belgiu, M.; Drăguţ, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Rodriguez-Galiano, V.F.; Ghimire, B.; Rogan, J.; Chica-Olmo, M.; Rigol-Sanchez, J.P. An assessment of the effectiveness of a random forest classifier for land-cover classification. ISPRS J. Photogramm. Remote Sens. 2012, 67, 93–104. [Google Scholar] [CrossRef]
- Park, S.; Im, J.; Park, S.; Yoo, C.; Han, H.; Rhee, J. Classification and Mapping of Paddy Rice by Combining Landsat and SAR Time Series Data. Remote Sens. 2018, 10, 447. [Google Scholar] [CrossRef]
- Tian, F.; Wu, B.; Zeng, H.; Zhang, X.; Xu, J. Efficient Identification of Corn Cultivation Area with Multitemporal Synthetic Aperture Radar and Optical Images in the Google Earth Engine Cloud Platform. Remote Sens. 2019, 11, 629. [Google Scholar] [CrossRef]
- Story, M.; Congalton, R.G. Accuracy assessment: A user’s perspective. Photogramm. Eng. Remote Sens. 1986, 52, 397–399. [Google Scholar]
- Lee, J.-S.; Grunes, M.R.; Pottier, E. Quantitative comparison of classification capability: Fully polarimetric versus dual and single-polarization SAR. IEEE Trans. Geosci. Remote Sens. 2001, 39, 2343–2351. [Google Scholar]
- Skriver, H. Crop classification by multitemporal C-and L-band single-and dual-polarization and fully polarimetric SAR. IEEE Trans. Geosci. Remote Sens. 2011, 50, 2138–2149. [Google Scholar] [CrossRef]
- Wu, F.; Wang, C.; Zhang, H.; Zhang, B.; Tang, Y. Rice crop monitoring in South China with RADARSAT-2 quad-polarization SAR data. IEEE Geosci. Remote Sens. Lett. 2010, 8, 196–200. [Google Scholar] [CrossRef]
- Huang, X.; Liao, C.; Xing, M.; Ziniti, B.; Wang, J.; Shang, J.; Liu, J.; Dong, T.; Xie, Q.; Torbick, N. A multi-temporal binary-tree classification using polarimetric RADARSAT-2 imagery. Remote Sens. Environ. 2019, 235, 111478. [Google Scholar] [CrossRef]
- Qi, Z.; Yeh, A.G.-O.; Li, X.; Lin, Z. A novel algorithm for land use and land cover classification using RADARSAT-2 polarimetric SAR data. Remote Sens. Environ. 2012, 118, 21–39. [Google Scholar] [CrossRef]
- Skakun, S.; Kussul, N.; Shelestov, A.Y.; Lavreniuk, M.; Kussul, O. Efficiency assessment of multitemporal C-band Radarsat-2 intensity and Landsat-8 surface reflectance satellite imagery for crop classification in Ukraine. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2015, 9, 3712–3719. [Google Scholar] [CrossRef]
- Tassi, A.; Vizzari, M. Object-Oriented LULC Classification in Google Earth Engine Combining SNIC, GLCM, and Machine Learning Algorithms. Remote Sens. 2020, 12, 3776. [Google Scholar] [CrossRef]
- Shen, G.; Yang, X.; Jin, Y.; Luo, S.; Xu, B.; Zhou, Q. Land Use Changes in the Zoige Plateau Based on the Object-Oriented Method and Their Effects on Landscape Patterns. Remote Sens. 2020, 12, 14. [Google Scholar] [CrossRef]
- Hao, P.-Y.; Tang, H.-J.; Chen, Z.-X.; Meng, Q.-Y.; Kang, Y.-P. Early-season crop type mapping using 30-m reference time series. J. Integr. Agric. 2020, 19, 1897–1911. [Google Scholar] [CrossRef]
- Hao, P.-Y.; Tang, H.-J.; Chen, Z.-X.; Le, Y.; Wu, M.-Q. High resolution crop intensity mapping using harmonized Landsat-8 and Sentinel-2 data. J. Integr. Agric. 2019, 18, 2883–2897. [Google Scholar] [CrossRef]
- Holtgrave, A.-K.; Röder, N.; Ackermann, A.; Erasmi, S.; Kleinschmit, B. Comparing Sentinel-1 and -2 Data and Indices for Agricultural Land Use Monitoring. Remote Sens. 2020, 12, 2919. [Google Scholar] [CrossRef]
- Cué La Rosa, L.E.; Queiroz Feitosa, R.; Nigri Happ, P.; Del’Arco Sanches, I.; Ostwald Pedro da Costa, G.A. Combining Deep Learning and Prior Knowledge for Crop Mapping in Tropical Regions from Multitemporal SAR Image Sequences. Remote Sens. 2019, 11, 2029. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Jan | Feb | Mar | Apr | May | Jun | Jul | Aug | Sep | Oct | Nov | Dec | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| corn | S | G | G | G | H | H | ||||||
| rice | S | G | G | G | H | H | ||||||
| soybeans | S | G | G | G | H |
| Location | Number of Plots | Average Area (m2) | Average Circumference (m) | Average Area Circumference Ratio | |
|---|---|---|---|---|---|
| 2018 | Keshan Farm | 483 | 333,499.50 | 3126.49 | 101.77 |
| 2019 | Keshan Farm | 486 | 342,129.04 | 3137.81 | 103.94 |
| 2018 | Tongnan Town | 511 | 29,175.02 | 1256.92 | 21.15 |
| 2019 | Tongnan Town | 542 | 40,173.86 | 1313.92 | 26.85 |
| Year | Study Area | Interval | Size | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pixel | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | |||
| 2018 | Keshan Farm | 10 d | 84.99 | 88.10 | 93.20 | 93.77 | 94.62 | 92.92 | 95.47 | 94.33 | 94.05 |
| 15 d | 79.89 | 87.25 | 91.22 | 93.77 | 93.20 | 94.05 | 94.05 | 93.48 | 91.78 | ||
| 30 d | 69.41 | 77.62 | 84.42 | 87.82 | 88.10 | 88.95 | 86.69 | 88.10 | 86.69 | ||
| Tongnan Town | 10 d | 72.04 | 76.08 | 76.88 | 76.88 | 74.19 | 72.04 | 73.12 | 75.54 | 69.62 | |
| 15 d | 75.00 | 74.19 | 73.39 | 74.46 | 75.81 | 73.12 | 72.04 | 73.92 | 69.89 | ||
| 30 d | 71.51 | 75.81 | 71.51 | 72.31 | 71.77 | 67.20 | 68.01 | 64.78 | 68.55 | ||
| 2019 | Keshan Farm | 10 d | 80.66 | 90.33 | 92.75 | 94.86 | 93.96 | 94.86 | 94.26 | 94.56 | 93.66 |
| 15 d | 79.15 | 85.20 | 90.03 | 92.45 | 90.94 | 94.26 | 93.05 | 93.05 | 94.26 | ||
| 30 d | 76.44 | 83.08 | 85.20 | 88.82 | 91.54 | 91.24 | 92.45 | 92.15 | 92.75 | ||
| Tongnan Town | 10 d | 79.58 | 80.90 | 78.51 | 77.45 | 73.47 | 75.60 | 72.94 | 72.68 | 72.15 | |
| 15 d | 78.51 | 78.78 | 76.13 | 76.13 | 75.86 | 79.58 | 75.86 | 72.41 | 72.94 | ||
| 30 d | 68.70 | 74.80 | 70.56 | 70.56 | 71.88 | 71.35 | 70.29 | 72.68 | 70.29 | ||
| Year | Interval | Size | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pixel | 5 | 10 | 15 | 20 | 25 | 30 | 35 | 40 | |||
| 2018 | Keshan Farm | 10 d | 0.70 | 0.77 | 0.87 | 0.88 | 0.90 | 0.87 | 0.91 | 0.89 | 0.89 |
| 15 d | 0.60 | 0.75 | 0.83 | 0.88 | 0.87 | 0.89 | 0.89 | 0.88 | 0.84 | ||
| 30 d | 0.40 | 0.56 | 0.70 | 0.76 | 0.77 | 0.79 | 0.74 | 0.77 | 0.75 | ||
| Tongnan Town | 10 d | 0.44 | 0.52 | 0.54 | 0.54 | 0.49 | 0.45 | 0.47 | 0.52 | 0.40 | |
| 15 d | 0.50 | 0.49 | 0.47 | 0.50 | 0.52 | 0.47 | 0.44 | 0.48 | 0.41 | ||
| 30 d | 0.43 | 0.52 | 0.44 | 0.45 | 0.44 | 0.35 | 0.37 | 0.30 | 0.38 | ||
| 2019 | Keshan Farm | 10 d | 0.61 | 0.81 | 0.86 | 0.90 | 0.88 | 0.90 | 0.89 | 0.89 | 0.88 |
| 15 d | 0.57 | 0.70 | 0.80 | 0.85 | 0.82 | 0.89 | 0.86 | 0.86 | 0.89 | ||
| 30 d | 0.54 | 0.67 | 0.71 | 0.78 | 0.83 | 0.83 | 0.85 | 0.85 | 0.86 | ||
| Tongnan Town | 10 d | 0.58 | 0.61 | 0.56 | 0.54 | 0.45 | 0.51 | 0.44 | 0.44 | 0.42 | |
| 15 d | 0.57 | 0.57 | 0.51 | 0.52 | 0.51 | 0.58 | 0.51 | 0.45 | 0.45 | ||
| 30 d | 0.33 | 0.46 | 0.39 | 0.40 | 0.42 | 0.42 | 0.39 | 0.44 | 0.38 | ||
| Number | Average Long Side | Average Short Side | Average Optimal Size | Average Short Side/Image Resolution | |
|---|---|---|---|---|---|
| 2018 ks | 493 | 1308.03 | 254.96 | 26.67 | 25.50 |
| 2019 ks | 486 | 1306.04 | 261.95 | 30 | 26.20 |
| 2018 tn | 511 | 577.48 | 50.52 | 13.33 | 5.05 |
| 2019 tn | 542 | 587.64 | 68.36 | 11.67 | 6.84 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, C.; Qi, B.; Liu, H.; Guo, D.; Lu, L.; Fu, Q.; Shao, Y. Using Time Series Sentinel-1 Images for Object-Oriented Crop Classification in Google Earth Engine. Remote Sens. 2021, 13, 561. https://doi.org/10.3390/rs13040561
Luo C, Qi B, Liu H, Guo D, Lu L, Fu Q, Shao Y. Using Time Series Sentinel-1 Images for Object-Oriented Crop Classification in Google Earth Engine. Remote Sensing. 2021; 13(4):561. https://doi.org/10.3390/rs13040561
Chicago/Turabian StyleLuo, Chong, Beisong Qi, Huanjun Liu, Dong Guo, Lvping Lu, Qiang Fu, and Yiqun Shao. 2021. "Using Time Series Sentinel-1 Images for Object-Oriented Crop Classification in Google Earth Engine" Remote Sensing 13, no. 4: 561. https://doi.org/10.3390/rs13040561
APA StyleLuo, C., Qi, B., Liu, H., Guo, D., Lu, L., Fu, Q., & Shao, Y. (2021). Using Time Series Sentinel-1 Images for Object-Oriented Crop Classification in Google Earth Engine. Remote Sensing, 13(4), 561. https://doi.org/10.3390/rs13040561